A Constrained Attitude Control Module for Small Satellites
|
|
|
- Posy Hopkins
- 5 years ago
- Views:
Transcription
1 A Constrained Attitude Control Module for Small Satellites Henri Kjellberg and E. Glenn Lightsey The University of Texas at Austin Small Satellite Conference Logan, Utah August 14, 2012

2 Motivation for Attitude Constraints Common constraints for a small satellite Goal: A practical algorithm that can be used on CubeSats

3 Example: 3U CubeSat ARMADILLO


4 GN&C Module Design Overview Magnetometer Reaction Wheels Gyroscopes Sun Sensors Thruster Module Torque Rods LPC3250 GN&C Computer (200 MHz) 4




5 Pictures of the Hardware Right Now Top: GN&C Module being assembled Right: Front and back of the flight coldgas thruster module
6 Traditional Constrained Control Methods McInnes, C. R. - Large Angle Slew Maneuvers with Autonomous Sun Vector Avoidance Artificial potential functions Hablani, H., B. - Attitude Commands Avoiding Bright Objects and Maintaining Communications with Ground Station Tangential path around exclusion cones Frazzoli, E., - A Randomized Attitude Slew Planning Algorithm for Autonomous Spacecraft Randomized motion planning algorithms Kim, Y. - On the Convex Parameterization of Constrained Spacecraft Reorientation Semi-definite programming
7 A New Approach to Maneuver Planning Represent all possible directions as pixels on a discretized unit sphere Determine the directions of pointing constraints as regions on the discretized unit sphere Use a pre-existing path finding algorithm to plan a maneuver from the current direction to the desired direction while meeting constraints Provide solved maneuver to attitude control system for execution 7

8 Overview Constrained Control Scheme Note: Step 0 only has to be executed once
 Converts unit vector to")


9 Step 0: Discretize Sphere Icosahedron shell discretization algorithm developed by Tegmark (1996) Converts unit vector to pixel number and vice versa Step 0 Algorithm: 1. Find icosahedron vertices 2. Create rotation matrices for each triangular face 3. Discretize a hexagonal grid onto each triangle 4. Project hexagonal grid onto unit sphere 5. Identify and store each pixel s set of neighbors
 Constraints can take on any shape")
10 Step 1: Find keep-out regions Constraint imposed by sun sensor field-of-view Moon Constraint Sun Constraint Earth Constraint No maximum number of constraints (as long as a feasible path exists) Constraints can take on any shape

11 A* Pathfinding Algorithm Overview


12 A* Pathfinding Cost Model The distance plus path cost for the pixel k is f p k = g p k + h p k The path cost for the pixel k g p k = θ e k, e k 1 + d + g p k 1 The heuristic estimate of distance to goal from the current pixel is h p k, p m = arccos v p k v p m
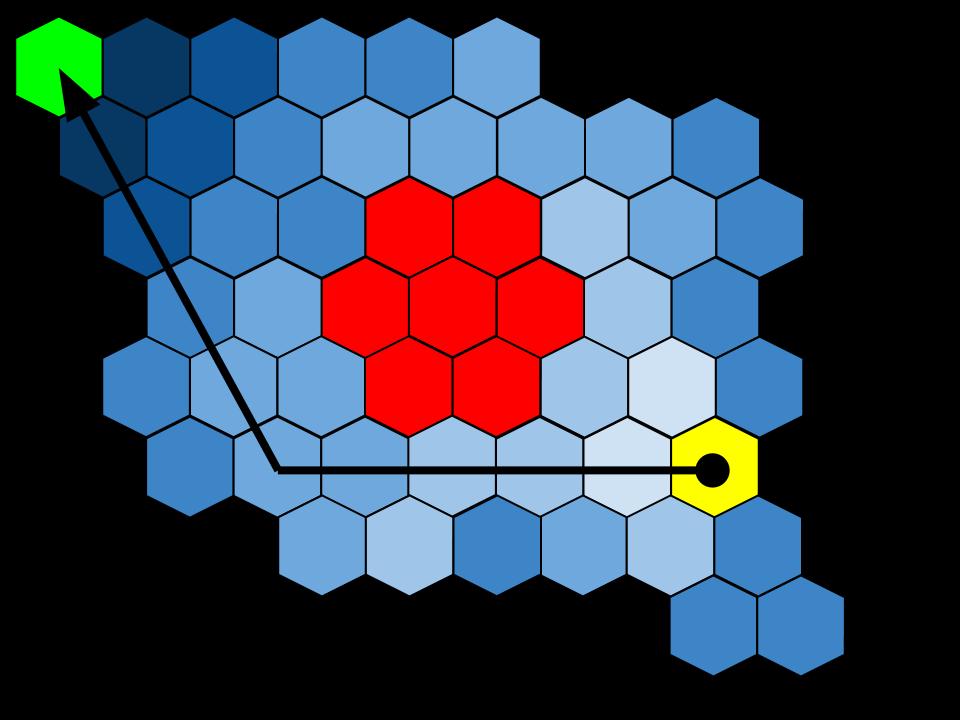
13 Step 2: X-axis admissible path Turning points (red dots) Goal Final trajectory (blue line) Start Pixels checked by A* (cyan) Note: Earth constraint hidden for clarity
14 Step 2: Find rotation quaternion Find vector to next turning point in body frame n B x k + 1 = qi 0 B k n x I k + 1 q I B k 0 Find angle of rotation from current pixel to next turning point pixel φ = arccos n B x k + 1 n B x k Compute quaternion rotation from current pixel of next turning point pixel n B x k + 1 n B x k q B B k + 1 = n B x k + 1 n B x k sin φ 2 cos φ 2 Form inertial quaternion rotation that satisfies the x-axis constraint I q B = q B I B q B
15 Step 2: Rotate about x-axis Rotate the Sun vector from the inertial frame to the body frame B n s k I = q B k n s I k I q B 0 0 k Keep only y and z components B n B s k = 0 n B sy k n sz k Taking the dot product of the sun sensor and y and z components of the sun vector in the body frame yields the angle of rotation about the x-axis that minimizes the sun sensor to Sun angle ψ = arccos n y B k n s B k Form the rotation quaternion and stack with the previous results to form quaternion that satisfies all constraints n y B k n s B k B q B k + 1 = n y B k n s B k sin ψ 2 cos ψ 2 I q B B = q B q B B q B I
16 Step 3: Command rotation sequence From the previous computations we have a set of rotation quaternions to each turning point pixel Using B. Wie s (2008) body rate and torque constrained quaternion error controller u = sat Ksat Pq e + Cw K i = q I i B k 1 I q B k 1 θ max, i = 1,2,3 KP = cjθ max When spacecraft gets close to the next turning point, it moves on to the next one in the set
 maintaining sun within sensor")
17 Step 3: Final trajectory End X-axis trajectory (blue) avoiding bright objects Start Y-axis trajectory (red) maintaining sun within sensor field-of-view
18 QUESTIONS? Contact Information Henri Kjellberg NASA Space Technology Research Fellow E. Glenn Lightsey +1(512)
Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education
 DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
Simple attitude visualization tool for satellite operations
 Simple attitude visualization tool for satellite operations Franck M. Chatel * and Herbert Wuesten DLR - GSOC, Wessling, 82234, Germany Gabriel Mihail LSE, Darmstadt, 64293, Germany The attitude data delivered
Simple attitude visualization tool for satellite operations Franck M. Chatel * and Herbert Wuesten DLR - GSOC, Wessling, 82234, Germany Gabriel Mihail LSE, Darmstadt, 64293, Germany The attitude data delivered
Blue Canyon Technologies XB1 Enabling a New Realm of CubeSat Science. George Stafford BCT Range St, Suite 200 Boulder, CO 80301
 Blue Canyon Technologies XB1 Enabling a New Realm of CubeSat Science George Stafford BCT 720.458.0703 1600 Range St, Suite 200 Boulder, CO 80301 About BCT Blue Canyon Technologies is a small business founded
Blue Canyon Technologies XB1 Enabling a New Realm of CubeSat Science George Stafford BCT 720.458.0703 1600 Range St, Suite 200 Boulder, CO 80301 About BCT Blue Canyon Technologies is a small business founded
Responsive Flight Software Development & Verification Techniques for Small Satellites
 Responsive Flight Software Development & Verification Techniques for Small Satellites Darren Rowen The Aerospace Corporation Vehicle Systems Division 9 November 2012 The Aerospace Corporation 2012 Overview
Responsive Flight Software Development & Verification Techniques for Small Satellites Darren Rowen The Aerospace Corporation Vehicle Systems Division 9 November 2012 The Aerospace Corporation 2012 Overview
OCSD-A / AeroCube-7A Status Update
 OCSD-A / AeroCube-7A Status Update Darren Rowen Richard Dolphus Patrick Doyle Addison Faler April 20, 2016 2016 The Aerospace Corporation Agenda Concept of Operations Overview Spacecraft Configuration
OCSD-A / AeroCube-7A Status Update Darren Rowen Richard Dolphus Patrick Doyle Addison Faler April 20, 2016 2016 The Aerospace Corporation Agenda Concept of Operations Overview Spacecraft Configuration
Prox-1 Guidance, Navigation, & Control Overview: Development, Algorithms, and Integrated Simulation
 Prox-1 Guidance, Navigation, & Control Overview: Development, Algorithms, and Integrated Simulation Peter Z. Schulte Advisor: Prof. David A. Spencer AE 8900: Special Problems Fall 2014 Georgia Institute
Prox-1 Guidance, Navigation, & Control Overview: Development, Algorithms, and Integrated Simulation Peter Z. Schulte Advisor: Prof. David A. Spencer AE 8900: Special Problems Fall 2014 Georgia Institute
Zero Robotics Autonomous Space Capture Challenge Manual
 Zero Robotics Autonomous Space Capture Challenge Manual v1.3 1 Introduction 1.1 Conventions Vectors All vectors in this document are denoted with a bold face font. Of special note is the position vector
Zero Robotics Autonomous Space Capture Challenge Manual v1.3 1 Introduction 1.1 Conventions Vectors All vectors in this document are denoted with a bold face font. Of special note is the position vector
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
On-Orbit Calibration of Photodiodes for Attitude Determination
 On-Orbit Calibration of Photodiodes for Attitude Determination John C. Springmann University of Michigan, Ann Arbor, MI Adviser: James W. Cutler August 14, 2013 AIAA/USU Small Satellite Conference Photodiode
On-Orbit Calibration of Photodiodes for Attitude Determination John C. Springmann University of Michigan, Ann Arbor, MI Adviser: James W. Cutler August 14, 2013 AIAA/USU Small Satellite Conference Photodiode
Attitude Control for Small Satellites using Control Moment Gyros
 Attitude Control for Small Satellites using Control Moment Gyros V Lappas a, Dr WH Steyn b, Dr CI Underwood c a Graduate Student, University of Surrey, Guildford, Surrey GU 5XH, UK b Professor, University
Attitude Control for Small Satellites using Control Moment Gyros V Lappas a, Dr WH Steyn b, Dr CI Underwood c a Graduate Student, University of Surrey, Guildford, Surrey GU 5XH, UK b Professor, University
Smartphone Video Guidance Sensor for Small Satellites
 SSC13-I-7 Smartphone Video Guidance Sensor for Small Satellites Christopher Becker, Richard Howard, John Rakoczy NASA Marshall Space Flight Center Mail Stop EV42, Huntsville, AL 35812; 256-544-0114 christophermbecker@nasagov
SSC13-I-7 Smartphone Video Guidance Sensor for Small Satellites Christopher Becker, Richard Howard, John Rakoczy NASA Marshall Space Flight Center Mail Stop EV42, Huntsville, AL 35812; 256-544-0114 christophermbecker@nasagov
Mission Overview Cal Poly s Design Current and future work
 Click to edit Master title style Table Click of to Contents edit Master title style Mission Overview Cal Poly s Design Current and future work 2 Mission Click to Overview edit Master title style Main Mission:
Click to edit Master title style Table Click of to Contents edit Master title style Mission Overview Cal Poly s Design Current and future work 2 Mission Click to Overview edit Master title style Main Mission:
Mathematics in Orbit
 Mathematics in Orbit Dan Kalman American University Slides and refs at www.dankalman.net Outline Basics: 3D geospacial models Keyhole Problem: Related Rates! GPS: space-time triangulation Sensor Diagnosis:
Mathematics in Orbit Dan Kalman American University Slides and refs at www.dankalman.net Outline Basics: 3D geospacial models Keyhole Problem: Related Rates! GPS: space-time triangulation Sensor Diagnosis:
Example of Technology Development Program
 Example of Technology Development Program SSTDM 2014 IISC, Bangalore, India April 1, 2014 Dr. Marco Villa CANEUS Small Satellites Director Tyvak VP Space Vehicle Systems Ground rules Power and Volume are
Example of Technology Development Program SSTDM 2014 IISC, Bangalore, India April 1, 2014 Dr. Marco Villa CANEUS Small Satellites Director Tyvak VP Space Vehicle Systems Ground rules Power and Volume are
GPS IIF yaw attitude control during eclipse season
 GPS IIF yaw attitude control during eclipse season F. Dilssner, T. Springer, W. Enderle European Space Operations Centre (ESOC), Darmstadt, Germany AGU Fall Meeting, San Francisco Dec 9, 2011 GPS IIF yaw
GPS IIF yaw attitude control during eclipse season F. Dilssner, T. Springer, W. Enderle European Space Operations Centre (ESOC), Darmstadt, Germany AGU Fall Meeting, San Francisco Dec 9, 2011 GPS IIF yaw
COMPUTER GRAPHICS - MIDTERM 1
 COMPUTER GRAPHICS - MIDTERM 1 Instructions: Answer 4 of the 5 questions below. The total points for each question is specied. Answer only one of the questions 3,4. Write your name and email below. 1 (1)
COMPUTER GRAPHICS - MIDTERM 1 Instructions: Answer 4 of the 5 questions below. The total points for each question is specied. Answer only one of the questions 3,4. Write your name and email below. 1 (1)
3D Transformations. CS 4620 Lecture 10. Cornell CS4620 Fall 2014 Lecture Steve Marschner (with previous instructors James/Bala)
") 3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
Satellite Attitude Determination
 Satellite Attitude Determination AERO4701 Space Engineering 3 Week 5 Last Week Looked at GPS signals and pseudorange error terms Looked at GPS positioning from pseudorange data Looked at GPS error sources,
Satellite Attitude Determination AERO4701 Space Engineering 3 Week 5 Last Week Looked at GPS signals and pseudorange error terms Looked at GPS positioning from pseudorange data Looked at GPS error sources,
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Analysis of Euler Angles in a Simple Two-Axis Gimbals Set
 Vol:5, No:9, 2 Analysis of Euler Angles in a Simple Two-Axis Gimbals Set Ma Myint Myint Aye International Science Index, Mechanical and Mechatronics Engineering Vol:5, No:9, 2 waset.org/publication/358
Vol:5, No:9, 2 Analysis of Euler Angles in a Simple Two-Axis Gimbals Set Ma Myint Myint Aye International Science Index, Mechanical and Mechatronics Engineering Vol:5, No:9, 2 waset.org/publication/358
INITIAL SPHERES OPERATIONS ABOARD THE INTERNATIONAL SPACE STATION
 INITIAL SPHERES OPERATIONS ABOARD THE INTERNATIONAL SPACE STATION Alvar Saenz-Otero, David W. Miller MIT Space Systems Laboratory Cambridge, MA, 02139 USA +1 617 324 6827, alvarso@mit.edu ABSTRACT The
INITIAL SPHERES OPERATIONS ABOARD THE INTERNATIONAL SPACE STATION Alvar Saenz-Otero, David W. Miller MIT Space Systems Laboratory Cambridge, MA, 02139 USA +1 617 324 6827, alvarso@mit.edu ABSTRACT The
Master s Thesis: Real-Time Object Shape Perception via Force/Torque Sensor
 S. Rau TAMS-Oberseminar 1 / 25 MIN-Fakultät Fachbereich Informatik Master s Thesis: Real-Time Object Shape Perception via Force/Torque Sensor Current Status Stephan Rau Universität Hamburg Fakultät für
S. Rau TAMS-Oberseminar 1 / 25 MIN-Fakultät Fachbereich Informatik Master s Thesis: Real-Time Object Shape Perception via Force/Torque Sensor Current Status Stephan Rau Universität Hamburg Fakultät für
Gyroscopic Stabilization of Unstable Dynamical Systems
 Gyroscopic Stabilization of Unstable Dynamical Systems Peter Jorgensen Under the direction of Donghoon Kim and Dr. John E. Hurtado Land, Air, and Space Robotics Laboratory Texas A&M University, College
Gyroscopic Stabilization of Unstable Dynamical Systems Peter Jorgensen Under the direction of Donghoon Kim and Dr. John E. Hurtado Land, Air, and Space Robotics Laboratory Texas A&M University, College
DYNAMICS OF SPACE ROBOTIC ARM DURING INTERACTIONS WITH NON COOPERATIVE OBJECTS
 DYNAMICS OF SPACE ROBOTIC ARM DURING INTERACTIONS WITH NON COOPERATIVE OBJECTS Karol Seweryn 1, Marek Banaszkiewicz 1, Bernd Maediger 2, Tomasz Rybus 1, Josef Sommer 2 1 Space Research Centre of the Polish
DYNAMICS OF SPACE ROBOTIC ARM DURING INTERACTIONS WITH NON COOPERATIVE OBJECTS Karol Seweryn 1, Marek Banaszkiewicz 1, Bernd Maediger 2, Tomasz Rybus 1, Josef Sommer 2 1 Space Research Centre of the Polish
Introduction to quaternions. Mathematics. Operations
 Introduction to quaternions Topics: Definition Mathematics Operations Euler Angles (optional) intro to quaternions 1 noel.h.hughes@gmail.com Euler's Theorem y y Angle! rotation follows right hand rule
Introduction to quaternions Topics: Definition Mathematics Operations Euler Angles (optional) intro to quaternions 1 noel.h.hughes@gmail.com Euler's Theorem y y Angle! rotation follows right hand rule
Transformations Week 9, Lecture 18
 CS 536 Computer Graphics Transformations Week 9, Lecture 18 2D Transformations David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 3 2D Affine Transformations
CS 536 Computer Graphics Transformations Week 9, Lecture 18 2D Transformations David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 3 2D Affine Transformations
PROCEEDINGS OF SPIE. Kiarash Tajdaran, Larry D. Dewell, Eric V. Eason, Raymond M. Bell, Kuo-Chia Liu, et al.
 PROCEEDINGS OF SPIE SPIEDigitalLibrary.org/conference-proceedings-of-spie Telescope line-of-sight slew control and agility with non-contact vibration isolation for the large ultraviolet/ optical/infrared
PROCEEDINGS OF SPIE SPIEDigitalLibrary.org/conference-proceedings-of-spie Telescope line-of-sight slew control and agility with non-contact vibration isolation for the large ultraviolet/ optical/infrared
Camera Drones Lecture 2 Control and Sensors
 Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
3D Transformations World Window to Viewport Transformation Week 2, Lecture 4
 CS 430/536 Computer Graphics I 3D Transformations World Window to Viewport Transformation Week 2, Lecture 4 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory
CS 430/536 Computer Graphics I 3D Transformations World Window to Viewport Transformation Week 2, Lecture 4 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory
NAVAL POSTGRADUATE SCHOOL THESIS
 NAVAL POSTGRADUATE SCHOOL MONTEREY, CALIFORNIA THESIS DEVELOPMENT OF A HARDWARE-IN-THE-LOOP SIMULATOR FOR CONTROL MOMENT GYROSCOPE- BASED ATTITUDE CONTROL SYSTEMS by Brian C. Fields December 2015 Thesis
NAVAL POSTGRADUATE SCHOOL MONTEREY, CALIFORNIA THESIS DEVELOPMENT OF A HARDWARE-IN-THE-LOOP SIMULATOR FOR CONTROL MOMENT GYROSCOPE- BASED ATTITUDE CONTROL SYSTEMS by Brian C. Fields December 2015 Thesis
Paper SSC03-XI-6. Autonomous Telemetry Collection for Single-Processor Small Satellites
 Paper SSC03-XI-6 Autonomous Telemetry Collection for Single-Processor Small Satellites Dave Speer Northrop Grumman Electronic Systems Space Technology & Services 4276 Forbes Blvd. Lanham, MD 20706 On site
Paper SSC03-XI-6 Autonomous Telemetry Collection for Single-Processor Small Satellites Dave Speer Northrop Grumman Electronic Systems Space Technology & Services 4276 Forbes Blvd. Lanham, MD 20706 On site
SSC99-IIA-5 Microcosm Inc., 1999
 SSC99-IIA-5 Microcosm Inc., 1999 AttSim, Attitude Simulation with Control Software in the Loop Hans J., Gwynne Gurevich Microcosm, Inc. 2377 Crenshaw Blvd, Suite 35, Torrance, CA 951 Tel: (31) 32-555 E-mail:
SSC99-IIA-5 Microcosm Inc., 1999 AttSim, Attitude Simulation with Control Software in the Loop Hans J., Gwynne Gurevich Microcosm, Inc. 2377 Crenshaw Blvd, Suite 35, Torrance, CA 951 Tel: (31) 32-555 E-mail:
Multi-robots Cooperative Assembly Planning of Large Space Truss Structures
 Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 116 Multi-robots Cooperative Assembly Planning of Large Space Truss
Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 116 Multi-robots Cooperative Assembly Planning of Large Space Truss
Fast Star Tracker Centroid Algorithm for High Performance CubeSat with Air Bearing Validation. Matthew Knutson, David Miller. June 2012 SSL # 5-12
 Fast Star Tracker Centroid Algorithm for High Performance CubeSat with Air Bearing Validation Matthew Knutson, David Miller June 2012 SSL # 5-12 Fast Star Tracker Centroid Algorithm for High Performance
Fast Star Tracker Centroid Algorithm for High Performance CubeSat with Air Bearing Validation Matthew Knutson, David Miller June 2012 SSL # 5-12 Fast Star Tracker Centroid Algorithm for High Performance
Log1 Contest Round 2 Theta Circles, Parabolas and Polygons. 4 points each
 Name: Units do not have to be included. 016 017 Log1 Contest Round Theta Circles, Parabolas and Polygons 4 points each 1 Find the value of x given that 8 x 30 Find the area of a triangle given that it
Name: Units do not have to be included. 016 017 Log1 Contest Round Theta Circles, Parabolas and Polygons 4 points each 1 Find the value of x given that 8 x 30 Find the area of a triangle given that it
MOBILE ROBOTIC SYSTEM FOR GROUND-TESTING OF MULTI-SPACECRAFT PROXIMITY OPERATIONS
 MOBILE ROBOTIC SYSTEM FOR GROUND-TESTING OF MULTI-SPACECRAFT PROXIMITY OPERATIONS INTRODUCTION James Doebbler, Jeremy Davis, John Valasek, John Junkins Texas A&M University, College Station, TX 77843 Ground
MOBILE ROBOTIC SYSTEM FOR GROUND-TESTING OF MULTI-SPACECRAFT PROXIMITY OPERATIONS INTRODUCTION James Doebbler, Jeremy Davis, John Valasek, John Junkins Texas A&M University, College Station, TX 77843 Ground
Navigational Aids 1 st Semester/2007/TF 7:30 PM -9:00 PM
 Glossary of Navigation Terms accelerometer. A device that senses inertial reaction to measure linear or angular acceleration. In its simplest form, it consists of a case-mounted spring and mass arrangement
Glossary of Navigation Terms accelerometer. A device that senses inertial reaction to measure linear or angular acceleration. In its simplest form, it consists of a case-mounted spring and mass arrangement
Geometric Correction
 CEE 6150: Digital Image Processing Geometric Correction 1 Sources of Distortion Sensor Characteristics optical distortion aspect ratio non-linear mirror velocity detector geometry & scanning sequence Viewing
CEE 6150: Digital Image Processing Geometric Correction 1 Sources of Distortion Sensor Characteristics optical distortion aspect ratio non-linear mirror velocity detector geometry & scanning sequence Viewing
Coordinate Transformations in Advanced Calculus
 Coordinate Transformations in Advanced Calculus by Sacha Nandlall T.A. for MATH 264, McGill University Email: sacha.nandlall@mail.mcgill.ca Website: http://www.resanova.com/teaching/calculus/ Fall 2006,
Coordinate Transformations in Advanced Calculus by Sacha Nandlall T.A. for MATH 264, McGill University Email: sacha.nandlall@mail.mcgill.ca Website: http://www.resanova.com/teaching/calculus/ Fall 2006,
HARDWARE-IN-THE-LOOP SIMULATION FOR VERIFICATION OF CUBESAT ATTITUDE DETERMINATION AND CONTROL SUBSYSTEMS. A Thesis. presented to
 HARDWARE-IN-THE-LOOP SIMULATION FOR VERIFICATION OF CUBESAT ATTITUDE DETERMINATION AND CONTROL SUBSYSTEMS A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In
HARDWARE-IN-THE-LOOP SIMULATION FOR VERIFICATION OF CUBESAT ATTITUDE DETERMINATION AND CONTROL SUBSYSTEMS A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In
Trajectory planning of 2 DOF planar space robot without attitude controller
 ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 4 (2008) No. 3, pp. 196-204 Trajectory planning of 2 DOF planar space robot without attitude controller Rajkumar Jain, Pushparaj
ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 4 (2008) No. 3, pp. 196-204 Trajectory planning of 2 DOF planar space robot without attitude controller Rajkumar Jain, Pushparaj
Strapdown inertial navigation technology
 Strapdown inertial navigation technology D. H. Titterton and J. L. Weston Peter Peregrinus Ltd. on behalf of the Institution of Electrical Engineers Contents Preface Page xiii 1 Introduction 1 1.1 Navigation
Strapdown inertial navigation technology D. H. Titterton and J. L. Weston Peter Peregrinus Ltd. on behalf of the Institution of Electrical Engineers Contents Preface Page xiii 1 Introduction 1 1.1 Navigation
Rotational3D Efficient modelling of 3D effects in rotational mechanics
 Rotational3D - Efficient Modelling of 3D Effects in Rotational Mechanics Rotational3D Efficient modelling of 3D effects in rotational mechanics Johan Andreasson Magnus Gäfvert Modelon AB Ideon Science
Rotational3D - Efficient Modelling of 3D Effects in Rotational Mechanics Rotational3D Efficient modelling of 3D effects in rotational mechanics Johan Andreasson Magnus Gäfvert Modelon AB Ideon Science
Graphics Systems and Models
 Graphics Systems and Models 2 nd Week, 2007 Sun-Jeong Kim Five major elements Input device Processor Memory Frame buffer Output device Graphics System A Graphics System 2 Input Devices Most graphics systems
Graphics Systems and Models 2 nd Week, 2007 Sun-Jeong Kim Five major elements Input device Processor Memory Frame buffer Output device Graphics System A Graphics System 2 Input Devices Most graphics systems
What Is SimMechanics?
 SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
CPSC / Texture Mapping
 CPSC 599.64 / 601.64 Introduction and Motivation so far: detail through polygons & materials example: brick wall problem: many polygons & materials needed for detailed structures inefficient for memory
CPSC 599.64 / 601.64 Introduction and Motivation so far: detail through polygons & materials example: brick wall problem: many polygons & materials needed for detailed structures inefficient for memory
Development of Formation Flight and Docking Algorithms Using the SPHERES Testbed
 Development of Formation Flight and Docking Algorithms Using the Testbed Prof. David W. Miller MIT Allen Chen, Alvar Saenz-Otero, Mark Hilstad, David W. Miller Introduction : Synchronized Position Hold
Development of Formation Flight and Docking Algorithms Using the Testbed Prof. David W. Miller MIT Allen Chen, Alvar Saenz-Otero, Mark Hilstad, David W. Miller Introduction : Synchronized Position Hold
points are stationed arbitrarily close to one corner of the square ( n+1
 1 Intro We ve seen previously that we can construct networks based on the regular triangular, rectangular and hexagonal lattices where the total network length is linear in n and the R-statistic for the
1 Intro We ve seen previously that we can construct networks based on the regular triangular, rectangular and hexagonal lattices where the total network length is linear in n and the R-statistic for the
SSC99-XI-8. GyroWheel TM - An Innovative New Actuator/Sensor for 3-axis Spacecraft Attitude Control
 SSC99-XI-8 GyroWheel TM - An Innovative New Actuator/Sensor for 3-axis Spacecraft Attitude Control George Tyc Bristol Aerospace Limited Winnipeg, Manitoba R3C 2S4 tel: (204) 775-8331 x3367 email: gtyc@bristol.ca
SSC99-XI-8 GyroWheel TM - An Innovative New Actuator/Sensor for 3-axis Spacecraft Attitude Control George Tyc Bristol Aerospace Limited Winnipeg, Manitoba R3C 2S4 tel: (204) 775-8331 x3367 email: gtyc@bristol.ca
DEVELOPMENT OF CAMERA MODEL AND GEOMETRIC CALIBRATION/VALIDATION OF XSAT IRIS IMAGERY
 DEVELOPMENT OF CAMERA MODEL AND GEOMETRIC CALIBRATION/VALIDATION OF XSAT IRIS IMAGERY Leong Keong Kwoh, Xiaojing Huang, Wee Juan Tan Centre for Remote, Imaging Sensing and Processing (CRISP), National
DEVELOPMENT OF CAMERA MODEL AND GEOMETRIC CALIBRATION/VALIDATION OF XSAT IRIS IMAGERY Leong Keong Kwoh, Xiaojing Huang, Wee Juan Tan Centre for Remote, Imaging Sensing and Processing (CRISP), National
Nadir Attitude Pointing Control Using Genetic Algorithm For Active Gravity Gradient Stabilised Microsatellite
 Nadir Attitude Pointing Control Using Genetic Algorithm For Active Gravity Gradient Stabilised Microsatellite A.M. SI MOHAMMED, B. SEBA, A. BOUDJEMAI Centre des Techniques Spatiales, Division de Mécanique
Nadir Attitude Pointing Control Using Genetic Algorithm For Active Gravity Gradient Stabilised Microsatellite A.M. SI MOHAMMED, B. SEBA, A. BOUDJEMAI Centre des Techniques Spatiales, Division de Mécanique
Rectification Algorithm for Linear Pushbroom Image of UAV
 Rectification Algorithm for Linear Pushbroom Image of UAV Ruoming SHI and Ling ZHU INTRODUCTION In recent years, unmanned aerial vehicle (UAV) has become a strong supplement and an important complement
Rectification Algorithm for Linear Pushbroom Image of UAV Ruoming SHI and Ling ZHU INTRODUCTION In recent years, unmanned aerial vehicle (UAV) has become a strong supplement and an important complement
Kinematic Synthesis. October 6, 2015 Mark Plecnik
 Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
A Dynamic, Hardware-in-the-Loop, Three-Axis Simulator of Spacecraft Attitude Maneuvering with Nanosatellite Dimensions
 Simone, C., et al. (2015): JoSS, Vol. 4, No. 1, pp. 315 328 (Peer-reviewed Article available at www.jossonline.com) www.deepakpublishing.com www. JoSSonline.com A Dynamic, Hardware-in-the-Loop, Three-Axis
Simone, C., et al. (2015): JoSS, Vol. 4, No. 1, pp. 315 328 (Peer-reviewed Article available at www.jossonline.com) www.deepakpublishing.com www. JoSSonline.com A Dynamic, Hardware-in-the-Loop, Three-Axis
Today we will be exploring three-dimensional objects, those that possess length, width, and depth.
 Lesson 22 Lesson 22, page 1 of 13 Glencoe Geometry Chapter 11.1 3-D figures & Polyhedra Today we will be exploring three-dimensional objects, those that possess length, width, and depth. In Euclidean,
Lesson 22 Lesson 22, page 1 of 13 Glencoe Geometry Chapter 11.1 3-D figures & Polyhedra Today we will be exploring three-dimensional objects, those that possess length, width, and depth. In Euclidean,
Boeing s CubeSat TestBed 1 Attitude Determination Design and On Orbit Experience. Michael Taraba Primary Author, Former Employee of the Boeing Company
 SSC9 X 6 Boeing s CubeSat TestBed 1 Attitude Determination Design and On Orbit Experience Michael Taraba Primary Author, Former Employee of the Boeing Company Christian ; Senior Embedded Software Engineer
SSC9 X 6 Boeing s CubeSat TestBed 1 Attitude Determination Design and On Orbit Experience Michael Taraba Primary Author, Former Employee of the Boeing Company Christian ; Senior Embedded Software Engineer
Homework for Section 5.1
 Homework for Section 5.1 1. reate the rotation R(T) 2. reate the reflection F(T) of the triangle T shown below 90 degrees of the triangle T shown below across clockwise about the center point of rotation.
Homework for Section 5.1 1. reate the rotation R(T) 2. reate the reflection F(T) of the triangle T shown below 90 degrees of the triangle T shown below across clockwise about the center point of rotation.
Physical Simulation Experiment System of Multi-Rigid-Body Spacecraft Attitude Control Based on Micro-Gravity Floating Platform Environment
 Joint International Mechanical, Electronic and Information Technology Conference (JIMET 215) Physical Simulation Experiment System of Multi-Rigid-Body Spacecraft Attitude Control Based on Micro-Gravity
Joint International Mechanical, Electronic and Information Technology Conference (JIMET 215) Physical Simulation Experiment System of Multi-Rigid-Body Spacecraft Attitude Control Based on Micro-Gravity
Spacecraft Actuation Using CMGs and VSCMGs
 Spacecraft Actuation Using CMGs and VSCMGs Arjun Narayanan and Ravi N Banavar (ravi.banavar@gmail.com) 1 1 Systems and Control Engineering, IIT Bombay, India Research Symposium, ISRO-IISc Space Technology
Spacecraft Actuation Using CMGs and VSCMGs Arjun Narayanan and Ravi N Banavar (ravi.banavar@gmail.com) 1 1 Systems and Control Engineering, IIT Bombay, India Research Symposium, ISRO-IISc Space Technology
Distributed Consensus in Multivehicle Cooperative Control: Theory and Applications
 Distributed Consensus in Multivehicle Cooperative Control: Theory and Applications Wei Ren and Randal W. Beard Springer ISBN: 978-1-84800-014-8 Tutorial Slides Prepared by Wei Ren Department of Electrical
Distributed Consensus in Multivehicle Cooperative Control: Theory and Applications Wei Ren and Randal W. Beard Springer ISBN: 978-1-84800-014-8 Tutorial Slides Prepared by Wei Ren Department of Electrical
SHAPE AND STRUCTURE. Shape and Structure. An explanation of Mathematical terminology
 Shape and Structure An explanation of Mathematical terminology 2005 1 POINT A dot Dots join to make lines LINE A line is 1 dimensional (length) A line is a series of points touching each other and extending
Shape and Structure An explanation of Mathematical terminology 2005 1 POINT A dot Dots join to make lines LINE A line is 1 dimensional (length) A line is a series of points touching each other and extending
S P. Geometry Final Exam Review. Name R S P Q P S. Chapter 7 1. If you reflect the point (2, -6) in the x-axis, the coordinates of the image would be:
 in the x-axis, the coordinates of the image would be:") Geometry Final Exam Review Chapter 7 1. If you reflect the point (2, -6) in the x-axis, the coordinates of the image would be: Name 6. Use the graph below to complete the sentence. 2. If you reflect the
Geometry Final Exam Review Chapter 7 1. If you reflect the point (2, -6) in the x-axis, the coordinates of the image would be: Name 6. Use the graph below to complete the sentence. 2. If you reflect the
Chapter 4. Clustering Core Atoms by Location
 Chapter 4. Clustering Core Atoms by Location In this chapter, a process for sampling core atoms in space is developed, so that the analytic techniques in section 3C can be applied to local collections
Chapter 4. Clustering Core Atoms by Location In this chapter, a process for sampling core atoms in space is developed, so that the analytic techniques in section 3C can be applied to local collections
Multi-Objective Optimization of a Boomerang Shape using modefrontier and STAR-CCM+
 Multi-Objective Optimization of a Boomerang Shape using modefrontier and STAR-CCM+ Alberto Clarich*, Rosario Russo ESTECO, Trieste, (Italy) Enrico Nobile, Carlo Poloni University of Trieste (Italy) Summary
Multi-Objective Optimization of a Boomerang Shape using modefrontier and STAR-CCM+ Alberto Clarich*, Rosario Russo ESTECO, Trieste, (Italy) Enrico Nobile, Carlo Poloni University of Trieste (Italy) Summary
Lecture: Autonomous micro aerial vehicles
 Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
CubeSat Flight Control Software
 CubeSat Flight Control Software Senior Project - 2013 Dan Turner Colin Myers Project Description Flight Control Software for Vermont Techs CubeSat Scheduled to launch in September of 2013 Purpose: Test
CubeSat Flight Control Software Senior Project - 2013 Dan Turner Colin Myers Project Description Flight Control Software for Vermont Techs CubeSat Scheduled to launch in September of 2013 Purpose: Test
Strapdown Inertial Navigation Technology
 Strapdown Inertial Navigation Technology 2nd Edition David Titterton and John Weston The Institution of Engineering and Technology Preface xv 1 Introduction 1 1.1 Navigation 1 1.2 Inertial navigation 2
Strapdown Inertial Navigation Technology 2nd Edition David Titterton and John Weston The Institution of Engineering and Technology Preface xv 1 Introduction 1 1.1 Navigation 1 1.2 Inertial navigation 2
Hierarchical Modeling. University of Texas at Austin CS384G - Computer Graphics Fall 2010 Don Fussell
 Hierarchical Modeling University of Texas at Austin CS384G - Computer Graphics Fall 2010 Don Fussell Reading Angel, sections 9.1-9.6 [reader pp. 169-185] OpenGL Programming Guide, chapter 3 Focus especially
Hierarchical Modeling University of Texas at Austin CS384G - Computer Graphics Fall 2010 Don Fussell Reading Angel, sections 9.1-9.6 [reader pp. 169-185] OpenGL Programming Guide, chapter 3 Focus especially
Name: 1) Which of the following properties of an object are not preserved under a rotation? A) orientation B) none of these C) shape D) size
 Which of the following properties of an object are not preserved under a rotation? A) orientation B) none of these C) shape D) size") Name: 1) Which of the following properties of an object are not preserved under a rotation? A) orientation B) none of these C) shape D) size 2) Under a certain transformation, A B C is the image of ABC.
Name: 1) Which of the following properties of an object are not preserved under a rotation? A) orientation B) none of these C) shape D) size 2) Under a certain transformation, A B C is the image of ABC.
CelestLabX: CelestLab s extension module
 ScilabTEC CelestLabX: CelestLab s extension module Alain Lamy, CNES Alain.Lamy@cnes.fr 16 May 2014 Space Flight Dynamics mission design at CNES Agenda What tools for mission design? -> What makes Scilab
ScilabTEC CelestLabX: CelestLab s extension module Alain Lamy, CNES Alain.Lamy@cnes.fr 16 May 2014 Space Flight Dynamics mission design at CNES Agenda What tools for mission design? -> What makes Scilab
EE 570: Location and Navigation: Theory & Practice
 EE 570: Location and Navigation: Theory & Practice Navigation Mathematics Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 1 of 14 Coordinate Frames - ECI The Earth-Centered
EE 570: Location and Navigation: Theory & Practice Navigation Mathematics Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 1 of 14 Coordinate Frames - ECI The Earth-Centered
Improving Vision-Based Distance Measurements using Reference Objects
 Improving Vision-Based Distance Measurements using Reference Objects Matthias Jüngel, Heinrich Mellmann, and Michael Spranger Humboldt-Universität zu Berlin, Künstliche Intelligenz Unter den Linden 6,
Improving Vision-Based Distance Measurements using Reference Objects Matthias Jüngel, Heinrich Mellmann, and Michael Spranger Humboldt-Universität zu Berlin, Künstliche Intelligenz Unter den Linden 6,
JEM Internal Ball Camera (Int-Ball)
") JEM Internal Ball Camera (Int-Ball) July 14, 2017 Japan Aerospace Exploration Agency 1 Objective of Project Currently, when working in the Japanese Experiment Module ( Kibo ), the crew (astronaut) often
JEM Internal Ball Camera (Int-Ball) July 14, 2017 Japan Aerospace Exploration Agency 1 Objective of Project Currently, when working in the Japanese Experiment Module ( Kibo ), the crew (astronaut) often
Unit 2: Locomotion Kinematics of Wheeled Robots: Part 3
 Unit 2: Locomotion Kinematics of Wheeled Robots: Part 3 Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 28, 2014 COMP 4766/6778 (MUN) Kinematics of
Unit 2: Locomotion Kinematics of Wheeled Robots: Part 3 Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 28, 2014 COMP 4766/6778 (MUN) Kinematics of
ASTRIUM Space Transportation
 SIMU-LANDER Hazard avoidance & advanced GNC for interplanetary descent and soft-landing S. Reynaud, E. Ferreira, S. Trinh, T. Jean-marius 3rd International Workshop on Astrodynamics Tools and Techniques
SIMU-LANDER Hazard avoidance & advanced GNC for interplanetary descent and soft-landing S. Reynaud, E. Ferreira, S. Trinh, T. Jean-marius 3rd International Workshop on Astrodynamics Tools and Techniques
Digital Geometry Processing Parameterization I
 Problem Definition Given a surface (mesh) S in R 3 and a domain find a bective F: S Typical Domains Cutting to a Disk disk = genus zero + boundary sphere = closed genus zero Creates artificial boundary
Problem Definition Given a surface (mesh) S in R 3 and a domain find a bective F: S Typical Domains Cutting to a Disk disk = genus zero + boundary sphere = closed genus zero Creates artificial boundary
Synthesis of Spatial RPRP Loops for a Given Screw System
 Synthesis of Spatial RPRP Loops for a Given Screw System A. Perez-Gracia Institut de Robotica i Informatica Industrial (IRI) UPC/CSIC, Barcelona, Spain and: College of Engineering, Idaho State Univesity,
Synthesis of Spatial RPRP Loops for a Given Screw System A. Perez-Gracia Institut de Robotica i Informatica Industrial (IRI) UPC/CSIC, Barcelona, Spain and: College of Engineering, Idaho State Univesity,
Development of a Programmable Rotational Motion Laboratory Demonstrator
 Development of a Programmable Rotational Motion Laboratory Demonstrator Stephen P. Russell and Stephen M. Rock Stanford University, Stanford, CA, 94305 This paper presents a novel testbed capable of rotating
Development of a Programmable Rotational Motion Laboratory Demonstrator Stephen P. Russell and Stephen M. Rock Stanford University, Stanford, CA, 94305 This paper presents a novel testbed capable of rotating
Spring 2016 Final Exam
 16 311 Spring 2016 Final Exam Name Group Number Read all of the following information before starting the exam: You have 2hr and 0 minutes to complete this exam. When drawing paths, be sure to clearly
16 311 Spring 2016 Final Exam Name Group Number Read all of the following information before starting the exam: You have 2hr and 0 minutes to complete this exam. When drawing paths, be sure to clearly
PROPERTIES AND CONSTRUCTION OF ICOSAHEDRA
 PROPERTIES AND CONSTRUCTION OF ICOSAHEDRA The icosahedron is the most complicated of the five regular platonic solids. It consists of twenty equilateral triangle faces (F=0), a total of twelve vertices
PROPERTIES AND CONSTRUCTION OF ICOSAHEDRA The icosahedron is the most complicated of the five regular platonic solids. It consists of twenty equilateral triangle faces (F=0), a total of twelve vertices
Agile ACMS Software Fast Prototyping for Real-time Validation with Hardware in the Loop
 Agile ACMS Software Fast Prototyping for Real-time Validation with Hardware in the Loop Denis Fertin European Space Technology Centre (ESTEC), European Space Agency, Noordwijk, The Netherlands Abstract
Agile ACMS Software Fast Prototyping for Real-time Validation with Hardware in the Loop Denis Fertin European Space Technology Centre (ESTEC), European Space Agency, Noordwijk, The Netherlands Abstract
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Yandex.Maps API Background theory
 8.02.2018 .. Version 1.0 Document build date: 8.02.2018. This volume is a part of Yandex technical documentation. Yandex helpdesk site: http://help.yandex.ru 2008 2018 Yandex LLC. All rights reserved.
8.02.2018 .. Version 1.0 Document build date: 8.02.2018. This volume is a part of Yandex technical documentation. Yandex helpdesk site: http://help.yandex.ru 2008 2018 Yandex LLC. All rights reserved.
ME/CS 133(a): Final Exam (Fall Quarter 2017/2018)
: Final Exam (Fall Quarter 2017/2018)") ME/CS 133(a): Final Exam (Fall Quarter 2017/2018) Instructions 1. Limit your total time to 5 hours. You can take a break in the middle of the exam if you need to ask a question, or go to dinner, etc. That
ME/CS 133(a): Final Exam (Fall Quarter 2017/2018) Instructions 1. Limit your total time to 5 hours. You can take a break in the middle of the exam if you need to ask a question, or go to dinner, etc. That
Digital CMOS Cameras for Attitude Determination
 SSC-VII- Digital CMOS Cameras for Attitude Determination David Meller meller@aa.washington.edu University of Washington Dept. of Aeronautics & Astronautics Graduate Research Assistant Advisor: Mark Campbell,
SSC-VII- Digital CMOS Cameras for Attitude Determination David Meller meller@aa.washington.edu University of Washington Dept. of Aeronautics & Astronautics Graduate Research Assistant Advisor: Mark Campbell,
Comprehensive Matlab GUI for Determining Barycentric Orbital Trajectories
 Comprehensive Matlab GUI for Determining Barycentric Orbital Trajectories Steve Katzman 1 California Polytechnic State University, San Luis Obispo, CA 93405 When a 3-body gravitational system is modeled
Comprehensive Matlab GUI for Determining Barycentric Orbital Trajectories Steve Katzman 1 California Polytechnic State University, San Luis Obispo, CA 93405 When a 3-body gravitational system is modeled
Math 462: Review questions
 Math 462: Review questions Paul Hacking 4/22/10 (1) What is the angle between two interior diagonals of a cube joining opposite vertices? [Hint: It is probably quickest to use a description of the cube
Math 462: Review questions Paul Hacking 4/22/10 (1) What is the angle between two interior diagonals of a cube joining opposite vertices? [Hint: It is probably quickest to use a description of the cube
1 Transformations. Chapter 1. Transformations. Department of Computer Science and Engineering 1-1
 Transformations 1-1 Transformations are used within the entire viewing pipeline: Projection from world to view coordinate system View modifications: Panning Zooming Rotation 1-2 Transformations can also
Transformations 1-1 Transformations are used within the entire viewing pipeline: Projection from world to view coordinate system View modifications: Panning Zooming Rotation 1-2 Transformations can also
Physics 1C, Summer 2011 (Session 1) Practice Midterm 2 (50+4 points) Solutions
 Practice Midterm 2 (50+4 points) Solutions") Physics 1C, Summer 2011 (Session 1) Practice Midterm 2 (50+4 points) s Problem 1 (5x2 = 10 points) Label the following statements as True or False, with a one- or two-sentence explanation for why you chose
Physics 1C, Summer 2011 (Session 1) Practice Midterm 2 (50+4 points) s Problem 1 (5x2 = 10 points) Label the following statements as True or False, with a one- or two-sentence explanation for why you chose
Shape & Space Part C: Transformations
 Name: Homeroom: Shape & Space Part C: Transformations Student Learning Expectations Outcomes: I can describe and analyze position and motion of objects and shapes by Checking for Understanding identifying
Name: Homeroom: Shape & Space Part C: Transformations Student Learning Expectations Outcomes: I can describe and analyze position and motion of objects and shapes by Checking for Understanding identifying
SUMMARY. CS380: Introduction to Computer Graphics Track-/Arc-ball Chapter 8. Min H. Kim KAIST School of Computing 18/04/06.
 8/4/6 CS38: Introduction to Computer Graphics Track-/Arc-ball Chapter 8 Min H. Kim KAIST School of Computing Quaternion SUMMARY 2 8/4/6 Unit norm quats. == rotations Squared norm is sum of 4 squares. Any
8/4/6 CS38: Introduction to Computer Graphics Track-/Arc-ball Chapter 8 Min H. Kim KAIST School of Computing Quaternion SUMMARY 2 8/4/6 Unit norm quats. == rotations Squared norm is sum of 4 squares. Any
Recursive Bayesian Estimation Applied to Autonomous Vehicles
 Recursive Bayesian Estimation Applied to Autonomous Vehicles Employing a stochastic algorithm on nonlinear dynamics for real-time localization Master s thesis in Complex Adaptive Systems ANNIE WESTERLUND
Recursive Bayesian Estimation Applied to Autonomous Vehicles Employing a stochastic algorithm on nonlinear dynamics for real-time localization Master s thesis in Complex Adaptive Systems ANNIE WESTERLUND
Vectors and the Geometry of Space
 Vectors and the Geometry of Space In Figure 11.43, consider the line L through the point P(x 1, y 1, z 1 ) and parallel to the vector. The vector v is a direction vector for the line L, and a, b, and c
Vectors and the Geometry of Space In Figure 11.43, consider the line L through the point P(x 1, y 1, z 1 ) and parallel to the vector. The vector v is a direction vector for the line L, and a, b, and c
Chapter 4 Dynamics. Part Constrained Kinematics and Dynamics. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Autonomous on-orbit Calibration Of Star Trackers
 Autonomous on-orbit Calibration Of Star Trackers Malak Samaan 1, Todd Griffith 2,Puneet Singla 3, and John L. Junkins 4 Department of Aerospace Engineering, Texas A&M University, College Station, TX 77843-3141
Autonomous on-orbit Calibration Of Star Trackers Malak Samaan 1, Todd Griffith 2,Puneet Singla 3, and John L. Junkins 4 Department of Aerospace Engineering, Texas A&M University, College Station, TX 77843-3141
Implementation of three axis magnetic control mode for PISAT
 Implementation of three axis magnetic control mode for PISAT Shashank Nagesh Bhat, Arjun Haritsa Krishnamurthy Student, PES Institute of Technology, Bangalore Abstract Orientation of a satellite is important
Implementation of three axis magnetic control mode for PISAT Shashank Nagesh Bhat, Arjun Haritsa Krishnamurthy Student, PES Institute of Technology, Bangalore Abstract Orientation of a satellite is important
CRITICAL DESIGN REVIEW
 STUDENTS SPACE ASSOCIATION THE FACULTY OF POWER AND AERONAUTICAL ENGINEERING WARSAW UNIVERSITY OF TECHNOLOGY CRITICAL DESIGN REVIEW November 2016 Issue no. 1 Changes Date Changes Pages/Section Responsible
STUDENTS SPACE ASSOCIATION THE FACULTY OF POWER AND AERONAUTICAL ENGINEERING WARSAW UNIVERSITY OF TECHNOLOGY CRITICAL DESIGN REVIEW November 2016 Issue no. 1 Changes Date Changes Pages/Section Responsible
Orientation & Quaternions
 Orientation & Quaternions Orientation Position and Orientation The position of an object can be represented as a translation of the object from the origin The orientation of an object can be represented
Orientation & Quaternions Orientation Position and Orientation The position of an object can be represented as a translation of the object from the origin The orientation of an object can be represented