Development of a CAN Slave Module with SystemC. Igor Sachs Shang Qihua
|
|
|
- Pearl Avice Ford
- 5 years ago
- Views:
Transcription
1 Development of a CAN Slave Module with SystemC Igor Sachs Shang Qihua
2 Agenda 0. Motivation 1. Introduction to the CAN-Bus 1.1 The CAN Message Format (Frame) 1.2 Bus Arbitration 1.3 Bit Stuffing 2. Development of the Slave Module 2.1 The architecture of the Module 2.2 The Finite State Machine (FSM) 2.3 Problems 3. Presentation of the Hardware 4. Conclusion 5. Questions
3 Motivation The Controller Area Network (CAN) is a Fieldbus which has realtime capabilities and is mainly used in the automotive industry. The so-called Multimaster Bus was developed at Bosch in 1981 and is today the de-facto standard within Car-electronics. The aim of our project was to design a Slave module for the CAN Bus using the HDL SystemC and implement it into an Xilinx Spartan-2 FPGA CAN Controller CAN Slave... CAN Slave CAN-Bus R T R T
 Source:")
4 Wiring Harness Yesterday (VW Beetle 1950) Source: Decomsys
 Source:")
5 Wiring Harness Today (VW Phaeton) Source: Decomsys
6 The CAN Message Format Every datagram within the CAN Bus consists of a number of bits, which are divided into different fields. Source: Microchip Technology Inc. SOF: 1 dominant bit (0) to indicate the beginning of a new message Arbitration: 11 bit identifier of the source of the message (priority) + RTR Control: 6 bits to identify the length of the data Data: Data to be transmitted (payload) CRC: Cyclic Redundancy Check (bit errors)
7 Bus Arbitration To avoid data collisions, CAN performs a bitwise and nondestructive arbitration on the bus Wired AND configuration: - 0-level: dominant level - 1-level: recessive level Whenever the bus is free (recessive level), any station can start to transmit data. => Multimaster functionality The lower the value of the identifier, the higher the priority of the frame
8 Bus Arbitration 2 Nodes writing to the bus: Listen only Node 1 Node 2 Bus The dominant zero of Slave 2 is written on the bus
9 Bit Stuffing In order to enable synchronisation of the CAN Modules within the frame, there has to be some level-transitions of the data of the frame. To ensure this, if it is naturally not the case, Bit Stuffing has to be applied Whenever 5 consecutive zeros or ones have been detected, an inverted stuff-bit has to be inserted into the bitstream Additional stuff bit
10 Special Example of Bit Stuffing Transform the Bits stream to the bus stuff bit stuff bit
11 Development of the CAN Slave Module Analysis Project Block Diagram FSM Design Hardware Implementation Verilog SystemC
12 The Finite State Machine (FSM) FSM: RESET IDLE RX = 1 & RTR = 0 RX = 0 RTR = 1 STARTING RECEIVING ELSE SAMPLES = 7 RX!= TX EOF = 1 BITDESTUFF = 1 ELSE ARBITRATION BIT DESTUFFING SAMPLES = 7 RX = TX BIT STUFFING BITSTUFF = 1 TRANSMITTING SAMPLES = 7 ELSE ELSE
13 Architecture of the CAN Bus Vcc CAN-H CAN-L Can Controller RX TX 8051 Microcontroller RX TX 82C200 RX TX SN75176A Transceiver (1) B(7,27) A(2,31) 120Ω GND FPGA Can slave RX RE TX D SN75176A Transceiver (2) B A Vcc CAN-BUS GND GND 120Ω

14 Interface between CAN Master and Salve

15 Hardware of the Candy (Can Master)

16 Stream from the CAN Master
17 Problems Bit (de-) stuffing: extraction and insertion of stuff-bits according to the CAN Protocol, including special stuff-bits Termination and connection of bus: Finding out the correct termination, wiring and connections of the bus Timing/synchronization: keep the different Slaves synchronous Clock: elaborate the correct frequencies SystemC -> Modelsim -> Xilinx = 3 different!!! Behaviors + cumbersome development steps (no IDE, but several different tools)
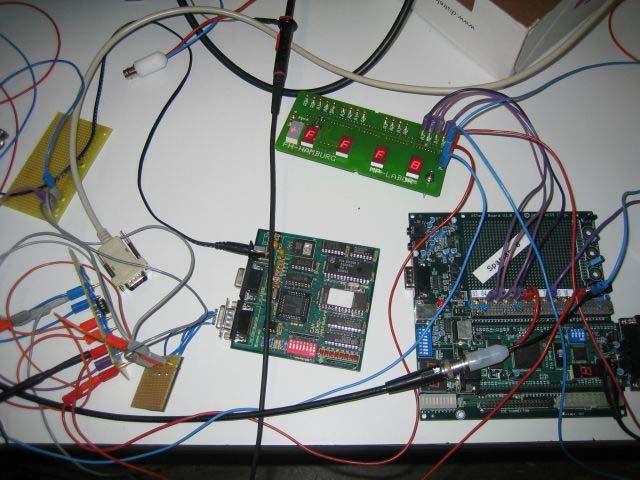
18 Presentation of Hardware
19 Conclusion CAN is a very mighty Bus, which uses its bandwidth efficiently and the access to the Bus is organized according to the priorities of the individual modules. The fieldbus has a guaranteed message latency (priorities through identifiers). Therefore it is very suitable for applications were real-time capabilities are needed. The successor of the CAN Bus will be Flexray, which has in addition Timeand Frequency-Mux capabilities. But CAN will coexist for at least the next one or two decades.

20 Questions Many thanks to: Prof. J. Reichard Prof. B. Schwarz Dipl.-Ing. D. Palme J. Pflüger Any questions left?
21 References Decomsys Presentation on Flexray from at HAW, obtained from Prof. B. Schwarz Stand-Alone CAN Controller With SPI Interface, Microchip Technology Inc. CAN Controller Area Network Grundlagen und Praxis, Wolfhard Lawrenz Controller-Area-Network, Konrad Etschberger
Introduction to Controller Area Network (CAN)
") Introduction to Controller Area Network (CAN) 2003 Microchip Technology Incorporated. All Rights Reserved. Introduction to Controller Area Network (CAN) 1 Topics CAN Protocol Overview What is CAN? CAN
Introduction to Controller Area Network (CAN) 2003 Microchip Technology Incorporated. All Rights Reserved. Introduction to Controller Area Network (CAN) 1 Topics CAN Protocol Overview What is CAN? CAN
Today. Last Time. Motivation. CAN Bus. More about CAN. What is CAN?
 Embedded networks Characteristics Requirements Simple embedded LANs Bit banged SPI I2C LIN Ethernet Last Time CAN Bus Intro Low-level stuff Frame types Arbitration Filtering Higher-level protocols Today
Embedded networks Characteristics Requirements Simple embedded LANs Bit banged SPI I2C LIN Ethernet Last Time CAN Bus Intro Low-level stuff Frame types Arbitration Filtering Higher-level protocols Today
Communication Networks for the Next-Generation Vehicles
 Communication Networks for the, Ph.D. Electrical and Computer Engg. Dept. Wayne State University Detroit MI 48202 (313) 577-3855, smahmud@eng.wayne.edu January 13, 2005 4 th Annual Winter Workshop U.S.
Communication Networks for the, Ph.D. Electrical and Computer Engg. Dept. Wayne State University Detroit MI 48202 (313) 577-3855, smahmud@eng.wayne.edu January 13, 2005 4 th Annual Winter Workshop U.S.
The Controller Area Network (CAN) Interface
 Interface") The Controller Area Network (CAN) Interface ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it L.S.M. Course
The Controller Area Network (CAN) Interface ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it L.S.M. Course
CAN Protocol Implementation
 CAN Protocol Implementation Arun Pasupathi, Gaurav Agalave Electrical and Computer Engineering Department School of Engineering and Computer Science Oakland University, Rochester, MI e-mails: apasupathi@oakland.edu,
CAN Protocol Implementation Arun Pasupathi, Gaurav Agalave Electrical and Computer Engineering Department School of Engineering and Computer Science Oakland University, Rochester, MI e-mails: apasupathi@oakland.edu,
Recommended readings
 Recommended readings Dominique Paret, Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire..., ISBN: 978-0- 470-03416-3, 434 pages, WILEY, UK, 2007. Wolfhard Lawrenz, CAN System Engineering:
Recommended readings Dominique Paret, Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire..., ISBN: 978-0- 470-03416-3, 434 pages, WILEY, UK, 2007. Wolfhard Lawrenz, CAN System Engineering:
CAN-FD Flexible Data Rate CAN
 FD CAN-FD Flexible Data Rate CAN A Short Primer and Update V. 202-08-27 Agenda > Why CAN-FD? What is CAN-FD? Basic Concepts CAN-FD Specifics Data Frame Operating Modes/States Physical Layer Considerations
FD CAN-FD Flexible Data Rate CAN A Short Primer and Update V. 202-08-27 Agenda > Why CAN-FD? What is CAN-FD? Basic Concepts CAN-FD Specifics Data Frame Operating Modes/States Physical Layer Considerations
Course Introduction. Purpose. Objectives. Content. Learning Time
 Course Introduction Purpose This training course provides an overview of Message Frames and hardware issues of the Controller Area Network (CAN) technology used to build networked, multiprocessor embedded
Course Introduction Purpose This training course provides an overview of Message Frames and hardware issues of the Controller Area Network (CAN) technology used to build networked, multiprocessor embedded
Operating Systems, Concurrency and Time. real-time communication and CAN. Johan Lukkien
 Operating Systems, Concurrency and Time real-time communication and CAN Johan Lukkien (Courtesy: Damir Isovic, Reinder Bril) Question Which requirements to communication arise from real-time systems? How
Operating Systems, Concurrency and Time real-time communication and CAN Johan Lukkien (Courtesy: Damir Isovic, Reinder Bril) Question Which requirements to communication arise from real-time systems? How
Design and Implementation of CAN Bus Controller on FPGA
 Design and Implementation of CAN Bus Controller on FPGA Vaibhav Bhutada 1, Shubhangi Joshi 2, Tanuja Zende 3 1, 2, 3 Asst. Professor, Department of Electronics & Communication Engineering, Shri. Chhatrapati
Design and Implementation of CAN Bus Controller on FPGA Vaibhav Bhutada 1, Shubhangi Joshi 2, Tanuja Zende 3 1, 2, 3 Asst. Professor, Department of Electronics & Communication Engineering, Shri. Chhatrapati
Additional Slides (informative)
") Automation Systems Discrete Event Control Systems and Networked Automation Systems Additional Slides (informative) Application Automotive Networks (LIN, CAN, FlexRay, MOST) Vorlesungstitel Vehicle Bus
Automation Systems Discrete Event Control Systems and Networked Automation Systems Additional Slides (informative) Application Automotive Networks (LIN, CAN, FlexRay, MOST) Vorlesungstitel Vehicle Bus
Controller area network
 Controller area network From Wikipedia, the free encyclopedia (Redirected from Controller area network) Controller area network (CAN or CAN-bus) is a vehicle bus standard designed to allow microcontrollers
Controller area network From Wikipedia, the free encyclopedia (Redirected from Controller area network) Controller area network (CAN or CAN-bus) is a vehicle bus standard designed to allow microcontrollers
BOSCH. CAN Specification. Version , Robert Bosch GmbH, Postfach , D Stuttgart
 CAN Specification Version 2.0 1991, Robert Bosch GmbH, Postfach 30 02 40, D-70442 Stuttgart CAN Specification 2.0 page 1 Recital The acceptance and introduction of serial communication to more and more
CAN Specification Version 2.0 1991, Robert Bosch GmbH, Postfach 30 02 40, D-70442 Stuttgart CAN Specification 2.0 page 1 Recital The acceptance and introduction of serial communication to more and more
CAN with Flexible Data-Rate
 CAN with Flexible Data-Rate Florian Hartwich, Robert Bosch GmbH Ever increasing bandwidth requirements in automotive networks impede the applicability of CAN due to its bit rate limitation to 1 MBit/s.
CAN with Flexible Data-Rate Florian Hartwich, Robert Bosch GmbH Ever increasing bandwidth requirements in automotive networks impede the applicability of CAN due to its bit rate limitation to 1 MBit/s.
CAN protocol enhancement
 Protocols CAN protocol enhancement This article describes the enhanced CAN protocol called CAN-HG and the features of the IC circuitry from Canis that implement it. CAN-HG has been designed to meet two
Protocols CAN protocol enhancement This article describes the enhanced CAN protocol called CAN-HG and the features of the IC circuitry from Canis that implement it. CAN-HG has been designed to meet two
The House Intelligent Switch Control Network based On CAN bus
 The House Intelligent Switch Control Network based On CAN bus A.S.Jagadish Department Electronics and Telecommunication Engineering, Bharath University Abstract The Embedded Technology is now in its prime
The House Intelligent Switch Control Network based On CAN bus A.S.Jagadish Department Electronics and Telecommunication Engineering, Bharath University Abstract The Embedded Technology is now in its prime
Basics of UART Communication
 Basics of UART Communication From: Circuit Basics UART stands for Universal Asynchronous Receiver/Transmitter. It s not a communication protocol like SPI and I2C, but a physical circuit in a microcontroller,
Basics of UART Communication From: Circuit Basics UART stands for Universal Asynchronous Receiver/Transmitter. It s not a communication protocol like SPI and I2C, but a physical circuit in a microcontroller,
ACC, a Next Generation CAN Controller
 ACC, a Next Generation CAN Controller Reinhard Arlt, esd electronic system design gmbh Andreas Block, esd electronic system design gmbh Tobias Höger, esd electronic system design gmbh Most standalone CAN
ACC, a Next Generation CAN Controller Reinhard Arlt, esd electronic system design gmbh Andreas Block, esd electronic system design gmbh Tobias Höger, esd electronic system design gmbh Most standalone CAN
An Introduction to CAN by Peter Bagschik (I+ME ACTIA)
") 1 of 11 24.10.00 14:36 An Introduction to CAN by Peter Bagschik (I+ME ACTIA) The CAN (Controller Area Network) protocol was developed in Europe for the use in passenger cars. Through the successful use
1 of 11 24.10.00 14:36 An Introduction to CAN by Peter Bagschik (I+ME ACTIA) The CAN (Controller Area Network) protocol was developed in Europe for the use in passenger cars. Through the successful use
Data Link Layer Technologies
 Chapter 2.2 La 2 Data Link La Technologies 1 Content Introduction La 2: Frames Error Handling 2 Media Access Control General approaches and terms Aloha Principles CSMA, CSMA/CD, CSMA / CA Master-Slave
Chapter 2.2 La 2 Data Link La Technologies 1 Content Introduction La 2: Frames Error Handling 2 Media Access Control General approaches and terms Aloha Principles CSMA, CSMA/CD, CSMA / CA Master-Slave
A Framework Of Milk Dairy Automation Using CAN Protocol
 Reviewed Paper Volume 2 Issue 7 March 2015 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Framework Of Milk Dairy Automation Using CAN Protocol Paper ID IJIFR/ V2/
Reviewed Paper Volume 2 Issue 7 March 2015 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Framework Of Milk Dairy Automation Using CAN Protocol Paper ID IJIFR/ V2/
Figure 1. ECU Access to CAN bus
 Welcome to our 4th CAN Tech Tips feature (Sort of a Chinese New Year edition). In December we showed how the CAN frame is packaged before sending over the physical bus. In the edition we will cover the
Welcome to our 4th CAN Tech Tips feature (Sort of a Chinese New Year edition). In December we showed how the CAN frame is packaged before sending over the physical bus. In the edition we will cover the
FlexRay and Automotive Networking Future
 FlexRay and Automotive Networking Future Chris Quigley Warwick Control Technologies Presentation Overview High Speed and High Integrity Networking Why FlexRay? CAN Problems Time Triggered Network Principles
FlexRay and Automotive Networking Future Chris Quigley Warwick Control Technologies Presentation Overview High Speed and High Integrity Networking Why FlexRay? CAN Problems Time Triggered Network Principles
Ch 7. Network Interface
 EE414 Embedded Systems Ch 7. Network Interface Part 1/2 Byung Kook Kim School of Electrical Engineering Korea Advanced Institute of Science and Technology Overview 7.1 Advanced Communication Principles
EE414 Embedded Systems Ch 7. Network Interface Part 1/2 Byung Kook Kim School of Electrical Engineering Korea Advanced Institute of Science and Technology Overview 7.1 Advanced Communication Principles
UNDERSTANDING THE CONTROLLER AREA NETWORK (CAN)
") UNDERSTANDING THE CONTROLLER AREA NETWORK (CAN) The unsuspecting troops had come under heavy enemy fire just before dawn and the garrison was caught totally by surprise. The fort commander had been awakened
UNDERSTANDING THE CONTROLLER AREA NETWORK (CAN) The unsuspecting troops had come under heavy enemy fire just before dawn and the garrison was caught totally by surprise. The fort commander had been awakened
CAN bus and NMEA2000 1
 NMEA2000 relation to CAN and how Warwick Control can help Richard McLaughlin B.Sc., M.Sc., CEng Dr Chris Quigley Warwick Control NMEA Conference 2016, Naples, Florida CAN bus and NMEA2000 1 Company Profile
NMEA2000 relation to CAN and how Warwick Control can help Richard McLaughlin B.Sc., M.Sc., CEng Dr Chris Quigley Warwick Control NMEA Conference 2016, Naples, Florida CAN bus and NMEA2000 1 Company Profile
Serial Buses in Industrial and Automotive Applications
 Serial Buses in Industrial and Automotive Applications Presented by Neelima Chaurasia Class: #368 1 Overview As consumer electronics, computer peripherals, vehicles and industrial applications add embedded
Serial Buses in Industrial and Automotive Applications Presented by Neelima Chaurasia Class: #368 1 Overview As consumer electronics, computer peripherals, vehicles and industrial applications add embedded
EE445M/EE380L.12, Lecture 10 4/2/2018. EE445M/EE360L.6 Embedded and Real-Time Systems/ Real-Time Operating Systems. Lecture 10
 , 4/2/2018 EE445M/EE360L.6 Embedded and Real-Time Systems/ Real-Time Operating Systems : Networking, bus, Ethernet, Embedded Internet, TCP/IP 1 Network Collection of interfaces that share a physical medium
, 4/2/2018 EE445M/EE360L.6 Embedded and Real-Time Systems/ Real-Time Operating Systems : Networking, bus, Ethernet, Embedded Internet, TCP/IP 1 Network Collection of interfaces that share a physical medium
EE445M/EE380L.6, Lecture 10 4/3/2016. EE445M/EE360L.6 Embedded and Real-Time Systems/ Real-Time Operating Systems. Lecture 10
 , 4/3/2016 EE445M/EE360L.6 Embedded and Real-Time Systems/ Real-Time Operating Systems : Networking, bus, Ethernet, Embedded Internet, TCP/IP 1 Network Collection of interfaces that share a physical medium
, 4/3/2016 EE445M/EE360L.6 Embedded and Real-Time Systems/ Real-Time Operating Systems : Networking, bus, Ethernet, Embedded Internet, TCP/IP 1 Network Collection of interfaces that share a physical medium
in Mainz (Germany) Sponsored by Allen Bradley National Semiconductor Philips Semiconductors Organized by
 Sponsored by Allen Bradley National Semiconductor Philips Semiconductors Organized by") 1 st international CAN Conference icc 1994 in Mainz (Germany) Sponsored by Allen Bradley National Semiconductor Philips Semiconductors Organized by CAN in Automation (CiA) international users and manufacturers
1 st international CAN Conference icc 1994 in Mainz (Germany) Sponsored by Allen Bradley National Semiconductor Philips Semiconductors Organized by CAN in Automation (CiA) international users and manufacturers
DEFINITION AND IMPLEMENTATION OF AN ARCHITECTURAL CONCEPT FOR CONFIGURING A CAN NETWORK
 Bachelor's thesis Degree Programme in Information Technology Internet Technology 2015 Daria Shevchenko DEFINITION AND IMPLEMENTATION OF AN ARCHITECTURAL CONCEPT FOR CONFIGURING A CAN NETWORK BACHELOR S
Bachelor's thesis Degree Programme in Information Technology Internet Technology 2015 Daria Shevchenko DEFINITION AND IMPLEMENTATION OF AN ARCHITECTURAL CONCEPT FOR CONFIGURING A CAN NETWORK BACHELOR S
THE INTERNATIONAL JOURNAL OF SCIENCE & TECHNOLEDGE
 THE INTERNATIONAL JOURNAL OF SCIENCE & TECHNOLEDGE Assertion Based Verification of I2C Master Bus Controller with RTC Sagar T. D. M.Tech Student, VLSI Design and Embedded Systems BGS Institute of Technology,
THE INTERNATIONAL JOURNAL OF SCIENCE & TECHNOLEDGE Assertion Based Verification of I2C Master Bus Controller with RTC Sagar T. D. M.Tech Student, VLSI Design and Embedded Systems BGS Institute of Technology,
Implementation of CAN Bus Protocol
 Implementation of CAN Bus Protocol Ms. Ashwini S. Shinde ashushinde16@gmail.com Ms. Aarti S. Deshpande aartideshpande11@gmail.com Mr. Pradnyant N Kalamkar pnkalamkar4587@gmail.com Mr. Arjun R. Nichal arjunnichal@gmail.com
Implementation of CAN Bus Protocol Ms. Ashwini S. Shinde ashushinde16@gmail.com Ms. Aarti S. Deshpande aartideshpande11@gmail.com Mr. Pradnyant N Kalamkar pnkalamkar4587@gmail.com Mr. Arjun R. Nichal arjunnichal@gmail.com
STUDY, DESIGN AND SIMULATION OF FPGA BASED USB 2.0 DEVICE CONTROLLER
 STUDY, DESIGN AND SIMULATION OF FPGA BASED USB 2.0 DEVICE CONTROLLER 1 MS. PARUL BAHUGUNA CD 1 M.E. [VLSI & Embedded System Design] Student, Gujarat Technological University PG School, Ahmedabad, Gujarat.
STUDY, DESIGN AND SIMULATION OF FPGA BASED USB 2.0 DEVICE CONTROLLER 1 MS. PARUL BAHUGUNA CD 1 M.E. [VLSI & Embedded System Design] Student, Gujarat Technological University PG School, Ahmedabad, Gujarat.
Controller Area Network
 Controller Area Network 1 CAN FUNDAMENTALS...3 1.1 USER BENEFITS...3 1.1.1 CAN is low cost...3 1.1.2 CAN is reliable...3 1.1.3 CAN means real-time...3 1.1.4 CAN is flexible...3 1.1.5 CAN means Multicast
Controller Area Network 1 CAN FUNDAMENTALS...3 1.1 USER BENEFITS...3 1.1.1 CAN is low cost...3 1.1.2 CAN is reliable...3 1.1.3 CAN means real-time...3 1.1.4 CAN is flexible...3 1.1.5 CAN means Multicast
Pretty Good Protocol - Design Specification
 Document # Date effective October 23, 2006 Author(s) Ryan Herbst Supersedes Draft Revision 0.02 January 12, 2007 Document Title Pretty Good Protocol - Design Specification CHANGE HISTORY LOG Revision Effective
Document # Date effective October 23, 2006 Author(s) Ryan Herbst Supersedes Draft Revision 0.02 January 12, 2007 Document Title Pretty Good Protocol - Design Specification CHANGE HISTORY LOG Revision Effective
What is needed on top of TLM-2 for bigger Systems?
 What is needed on top of TLM-2 for bigger Systems? Jerome Cornet - ST Martin Schnieringer - Bosch GmbH Accellera Systems Initiative 1 Agenda Introduction Example of Serial Protocols TLM Standard Design
What is needed on top of TLM-2 for bigger Systems? Jerome Cornet - ST Martin Schnieringer - Bosch GmbH Accellera Systems Initiative 1 Agenda Introduction Example of Serial Protocols TLM Standard Design
DCB1M - Transceiver for Powerline Communication
 Preliminary Description DCB1M - Transceiver for Powerline Communication The information in this data sheet is preliminary and may be changed without notice. 1. General The DCB1M is an innovative technology
Preliminary Description DCB1M - Transceiver for Powerline Communication The information in this data sheet is preliminary and may be changed without notice. 1. General The DCB1M is an innovative technology
Systems. Roland Kammerer. 10. November Institute of Computer Engineering Vienna University of Technology. Communication Protocols for Embedded
 Communication Roland Institute of Computer Engineering Vienna University of Technology 10. November 2010 Overview 1. Definition of a protocol 2. Protocol properties 3. Basic Principles 4. system communication
Communication Roland Institute of Computer Engineering Vienna University of Technology 10. November 2010 Overview 1. Definition of a protocol 2. Protocol properties 3. Basic Principles 4. system communication
EP A1 (19) (11) EP A1 (12) EUROPEAN PATENT APPLICATION. (43) Date of publication: Bulletin 2012/45
 (11) EP A1 (12) EUROPEAN PATENT APPLICATION. (43) Date of publication: Bulletin 2012/45") (19) (12) EUROPEAN PATENT APPLICATION (11) EP 2 521 319 A1 (43) Date of publication: 07.11.2012 Bulletin 2012/45 (51) Int Cl.: H04L 12/40 (2006.01) H04L 1/00 (2006.01) (21) Application number: 11164445.6
(19) (12) EUROPEAN PATENT APPLICATION (11) EP 2 521 319 A1 (43) Date of publication: 07.11.2012 Bulletin 2012/45 (51) Int Cl.: H04L 12/40 (2006.01) H04L 1/00 (2006.01) (21) Application number: 11164445.6
or between microcontrollers)
") : Communication Interfaces in Embedded Systems (e.g., to interface with sensors and actuators or between microcontrollers) Spring 2016 : Communication Interfaces in Embedded Systems Spring (e.g., 2016
: Communication Interfaces in Embedded Systems (e.g., to interface with sensors and actuators or between microcontrollers) Spring 2016 : Communication Interfaces in Embedded Systems Spring (e.g., 2016
Using CAN Arbitration for Electrical Layer Testing
 Using CAN Arbitration for Electrical Layer Testing Sam Broyles and Steve Corrigan, Texas Instruments, Inc. The Controller Area Network (CAN) protocol incorporates a powerful means of seamlessly preventing
Using CAN Arbitration for Electrical Layer Testing Sam Broyles and Steve Corrigan, Texas Instruments, Inc. The Controller Area Network (CAN) protocol incorporates a powerful means of seamlessly preventing
Controller Area Network (CAN)
") Controller Area Network (CAN) EECS 461, Fall 2008 J. A. Cook J. S. Freudenberg 1 Introduction Up until now, we ve considered our embedded control system to be self-contained: an algorithm implemented in
Controller Area Network (CAN) EECS 461, Fall 2008 J. A. Cook J. S. Freudenberg 1 Introduction Up until now, we ve considered our embedded control system to be self-contained: an algorithm implemented in
Links. CS125 - mylinks 1 1/22/14
 Links 1 Goals of Today s Lecture Link-layer services Encoding, framing, and error detection Error correction and flow control Sharing a shared media Channel partitioning Taking turns Random access Shared
Links 1 Goals of Today s Lecture Link-layer services Encoding, framing, and error detection Error correction and flow control Sharing a shared media Channel partitioning Taking turns Random access Shared
IMPLEMENTATION OF CONTROLLER AREA NETWORK FOR AUTOMOTIVE APPLICATIONS
 IMPLEMENTATION OF CONTROLLER AREA NETWORK FOR AUTOMOTIVE APPLICATIONS A THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF Master of Technology in VLSI Design and Embedded System
IMPLEMENTATION OF CONTROLLER AREA NETWORK FOR AUTOMOTIVE APPLICATIONS A THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF Master of Technology in VLSI Design and Embedded System
Sri Vidya College of Engineering and Technology. EC6703 Embedded and Real Time Systems Unit IV Page 1.
 Sri Vidya College of Engineering and Technology ERTS Course Material EC6703 Embedded and Real Time Systems Page 1 Sri Vidya College of Engineering and Technology ERTS Course Material EC6703 Embedded and
Sri Vidya College of Engineering and Technology ERTS Course Material EC6703 Embedded and Real Time Systems Page 1 Sri Vidya College of Engineering and Technology ERTS Course Material EC6703 Embedded and
CHAPTER 6 FPGA IMPLEMENTATION OF ARBITERS ALGORITHM FOR NETWORK-ON-CHIP
 133 CHAPTER 6 FPGA IMPLEMENTATION OF ARBITERS ALGORITHM FOR NETWORK-ON-CHIP 6.1 INTRODUCTION As the era of a billion transistors on a one chip approaches, a lot of Processing Elements (PEs) could be located
133 CHAPTER 6 FPGA IMPLEMENTATION OF ARBITERS ALGORITHM FOR NETWORK-ON-CHIP 6.1 INTRODUCTION As the era of a billion transistors on a one chip approaches, a lot of Processing Elements (PEs) could be located
Implementation and validation of SAE J1850 (VPW) protocol solution for diagnosis application
 protocol solution for diagnosis application") Implementation and validation of SAE J1850 (VPW) protocol solution for diagnosis application Pallavi Pandurang Jadhav 1, Prof. S.N.Kore 2 1Department Of Electronics Engineering, Walchand College Of Engineering,
Implementation and validation of SAE J1850 (VPW) protocol solution for diagnosis application Pallavi Pandurang Jadhav 1, Prof. S.N.Kore 2 1Department Of Electronics Engineering, Walchand College Of Engineering,
DESIGNING OF INTER INTEGRATED CIRCUIT USING VERILOG
 DESIGNING OF INTER INTEGRATED CIRCUIT USING VERILOG DISHA MALIK Masters of Technology Scholar, Department of Electronics & Communication Engineering, Jayoti Vidyapeeth Women s University, Jaipur INDIA
DESIGNING OF INTER INTEGRATED CIRCUIT USING VERILOG DISHA MALIK Masters of Technology Scholar, Department of Electronics & Communication Engineering, Jayoti Vidyapeeth Women s University, Jaipur INDIA
CAN in Space workshop
 CAN in Space workshop Holger Zeltwanger www.can-cia.org The next generation of CAN technology: Chances and challenges of CAN FD Presentation outline u Introduction into CAN FD u CAN FD physical layer u
CAN in Space workshop Holger Zeltwanger www.can-cia.org The next generation of CAN technology: Chances and challenges of CAN FD Presentation outline u Introduction into CAN FD u CAN FD physical layer u
(Controller Area Network)
") CAN (Controller Area Network) CAN is open technology supporting multiple applications Chips available today from Intel, Motorola, Philips/Signetics, NEC, Hitachi, Siemens Volumes from multiple industry
CAN (Controller Area Network) CAN is open technology supporting multiple applications Chips available today from Intel, Motorola, Philips/Signetics, NEC, Hitachi, Siemens Volumes from multiple industry
Lab 8 (ETH): Control Area Network
: Control Area Network") 1 Lab 8 (ETH): Control Area Network 2 Lab 7: Controller Area Network For a general description of CAN, see the document posted on the course website Lab 7 has two parts: Part 1: you will write a program
1 Lab 8 (ETH): Control Area Network 2 Lab 7: Controller Area Network For a general description of CAN, see the document posted on the course website Lab 7 has two parts: Part 1: you will write a program
Design & Implementation of AHB Interface for SOC Application
 Design & Implementation of AHB Interface for SOC Application Sangeeta Mangal M. Tech. Scholar Department of Electronics & Communication Pacific University, Udaipur (India) enggsangeetajain@gmail.com Nakul
Design & Implementation of AHB Interface for SOC Application Sangeeta Mangal M. Tech. Scholar Department of Electronics & Communication Pacific University, Udaipur (India) enggsangeetajain@gmail.com Nakul
Enhanced Error-Recovery CAN Bus System Using Reed-Solomon Codec
 Journal of Network Intelligence c 2017 ISSN 2414-8105 (Online) Taiwan Ubiquitous Information Volume 2, Number 4, November 2017 Enhanced Error-Recovery CAN Bus System Using Reed-Solomon Codec Shi-Huang
Journal of Network Intelligence c 2017 ISSN 2414-8105 (Online) Taiwan Ubiquitous Information Volume 2, Number 4, November 2017 Enhanced Error-Recovery CAN Bus System Using Reed-Solomon Codec Shi-Huang
Digital communication technology for teaching automatic control: the level control case
 Digital communication technology for teaching automatic control: the level control case Nicolás H. Beltrán, Manuel A. Duarte-Mermoud and Pablo A. Kremer Department of Electrical Engineering, University
Digital communication technology for teaching automatic control: the level control case Nicolás H. Beltrán, Manuel A. Duarte-Mermoud and Pablo A. Kremer Department of Electrical Engineering, University
INTER INTRA VEHICULAR COMMUNICATION
 INTER INTRA VEHICULAR COMMUNICATION Neethu P P 1 and Siddharth Shelly 2 Department of Electronics& Communication, Mar Athanasius College of Engineering, A.P.J Abdul Kalam Technological University, Kerala,
INTER INTRA VEHICULAR COMMUNICATION Neethu P P 1 and Siddharth Shelly 2 Department of Electronics& Communication, Mar Athanasius College of Engineering, A.P.J Abdul Kalam Technological University, Kerala,
Grundlagen der Automatisierungstechnik. 10. Signale und Kommunikation in der Automatisierungstechnik
 Grundlagen der Automatisierungstechnik (Automatisierungstechnik 1) 10. Signale und Kommunikation in der Automatisierungstechnik Outline Signals analogue vs. digital cyclic vs. event-driven Analogue vs.
Grundlagen der Automatisierungstechnik (Automatisierungstechnik 1) 10. Signale und Kommunikation in der Automatisierungstechnik Outline Signals analogue vs. digital cyclic vs. event-driven Analogue vs.
FlexRay International Workshop. Protocol Overview
 FlexRay International Workshop 4 th March 2003 Detroit Protocol Overview Dr. Christopher Temple - Motorola FlexRay principles Provide a communication infrastructure for future generation highspeed control
FlexRay International Workshop 4 th March 2003 Detroit Protocol Overview Dr. Christopher Temple - Motorola FlexRay principles Provide a communication infrastructure for future generation highspeed control
FPGA Implementation Of SPI To I2C Bridge
 FPGA Implementation Of SPI To I2C Bridge Abhilash S.Warrier Akshay S.Belvadi Dhiraj R.Gawhane Babu Ravi Teja K Abstract Today s electronic system is not a standalone unit instead working in a group, where
FPGA Implementation Of SPI To I2C Bridge Abhilash S.Warrier Akshay S.Belvadi Dhiraj R.Gawhane Babu Ravi Teja K Abstract Today s electronic system is not a standalone unit instead working in a group, where
Debugging CAN, LIN, and FlexRay Automotive Buses with an Oscilloscope
 Debugging CAN, LIN, and FlexRay Automotive Buses with an Oscilloscope Introduction Embedded systems applications growing rapidly in the automotive industry. Many vehicle designs use CAN, LIN or FlexRay
Debugging CAN, LIN, and FlexRay Automotive Buses with an Oscilloscope Introduction Embedded systems applications growing rapidly in the automotive industry. Many vehicle designs use CAN, LIN or FlexRay
DESIGN AND IMPLEMENTATION OF I2C SINGLE MASTER ON FPGA USING VERILOG
 DESIGN AND IMPLEMENTATION OF I2C SINGLE MASTER ON FPGA USING VERILOG Shivani Mehrotra 1, Nisha Charaya *2 1 M.Tech (ECE), 2 Assistant Professor, Amity University Gurgaon (Haryana), India Abstract: This
DESIGN AND IMPLEMENTATION OF I2C SINGLE MASTER ON FPGA USING VERILOG Shivani Mehrotra 1, Nisha Charaya *2 1 M.Tech (ECE), 2 Assistant Professor, Amity University Gurgaon (Haryana), India Abstract: This
A System Evaluation of CAN Transceivers
 Application Report A System Evaluation of CAN Transceivers Sam Broyles ABSTRACT This application note presents the results of an examination of a two-node controller area network using the SN65HVD230 3.3-V
Application Report A System Evaluation of CAN Transceivers Sam Broyles ABSTRACT This application note presents the results of an examination of a two-node controller area network using the SN65HVD230 3.3-V
Design of an Efficient FSM for an Implementation of AMBA AHB in SD Host Controller
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 4, Issue. 11, November 2015,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 4, Issue. 11, November 2015,
TSS463C. VAN Data Link Controller with Serial Interface. Features. Description
 Features Fully Compliant to VAN Specification ISO/11519-3 Handles All Specified Module Types Handles All Specified Message Types Handles Retransmission of Frames on Contention and Errors 3 Separate Line
Features Fully Compliant to VAN Specification ISO/11519-3 Handles All Specified Module Types Handles All Specified Message Types Handles Retransmission of Frames on Contention and Errors 3 Separate Line
Data Link Layer: Overview, operations
 Data Link Layer: Overview, operations Chapter 3 1 Outlines 1. Data Link Layer Functions. Data Link Services 3. Framing 4. Error Detection/Correction. Flow Control 6. Medium Access 1 1. Data Link Layer
Data Link Layer: Overview, operations Chapter 3 1 Outlines 1. Data Link Layer Functions. Data Link Services 3. Framing 4. Error Detection/Correction. Flow Control 6. Medium Access 1 1. Data Link Layer
Serial Communication. Spring, 2018 Prof. Jungkeun Park
 Serial Communication Spring, 2018 Prof. Jungkeun Park Serial Communication Serial communication Transfer of data over a single wire for each direction (send / receive) Process of sending data one bit at
Serial Communication Spring, 2018 Prof. Jungkeun Park Serial Communication Serial communication Transfer of data over a single wire for each direction (send / receive) Process of sending data one bit at
CLAN A technology-independent synthesizable CAN controller
 CLAN A technology-independent synthesizable CAN controller Arnaldo S. R. Oliveira, Nelson L. Arqueiro, Pedro N. Fonseca University of Aveiro / IEETA Portugal The CLAN intellectual property core is a CAN
CLAN A technology-independent synthesizable CAN controller Arnaldo S. R. Oliveira, Nelson L. Arqueiro, Pedro N. Fonseca University of Aveiro / IEETA Portugal The CLAN intellectual property core is a CAN
Lecture 5: Data Link Layer Basics
 Lecture 5: Data Link Layer Basics Dr. Mohammed Hawa Electrical Engineering Department University of Jordan EE426: Communication Networks Layer 2 PDU: Frame 2 1 Bit-oriented vs. Byte-oriented Layer 2 protocols
Lecture 5: Data Link Layer Basics Dr. Mohammed Hawa Electrical Engineering Department University of Jordan EE426: Communication Networks Layer 2 PDU: Frame 2 1 Bit-oriented vs. Byte-oriented Layer 2 protocols
Lecture 2. Basics of networking in automotive systems: Network. topologies, communication principles and standardised protocols
 Lecture 2. Basics of networking in automotive systems: Network topologies, communication principles and standardised protocols Objectives Introduce basic concepts used in building networks for automotive
Lecture 2. Basics of networking in automotive systems: Network topologies, communication principles and standardised protocols Objectives Introduce basic concepts used in building networks for automotive
Laboratory Finite State Machines and Serial Communication
 Laboratory 11 11. Finite State Machines and Serial Communication 11.1. Objectives Study, design, implement and test Finite State Machines Serial Communication Familiarize the students with Xilinx ISE WebPack
Laboratory 11 11. Finite State Machines and Serial Communication 11.1. Objectives Study, design, implement and test Finite State Machines Serial Communication Familiarize the students with Xilinx ISE WebPack
Field buses (part 2): time triggered protocols
: time triggered protocols") Field buses (part 2): time triggered protocols Nico Fritz Universität des Saarlandes Embedded Systems 2002/2003 (c) Daniel Kästner. 1 CAN and LIN LIN CAN Type Arbitration Transfer rate Serial communication
Field buses (part 2): time triggered protocols Nico Fritz Universität des Saarlandes Embedded Systems 2002/2003 (c) Daniel Kästner. 1 CAN and LIN LIN CAN Type Arbitration Transfer rate Serial communication
Timing in the TTCAN Network
 Timing in the Network Florian Hartwich, Bernd Müller, Thomas Führer, Robert Hugel, Robert Bosch GmbH ISO TC22/SC3/WG1/TF6 has standardised (as ISO CD 11898-4) an additional layer to the CAN protocol, Time
Timing in the Network Florian Hartwich, Bernd Müller, Thomas Führer, Robert Hugel, Robert Bosch GmbH ISO TC22/SC3/WG1/TF6 has standardised (as ISO CD 11898-4) an additional layer to the CAN protocol, Time
CAN Connected To FlexRay
 CAN Connected To FlexRay Dipl.-Ing.(FH) Marc Steuerer Prof. Dr.-Ing. Alfred Höß Fachhochschule Amberg-Weiden Kaiser-Wilhelm-Ring 23 92224 Amberg m.steuerer@fh-amberg-weiden.de Michael Wächter Berthold
CAN Connected To FlexRay Dipl.-Ing.(FH) Marc Steuerer Prof. Dr.-Ing. Alfred Höß Fachhochschule Amberg-Weiden Kaiser-Wilhelm-Ring 23 92224 Amberg m.steuerer@fh-amberg-weiden.de Michael Wächter Berthold
Developing and Testing Networked Avionics Systems and Devices By Troy Troshynski, Avionics Interface Technologies
 Developing and Testing Networked Avionics Systems and Devices By Troy Troshynski, Avionics Interface Technologies MIL-STD-1553 The MIL-STD-1553 protocol standard was first published in 1973 by the U.S.
Developing and Testing Networked Avionics Systems and Devices By Troy Troshynski, Avionics Interface Technologies MIL-STD-1553 The MIL-STD-1553 protocol standard was first published in 1973 by the U.S.
Automotive and industrial use cases for CAN FD
 Improved CAN Automotive and industrial use cases for CAN FD Dr. Tobias Lorenz Author Dr. Tobias Lorenz Etas GmbH PO Box 300220 DE-70442 Stuttgart Tel.: +49-711-89661-0 Fax: +49-711-89661-107 tobias.lorenz@etas.com
Improved CAN Automotive and industrial use cases for CAN FD Dr. Tobias Lorenz Author Dr. Tobias Lorenz Etas GmbH PO Box 300220 DE-70442 Stuttgart Tel.: +49-711-89661-0 Fax: +49-711-89661-107 tobias.lorenz@etas.com
IMPLEMENTATION OF INTER AND INTRA VEHICULAR COMMUNICATION SYSTEM
 IMPLEMENTATION OF INTER AND INTRA VEHICULAR COMMUNICATION SYSTEM D.Sridhar 1, N.Mallika 2 and Chirivella Anjaneyulu 3 1 JNTU KAKINADA, SRI VASAVI INSTITUTE OF ENGINEERING AND TECHNOLOGY, Nandamuru, Krishna
IMPLEMENTATION OF INTER AND INTRA VEHICULAR COMMUNICATION SYSTEM D.Sridhar 1, N.Mallika 2 and Chirivella Anjaneyulu 3 1 JNTU KAKINADA, SRI VASAVI INSTITUTE OF ENGINEERING AND TECHNOLOGY, Nandamuru, Krishna
New Generation of CAN Controllers Optimized for 8-bit MCUs
 New Generation of CAN Controllers Optimized for 8-bit MCUs Paul Kinowski, Bertrand Conan ST Microelectronics, Rousset, France With the introduction of OSEK and the increasing number of ECUs in car s body,
New Generation of CAN Controllers Optimized for 8-bit MCUs Paul Kinowski, Bertrand Conan ST Microelectronics, Rousset, France With the introduction of OSEK and the increasing number of ECUs in car s body,
An Introduction to FlexRay as an Industrial Network
 An Introduction to FlexRay as an Industrial Network Robert Shaw, Brendan Jackman Automotive Control Group, Waterford Institute of Technology, Waterford, Ireland. E-mail: rshaw@wit.ie, bjackman@wit.ie Website:
An Introduction to FlexRay as an Industrial Network Robert Shaw, Brendan Jackman Automotive Control Group, Waterford Institute of Technology, Waterford, Ireland. E-mail: rshaw@wit.ie, bjackman@wit.ie Website:
Comparison of CAN Gateway Modules for Automotive and Industrial Control Applications
 Comparison of CAN Gateway Modules for Automotive and Industrial Control Applications Jan Taube 1,2, Florian Hartwich 1, Helmut Beikirch 2 1 Robert Bosch GmbH Reutlingen, 2 University of Rostock Bus architectures
Comparison of CAN Gateway Modules for Automotive and Industrial Control Applications Jan Taube 1,2, Florian Hartwich 1, Helmut Beikirch 2 1 Robert Bosch GmbH Reutlingen, 2 University of Rostock Bus architectures
I 2 C Bus Interface - Slave ver 3.08
 DI2CS I 2 C Bus Interface - Slave ver 3.08 OVERVIEW I 2 C is a two-wire, bi-directional serial bus that provides a simple and efficient method of data transmission over a short distance between many devices.
DI2CS I 2 C Bus Interface - Slave ver 3.08 OVERVIEW I 2 C is a two-wire, bi-directional serial bus that provides a simple and efficient method of data transmission over a short distance between many devices.
AMC data sheet. PMC Module with four CAN bus Nodes ARINC825 compliant for Testing & Simulation of Avionic CAN bus Systems
 data sheet PMC Module with four bus Nodes ARINC825 compliant for Testing & Simulation of Avionic bus Systems Avionics Databus Solutions product guide General Features The PCI Mezzanine Card (PMC) can work
data sheet PMC Module with four bus Nodes ARINC825 compliant for Testing & Simulation of Avionic bus Systems Avionics Databus Solutions product guide General Features The PCI Mezzanine Card (PMC) can work
Design and Implementation of CAN Frame Bit Disturbance based on CAN IP Core
 Design and Implementation of CA Frame Bit Disturbance based on CA IP Core Anyu Cheng a, Xiaofeng Meng b, Bingyang Chen c, Dawei Sun d School of Automation, Chongqing University of Posts and Telecommunications,
Design and Implementation of CA Frame Bit Disturbance based on CA IP Core Anyu Cheng a, Xiaofeng Meng b, Bingyang Chen c, Dawei Sun d School of Automation, Chongqing University of Posts and Telecommunications,
Supported Device Family 1. Supported User Interfaces. Resources 3. Documentation. Design Files. Constraints File
 f LogiCORE IP CAN v4.2 DS798 July 25, 2012 Introduction The Xilinx LogiCORE IP Controller Area Network (CAN) product specification describes the architecture and features of the Xilinx CAN controller core
f LogiCORE IP CAN v4.2 DS798 July 25, 2012 Introduction The Xilinx LogiCORE IP Controller Area Network (CAN) product specification describes the architecture and features of the Xilinx CAN controller core
How to Hack Your Mini Cooper: Reverse Engineering CAN Messages on Passenger Automobiles
 How to Hack Your Mini Cooper: Reverse Engineering CAN Messages on Passenger Automobiles Jason Staggs Who is this guy? Jason Staggs Graduate Research Assistant Institute for Information Security (isec)
How to Hack Your Mini Cooper: Reverse Engineering CAN Messages on Passenger Automobiles Jason Staggs Who is this guy? Jason Staggs Graduate Research Assistant Institute for Information Security (isec)
Workshop on In Vehicle Network using CAN By
 Workshop on In Vehicle Network using CAN By Modern CAR Modern CAR INTRODUCTION 1. Controller Area Network (CAN) was initially created by German automotive system supplier Robert Bosch in the mid-1980s.
Workshop on In Vehicle Network using CAN By Modern CAR Modern CAR INTRODUCTION 1. Controller Area Network (CAN) was initially created by German automotive system supplier Robert Bosch in the mid-1980s.
Keywords- AMBA, AHB, APB, AHB Master, SOC, Split transaction.
 Volume 4, Issue 3, March 2014 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Design of an Efficient
Volume 4, Issue 3, March 2014 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Design of an Efficient
I 2 C Master Control FSM. I 2 C Bus Control FSM. I 2 C Master Controller
 February 2015 Introduction Reference Design RD1139 I 2 C or Inter-Integrated Circuit is a popular serial interface protocol that is widely used in many electronic systems. The I 2 C interface is a two-wire
February 2015 Introduction Reference Design RD1139 I 2 C or Inter-Integrated Circuit is a popular serial interface protocol that is widely used in many electronic systems. The I 2 C interface is a two-wire
ENGINEERING Copyright , Philip Koopman, All Rights Reserved
 Lecture #25 Bluetooth & CAN 18-348 Embedded System Engineering Philip Koopman Monday, 2-April-215 (With slides contributed by Chris Szilagyi) Electrical& Computer ENGINEERING Copyright 26-215, Philip Koopman,
Lecture #25 Bluetooth & CAN 18-348 Embedded System Engineering Philip Koopman Monday, 2-April-215 (With slides contributed by Chris Szilagyi) Electrical& Computer ENGINEERING Copyright 26-215, Philip Koopman,
Reconfigurable Computing. Design and implementation. Chapter 4.1
 Reconfigurable Computing Design and implementation Chapter 4.1 Prof. Dr.-Ing. Jürgen Teich Lehrstuhl für Hardware-Software Software-Co-Design Reconfigurable Computing In System Integration Reconfigurable
Reconfigurable Computing Design and implementation Chapter 4.1 Prof. Dr.-Ing. Jürgen Teich Lehrstuhl für Hardware-Software Software-Co-Design Reconfigurable Computing In System Integration Reconfigurable
Real-Time Communications. LS 12, TU Dortmund
 Real-Time Communications Prof. Dr. Jian-Jia Chen LS 12, TU Dortmund 20, Jan., 2016 Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 1 / 29 Random Access no access control; requires low medium utilization Prof.
Real-Time Communications Prof. Dr. Jian-Jia Chen LS 12, TU Dortmund 20, Jan., 2016 Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 1 / 29 Random Access no access control; requires low medium utilization Prof.
White Paper AHB to Avalon & Avalon to AHB Bridges
 White Paper AHB to & to AHB s Introduction For years, system designers have been manually connecting IP peripheral functions to embedded processors, taking anywhere from weeks to months to accomplish.
White Paper AHB to & to AHB s Introduction For years, system designers have been manually connecting IP peripheral functions to embedded processors, taking anywhere from weeks to months to accomplish.
CONTROLLER AREA NETWORK (CAN)
") GROUP 54C CONTROLLER AREA NETWORK (CAN) CONTENTS GENERAL INFORMATION........ 54C-2 STRUCTURE................... 54C-3 SELF-DIAGNOSIS............... 54C-6 CAN BUS DIAGNOSTICS......... 54C-6 OPERATION...................
GROUP 54C CONTROLLER AREA NETWORK (CAN) CONTENTS GENERAL INFORMATION........ 54C-2 STRUCTURE................... 54C-3 SELF-DIAGNOSIS............... 54C-6 CAN BUS DIAGNOSTICS......... 54C-6 OPERATION...................
CAN FD filter for Classical CAN controllers
 CAN FD filter for Classical CAN controllers Kent Lennartsson, Kvaser AB Even if all new CAN-controllers will support both CAN FD and Classical-CAN (referred as C-CAN in the rest of the text) it is impossible
CAN FD filter for Classical CAN controllers Kent Lennartsson, Kvaser AB Even if all new CAN-controllers will support both CAN FD and Classical-CAN (referred as C-CAN in the rest of the text) it is impossible
Freescale Semiconductor, I. SECTION 13 CAN 2.0B CONTROLLER MODULE (TouCAN)
") nc. SECTION 13 CAN 2.0B CONTROLLER MODULE (TouCAN) This section is an overview of the TouCAN module. Refer to D.10 TouCAN Module for information concerning TouCAN address map and register structure. 13.1
nc. SECTION 13 CAN 2.0B CONTROLLER MODULE (TouCAN) This section is an overview of the TouCAN module. Refer to D.10 TouCAN Module for information concerning TouCAN address map and register structure. 13.1
Comparison of In-Vehicle Communication Protocols for Critical Applications
 IVSS-2005-ARC-03 Comparison of In-Vehicle Communication Protocols for Critical Applications Edward Robert Gundlach and Syed Masud Mahmud Electrical and Computer Engineering Department, Wayne State University,
IVSS-2005-ARC-03 Comparison of In-Vehicle Communication Protocols for Critical Applications Edward Robert Gundlach and Syed Masud Mahmud Electrical and Computer Engineering Department, Wayne State University,
CANopen Maritime A New Standard for Highly Dependable Communication Systems
 CANopen Maritime A New Standard for Highly Dependable Communication Systems Prof. Dr. K. Etschberger, IXXAT Automation Dipl.-Ing. C. Schlegel, IXXAT Automation Dr. O. Schnelle, MTU Friedrichshafen Bjørnar
CANopen Maritime A New Standard for Highly Dependable Communication Systems Prof. Dr. K. Etschberger, IXXAT Automation Dipl.-Ing. C. Schlegel, IXXAT Automation Dr. O. Schnelle, MTU Friedrichshafen Bjørnar
Communication (III) Kai Huang
 Kai Huang") Communication (III) Kai Huang Ethernet Turns 40 12/17/2013 Kai.Huang@tum 2 Outline Bus basics Multiple Master Bus Network-on-Chip Examples o SPI o CAN o FlexRay o Ethernet Basic OSI model Real-Time Ethernet
Communication (III) Kai Huang Ethernet Turns 40 12/17/2013 Kai.Huang@tum 2 Outline Bus basics Multiple Master Bus Network-on-Chip Examples o SPI o CAN o FlexRay o Ethernet Basic OSI model Real-Time Ethernet
Goals of Today s Lecture. Adaptors Communicating
 Goals of Today s Lecture EE 122: Link Layer Ion Stoica TAs: Junda Liu, DK Moon, David Zats http://inst.eecs.berkeley.edu/~ee122/ (Materials with thanks to Vern Paxson, Jennifer Rexford, and colleagues
Goals of Today s Lecture EE 122: Link Layer Ion Stoica TAs: Junda Liu, DK Moon, David Zats http://inst.eecs.berkeley.edu/~ee122/ (Materials with thanks to Vern Paxson, Jennifer Rexford, and colleagues
A Half-duplex Synchronous Serial Fieldbus S 2 CAN with Multi-host Structure
 Sensors & Transducers 2014 by IFSA Publishing, S. L. http://www.sensorsportal.com A Half-duplex Synchronous Serial Fieldbus S 2 CA with Multi-host Structure Xu-Fei SU College of Physics and Information
Sensors & Transducers 2014 by IFSA Publishing, S. L. http://www.sensorsportal.com A Half-duplex Synchronous Serial Fieldbus S 2 CA with Multi-host Structure Xu-Fei SU College of Physics and Information
CprE 488 Embedded Systems Design. Lecture 4 Interfacing Technologies
 CprE 488 Embedded Systems Design Lecture 4 Interfacing Technologies Joseph Zambreno Electrical and Computer Engineering Iowa State University www.ece.iastate.edu/~zambreno rcl.ece.iastate.edu Never trust
CprE 488 Embedded Systems Design Lecture 4 Interfacing Technologies Joseph Zambreno Electrical and Computer Engineering Iowa State University www.ece.iastate.edu/~zambreno rcl.ece.iastate.edu Never trust