FYS4220 / RT-lab no SIGNALS
|
|
|
- Rolf Stanley
- 6 years ago
- Views:
Transcription
1 FYS4220 / Oct 2011 /TBS RT-lab no SIGNALS 1 The VxWorks signal IPC facility VxWorks provides a software signal facility. Signals asynchronously alter the control flow of a task or process. Signals are the means by which processes/tasks are notified of the occurrence of significant events in the system, examples are hardware exceptions, POSIX RealTime signals, signals to kill a process, for notifying that a message queue has data, and so on. Each signal has a unique number, value 0 is reserved for use as the null signal. Signals can be disabled or individually enabled. To catch and process a signal a task/process must have installed a signal handler. For VxWorks 6.2 (under Workbench) there is some difference whether the task is a kernel task or a RTP (RealTime Process). Note that the lab exercise tasks are built as kernel modules. For more on VxWorks signals see the lecture, Workbench Help or documentation at the lab. 1.1 POSIX Queued Signals Signals are handled differently in the kernel and in a real-time process. In the kernel the target of a signal is always a task. The POSIX sigqueue() family of routines provides an alternative to the (UNIX) kill() family for sending signals. The important differences between the two are: - sigqueue() includes an application- specified value that is sent as part of the signal, one can use this value to supply whatever is useful. This value is of type sigval, the signal handler finds it in the si_value field of one of its arguments: a structure siginfo_t. The use of this feature is implemented in the exercise code. - sigqueue() enables the queuing of multiple signals. The kill() routine, by contrast, delivers only a single signal even if multiple signals arrive before the handler runs, in other words, signals may be lost. Note however that as with all resources there is a limitation on how many signals can be stored in the sigqueue() buffer. If a task sends a burst of signals this limit can easily be found. This system variable can however be changed, it is left as a challenge to the students to find out more about the POSIX queued signals. 1
2 1.2 Signal handlers Most signals are delivered asynchronously to the execution of a program. Therefore programs must be written to account for the unexpected occurrence of signals. Unlike Interrupt Service Routines (ISRs), a signal handler executes in the context of the interrupted task. Note that the task s signal handler is executed whatever the state of the task is, active or pended! In general, signal handlers should be handled as ISR s, no routine should be called that may cause blocking. Table 3.18 of the VxWorks Application Programmer s Guide 6.2 lists those few routine that is safe. The most important ones are logmsg(), msqqsend, semgive() except when mutual-exclusion semaphore, semflush(), a number of tasklib routines, tickset() and tickget(). semtake() is definitely not safe!! Anyway, it is a good idea to use logmsg() in all VxWorks programs since the task is identified in the output. 1.3 Communication between signal handler and task Due to the restrictions on system calls in a handler, see sect. 1.2, actions to be taken after a signal must in general be carried out in the task. Also, like in an ISR, the time spent in a handler should be as short as possible. But how can the signal handler notify its owner (task) that a signal has arrived? Possible methods are: - The handler can store the signal information in global variables and the task can poll on a flag that indicates when a signal has arrived. For several reasons this is a bad solution: 1) access of shared data requires mutual exclusion and semtake() is not safe in a handler, and 2) polling wastes CPU time. - The task can wait on a semaphore on which the handler execute a semgive() after a signal. However, in order that the task can fetch the signal information one is back to square 1) above. - POSIX / ANSI has the (strange) setjmp / longjmp (jmp_buf env) facility, see lecture. The structure jmp_buf contains some extra elements that can (I think) be used for information transfer from handler to the task. - typedef struct _jmp_buf { REG_SET reg; int exccnt; int extra[3]; } jmp_buf[1]; - The handler can send the information to the task over a message queue, as the msqqsend() is handler safe, see sect This is the method to be used in this exercise. 1.4 Signal system calls The use of these functions is well illustrated in the source code. It is referred to the VxWorks documentation for additional information. 2
3 1.4.1 Signal functions arguments The follow description of the siginfo_t structure is also commented into the RTlab_2 skeleton source code. /* The signal handler receives the value of the signal that has triggered the handler. * Additional, sigqueue( )can supply an application specified value to the handler * of type sigval (defined in "signal.h"); the signal handler finds it in the * si_value field of one of its arguments, a structure siginfo_t * * The data structure is as follows: typedef struct siginfo { int si_signo; int si_code; union sigval si_value; } siginfo_t; * sigval is defined in "sigeventcommon.h" union sigval { int sival_int; void *sival_ptr; }; */ How the value stored in sival_int is accessed see the source code C unions For those of you (like me) who are not very familiar with C unions here is a practical introduction that one can also run as is under VxWorks. /* A union is like a structure, except that each element shares the same memory. Thus in this example, the coords and about members overlap. Note that the setting of about[2] to 'X' CORRUPTS the float in this demonstration. In a practical use, a variable such as un_type (provided but not used in this example) would be set up to indicate which particular use is being made of the union */ typedef union { } assocdata; typedef struct { } leaf; int main() { float coords[3]; char about[20]; char *descript; int un_type; assocdata alsostuff; leaf oak[3]; int i; printf ("Hello World\n"); for (i=0; i<3; i++) { oak[i].descript = "A Greeting"; oak[i].un_type = 1; 3
4 oak[i].alsostuff.coords[0] = 3.14; } oak[2].alsostuff.about[2] = 'X'; return OK; } for (i=0; i<3; i++) { printf("%s\n",oak[i].descript); printf("%5.2f\n",oak[i].alsostuff.coords[0]); } /* Sample of output from this program Hello World A Greeting 3.14 A Greeting 3.14 A Greeting 3.39 */ OK, now you know how a union works. 1.5 Waking up a task by a signal If a task is PENDED (waiting for a resource) when a signal is sent to it, two things will take place: - The signal handler will be executed, and - The task is immediately taken out of the PENDED state, and will continue to execute once it gets access to the CPU. The second point is important, because it implies that if the task is for instance waiting in mq_receive( ) for a message or in semtake( ) for a semaphore, an immediate return from the system call with errno = EINTR will take place without receiving neither the message nor getting the semaphore! So, if the task/process continues in good faith without testing the return status then there is trouble waiting for it. 2 RTlab-2.c The source code which is the basis for the exercise is stored under \FYS4220\src\. It can also be downloaded from the FYS4220 home page. Although the code can be compiled without errors, but with a fair number of warnings, the program system is not complete. How to complete it (in one way or another) and thereby getting the exercise approved is defined in sect As for the ROBOT exercise the number of lines of code to be written is few. 2.1 Structure of RTlab 2.c The source code should be a pleasure to read, but here is a quick overview to guide the eyes. The overall structure mimics a general measurement system, with user control and monitoring, measuring tasks, and Alarm handling. 4
5 The start address is taskcontrol without parameters. It is recommended that taskcontrol is started from a Target shell such that the printout is not mixed up with the output from logmsg() which is routed to the VxSim terminal. The system is built with five VxWorks tasks: - The interactive command interpreter taskcontrol( ), which spawns the other tasks; - Alarm_task( ) which install its signal handler SignalHandler( ) and creates a message queue over which it shall receive messages from the handler; - tasktemperature( ), taskpressure( ) and taskposition ( ). Each of them reads data from an array with a randomized index, and tests the value against an error limit. If the limit is exceeded the tasks sends a signal to Alarm_task( ) that also includes the data value. In order to make the error rate more unpredictable the three tasks reads data at random intervals from 0 (zero) to 99 clock ticks, one tick is 16.7 ms. By decreasing the taskdelay ( ) random interval one can also test the robustness of the system. The code includes a number of global counters that can be used to collect statistics. 2.2 What to do 1. When triggered, SignalHandler( ) shall send the signal code and sigval (see sect ) parameter to Alarm_task( ) over a message queue. Implement status test after all message queue system calls. The code for this must be added to the SignalHandler( ) and Alarm_task( ) skeletons. 2. Demonstrate that the number of sent and received signals is identical. 3. Try to stress the system, this can for instance be done by sending a burst of SIGRT1/SIGRT2 signals from taskcontrol( ) or changing the taskdelay() period interval in the three measuring tasks Some help me please info An example of handling by Alarm_task( ) of the received information is already implemented in the code. According to the documentation only the VxWorks msqqsend( ) is permitted from a signal handler. The POSIX equivalent is mq_send( ). (Why this difference between msqqsend( ) and mq_send( ) I really don t know, because both can cause blocking if the non-blocking option has not been set.) Whatever, to profit from the message queue code in ROBOT one can use the POSIX calls. Blocking in the signal handler can be avoided by first testing for available buffers: if (msgqnummsgs((msg_q_id)mq_descriptor) < MQ_MSGMX-1) See also sect 1.5 As for the ROBOT exercise, a significant part of the job is to study the code. 5

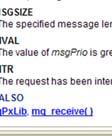

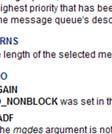

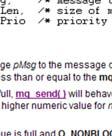
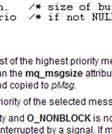
6 2.2.2 mq_send( ) and mq_receive( ) Reference pages 6






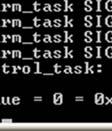
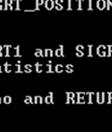



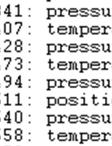
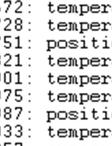
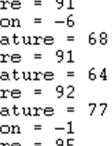
7 2.3 Outputt from a perfect system See Figure 1 and Figure 2 Figure 1 Shell output from taskcontrol( ) 7



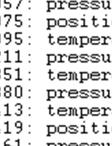
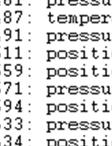
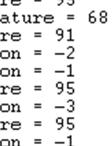

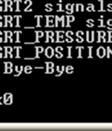
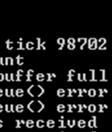
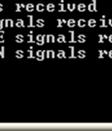
8 Figure 2 Terminal output from Alarm_task() 8
Lecture 3: Concurrency & Tasking
 Lecture 3: Concurrency & Tasking 1 Real time systems interact asynchronously with external entities and must cope with multiple threads of control and react to events - the executing programs need to share
Lecture 3: Concurrency & Tasking 1 Real time systems interact asynchronously with external entities and must cope with multiple threads of control and react to events - the executing programs need to share
Lecture 6: Real-Time Timing + Real-Time Objects
 Lecture 6: Real-Time Timing + Real-Time Objects 1 Lecture: RT Timing (30) Lab Exercise: Watchdog + auxiliary clock timers (25) Lecture: RT Objects-Events (15) Lab Exercise: Events (30) Project Work (rest
Lecture 6: Real-Time Timing + Real-Time Objects 1 Lecture: RT Timing (30) Lab Exercise: Watchdog + auxiliary clock timers (25) Lecture: RT Objects-Events (15) Lab Exercise: Events (30) Project Work (rest
Exceptions, Interrupts, and Timers
 Chapter 10 Exceptions, Interrupts, and Timers Tornado Training Workshop Copyright 10-1 xception Handling and Signals nterrupt Service Routines ystem Clock, Auxiliary Clock, Watchdog Timers Exceptions,
Chapter 10 Exceptions, Interrupts, and Timers Tornado Training Workshop Copyright 10-1 xception Handling and Signals nterrupt Service Routines ystem Clock, Auxiliary Clock, Watchdog Timers Exceptions,
Unix System Programming - Chapter 8
 Unix System Programming - Chapter 8 Neal Nelson The Evergreen State College Apr 2010 USP Chapter 8 - Signals Section 8.1 - Basic Signal Concepts Section 8.2 - Generating Signals Section 8.3 - Signal Masks
Unix System Programming - Chapter 8 Neal Nelson The Evergreen State College Apr 2010 USP Chapter 8 - Signals Section 8.1 - Basic Signal Concepts Section 8.2 - Generating Signals Section 8.3 - Signal Masks
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in : FYS4220/ FYS9220 Day of exam : 16. December 2010 Exam hours : 09.00 13.00 This examination paper consists of 6 page(s). Appendices:
Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in : FYS4220/ FYS9220 Day of exam : 16. December 2010 Exam hours : 09.00 13.00 This examination paper consists of 6 page(s). Appendices:
IMPLEMENTATION OF SIGNAL HANDLING. CS124 Operating Systems Fall , Lecture 15
 IMPLEMENTATION OF SIGNAL HANDLING CS124 Operating Systems Fall 2017-2018, Lecture 15 2 Signal Handling UNIX operating systems allow es to register for and handle signals Provides exceptional control flow
IMPLEMENTATION OF SIGNAL HANDLING CS124 Operating Systems Fall 2017-2018, Lecture 15 2 Signal Handling UNIX operating systems allow es to register for and handle signals Provides exceptional control flow
Shell Execution of Programs. Process Groups, Session and Signals 1
 Shell Execution of Programs Process Groups, Session and Signals 1 Signal Concepts Signals are a way for a process to be notified of asynchronous events (software interrupts). Some examples: a timer you
Shell Execution of Programs Process Groups, Session and Signals 1 Signal Concepts Signals are a way for a process to be notified of asynchronous events (software interrupts). Some examples: a timer you
The Kernel Abstraction
 The Kernel Abstraction Debugging as Engineering Much of your time in this course will be spent debugging In industry, 50% of software dev is debugging Even more for kernel development How do you reduce
The Kernel Abstraction Debugging as Engineering Much of your time in this course will be spent debugging In industry, 50% of software dev is debugging Even more for kernel development How do you reduce
Operating Systems 2010/2011
 Operating Systems 2010/2011 Signals Johan Lukkien 1 Signals A signal is a software generated event notification of state change encapsulation of physical event usually: sent from a process to a process
Operating Systems 2010/2011 Signals Johan Lukkien 1 Signals A signal is a software generated event notification of state change encapsulation of physical event usually: sent from a process to a process
Chapter 8: I/O functions & socket options
 Chapter 8: I/O functions & socket options 8.1 Introduction I/O Models In general, there are normally two phases for an input operation: 1) Waiting for the data to arrive on the network. When the packet
Chapter 8: I/O functions & socket options 8.1 Introduction I/O Models In general, there are normally two phases for an input operation: 1) Waiting for the data to arrive on the network. When the packet
Semaphores. Chapter. verview inary Semaphores for Task Synchronization utex Semaphores to Solve Mutual Exclusion Problems
 Chapter 7 Semaphores Tornado Training Workshop Copyright 7-1 verview inary Semaphores for Task Synchronization utex Semaphores to Solve Mutual Exclusion Problems 7.1 Overview Semaphores Binary Semaphores
Chapter 7 Semaphores Tornado Training Workshop Copyright 7-1 verview inary Semaphores for Task Synchronization utex Semaphores to Solve Mutual Exclusion Problems 7.1 Overview Semaphores Binary Semaphores
Overview. Administrative. * HW 1 grades. * HW 2 Due. Topics. * 5.1 What is a Signal? * Dealing with Signals - masks, handlers
 Overview Administrative * HW 1 grades * HW 2 Due Topics * 5.1 What is a Signal? * 5.2-3 Dealing with Signals - masks, handlers * 5.4 Synchronization: pause(), sigsuspend() * 5.6 Interaction with other
Overview Administrative * HW 1 grades * HW 2 Due Topics * 5.1 What is a Signal? * 5.2-3 Dealing with Signals - masks, handlers * 5.4 Synchronization: pause(), sigsuspend() * 5.6 Interaction with other
Lecture 4: Real Time Semaphores
 Lecture 4: Real Time Semaphores 1 Lab work (20 min) Configuring VxWorks Kernel VxWorks Hostshell 09/19/2015 Quiz Solution (10) Quiz (15) Lecture Synchronization and Semaphores (45) Lab exercise Binary
Lecture 4: Real Time Semaphores 1 Lab work (20 min) Configuring VxWorks Kernel VxWorks Hostshell 09/19/2015 Quiz Solution (10) Quiz (15) Lecture Synchronization and Semaphores (45) Lab exercise Binary
CS 378 (Spring 2003)
") Department of Computer Sciences THE UNIVERSITY OF TEXAS AT AUSTIN CS 378 (Spring 2003) Linux Kernel Programming Yongguang Zhang (ygz@cs.utexas.edu) Copyright 2003, Yongguang Zhang This Lecture Interprocess
Department of Computer Sciences THE UNIVERSITY OF TEXAS AT AUSTIN CS 378 (Spring 2003) Linux Kernel Programming Yongguang Zhang (ygz@cs.utexas.edu) Copyright 2003, Yongguang Zhang This Lecture Interprocess
EE458 - Embedded Systems Lecture 8 Semaphores
 EE458 - Embedded Systems Lecture 8 Semaphores Outline Introduction to Semaphores Binary and Counting Semaphores Mutexes Typical Applications RTEMS Semaphores References RTC: Chapter 6 CUG: Chapter 9 1
EE458 - Embedded Systems Lecture 8 Semaphores Outline Introduction to Semaphores Binary and Counting Semaphores Mutexes Typical Applications RTEMS Semaphores References RTC: Chapter 6 CUG: Chapter 9 1
Signals, Synchronization. CSCI 3753 Operating Systems Spring 2005 Prof. Rick Han
 , Synchronization CSCI 3753 Operating Systems Spring 2005 Prof. Rick Han Announcements Program Assignment #1 due Tuesday Feb. 15 at 11:55 pm TA will explain parts b-d in recitation Read chapters 7 and
, Synchronization CSCI 3753 Operating Systems Spring 2005 Prof. Rick Han Announcements Program Assignment #1 due Tuesday Feb. 15 at 11:55 pm TA will explain parts b-d in recitation Read chapters 7 and
Start of Lecture on January 20, Chapter 3: Processes
 Start of Lecture on January 20, 2014 1 Reminders Exercise 1 is due in the morning before class on Wed Don t forget about Assignment 1 What are your questions or comments? 2 Shared memory versus Message
Start of Lecture on January 20, 2014 1 Reminders Exercise 1 is due in the morning before class on Wed Don t forget about Assignment 1 What are your questions or comments? 2 Shared memory versus Message
Lecture 9: Real-Time Software Design Issues
 Lecture 9: Real-Time Software Design Issues 1 System engineering Characteristics of software-intensive systems Requirements vs. design Modularization: cohesion and coupling Development hints: timing, data,
Lecture 9: Real-Time Software Design Issues 1 System engineering Characteristics of software-intensive systems Requirements vs. design Modularization: cohesion and coupling Development hints: timing, data,
Embedded Systems Programming
 Embedded Systems Programming Overrun Management (Module 23) Yann-Hang Lee Arizona State University yhlee@asu.edu (480) 727-7507 Summer 2014 Imprecise computation Overrun Management trades off precision
Embedded Systems Programming Overrun Management (Module 23) Yann-Hang Lee Arizona State University yhlee@asu.edu (480) 727-7507 Summer 2014 Imprecise computation Overrun Management trades off precision
Interprocess Communication
 Interprocess Communication Reading: Silberschatz chapter 4 Additional Reading: Stallings chapter 6 EEL 358 1 Outline Introduction Shared memory systems POSIX shared memory Message passing systems Direct
Interprocess Communication Reading: Silberschatz chapter 4 Additional Reading: Stallings chapter 6 EEL 358 1 Outline Introduction Shared memory systems POSIX shared memory Message passing systems Direct
KING FAHD UNIVERSITY OF PETROLEUM AND MINERALS Information and Computer Science Department ICS 431 Operating Systems Lab # 6
 Objective: KING FAHD UNIVERSITY OF PETROLEUM AND MINERALS Information and Computer Science Department ICS 431 Operating Systems Lab # 6 Inter-Process Communication (IPC) using Signals Now that we know
Objective: KING FAHD UNIVERSITY OF PETROLEUM AND MINERALS Information and Computer Science Department ICS 431 Operating Systems Lab # 6 Inter-Process Communication (IPC) using Signals Now that we know
Embedded Software Programming
 Embedded Software Programming Computer Science & Engineering Department Arizona State University Tempe, AZ 85287 Dr. Yann-Hang Lee yhlee@asu.edu (480) 727-7507 Event and Time-Driven Threads taskspawn (name,
Embedded Software Programming Computer Science & Engineering Department Arizona State University Tempe, AZ 85287 Dr. Yann-Hang Lee yhlee@asu.edu (480) 727-7507 Event and Time-Driven Threads taskspawn (name,
Processes. Processes (cont d)
") Processes UNIX process creation image-file arg1 arg2 Shell command line example ls -l Equivalent to /bin/ls -l Why? How do you find out where the image file is? Background processes ls -l & Execute a process
Processes UNIX process creation image-file arg1 arg2 Shell command line example ls -l Equivalent to /bin/ls -l Why? How do you find out where the image file is? Background processes ls -l & Execute a process
Experiment #3 Semaphores
 Experiment #3 Semaphores Introduction Semaphores permit multitasking applications to coordinate their activities. The most obvious way for tasks to communicate is via various shared data structures. Because
Experiment #3 Semaphores Introduction Semaphores permit multitasking applications to coordinate their activities. The most obvious way for tasks to communicate is via various shared data structures. Because
CPSC 341 OS & Networks. Processes. Dr. Yingwu Zhu
 CPSC 341 OS & Networks Processes Dr. Yingwu Zhu Process Concept Process a program in execution What is not a process? -- program on a disk A process is an active object, but a program is just a file It
CPSC 341 OS & Networks Processes Dr. Yingwu Zhu Process Concept Process a program in execution What is not a process? -- program on a disk A process is an active object, but a program is just a file It
Real-Time and Concurrent Programming Lecture 4 (F4): Monitors: synchronized, wait and notify
: Monitors: synchronized, wait and notify") http://cs.lth.se/eda040 Real-Time and Concurrent Programming Lecture 4 (F4): Monitors: synchronized, wait and notify Klas Nilsson 2016-09-20 http://cs.lth.se/eda040 F4: Monitors: synchronized, wait and
http://cs.lth.se/eda040 Real-Time and Concurrent Programming Lecture 4 (F4): Monitors: synchronized, wait and notify Klas Nilsson 2016-09-20 http://cs.lth.se/eda040 F4: Monitors: synchronized, wait and
Computer Systems Assignment 2: Fork and Threads Package
 Autumn Term 2018 Distributed Computing Computer Systems Assignment 2: Fork and Threads Package Assigned on: October 5, 2018 Due by: October 12, 2018 1 Understanding fork() and exec() Creating new processes
Autumn Term 2018 Distributed Computing Computer Systems Assignment 2: Fork and Threads Package Assigned on: October 5, 2018 Due by: October 12, 2018 1 Understanding fork() and exec() Creating new processes
Signals. CSC209: Software Tools and Systems Programming. Furkan Alaca & Paul Vrbik
 Signals CSC209: Software Tools and Systems Programming Furkan Alaca & Paul Vrbik University of Toronto Mississauga https://mcs.utm.utoronto.ca/~209/ Week 9 Acknowledgement These slides are built upon material
Signals CSC209: Software Tools and Systems Programming Furkan Alaca & Paul Vrbik University of Toronto Mississauga https://mcs.utm.utoronto.ca/~209/ Week 9 Acknowledgement These slides are built upon material
Asynchronous Events on Linux
 Asynchronous Events on Linux Frederic.Rossi@Ericsson.CA Open System Lab Systems Research June 25, 2002 Ericsson Research Canada Introduction Linux performs well as a general purpose OS but doesn t satisfy
Asynchronous Events on Linux Frederic.Rossi@Ericsson.CA Open System Lab Systems Research June 25, 2002 Ericsson Research Canada Introduction Linux performs well as a general purpose OS but doesn t satisfy
CEC 450 Real-Time Systems
 CEC 450 Real-Time Systems Lecture 7 Review October 9, 2017 Sam Siewert Coming Next Finish Up with Recount of Mars Pathfinder and Unbounded Priority Inversion Mike Jone s Page (Microsoft) Glenn Reeves on
CEC 450 Real-Time Systems Lecture 7 Review October 9, 2017 Sam Siewert Coming Next Finish Up with Recount of Mars Pathfinder and Unbounded Priority Inversion Mike Jone s Page (Microsoft) Glenn Reeves on
an infinite loop Processes and Exceptions doing nothing on a busy system timing nothing
 an infinite loop Processes and Exceptions int main(void) { while (1) { /* waste CPU time */ If I run this on a lab machine, can you still use it? even if the machine only has one core? 1 2 timing nothing
an infinite loop Processes and Exceptions int main(void) { while (1) { /* waste CPU time */ If I run this on a lab machine, can you still use it? even if the machine only has one core? 1 2 timing nothing
6/20/2018. Lecture 2: Platforms & RTOS. Outline. Lab Setup (20 min) Labs work. Lecture: Platform + RTOS
 Labs work. Lecture: Platform + RTOS") Lecture 2: Platforms & RTOS 1 Outline Lab Setup (20 min) Labs work Workbench + vxworks Documentations (15 min) Project Management (25 min) Host Shell (25 min) Lecture: Platform + RTOS 2 1 3 Microcomputer
Lecture 2: Platforms & RTOS 1 Outline Lab Setup (20 min) Labs work Workbench + vxworks Documentations (15 min) Project Management (25 min) Host Shell (25 min) Lecture: Platform + RTOS 2 1 3 Microcomputer
Mechatronics Laboratory Assignment 2 Serial Communication DSP Time-Keeping, Visual Basic, LCD Screens, and Wireless Networks
 Mechatronics Laboratory Assignment 2 Serial Communication DSP Time-Keeping, Visual Basic, LCD Screens, and Wireless Networks Goals for this Lab Assignment: 1. Introduce the VB environment for PC-based
Mechatronics Laboratory Assignment 2 Serial Communication DSP Time-Keeping, Visual Basic, LCD Screens, and Wireless Networks Goals for this Lab Assignment: 1. Introduce the VB environment for PC-based
Chapter 5 - Input / Output
 Chapter 5 - Input / Output Luis Tarrataca luis.tarrataca@gmail.com CEFET-RJ L. Tarrataca Chapter 5 - Input / Output 1 / 90 1 Motivation 2 Principle of I/O Hardware I/O Devices Device Controllers Memory-Mapped
Chapter 5 - Input / Output Luis Tarrataca luis.tarrataca@gmail.com CEFET-RJ L. Tarrataca Chapter 5 - Input / Output 1 / 90 1 Motivation 2 Principle of I/O Hardware I/O Devices Device Controllers Memory-Mapped
Multiprogramming. Evolution of OS. Today. Comp 104: Operating Systems Concepts 28/01/2013. Processes Management Scheduling & Resource Allocation
 Comp 104: Operating Systems Concepts Management Scheduling & Resource Allocation Today OS evolution Introduction to processes OS structure 1 2 Evolution of OS Largely driven by desire to do something useful
Comp 104: Operating Systems Concepts Management Scheduling & Resource Allocation Today OS evolution Introduction to processes OS structure 1 2 Evolution of OS Largely driven by desire to do something useful
Multitasking. Programmer s model of multitasking. fork() spawns new process. exit() terminates own process
 spawns new process. exit() terminates own process") Signals Prof. Jin-Soo Kim( jinsookim@skku.edu) TA JinHong Kim( jinhong.kim@csl.skku.edu) Computer Systems Laboratory Sungkyunkwan University http://csl.skku.edu Multitasking Programmer s model of multitasking
Signals Prof. Jin-Soo Kim( jinsookim@skku.edu) TA JinHong Kim( jinhong.kim@csl.skku.edu) Computer Systems Laboratory Sungkyunkwan University http://csl.skku.edu Multitasking Programmer s model of multitasking
Lecture 20. Log into Linux. Copy directory /home/hwang/cs375/lecture20 Project 5 due today. Project 6 posted, due Tuesday, April 8. Questions?
 Lecture 20 Log into Linux. Copy directory /home/hwang/cs375/lecture20 Project 5 due today. Project 6 posted, due Tuesday, April 8. Questions? Thursday, March 27 CS 375 UNIX System Programming - Lecture
Lecture 20 Log into Linux. Copy directory /home/hwang/cs375/lecture20 Project 5 due today. Project 6 posted, due Tuesday, April 8. Questions? Thursday, March 27 CS 375 UNIX System Programming - Lecture
Computer architecture. A simplified model
 Computer architecture A simplified model Computers architecture One (or several) CPU(s) Main memory A set of devices (peripherals) Interrupts Direct memory access Computers architecture Memory Keyboard
Computer architecture A simplified model Computers architecture One (or several) CPU(s) Main memory A set of devices (peripherals) Interrupts Direct memory access Computers architecture Memory Keyboard
Overview. Administrative. * HW 2 Grades. * HW 3 Due. Topics: * What are Threads? * Motivating Example : Async. Read() * POSIX Threads
 * POSIX Threads") Overview Administrative * HW 2 Grades * HW 3 Due Topics: * What are Threads? * Motivating Example : Async. Read() * POSIX Threads * Basic Thread Management * User vs. Kernel Threads * Thread Attributes
Overview Administrative * HW 2 Grades * HW 3 Due Topics: * What are Threads? * Motivating Example : Async. Read() * POSIX Threads * Basic Thread Management * User vs. Kernel Threads * Thread Attributes
Programming Assignments will be.. All the PAs are continuous 3 major factors that you should consider
 Signals Prof. Jin-Soo Kim( jinsookim@skku.edu) TA - Dong-Yun Lee (dylee@csl.skku.edu) Computer Systems Laboratory Sungkyunkwan University http://csl.skku.edu NOTICE Programming Assignments will be.. All
Signals Prof. Jin-Soo Kim( jinsookim@skku.edu) TA - Dong-Yun Lee (dylee@csl.skku.edu) Computer Systems Laboratory Sungkyunkwan University http://csl.skku.edu NOTICE Programming Assignments will be.. All
CS213. Exceptional Control Flow Part II. Topics Process Hierarchy Signals
 CS213 Exceptional Control Flow Part II Topics Process Hierarchy Signals ECF Exists at All Levels of a System Exceptions Hardware and operating system kernel software Concurrent processes Hardware timer
CS213 Exceptional Control Flow Part II Topics Process Hierarchy Signals ECF Exists at All Levels of a System Exceptions Hardware and operating system kernel software Concurrent processes Hardware timer
Interrupts Peter Rounce
 Interrupts Peter Rounce P.Rounce@cs.ucl.ac.uk 22/11/2011 11-GC03 Interrupts 1 INTERRUPTS An interrupt is a signal to the CPU from hardware external to the CPU that indicates than some event has occured,
Interrupts Peter Rounce P.Rounce@cs.ucl.ac.uk 22/11/2011 11-GC03 Interrupts 1 INTERRUPTS An interrupt is a signal to the CPU from hardware external to the CPU that indicates than some event has occured,
Computer Science 322 Operating Systems Mount Holyoke College Spring Topic Notes: C and Unix Overview
 Computer Science 322 Operating Systems Mount Holyoke College Spring 2010 Topic Notes: C and Unix Overview This course is about operating systems, but since most of our upcoming programming is in C on a
Computer Science 322 Operating Systems Mount Holyoke College Spring 2010 Topic Notes: C and Unix Overview This course is about operating systems, but since most of our upcoming programming is in C on a
CSci 4061 Introduction to Operating Systems. (Advanced Control Signals)
") CSci 4061 Introduction to Operating Systems (Advanced Control Signals) What is a Signal? Signals are a form of asynchronous IPC Earlier: Non-blocking I/O and check if it has happened => polling Problem
CSci 4061 Introduction to Operating Systems (Advanced Control Signals) What is a Signal? Signals are a form of asynchronous IPC Earlier: Non-blocking I/O and check if it has happened => polling Problem
BLM2031 Structured Programming. Zeyneb KURT
 BLM2031 Structured Programming Zeyneb KURT 1 Contact Contact info office : D-219 e-mail zeynebkurt@gmail.com, zeyneb@ce.yildiz.edu.tr When to contact e-mail first, take an appointment What to expect help
BLM2031 Structured Programming Zeyneb KURT 1 Contact Contact info office : D-219 e-mail zeynebkurt@gmail.com, zeyneb@ce.yildiz.edu.tr When to contact e-mail first, take an appointment What to expect help
Computer System Architecture. CMPT 300 Operating Systems I. Summer Segment 3: Computer System Architecture. Melissa O Neill
 CMPT 300 Operating Systems I Computer System Architecture Summer 1999 disk disk printer tape drives on-line Segment 3: Computer System Architecture CPU disk controller printer controller tape-drive controller
CMPT 300 Operating Systems I Computer System Architecture Summer 1999 disk disk printer tape drives on-line Segment 3: Computer System Architecture CPU disk controller printer controller tape-drive controller
Definition: An operating system is the software that manages resources
 13-1 Operating Systems 13-1 Definition: An operating system is the software that manages resources in a computer. Resources A resource is (usually) hardware that needs to be accessed. There are rules for
13-1 Operating Systems 13-1 Definition: An operating system is the software that manages resources in a computer. Resources A resource is (usually) hardware that needs to be accessed. There are rules for
Interrupts Peter Rounce - room 6.18
 Interrupts Peter Rounce - room 6.18 P.Rounce@cs.ucl.ac.uk 20/11/2006 1001 Interrupts 1 INTERRUPTS An interrupt is a signal to the CPU from hardware external to the CPU that indicates than some event has
Interrupts Peter Rounce - room 6.18 P.Rounce@cs.ucl.ac.uk 20/11/2006 1001 Interrupts 1 INTERRUPTS An interrupt is a signal to the CPU from hardware external to the CPU that indicates than some event has
CSE306 - Homework2 and Solutions
 CSE306 - Homework2 and Solutions Note: your solutions must contain enough information to enable the instructor to judge whether you understand the material or not. Simple yes/no answers do not count. A
CSE306 - Homework2 and Solutions Note: your solutions must contain enough information to enable the instructor to judge whether you understand the material or not. Simple yes/no answers do not count. A
The control of I/O devices is a major concern for OS designers
 Lecture Overview I/O devices I/O hardware Interrupts Direct memory access Device dimensions Device drivers Kernel I/O subsystem Operating Systems - June 26, 2001 I/O Device Issues The control of I/O devices
Lecture Overview I/O devices I/O hardware Interrupts Direct memory access Device dimensions Device drivers Kernel I/O subsystem Operating Systems - June 26, 2001 I/O Device Issues The control of I/O devices
Signals are a kernel-supported mechanism for reporting events to user code and forcing a response to them. There are actually two sorts of such
 Signals are a kernel-supported mechanism for reporting events to user code and forcing a response to them. There are actually two sorts of such events, to which we sometimes refer as exceptions and interrupts.
Signals are a kernel-supported mechanism for reporting events to user code and forcing a response to them. There are actually two sorts of such events, to which we sometimes refer as exceptions and interrupts.
Q.1 Explain Computer s Basic Elements
 Q.1 Explain Computer s Basic Elements Ans. At a top level, a computer consists of processor, memory, and I/O components, with one or more modules of each type. These components are interconnected in some
Q.1 Explain Computer s Basic Elements Ans. At a top level, a computer consists of processor, memory, and I/O components, with one or more modules of each type. These components are interconnected in some
Real Time Operating System: Inter-Process Communication (IPC)
") ECE3411 Fall 2015 Lecture 6c. Real Time Operating System: Inter-Process Communication (IPC) Marten van Dijk, Syed Kamran Haider Department of Electrical & Computer Engineering University of Connecticut
ECE3411 Fall 2015 Lecture 6c. Real Time Operating System: Inter-Process Communication (IPC) Marten van Dijk, Syed Kamran Haider Department of Electrical & Computer Engineering University of Connecticut
Embedded Systems. 5. Operating Systems. Lothar Thiele. Computer Engineering and Networks Laboratory
 Embedded Systems 5. Operating Systems Lothar Thiele Computer Engineering and Networks Laboratory Embedded Operating Systems 5 2 Embedded Operating System (OS) Why an operating system (OS) at all? Same
Embedded Systems 5. Operating Systems Lothar Thiele Computer Engineering and Networks Laboratory Embedded Operating Systems 5 2 Embedded Operating System (OS) Why an operating system (OS) at all? Same
Operating Systems. Introduction & Overview. Outline for today s lecture. Administrivia. ITS 225: Operating Systems. Lecture 1
 ITS 225: Operating Systems Operating Systems Lecture 1 Introduction & Overview Jan 15, 2004 Dr. Matthew Dailey Information Technology Program Sirindhorn International Institute of Technology Thammasat
ITS 225: Operating Systems Operating Systems Lecture 1 Introduction & Overview Jan 15, 2004 Dr. Matthew Dailey Information Technology Program Sirindhorn International Institute of Technology Thammasat
CPSC 213. Introduction to Computer Systems. I/O Devices, Interrupts and DMA. Unit 2a Oct 27, 29, 31. Winter Session 2014, Term 1
 CPSC 213 Introduction to Computer Systems Winter Session 2014, Term 1 Unit 2a Oct 27, 29, 31 I/O Devices, Interrupts and DMA Overview Reading in Text 8.1, 8.2.1, 8.5.1-8.5.3 Learning Goals Explain what
CPSC 213 Introduction to Computer Systems Winter Session 2014, Term 1 Unit 2a Oct 27, 29, 31 I/O Devices, Interrupts and DMA Overview Reading in Text 8.1, 8.2.1, 8.5.1-8.5.3 Learning Goals Explain what
13-2 EE 4770 Lecture Transparency. Formatted 8:18, 13 March 1998 from lsli
 13-1 13-1 Operating Systems Definition: An operating system is the software that manages resources in a computer. Resources A resource is (usually) hardware that needs to be accessed. There are rules for
13-1 13-1 Operating Systems Definition: An operating system is the software that manages resources in a computer. Resources A resource is (usually) hardware that needs to be accessed. There are rules for
CSE 421: Introduction to Operating Systems
 Recitation 5: UNIX Signals University at Buffalo, the State University of New York October 2, 2013 About Me 4th year PhD student But TA first time From South Korea Today, We will study... What UNIX signals
Recitation 5: UNIX Signals University at Buffalo, the State University of New York October 2, 2013 About Me 4th year PhD student But TA first time From South Korea Today, We will study... What UNIX signals
System Calls and Signals: Communication with the OS. System Call. strace./hello. Kernel. Context Switch
 System Calls and Signals: Communication with the OS Jonathan Misurda jmisurda@cs.pitt.edu System Call An operation (function) that an OS provides for running applications to use CS 1550 2077 strace./hello
System Calls and Signals: Communication with the OS Jonathan Misurda jmisurda@cs.pitt.edu System Call An operation (function) that an OS provides for running applications to use CS 1550 2077 strace./hello
ECEN 449 Microprocessor System Design. Hardware-Software Communication. Texas A&M University
 ECEN 449 Microprocessor System Design Hardware-Software Communication 1 Objectives of this Lecture Unit Learn basics of Hardware-Software communication Memory Mapped I/O Polling/Interrupts 2 Motivation
ECEN 449 Microprocessor System Design Hardware-Software Communication 1 Objectives of this Lecture Unit Learn basics of Hardware-Software communication Memory Mapped I/O Polling/Interrupts 2 Motivation
Some Notes on R Event Handling
 Some Notes on R Event Handling Luke Tierney Statistics and Actuatial Science University of Iowa December 9, 2003 1 Some Things that Do Not Work Here is a non-exhaustive list of a few issues I know about.
Some Notes on R Event Handling Luke Tierney Statistics and Actuatial Science University of Iowa December 9, 2003 1 Some Things that Do Not Work Here is a non-exhaustive list of a few issues I know about.
REAL-TIME OPERATING SYSTEMS SHORT OVERVIEW
 Faculty of Computer Science Institute of Systems Architecture, Operating Systems Group REAL-TIME OPERATING SYSTEMS SHORT OVERVIEW HERMANN HÄRTIG, WS 2017/18 OUTLINE Basic Variants of Real-Time Operating
Faculty of Computer Science Institute of Systems Architecture, Operating Systems Group REAL-TIME OPERATING SYSTEMS SHORT OVERVIEW HERMANN HÄRTIG, WS 2017/18 OUTLINE Basic Variants of Real-Time Operating
* What are the different states for a task in an OS?
 * Kernel, Services, Libraries, Application: define the 4 terms, and their roles. The kernel is a computer program that manages input/output requests from software, and translates them into data processing
* Kernel, Services, Libraries, Application: define the 4 terms, and their roles. The kernel is a computer program that manages input/output requests from software, and translates them into data processing
REVIEW OF COMMONLY USED DATA STRUCTURES IN OS
 REVIEW OF COMMONLY USED DATA STRUCTURES IN OS NEEDS FOR EFFICIENT DATA STRUCTURE Storage complexity & Computation complexity matter Consider the problem of scheduling tasks according to their priority
REVIEW OF COMMONLY USED DATA STRUCTURES IN OS NEEDS FOR EFFICIENT DATA STRUCTURE Storage complexity & Computation complexity matter Consider the problem of scheduling tasks according to their priority
Workshop on Inter Process Communication Solutions
 Solutions 1 Background Threads can share information with each other quite easily (if they belong to the same process), since they share the same memory space. But processes have totally isolated memory
Solutions 1 Background Threads can share information with each other quite easily (if they belong to the same process), since they share the same memory space. But processes have totally isolated memory
A read or write being atomic means that its effect is as if it happens instantaneously.
 A read or write being atomic means that its effect is as if it happens instantaneously. Signals are a kernel-supported mechanism for reporting events to user code and forcing a response to them. There
A read or write being atomic means that its effect is as if it happens instantaneously. Signals are a kernel-supported mechanism for reporting events to user code and forcing a response to them. There
CS A320 Operating Systems for Engineers
 CS A320 Operating Systems for Engineers Lecture 4 Conclusion of MOS Chapter 2 September 18, 2013 Sam Siewert Many Ways to Schedule a CPU Core We ve Come a Long way Since Batch Scheduling Sam Siewert 2
CS A320 Operating Systems for Engineers Lecture 4 Conclusion of MOS Chapter 2 September 18, 2013 Sam Siewert Many Ways to Schedule a CPU Core We ve Come a Long way Since Batch Scheduling Sam Siewert 2
CS24: INTRODUCTION TO COMPUTING SYSTEMS. Spring 2018 Lecture 20
 CS24: INTRODUCTION TO COMPUTING SYSTEMS Spring 2018 Lecture 20 LAST TIME: UNIX PROCESS MODEL Began covering the UNIX process model and API Information associated with each process: A PID (process ID) to
CS24: INTRODUCTION TO COMPUTING SYSTEMS Spring 2018 Lecture 20 LAST TIME: UNIX PROCESS MODEL Began covering the UNIX process model and API Information associated with each process: A PID (process ID) to
Lecture Topics. Announcements. Today: Operating System Overview (Stallings, chapter , ) Next: Processes (Stallings, chapter
 Next: Processes (Stallings, chapter") Lecture Topics Today: Operating System Overview (Stallings, chapter 2.1-2.4, 2.8-2.10) Next: Processes (Stallings, chapter 3.1-3.6) 1 Announcements Consulting hours posted Self-Study Exercise #3 posted
Lecture Topics Today: Operating System Overview (Stallings, chapter 2.1-2.4, 2.8-2.10) Next: Processes (Stallings, chapter 3.1-3.6) 1 Announcements Consulting hours posted Self-Study Exercise #3 posted
CSE 153 Design of Operating Systems
 CSE 153 Design of Operating Systems Winter 19 Lecture 3: OS model and Architectural Support Last time/today Historic evolution of Operating Systems (and computing!) Today: We start our journey in exploring
CSE 153 Design of Operating Systems Winter 19 Lecture 3: OS model and Architectural Support Last time/today Historic evolution of Operating Systems (and computing!) Today: We start our journey in exploring
Faculty of Electrical Engineering, Mathematics, and Computer Science Delft University of Technology
 Faculty of Electrical Engineering, Mathematics, and Computer Science Delft University of Technology exam Embedded Software TI2726-B January 28, 2019 13.30-15.00 This exam (6 pages) consists of 60 True/False
Faculty of Electrical Engineering, Mathematics, and Computer Science Delft University of Technology exam Embedded Software TI2726-B January 28, 2019 13.30-15.00 This exam (6 pages) consists of 60 True/False
Lecture 3. Introduction to Real-Time kernels. Real-Time Systems
 Real-Time Systems Lecture 3 Introduction to Real-Time kernels Task States Generic architecture of Real-Time kernels Typical structures and functions of Real-Time kernels Last lecture (2) Computational
Real-Time Systems Lecture 3 Introduction to Real-Time kernels Task States Generic architecture of Real-Time kernels Typical structures and functions of Real-Time kernels Last lecture (2) Computational
OPERATING SYSTEMS CS136
 OPERATING SYSTEMS CS136 Jialiang LU Jialiang.lu@sjtu.edu.cn Based on Lecture Notes of Tanenbaum, Modern Operating Systems 3 e, 1 Chapter 5 INPUT/OUTPUT 2 Overview o OS controls I/O devices => o Issue commands,
OPERATING SYSTEMS CS136 Jialiang LU Jialiang.lu@sjtu.edu.cn Based on Lecture Notes of Tanenbaum, Modern Operating Systems 3 e, 1 Chapter 5 INPUT/OUTPUT 2 Overview o OS controls I/O devices => o Issue commands,
Programming with MPI
 Programming with MPI p. 1/?? Programming with MPI Miscellaneous Guidelines Nick Maclaren Computing Service nmm1@cam.ac.uk, ext. 34761 March 2010 Programming with MPI p. 2/?? Summary This is a miscellaneous
Programming with MPI p. 1/?? Programming with MPI Miscellaneous Guidelines Nick Maclaren Computing Service nmm1@cam.ac.uk, ext. 34761 March 2010 Programming with MPI p. 2/?? Summary This is a miscellaneous
Chapter 3: Process-Concept. Operating System Concepts 8 th Edition,
 Chapter 3: Process-Concept, Silberschatz, Galvin and Gagne 2009 Chapter 3: Process-Concept Process Concept Process Scheduling Operations on Processes Interprocess Communication 3.2 Silberschatz, Galvin
Chapter 3: Process-Concept, Silberschatz, Galvin and Gagne 2009 Chapter 3: Process-Concept Process Concept Process Scheduling Operations on Processes Interprocess Communication 3.2 Silberschatz, Galvin
Process Coordination and Shared Data
 Process Coordination and Shared Data Lecture 19 In These Notes... Sharing data safely When multiple threads/processes interact in a system, new species of bugs arise 1. Compiler tries to save time by not
Process Coordination and Shared Data Lecture 19 In These Notes... Sharing data safely When multiple threads/processes interact in a system, new species of bugs arise 1. Compiler tries to save time by not
Programming with MPI
 Programming with MPI p. 1/?? Programming with MPI Miscellaneous Guidelines Nick Maclaren nmm1@cam.ac.uk March 2010 Programming with MPI p. 2/?? Summary This is a miscellaneous set of practical points Over--simplifies
Programming with MPI p. 1/?? Programming with MPI Miscellaneous Guidelines Nick Maclaren nmm1@cam.ac.uk March 2010 Programming with MPI p. 2/?? Summary This is a miscellaneous set of practical points Over--simplifies
Process. Discussion session 3 1/30/2016
 Process Discussion session 3 1/30/2016 A program in execution What is the process? An instance of a program running on a computer The entity can be assigned to and executed on a processor A unit of activity
Process Discussion session 3 1/30/2016 A program in execution What is the process? An instance of a program running on a computer The entity can be assigned to and executed on a processor A unit of activity
Signals. Jin-Soo Kim Computer Systems Laboratory Sungkyunkwan University
 Signals Jin-Soo Kim (jinsookim@skku.edu) Computer Systems Laboratory Sungkyunkwan University http://csl.skku.edu Multitasking (1) Programmer s model of multitasking fork() spawns new process Called once,
Signals Jin-Soo Kim (jinsookim@skku.edu) Computer Systems Laboratory Sungkyunkwan University http://csl.skku.edu Multitasking (1) Programmer s model of multitasking fork() spawns new process Called once,
Memory Consistency Models
 Memory Consistency Models Contents of Lecture 3 The need for memory consistency models The uniprocessor model Sequential consistency Relaxed memory models Weak ordering Release consistency Jonas Skeppstedt
Memory Consistency Models Contents of Lecture 3 The need for memory consistency models The uniprocessor model Sequential consistency Relaxed memory models Weak ordering Release consistency Jonas Skeppstedt
Outline. Introduction. Survey of Device Driver Management in Real-Time Operating Systems
 Survey of Device Driver Management in Real-Time Operating Systems Sebastian Penner +46705-396120 sebastian.penner@home.se 1 Outline Introduction What is a device driver? Commercial systems General Description
Survey of Device Driver Management in Real-Time Operating Systems Sebastian Penner +46705-396120 sebastian.penner@home.se 1 Outline Introduction What is a device driver? Commercial systems General Description
CS A331 Programming Language Concepts
 CS A331 Programming Language Concepts Lecture 12 Alternative Language Examples (General Concurrency Issues and Concepts) March 30, 2014 Sam Siewert Major Concepts Concurrent Processing Processes, Tasks,
CS A331 Programming Language Concepts Lecture 12 Alternative Language Examples (General Concurrency Issues and Concepts) March 30, 2014 Sam Siewert Major Concepts Concurrent Processing Processes, Tasks,
Real-Time Systems Hermann Härtig Real-Time Operating Systems Brief Overview
 Real-Time Systems Hermann Härtig Real-Time Operating Systems Brief Overview 02/02/12 Outline Introduction Basic variants of RTOSes Real-Time paradigms Common requirements for all RTOSes High level resources
Real-Time Systems Hermann Härtig Real-Time Operating Systems Brief Overview 02/02/12 Outline Introduction Basic variants of RTOSes Real-Time paradigms Common requirements for all RTOSes High level resources
CS 104 Computer Organization and Design
 CS 104 Computer Organization and Design Exceptions and Interrupts CS104: Exceptions and Interrupts 1 Exceptions and Interrupts App App App System software Mem CPU I/O Interrupts: Notification of external
CS 104 Computer Organization and Design Exceptions and Interrupts CS104: Exceptions and Interrupts 1 Exceptions and Interrupts App App App System software Mem CPU I/O Interrupts: Notification of external
Introduction. Interprocess communication. Terminology. Shared Memory versus Message Passing
 Introduction Interprocess communication Cooperating processes need to exchange information, as well as synchronize with each other, to perform their collective task(s). The primitives discussed earlier
Introduction Interprocess communication Cooperating processes need to exchange information, as well as synchronize with each other, to perform their collective task(s). The primitives discussed earlier
Chapter 3: Processes. Operating System Concepts 8th Edition, modified by Stewart Weiss
 Chapter 3: Processes Operating System Concepts 8 Edition, Chapter 3: Processes Process Concept Process Scheduling Operations on Processes Interprocess Communication Examples of IPC Systems Communication
Chapter 3: Processes Operating System Concepts 8 Edition, Chapter 3: Processes Process Concept Process Scheduling Operations on Processes Interprocess Communication Examples of IPC Systems Communication
Important From Last Time
 Important From Last Time Embedded C Ø Pros and cons Macros and how to avoid them Intrinsics Interrupt syntax Inline assembly Today Advanced C What C programs mean How to create C programs that mean nothing
Important From Last Time Embedded C Ø Pros and cons Macros and how to avoid them Intrinsics Interrupt syntax Inline assembly Today Advanced C What C programs mean How to create C programs that mean nothing
Real Time Operating System Support for Concurrency
 Real Time Operating System Support for Concurrency Colin Perkins teaching/2003-2004/rtes4/lecture13.pdf Lecture Outline Resources and Resource access control Synchronisation and Locking Implementing priority
Real Time Operating System Support for Concurrency Colin Perkins teaching/2003-2004/rtes4/lecture13.pdf Lecture Outline Resources and Resource access control Synchronisation and Locking Implementing priority
CS24: INTRODUCTION TO COMPUTING SYSTEMS. Spring 2017 Lecture 19
 CS24: INTRODUCTION TO COMPUTING SYSTEMS Spring 2017 Lecture 19 LAST TIME Introduced UNIX signals A kernel facility that provides user-mode exceptional control flow Allows many hardware-level exceptions
CS24: INTRODUCTION TO COMPUTING SYSTEMS Spring 2017 Lecture 19 LAST TIME Introduced UNIX signals A kernel facility that provides user-mode exceptional control flow Allows many hardware-level exceptions
Project #1 Exceptions and Simple System Calls
 Project #1 Exceptions and Simple System Calls Introduction to Operating Systems Assigned: January 21, 2004 CSE421 Due: February 17, 2004 11:59:59 PM The first project is designed to further your understanding
Project #1 Exceptions and Simple System Calls Introduction to Operating Systems Assigned: January 21, 2004 CSE421 Due: February 17, 2004 11:59:59 PM The first project is designed to further your understanding
CSC209: Software tools. Unix files and directories permissions utilities/commands Shell programming quoting wild cards files
 CSC209 Review CSC209: Software tools Unix files and directories permissions utilities/commands Shell programming quoting wild cards files ... and systems programming C basic syntax functions arrays structs
CSC209 Review CSC209: Software tools Unix files and directories permissions utilities/commands Shell programming quoting wild cards files ... and systems programming C basic syntax functions arrays structs
CSC209: Software tools. Unix files and directories permissions utilities/commands Shell programming quoting wild cards files. Compiler vs.
 CSC209 Review CSC209: Software tools Unix files and directories permissions utilities/commands Shell programming quoting wild cards files... and systems programming C basic syntax functions arrays structs
CSC209 Review CSC209: Software tools Unix files and directories permissions utilities/commands Shell programming quoting wild cards files... and systems programming C basic syntax functions arrays structs
Roadmap. Tevfik Ko!ar. CSC Operating Systems Fall Lecture - III Processes. Louisiana State University. Processes. September 1 st, 2009
 CSC 4103 - Operating Systems Fall 2009 Lecture - III Processes Tevfik Ko!ar Louisiana State University September 1 st, 2009 1 Roadmap Processes Basic Concepts Process Creation Process Termination Context
CSC 4103 - Operating Systems Fall 2009 Lecture - III Processes Tevfik Ko!ar Louisiana State University September 1 st, 2009 1 Roadmap Processes Basic Concepts Process Creation Process Termination Context
Signal Example 1. Signal Example 2
 Signal Example 1 #include #include void ctrl_c_handler(int tmp) { printf("you typed CTL-C, but I don't want to die!\n"); int main(int argc, char* argv[]) { long i; signal(sigint, ctrl_c_handler);
Signal Example 1 #include #include void ctrl_c_handler(int tmp) { printf("you typed CTL-C, but I don't want to die!\n"); int main(int argc, char* argv[]) { long i; signal(sigint, ctrl_c_handler);
OS lpr. www. nfsd gcc emacs ls 1/27/09. Process Management. CS 537 Lecture 3: Processes. Example OS in operation. Why Processes? Simplicity + Speed
 Process Management CS 537 Lecture 3: Processes Michael Swift This lecture begins a series of topics on processes, threads, and synchronization Today: processes and process management what are the OS units
Process Management CS 537 Lecture 3: Processes Michael Swift This lecture begins a series of topics on processes, threads, and synchronization Today: processes and process management what are the OS units
Processes Prof. James L. Frankel Harvard University. Version of 6:16 PM 10-Feb-2017 Copyright 2017, 2015 James L. Frankel. All rights reserved.
 Processes Prof. James L. Frankel Harvard University Version of 6:16 PM 10-Feb-2017 Copyright 2017, 2015 James L. Frankel. All rights reserved. Process Model Each process consists of a sequential program
Processes Prof. James L. Frankel Harvard University Version of 6:16 PM 10-Feb-2017 Copyright 2017, 2015 James L. Frankel. All rights reserved. Process Model Each process consists of a sequential program
Kernel Services CIS 657
 Kernel Services CIS 657 System Processes in Traditional Unix Three processes created at startup time init process 1 user-mode administrative tasks (keeps getty running; shutdown) ancestor of all of your
Kernel Services CIS 657 System Processes in Traditional Unix Three processes created at startup time init process 1 user-mode administrative tasks (keeps getty running; shutdown) ancestor of all of your
Any of the descriptors in the set {1, 4} have an exception condition pending
 Page 1 of 6 6.3 select Function This function allows the process to instruct the kernel to wait for any one of multiple events to occur and to wake up the process only when one or more of these events
Page 1 of 6 6.3 select Function This function allows the process to instruct the kernel to wait for any one of multiple events to occur and to wake up the process only when one or more of these events
Signals. Joseph Cordina
 1 Signals Signals are software interrupts that give us a way to handle asynchronous events. Signals can be received by or sent to any existing process. It provides a flexible way to stop execution of a
1 Signals Signals are software interrupts that give us a way to handle asynchronous events. Signals can be received by or sent to any existing process. It provides a flexible way to stop execution of a
CSE 153 Design of Operating Systems Fall 18
 CSE 153 Design of Operating Systems Fall 18 Lecture 2: OS model and Architectural Support Last time/today l Historic evolution of Operating Systems (and computing!) l Today: We start our journey in exploring
CSE 153 Design of Operating Systems Fall 18 Lecture 2: OS model and Architectural Support Last time/today l Historic evolution of Operating Systems (and computing!) l Today: We start our journey in exploring