City Research Online. Permanent City Research Online URL:
|
|
|
- Stuart Griffith
- 5 years ago
- Views:
Transcription

1 Alvino, C. V., Unal, G.B., Slabaugh, G.G., Peny, B. & Fang, T. (2007). Efficient segmentation based on Eikonal and diffusion equations. International Journal of Computer Mathematics, 84(9), pp doi: / City Research Online Original citation: Alvino, C. V., Unal, G.B., Slabaugh, G.G., Peny, B. & Fang, T. (2007). Efficient segmentation based on Eikonal and diffusion equations. International Journal of Computer Mathematics, 84(9), pp doi: / Permanent City Research Online URL: Copyright & reuse City University London has developed City Research Online so that its users may access the research outputs of City University London's staff. Copyright and Moral Rights for this paper are retained by the individual author(s) and/ or other copyright holders. All material in City Research Online is checked for eligibility for copyright before being made available in the live archive. URLs from City Research Online may be freely distributed and linked to from other web pages. Versions of research The version in City Research Online may differ from the final published version. Users are advised to check the Permanent City Research Online URL above for the status of the paper. Enquiries If you have any enquiries about any aspect of City Research Online, or if you wish to make contact with the author(s) of this paper, please the team at
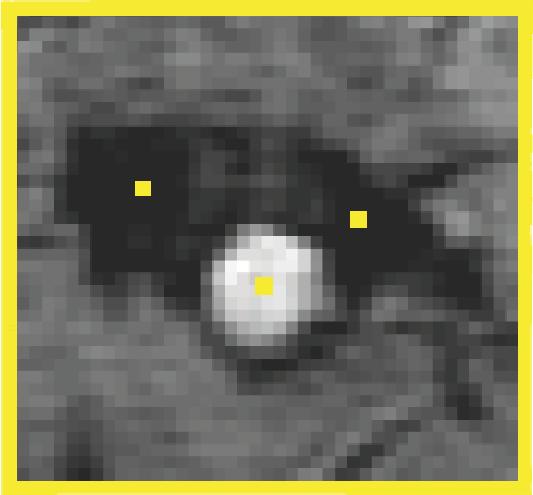
2 International Journal of Computer Mathematics Vol. 00, No. 00, Month 200x, 1 10 Efficient Segmentation Based on Eikonal and Diffusion Equations Christopher Alvino Gozde Unal, Greg Slabaugh, Bertrand Peny, Tong Fang (Received 00 Month 200x; revised 00 Month 200x; in final form 00 Month 200x) Segmentation of regions of interest in an image has important applications in medical image analysis, particularly in computer aided diagnosis. Segmentation can enable further quantitative analysis of anatomical structures. We present efficient image segmentation schemes based on the solution of distinct partial differential equations (PDEs). For each known image region, a PDE is solved, the solution of which locally represents the weighted distance from a region known to have a certain segmentation label. To achieve this goal, we propose the use of two separate PDEs, the Eikonal equation and a diffusion equation. In each method, the segmentation labels are obtained by a competition criterion between the solutions to the PDEs corresponding to each region. We discuss how each method applies the concept of information propagation from the labeled image regions to the unknown image regions. Experimental results are presented on magnetic resonance (MR), computed tomography (CT), and ultrasound images and for both two-region and multi-region segmentation problems. These results demonstrate the high level of efficiency as well as the accuracy of the proposed methods. 1. Introduction Content extraction from images typically relies on segmentation, i.e., extraction of the borders of target structures. Automated segmentation by computer algorithms has been a focus of decades of research [1 3] and remains an active problem in the computer vision literature [4 6]. In practice, the accuracy of segmentation algorithms can be hampered by noise in the image acquisition and the complexity of the arrangement of target objects with respect to their surroundings within the image. In order to achieve robustness to such hindrances, many algorithms demand an increase in computational cost. However, practically useful segmentation techniques should be accurate and computationally efficient for clinical interpretation and so that extensive quantitative analysis can be automated. In this study, highly efficient and mathematically principled techniques are presented to segment the boundaries of closed structures. The techniques are based on ideas of anisotropic information propagation apparent in certain types of partial differential equations (PDEs). This work is motivated by anatomical structures such as lymph nodes, as shown in Fig. 1, whose extraction from medical images, such as magnetic resonance (MR) images, is an important task for subsequent quantitative analysis. Segmentation methods based on information propagation have been performed using distance functions. For example, in [7], simultaneous propagations are performed to estimate two potentials between two points in order to extract the path made by a vessel. The minimal paths between two points, p 0 and p 1, are computed by simultaneous propagations from the two points until they meet at a common point p 2, and by back-propagating to the original two points. They also described an approach to build a path given only a starting point and a given path length. While this approach is suitable for the extraction of tubular structures, our goal is different. Although we also make use of two distance maps, we do not need to extract a minimal path from the point where the two fronts meet, but we seek the result of the competition of the two fronts in reaching a given point. Similarly, in [8,9] a fast marching algorithm was used for segmenting tubular structures like vessels. A multiphase fast marching algorithm was used in [10] in a Bayesian framework, where all distinct regions are propagated simultaneously according to different velocities, which each depended on the posterior distributions for each region. There are also similarities between distance function based algorithms and the watershed algorithm. The Eikonal PDE has been used in [11] for modelling watershed segmentation that is constructed from the watershed of the gradient image. Different segmentation results were obtained by changing the flooding criterion [12]. A form of diffusion has been used for image segmentation in [5] by a random walk concept motivatived by electric potentials. This technique differs from our approach in that it was introduced in a graph theoretic framework, as has become Corresponding author. christopher.alvino@siemens.com Intelligent Vision and Reasoning, Siemens Corporate Research, Princeton, NJ 08540, USA International Journal of Computer Mathematics ISSN print/issn online c 200x Taylor & Francis DOI: / YYxxxxxxxx
![2 Efficient Segmentation with Eikonal and Diffusion Equations popular recently [3, 4], and formulated as system of linear equations solved through conjugate gradient.](/docs-images/89/99250468/images/3-0.jpg "Distance functions are intimately linked to level set methods that provide implicit ways to represent boundaries in a way that is free of parameterization and allows for natural topology change.")
3 2 Efficient Segmentation with Eikonal and Diffusion Equations popular recently [3, 4], and formulated as system of linear equations solved through conjugate gradient. Distance functions are intimately linked to level set methods that provide implicit ways to represent boundaries in a way that is free of parameterization and allows for natural topology change. The original applications of level set methods to image segmentation were introduced by Caselles et al. [13], Malladi et al. [14], and Kichenassamy et al. [15]. Distance functions are used in these techniques to enforce a mathematically well-behaved embedding function for the level set of interest, typically the zero level set. Level set methods were soon applied to implementations of the Mumford-Shah functional [16 18]. In this paper we present four methods. The first three methods compute distance functions treating image locations containing edges or higher gradient magnitude as locally slower to propagate information or as having higher local distance. These three methods employ the Eikonal equation and thus can be computed in O(N log N), where N is the number of image pixels, by the fast marching algorithm [19]. Inspired by the same information propagation concepts, we also present a fourth method based on diffusion PDEs, in which edge information is propagated from the interior of the desired anatomical structure or from the boundary of the region of interest. Figure 1. Example of magnetic resonance (MR) image with a region of interest (ROI) around a lymph node. 2. Segmentation by Distance Function Competition We will explain the technique for the case of two-region segmentations and later explain the natural generalization to the case of multiple region segmentations. The first step in the proposed segmentation technique is to compute a distance function for each known image region. Each distance function represents the distance to the nearest of a set of prespecified points interior to the desired structure. The second distance function represents the distance to a set of prespecified points exterior to the structure. We will defer choice of the prespecified interior and exterior points until later, but for now we will state that they should, respectively, be clearly inside or outside the boundaries of the desired structure to be segmented. The local travel cost for each distance function depends on the local image intensity variation. Regions that are more likely to be edges should be interpreted as regions that have higher local distance. After the computation of the two distance functions, a simple competition criterion between the two distance functions determines which image pixels belong to the interior region and which belong to the exterior region. This concept will be implemented in several different ways. In the first, we weight the distance function directly on the binary map resulting from an edge detection on the image, for instance using a Canny edge detector [20]. In this method, edges correspond to impassable obstacles and the distance function is computed accordingly. The second method generalizes the first method, by defining the local distance as a function of the gradient magnitude of the image. The third method combines the different weights on the distance function. The fourth method is inspired by distance propagation ideas but uses diffusion PDEs as will be explained. The next sections briefly describe the techniques in more detail.
4 Alvino, Unal, Slabaugh, Peny, and Fang Eikonal Equation Method The Eikonal equation, D = F,D = 0 on G (1) is a well known PDE whose solution, D : Ω R n R, where n is the dimensionality of the image, represents the arrival time of a moving front with spatially varying speed, 1/F, that starts at a given set of points, G Ω, at time 0. Here denote the gradient operator. When the speed of the front is uniform within the domain, the arrival time is proportional to the minimum distance to G, the set of starting points. It is for this reason that the solution to the Eikonal equation is often called a distance function. Thus, a common alternate interpretation of the solution to Eq. (1) is that D represents the weighted distance to the set G with locally varying travel cost, F. In this paper, we will use this interpretation and therefore refer to D as a distance function. In our segmentation method the local distance weight will vary accordingly with the presence of image edge or with local intensity variation. The fast marching algorithm was introduced to yield an efficient solution to the Eikonal equation on a uniform discrete grid [19]. While the theory behind the proposed method holds for continuous image domains with differentiable images, we will herein refer to discrete grid locations and thus, we will use finite difference approximations to the derivatives. The proposed Eikonal PDE-based methods proceed as follows: (i) Initialize for the computation of two distance functions, D i and D e, corresponding to the distance from the interior and exterior regions, respectively. a) D i will be solved on the image domain by setting G to a set of points inside the structure to be segmented. Discretely, this will be done by setting the corresponding pixels to a value of 0 and by labelling the corresponding pixels as Known. b) D e will be solved on the image domain by setting G to a set of points clearly outside the structure to be segmented. Discretely, this will be done by setting the corresponding pixels to 0 and by labelling the corresponding pixels as Known. (ii) Compute the two distance functions, D i and D e, by solving two Eikonal PDEs. The Eikonal PDE (solved through fast marching): Label the pixels that are neighbors of the already Known points as Trial pixels. All other image pixels are labeled as Far points. Then, until no Trial pixels remain, do the following action: take the Trial pixel with the lowest distance value, q, label it as a Known pixel, and verify that each neighbor pixel to q that is not Known is labelled as a Trial pixel while updating its value according to the chosen distance function. See [19] for more details. a) Interior: Compute the distance function to the interior set with local travel cost, F, as will be explained in the next sections. The value of each pixel then corresponds to the weighted distance to the interior set and is denoted as D i. This step is initialized with interior points as Known set. b) Exterior: Compute the distance function to the exterior set with local travel cost, F. The value of each pixel then corresponds to the weighted distance to the exterior set and is denoted as D e. This step is initialized with exterior points as Known set. (iii) The interior region is considered the set of points where the interior distance is less than the exterior distance, i.e., the interior set is {(x,y) : D i (x,y) < D e (x,y)} in the case of a two-dimensional image. The local travel cost, F, of the distance functions are explained in the following sections. We are proposing three different techniques for assigning this travel cost based on the image data. The first technique is based on the presence or absence of edge in the image. The second is based on local intensity variation and the third is a hybrid of the first two techniques Fast Marching with Edge Map. Our first approach is to compute the distance function in a way such that edge pixels represent points where the moving front cannot propagate at all. The Eikonal equation is then, D = 1,D = 0 on G, (2) 1 E
5 4 Efficient Segmentation with Eikonal and Diffusion Equations where E is the edge map that assumes the value of 1 ǫ where there are edges and the value of 0 at all other pixels. Note that we are interested in the nature of the solution where ǫ > 0 approaches 0 in order to represent locally infinite travel cost 1. The edge map can be derived from any edge detection algorithm that has binary output. In our results, we use a Canny edge detector [20]. At this point it is important to note how the proposed method differs from using the Canny edge detection algorithm alone. The Canny edge detection algorithm simply reports an edge map that has no a priori known topology, i.e., it does not necessarily partition the region of interest into clear interior and exterior regions. The problem of obtaining a labelling for each pixel as an interior or exterior region is thus not solved by edge detection alone. It for this reason that we propose the use of the competition algorithm. In the fast marching algorithm the edge pixels are marked as having infinite local travel cost and their initial label is set to Known. In this way they will not be processed during the distance function computation. The first column in Figure 2 depicts the two distance functions computed by starting from both the exterior and the interior seed points. The distance is represented in gray scale with white corresponding to high distance and black corresponding to low distance. Note how the exterior distance function has high distance inside the lymph node and low distance outside the lymph node, and the opposite is true for the interior distance function Fast Marching with Gradient. In the second method, we treat regions with high gradient magnitude as having high local travel cost, and regions with low gradient magnitude as having low local distance. The Eikonal equation then takes the form: D = I,D = 0 on G, (3) Note that this method has the potential to be more robust to errors in the edge map since it allows moderate levels of intensity variation to affect the local travel cost by a moderate amount instead of necessarily being classified as either edge or non-edge, neither of which classification is completely appropriate. Contrast this to the edge map method in Section in which pixels that are erroneously considered as edge or non-edge will have a definite negative impact on the distance functions and, as a result, on the final segmentations. Furthermore, note that by considering the Eikonal equation, D = f( I ), we further generalize this method. Note that f should typically be non-negative and monotonically increasing. Certain choices of the function, f, in particular those that resemble thresholding functions such as the sigmoid, show the relationship between the current method and the method in Section since edge maps typically resemble such functions of the image gradient magnitude, I. The second column in Figure 2 depicts the two distance functions computed in this way Combined Method. In the second method explained in Section 2.1.2, which uses the gradient magnitude in the computation of the distance function, there were cases where the distance function was allowed to propagate too quickly through breaks in the boundary of the structure to be segmented. To prevent such leaks and to increase robustness to noise, one can combine the first two methods in Section and This corresponds to weighting the distance function by edge information. The method consists of the computation of the edge map, E, to result in a binary image assuming the value E = 1 on edge pixels and E = 0 elsewhere. This binary image is then directly added to the gradient image by a factor α. The Eikonal equation then takes the form: D = ( I + αe). (4) Specific choice of the parameter, α, depends on the level of trust that can be placed in the edge map, with higher trust corresponding to higher values of α. This will result in increased gradient effects where there are edges as compared with the method in Section The implementation of this technique does not require the use of limits or a specific choice of ǫ since we can implement the locally infinite travel cost present at edges by simply not allowing information to propagate with the fast marching algorithm.
, i.e., with non-linear functions of the gradient image.")
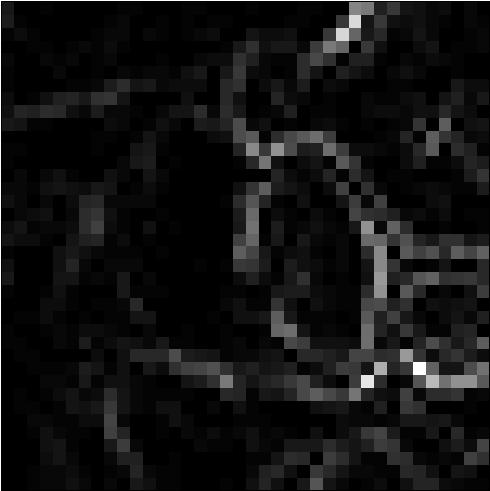
6 Alvino, Unal, Slabaugh, Peny, and Fang 5 Figure 2. Top row: Exterior distance function; Bottom row: Interior distance function. Columns 1. edge map method; 2. image gradient magnitude method; 3. diffusion method. Note that this technique, which assigns additional travel cost to areas where there are definite image edges, is in the spirit of considering the Eikonal equation, D = f( I ), i.e., with non-linear functions of the gradient image. For instance, choosing the function, f(z) = e ( z+t) (5) where t represents an image gradient magnitude threshold and can be chosen automatically based on the range values that magnitude of the image gradient assumes. Many choices can be made for the function, f, but a full exploration of these choices is beyond the scope of this paper. We find that the Eikonal equation in Eq. 4 achieves suitable results and combines the previous two methods in a natural fashion. Part of the flexibility of the proposed methods in this paper are that different PDEs can be used for each region. That is, the interior distance function can be obtained by solving a different PDE than that producing the exterior distance function. This flexibility may, for example, assist in the segmentation of interior regions that are textured. One can add, to the interior distance function, some interior intensity based term, which will smooth the local gradient and decrease some texture or noise influence. Due to the nature of the main application, i.e., lymph node segmentation, we do not smooth the exterior distance function in a similar fashion since exterior regions may include other structures that may interfere with the segmentation. In order to achieve this, we compute the mean intensity of a set of points adjacent to the foreground seed points as Î. The image at each pixel, p, will then have a local weight of (I(p) Î)2, which we add to the local travel cost in the Eikonal equation for the interior region with a weighting parameter, β as follows, D i = ( ( ) ) 2 I + αe + β I Î, (6) where again, E is the binary edge map and Î is the mean intensity of points adjacent to the interior region seed points. Thus, the final combined method assumes the use of Eq. 4 for computation of the exterior distance function and Eq. 6 for the computation of the interior distance function Diffusion Equation The technique proposed in this section differs from the above techniques in that we use a diffusion equation to propagate image information rather than the Eikonal equation. Note that although the nature of information propagation in diffusion equations is significantly different than that in the Eikonal equation, particularly that diffusion equations propagate information with infinite speed, we find that this technique propagates information in a similar
7 6 Efficient Segmentation with Eikonal and Diffusion Equations manner to the previously mentioned distance function based techniques. Perhaps the reason for this similarity is that diffusion equations propagate information in a gradual manner that depends on the proximity to the information source. Diffusion equations propagate information with infinite speed, but in a way such that the majority of the effect is local. The linear heat equation on a function D( x,t) : Ω [0, ) R, where x Ω, is given by dd dt = D. Here, denotes the Laplacian operator. We consider initial conditions D( x) t=0 = D 0 ( x) = 0 and Dirichlet boundary conditions D = 1 on G for a prespecified seed set G Ω. For more information on the linear heat equation, initial conditions, and Dirichlet boundary conditions, we refer the reader to [21]. An update equation corresponding to the finite difference approximation to this equation for two-dimensional images, that is obtained by implementing a forward Euler numerical scheme with the maximally stable time step ( t = 0.25) is, D(x,y) D(x,y) + t ( D(x,y)) (7) D(x,y) 1 4 D(x + 1,y) + 1 D(x 1,y) D(x,y 1) + 1 D(x,y + 1), (8) 4 hence diffusing edge information from the boundaries towards the non-boundary regions. Inspired by the Eikonal equation and fast marching techniques, where we propagate the information from the boundaries or the seeds of the image domain towards unlabeled points, diffusion equations can also be used for segmentation by creating two smooth distance functions 1, one for the interior seed points and one the exterior seed points. For the interior distance function, D i, the boundary conditions are set to 1 at the interior seed points and the function is initialized to a value of 0 at all other points in the image domain. For the exterior distance function, D e, the boundary conditions are set to 1 at the exterior seed points and the function is initialized to a value of 0 at all others points in the image domain. To introduce image dependent terms to the diffusion equation, we propose the use of an anisotropic diffusion that depends on the local image variation, allowing less diffusion in directions where the image derivative is lower and more diffusion where the image derivative is higher. The definition of the four one-sided image derivatives around a pixel are given by Ix (x, y) = I(x, y) I(x 1, y), I+ x (x, y) = I(x + 1, y) I(x, y) Iy (x, y) = I(x, y) I(x, y 1), I+ y (x, y) = I(x, y + 1) I(x, y) We can create an image-based discrete diffusion equation by introducing the image-driven weights to the discrete heat equation as follows, D(x,y) = we ww + 1,y) + 1,y) wid(x wid(x + wn i i i i ws 1) + + 1), (9) wid(x,y wid(x,y w E = e γ(i+ x ) 2, w W = e γ(i x ) 2, w N = e γ(i y )2, w S = e γ(i y )2, i {E,W,N,S}. Note that γ represents a damping coefficient that affects the level of anisotropy inherent in this method. Higher values of γ allow for greater anisotropy, i.e., allow for the information diffusion to be more sensitive to differences in image intensity across the image. We have found a reasonable range for this parameter is < γ < Hence, using the set of seeds for the exterior region and the interior region as two distinct set of boundary conditions, we estimate the two distance functions, D e and D i, corresponding to the exterior and interior after a 1 Note that for consistency with the previous sections, we refer to these functions as distance functions, however that they more closely resemble heat functions as is typically the case with such diffusion equations.
8 Alvino, Unal, Slabaugh, Peny, and Fang 7 set amount of diffusion time. Similar to our approach using Eikonal equation, we form the segmentation map by considering the interior region to be the set of points where the interior distance function is higher than the exterior distance function. The third column in Figure 2 depicts the resulting distance functions estimated by the diffusion method. We run the diffusion for a sufficiently long time for all pixels to be affected by the diffusion but for a short enough time for the diffusion to be practically useful, i.e., to avoid the constant solution D = 1 along the entire domain. In practice, we found that k = 1000 forward Euler iterations produced suitable results and that the results were not particularly sensitive to moderate variations in k. This image-weighted diffusion we seek for our distance function D is similar to that of the diffusion equation presented in the work of Perona and Malik [22] who used anisotropic diffusion for filtering images based on the direction of the image gradient. Using a weighted diffusion equation based on image gradients as, I/ t = (w( I ) I), their purpose is to diffuse intensities of the original image, I, in an edge-preserving manner and not to derive distance functions, D e and D i, as we do. 3. Experimental Results 3.1. Two Region Segmentations The algorithm is not sensitive to the placement of the interior and exterior seed points. It is possible to use any set of exterior or interior seed points as long as they are clearly outside or inside of the target structure, respectively. Of course, a carefully hand labelled contour placed at a uniform distance from the outside of the structure may be ideal for the exterior seed points. However, for simplicity, and to show the robustness of the proposed method to the choice of initial contour, we opted to use a simple mouse drag operation on the image that sets exterior seeds in the form of a 2D rectangular border, as shown in Fig. 1, then the interior seeds are automatically set to the set of pixels in the center of this rectangle. This type of 2D initialization is used in both the 2D and 3D experiments, and is simple and fast for the user since it essentially only requires specifying two points, i.e., the top left point and the bottom right point of the rectangular region of interest. In Figure 3, sample segmentation results (labeled as blue contours) are presented for different lymph nodes in MR images. In analyzing the results based on the edge map algorithm, we see that in some cases the segmentation is not as precise as the other methods. The Canny edge detector propagates strong edges and discards the weak ones, and this leads to either holes in the edge map as in row 1, or edge noise as in rows 3, 4 and 5. This will directly influence the distance functions and in turn, will influence the final segmentation. Still, the result is acceptable and can be used as a suitable fast initialization to a more sophisticated segmentation algorithm. Those errors are reduced by our second approach that uses image gradient in the Eikonal PDE. The distances found are more robust to errors in the edge map functions, and our segmentation matches the desired structure more closely. In cases where a strong edge is situated near the edges of the lymph node, but yet external to the lymph node itself, the method presented in this paper may be slightly attracted to it, such as the bottom right the image in row 1 and the entire surrounding region for the image in row 5. Note that such errors can be fixed by assuming more than two regions are present in the image. We will show example of this in the next section. The diffusion method performs well when images edges are strong and is robust to higher levels of image noise especially the noise that occurs at a single pixel as is commonly referred to as salt and pepper noise. The reason for this is the ability of the diffusion equation to propagate information around a single pixel that, due to noise, has an abnormally high intensity value. This property does not hold for the image gradient based techniques since such noise affects the image gradient in a neighborhood around the pixel, thereby creating a larger region of high local travel cost. However, this method is prone to error when the target objects are merged with other external structures containing high edge content. A startling example of this can be seen in the fifth row of Fig. 3. The high amounts of external intensity variation that are external to the target object will often produce such unsatisfactory results. Finally, our combined method produces the best results, achieving a suitable tradeoff between the results in the edge map method and the image gradient method, even in difficult nodes. This method specifically prohibits the propagation of information where edge is detected, whereas such information often propagates in the image gradient method. However, when edge is not detected, it allows for varying degrees of information propagation depending on the magnitude of the image gradient. We can see in the results Fig. 3 that a suitable tradeoff between the first two methods is achieved and excellent segmentations are produced even in such noisy and complex images.
9 8 Efficient Segmentation with Eikonal and Diffusion Equations 3.2. Comparison with Ground Truth The results are confirmed by the statistics we found during our tests as shown in Table 1. The ground truth of each node segmentation was hand labelled by our own learned interpretation from clinicians. We estimated the empirical probabilities of pixels falsely accepted as foreground (Type I error) or pixels falsely rejected as foreground (Type II error) on the resulting contours of the presented four segmentation methods compared with the manually delineated node contours. These results are compiled over a database of 50 different regions of interest containing lymph nodes in T2 weighted and T2-star weighted magnetic resonance images. The seed regions were kept constant for each node and only the segmentation method varied. The very low value in the Type I error of the edge map method is explained by its preference to label pixels as foreground. This is highlighted by the large probability of Type II error. On the other hand, the gradient and diffusion methods are more prone to erroneous information propagation around edges and thus have then a higher Type I error. However, it is important to note that the overall probability of error is lower in the gradient and diffusion methods than in the edge map method. Finally, the combined method yields the lowest overall error rate Further Experimental Results Segmentation in 3D through Eikonal PDEs is easily achieved by extending the fast marching, and the gradient computations to three dimensions. Example results from two nodes are shown in Fig. 4. We also show the effectiveness of the proposed segmentation techniques in other imaging modalities. The example in Fig. 5 on a Computed Tomography (CT) image shows a selected region of interest containing a liver tumor on the left and the segmentation of the tumor as shown on the right. In Fig. 6, we show segmentation results on the same slice of the same CT volume as in Fig. 5. However, in Fig. 6 we vary the region of interest (ROI) substantially to show the robustness of the segmentation result to different possible ROIs that are likely to have been designated for the tumor in question. In the first row, we show the performance of the algorithm with expected input ROIs, i.e., shifted around the tumor, and the corresponding stable segmentation results. In the second row, we show the performance of the algorithm with extreme, not commonly expected ROIs. In these cases, the proposed algorithm still captures the tumor boundaries in a reasonable way. The 3D tumor extraction results are shown in Fig. 7. Such 3D segmentations can be useful when trying to determine the volume of a tumor, for example to assess the longitudinal efficacy of treatment. Figure 8 shows an example of a breast mass segmentation in an ultrasound image. As we can see, ultrasound images have speckle noise that hampers segmentation, and therefore we had to pre-process the image with high level of smoothing to reduce it. However, the method remains accurate and efficient when the proper level of smoothing is applied. The results show that our algorithm works for different types of structures that have a clear interior and exterior and may be tuned for applications other than lymph node segmentation Computation Speed The Eikonal PDE-based approaches presented in this paper, as expected, are very fast due to the fast computation of the fast marching algorithm. On a 60 by 60 pixel region of interest, the segmentation is complete in less than 0.03 seconds for the 2D algorithm, and 0.76 seconds for the 3D algorithm on a 60 by 60 by 60 pixel region of interest. All results are reported with the algorithms running on a Pentium 4 processor operating at 2.4 GHz. With the diffusion PDE, the segmentation is completed in 1.75 seconds for a 2D implementation. Although we extended the diffusion approach to 3D, the computation times increased to approximately 1 to 2 minutes, therefore, we have not used the diffusion-based approach for the 3D experiments. Considering the high level of accuracy of the proposed algorithms in noisy and complex images, and the relative simplicity of the user supplied labelling, these algorithms achieve a very high computational efficiency Multi-Region Segmentation To illustrate the principled nature of the proposed segmentation techniques, particularly the distance function techniques, we explain the generalization of this technique to segmentation of multiple regions. We will show examples
10 Alvino, Unal, Slabaugh, Peny, and Fang 9 on regions of interest that have three clear regions. The generalization of this technique is mathematically natural. Instead of choosing only interior and exterior seed regions as in the two region segmentation, the multiple region segmentation technique allows for any number of seed regions where each seed region should correspond to a structure of interest within the image. For each seed region, we then compute a distance function from that seed region as before. The segmentation labels are assigned by determining which distance function has the lowest value for a given pixel. That is, for a each label index, i, the set of points corresponding to that region, L i is given by, L i = {(x,y) : D i (x,y) D j (x,y), j i}. (10) Note that some pixels may be defined with multiple labels with such a definition, however, these pixels are typically pixels that are on the border between two or more regions and can be thus considered border pixels, or can be assigned to one region of the other without any loss in the utility of the method. This generalization is both mathematically natural and matches our geometric intuition. Figure 9 shows some examples of three region segmentations. Each row in this figure corresponds to a different region of interest in the MR lymph node segmentation application. The left column shows the initial region of interest (ROI) along with the user specified seeds in yellow. Note that there are typically two foreground seeds and a single background seed surrounding the entire region. In the final row however, there are two foreground seeds, one of which is split along the two dark blood vessels, and one of which is in the white lymph node. The middle column shows the gradient of the smoothed ROI, and the right column shows the corresponding final segmentation result using the method of distance function locally weighted by the image gradient alone, i.e., D = I. For each image, one seed region is the rectangular box surrounding the structure and two interior seed regions are chosen, one inside of each region of interest as shown in the first column. Using a multi-region segmentation method is particularly helpful in that it allows for explicit modelling of structures that have significant edge information and that are external to the structure of interest, rather than having these structures confound the distance functions and thus, create errors in the final two-region segmentation. This is particularly the situation for the lymph node application, where lymph nodes are found in the vicinity of the vessels. We should finally note that, as shown in the example in Fig. 6, the multi-region version of the algorithm shows similar levels of flexibility when the center points are no longer directly in the center of the object to be segmented. This level of flexibility is attained by the design of the distance functions, which are not very sensitive to small shifts in the center points. 4. Conclusion In conclusion, we presented efficient image segmentation techniques based on ideas from the Eikonal and diffusion PDEs, by computing the distance functions for the exterior and interior regions, and by determining the final segmentation labels by a competition criterion between the distance functions for reaching a given point. Each method has its pros and cons, according to the image characteristics, but our experiments demonstrated that among the presented methods, the combined edge map and image gradient method achieves the most accurate segmentations, and hence the best utility when compared to the other three methods. We have additionally shown the natural generalization of the two-region method to segmenting multiple regions. The segmentations resulting from this algorithm are both fast and accurate and are beneficial for clinical applications that require segmentation with a minimal amount of user interaction. Acknowledgements We thank Dr. M. Harisinghani, Dr. R. Weissleder at Massachusetts General Hospital (MGH) in Boston, Dr. J. Barentsz at University Medical Center in Nijmegen, Netherlands, for clinical motivation, feedback and providing data, and Dr. R. Seethamraju for discussions, Dr. R. Krieg at Siemens Medical Solution for support of this work.
11 10 Efficient Segmentation with Eikonal and Diffusion Equations Table 1. Estimate type I and type II error probabilities over a database of 50 nodes Edge Map Method Gradient Method Diffusion Method Combined Method Type I Type II References [1] Geman, S., Geman, D.: Stochastics relaxation, Gibbs distributions, and the bayesian restoration of images. IEEE Trans. Pattern Analysis, and Machine Intelligence 6 (1984) [2] Blake, A., Zisserman, A.: Visual Reconstruction. MIT Press (1987) [3] Shi, J., Malik, J.: Normalized cuts and image segmentation. IEEE Trans. Pattern Analysis, and Machine Intelligence 22(8) (2000) [4] Boykov, Y., Jolly, M.: Interactive graph cuts for optimal boundary and region segmentation of objects in N-D images. In: ICCV. Volume 1. (2001) [5] Grady, L., Lea, G.: Multi-label image segmentation for medical applications based on graph-theoretic electric potentials. In: ECCV, Workshop on MIA and MMBIA. (2004) [6] Grady, L., Schwartz, E.L.: Isoperimetric graph partitioning for image segmentation. IEEE Trans. Pattern Analysis, and Machine Intelligence 28(3) (2006) [7] Deschamps, T., Cohen, L.D.: Fast extraction of minimal paths in 3D images and applications to virtual endoscopy. MIA 5(4) (2001) [8] Deschamps, T., Cohen, L.D.: Fast extraction of tubular and tree 3D surfaces with front propagation methods. 16th International Conference on Pattern Recognition (2002) [9] Cohen, L.D., Kimmel, R.: Global minimum for active contour models: A minimal path approach. Int. J. Computer Vision 24(1) (1997) [10] Sifakis, E., Garcia, C., Tziritas, G.: Bayesian level sets for image segmentation. J. Vis. Commun. Im. Repres. 13(1) (2002) [11] Meyer, F., Maragos, P.: Multiscale morphological segmentations based on watershed, flooding, and Eikonal PDE. Proc. Scale Space Theories in Computer Vision (1999) [12] Sofou, A., Maragos, P.: PDE-based modeling of image segmentation using volumic flooding. IEEE Int. Conf. on Image Processing (2003) [13] Caselles, V., Kimmel, R., Sapiro, G.: Geodesic active contours. In: Proc. IEEE Int. Conf. Computer Vision. (1995) [14] Malladi, R., Sethian, J.A., Vermuri, B.C.: Shape modeling with front propagation: A level set approach. IEEE Trans. Pattern Analysis, and Machine Intelligence 17(2) (1995) [15] Kichenassamy, S., Kumar, A., Olver, P.J., Tannenbaum, A., Yezzi, A.J.: Gradient flows and geometric active contour models. In: IEEE Int. Conf. Computer Vision. (1995) [16] Chan, T.F., Vese, L.A.: Active contours without edges. IEEE Trans. Image Process. 10(2) (2001) [17] Tsai, A., Yezzi, A., Willsky, A.: Curve evolution implementation of the Mumford-Shah function for image segmentation, denoising, interpolation, and magnification. IEEE Trans. Image Process. 10(8) (2001) [18] Mumford, D., Shah, J.: Optimal approximations by piecewise smooth functions and associated variational problems. Comm. Pure Applied Math 42 (1989) [19] Sethian, J.: Level Set Methods and Fast Marching Methods. Cambridge Univ. Press (1999) [20] Canny, J.: A computational approach to edge detection. IEEE Trans. Pattern Analysis, and Machine Intelligence 8(6) (1986) [21] Evans, L.C.: Partial Differential Equations. American Mathematical Society (2000) [22] Perona, P., Malik, J.: Scale-space and edge detection using anisotropic diffusion. IEEE Trans. Pattern Analysis, and Machine Intelligence 12(7) (1990)
 (b) (c) (d) (e) (f) Segmentation Results.")



12 Alvino, Unal, Slabaugh, Peny, and Fang 11 Figure 3. (a) (b) (c) (d) (e) (f) Segmentation Results. Columns(a f): a. ROI image; b. Node manually delineated; c. Edge Map Method; d. Gradient Method; e. Diffusion Method, f. Combined Method. Figure 4. 3D Segmentation of anatomic structures based on Eikonal PDEs. Figure 5. A liver tumor is segmented using the Combined Algorithm on a CT volume.




13 12 Efficient Segmentation with Eikonal and Diffusion Equations Figure 6. Liver tumor from same CT volume as in Fig. 5 segmented with different regions of interest (ROIs) of varying size and shape. The resulting segmentations of the liver tumor are shown. First row: with expected input ROIs, shifted around the tumor, and stable segmentation results. Second row: even with extreme, not commonly expected ROIs, the proposed algorithm still captures the tumor boundaries in a reasonable way. Figure 7. 3D Segmentation results on CT sequences of Fig. 5 Figure 8. A breast mass segmented using the Combined Algorithm on a Ultrasound image.


 (b)")
 (f)")
 (j)")
 (n)")
 (r)")
")


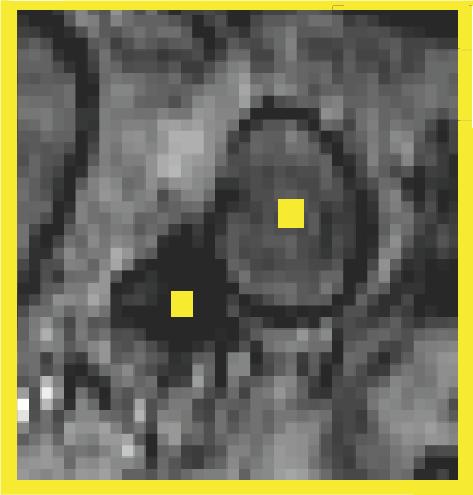
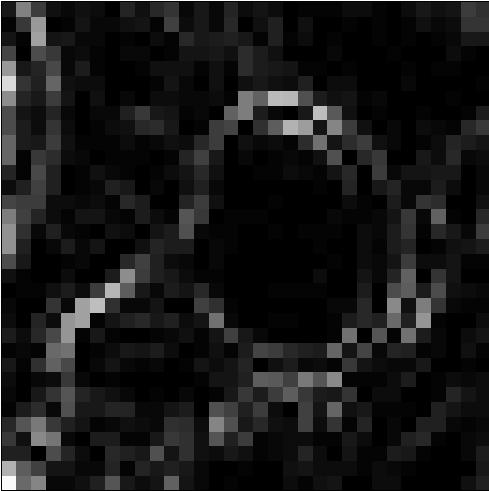
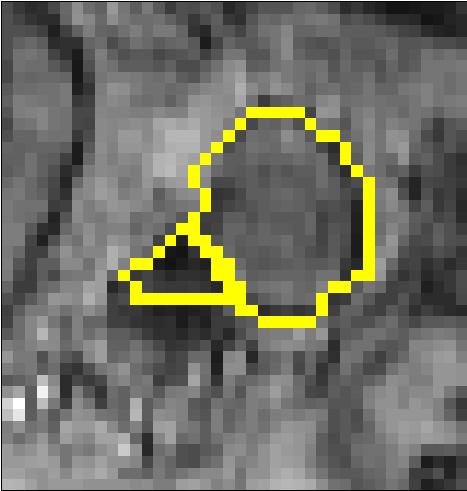
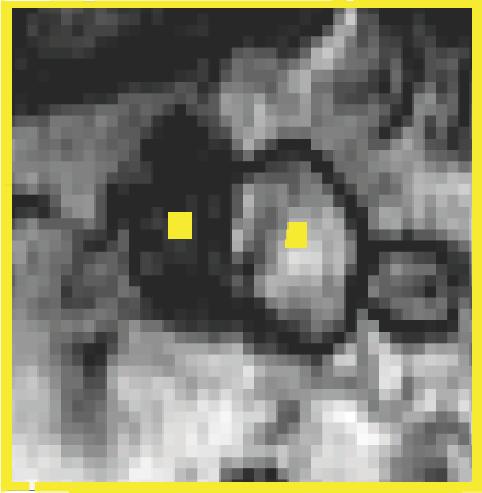

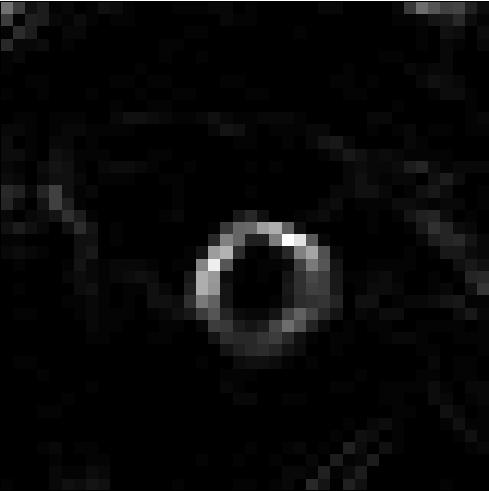

14 Alvino, Unal, Slabaugh, Peny, and Fang 13 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) (m) (n) (o) (p) (q) (r) (s) (t) (u) Figure 9. Example three-region segmentations with lymph nodes and blood vessels as the two foreground regions respectively.
College of Engineering, Trivandrum.
 Analysis of CT Liver Images Using Level Sets with Bayesian Analysis-A Hybrid Approach Sajith A.G 1, Dr. Hariharan.S 2 1 Research Scholar, 2 Professor, Department of Electrical&Electronics Engineering College
Analysis of CT Liver Images Using Level Sets with Bayesian Analysis-A Hybrid Approach Sajith A.G 1, Dr. Hariharan.S 2 1 Research Scholar, 2 Professor, Department of Electrical&Electronics Engineering College
MEDICAL IMAGE NOISE REDUCTION AND REGION CONTRAST ENHANCEMENT USING PARTIAL DIFFERENTIAL EQUATIONS
 MEDICAL IMAGE NOISE REDUCTION AND REGION CONTRAST ENHANCEMENT USING PARTIAL DIFFERENTIAL EQUATIONS Miguel Alemán-Flores, Luis Álvarez-León Departamento de Informática y Sistemas, Universidad de Las Palmas
MEDICAL IMAGE NOISE REDUCTION AND REGION CONTRAST ENHANCEMENT USING PARTIAL DIFFERENTIAL EQUATIONS Miguel Alemán-Flores, Luis Álvarez-León Departamento de Informática y Sistemas, Universidad de Las Palmas
Edge-Preserving Denoising for Segmentation in CT-Images
 Edge-Preserving Denoising for Segmentation in CT-Images Eva Eibenberger, Anja Borsdorf, Andreas Wimmer, Joachim Hornegger Lehrstuhl für Mustererkennung, Friedrich-Alexander-Universität Erlangen-Nürnberg
Edge-Preserving Denoising for Segmentation in CT-Images Eva Eibenberger, Anja Borsdorf, Andreas Wimmer, Joachim Hornegger Lehrstuhl für Mustererkennung, Friedrich-Alexander-Universität Erlangen-Nürnberg
Automated Segmentation Using a Fast Implementation of the Chan-Vese Models
 Automated Segmentation Using a Fast Implementation of the Chan-Vese Models Huan Xu, and Xiao-Feng Wang,,3 Intelligent Computation Lab, Hefei Institute of Intelligent Machines, Chinese Academy of Science,
Automated Segmentation Using a Fast Implementation of the Chan-Vese Models Huan Xu, and Xiao-Feng Wang,,3 Intelligent Computation Lab, Hefei Institute of Intelligent Machines, Chinese Academy of Science,
TUBULAR SURFACES EXTRACTION WITH MINIMAL ACTION SURFACES
 TUBULAR SURFACES EXTRACTION WITH MINIMAL ACTION SURFACES XIANGJUN GAO Department of Computer and Information Technology, Shangqiu Normal University, Shangqiu 476000, Henan, China ABSTRACT This paper presents
TUBULAR SURFACES EXTRACTION WITH MINIMAL ACTION SURFACES XIANGJUN GAO Department of Computer and Information Technology, Shangqiu Normal University, Shangqiu 476000, Henan, China ABSTRACT This paper presents
Active Geodesics: Region-based Active Contour Segmentation with a Global Edge-based Constraint
 Active Geodesics: Region-based Active Contour Segmentation with a Global Edge-based Constraint Vikram Appia Anthony Yezzi Georgia Institute of Technology, Atlanta, GA, USA. Abstract We present an active
Active Geodesics: Region-based Active Contour Segmentation with a Global Edge-based Constraint Vikram Appia Anthony Yezzi Georgia Institute of Technology, Atlanta, GA, USA. Abstract We present an active
City Research Online. Permanent City Research Online URL:
 Slabaugh, G.G., Unal, G.B., Fang, T., Rossignac, J. & Whited, B. Variational Skinning of an Ordered Set of Discrete D Balls. Lecture Notes in Computer Science, 4975(008), pp. 450-461. doi: 10.1007/978-3-540-7946-8_34
Slabaugh, G.G., Unal, G.B., Fang, T., Rossignac, J. & Whited, B. Variational Skinning of an Ordered Set of Discrete D Balls. Lecture Notes in Computer Science, 4975(008), pp. 450-461. doi: 10.1007/978-3-540-7946-8_34
NIH Public Access Author Manuscript Proc Soc Photo Opt Instrum Eng. Author manuscript; available in PMC 2014 October 07.
 NIH Public Access Author Manuscript Published in final edited form as: Proc Soc Photo Opt Instrum Eng. 2014 March 21; 9034: 903442. doi:10.1117/12.2042915. MRI Brain Tumor Segmentation and Necrosis Detection
NIH Public Access Author Manuscript Published in final edited form as: Proc Soc Photo Opt Instrum Eng. 2014 March 21; 9034: 903442. doi:10.1117/12.2042915. MRI Brain Tumor Segmentation and Necrosis Detection
City, University of London Institutional Repository
 City Research Online City, University of London Institutional Repository Citation: Doan, H., Slabaugh, G.G., Unal, G.B. & Fang, T. (2006). Semi-Automatic 3-D Segmentation of Anatomical Structures of Brain
City Research Online City, University of London Institutional Repository Citation: Doan, H., Slabaugh, G.G., Unal, G.B. & Fang, T. (2006). Semi-Automatic 3-D Segmentation of Anatomical Structures of Brain
Integrating Intensity and Texture in Markov Random Fields Segmentation. Amer Dawoud and Anton Netchaev. {amer.dawoud*,
 Integrating Intensity and Texture in Markov Random Fields Segmentation Amer Dawoud and Anton Netchaev {amer.dawoud*, anton.netchaev}@usm.edu School of Computing, University of Southern Mississippi 118
Integrating Intensity and Texture in Markov Random Fields Segmentation Amer Dawoud and Anton Netchaev {amer.dawoud*, anton.netchaev}@usm.edu School of Computing, University of Southern Mississippi 118
SCIENCE & TECHNOLOGY
 Pertanika J. Sci. & Technol. 26 (1): 309-316 (2018) SCIENCE & TECHNOLOGY Journal homepage: http://www.pertanika.upm.edu.my/ Application of Active Contours Driven by Local Gaussian Distribution Fitting
Pertanika J. Sci. & Technol. 26 (1): 309-316 (2018) SCIENCE & TECHNOLOGY Journal homepage: http://www.pertanika.upm.edu.my/ Application of Active Contours Driven by Local Gaussian Distribution Fitting
Method of Background Subtraction for Medical Image Segmentation
 Method of Background Subtraction for Medical Image Segmentation Seongjai Kim Department of Mathematics and Statistics, Mississippi State University Mississippi State, MS 39762, USA and Hyeona Lim Department
Method of Background Subtraction for Medical Image Segmentation Seongjai Kim Department of Mathematics and Statistics, Mississippi State University Mississippi State, MS 39762, USA and Hyeona Lim Department
MR IMAGE SEGMENTATION
 MR IMAGE SEGMENTATION Prepared by : Monil Shah What is Segmentation? Partitioning a region or regions of interest in images such that each region corresponds to one or more anatomic structures Classification
MR IMAGE SEGMENTATION Prepared by : Monil Shah What is Segmentation? Partitioning a region or regions of interest in images such that each region corresponds to one or more anatomic structures Classification
Automatic Logo Detection and Removal
 Automatic Logo Detection and Removal Miriam Cha, Pooya Khorrami and Matthew Wagner Electrical and Computer Engineering Carnegie Mellon University Pittsburgh, PA 15213 {mcha,pkhorrami,mwagner}@ece.cmu.edu
Automatic Logo Detection and Removal Miriam Cha, Pooya Khorrami and Matthew Wagner Electrical and Computer Engineering Carnegie Mellon University Pittsburgh, PA 15213 {mcha,pkhorrami,mwagner}@ece.cmu.edu
Cellular Learning Automata-Based Color Image Segmentation using Adaptive Chains
 Cellular Learning Automata-Based Color Image Segmentation using Adaptive Chains Ahmad Ali Abin, Mehran Fotouhi, Shohreh Kasaei, Senior Member, IEEE Sharif University of Technology, Tehran, Iran abin@ce.sharif.edu,
Cellular Learning Automata-Based Color Image Segmentation using Adaptive Chains Ahmad Ali Abin, Mehran Fotouhi, Shohreh Kasaei, Senior Member, IEEE Sharif University of Technology, Tehran, Iran abin@ce.sharif.edu,
Segmentation in Noisy Medical Images Using PCA Model Based Particle Filtering
 Segmentation in Noisy Medical Images Using PCA Model Based Particle Filtering Wei Qu a, Xiaolei Huang b, and Yuanyuan Jia c a Siemens Medical Solutions USA Inc., AX Division, Hoffman Estates, IL 60192;
Segmentation in Noisy Medical Images Using PCA Model Based Particle Filtering Wei Qu a, Xiaolei Huang b, and Yuanyuan Jia c a Siemens Medical Solutions USA Inc., AX Division, Hoffman Estates, IL 60192;
Implicit Active Contours Driven by Local Binary Fitting Energy
 Implicit Active Contours Driven by Local Binary Fitting Energy Chunming Li 1, Chiu-Yen Kao 2, John C. Gore 1, and Zhaohua Ding 1 1 Institute of Imaging Science 2 Department of Mathematics Vanderbilt University
Implicit Active Contours Driven by Local Binary Fitting Energy Chunming Li 1, Chiu-Yen Kao 2, John C. Gore 1, and Zhaohua Ding 1 1 Institute of Imaging Science 2 Department of Mathematics Vanderbilt University
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Yunyun Yang, Chunming Li, Chiu-Yen Kao and Stanley Osher. Speaker: Chiu-Yen Kao (Math Department, The Ohio State University) BIRS, Banff, Canada
 BIRS, Banff, Canada") Yunyun Yang, Chunming Li, Chiu-Yen Kao and Stanley Osher Speaker: Chiu-Yen Kao (Math Department, The Ohio State University) BIRS, Banff, Canada Outline Review of Region-based Active Contour Models Mumford
Yunyun Yang, Chunming Li, Chiu-Yen Kao and Stanley Osher Speaker: Chiu-Yen Kao (Math Department, The Ohio State University) BIRS, Banff, Canada Outline Review of Region-based Active Contour Models Mumford
CHAPTER 6 DETECTION OF MASS USING NOVEL SEGMENTATION, GLCM AND NEURAL NETWORKS
 130 CHAPTER 6 DETECTION OF MASS USING NOVEL SEGMENTATION, GLCM AND NEURAL NETWORKS A mass is defined as a space-occupying lesion seen in more than one projection and it is described by its shapes and margin
130 CHAPTER 6 DETECTION OF MASS USING NOVEL SEGMENTATION, GLCM AND NEURAL NETWORKS A mass is defined as a space-occupying lesion seen in more than one projection and it is described by its shapes and margin
Level Set Evolution without Reinitilization
 Level Set Evolution without Reinitilization Outline Parametric active contour (snake) models. Concepts of Level set method and geometric active contours. A level set formulation without reinitialization.
Level Set Evolution without Reinitilization Outline Parametric active contour (snake) models. Concepts of Level set method and geometric active contours. A level set formulation without reinitialization.
MULTI-REGION SEGMENTATION
 MULTI-REGION SEGMENTATION USING GRAPH-CUTS Johannes Ulén Abstract This project deals with multi-region segmenation using graph-cuts and is mainly based on a paper by Delong and Boykov [1]. The difference
MULTI-REGION SEGMENTATION USING GRAPH-CUTS Johannes Ulén Abstract This project deals with multi-region segmenation using graph-cuts and is mainly based on a paper by Delong and Boykov [1]. The difference
A Survey of Image Segmentation Based On Multi Region Level Set Method
 A Survey of Image Segmentation Based On Multi Region Level Set Method Suraj.R 1, Sudhakar.K 2 1 P.G Student, Computer Science and Engineering, Hindusthan College Of Engineering and Technology, Tamilnadu,
A Survey of Image Segmentation Based On Multi Region Level Set Method Suraj.R 1, Sudhakar.K 2 1 P.G Student, Computer Science and Engineering, Hindusthan College Of Engineering and Technology, Tamilnadu,
CHAPTER 6 MODIFIED FUZZY TECHNIQUES BASED IMAGE SEGMENTATION
 CHAPTER 6 MODIFIED FUZZY TECHNIQUES BASED IMAGE SEGMENTATION 6.1 INTRODUCTION Fuzzy logic based computational techniques are becoming increasingly important in the medical image analysis arena. The significant
CHAPTER 6 MODIFIED FUZZY TECHNIQUES BASED IMAGE SEGMENTATION 6.1 INTRODUCTION Fuzzy logic based computational techniques are becoming increasingly important in the medical image analysis arena. The significant
Segmentation Using Active Contour Model and Level Set Method Applied to Medical Images
 Segmentation Using Active Contour Model and Level Set Method Applied to Medical Images Dr. K.Bikshalu R.Srikanth Assistant Professor, Dept. of ECE, KUCE&T, KU, Warangal, Telangana, India kalagaddaashu@gmail.com
Segmentation Using Active Contour Model and Level Set Method Applied to Medical Images Dr. K.Bikshalu R.Srikanth Assistant Professor, Dept. of ECE, KUCE&T, KU, Warangal, Telangana, India kalagaddaashu@gmail.com
Hierarchical Segmentation of Thin Structures in Volumetric Medical Images
 Hierarchical Segmentation of Thin Structures in Volumetric Medical Images Michal Holtzman-Gazit 1, Dorith Goldsher 2, and Ron Kimmel 3 1 Electrical Engineering Department 2 Faculty of Medicine - Rambam
Hierarchical Segmentation of Thin Structures in Volumetric Medical Images Michal Holtzman-Gazit 1, Dorith Goldsher 2, and Ron Kimmel 3 1 Electrical Engineering Department 2 Faculty of Medicine - Rambam
Norbert Schuff VA Medical Center and UCSF
 Norbert Schuff Medical Center and UCSF Norbert.schuff@ucsf.edu Medical Imaging Informatics N.Schuff Course # 170.03 Slide 1/67 Objective Learn the principle segmentation techniques Understand the role
Norbert Schuff Medical Center and UCSF Norbert.schuff@ucsf.edu Medical Imaging Informatics N.Schuff Course # 170.03 Slide 1/67 Objective Learn the principle segmentation techniques Understand the role
Image Segmentation Via Iterative Geodesic Averaging
 Image Segmentation Via Iterative Geodesic Averaging Asmaa Hosni, Michael Bleyer and Margrit Gelautz Institute for Software Technology and Interactive Systems, Vienna University of Technology Favoritenstr.
Image Segmentation Via Iterative Geodesic Averaging Asmaa Hosni, Michael Bleyer and Margrit Gelautz Institute for Software Technology and Interactive Systems, Vienna University of Technology Favoritenstr.
Histogram and watershed based segmentation of color images
 Histogram and watershed based segmentation of color images O. Lezoray H. Cardot LUSAC EA 2607 IUT Saint-Lô, 120 rue de l'exode, 50000 Saint-Lô, FRANCE Abstract A novel method for color image segmentation
Histogram and watershed based segmentation of color images O. Lezoray H. Cardot LUSAC EA 2607 IUT Saint-Lô, 120 rue de l'exode, 50000 Saint-Lô, FRANCE Abstract A novel method for color image segmentation
Filters. Advanced and Special Topics: Filters. Filters
 Filters Advanced and Special Topics: Filters Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong Kong ELEC4245: Digital Image Processing (Second Semester, 2016 17)
Filters Advanced and Special Topics: Filters Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong Kong ELEC4245: Digital Image Processing (Second Semester, 2016 17)
Image Smoothing and Segmentation by Graph Regularization
 Image Smoothing and Segmentation by Graph Regularization Sébastien Bougleux 1 and Abderrahim Elmoataz 1 GREYC CNRS UMR 6072, Université de Caen Basse-Normandie ENSICAEN 6 BD du Maréchal Juin, 14050 Caen
Image Smoothing and Segmentation by Graph Regularization Sébastien Bougleux 1 and Abderrahim Elmoataz 1 GREYC CNRS UMR 6072, Université de Caen Basse-Normandie ENSICAEN 6 BD du Maréchal Juin, 14050 Caen
doi: /
 Yiting Xie ; Anthony P. Reeves; Single 3D cell segmentation from optical CT microscope images. Proc. SPIE 934, Medical Imaging 214: Image Processing, 9343B (March 21, 214); doi:1.1117/12.243852. (214)
Yiting Xie ; Anthony P. Reeves; Single 3D cell segmentation from optical CT microscope images. Proc. SPIE 934, Medical Imaging 214: Image Processing, 9343B (March 21, 214); doi:1.1117/12.243852. (214)
Lecture 12 Level Sets & Parametric Transforms. sec & ch. 11 of Machine Vision by Wesley E. Snyder & Hairong Qi
 Lecture 12 Level Sets & Parametric Transforms sec. 8.5.2 & ch. 11 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2017 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these
Lecture 12 Level Sets & Parametric Transforms sec. 8.5.2 & ch. 11 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2017 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these
Local or Global Minima: Flexible Dual-Front Active Contours
 Local or Global Minima: Flexible Dual-Front Active Contours Hua Li 1,2 and Anthony Yezzi 1 1 School of ECE, Georgia Institute of Technology, Atlanta, GA, USA 2 Dept. of Elect. & Info. Eng., Huazhong Univ.
Local or Global Minima: Flexible Dual-Front Active Contours Hua Li 1,2 and Anthony Yezzi 1 1 School of ECE, Georgia Institute of Technology, Atlanta, GA, USA 2 Dept. of Elect. & Info. Eng., Huazhong Univ.
Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing
 Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200,
Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200,
Segmentation. Namrata Vaswani,
 Segmentation Namrata Vaswani, namrata@iastate.edu Read Sections 5.1,5.2,5.3 of [1] Edge detection and filtering : Canny edge detection algorithm to get a contour of the object boundary Hough transform:
Segmentation Namrata Vaswani, namrata@iastate.edu Read Sections 5.1,5.2,5.3 of [1] Edge detection and filtering : Canny edge detection algorithm to get a contour of the object boundary Hough transform:
Texture Image Segmentation using FCM
 Proceedings of 2012 4th International Conference on Machine Learning and Computing IPCSIT vol. 25 (2012) (2012) IACSIT Press, Singapore Texture Image Segmentation using FCM Kanchan S. Deshmukh + M.G.M
Proceedings of 2012 4th International Conference on Machine Learning and Computing IPCSIT vol. 25 (2012) (2012) IACSIT Press, Singapore Texture Image Segmentation using FCM Kanchan S. Deshmukh + M.G.M
SIMULTANEOUS IMAGE DE-NOISING AND REGISTRATION USING GRAPH CUTS: APPLICATION TO CORRUPTED MEDICAL IMAGES. Herve Lombaert, Farida Cheriet
 SIMULTANEOUS IMAGE DE-NOISING AND REGISTRATION USING GRAPH CUTS: APPLICATION TO CORRUPTED MEDICAL IMAGES Herve Lombaert, Farida Cheriet École Polytechnique de Montréal, Montréal Québec, Canada ABSTRACT
SIMULTANEOUS IMAGE DE-NOISING AND REGISTRATION USING GRAPH CUTS: APPLICATION TO CORRUPTED MEDICAL IMAGES Herve Lombaert, Farida Cheriet École Polytechnique de Montréal, Montréal Québec, Canada ABSTRACT
Extract Object Boundaries in Noisy Images using Level Set. Literature Survey
 Extract Object Boundaries in Noisy Images using Level Set by: Quming Zhou Literature Survey Submitted to Professor Brian Evans EE381K Multidimensional Digital Signal Processing March 15, 003 Abstract Finding
Extract Object Boundaries in Noisy Images using Level Set by: Quming Zhou Literature Survey Submitted to Professor Brian Evans EE381K Multidimensional Digital Signal Processing March 15, 003 Abstract Finding
Dr. Ulas Bagci
 Lecture 9: Deformable Models and Segmentation CAP-Computer Vision Lecture 9-Deformable Models and Segmentation Dr. Ulas Bagci bagci@ucf.edu Lecture 9: Deformable Models and Segmentation Motivation A limitation
Lecture 9: Deformable Models and Segmentation CAP-Computer Vision Lecture 9-Deformable Models and Segmentation Dr. Ulas Bagci bagci@ucf.edu Lecture 9: Deformable Models and Segmentation Motivation A limitation
Global Minimization of the Active Contour Model with TV-Inpainting and Two-Phase Denoising
 Global Minimization of the Active Contour Model with TV-Inpainting and Two-Phase Denoising Shingyu Leung and Stanley Osher Department of Mathematics, UCLA, Los Angeles, CA 90095, USA {syleung, sjo}@math.ucla.edu
Global Minimization of the Active Contour Model with TV-Inpainting and Two-Phase Denoising Shingyu Leung and Stanley Osher Department of Mathematics, UCLA, Los Angeles, CA 90095, USA {syleung, sjo}@math.ucla.edu
Snakes, Active Contours, and Segmentation Introduction and Classical Active Contours Active Contours Without Edges
 Level Sets & Snakes Snakes, Active Contours, and Segmentation Introduction and Classical Active Contours Active Contours Without Edges Scale Space and PDE methods in image analysis and processing - Arjan
Level Sets & Snakes Snakes, Active Contours, and Segmentation Introduction and Classical Active Contours Active Contours Without Edges Scale Space and PDE methods in image analysis and processing - Arjan
Keywords: active contours; image segmentation; level sets; PDM; GDM; watershed segmentation.
 IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY Study of Active Contour Modelling for Image Segmentation: A Review Jaspreet Kaur Department of Computer Science & Engineering
IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY Study of Active Contour Modelling for Image Segmentation: A Review Jaspreet Kaur Department of Computer Science & Engineering
Interactive Image Segmentation Using Level Sets and Dempster-Shafer Theory of Evidence
 Interactive Image Segmentation Using Level Sets and Dempster-Shafer Theory of Evidence Björn Scheuermann and Bodo Rosenhahn Leibniz Universität Hannover, Germany {scheuermann,rosenhahn}@tnt.uni-hannover.de
Interactive Image Segmentation Using Level Sets and Dempster-Shafer Theory of Evidence Björn Scheuermann and Bodo Rosenhahn Leibniz Universität Hannover, Germany {scheuermann,rosenhahn}@tnt.uni-hannover.de
An Efficient, Geometric Multigrid Solver for the Anisotropic Diffusion Equation in Two and Three Dimensions
 1 n Efficient, Geometric Multigrid Solver for the nisotropic Diffusion Equation in Two and Three Dimensions Tolga Tasdizen, Ross Whitaker UUSCI-2004-002 Scientific Computing and Imaging Institute University
1 n Efficient, Geometric Multigrid Solver for the nisotropic Diffusion Equation in Two and Three Dimensions Tolga Tasdizen, Ross Whitaker UUSCI-2004-002 Scientific Computing and Imaging Institute University
Variational Methods II
 Mathematical Foundations of Computer Graphics and Vision Variational Methods II Luca Ballan Institute of Visual Computing Last Lecture If we have a topological vector space with an inner product and functionals
Mathematical Foundations of Computer Graphics and Vision Variational Methods II Luca Ballan Institute of Visual Computing Last Lecture If we have a topological vector space with an inner product and functionals
Modern Medical Image Analysis 8DC00 Exam
 Parts of answers are inside square brackets [... ]. These parts are optional. Answers can be written in Dutch or in English, as you prefer. You can use drawings and diagrams to support your textual answers.
Parts of answers are inside square brackets [... ]. These parts are optional. Answers can be written in Dutch or in English, as you prefer. You can use drawings and diagrams to support your textual answers.
Fast 3D Mean Shift Filter for CT Images
 Fast 3D Mean Shift Filter for CT Images Gustavo Fernández Domínguez, Horst Bischof, and Reinhard Beichel Institute for Computer Graphics and Vision, Graz University of Technology Inffeldgasse 16/2, A-8010,
Fast 3D Mean Shift Filter for CT Images Gustavo Fernández Domínguez, Horst Bischof, and Reinhard Beichel Institute for Computer Graphics and Vision, Graz University of Technology Inffeldgasse 16/2, A-8010,
EDGE BASED REGION GROWING
 EDGE BASED REGION GROWING Rupinder Singh, Jarnail Singh Preetkamal Sharma, Sudhir Sharma Abstract Image segmentation is a decomposition of scene into its components. It is a key step in image analysis.
EDGE BASED REGION GROWING Rupinder Singh, Jarnail Singh Preetkamal Sharma, Sudhir Sharma Abstract Image segmentation is a decomposition of scene into its components. It is a key step in image analysis.
Multimodality Imaging for Tumor Volume Definition in Radiation Oncology
 81 There are several commercial and academic software tools that support different segmentation algorithms. In general, commercial software packages have better implementation (with a user-friendly interface
81 There are several commercial and academic software tools that support different segmentation algorithms. In general, commercial software packages have better implementation (with a user-friendly interface
Interactive Differential Segmentation of the Prostate using Graph-Cuts with a Feature Detector-based Boundary Term
 MOSCHIDIS, GRAHAM: GRAPH-CUTS WITH FEATURE DETECTORS 1 Interactive Differential Segmentation of the Prostate using Graph-Cuts with a Feature Detector-based Boundary Term Emmanouil Moschidis emmanouil.moschidis@postgrad.manchester.ac.uk
MOSCHIDIS, GRAHAM: GRAPH-CUTS WITH FEATURE DETECTORS 1 Interactive Differential Segmentation of the Prostate using Graph-Cuts with a Feature Detector-based Boundary Term Emmanouil Moschidis emmanouil.moschidis@postgrad.manchester.ac.uk
Automatically Algorithm for Physician s Handwritten Segmentation on Prescription
 Automatically Algorithm for Physician s Handwritten Segmentation on Prescription Narumol Chumuang 1 and Mahasak Ketcham 2 Department of Information Technology, Faculty of Information Technology, King Mongkut's
Automatically Algorithm for Physician s Handwritten Segmentation on Prescription Narumol Chumuang 1 and Mahasak Ketcham 2 Department of Information Technology, Faculty of Information Technology, King Mongkut's
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
Pearling: Medical Image Segmentation with Pearl Strings
 Pearling: Medical Image Segmentation with Pearl Strings Jarek Rossignac 1, Brian Whited 1, Greg Slabaugh 2, Tong Fang 2, Gozde Unal 2 1 Georgia Institute of Technology Graphics, Visualization, and Usability
Pearling: Medical Image Segmentation with Pearl Strings Jarek Rossignac 1, Brian Whited 1, Greg Slabaugh 2, Tong Fang 2, Gozde Unal 2 1 Georgia Institute of Technology Graphics, Visualization, and Usability
Comparison of Vessel Segmentations using STAPLE
 Comparison of Vessel Segmentations using STAPLE Julien Jomier, Vincent LeDigarcher, and Stephen R. Aylward Computer-Aided Diagnosis and Display Lab The University of North Carolina at Chapel Hill, Department
Comparison of Vessel Segmentations using STAPLE Julien Jomier, Vincent LeDigarcher, and Stephen R. Aylward Computer-Aided Diagnosis and Display Lab The University of North Carolina at Chapel Hill, Department
Multiple Contour Finding and Perceptual Grouping as a set of Energy Minimizing Paths
 Multiple Contour Finding and Perceptual Grouping as a set of Energy Minimizing Paths Laurent D. COHEN and Thomas DESCHAMPS CEREMADE, UMR 7534, Université Paris-Dauphine 75775 Paris cedex 16, France cohen@ceremade.dauphine.fr
Multiple Contour Finding and Perceptual Grouping as a set of Energy Minimizing Paths Laurent D. COHEN and Thomas DESCHAMPS CEREMADE, UMR 7534, Université Paris-Dauphine 75775 Paris cedex 16, France cohen@ceremade.dauphine.fr
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Fast Marching and Geodesic Methods. Some Applications
 Fast Marching and Geodesic Methods. Some Applications Laurent D. COHEN Directeur de Recherche CNRS CEREMADE, UMR CNRS 7534 Université Paris-9 Dauphine Place du Maréchal de Lattre de Tassigny 75016 Paris,
Fast Marching and Geodesic Methods. Some Applications Laurent D. COHEN Directeur de Recherche CNRS CEREMADE, UMR CNRS 7534 Université Paris-9 Dauphine Place du Maréchal de Lattre de Tassigny 75016 Paris,
Various Methods for Medical Image Segmentation
 Various Methods for Medical Image Segmentation From Level Set to Convex Relaxation Doyeob Yeo and Soomin Jeon Computational Mathematics and Imaging Lab. Department of Mathematical Sciences, KAIST Hansang
Various Methods for Medical Image Segmentation From Level Set to Convex Relaxation Doyeob Yeo and Soomin Jeon Computational Mathematics and Imaging Lab. Department of Mathematical Sciences, KAIST Hansang
Fingerprint Classification Using Orientation Field Flow Curves
 Fingerprint Classification Using Orientation Field Flow Curves Sarat C. Dass Michigan State University sdass@msu.edu Anil K. Jain Michigan State University ain@msu.edu Abstract Manual fingerprint classification
Fingerprint Classification Using Orientation Field Flow Curves Sarat C. Dass Michigan State University sdass@msu.edu Anil K. Jain Michigan State University ain@msu.edu Abstract Manual fingerprint classification
An explicit feature control approach in structural topology optimization
 th World Congress on Structural and Multidisciplinary Optimisation 07 th -2 th, June 205, Sydney Australia An explicit feature control approach in structural topology optimization Weisheng Zhang, Xu Guo
th World Congress on Structural and Multidisciplinary Optimisation 07 th -2 th, June 205, Sydney Australia An explicit feature control approach in structural topology optimization Weisheng Zhang, Xu Guo
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Comparison between Various Edge Detection Methods on Satellite Image
 Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Segmentation of Images
 Segmentation of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is a
Segmentation of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is a
Generation of Hulls Encompassing Neuronal Pathways Based on Tetrahedralization and 3D Alpha Shapes
 Generation of Hulls Encompassing Neuronal Pathways Based on Tetrahedralization and 3D Alpha Shapes Dorit Merhof 1,2, Martin Meister 1, Ezgi Bingöl 1, Peter Hastreiter 1,2, Christopher Nimsky 2,3, Günther
Generation of Hulls Encompassing Neuronal Pathways Based on Tetrahedralization and 3D Alpha Shapes Dorit Merhof 1,2, Martin Meister 1, Ezgi Bingöl 1, Peter Hastreiter 1,2, Christopher Nimsky 2,3, Günther
Multiphase Dynamic Labeling for Variational Recognition-Driven Image Segmentation
 Multiphase Dynamic Labeling for Variational Recognition-Driven Image Segmentation Daniel Cremers 1, Nir Sochen 2, and Christoph Schnörr 3 1 Department of Computer Science University of California, Los
Multiphase Dynamic Labeling for Variational Recognition-Driven Image Segmentation Daniel Cremers 1, Nir Sochen 2, and Christoph Schnörr 3 1 Department of Computer Science University of California, Los
Color Image Segmentation
 Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
Topic 4 Image Segmentation
 Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
IMAGE DENOISING USING NL-MEANS VIA SMOOTH PATCH ORDERING
 IMAGE DENOISING USING NL-MEANS VIA SMOOTH PATCH ORDERING Idan Ram, Michael Elad and Israel Cohen Department of Electrical Engineering Department of Computer Science Technion - Israel Institute of Technology
IMAGE DENOISING USING NL-MEANS VIA SMOOTH PATCH ORDERING Idan Ram, Michael Elad and Israel Cohen Department of Electrical Engineering Department of Computer Science Technion - Israel Institute of Technology
A Non-Linear Image Registration Scheme for Real-Time Liver Ultrasound Tracking using Normalized Gradient Fields
 A Non-Linear Image Registration Scheme for Real-Time Liver Ultrasound Tracking using Normalized Gradient Fields Lars König, Till Kipshagen and Jan Rühaak Fraunhofer MEVIS Project Group Image Registration,
A Non-Linear Image Registration Scheme for Real-Time Liver Ultrasound Tracking using Normalized Gradient Fields Lars König, Till Kipshagen and Jan Rühaak Fraunhofer MEVIS Project Group Image Registration,
Hybrid filters for medical image reconstruction
 Vol. 6(9), pp. 177-182, October, 2013 DOI: 10.5897/AJMCSR11.124 ISSN 2006-9731 2013 Academic Journals http://www.academicjournals.org/ajmcsr African Journal of Mathematics and Computer Science Research
Vol. 6(9), pp. 177-182, October, 2013 DOI: 10.5897/AJMCSR11.124 ISSN 2006-9731 2013 Academic Journals http://www.academicjournals.org/ajmcsr African Journal of Mathematics and Computer Science Research
A Systematic Analysis System for CT Liver Image Classification and Image Segmentation by Local Entropy Method
 A Systematic Analysis System for CT Liver Image Classification and Image Segmentation by Local Entropy Method A.Anuja Merlyn 1, A.Anuba Merlyn 2 1 PG Scholar, Department of Computer Science and Engineering,
A Systematic Analysis System for CT Liver Image Classification and Image Segmentation by Local Entropy Method A.Anuja Merlyn 1, A.Anuba Merlyn 2 1 PG Scholar, Department of Computer Science and Engineering,
Graph based Image Segmentation using improved SLIC Superpixel algorithm
 Graph based Image Segmentation using improved SLIC Superpixel algorithm Prasanna Regmi 1, B.J.M. Ravi Kumar 2 1 Computer Science and Systems Engineering, Andhra University, AP, India 2 Computer Science
Graph based Image Segmentation using improved SLIC Superpixel algorithm Prasanna Regmi 1, B.J.M. Ravi Kumar 2 1 Computer Science and Systems Engineering, Andhra University, AP, India 2 Computer Science
Subpixel Corner Detection Using Spatial Moment 1)
") Vol.31, No.5 ACTA AUTOMATICA SINICA September, 25 Subpixel Corner Detection Using Spatial Moment 1) WANG She-Yang SONG Shen-Min QIANG Wen-Yi CHEN Xing-Lin (Department of Control Engineering, Harbin Institute
Vol.31, No.5 ACTA AUTOMATICA SINICA September, 25 Subpixel Corner Detection Using Spatial Moment 1) WANG She-Yang SONG Shen-Min QIANG Wen-Yi CHEN Xing-Lin (Department of Control Engineering, Harbin Institute
Spatial Adaptive Filter for Object Boundary Identification in an Image
 Advances in Computational Sciences and Technology ISSN 0973-6107 Volume 9, Number 1 (2016) pp. 1-10 Research India Publications http://www.ripublication.com Spatial Adaptive Filter for Object Boundary
Advances in Computational Sciences and Technology ISSN 0973-6107 Volume 9, Number 1 (2016) pp. 1-10 Research India Publications http://www.ripublication.com Spatial Adaptive Filter for Object Boundary
Denoising an Image by Denoising its Components in a Moving Frame
 Denoising an Image by Denoising its Components in a Moving Frame Gabriela Ghimpețeanu 1, Thomas Batard 1, Marcelo Bertalmío 1, and Stacey Levine 2 1 Universitat Pompeu Fabra, Spain 2 Duquesne University,
Denoising an Image by Denoising its Components in a Moving Frame Gabriela Ghimpețeanu 1, Thomas Batard 1, Marcelo Bertalmío 1, and Stacey Levine 2 1 Universitat Pompeu Fabra, Spain 2 Duquesne University,
GRAPH BASED SEGMENTATION WITH MINIMAL USER INTERACTION. Huaizhong Zhang, Ehab Essa, and Xianghua Xie
 GRAPH BASED SEGMENTATION WITH MINIMAL USER INTERACTION Huaizhong Zhang, Ehab Essa, and Xianghua Xie Computer Science Department, Swansea University, Swansea SA2 8PP, United Kingdom *http://csvision.swan.ac.uk/
GRAPH BASED SEGMENTATION WITH MINIMAL USER INTERACTION Huaizhong Zhang, Ehab Essa, and Xianghua Xie Computer Science Department, Swansea University, Swansea SA2 8PP, United Kingdom *http://csvision.swan.ac.uk/
A New Algorithm for Detecting Text Line in Handwritten Documents
 A New Algorithm for Detecting Text Line in Handwritten Documents Yi Li 1, Yefeng Zheng 2, David Doermann 1, and Stefan Jaeger 1 1 Laboratory for Language and Media Processing Institute for Advanced Computer
A New Algorithm for Detecting Text Line in Handwritten Documents Yi Li 1, Yefeng Zheng 2, David Doermann 1, and Stefan Jaeger 1 1 Laboratory for Language and Media Processing Institute for Advanced Computer
NSCT BASED LOCAL ENHANCEMENT FOR ACTIVE CONTOUR BASED IMAGE SEGMENTATION APPLICATION
 DOI: 10.1917/ijivp.010.0004 NSCT BASED LOCAL ENHANCEMENT FOR ACTIVE CONTOUR BASED IMAGE SEGMENTATION APPLICATION Hiren Mewada 1 and Suprava Patnaik Department of Electronics Engineering, Sardar Vallbhbhai
DOI: 10.1917/ijivp.010.0004 NSCT BASED LOCAL ENHANCEMENT FOR ACTIVE CONTOUR BASED IMAGE SEGMENTATION APPLICATION Hiren Mewada 1 and Suprava Patnaik Department of Electronics Engineering, Sardar Vallbhbhai
Using Game Theory for Image Segmentation
 Using Game Theory for Image Segmentation Elizabeth Cassell Sumanth Kolar Alex Yakushev 1 Introduction 21st March 2007 The goal of image segmentation, is to distinguish objects from background. Robust segmentation
Using Game Theory for Image Segmentation Elizabeth Cassell Sumanth Kolar Alex Yakushev 1 Introduction 21st March 2007 The goal of image segmentation, is to distinguish objects from background. Robust segmentation
VETOT, Volume Estimation and Tracking Over Time: Framework and Validation
 VETOT, Volume Estimation and Tracking Over Time: Framework and Validation Jean-Philippe Guyon 1, Mark Foskey 1, Jisung Kim 1, Zeynep Firat 2, Barb Davis 3, and Stephen Aylward 1 1 Computer Aided Display
VETOT, Volume Estimation and Tracking Over Time: Framework and Validation Jean-Philippe Guyon 1, Mark Foskey 1, Jisung Kim 1, Zeynep Firat 2, Barb Davis 3, and Stephen Aylward 1 1 Computer Aided Display
THE preceding chapters were all devoted to the analysis of images and signals which
 Chapter 5 Segmentation of Color, Texture, and Orientation Images THE preceding chapters were all devoted to the analysis of images and signals which take values in IR. It is often necessary, however, to
Chapter 5 Segmentation of Color, Texture, and Orientation Images THE preceding chapters were all devoted to the analysis of images and signals which take values in IR. It is often necessary, however, to
3D Surface Reconstruction of the Brain based on Level Set Method
 3D Surface Reconstruction of the Brain based on Level Set Method Shijun Tang, Bill P. Buckles, and Kamesh Namuduri Department of Computer Science & Engineering Department of Electrical Engineering University
3D Surface Reconstruction of the Brain based on Level Set Method Shijun Tang, Bill P. Buckles, and Kamesh Namuduri Department of Computer Science & Engineering Department of Electrical Engineering University
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Digital Image Processing. Prof. P. K. Biswas. Department of Electronic & Electrical Communication Engineering
 Digital Image Processing Prof. P. K. Biswas Department of Electronic & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Lecture - 21 Image Enhancement Frequency Domain Processing
Digital Image Processing Prof. P. K. Biswas Department of Electronic & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Lecture - 21 Image Enhancement Frequency Domain Processing
Continuous and Discrete Optimization Methods in Computer Vision. Daniel Cremers Department of Computer Science University of Bonn
 Continuous and Discrete Optimization Methods in Computer Vision Daniel Cremers Department of Computer Science University of Bonn Oxford, August 16 2007 Segmentation by Energy Minimization Given an image,
Continuous and Discrete Optimization Methods in Computer Vision Daniel Cremers Department of Computer Science University of Bonn Oxford, August 16 2007 Segmentation by Energy Minimization Given an image,
Research Article Image Segmentation Using Gray-Scale Morphology and Marker-Controlled Watershed Transformation
 Discrete Dynamics in Nature and Society Volume 2008, Article ID 384346, 8 pages doi:10.1155/2008/384346 Research Article Image Segmentation Using Gray-Scale Morphology and Marker-Controlled Watershed Transformation
Discrete Dynamics in Nature and Society Volume 2008, Article ID 384346, 8 pages doi:10.1155/2008/384346 Research Article Image Segmentation Using Gray-Scale Morphology and Marker-Controlled Watershed Transformation
Local Image preprocessing (cont d)
") Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Image Segmentation Techniques for Object-Based Coding
 Image Techniques for Object-Based Coding Junaid Ahmed, Joseph Bosworth, and Scott T. Acton The Oklahoma Imaging Laboratory School of Electrical and Computer Engineering Oklahoma State University {ajunaid,bosworj,sacton}@okstate.edu
Image Techniques for Object-Based Coding Junaid Ahmed, Joseph Bosworth, and Scott T. Acton The Oklahoma Imaging Laboratory School of Electrical and Computer Engineering Oklahoma State University {ajunaid,bosworj,sacton}@okstate.edu
Snakes reparameterization for noisy images segmentation and targets tracking
 Snakes reparameterization for noisy images segmentation and targets tracking Idrissi Sidi Yassine, Samir Belfkih. Lycée Tawfik Elhakim Zawiya de Noaceur, route de Marrakech, Casablanca, maroc. Laboratoire
Snakes reparameterization for noisy images segmentation and targets tracking Idrissi Sidi Yassine, Samir Belfkih. Lycée Tawfik Elhakim Zawiya de Noaceur, route de Marrakech, Casablanca, maroc. Laboratoire
Global Journal of Engineering Science and Research Management
 ADVANCED K-MEANS ALGORITHM FOR BRAIN TUMOR DETECTION USING NAIVE BAYES CLASSIFIER Veena Bai K*, Dr. Niharika Kumar * MTech CSE, Department of Computer Science and Engineering, B.N.M. Institute of Technology,
ADVANCED K-MEANS ALGORITHM FOR BRAIN TUMOR DETECTION USING NAIVE BAYES CLASSIFIER Veena Bai K*, Dr. Niharika Kumar * MTech CSE, Department of Computer Science and Engineering, B.N.M. Institute of Technology,
Image Segmentation. Shengnan Wang
 Image Segmentation Shengnan Wang shengnan@cs.wisc.edu Contents I. Introduction to Segmentation II. Mean Shift Theory 1. What is Mean Shift? 2. Density Estimation Methods 3. Deriving the Mean Shift 4. Mean
Image Segmentation Shengnan Wang shengnan@cs.wisc.edu Contents I. Introduction to Segmentation II. Mean Shift Theory 1. What is Mean Shift? 2. Density Estimation Methods 3. Deriving the Mean Shift 4. Mean
Applying Catastrophe Theory to Image Segmentation
 Applying Catastrophe Theory to Image Segmentation Mohamad Raad, Majd Ghareeb, Ali Bazzi Department of computer and communications engineering Lebanese International University Beirut, Lebanon Abstract
Applying Catastrophe Theory to Image Segmentation Mohamad Raad, Majd Ghareeb, Ali Bazzi Department of computer and communications engineering Lebanese International University Beirut, Lebanon Abstract
Segmentation of Image Using Watershed and Fast Level set methods
 Segmentation of Image Using Watershed and Fast Level set methods Minal M. Purani S.A.K.E.C, Mumbai +91-9323106641 minalpuranik@ gmail.com Prof, Shobha Krishnan VESIT, Mumbai shobha krishnan@hotmail.com
Segmentation of Image Using Watershed and Fast Level set methods Minal M. Purani S.A.K.E.C, Mumbai +91-9323106641 minalpuranik@ gmail.com Prof, Shobha Krishnan VESIT, Mumbai shobha krishnan@hotmail.com
(Refer Slide Time 00:17) Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)
 Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)") Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Available Online through
 Available Online through www.ijptonline.com ISSN: 0975-766X CODEN: IJPTFI Research Article ANALYSIS OF CT LIVER IMAGES FOR TUMOUR DIAGNOSIS BASED ON CLUSTERING TECHNIQUE AND TEXTURE FEATURES M.Krithika
Available Online through www.ijptonline.com ISSN: 0975-766X CODEN: IJPTFI Research Article ANALYSIS OF CT LIVER IMAGES FOR TUMOUR DIAGNOSIS BASED ON CLUSTERING TECHNIQUE AND TEXTURE FEATURES M.Krithika
Free-Form Shape Optimization using CAD Models
 Free-Form Shape Optimization using CAD Models D. Baumgärtner 1, M. Breitenberger 1, K.-U. Bletzinger 1 1 Lehrstuhl für Statik, Technische Universität München (TUM), Arcisstraße 21, D-80333 München 1 Motivation
Free-Form Shape Optimization using CAD Models D. Baumgärtner 1, M. Breitenberger 1, K.-U. Bletzinger 1 1 Lehrstuhl für Statik, Technische Universität München (TUM), Arcisstraße 21, D-80333 München 1 Motivation
SurfCut: Free-Boundary Surface Extraction
 SurfCut: Free-Boundary Surface Extraction Marei Algarni and Ganesh Sundaramoorthi King Abdullah University of Science & Technology (KAUST) {marei.algarni, ganesh.sundaramoorthi}@kaust.edu.sa Abstract.
SurfCut: Free-Boundary Surface Extraction Marei Algarni and Ganesh Sundaramoorthi King Abdullah University of Science & Technology (KAUST) {marei.algarni, ganesh.sundaramoorthi}@kaust.edu.sa Abstract.
Image Restoration under Significant Additive Noise
 1 Image Restoration under Significant Additive Noise Wenyi Zhao 1 and Art Pope Sarnoff Corporation 01 Washington Road, Princeton, NJ 08540, USA email: { wzhao, apope }@ieee.org Tel: 408-53-178 Abstract
1 Image Restoration under Significant Additive Noise Wenyi Zhao 1 and Art Pope Sarnoff Corporation 01 Washington Road, Princeton, NJ 08540, USA email: { wzhao, apope }@ieee.org Tel: 408-53-178 Abstract