Enhancing the RAMSAS method for Systems Reliability Analysis through Modelica
|
|
|
- Ralf Quinn
- 5 years ago
- Views:
Transcription
1 7th MODPROD Workshop on Model-Based Product Development February 05-06, 2013 Linköping University, Sweden Enhancing the RAMSAS method for Systems Reliability Analysis through Modelica Alfredo Garro and Andrea Tundis Systems Engineering and Integration (SEI) Research Group Department of Computer Engineering, Modeling, Electronics, and Systems Science (DIMES) ITALY
2 Outline PART I Introduction to the RAMSAS Method (Alfredo Garro) System Reliability Analysis RAMSAS: A Model-Based method for System Reliability Analysis Exploiting RAMSAS for the Reliability Analysis of an Attitude Determination and Control System (ADCS) live DEMO PART II From RAMSAS to RAMSAS4Modelica (Andrea Tundis) From SysML to ModelicaML & From Simulink to OpenModelica Supporting Model Verification through Modelica Extensions Conclusions and future works 2
3 PART I Introduction to the RAMSAS Method (Alfredo Garro) 3
4 System Dependability and RAMS Analysis Dependability: the collective term used to describe the availability performance and its influencing factors: reliability performance, maintainability performance and maintenance support performance (IEC - International Electrotechnical Commission) RAMS (Reliability, Availability, Maintainability and Safety): the engineering discipline which aims at providing an integrated and methodological approach to deal with system dependability 4
5 System Dependability and RAMS Analysis Quantitative Analysis Qualitative Analysis Suitable for Software Intensive Systems Series-Parallel x - - (RBD) Markov Chains x - - FMEA/FMECA - x x (S-FMEA/S-FMECA) FTA - x x (S-FTA) HAZOP - x x HSIA - x x SCCFA - x x PSH - x x 5








6 Reliability Analysis: from LRUs (Lowest Replaceable Unit) to SoS (System of Systems) System of Systems (SoS) complexity large-scale system system equipment LRU/component 6
7 RAMSAS: A Model-Based method for System Reliability Analysis through Simulation The RAMSAS method is centered on a classical iterative process which consists of four main phases. 7
8 When and where to exploit our method in a typical System Development Process The proposed method is not intended to be an alternative to other RAMS techniques (FMECA, FTA, RDB, etc.) but rather a complement able to provide additional analysis capabilities 8
9 RAMSAS: A Model-Based method for System Reliability Analysis 9
10 Exploiting the RAMSAS method for System Reliability Analysis RAMSAS has been experimented: In the satellite domain for the reliability analysis of an Attitude Determination and Control System [1]; in the avionics domain for the reliability analysis of: a Landing Gear System [4]; a Flight Management System [3]; in the automotive domain for the reliability analysis of an Anti-lock Brake System (ABS) [2]; [1] A. Garro, A. Tundis, J. Groß, and M. Riestenpatt Gen. Richter, Experimenting the RAMSAS method in the reliability analysis of an Attitude Determination and Control System (ADCS), in Proc. of the Int. Workshop on Applied Modeling and Simulation (WAMS), jointly held with the NATO CAX FORUM, Rome, Italy, September [2] A. Garro and A. Tundis, Enhancing the RAMSAS method for System Reliability Analysis: an exploitation in the automotive domain, Proc. of the 2nd Int. Conf. on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH), Rome (Italy), July [3] A. Garro and A. Tundis, A Model-Based method for System Reliability Analysis, Proc. of the Symposium On Theory of Modeling and Simulation (TMS) at SpringSim 2012, Orlando, FL (USA), March [4] A. Garro, A. Tundis, and N. Chirillo, System reliability analysis: a Model-Based approach and a case study in the avionics industry, Proc. of the 3rd Air and Space International Conference (CEAS), Venice (Italy), October
11 The reference experiment: Reliability Analysis of an Attitude Determination and Control System of a Satellite FireSat mission: to detect, analyze and monitor forest fires; The satellite is orbiting the earth at an altitude of ~700 km over ground, which is called a low-earth orbit (LEO); Resulting from its altitude, the satellite has to turn with a constant angular velocity once it is aligned to nadir pointing. 11
12 RAMSAS: The System Modeling phase In the System Modeling phase the structure and both the intended and dysfunctional behavior of the System under consideration are modeled by using a SysML based notation. 12

13 RAMSAS: The System Modeling phase System Structure Modeling In this phase the System is decomposed in component entities by applying in-out zooming mechanisms. Behavior Modeling Structure Modeling 13

14 RAMSAS: The System Modeling phase System Structure Modeling 14


15 RAMSAS: The System Modeling phase System Structure Modeling 15

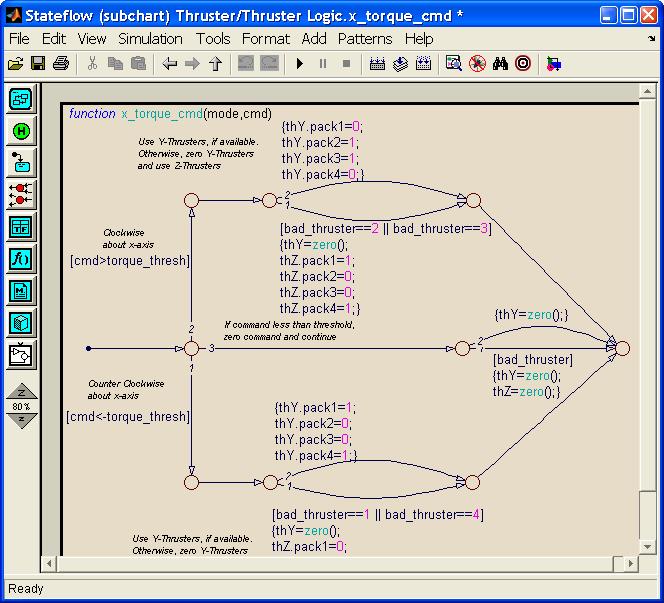
16 RAMSAS: The System Modeling phase Intended Behavior Modeling An example of behavioral modeling: the specification of a task of the ThrustersControl, a key component of the Actuators subsystem of an ADCS: 16

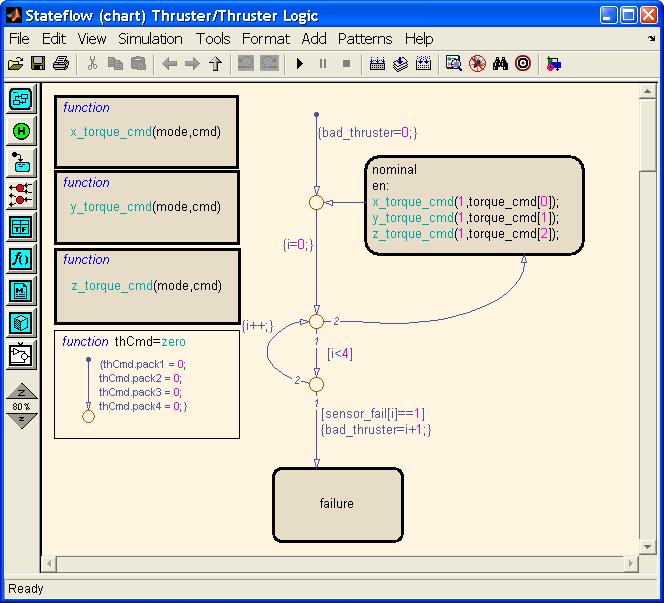
17 RAMSAS: The System Modeling phase Intended Behavior Modeling An example of behavioral modeling: the specification of a task of the ComputeBodyForces, a key component of the Actuators subsystem of an ADCS: 17
18 RAMSAS: The System Modeling phase Intended Behavior Modeling An example of behavioral modeling: the specification of the intended behavior of the Actuators subsystem of an ADCS: 18
19 RAMSAS: The System Modeling phase Intended Behavior Modeling The modeling of the intended behavior can be straightforward if during the system design similar structural and behavioral reference models have been adopted along with a UML based modeling notation 19
 and failures (an observable deviation from the intended behavior at the system boundary)")
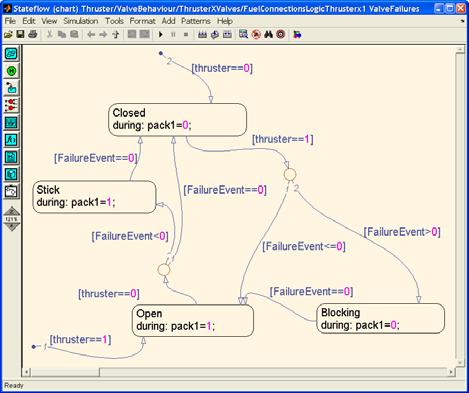
20 RAMSAS: The System Modeling phase Dysfunctional Behavior Modeling In the Dysfunctional Behavior Modeling activity, the focus is on the modeling of faults (a defect in a block) and failures (an observable deviation from the intended behavior at the system boundary) 20
21 RAMSAS: The System Modeling phase Dysfunctional Behavior Modeling A basic dysfunctional pattern is associated to a couple (dysfunctional task type; fault/failure type) Six templates of dysfunctional tasks have been individuated: dtt1. Fault Generation, dtt2. Failure Generation, dtt3. Failure Management, dtt4. Fault Management dtt5. Failure Propagation dtt6. Failure Transformation Five fault/failure types have been individuated: fft1. reaction too late; fft2. reaction too early; fft3. value failure; fft4. commission; fft5. omission. By combining the individuated six dysfunctional task types with these five fault/failure types, thirty different basic SysML-based fault/failure behavioral patterns have been individuated 21

22 RAMSAS: The System Modeling phase Dysfunctional Behavior Modeling An example of dysfuctional behavioral modeling: the specification of the dysfunctional behavior of the FlightSoftware Subsystem of the ADCS: 22
23 RAMSAS: The System Modeling phase Behavior Integration intended behaviors + dysfunctional behaviors an overall behavioral model of the system and its component entities This activity closes the System Modeling phase by delivering the System Model for Reliability Analysis (SMRA) work-product 23

24 RAMSAS: The System Modeling phase Behavior Integration Behavior Integration for the FlighSoftware subsystem 24
25 RAMSAS: The System Simulation phase The objective of the System Simulation phase is to evaluate through simulation the reliability performance of the system and, possibly, compare different design alternatives and parameters settings 25

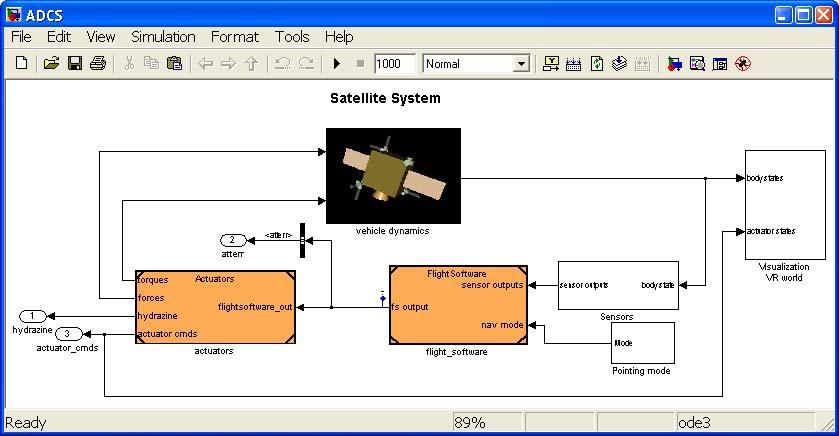
26 RAMSAS: The System Simulation phase 26
27 RAMSAS: a brief live DEMO DEMO 27
28 PART II From RAMSAS to RAMSAS4Modelica (Andrea Tundis) 28

29 Integrating Modeling and Simulation in a Modelica based framework 29

30 System Modeling phase: From SysML to ModelicaML 30
31 RAMSAS: The System Modeling phase Andrea Tundis-PELAB (U. of Linköping) & SEI Research Group (U. of Calabria) 31
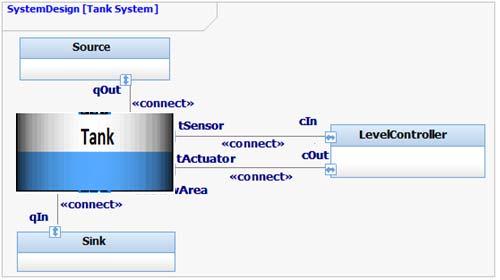
32 System Modeling: From SysML to ModelicaML System Structure Modeling activity Entity From SysML To ModelicaML System/Subsyste m/ Equipment/Compon ent and structural relationships Block, Part Block Definition diagram Internal Block diagram Connection FlowPort, Interface ModelicaClass, ModelicaFunction, ModelicaModel, ModelicaBlock, ModelicaRecord Modelica Class diagram Modelica Internal Class Diagram ModelicaConnector 32

33 Using the Modelica Internal Class Diagram 33
34 RAMSAS: The System Modeling phase 34
35 Modeling: From SysML to ModelicaML Intended Behavior Modeling activity GOAL: to represent physical equation-based systems. From a Task-based behavior to an Equation-based behavior. Equation Diagram; Sequence Diagram to represent interactions among physical components with a different semantic of message passing; Activity Diagram to represent algorithms or actions; Statechart. Entity From SysML To ModelicaML Behavior/Constraint Activity Diagram, Sequence Diagram Parametric Diagram Statechart Activity Diagram, Sequence Diagram, Equation Diagram Statechart 35

36 Using Activity and Statechart diagrams... 36
37 RAMSAS: The System Modeling phase 37
38 Supporting Verification Modeling Lack COTS, libraries or functions for faults and failures analysis Necessary extensions assertion : a system property to validate the Physical Model fulfill : express the relationships between Physical Component and Assertion and among Assertions 38
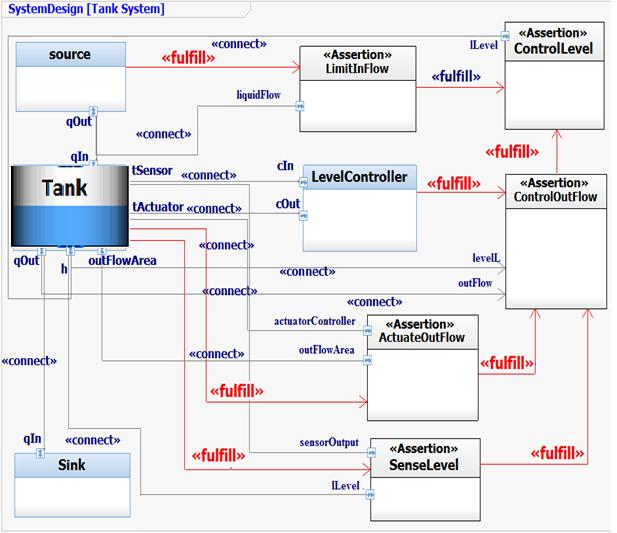
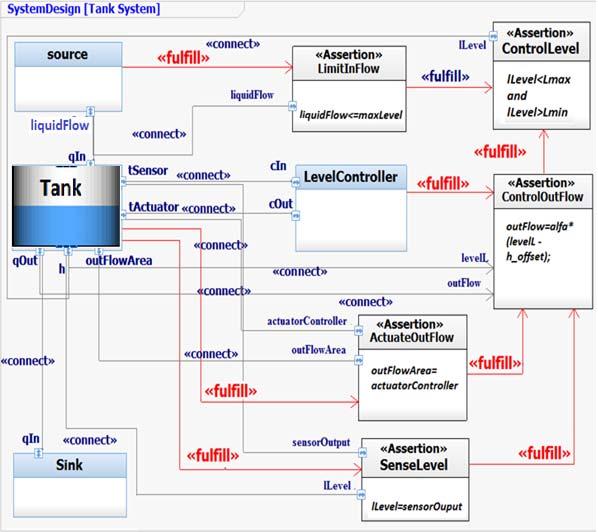
39 Supporting Verification Modeling An example of scenario 39
40 Supporting Verification Modeling Modelica OpenModelica ModelicaML assertion* fulfill* Assertion component Fulfill relationship ModelicaAssertion ModelicaFulfill connect Connect relationship ModelicaConnect *prototype extensions 40
41 System Modeling phase Modeling scenarios activity ModelicaML introduces a new diagram type, called Simulation Diagram, used for simulation modeling. The Simulation Diagram can be used to: to define different scenarios; to set parameters for each scenario and select the variable to be verified; to store simulation experiments and their results. 41
42 Activity System Structure Modeling Matching tables RAMSAS4Modelica System Modeling phase ModelicaML ModelicaClass, ModelicaFunction, ModelicaModel,ModelicaBlock, ModelicaRecord Modelica Class diagram Activity Intended Behavior Modeling ModelicaML Activity Diagram, Sequence Diagram, Statechart Diagram Equation Diagram Modelica Internal Class Diagram Connection ModelicaConnector Activity Dysfunctional Behavioral Modeling & Model checking Validation & Verification ModelicaML ModelicaAssertion* ModelicaFulfill* ModelicaConnect *Extensions Proposal 42
43 Simulation: From Simulink to OpenModelica Andrea Tundis-PELAB (U. of Linköping) & SEI Research Group (U. of Calabria) 43
44 Simulation: From Simulink to OpenModelica System Simulation phase: tools The RAMSAS Method: Simulink: a Commercial block diagram environment for multi-domain simulation and Model-Based Design. The RAMSAS4Modelica method: OpenModelica: It is an Open-Source Modelica-based modeling and simulation environment intended for industrial and academic usage. Its long-term development is supported by a non-profit organization the Open Source Modelica Consortium (OSMC). 44
45 Simulation: From Simulink to OpenModelica System Simulation phase Model Transformation activity Many gaps to transform SysML models into Simulink models Good news!!! Direct transformation from ModelicaML models to OpenModelica No Gaps 45
46 Simulation: From Simulink to OpenModelica System Simulation phase Parameters Setting activity We can set the parameters for each scenario (Simulation diagrams) defined in the System Modeling phase to configure them before simulation. 46
47 Simulation: From Simulink to OpenModelica System Simulation phase Simulation Execution activity The simulation is performed using OpenModelica. The status of the Assertions can be used to determine: Which assertion has/hasn t been satisfied; When an assertion has/hasn t been satisfied; How many times an assertion hasn t been satisfied;.. 47
48 Results Assessment phase Analysis of Results The information about WHEN, WHICH and HOW MANY TIMES... an assertion has/hasn t been satisfied... can be used to generate and evaluate the Reliability/Safety performance of the system (e.g. the Mean Time To Failure) currently by an external tool. 48
49 RAMSAS4Modelica: Conclusions and Contribution: Future perspectives 1. All steps of the method involve the use of a common language: Modelica; 2. The Modeling phase is performed by ModelicaML; 3. The Simulation phase is based on the OpenModelica; 4. The transformation between the design model and the simulation model is direct and without gaps; 5. New concepts, assertion and fulfill, have been introduced for supporting model verification. Ongoing and future works: 6. Implementation of Modelica extensions for model verification and modeling dysfunctional behavior; 7. Enable the Results Assessment phase in OpenModelica. 49
50 Acknowledgments Peter Fritzson, Lena Rogovchenko-Buffoni (PELAB, Linköping University) Johannes Groß, Marius Riestenpatt gen. Richter (Institute for Statics and Dynamics of Aerospace Structures University of Stuttgart) Henry Broodney, Michael Masin (IBM Haifa Research Center) Daniele Gianni (ESA-ESTEC) The Simulation Team ( Gabriele Luceri, Nicola Chirillo (Z-Lab Engineering) 50

51 Thank you! Any Questions? 51
EXPRESSING REQUIREMENTS IN MODELICA
 EXPRESSING REQUIREMENTS IN MODELICA Lena Buffoni and Peter Fritzson Linköping University SE-581 83 Linköping Sweden ABSTRACT As cyber-physical systems grow increasingly complex, the need for methodologies
EXPRESSING REQUIREMENTS IN MODELICA Lena Buffoni and Peter Fritzson Linköping University SE-581 83 Linköping Sweden ABSTRACT As cyber-physical systems grow increasingly complex, the need for methodologies
Towards Unified System Modeling with the ModelicaML UML Profile
 Towards Unified System Modeling with the ModelicaML UML Profile Adrian Pop, David Akhvlediani, Peter Fritzson Programming Environments Lab, Department of Computer and Information Science Linköping University,
Towards Unified System Modeling with the ModelicaML UML Profile Adrian Pop, David Akhvlediani, Peter Fritzson Programming Environments Lab, Department of Computer and Information Science Linköping University,
Fault Tolerance Analysis using OpenModelica with Figaro Extensions for Modelica
 workshop Fault Tolerance Analysis using OpenModelica with Figaro Extensions for Modelica Marc Bouissou ECP, Laboratoire Génie Industriel & EDF R&D, dépt Management des Risques Industriels Lena Buffoni
workshop Fault Tolerance Analysis using OpenModelica with Figaro Extensions for Modelica Marc Bouissou ECP, Laboratoire Génie Industriel & EDF R&D, dépt Management des Risques Industriels Lena Buffoni
Adding Formal Requirements Modeling to SysML
 Adding Formal Requirements Modeling to SysML Mark R. Blackburn www.markblackburn.com Abstract. This paper seeks to raise awareness on the SCR extensions derived from industry use, and discusses how an
Adding Formal Requirements Modeling to SysML Mark R. Blackburn www.markblackburn.com Abstract. This paper seeks to raise awareness on the SCR extensions derived from industry use, and discusses how an
Model-based System Engineering for Fault Tree Generation and Analysis
 Model-based System Engineering for Fault Tree Generation and Analysis Nataliya Yakymets, Hadi Jaber, Agnes Lanusse CEA Saclay Nano-INNOV, Institut CARNOT CEA LIST, DILS, 91 191 Gif sur Yvette CEDEX, Saclay,
Model-based System Engineering for Fault Tree Generation and Analysis Nataliya Yakymets, Hadi Jaber, Agnes Lanusse CEA Saclay Nano-INNOV, Institut CARNOT CEA LIST, DILS, 91 191 Gif sur Yvette CEDEX, Saclay,
Model-Based Dynamic Optimization with OpenModelica and CasADi
 Model-Based Dynamic Optimization with OpenModelica and CasADi Alachew Shitahun PELAB Programming Environment Lab, Dept. Computer Science Linköping University, SE-581 83 Linköping, Sweden Vitalij Ruge Mathematics
Model-Based Dynamic Optimization with OpenModelica and CasADi Alachew Shitahun PELAB Programming Environment Lab, Dept. Computer Science Linköping University, SE-581 83 Linköping, Sweden Vitalij Ruge Mathematics
SySTEMA. SYstem & Safety Tool for Executing Model-based Analyses
 SySTEMA SYstem & Safety Tool for Executing Model-based Analyses Alessio Costantini, Fancesco Inglima, Rodolfo Mazzei, Sergio Di Ponzio System Engineering Local Expertise Center ALTRAN ITALY alessio.costantini@altran.com,
SySTEMA SYstem & Safety Tool for Executing Model-based Analyses Alessio Costantini, Fancesco Inglima, Rodolfo Mazzei, Sergio Di Ponzio System Engineering Local Expertise Center ALTRAN ITALY alessio.costantini@altran.com,
Flight Systems are Cyber-Physical Systems
 Flight Systems are Cyber-Physical Systems Dr. Christopher Landauer Software Systems Analysis Department The Aerospace Corporation Computer Science Division / Software Engineering Subdivision 08 November
Flight Systems are Cyber-Physical Systems Dr. Christopher Landauer Software Systems Analysis Department The Aerospace Corporation Computer Science Division / Software Engineering Subdivision 08 November
Research Article Model-Based Dependability Analysis of Physical Systems with Modelica
 Hindawi Modelling and Simulation in Engineering Volume 2017, Article ID 1578043, 15 pages https://doi.org/10.1155/2017/1578043 Research Article Model-Based Dependability Analysis of Physical Systems with
Hindawi Modelling and Simulation in Engineering Volume 2017, Article ID 1578043, 15 pages https://doi.org/10.1155/2017/1578043 Research Article Model-Based Dependability Analysis of Physical Systems with
Concept and Performance Simulation with ASTOS
 Concept and Performance Simulation with ASTOS Andreas Wiegand (1), Sven Weikert (1) Astos Solutions GmbH (1) Meitnerstraße 8, 70563 Stuttgart, Germany andreas.wiegand@astos.de ABSTRACT Advanced space missions,
Concept and Performance Simulation with ASTOS Andreas Wiegand (1), Sven Weikert (1) Astos Solutions GmbH (1) Meitnerstraße 8, 70563 Stuttgart, Germany andreas.wiegand@astos.de ABSTRACT Advanced space missions,
Ontology Engineering for Product Development
 Ontology Engineering for Product Development Henson Graves Lockheed Martin Aeronautics Company Fort Worth Texas, USA henson.graves@lmco.com Abstract. This analysis is to identify requirements for a Description
Ontology Engineering for Product Development Henson Graves Lockheed Martin Aeronautics Company Fort Worth Texas, USA henson.graves@lmco.com Abstract. This analysis is to identify requirements for a Description
Integration of CAE Tools for Complete System Prototyping EASY5 User Conference May, 2000 Presented by: Joel Tollefson
 Integration of CAE Tools for Complete System Prototyping 2000 User Conference May, 2000 Presented by: Joel Tollefson Presentation Focus Provide a framework to support other presentations define concepts
Integration of CAE Tools for Complete System Prototyping 2000 User Conference May, 2000 Presented by: Joel Tollefson Presentation Focus Provide a framework to support other presentations define concepts
Lecture 5 Safety Analysis FHA, HAZOP
 Lecture 5 Safety Analysis FHA, HAZOP Introduction While designing a safety-critical system usually several safety analysis techniques are applied The idea is to achieve completeness of safety requirements,
Lecture 5 Safety Analysis FHA, HAZOP Introduction While designing a safety-critical system usually several safety analysis techniques are applied The idea is to achieve completeness of safety requirements,
MODPROD'2014 8th International Workshop on Model-Based Product Development
 class x { public int a; class x { float b; public int func (int a,int b); int a; class x { Asa asad float b; public Asda ad int func int a; Asd (int ad a,int cc b); class x { Asa asad float b; Aac sdscfcc
class x { public int a; class x { float b; public int func (int a,int b); int a; class x { Asa asad float b; public Asda ad int func int a; Asd (int ad a,int cc b); class x { Asa asad float b; Aac sdscfcc
Automating Model Composition for Design Verification
 Automating Model Composition for Design Verification Wladimir Schamai (Airbus Group Innovations) Lena Buffoni (Linköping University) Peter Fritzson (Linköping University) Daniel Bouskela (EDF) MODPROD
Automating Model Composition for Design Verification Wladimir Schamai (Airbus Group Innovations) Lena Buffoni (Linköping University) Peter Fritzson (Linköping University) Daniel Bouskela (EDF) MODPROD
Developing Dependable Automotive Embedded Systems using the EAST-ADL
 Developing Dependable Automotive Embedded Systems using the EAST-ADL - Representing continuous time systems in SysML Carl-Johan Sjöstedt, De-Jiu Chen, Martin Törngren, KTH Phillipe Cuenot, Siemens VDO
Developing Dependable Automotive Embedded Systems using the EAST-ADL - Representing continuous time systems in SysML Carl-Johan Sjöstedt, De-Jiu Chen, Martin Törngren, KTH Phillipe Cuenot, Siemens VDO
Execution of UML State Machines Using Modelica
 Execution of UML State Machines Using Modelica Wladimir Schamai 1, Uwe Pohlmann 2, Peter Fritzson 3, Christiaan J.J. Paredis 4, Philipp Helle 1, Carsten Strobel 1 1 EADS Innovation Works, Germany 2 University
Execution of UML State Machines Using Modelica Wladimir Schamai 1, Uwe Pohlmann 2, Peter Fritzson 3, Christiaan J.J. Paredis 4, Philipp Helle 1, Carsten Strobel 1 1 EADS Innovation Works, Germany 2 University
Introduction to Control Systems Design
 Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Safety and Reliability of Embedded Systems. (Sicherheit und Zuverlässigkeit eingebetteter Systeme) Safety and Reliability Analysis Models: Overview
 Safety and Reliability Analysis Models: Overview") (Sicherheit und Zuverlässigkeit eingebetteter Systeme) Safety and Reliability Analysis Models: Overview Content Classification Hazard and Operability Study (HAZOP) Preliminary Hazard Analysis (PHA) Event
(Sicherheit und Zuverlässigkeit eingebetteter Systeme) Safety and Reliability Analysis Models: Overview Content Classification Hazard and Operability Study (HAZOP) Preliminary Hazard Analysis (PHA) Event
Deriving safety requirements according to ISO for complex systems: How to avoid getting lost?
 Deriving safety requirements according to ISO 26262 for complex systems: How to avoid getting lost? Thomas Frese, Ford-Werke GmbH, Köln; Denis Hatebur, ITESYS GmbH, Dortmund; Hans-Jörg Aryus, SystemA GmbH,
Deriving safety requirements according to ISO 26262 for complex systems: How to avoid getting lost? Thomas Frese, Ford-Werke GmbH, Köln; Denis Hatebur, ITESYS GmbH, Dortmund; Hans-Jörg Aryus, SystemA GmbH,
Frameworx Conformance Certification Scoring Guidelines
 Frameworx Conformance Certification Scoring Guidelines September 2016 2016 TM Forum 1 Business Process Framework (etom) Scoring Guidelines The Business Process Framework Conformance scores are granted
Frameworx Conformance Certification Scoring Guidelines September 2016 2016 TM Forum 1 Business Process Framework (etom) Scoring Guidelines The Business Process Framework Conformance scores are granted
COMPASS GRAPHICAL MODELLER
 COMPASS GRAPHICAL MODELLER Viet Yen Nguyen Software Modelling and Verification Group RWTH Aachen University Final Presentation Days, April 2012, ESTEC Christian Dehnert, Joost-Pieter Katoen, Thomas Noll
COMPASS GRAPHICAL MODELLER Viet Yen Nguyen Software Modelling and Verification Group RWTH Aachen University Final Presentation Days, April 2012, ESTEC Christian Dehnert, Joost-Pieter Katoen, Thomas Noll
Model-Based Systems Engineering Backbone of the Thales Engineering Manifesto
 www.thalesgroup.com Model-Based Systems Engineering Backbone of the Thales Engineering Manifesto MBSE Symposium, Canberra Oct. 28 th, 2014 Olivier Flous, VP Engineering 2 / Thales: Company Profile Collective
www.thalesgroup.com Model-Based Systems Engineering Backbone of the Thales Engineering Manifesto MBSE Symposium, Canberra Oct. 28 th, 2014 Olivier Flous, VP Engineering 2 / Thales: Company Profile Collective
Modeling and Simulation for Heterogeneous systems
 Modeling and Simulation for Heterogeneous systems Hosted Simulation for airvehicle subsystem design Henric Andersson Saab Aerosystems 2008-02-06 My background Control engineer from ISY Linköping University
Modeling and Simulation for Heterogeneous systems Hosted Simulation for airvehicle subsystem design Henric Andersson Saab Aerosystems 2008-02-06 My background Control engineer from ISY Linköping University
Coupled Simulations Using different Tools
 Coupled Simulations Using different Tools Dag Fritzson MODPROD Workshop 2007-02-07 2007-03-13 SKF Slide 1 MODPROD Contents Why coupled simulations? - Problem definition Meta-Modelling TLM Co-Simulation
Coupled Simulations Using different Tools Dag Fritzson MODPROD Workshop 2007-02-07 2007-03-13 SKF Slide 1 MODPROD Contents Why coupled simulations? - Problem definition Meta-Modelling TLM Co-Simulation
Foundation of Contract for Things
 Foundation of Contract for Things C.Sofronis, O.Ferrante, A.Ferrari, L.Mangeruca ALES S.r.l. Rome The Internet of System Engineering INCOSE-IL Seminar, Herzliya, Israel 15 September, 2011 Software Platform
Foundation of Contract for Things C.Sofronis, O.Ferrante, A.Ferrari, L.Mangeruca ALES S.r.l. Rome The Internet of System Engineering INCOSE-IL Seminar, Herzliya, Israel 15 September, 2011 Software Platform
Design optimisation of industrial robots using the Modelica multi-physics modeling language
 Design optimisation of industrial robots using the Modelica multi-physics modeling language A. Kazi, G. Merk, M. Otter, H. Fan, (ArifKazi, GuentherMerk)@kuka-roboter.de (Martin.Otter, Hui.Fan)@dlr.de KUKA
Design optimisation of industrial robots using the Modelica multi-physics modeling language A. Kazi, G. Merk, M. Otter, H. Fan, (ArifKazi, GuentherMerk)@kuka-roboter.de (Martin.Otter, Hui.Fan)@dlr.de KUKA
Final Presentation AUTOCOGEQ GMV, 2017 Property of GMV All rights reserved UNCLASSIFIED INFORMATION
 @ESTEC GMV, 2017 Property of GMV All rights reserved UNCLASSIFIED INFORMATION El presente documento está clasificado como "GMV-XXXX". Esta clasificación habilita a su receptor al uso de la información
@ESTEC GMV, 2017 Property of GMV All rights reserved UNCLASSIFIED INFORMATION El presente documento está clasificado como "GMV-XXXX". Esta clasificación habilita a su receptor al uso de la información
On the link between Architectural Description Models and Modelica Analyses Models
 On the link between Architectural Description Models and Modelica Analyses Models Damien Chapon Guillaume Bouchez Airbus France 316 Route de Bayonne 31060 Toulouse {damien.chapon,guillaume.bouchez}@airbus.com
On the link between Architectural Description Models and Modelica Analyses Models Damien Chapon Guillaume Bouchez Airbus France 316 Route de Bayonne 31060 Toulouse {damien.chapon,guillaume.bouchez}@airbus.com
CIM-Compliant Model-to-Model Transformation
 CIM-Compliant Model-to-Model Transformation For Modelica Models Generation and Power Systems Dynamic Simulations Francisco J. Gómez 1, Prof. Luigi Vanfretti 1 Svein H. Olsen 2 fragom@kth.se, luigiv@kth.se
CIM-Compliant Model-to-Model Transformation For Modelica Models Generation and Power Systems Dynamic Simulations Francisco J. Gómez 1, Prof. Luigi Vanfretti 1 Svein H. Olsen 2 fragom@kth.se, luigiv@kth.se
The Avionics System Test Bench, Functional Engineering Simulator: New Developments in Support of Mission and System Verification
 The Avionics System Test Bench, Functional Engineering Simulator: New Developments in Support of Mission and System Verification INTRODUCTION 11th Int. WS on Simulation & EGSE facilities for Space Programmes
The Avionics System Test Bench, Functional Engineering Simulator: New Developments in Support of Mission and System Verification INTRODUCTION 11th Int. WS on Simulation & EGSE facilities for Space Programmes
Test and Evaluation of Autonomous Systems in a Model Based Engineering Context
 Test and Evaluation of Autonomous Systems in a Model Based Engineering Context Raytheon Michael Nolan USAF AFRL Aaron Fifarek Jonathan Hoffman 3 March 2016 Copyright 2016. Unpublished Work. Raytheon Company.
Test and Evaluation of Autonomous Systems in a Model Based Engineering Context Raytheon Michael Nolan USAF AFRL Aaron Fifarek Jonathan Hoffman 3 March 2016 Copyright 2016. Unpublished Work. Raytheon Company.
On graph-based design languages for consistent multi-disciplinary models
 Presented at: Rudolph, S.: On graph-based design languages for consistent multi-disciplinary models. 9th MODPROD May 11, Workshop 2011 on Model-Based Product Development, Linköping University, Sweden,
Presented at: Rudolph, S.: On graph-based design languages for consistent multi-disciplinary models. 9th MODPROD May 11, Workshop 2011 on Model-Based Product Development, Linköping University, Sweden,
Model Based Systems Engineering at DARP. Alek Radjenovic (Malcolm Wallace, Philippa Conmy, John McDermid, Richard Paige)
") Model Based Systems Engineering at DARP Alek Radjenovic (Malcolm Wallace, Philippa Conmy, John McDermid, Richard Paige) Outline Background to HIRTS DARP Architectural Descriptions and Modelling Contracts
Model Based Systems Engineering at DARP Alek Radjenovic (Malcolm Wallace, Philippa Conmy, John McDermid, Richard Paige) Outline Background to HIRTS DARP Architectural Descriptions and Modelling Contracts
EXPERIENCES FROM MODEL BASED DEVELOPMENT OF DRIVE-BY-WIRE CONTROL SYSTEMS
 EXPERIENCES FROM MODEL BASED DEVELOPMENT OF DRIVE-BY-WIRE CONTROL SYSTEMS Per Johannessen 1, Fredrik Törner 1 and Jan Torin 2 1 Volvo Car Corporation, Department 94221, ELIN, SE-405 31 Göteborg, SWEDEN;
EXPERIENCES FROM MODEL BASED DEVELOPMENT OF DRIVE-BY-WIRE CONTROL SYSTEMS Per Johannessen 1, Fredrik Törner 1 and Jan Torin 2 1 Volvo Car Corporation, Department 94221, ELIN, SE-405 31 Göteborg, SWEDEN;
Best Practices for Model-Based Systems Engineering
 Seminar / Workshop Best Practices for Model-Based Systems Engineering Hans-Peter Hoffmann, Ph.D. Chief Systems Methodologist, IBM Rational Software hoffmape@us.ibm.com Overview Successfully delivering
Seminar / Workshop Best Practices for Model-Based Systems Engineering Hans-Peter Hoffmann, Ph.D. Chief Systems Methodologist, IBM Rational Software hoffmape@us.ibm.com Overview Successfully delivering
Model Driven Development with xtuml and BridgePoint
 Model Driven Development with xtuml and BridgePoint xtuml Executable and Translatable UML Unified Modeling Language Industry standard notation Family of languages Executable UML Defines a method, including:
Model Driven Development with xtuml and BridgePoint xtuml Executable and Translatable UML Unified Modeling Language Industry standard notation Family of languages Executable UML Defines a method, including:
Modelling & Simulation of Complex Socio-Cyber- Physical Systems and Large Scale Systems of Systems
 Modelling & Simulation of Complex Socio-Cyber- Physical Systems and Large Scale Systems of Systems Along their Lifetime, a System Owner Standpoint CSDM 2016 December 13-14, 2016 N. Thuy - EDF R&D General
Modelling & Simulation of Complex Socio-Cyber- Physical Systems and Large Scale Systems of Systems Along their Lifetime, a System Owner Standpoint CSDM 2016 December 13-14, 2016 N. Thuy - EDF R&D General
Citation for published version (APA): Bhanderi, D. (2001). ACS Rømer Algorithms Verification and Validation. RØMER.
: Bhanderi, D. (2001). ACS Rømer Algorithms Verification and Validation. RØMER.") Aalborg Universitet ACS Rømer Algorithms Verification and Validation Bhanderi, Dan Publication date: 2001 Document Version Publisher's PDF, also known as Version of record Link to publication from Aalborg
Aalborg Universitet ACS Rømer Algorithms Verification and Validation Bhanderi, Dan Publication date: 2001 Document Version Publisher's PDF, also known as Version of record Link to publication from Aalborg
An Introduction to Lustre
 An Introduction to Lustre Monday Oct 06, 2014 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/35 ES Programming languages Which language to write embedded software in? Traditional: low-level
An Introduction to Lustre Monday Oct 06, 2014 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/35 ES Programming languages Which language to write embedded software in? Traditional: low-level
Needs for performance of Large Scale Modeling & Simulation
 Needs for performance of Large Scale ing & Simulation MODPROD 2010 Henric Andersson Saab Aeronautics / IEI-LiU This work is related to the NFFP5 and Crescendo research programs MODEL BASED DEVELOPMENT
Needs for performance of Large Scale ing & Simulation MODPROD 2010 Henric Andersson Saab Aeronautics / IEI-LiU This work is related to the NFFP5 and Crescendo research programs MODEL BASED DEVELOPMENT
Design for Reliability Techniques - Identification and Management of Reliability Critical Components
 Design for Reliability Techniques - Identification and Management of Reliability Critical Components Created by Michael Shover, Ph.D., Advanced Energy Industries, Inc. Abstract Markets that require rapid
Design for Reliability Techniques - Identification and Management of Reliability Critical Components Created by Michael Shover, Ph.D., Advanced Energy Industries, Inc. Abstract Markets that require rapid
Model-based control of a handling system with SysML
 Available online at www.sciencedirect.com Procedia Computer Science 16 (2013 ) 197 205 Conference on Syst Eds.: C.J.J. Paredis, C. Bishop, D. Bodner, Georgia Institute of Technology, Atlanta, GA, March
Available online at www.sciencedirect.com Procedia Computer Science 16 (2013 ) 197 205 Conference on Syst Eds.: C.J.J. Paredis, C. Bishop, D. Bodner, Georgia Institute of Technology, Atlanta, GA, March
Software Development Chapter 1
 Software Development Chapter 1 1. Introduction Software Applications are increasingly used to tackle problems that concern everyday life : Automatic Bank tellers Airline reservation systems Air traffic
Software Development Chapter 1 1. Introduction Software Applications are increasingly used to tackle problems that concern everyday life : Automatic Bank tellers Airline reservation systems Air traffic
Automotive Functional Safety
 Automotive Functional Safety Complexity, Confidence, Compliance, Certification Farmington, 2018-03-22 23.03.2018 150 years TÜV SÜD 150 years of inspiring trust Inspiring trust since 1866 The year 2016
Automotive Functional Safety Complexity, Confidence, Compliance, Certification Farmington, 2018-03-22 23.03.2018 150 years TÜV SÜD 150 years of inspiring trust Inspiring trust since 1866 The year 2016
Rotational3D Efficient modelling of 3D effects in rotational mechanics
 Rotational3D - Efficient Modelling of 3D Effects in Rotational Mechanics Rotational3D Efficient modelling of 3D effects in rotational mechanics Johan Andreasson Magnus Gäfvert Modelon AB Ideon Science
Rotational3D - Efficient Modelling of 3D Effects in Rotational Mechanics Rotational3D Efficient modelling of 3D effects in rotational mechanics Johan Andreasson Magnus Gäfvert Modelon AB Ideon Science
raceability Support in OpenModelica Using Open Services for Lifecycle Collaboration (OSLC)
") raceability Support in OpenModelica Using Open Services for Lifecycle Collaboration (OSLC) Alachew Mengist, Adrian Pop, Adeel Asghar, Peter Fritzson MODPROD 2017, Linköping 2017-02-02 1 Agenda Problem
raceability Support in OpenModelica Using Open Services for Lifecycle Collaboration (OSLC) Alachew Mengist, Adrian Pop, Adeel Asghar, Peter Fritzson MODPROD 2017, Linköping 2017-02-02 1 Agenda Problem
Evidence-based Development coupling structured argumentation with requirements development.
 Evidence-based Development coupling structured argumentation with requirements development Jeremy.Dick@integrate.biz integrate 2012 based on paper Paper: EVIDENCE-BASED DEVELOPMENT COUPLING STRUCTURED
Evidence-based Development coupling structured argumentation with requirements development Jeremy.Dick@integrate.biz integrate 2012 based on paper Paper: EVIDENCE-BASED DEVELOPMENT COUPLING STRUCTURED
 Virtual ECUs for Developing Automotive Transmission Software Dr. Thomas Liebezeit 1, Jakob Bräuer 1, Roland Serway 1, Dr. Andreas Junghanns 2 1 IAV GmbH, Carnotstraße 1, 10587 Berlin 2 QTronic GmbH, Alt-Moabit
Virtual ECUs for Developing Automotive Transmission Software Dr. Thomas Liebezeit 1, Jakob Bräuer 1, Roland Serway 1, Dr. Andreas Junghanns 2 1 IAV GmbH, Carnotstraße 1, 10587 Berlin 2 QTronic GmbH, Alt-Moabit
Robust Control Design. for the VEGA Launch Vehicle. during atmospheric flight
 Robust Control Design for the VEGA Launch Vehicle during atmospheric flight Diego Navarro-Tapia Andrés Marcos www.tasc-group.com Technology for AeroSpace Control (TASC) Aerospace Engineering Department
Robust Control Design for the VEGA Launch Vehicle during atmospheric flight Diego Navarro-Tapia Andrés Marcos www.tasc-group.com Technology for AeroSpace Control (TASC) Aerospace Engineering Department
Simulation Exploration Experience: A Communication System and a 3D Real Time Visualization for a Moon base simulated scenario
 2014 IEEE/ACM 18th International Symposium on Distributed Simulation and Real Time Applications Simulation Exploration Experience: A Communication System and a 3D Real Time Visualization for a Moon base
2014 IEEE/ACM 18th International Symposium on Distributed Simulation and Real Time Applications Simulation Exploration Experience: A Communication System and a 3D Real Time Visualization for a Moon base
COrDeT Cannes : Use of domain engineering process to develop reusable architectures and building-blocks
 COrDeT Cannes : Use of domain engineering process to develop reusable architectures and building-blocks G. Garcia 1, X. Olive 1, A. Pasetti 2, O. Rohlik 2, T. Vardanega 3, A.-I. Rodríguez-Rodríguez 4 A.
COrDeT Cannes : Use of domain engineering process to develop reusable architectures and building-blocks G. Garcia 1, X. Olive 1, A. Pasetti 2, O. Rohlik 2, T. Vardanega 3, A.-I. Rodríguez-Rodríguez 4 A.
Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic
 Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic Günther Zauner 1,2, Daniel Leitner 3, Felix Breitenecker 1 1 Vienna University of Technology, Wiedner Hauptstr.
Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic Günther Zauner 1,2, Daniel Leitner 3, Felix Breitenecker 1 1 Vienna University of Technology, Wiedner Hauptstr.
Knowledge-based Systems for Industrial Applications
 Knowledge-based Systems for Industrial Applications 1 The Topic 2 Tasks Goal: Overview of different tasks Systematic and formal characterization as a requirement for theory and implementation Script: Chap.
Knowledge-based Systems for Industrial Applications 1 The Topic 2 Tasks Goal: Overview of different tasks Systematic and formal characterization as a requirement for theory and implementation Script: Chap.
Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education
 DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
Programming Embedded Systems
 Programming Embedded Systems Lecture 10 An introduction to Lustre Wednesday Feb 15, 2012 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/34 Course topic: programming lang. Which language to
Programming Embedded Systems Lecture 10 An introduction to Lustre Wednesday Feb 15, 2012 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/34 Course topic: programming lang. Which language to
Contents 10. Graphs of Trigonometric Functions
 Contents 10. Graphs of Trigonometric Functions 2 10.2 Sine and Cosine Curves: Horizontal and Vertical Displacement...... 2 Example 10.15............................... 2 10.3 Composite Sine and Cosine
Contents 10. Graphs of Trigonometric Functions 2 10.2 Sine and Cosine Curves: Horizontal and Vertical Displacement...... 2 Example 10.15............................... 2 10.3 Composite Sine and Cosine
1st Annual OpenModelica Workshop Feb 2, 2009
 1st Annual OpenModelica Workshop Feb 2, 2009 Workshop Opening OpenModelica Status and Directions 1 To All Participants! Very Welcome to this First Annual OpenModelica Workshop! 2 Goals for the OpenModelica
1st Annual OpenModelica Workshop Feb 2, 2009 Workshop Opening OpenModelica Status and Directions 1 To All Participants! Very Welcome to this First Annual OpenModelica Workshop! 2 Goals for the OpenModelica
Joining efforts. Colocation of CRP research activities within Burkina Faso. Michael Balinga and Julien Colomer
 Joining efforts. Colocation of CRP research activities within Burkina Faso Sentinel Landscapes Meeting Costa Rica: 3 March 2014 Michael Balinga and Julien Colomer Main Purpose Annex 4 Cross regional comparison
Joining efforts. Colocation of CRP research activities within Burkina Faso Sentinel Landscapes Meeting Costa Rica: 3 March 2014 Michael Balinga and Julien Colomer Main Purpose Annex 4 Cross regional comparison
Software Architecture in Action. Flavio Oquendo, Jair C Leite, Thais Batista
 Software Architecture in Action Flavio Oquendo, Jair C Leite, Thais Batista Motivation 2 n In this book you can learn the main software architecture concepts and practices. n We use an architecture description
Software Architecture in Action Flavio Oquendo, Jair C Leite, Thais Batista Motivation 2 n In this book you can learn the main software architecture concepts and practices. n We use an architecture description
RAM Commander. User s Guide. Version 7.6. Reliability, Availability, Maintainability Commander With FMECA, Process&Design FMEA, FTA and Safety
 RAM Commander Version 7.6 Reliability, Availability, Maintainability Commander With FMECA, Process&Design FMEA, FTA and Safety User s Guide The information in this document is subject to change without
RAM Commander Version 7.6 Reliability, Availability, Maintainability Commander With FMECA, Process&Design FMEA, FTA and Safety User s Guide The information in this document is subject to change without
ModelicaML: Getting Started Issue April 2012
 ModelicaML: Getting Started Issue 1.6.5 13. April 2012 Wladimir Schamai EADS Innovation Works (Hamburg, Germany) Linkoping University (Linkoping, Sweden) Abstract: This document provides a short introduction
ModelicaML: Getting Started Issue 1.6.5 13. April 2012 Wladimir Schamai EADS Innovation Works (Hamburg, Germany) Linkoping University (Linkoping, Sweden) Abstract: This document provides a short introduction
UML, SysML and MARTE in Use, a High Level Methodology for Real-time and Embedded Systems
 UML, SysML and MARTE in Use, a High Level Methodology for Real-time and Embedded Systems Alessandra Bagnato *, Imran Quadri and Andrey Sadovykh * TXT e-solutions (Italy) Softeam (France) Presentation Outline
UML, SysML and MARTE in Use, a High Level Methodology for Real-time and Embedded Systems Alessandra Bagnato *, Imran Quadri and Andrey Sadovykh * TXT e-solutions (Italy) Softeam (France) Presentation Outline
Mohammed Bin Rashid Space Centre
 Mohammed Bin Rashid Space Centre Salem Al Marri ADG S&T Salem.Almarri@mbrsc.ae Outline UAE s situation in Space MBRSC overview Current and Future Space missions Products, services and space applications
Mohammed Bin Rashid Space Centre Salem Al Marri ADG S&T Salem.Almarri@mbrsc.ae Outline UAE s situation in Space MBRSC overview Current and Future Space missions Products, services and space applications
An Overview of the SysML-Modelica Transformation Specification
 An Overview of the SysML-Modelica Transformation Specification Christiaan J.J. Paredis 1, Yves Bernard 2, Roger M Burkhart 3. Hans-Peter de Koning 4, Sanford Friedenthal 5, Peter Fritzson 6, Nicolas F
An Overview of the SysML-Modelica Transformation Specification Christiaan J.J. Paredis 1, Yves Bernard 2, Roger M Burkhart 3. Hans-Peter de Koning 4, Sanford Friedenthal 5, Peter Fritzson 6, Nicolas F
Reliability Assurance of CubeSats using Bayesian Nets and Radiation-Induced Fault Propagation Models
 NEPP ETW 2017 Reliability Assurance of CubeSats using Bayesian Nets and Radiation-Induced Fault Propagation Models A. Witulski, R. Austin, G. Karsai, N. Mahadevan, B. Sierawski, R. Schrimpf, R. Reed This
NEPP ETW 2017 Reliability Assurance of CubeSats using Bayesian Nets and Radiation-Induced Fault Propagation Models A. Witulski, R. Austin, G. Karsai, N. Mahadevan, B. Sierawski, R. Schrimpf, R. Reed This
Formal Verification for UML/SysML models
 Formal Verification for UML/SysML models IBM Research Lab - Haifa Content Formal verification v.s. testing Correctness properties Formal verification for Rhapsody models 2 Formal Verification Desired Properties
Formal Verification for UML/SysML models IBM Research Lab - Haifa Content Formal verification v.s. testing Correctness properties Formal verification for Rhapsody models 2 Formal Verification Desired Properties
Towards Run-time Debugging of Equation-based Object-oriented Languages
 Towards Run-time Debugging of Equation-based Object-oriented Languages Adrian Pop and Peter Fritzson Programming Environments Laboratory Department of Computer and Information cience Linköping University
Towards Run-time Debugging of Equation-based Object-oriented Languages Adrian Pop and Peter Fritzson Programming Environments Laboratory Department of Computer and Information cience Linköping University
A Transformation-Based Model of Evolutionary Architecting for Embedded System Product Lines
 A Transformation-Based Model of Evolutionary Architecting for Embedded System Product Lines Jakob Axelsson School of Innovation, Design and Engineering, Mälardalen University, SE-721 23 Västerås, Sweden
A Transformation-Based Model of Evolutionary Architecting for Embedded System Product Lines Jakob Axelsson School of Innovation, Design and Engineering, Mälardalen University, SE-721 23 Västerås, Sweden
EUROMED GNSS II/MEDUSA project
 EUROMED GNSS II/MEDUSA project PBN Implementation Workshop / Go Team PBN Implementation Workshop / Go Team, Tunis, February 2014 1 Contents Euromed GNSS European GNSS (E GNSS), EGNOS and Galileo Euromed
EUROMED GNSS II/MEDUSA project PBN Implementation Workshop / Go Team PBN Implementation Workshop / Go Team, Tunis, February 2014 1 Contents Euromed GNSS European GNSS (E GNSS), EGNOS and Galileo Euromed
System-Software Co-Engineering: Dependability and Safety Perspective
 System-Software Co-Engineering: Dependability and Safety Perspective Y. Yushtein, M. Bozzano, A. Cimatti, J.-P. Katoen, V.Y. Nguyen, Th. Noll, X. Olive, M. Roveri Systems, Software & Technology Department,
System-Software Co-Engineering: Dependability and Safety Perspective Y. Yushtein, M. Bozzano, A. Cimatti, J.-P. Katoen, V.Y. Nguyen, Th. Noll, X. Olive, M. Roveri Systems, Software & Technology Department,
MAENAD Analysis Workbench
 Grant Agreement 260057 Model-based Analysis & Engineering of Novel Architectures for Dependable Electric Vehicles Report type Report name Deliverable D5.2.1 MAENAD Analysis Workbench Dissemination level
Grant Agreement 260057 Model-based Analysis & Engineering of Novel Architectures for Dependable Electric Vehicles Report type Report name Deliverable D5.2.1 MAENAD Analysis Workbench Dissemination level
29 th Annual ITEA Symposium Testing at the Speed of Need
 29 th Annual ITEA Symposium Testing at the Speed of Need More Rapid, Effective and Efficient Test & Evaluation 2 17-20 Sep 2012 3 17-20 Sep 2012 4 17-20 Sep 2012 Why this Presentation 5 17-20 Sep 2012
29 th Annual ITEA Symposium Testing at the Speed of Need More Rapid, Effective and Efficient Test & Evaluation 2 17-20 Sep 2012 3 17-20 Sep 2012 4 17-20 Sep 2012 Why this Presentation 5 17-20 Sep 2012
SysML Modeling Guide for Target System
 SysML Modeling Guide for Target System /4 Table of Contents Scope...4 2 Overview of D-Case and SysML Modeling Guide...4 2. Background and Purpose...4 2.2 Target System of Modeling Guide...5 2.3 Constitution
SysML Modeling Guide for Target System /4 Table of Contents Scope...4 2 Overview of D-Case and SysML Modeling Guide...4 2. Background and Purpose...4 2.2 Target System of Modeling Guide...5 2.3 Constitution
Earth Observation Imperative
 Gregory W. Withee United States Geological Survey (USGS) United States Group on Earth Observation (USGEO) update NRC Board on Research Data and Information January 29, 2009 1 Earth Observation Imperative
Gregory W. Withee United States Geological Survey (USGS) United States Group on Earth Observation (USGEO) update NRC Board on Research Data and Information January 29, 2009 1 Earth Observation Imperative
RAM Commander Fundamentals
 Chapter 5 RAM Commander Fundamentals 151 Chapter 5 RAM Commander Fundamentals This chapter deals with the basic tools repeatedly used in accessing and navigating through RAM Commander data: the product
Chapter 5 RAM Commander Fundamentals 151 Chapter 5 RAM Commander Fundamentals This chapter deals with the basic tools repeatedly used in accessing and navigating through RAM Commander data: the product
Simulink/Stateflow. June 2008
 Simulink/Stateflow Paul Caspi http://www-verimag.imag.fr/ Pieter Mosterman http://www.mathworks.com/ June 2008 1 Introduction Probably, the early designers of Simulink in the late eighties would have been
Simulink/Stateflow Paul Caspi http://www-verimag.imag.fr/ Pieter Mosterman http://www.mathworks.com/ June 2008 1 Introduction Probably, the early designers of Simulink in the late eighties would have been
Research in Model-Based Product Development at PELAB in the MODPROD Center
 class x { public int a; class x { float b; public int func (int a,int b); int a; class x { Asa asad float b; public Asda ad int func int a; Asd (int ad a,int cc b); class x { Asa asad float b; Aac sdscfcc
class x { public int a; class x { float b; public int func (int a,int b); int a; class x { Asa asad float b; public Asda ad int func int a; Asd (int ad a,int cc b); class x { Asa asad float b; Aac sdscfcc
This is the published version of a paper presented at IEEE PES General Meeting 2013.
 http://www.diva-portal.org This is the published version of a paper presented at IEEE PES General Meeting 2013. Citation for the original published paper: Vanfretti, L., Li, W., Bogodorova, T., Panciatici,
http://www.diva-portal.org This is the published version of a paper presented at IEEE PES General Meeting 2013. Citation for the original published paper: Vanfretti, L., Li, W., Bogodorova, T., Panciatici,
Automatic Code Generation in Safety Critical Software
 Automatic Code Generation in Safety Critical Software Development May 6, 2004 Presented by: Stefano Grimaldi, Soma Mitra and Sona Johri Department of Computer and Software Engineering Embry Riddle Aeronautical
Automatic Code Generation in Safety Critical Software Development May 6, 2004 Presented by: Stefano Grimaldi, Soma Mitra and Sona Johri Department of Computer and Software Engineering Embry Riddle Aeronautical
Semantics-Based Integration of Embedded Systems Models
 Semantics-Based Integration of Embedded Systems Models Project András Balogh, OptixWare Research & Development Ltd. n 100021 Outline Embedded systems overview Overview of the GENESYS-INDEXYS approach Current
Semantics-Based Integration of Embedded Systems Models Project András Balogh, OptixWare Research & Development Ltd. n 100021 Outline Embedded systems overview Overview of the GENESYS-INDEXYS approach Current
ROSESAT -- A GRAPHICAL SPACECRAFT SIMULATOR FOR RAPID PROTOTYPING
 ROSESAT -- A GRAPHICAL SPACECRAFT SIMULATOR FOR RAPID PROTOTYPING Xavier Cyril Space Systems Engineering, CAE Electronics Ltd. 8585 Cote de Liesse, Saint Laurent, Quebec, Canada H4T 1G6 FAX: (514) 734
ROSESAT -- A GRAPHICAL SPACECRAFT SIMULATOR FOR RAPID PROTOTYPING Xavier Cyril Space Systems Engineering, CAE Electronics Ltd. 8585 Cote de Liesse, Saint Laurent, Quebec, Canada H4T 1G6 FAX: (514) 734
Reasoning on Business Processes and Ontologies in a Logic Programming Environment
 Reasoning on Business Processes and Ontologies in a Logic Programming Environment Michele Missikoff 1, Maurizio Proietti 1, Fabrizio Smith 1,2 1 IASI-CNR, Viale Manzoni 30, 00185, Rome, Italy 2 DIEI, Università
Reasoning on Business Processes and Ontologies in a Logic Programming Environment Michele Missikoff 1, Maurizio Proietti 1, Fabrizio Smith 1,2 1 IASI-CNR, Viale Manzoni 30, 00185, Rome, Italy 2 DIEI, Università
A Model Driven Approach for Requirements Engineering of Industrial Automation Systems
 A Model Driven Approach for Requirements Engineering of Industrial Automation Systems Hongchao Ji 1 Oliver Lenord 1 Dieter Schramm 2 1 Bosch Rexroth AG, Germany {hongchao.ji, oliver.lenord}@boschrexroth.de
A Model Driven Approach for Requirements Engineering of Industrial Automation Systems Hongchao Ji 1 Oliver Lenord 1 Dieter Schramm 2 1 Bosch Rexroth AG, Germany {hongchao.ji, oliver.lenord}@boschrexroth.de
Verification and Test with Model-Based Design
 Verification and Test with Model-Based Design Flight Software Workshop 2015 Jay Abraham 2015 The MathWorks, Inc. 1 The software development process Develop, iterate and specify requirements Create high
Verification and Test with Model-Based Design Flight Software Workshop 2015 Jay Abraham 2015 The MathWorks, Inc. 1 The software development process Develop, iterate and specify requirements Create high
Development of Generic Ground Systems by the Use of a Standard Modeling Method. Takahiro Yamada JAXA/ISAS March 1, 2005
 Development of Generic Ground Systems by the Use of a Standard Modeling Method Takahiro Yamada JAXA/ISAS March 1, 2005 1 Purpose of This Presentation To explain how spacecraft can be virtualized by using
Development of Generic Ground Systems by the Use of a Standard Modeling Method Takahiro Yamada JAXA/ISAS March 1, 2005 1 Purpose of This Presentation To explain how spacecraft can be virtualized by using
SysML for Telescope System Modeling
 by the INCOSE MBSE Challenge Team SE^2 Presented to the LA chapter of INCOSE, February 2 nd 2010 page 1 Agenda What is SE^2 What is ESO? What is the Challenge project about? The deliverables What have
by the INCOSE MBSE Challenge Team SE^2 Presented to the LA chapter of INCOSE, February 2 nd 2010 page 1 Agenda What is SE^2 What is ESO? What is the Challenge project about? The deliverables What have
AUTOMATED GENERATION OF FDIR FOR THE COMPASS INTEGRATED TOOLSET (AUTOGEF)
") AUTOMATED GENERATION OF FDIR FOR THE COMPASS INTEGRATED TOOLSET (AUTOGEF) (1) Elena Alaña, Héctor Naranjo, (2) Yuri Yushtein, (3) Marco Bozzano, Alessandro Cimatti, Marco Gario, (4) Régis de Ferluc, Gérard
AUTOMATED GENERATION OF FDIR FOR THE COMPASS INTEGRATED TOOLSET (AUTOGEF) (1) Elena Alaña, Héctor Naranjo, (2) Yuri Yushtein, (3) Marco Bozzano, Alessandro Cimatti, Marco Gario, (4) Régis de Ferluc, Gérard
FUSED Framework for System Engineering Hands-on Tutorial SAE AADL 19 April 2012
 FUSED Framework for System Engineering Hands-on Tutorial SAE AADL 19 April 2012 Steve.Vestal@Adventiumlabs.com Tutorial Agenda Overview: Goals and Approach Scenario-Driven Capabilities Overviews Hands-On
FUSED Framework for System Engineering Hands-on Tutorial SAE AADL 19 April 2012 Steve.Vestal@Adventiumlabs.com Tutorial Agenda Overview: Goals and Approach Scenario-Driven Capabilities Overviews Hands-On
COMPLEX EMBEDDED SYSTEMS
 COMPLEX EMBEDDED SYSTEMS Embedded System Design and Architectures Summer Semester 2012 System and Software Engineering Prof. Dr.-Ing. Armin Zimmermann Contents System Design Phases Architecture of Embedded
COMPLEX EMBEDDED SYSTEMS Embedded System Design and Architectures Summer Semester 2012 System and Software Engineering Prof. Dr.-Ing. Armin Zimmermann Contents System Design Phases Architecture of Embedded
Academic Program Review at Illinois State University PROGRAM REVIEW OVERVIEW
 Academic Program Review at Illinois State University PROGRAM REVIEW OVERVIEW For Research and Service Centers Submitting Self-Study Reports Fall 2017 INTRODUCTION Primary responsibility for maintaining
Academic Program Review at Illinois State University PROGRAM REVIEW OVERVIEW For Research and Service Centers Submitting Self-Study Reports Fall 2017 INTRODUCTION Primary responsibility for maintaining
int a; class x { public int a; class x { float b; Asda ad public int a; Asa asad Aac sdscfcc c a
 class x { public int a; class x { float b; public int func (int a,int b); int a; class x { Asa asad float b; public Asda ad int func int a; Asd (int ad a,int cc b); class x { Asa asad float b; Aac sdscfcc
class x { public int a; class x { float b; public int func (int a,int b); int a; class x { Asa asad float b; public Asda ad int func int a; Asd (int ad a,int cc b); class x { Asa asad float b; Aac sdscfcc
Distributed Consensus in Multivehicle Cooperative Control: Theory and Applications
 Distributed Consensus in Multivehicle Cooperative Control: Theory and Applications Wei Ren and Randal W. Beard Springer ISBN: 978-1-84800-014-8 Tutorial Slides Prepared by Wei Ren Department of Electrical
Distributed Consensus in Multivehicle Cooperative Control: Theory and Applications Wei Ren and Randal W. Beard Springer ISBN: 978-1-84800-014-8 Tutorial Slides Prepared by Wei Ren Department of Electrical
The FUSED Meta-Language & Tools for Complex System Engineering
 The FUSED Meta-Language & Tools for Complex System Engineering Steve Vestal Adventium Enterprises steve.vestal@adventiumenterprises.com Hazel Shackleton Adventium Enterprises hazel.shackleton@adventiumenterprises.com
The FUSED Meta-Language & Tools for Complex System Engineering Steve Vestal Adventium Enterprises steve.vestal@adventiumenterprises.com Hazel Shackleton Adventium Enterprises hazel.shackleton@adventiumenterprises.com
Integrating SysML and OWL
 Integrating SysML and OWL Henson Graves Lockheed Martin Aeronautics Company Fort Worth Texas, USA henson.graves@lmco.com Abstract. To use OWL2 for modeling a system design one must be able to construct
Integrating SysML and OWL Henson Graves Lockheed Martin Aeronautics Company Fort Worth Texas, USA henson.graves@lmco.com Abstract. To use OWL2 for modeling a system design one must be able to construct
EXECUTABLE MODELING WITH FUML AND ALF IN PAPYRUS: TOOLING AND EXPERIMENTS
 EXECUTABLE MODELING WITH FUML AND ALF IN PAPYRUS: TOOLING AND EXPERIMENTS Sahar Guermazi*, Jérémie Tatibouet*, Arnaud Cuccuru*, Ed Seidewitz +, Saadia Dhouib*, Sébastien Gérard* * CEA LIST - LISE lab +
EXECUTABLE MODELING WITH FUML AND ALF IN PAPYRUS: TOOLING AND EXPERIMENTS Sahar Guermazi*, Jérémie Tatibouet*, Arnaud Cuccuru*, Ed Seidewitz +, Saadia Dhouib*, Sébastien Gérard* * CEA LIST - LISE lab +
AMASS. Architecture-driven, Multi-concern and Seamless Assurance and Certification of Cyber-Physical Systems
 AMASS Architecture-driven, Multi-concern and Seamless Assurance and Architecture-driven, Multi-concern and Seamless Assurance and Certification of Cyber-Physical Systems AMASS: Technical Vision First EAB
AMASS Architecture-driven, Multi-concern and Seamless Assurance and Architecture-driven, Multi-concern and Seamless Assurance and Certification of Cyber-Physical Systems AMASS: Technical Vision First EAB
Modeling and Simulation of Dynamical Systems
 Seminar Modeling and Simulation of Dynamical Systems Presented by the IEEE Control Systems Society Santa Clara Valley Sunnyvale, 5 February 2011 1 Session 4 Part I: Background Visualization and Virtual
Seminar Modeling and Simulation of Dynamical Systems Presented by the IEEE Control Systems Society Santa Clara Valley Sunnyvale, 5 February 2011 1 Session 4 Part I: Background Visualization and Virtual
Verification, Validation, and Test with Model-Based Design
 2008-01-2709 Verification, Validation, and Test with Model-Based Design Copyright 2008 The MathWorks, Inc Tom Erkkinen The MathWorks, Inc. Mirko Conrad The MathWorks, Inc. ABSTRACT Model-Based Design with
2008-01-2709 Verification, Validation, and Test with Model-Based Design Copyright 2008 The MathWorks, Inc Tom Erkkinen The MathWorks, Inc. Mirko Conrad The MathWorks, Inc. ABSTRACT Model-Based Design with
VELOCITY OPTIMIZATION METHOD OF X-BAND ANTTENA FOR JTTER ATTENUATION
 The 21 st International Congress on Sound and Vibration 13-17 July, 214, Beijing/China VELOCITY IMIZATION METHOD OF X-BAND ANTTENA FOR JTTER ATTENUATION Dae-Kwan Kim, Hong-Taek Choi Satellite Control System
The 21 st International Congress on Sound and Vibration 13-17 July, 214, Beijing/China VELOCITY IMIZATION METHOD OF X-BAND ANTTENA FOR JTTER ATTENUATION Dae-Kwan Kim, Hong-Taek Choi Satellite Control System