FMCAD 2011 (Austin, Texas) Jonathan Kotker, Dorsa Sadigh, Sanjit Seshia University of California, Berkeley
|
|
|
- Lionel Morton
- 5 years ago
- Views:
Transcription

1 FMCAD 2011 (Austin, Texas) Jonathan Kotker, Dorsa Sadigh, Sanjit Seshia University of California, Berkeley 1




2 Cyber-Physical = Computation + Physical Processes Quantitative analysis of programs is crucial: How long does it take? How much energy does it consume? Safety-critical embedded systems: Does the brake-bywire software always actuate the brakes within 1 ms? Energy-limited sensor nets: How much energy must the sensor node harvest for RSA encryption? 2
3 Worst-case execution time (WCET) estimation Estimating distribution of execution times Threshold property: produce test cases that violates program deadline All three problems can be solved if we could predict the execution time of arbitrary program paths. 3
4 Current code-level analysis techniques assume no interrupts, but practical embedded software is interrupt-driven NASA Toyota Unintended Acceleration Report Lack of support in timing analysis tools for interruptdriven code 4
5 Why is timing analysis of interrupt-driven software a hard problem? Path Explosion: Unbounded number of interleavings of tasks and interrupt service routines (ISRs) Platform Modeling: Interrupts impact processor operation 5







6 Program with N tasks (main + ISRs) Hardware Platform Timing Analysis Tool Execution time of arbitrary paths (WCET, distribution, threshold property) 6
7 Program with N tasks (main + ISRs) Hardware Platform Timing Analysis Tool Execution time of arbitrary paths (WCET, distribution, threshold property) 7
8 Priority pre-emptive scheduling Tasks are ordered by priority If a higher-priority task interrupts a lowerpriority task, the lower-priority task cannot later interrupt the higher-priority task TASK 1 TASK 2 TASK 3 PRIORITY 8

9 Lower-bound on interrupt inter-arrival time Interrupt! TIME α 1 α 2 α 3 α 4 α 5 There exists an α > 0 such that α < α 1, α 2, α 3, α 4, α 5, 9
10 Atomicity Code should ideally be structured into atomic sections, perhaps by disabling and re-enabling interrupts* * Our approach works with any atomicity model. 10
11 With these three assumptions, we compute a context bound and perform context-bounded analysis (Qadeer and Rehof, 2005). Number of interleaved paths can still be exponential in the context bound Obtaining measurements can be tedious Basis paths drastically reduce number of paths to be measured to be polynomial in size of sequential program Experiments on a real embedded platform show that WCET and execution times of arbitrary paths can be predicted accurately 11

12 Context-Bounded Model Checking of Concurrent Software Shaz Qadeer and Jakob Rehof (2005) Introduces context-bounded analysis Does not address timing analysis One Stack to Run Them All: Reducing Concurrent Analysis to Sequential Analysis under Priority Scheduling N. Kidd, S. Jagannathan, J. Vitek (2010) Transforms a concurrent program with priority pre-emptive scheduling to a sequential program Reduction applies for reachability only 12
 Assembly-level Threshold property, not WCET analysis Assumes WCET is already")
13 Schedulability Analysis Analyzes if a task can meet its deadline despite preemption Treats tasks as primitive objects Does not capture code correlation across tasks Deadline Analysis of Interrupt-Driven Software, Dennis Brylow and Jens Palsberg (2004) Assembly-level Threshold property, not WCET analysis Assumes WCET is already given 13

14 Approach Experimental Setup Hardware Results Summary and Future Work 14




 TEST SUITE")

15 ANALYSIS PHASE Compute context bound PROGRAM WITH n TASKS MEASUREMENT AND PREDICTION PHASE Compile Program for Platform Generate final sequential program Run timing analysis tool (GAMETIME) TEST SUITE Measure timing on Test Suite Predict timing properties (worst-case, distribution) 15
16 ANALYSIS PHASE Compute context bound PROGRAM WITH n TASKS MEASUREMENT AND PREDICTION PHASE Compile Program for Platform Generate final sequential program Run timing analysis tool (GAMETIME) TEST SUITE Measure timing on Test Suite Predict timing properties (worst-case, distribution) 16


17 TASK 1 TASK 2 Potential interrupt point Bound on total number of context switches between tasks For a context bound of 1, the first task can be interrupted at most once, at either of the two interrupt points. 17






18 Lower bound on interrupt inter-arrival time: α Set A = α, CB = 1 Compute sequential program Compute T w (WCET) Context bound = CB YES T w < A? NO CB++; A = CB α Loop terminates if ISR services the interrupt in time less than α 18
19 ANALYSIS PHASE Compute context bound PROGRAM WITH n TASKS MEASUREMENT AND PREDICTION PHASE Compile Program for Platform Generate final sequential program Run timing analysis tool (GAMETIME) TEST SUITE Measure timing on Test Suite Predict timing properties (worst-case, distribution) 19
20 ANALYSIS PHASE Compute context bound PROGRAM WITH n TASKS MEASUREMENT AND PREDICTION PHASE Compile Program for Platform Generate final sequential program Run timing analysis tool (GAMETIME) TEST SUITE Measure timing on Test Suite Predict timing properties (worst-case, distribution) 20


21 TASK ISR Model occurrence of interrupt points as function calls and bound the number of these function calls (using a global counter) 21
22 ANALYSIS PHASE Compute context bound PROGRAM WITH n TASKS MEASUREMENT AND PREDICTION PHASE Compile Program for Platform Generate final sequential program Run timing analysis tool (GAMETIME) TEST SUITE Measure timing on Test Suite Predict timing properties (worst-case, distribution) 22
23 ANALYSIS PHASE Compute context bound PROGRAM WITH n TASKS MEASUREMENT AND PREDICTION PHASE Compile Program for Platform Generate final sequential program Run timing analysis tool (GAMETIME) TEST SUITE Measure timing on Test Suite Predict timing properties (worst-case, distribution) 23


24 Common operation in cryptography, used for public-key encryption and decryption. What is? Exponentiation is performed using squareand-multiply, where the exponent is progressively divided by two, while the base is progressively squared. 24




25 25
 x 2 = (1, 0, 1, 1, 1, 1, 0, 0, 1) x 3 = (1, 1,")
 CFG (b) Basis paths x 1, x 2, x 3 (c) Additional path x 4 (d) Vector")
26 Edge labels indicate Edge IDs and positions in vector representation x 1 = (1, 1, 0, 0, 1, 1, 0, 0, 1) x 2 = (1, 0, 1, 1, 1, 1, 0, 0, 1) x 3 = (1, 1, 0, 0, 1, 0, 1, 1, 1) x 4 = (1, 0, 1, 1, 1, 0, 1, 1, 1) x 4 = x 2 + x 3 x (a) CFG (b) Basis paths x 1, x 2, x 3 (c) Additional path x 4 (d) Vector representations 26
27 TRUE DISTRIBUTION PREDICTED DISTRIBUTION μ max bounds mean perturbation to basic block timing based on which path it lies on Execution time x is O(b max )
28 ANALYSIS PHASE Compute context bound PROGRAM WITH n TASKS MEASUREMENT AND PREDICTION PHASE Compile Program for Platform Generate final sequential program Run timing analysis tool (GAMETIME) TEST SUITE Measure timing on Test Suite Predict timing properties (worst-case, distribution) 29
29 ANALYSIS PHASE Compute context bound PROGRAM WITH n TASKS MEASUREMENT AND PREDICTION PHASE Compile Program for Platform Generate final sequential program Run timing analysis tool (GAMETIME) TEST SUITE Measure timing on Test Suite Predict timing properties (worst-case, distribution) 30




30 LM3S Bit ARM Cortex M3 5 stage pipeline UART interface to irobot Create No cache No OS
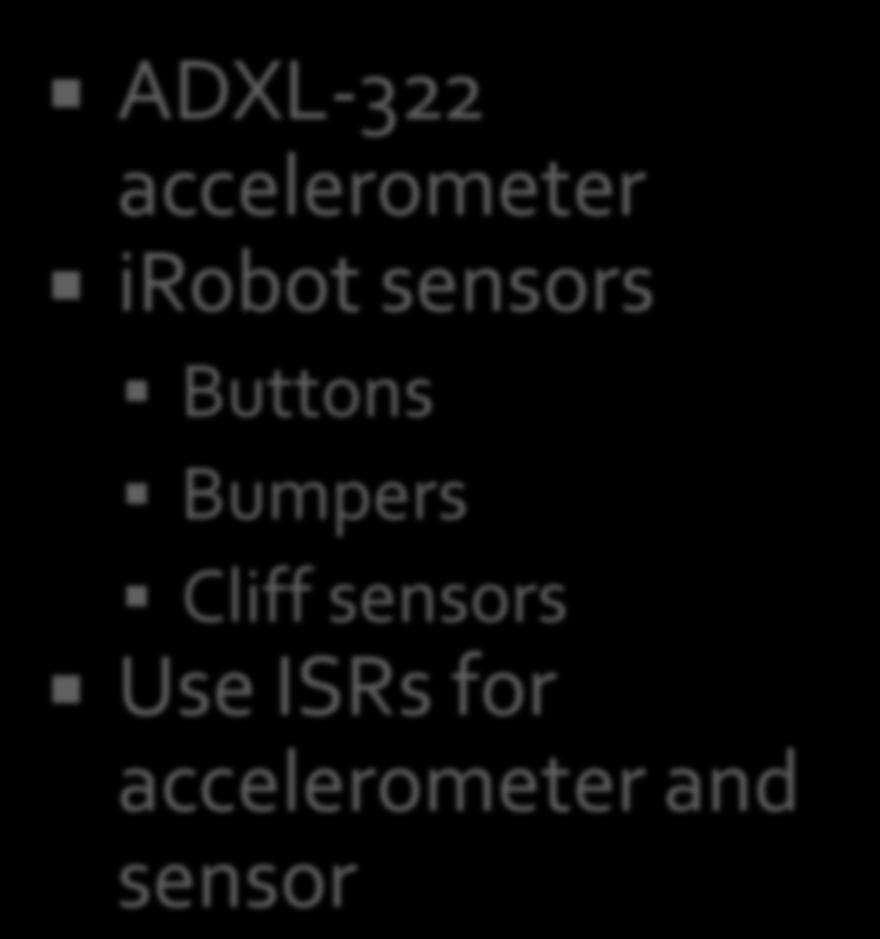




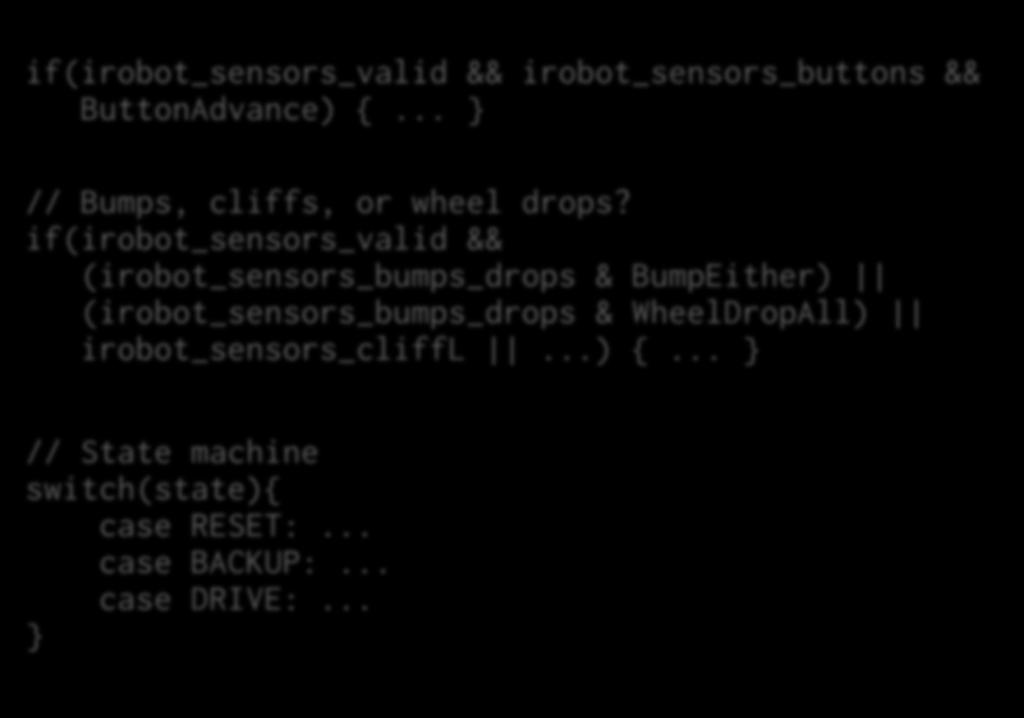
31 ADXL-322 accelerometer irobot sensors Buttons Bumpers Cliff sensors Use ISRs for accelerometer and sensor Bumpers Buttons Luminary Micro Accelerometer 32
32 ANALYSIS PHASE Compute context bound PROGRAM WITH n TASKS MEASUREMENT AND PREDICTION PHASE Compile Program for Platform Generate final sequential program Run timing analysis tool (GAMETIME) TEST SUITE Measure timing on Test Suite Predict timing properties (worst-case, distribution) 33
33 ANALYSIS PHASE Compute context bound PROGRAM WITH n TASKS MEASUREMENT AND PREDICTION PHASE Compile Program for Platform Generate final sequential program Run timing analysis tool (GAMETIME) TEST SUITE Measure timing on Test Suite Predict timing properties (worst-case, distribution) 34
34 Test suite are test cases that drive the program along basis paths in sequential code Each test case describes initial values for variables and the points where an interrupt should happen 35


35 Hardware Interrupt Can be modeled by setting a GPIO pin to high voltage, and wiring that high voltage to another GPIO pin. 36











36 Software Interrupt Can be modeled by embedding the ARM assembly instruction,, in the code. Modify the interrupt vector table to include our interrupt handler. Vector Table in Startup.s 37


37 We forced interrupts through software. Overhead for the call will add to context switch overhead. Programs timed with Timer wraps around after 16,777,261 cycles Upper bound on program execution time 38
38 ANALYSIS PHASE Compute context bound PROGRAM WITH n TASKS MEASUREMENT AND PREDICTION PHASE Compile Program for Platform Generate final sequential program Run timing analysis tool (GAMETIME) TEST SUITE Measure timing on Test Suite Predict timing properties (worst-case, distribution) 39
39 ANALYSIS PHASE Compute context bound PROGRAM WITH n TASKS MEASUREMENT AND PREDICTION PHASE Compile Program for Platform Generate final sequential program Run timing analysis tool (GAMETIME) TEST SUITE Measure timing on Test Suite Predict timing properties (worst-case, distribution) 40
40 With measurements, assign weights to edges in control-flow graph of sequential code Use weights to predict runtimes for other arbitrary inputs and interleavings 41
41 Name Lines of Code Nodes in CFG Edges in CFG Total number of paths Number of basis paths Context Bound Interrupt Interarrival Time modexp ms irobot ms irobot ms irobot μs irobot ms irobot ms 42




42 43
43 44
44 45
45 46
46 47
47 48
48 Under a certain set of reasonable assumptions, GAMETIME can be used to predict times for interrupt-driven programs. Ongoing/Future work Extend to other scheduling strategies. Expand evaluation to larger benchmarks with several ISRs. Analysis of energy consumption. 49
49 50
Timing Analysis of Interrupt-Driven Programs under Context Bounds
 Timing Analysis of Interrupt-Driven Programs under Context Bounds Jonathan Kotker Dorsa Sadigh Sanjit A. Seshia EECS Department, UC Berkeley jamhoot@eecs.berkeley.edu dsadigh@berkeley.edu sseshia@eecs.berkeley.edu
Timing Analysis of Interrupt-Driven Programs under Context Bounds Jonathan Kotker Dorsa Sadigh Sanjit A. Seshia EECS Department, UC Berkeley jamhoot@eecs.berkeley.edu dsadigh@berkeley.edu sseshia@eecs.berkeley.edu
Quantitative Verification and Synthesis of Systems
 Quantitative Verification and Synthesis of Systems Sanjit A. Seshia Assistant Professor EECS, UC Berkeley Software-at-Scale Workshop August 2010 Quantitative Analysis / Verification Does the brake-by-wire
Quantitative Verification and Synthesis of Systems Sanjit A. Seshia Assistant Professor EECS, UC Berkeley Software-at-Scale Workshop August 2010 Quantitative Analysis / Verification Does the brake-by-wire
Introduction to Embedded Systems
 Introduction to Embedded Systems Sanjit A. Seshia UC Berkeley EECS 9/9A Fall 0 008-0: E. A. Lee, A. L. Sangiovanni-Vincentelli, S. A. Seshia. All rights reserved. Chapter : Operating Systems, Microkernels,
Introduction to Embedded Systems Sanjit A. Seshia UC Berkeley EECS 9/9A Fall 0 008-0: E. A. Lee, A. L. Sangiovanni-Vincentelli, S. A. Seshia. All rights reserved. Chapter : Operating Systems, Microkernels,
Introduction to Embedded Systems
 Introduction to Embedded Systems Sanjit A. Seshia UC Berkeley EECS 149/249A Fall 2015 2008-2015: E. A. Lee, A. L. Sangiovanni-Vincentelli, S. A. Seshia. All rights reserved. Chapter 16: Quantitative (Execution
Introduction to Embedded Systems Sanjit A. Seshia UC Berkeley EECS 149/249A Fall 2015 2008-2015: E. A. Lee, A. L. Sangiovanni-Vincentelli, S. A. Seshia. All rights reserved. Chapter 16: Quantitative (Execution
Voting Machines and Automotive Software: Explorations with SMT at Scale
 Voting Machines and Automotive Software: Explorations with SMT at Scale Sanjit A. Seshia EECS Department UC Berkeley Joint work with: Bryan Brady, Randy Bryant, Susmit Jha, Jon Kotker, John O Leary, Alexander
Voting Machines and Automotive Software: Explorations with SMT at Scale Sanjit A. Seshia EECS Department UC Berkeley Joint work with: Bryan Brady, Randy Bryant, Susmit Jha, Jon Kotker, John O Leary, Alexander
Verification of Quantitative Properties of Embedded Systems: Execution Time Analysis. Sanjit A. Seshia UC Berkeley EECS 249 Fall 2009
 Verification of Quantitative Properties of Embedded Systems: Execution Time Analysis Sanjit A. Seshia UC Berkeley EECS 249 Fall 2009 Source Material in this lecture is drawn from the following sources:
Verification of Quantitative Properties of Embedded Systems: Execution Time Analysis Sanjit A. Seshia UC Berkeley EECS 249 Fall 2009 Source Material in this lecture is drawn from the following sources:
Interrupt response times on Arduino and Raspberry Pi. Tomaž Šolc
 Interrupt response times on Arduino and Raspberry Pi Tomaž Šolc tomaz.solc@ijs.si Introduction Full-featured Linux-based systems are replacing microcontrollers in some embedded applications for low volumes,
Interrupt response times on Arduino and Raspberry Pi Tomaž Šolc tomaz.solc@ijs.si Introduction Full-featured Linux-based systems are replacing microcontrollers in some embedded applications for low volumes,
6.1 Motivation. Fixed Priorities. 6.2 Context Switch. Real-time is about predictability, i.e. guarantees. Real-Time Systems
 Real-Time Systems Summer term 2017 6.1 Motivation 6.1 Motivation Real-Time Systems 6 th Chapter Practical Considerations Jafar Akhundov, M.Sc. Professur Betriebssysteme Real-time is about predictability,
Real-Time Systems Summer term 2017 6.1 Motivation 6.1 Motivation Real-Time Systems 6 th Chapter Practical Considerations Jafar Akhundov, M.Sc. Professur Betriebssysteme Real-time is about predictability,
Introduction to Real-Time Systems and Multitasking. Microcomputer Architecture and Interfacing Colorado School of Mines Professor William Hoff
 Introduction to Real-Time Systems and Multitasking Real-time systems Real-time system: A system that must respond to signals within explicit and bounded time requirements Categories Soft real-time system:
Introduction to Real-Time Systems and Multitasking Real-time systems Real-time system: A system that must respond to signals within explicit and bounded time requirements Categories Soft real-time system:
2. Introduction to Software for Embedded Systems
 2. Introduction to Software for Embedded Systems Lothar Thiele ETH Zurich, Switzerland 2-1 Contents of Lectures (Lothar Thiele) 1. Introduction to Embedded System Design 2. Software for Embedded Systems
2. Introduction to Software for Embedded Systems Lothar Thiele ETH Zurich, Switzerland 2-1 Contents of Lectures (Lothar Thiele) 1. Introduction to Embedded System Design 2. Software for Embedded Systems
Programmed I/O (busy( wait) ) method for ports and devices, and the need for interrupt driven IOs
 ) method for ports and devices, and the need for interrupt driven IOs") DEVICE DRIVERS AND INTERRUPTS SERVICE MECHANISM Lesson-1: Programmed I/O (busy( and wait) ) method for ports and devices, and the need for interrupt driven IOs 1 Programmed IOs approach from ports and
DEVICE DRIVERS AND INTERRUPTS SERVICE MECHANISM Lesson-1: Programmed I/O (busy( and wait) ) method for ports and devices, and the need for interrupt driven IOs 1 Programmed IOs approach from ports and
Laboratory 2(b): Configuring an ADC with MicroBlaze. Authors: Trung N. Tran (National Instruments) Jeff C. Jensen (National Instruments)
: Configuring an ADC with MicroBlaze. Authors: Trung N. Tran (National Instruments) Jeff C. Jensen (National Instruments)") Laboratory 2(b): Configuring an ADC with MicroBlaze Authors: Trung N. Tran (National Instruments) Jeff C. Jensen (National Instruments) Instructors: Edward A. Lee Sanjit A. Seshia University of California,
Laboratory 2(b): Configuring an ADC with MicroBlaze Authors: Trung N. Tran (National Instruments) Jeff C. Jensen (National Instruments) Instructors: Edward A. Lee Sanjit A. Seshia University of California,
Lecture notes Lectures 1 through 5 (up through lecture 5 slide 63) Book Chapters 1-4
 Book Chapters 1-4") EE445M Midterm Study Guide (Spring 2017) (updated February 25, 2017): Instructions: Open book and open notes. No calculators or any electronic devices (turn cell phones off). Please be sure that your answers
EE445M Midterm Study Guide (Spring 2017) (updated February 25, 2017): Instructions: Open book and open notes. No calculators or any electronic devices (turn cell phones off). Please be sure that your answers
Eliminating Stack Overflow by Abstract Interpretation
 Eliminating Stack Overflow by Abstract Interpretation Paper by John Regehr, Alastair Reid, and Kirk Webb ACM Transactions on Embedded Computing Systems, Nov 005 Truong Nghiem nghiem@seas.upenn.edu Outline
Eliminating Stack Overflow by Abstract Interpretation Paper by John Regehr, Alastair Reid, and Kirk Webb ACM Transactions on Embedded Computing Systems, Nov 005 Truong Nghiem nghiem@seas.upenn.edu Outline
Measuring Interrupt Latency
 NXP Semiconductors Document Number: AN12078 Application Note Rev. 0, 10/2017 Measuring Interrupt Latency 1. Introduction The term interrupt latency refers to the delay between the start of an Interrupt
NXP Semiconductors Document Number: AN12078 Application Note Rev. 0, 10/2017 Measuring Interrupt Latency 1. Introduction The term interrupt latency refers to the delay between the start of an Interrupt
AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel. Alexander Züpke, Marc Bommert, Daniel Lohmann
 AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel Alexander Züpke, Marc Bommert, Daniel Lohmann alexander.zuepke@hs-rm.de, marc.bommert@hs-rm.de, lohmann@cs.fau.de Motivation Automotive and Avionic industry
AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel Alexander Züpke, Marc Bommert, Daniel Lohmann alexander.zuepke@hs-rm.de, marc.bommert@hs-rm.de, lohmann@cs.fau.de Motivation Automotive and Avionic industry
Timing Analysis of Embedded Software for Families of Microarchitectures
 Analysis of Embedded Software for Families of Microarchitectures Jan Reineke, UC Berkeley Edward A. Lee, UC Berkeley Representing Distributed Sense and Control Systems (DSCS) theme of MuSyC With thanks
Analysis of Embedded Software for Families of Microarchitectures Jan Reineke, UC Berkeley Edward A. Lee, UC Berkeley Representing Distributed Sense and Control Systems (DSCS) theme of MuSyC With thanks
Keil uvision development story (Adapted from (Valvano, 2014a))
)") Introduction uvision has powerful tools for debugging and developing C and Assembly code. For debugging a code, one can either simulate it on the IDE s simulator or execute the code directly on ta Keil
Introduction uvision has powerful tools for debugging and developing C and Assembly code. For debugging a code, one can either simulate it on the IDE s simulator or execute the code directly on ta Keil
Lesson 5: Software for embedding in System- Part 2
 Lesson 5: Software for embedding in System- Part 2 Device drivers, Device manager, OS, RTOS and Software tools 1 Outline Device drivers Device manager Multitasking using an operating system (OS) and Real
Lesson 5: Software for embedding in System- Part 2 Device drivers, Device manager, OS, RTOS and Software tools 1 Outline Device drivers Device manager Multitasking using an operating system (OS) and Real
Advanced Parallel Architecture Lesson 3. Annalisa Massini /2015
 Advanced Parallel Architecture Lesson 3 Annalisa Massini - Von Neumann Architecture 2 Two lessons Summary of the traditional computer architecture Von Neumann architecture http://williamstallings.com/coa/coa7e.html
Advanced Parallel Architecture Lesson 3 Annalisa Massini - Von Neumann Architecture 2 Two lessons Summary of the traditional computer architecture Von Neumann architecture http://williamstallings.com/coa/coa7e.html
Issues in Programming Language Design for Embedded RT Systems
 CSE 237B Fall 2009 Issues in Programming Language Design for Embedded RT Systems Reliability and Fault Tolerance Exceptions and Exception Handling Rajesh Gupta University of California, San Diego ES Characteristics
CSE 237B Fall 2009 Issues in Programming Language Design for Embedded RT Systems Reliability and Fault Tolerance Exceptions and Exception Handling Rajesh Gupta University of California, San Diego ES Characteristics
Computer Science. ! Other approaches:! Special systems designed for extensibility
 Application-Specific Service Technologies for Commodity OSes in Real-Time Environments Richard West and Gabriel Parmer Boston University Boston, MA {richwest,gabep1}@cs.bu.edu Introduction! Leverage commodity
Application-Specific Service Technologies for Commodity OSes in Real-Time Environments Richard West and Gabriel Parmer Boston University Boston, MA {richwest,gabep1}@cs.bu.edu Introduction! Leverage commodity
CODE TIME TECHNOLOGIES. Abassi RTOS. Porting Document. ARM Cortex-M3 CCS
 CODE TIME TECHNOLOGIES Abassi RTOS Porting Document ARM Cortex-M3 CCS Copyright Information This document is copyright Code Time Technologies Inc. 2011,2012. All rights reserved. No part of this document
CODE TIME TECHNOLOGIES Abassi RTOS Porting Document ARM Cortex-M3 CCS Copyright Information This document is copyright Code Time Technologies Inc. 2011,2012. All rights reserved. No part of this document
Exam TI2720-C/TI2725-C Embedded Software
 Exam TI2720-C/TI2725-C Embedded Software Wednesday April 16 2014 (18.30-21.30) Koen Langendoen In order to avoid misunderstanding on the syntactical correctness of code fragments in this examination, we
Exam TI2720-C/TI2725-C Embedded Software Wednesday April 16 2014 (18.30-21.30) Koen Langendoen In order to avoid misunderstanding on the syntactical correctness of code fragments in this examination, we
Analyzing Data-Dependent Timing and Timing Repeatability with GameTime
 Analyzing Data-Dependent Timing and Timing Repeatability with GameTime Zachariah Wasson Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2014-132
Analyzing Data-Dependent Timing and Timing Repeatability with GameTime Zachariah Wasson Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2014-132
EN1640: Design of Computing Systems Topic 07: I/O
 EN1640: Design of Computing Systems Topic 07: I/O Professor Sherief Reda http://scale.engin.brown.edu Electrical Sciences and Computer Engineering School of Engineering Brown University Spring 2017 [ material
EN1640: Design of Computing Systems Topic 07: I/O Professor Sherief Reda http://scale.engin.brown.edu Electrical Sciences and Computer Engineering School of Engineering Brown University Spring 2017 [ material
Memory Hierarchy Basics
 Computer Architecture A Quantitative Approach, Fifth Edition Chapter 2 Memory Hierarchy Design 1 Memory Hierarchy Basics Six basic cache optimizations: Larger block size Reduces compulsory misses Increases
Computer Architecture A Quantitative Approach, Fifth Edition Chapter 2 Memory Hierarchy Design 1 Memory Hierarchy Basics Six basic cache optimizations: Larger block size Reduces compulsory misses Increases
In examining performance Interested in several things Exact times if computable Bounded times if exact not computable Can be measured
 System Performance Analysis Introduction Performance Means many things to many people Important in any design Critical in real time systems 1 ns can mean the difference between system Doing job expected
System Performance Analysis Introduction Performance Means many things to many people Important in any design Critical in real time systems 1 ns can mean the difference between system Doing job expected
Introduction to Embedded Systems
 Introduction to Embedded Systems Edward A. Lee & Sanjit A. Seshia UC Berkeley EECS 124 Spring 2008 Copyright 2008, Edward A. Lee & Sanjit A. Seshia, All rights reserved Lecture 19: Execution Time Analysis
Introduction to Embedded Systems Edward A. Lee & Sanjit A. Seshia UC Berkeley EECS 124 Spring 2008 Copyright 2008, Edward A. Lee & Sanjit A. Seshia, All rights reserved Lecture 19: Execution Time Analysis
Real-Time Scheduling. Dynamic Priority Servers
 Real-Time Scheduling Dynamic Priority Servers Objectives Schedule soft aperiodic and hard periodic tasks Reduce average response time of aperiodic requests without compromising schedulability of periodic
Real-Time Scheduling Dynamic Priority Servers Objectives Schedule soft aperiodic and hard periodic tasks Reduce average response time of aperiodic requests without compromising schedulability of periodic
Multicore for safety-critical embedded systems: challenges andmarch opportunities 15, / 28
 Multicore for safety-critical embedded systems: challenges and opportunities Giuseppe Lipari CRItAL - Émeraude March 15, 2016 Multicore for safety-critical embedded systems: challenges andmarch opportunities
Multicore for safety-critical embedded systems: challenges and opportunities Giuseppe Lipari CRItAL - Émeraude March 15, 2016 Multicore for safety-critical embedded systems: challenges andmarch opportunities
Green Hills Software, Inc.
 Green Hills Software, Inc. A Safe Tasking Approach to Ada95 Jim Gleason Engineering Manager Ada Products 5.0-1 Overview Multiple approaches to safe tasking with Ada95 No Tasking - SPARK Ada95 Restricted
Green Hills Software, Inc. A Safe Tasking Approach to Ada95 Jim Gleason Engineering Manager Ada Products 5.0-1 Overview Multiple approaches to safe tasking with Ada95 No Tasking - SPARK Ada95 Restricted
Portable Real-Time Code from PTIDES Models
 Portable Real-Time Code from PTIDES Models Patricia Derler, John Eidson, Edward A. Lee, Slobodan Matic, Christos Stergiou, Michael Zimmer UC Berkeley Invited Talk Workshop on Time Analysis and Model-Based
Portable Real-Time Code from PTIDES Models Patricia Derler, John Eidson, Edward A. Lee, Slobodan Matic, Christos Stergiou, Michael Zimmer UC Berkeley Invited Talk Workshop on Time Analysis and Model-Based
AC OB S. Multi-threaded FW framework (OS) for embedded ARM systems Torsten Jaekel, June 2014
 for embedded ARM systems Torsten Jaekel, June 2014") AC OB S Multi-threaded FW framework (OS) for embedded ARM systems Torsten Jaekel, June 2014 ACOBS ACtive OBject (operating) System Simplified FW System for Multi-Threading on ARM embedded systems ACOBS
AC OB S Multi-threaded FW framework (OS) for embedded ARM systems Torsten Jaekel, June 2014 ACOBS ACtive OBject (operating) System Simplified FW System for Multi-Threading on ARM embedded systems ACOBS
RTA-OSEK Texas Instruments TMS470R1x with the TI Compiler
 RTA-OSEK Texas Instruments TMS470R1x with the TI Compiler Features at a Glance OSEK/VDX OS v2.2 Certified OS RTOS overhead: 30 bytes RAM, 144 bytes ROM Category 2 interrupt latency: 87 CPU cycles Applications
RTA-OSEK Texas Instruments TMS470R1x with the TI Compiler Features at a Glance OSEK/VDX OS v2.2 Certified OS RTOS overhead: 30 bytes RAM, 144 bytes ROM Category 2 interrupt latency: 87 CPU cycles Applications
ANALYSIS OF A DYNAMIC FREQUENCY SCALING ALGORTIHM ON XSCALE.
 ANALYSIS OF A DYNAMIC FREQUENCY SCALING ALGORTIHM ON XSCALE. Group 9 Ishdeep Singh Sawhney (issawhne@unity.ncsu.edu) Shobhit Kanaujia (sokanauj@unity.ncsu.edu) Prasanth Ganesan (pganesa@unity.ncsu.edu)
ANALYSIS OF A DYNAMIC FREQUENCY SCALING ALGORTIHM ON XSCALE. Group 9 Ishdeep Singh Sawhney (issawhne@unity.ncsu.edu) Shobhit Kanaujia (sokanauj@unity.ncsu.edu) Prasanth Ganesan (pganesa@unity.ncsu.edu)
ait: WORST-CASE EXECUTION TIME PREDICTION BY STATIC PROGRAM ANALYSIS
 ait: WORST-CASE EXECUTION TIME PREDICTION BY STATIC PROGRAM ANALYSIS Christian Ferdinand and Reinhold Heckmann AbsInt Angewandte Informatik GmbH, Stuhlsatzenhausweg 69, D-66123 Saarbrucken, Germany info@absint.com
ait: WORST-CASE EXECUTION TIME PREDICTION BY STATIC PROGRAM ANALYSIS Christian Ferdinand and Reinhold Heckmann AbsInt Angewandte Informatik GmbH, Stuhlsatzenhausweg 69, D-66123 Saarbrucken, Germany info@absint.com
Learning Module 9. Managing the Sensor: Embedded Computing. Paul Flikkema. Department of Electrical Engineering Northern Arizona University
 Learning Module 9 Managing the Sensor: Embedded Computing Paul Flikkema Department of Electrical Engineering Northern Arizona University Outline Networked Embedded Systems Hardware Software Languages Operating
Learning Module 9 Managing the Sensor: Embedded Computing Paul Flikkema Department of Electrical Engineering Northern Arizona University Outline Networked Embedded Systems Hardware Software Languages Operating
Verifying Periodic Programs with Priority Inheritance Locks
 Verifying Periodic Programs with Priority Inheritance Locks Sagar Chaki, Arie Gurfinkel, Ofer Strichman FMCAD, October, 03 Software Engineering Institute, CMU Technion, Israel Institute of Technology Copyright
Verifying Periodic Programs with Priority Inheritance Locks Sagar Chaki, Arie Gurfinkel, Ofer Strichman FMCAD, October, 03 Software Engineering Institute, CMU Technion, Israel Institute of Technology Copyright
Design and Analysis of Time-Critical Systems Introduction
 Design and Analysis of Time-Critical Systems Introduction Jan Reineke @ saarland university ACACES Summer School 2017 Fiuggi, Italy computer science Structure of this Course 2. How are they implemented?
Design and Analysis of Time-Critical Systems Introduction Jan Reineke @ saarland university ACACES Summer School 2017 Fiuggi, Italy computer science Structure of this Course 2. How are they implemented?
Computer System Overview. Chapter 1
 Computer System Overview Chapter 1 Operating System Exploits the hardware resources of one or more processors Provides a set of services to system users Manages secondary memory and I/O devices Basic Elements
Computer System Overview Chapter 1 Operating System Exploits the hardware resources of one or more processors Provides a set of services to system users Manages secondary memory and I/O devices Basic Elements
Introduction to Real-Time Communications. Real-Time and Embedded Systems (M) Lecture 15
 Lecture 15") Introduction to Real-Time Communications Real-Time and Embedded Systems (M) Lecture 15 Lecture Outline Modelling real-time communications Traffic and network models Properties of networks Throughput, delay
Introduction to Real-Time Communications Real-Time and Embedded Systems (M) Lecture 15 Lecture Outline Modelling real-time communications Traffic and network models Properties of networks Throughput, delay
Lazy Preemption to Enable Path-Based Analysis of Interrupt-Driven Code
 Lazy Preemption to Enable Path-Based Analysis of Interrupt-Driven Code Wei Le, Jing Yang, Mary Lou Soffa and Kamin Whitehouse Department of Computer Science University of Virginia Charlottesville, Virginia
Lazy Preemption to Enable Path-Based Analysis of Interrupt-Driven Code Wei Le, Jing Yang, Mary Lou Soffa and Kamin Whitehouse Department of Computer Science University of Virginia Charlottesville, Virginia
JOP: A Java Optimized Processor for Embedded Real-Time Systems. Martin Schoeberl
 JOP: A Java Optimized Processor for Embedded Real-Time Systems Martin Schoeberl JOP Research Targets Java processor Time-predictable architecture Small design Working solution (FPGA) JOP Overview 2 Overview
JOP: A Java Optimized Processor for Embedded Real-Time Systems Martin Schoeberl JOP Research Targets Java processor Time-predictable architecture Small design Working solution (FPGA) JOP Overview 2 Overview
Non-Blocking Inter-Partition Communication with Wait-Free Pair Transactions
 Non-Blocking Inter-Partition Communication with Wait-Free Pair Transactions Ethan Blanton and Lukasz Ziarek Fiji Systems, Inc. October 10 th, 2013 WFPT Overview Wait-Free Pair Transactions A communication
Non-Blocking Inter-Partition Communication with Wait-Free Pair Transactions Ethan Blanton and Lukasz Ziarek Fiji Systems, Inc. October 10 th, 2013 WFPT Overview Wait-Free Pair Transactions A communication
Introduction to Real-time Systems. Advanced Operating Systems (M) Lecture 2
 Lecture 2") Introduction to Real-time Systems Advanced Operating Systems (M) Lecture 2 Introduction to Real-time Systems Real-time systems deliver services while meeting some timing constraints Not necessarily fast,
Introduction to Real-time Systems Advanced Operating Systems (M) Lecture 2 Introduction to Real-time Systems Real-time systems deliver services while meeting some timing constraints Not necessarily fast,
Real-Time Cache Management for Multi-Core Virtualization
 Real-Time Cache Management for Multi-Core Virtualization Hyoseung Kim 1,2 Raj Rajkumar 2 1 University of Riverside, California 2 Carnegie Mellon University Benefits of Multi-Core Processors Consolidation
Real-Time Cache Management for Multi-Core Virtualization Hyoseung Kim 1,2 Raj Rajkumar 2 1 University of Riverside, California 2 Carnegie Mellon University Benefits of Multi-Core Processors Consolidation
Fault-Based Attack of RSA Authentication
 Fault-Based Attack of RSA Authentication, Valeria Bertacco and Todd Austin 1 Cryptography: Applications 2 Value of Cryptography $2.1 billions 1,300 employees $1.5 billions 4,000 employees $8.7 billions
Fault-Based Attack of RSA Authentication, Valeria Bertacco and Todd Austin 1 Cryptography: Applications 2 Value of Cryptography $2.1 billions 1,300 employees $1.5 billions 4,000 employees $8.7 billions
Priority Based Assignment of Shared resources in RTOS
 RESEARCH ARTICLE OPEN ACCESS Priority Based Assignment of Shared resources in RTOS Ms. Raana Syeda*, Ms. Manju Ahuja**, Ms. Sneha Khatwani*** Mrs. Swara Pampatwar**** *(Department of Computer Science &
RESEARCH ARTICLE OPEN ACCESS Priority Based Assignment of Shared resources in RTOS Ms. Raana Syeda*, Ms. Manju Ahuja**, Ms. Sneha Khatwani*** Mrs. Swara Pampatwar**** *(Department of Computer Science &
Efficiency and memory footprint of Xilkernel for the Microblaze soft processor
 Efficiency and memory footprint of Xilkernel for the Microblaze soft processor Dariusz Caban, Institute of Informatics, Gliwice, Poland - June 18, 2014 The use of a real-time multitasking kernel simplifies
Efficiency and memory footprint of Xilkernel for the Microblaze soft processor Dariusz Caban, Institute of Informatics, Gliwice, Poland - June 18, 2014 The use of a real-time multitasking kernel simplifies
Embedded Systems Lecture 11: Worst-Case Execution Time. Björn Franke University of Edinburgh
 Embedded Systems Lecture 11: Worst-Case Execution Time Björn Franke University of Edinburgh Overview Motivation Worst-Case Execution Time Analysis Types of Execution Times Measuring vs. Analysing Flow
Embedded Systems Lecture 11: Worst-Case Execution Time Björn Franke University of Edinburgh Overview Motivation Worst-Case Execution Time Analysis Types of Execution Times Measuring vs. Analysing Flow
CprE 288 Introduction to Embedded Systems (Project and Platform Overview)
") CprE 288 Introduction to Embedded Systems (Project and Platform Overview) Instructor: Dr. Phillip Jones http://class.ece.iastate.edu/cpre288 1 Overview of Today s Lecture Announcements What are Embedded
CprE 288 Introduction to Embedded Systems (Project and Platform Overview) Instructor: Dr. Phillip Jones http://class.ece.iastate.edu/cpre288 1 Overview of Today s Lecture Announcements What are Embedded
Dynamic Voltage Scaling of Periodic and Aperiodic Tasks in Priority-Driven Systems Λ
 Dynamic Voltage Scaling of Periodic and Aperiodic Tasks in Priority-Driven Systems Λ Dongkun Shin Jihong Kim School of CSE School of CSE Seoul National University Seoul National University Seoul, Korea
Dynamic Voltage Scaling of Periodic and Aperiodic Tasks in Priority-Driven Systems Λ Dongkun Shin Jihong Kim School of CSE School of CSE Seoul National University Seoul National University Seoul, Korea
Predictable Programming on a Precision Timed Architecture
 Predictable Programming on a Precision Timed Architecture Ben Lickly, Isaac Liu, Hiren Patel, Edward Lee, University of California, Berkeley Sungjun Kim, Stephen Edwards, Columbia University, New York
Predictable Programming on a Precision Timed Architecture Ben Lickly, Isaac Liu, Hiren Patel, Edward Lee, University of California, Berkeley Sungjun Kim, Stephen Edwards, Columbia University, New York
RTA-OSEK Texas Instruments TMS570 with the TI Compiler
 RTA-OSEK Texas Instruments TMS570 with the TI Compiler Features at a Glance OSEK/VDX OS v2.2 Certified OS RTOS overhead: 28 bytes RAM, 176 bytes ROM Category 2 interrupt latency: 214 CPU cycles Applications
RTA-OSEK Texas Instruments TMS570 with the TI Compiler Features at a Glance OSEK/VDX OS v2.2 Certified OS RTOS overhead: 28 bytes RAM, 176 bytes ROM Category 2 interrupt latency: 214 CPU cycles Applications
Migrating to Cortex-M3 Microcontrollers: an RTOS Perspective
 Migrating to Cortex-M3 Microcontrollers: an RTOS Perspective Microcontroller devices based on the ARM Cortex -M3 processor specifically target real-time applications that run several tasks in parallel.
Migrating to Cortex-M3 Microcontrollers: an RTOS Perspective Microcontroller devices based on the ARM Cortex -M3 processor specifically target real-time applications that run several tasks in parallel.
EXAM (Tentamen) TDDI11 Embedded Software. Good Luck! :00-12:00. On-call (jour): Admitted material: General instructions:
 TDDI11 Embedded Software. Good Luck! :00-12:00. On-call (jour): Admitted material: General instructions:") On-call (jour): Mikael Asplund, 013-282668 EXAM (Tentamen) TDDI11 Embedded Software 2016-08-17 08:00-12:00 Admitted material: Dictionary from English to your native language General instructions: The assignments
On-call (jour): Mikael Asplund, 013-282668 EXAM (Tentamen) TDDI11 Embedded Software 2016-08-17 08:00-12:00 Admitted material: Dictionary from English to your native language General instructions: The assignments
General Objectives: To understand the process management in operating system. Specific Objectives: At the end of the unit you should be able to:
 F2007/Unit5/1 UNIT 5 OBJECTIVES General Objectives: To understand the process management in operating system Specific Objectives: At the end of the unit you should be able to: define program, process and
F2007/Unit5/1 UNIT 5 OBJECTIVES General Objectives: To understand the process management in operating system Specific Objectives: At the end of the unit you should be able to: define program, process and
Time Triggered and Event Triggered; Off-line Scheduling
 Time Triggered and Event Triggered; Off-line Scheduling Real-Time Architectures -TUe Gerhard Fohler 2004 Mälardalen University, Sweden gerhard.fohler@mdh.se Real-time: TT and ET Gerhard Fohler 2004 1 Activation
Time Triggered and Event Triggered; Off-line Scheduling Real-Time Architectures -TUe Gerhard Fohler 2004 Mälardalen University, Sweden gerhard.fohler@mdh.se Real-time: TT and ET Gerhard Fohler 2004 1 Activation
Computer System Overview
 Computer System Overview Chapter 1 Muhammad Adri, MT 1 Operating System Exploits the hardware resources of one or more processors Provides a set of services to system users Manages secondary memory and
Computer System Overview Chapter 1 Muhammad Adri, MT 1 Operating System Exploits the hardware resources of one or more processors Provides a set of services to system users Manages secondary memory and
4/6/2011. Informally, scheduling is. Informally, scheduling is. More precisely, Periodic and Aperiodic. Periodic Task. Periodic Task (Contd.
 So far in CS4271 Functionality analysis Modeling, Model Checking Timing Analysis Software level WCET analysis System level Scheduling methods Today! erformance Validation Systems CS 4271 Lecture 10 Abhik
So far in CS4271 Functionality analysis Modeling, Model Checking Timing Analysis Software level WCET analysis System level Scheduling methods Today! erformance Validation Systems CS 4271 Lecture 10 Abhik
EE458 - Embedded Systems Exceptions and Interrupts
 EE458 - Embedded Systems Exceptions and Interrupts Outline Exceptions Interrupts References RTC: Chapters 10 CUG: Chapters 8, 21, 23 1 Introduction An exception is any event that disrupts the normal execution
EE458 - Embedded Systems Exceptions and Interrupts Outline Exceptions Interrupts References RTC: Chapters 10 CUG: Chapters 8, 21, 23 1 Introduction An exception is any event that disrupts the normal execution
Programming Languages for Real-Time Systems. LS 12, TU Dortmund
 Programming Languages for Real-Time Systems Prof. Dr. Jian-Jia Chen LS 12, TU Dortmund 20 June 2016 Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 1 / 41 References Slides are based on Prof. Wang Yi, Prof.
Programming Languages for Real-Time Systems Prof. Dr. Jian-Jia Chen LS 12, TU Dortmund 20 June 2016 Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 1 / 41 References Slides are based on Prof. Wang Yi, Prof.
System Architecture Directions for Networked Sensors[1]
![System Architecture Directions for Networked Sensors[1]](/thumbs/81/84408104.jpg "System Architecture Directions for Networked Sensors[1]") System Architecture Directions for Networked Sensors[1] Secure Sensor Networks Seminar presentation Eric Anderson System Architecture Directions for Networked Sensors[1] p. 1 Outline Sensor Network Characteristics
System Architecture Directions for Networked Sensors[1] Secure Sensor Networks Seminar presentation Eric Anderson System Architecture Directions for Networked Sensors[1] p. 1 Outline Sensor Network Characteristics
CS A331 Programming Language Concepts
 CS A331 Programming Language Concepts Lecture 12 Alternative Language Examples (General Concurrency Issues and Concepts) March 30, 2014 Sam Siewert Major Concepts Concurrent Processing Processes, Tasks,
CS A331 Programming Language Concepts Lecture 12 Alternative Language Examples (General Concurrency Issues and Concepts) March 30, 2014 Sam Siewert Major Concepts Concurrent Processing Processes, Tasks,
C Code Generation from the Giotto Model of Computation to the PRET Architecture
 C Code Generation from the Giotto Model of Computation to the PRET Architecture Shanna-Shaye Forbes Ben Lickly Man-Kit Leung Electrical Engineering and Computer Sciences University of California at Berkeley
C Code Generation from the Giotto Model of Computation to the PRET Architecture Shanna-Shaye Forbes Ben Lickly Man-Kit Leung Electrical Engineering and Computer Sciences University of California at Berkeley
RTA-OSEK. fåñáåéçå=qêá`çêé=ñ~ãáäó=ïáíü=íüé=q~ëâáåö=`çãéáäéê. cé~íìêéë=~í=~=dä~ååé. oq^jlpbh. `çãéáäéêl^ëëéãääéêliáåâéê.
 RTA-OSEK fåñáåéçå=qêá`çêé=ñ~ãáäó=ïáíü=íüé=q~ëâáåö=`çãéáäéê cé~íìêéë=~í=~=dä~ååé OSEK/VDX OS version 2.2 certified OS RTOS overhead: 28 bytes RAM, 192 bytes ROM Category 2 interrupt latency: 33 CPU cycles
RTA-OSEK fåñáåéçå=qêá`çêé=ñ~ãáäó=ïáíü=íüé=q~ëâáåö=`çãéáäéê cé~íìêéë=~í=~=dä~ååé OSEK/VDX OS version 2.2 certified OS RTOS overhead: 28 bytes RAM, 192 bytes ROM Category 2 interrupt latency: 33 CPU cycles
Low-power Architecture. By: Jonathan Herbst Scott Duntley
 Low-power Architecture By: Jonathan Herbst Scott Duntley Why low power? Has become necessary with new-age demands: o Increasing design complexity o Demands of and for portable equipment Communication Media
Low-power Architecture By: Jonathan Herbst Scott Duntley Why low power? Has become necessary with new-age demands: o Increasing design complexity o Demands of and for portable equipment Communication Media
CS 471 Operating Systems. Yue Cheng. George Mason University Fall 2017
 CS 471 Operating Systems Yue Cheng George Mason University Fall 2017 Outline o Process concept o Process creation o Process states and scheduling o Preemption and context switch o Inter-process communication
CS 471 Operating Systems Yue Cheng George Mason University Fall 2017 Outline o Process concept o Process creation o Process states and scheduling o Preemption and context switch o Inter-process communication
Microkernel/OS and Real-Time Scheduling
 Chapter 12 Microkernel/OS and Real-Time Scheduling Hongwei Zhang http://www.cs.wayne.edu/~hzhang/ Ack.: this lecture is prepared in part based on slides of Lee, Sangiovanni-Vincentelli, Seshia. Outline
Chapter 12 Microkernel/OS and Real-Time Scheduling Hongwei Zhang http://www.cs.wayne.edu/~hzhang/ Ack.: this lecture is prepared in part based on slides of Lee, Sangiovanni-Vincentelli, Seshia. Outline
Interrupts in Zynq Systems
 Interrupts in Zynq Systems C r i s t i a n S i s t e r n a U n i v e r s i d a d N a c i o n a l d e S a n J u a n A r g e n t i n a Exception / Interrupt Special condition that requires a processor's
Interrupts in Zynq Systems C r i s t i a n S i s t e r n a U n i v e r s i d a d N a c i o n a l d e S a n J u a n A r g e n t i n a Exception / Interrupt Special condition that requires a processor's
OPERATING SYSTEMS. Systems with Multi-programming. CS 3502 Spring Chapter 4
 OPERATING SYSTEMS CS 3502 Spring 2018 Systems with Multi-programming Chapter 4 Multiprogramming - Review An operating system can support several processes in memory. While one process receives service
OPERATING SYSTEMS CS 3502 Spring 2018 Systems with Multi-programming Chapter 4 Multiprogramming - Review An operating system can support several processes in memory. While one process receives service
TinyOS. Lecture Overview. UC Berkeley Family of Motes. Mica2 and Mica2Dot. MTS300CA Sensor Board. Programming Board (MIB510) 1.
 1.") Lecture Overview TinyOS Computer Network Programming Wenyuan Xu 1 2 UC Berkeley Family of Motes Mica2 and Mica2Dot ATmega128 CPU Self-programming 128KB Instruction EEPROM 4KB Data EEPROM Chipcon CC1000
Lecture Overview TinyOS Computer Network Programming Wenyuan Xu 1 2 UC Berkeley Family of Motes Mica2 and Mica2Dot ATmega128 CPU Self-programming 128KB Instruction EEPROM 4KB Data EEPROM Chipcon CC1000
Achieving Predictable Multicore Execution of Automotive Applications Using the LET Paradigm
 Achieving Predictable Multicore Execution of Automotive Applications Using the LET Paradigm Alessandro Biondi and Marco Di Natale Scuola Superiore Sant Anna, Pisa, Italy Introduction The introduction of
Achieving Predictable Multicore Execution of Automotive Applications Using the LET Paradigm Alessandro Biondi and Marco Di Natale Scuola Superiore Sant Anna, Pisa, Italy Introduction The introduction of
Interrupts (Exceptions) (From LM3S1968) Gary J. Minden August 29, 2016
 (From LM3S1968) Gary J. Minden August 29, 2016") Interrupts (Exceptions) (From LM3S1968) Gary J. Minden August 29, 2016 1 Interrupts Motivation Implementation Material from Stellaris LM3S1968 Micro-controller Datasheet Sections 2.5 and 2.6 2 Motivation
Interrupts (Exceptions) (From LM3S1968) Gary J. Minden August 29, 2016 1 Interrupts Motivation Implementation Material from Stellaris LM3S1968 Micro-controller Datasheet Sections 2.5 and 2.6 2 Motivation
A Server-based Approach for Predictable GPU Access Control
 A Server-based Approach for Predictable GPU Access Control Hyoseung Kim * Pratyush Patel Shige Wang Raj Rajkumar * University of California, Riverside Carnegie Mellon University General Motors R&D Benefits
A Server-based Approach for Predictable GPU Access Control Hyoseung Kim * Pratyush Patel Shige Wang Raj Rajkumar * University of California, Riverside Carnegie Mellon University General Motors R&D Benefits
Embedded Software Programming
 Embedded Software Programming Computer Science & Engineering Department Arizona State University Tempe, AZ 85287 Dr. Yann-Hang Lee yhlee@asu.edu (480) 727-7507 Event and Time-Driven Threads taskspawn (name,
Embedded Software Programming Computer Science & Engineering Department Arizona State University Tempe, AZ 85287 Dr. Yann-Hang Lee yhlee@asu.edu (480) 727-7507 Event and Time-Driven Threads taskspawn (name,
Embedded Systems. Octav Chipara. Thursday, September 13, 12
 Embedded Systems Octav Chipara Caught between two worlds Embedded systems PC world 2 What are embedded systems? Any device that includes a computer (but you don t think of it as a computer) iphone digital
Embedded Systems Octav Chipara Caught between two worlds Embedded systems PC world 2 What are embedded systems? Any device that includes a computer (but you don t think of it as a computer) iphone digital
CS533 Concepts of Operating Systems. Jonathan Walpole
 CS533 Concepts of Operating Systems Jonathan Walpole Overview Background Criticism of Threads Defense of Threads Compiler Support for Threads Evaluation Conclusion Background: Events Small, static number
CS533 Concepts of Operating Systems Jonathan Walpole Overview Background Criticism of Threads Defense of Threads Compiler Support for Threads Evaluation Conclusion Background: Events Small, static number
Wireless Sensor Networks (WSN)
") Wireless Sensor Networks (WSN) Operating Systems M. Schölzel Operating System Tasks Traditional OS Controlling and protecting access to resources (memory, I/O, computing resources) managing their allocation
Wireless Sensor Networks (WSN) Operating Systems M. Schölzel Operating System Tasks Traditional OS Controlling and protecting access to resources (memory, I/O, computing resources) managing their allocation
SWE 760 Lecture 1: Introduction to Analysis & Design of Real-Time Embedded Systems
 SWE 760 Lecture 1: Introduction to Analysis & Design of Real-Time Embedded Systems Hassan Gomaa References: H. Gomaa, Chapters 1, 2, 3 - Real-Time Software Design for Embedded Systems, Cambridge University
SWE 760 Lecture 1: Introduction to Analysis & Design of Real-Time Embedded Systems Hassan Gomaa References: H. Gomaa, Chapters 1, 2, 3 - Real-Time Software Design for Embedded Systems, Cambridge University
CEC 450 Real-Time Systems
 CEC 450 Real-Time Systems Lecture 6 Accounting for I/O Latency September 28, 2015 Sam Siewert A Service Release and Response C i WCET Input/Output Latency Interference Time Response Time = Time Actuation
CEC 450 Real-Time Systems Lecture 6 Accounting for I/O Latency September 28, 2015 Sam Siewert A Service Release and Response C i WCET Input/Output Latency Interference Time Response Time = Time Actuation
Design and Implementation Interrupt Mechanism
 Design and Implementation Interrupt Mechanism 1 Module Overview Study processor interruption; Design and implement of an interrupt mechanism which responds to interrupts from timer and UART; Program interrupt
Design and Implementation Interrupt Mechanism 1 Module Overview Study processor interruption; Design and implement of an interrupt mechanism which responds to interrupts from timer and UART; Program interrupt
Main Points of the Computer Organization and System Software Module
 Main Points of the Computer Organization and System Software Module You can find below the topics we have covered during the COSS module. Reading the relevant parts of the textbooks is essential for a
Main Points of the Computer Organization and System Software Module You can find below the topics we have covered during the COSS module. Reading the relevant parts of the textbooks is essential for a
Concurrent and Distributed Systems Introduction
 Concurrent and Distributed Systems 8 lectures on concurrency control in centralised systems - interaction of components in main memory - interactions involving main memory and persistent storage (concurrency
Concurrent and Distributed Systems 8 lectures on concurrency control in centralised systems - interaction of components in main memory - interactions involving main memory and persistent storage (concurrency
Accelerating Dynamic Binary Translation with GPUs
 Accelerating Dynamic Binary Translation with GPUs Chung Hwan Kim, Srikanth Manikarnike, Vaibhav Sharma, Eric Eide, Robert Ricci School of Computing, University of Utah {chunghwn,smanikar,vaibhavs,eeide,ricci}@utah.edu
Accelerating Dynamic Binary Translation with GPUs Chung Hwan Kim, Srikanth Manikarnike, Vaibhav Sharma, Eric Eide, Robert Ricci School of Computing, University of Utah {chunghwn,smanikar,vaibhavs,eeide,ricci}@utah.edu
StackAnalyzer Proving the Absence of Stack Overflows
 StackAnalyzer Proving the Absence of Stack Overflows AbsInt GmbH 2012 2 Functional Safety Demonstration of functional correctness Well-defined criteria Automated and/or model-based testing Formal techniques:
StackAnalyzer Proving the Absence of Stack Overflows AbsInt GmbH 2012 2 Functional Safety Demonstration of functional correctness Well-defined criteria Automated and/or model-based testing Formal techniques:
Task Based Programming Revisited Real Time Operating Systems
 ECE3411 Fall 2016 Lecture 6a. Task Based Programming Revisited Real Time Operating Systems Marten van Dijk, Syed Kamran Haider Department of Electrical & Computer Engineering University of Connecticut
ECE3411 Fall 2016 Lecture 6a. Task Based Programming Revisited Real Time Operating Systems Marten van Dijk, Syed Kamran Haider Department of Electrical & Computer Engineering University of Connecticut
Overview. Sporadic tasks. Recall. Aperiodic tasks. Real-time Systems D0003E 2/26/2009. Loosening D = T. Aperiodic tasks. Response-time analysis
 Overview Real-time Systems D0003E Lecture 11: Priority inversion Burns/Wellings ch. 13 (except 13.12) Aperiodic tasks Response time analysis Blocking Priority inversion Priority inheritance Priority ceiling
Overview Real-time Systems D0003E Lecture 11: Priority inversion Burns/Wellings ch. 13 (except 13.12) Aperiodic tasks Response time analysis Blocking Priority inversion Priority inheritance Priority ceiling
CHESS: Analysis and Testing of Concurrent Programs
 CHESS: Analysis and Testing of Concurrent Programs Sebastian Burckhardt, Madan Musuvathi, Shaz Qadeer Microsoft Research Joint work with Tom Ball, Peli de Halleux, and interns Gerard Basler (ETH Zurich),
CHESS: Analysis and Testing of Concurrent Programs Sebastian Burckhardt, Madan Musuvathi, Shaz Qadeer Microsoft Research Joint work with Tom Ball, Peli de Halleux, and interns Gerard Basler (ETH Zurich),
Accelerometer-Based Musical Instrument
 Accelerometer Music Instrument University of Texas at Austin TI Innovation Challenge 2015 Project Report Team Leader: Team Members: Advising Professor: Video Texas Instruments Mentor (if applicable): Date:12/13/2014
Accelerometer Music Instrument University of Texas at Austin TI Innovation Challenge 2015 Project Report Team Leader: Team Members: Advising Professor: Video Texas Instruments Mentor (if applicable): Date:12/13/2014
Case Study: Interrupt-less Servo Motor Controls for Pneumatic Pump in Safety Critical Devices
 , pp. 141-148 http://dx.doi.org/10.14257/ijseia.2016.10.3.13 Case Study: Interrupt-less Servo Motor Controls for Pneumatic Pump in Safety Critical Devices Sangsoo Park Department of Computer Science and
, pp. 141-148 http://dx.doi.org/10.14257/ijseia.2016.10.3.13 Case Study: Interrupt-less Servo Motor Controls for Pneumatic Pump in Safety Critical Devices Sangsoo Park Department of Computer Science and
Numerical Static Analysis of Interrupt-Driven Programs via Sequentialization
 Numerical Static Analysis of Interrupt-Driven Programs via Sequentialization Xueguang Wu Liqian Chen Antoine Miné Wei Dong Ji Wang {xueguangwu, lqchen}@nudt.edu.cn Mine@di.ens.fr {wdong, wj}@nudt.edu.cn
Numerical Static Analysis of Interrupt-Driven Programs via Sequentialization Xueguang Wu Liqian Chen Antoine Miné Wei Dong Ji Wang {xueguangwu, lqchen}@nudt.edu.cn Mine@di.ens.fr {wdong, wj}@nudt.edu.cn
Programming Embedded Systems
 Programming Embedded Systems Lecture 5 Interrupts, modes of multi-tasking Wednesday Feb 1, 2012 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/31 Lecture outline Interrupts Internal, external,
Programming Embedded Systems Lecture 5 Interrupts, modes of multi-tasking Wednesday Feb 1, 2012 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/31 Lecture outline Interrupts Internal, external,
Real-Time Dynamic Voltage Hopping on MPSoCs
 Real-Time Dynamic Voltage Hopping on MPSoCs Tohru Ishihara System LSI Research Center, Kyushu University 2009/08/05 The 9 th International Forum on MPSoC and Multicore 1 Background Low Power / Low Energy
Real-Time Dynamic Voltage Hopping on MPSoCs Tohru Ishihara System LSI Research Center, Kyushu University 2009/08/05 The 9 th International Forum on MPSoC and Multicore 1 Background Low Power / Low Energy
Processes (Tasks) and operating systems. Why multiple processes? Example: engine control
 and operating systems. Why multiple processes? Example: engine control") Processes (Tasks) and operating systems Motivation for processes. The process abstraction. Context switching. Multitasking. Processes and UML. Operating systems Why multiple processes? Processes help us
Processes (Tasks) and operating systems Motivation for processes. The process abstraction. Context switching. Multitasking. Processes and UML. Operating systems Why multiple processes? Processes help us
MC-SDN: Supporting Mixed-Criticality Scheduling on Switched-Ethernet Using Software-Defined Networking
 MC-SDN: Supporting Mixed-Criticality Scheduling on Switched-Ethernet Using Software-Defined Networking Kilho Lee, Taejune Park, Minsu Kim, Hoon Sung Chwa, Jinkyu Lee* Seungwon Shin, and Insik Shin * 1
MC-SDN: Supporting Mixed-Criticality Scheduling on Switched-Ethernet Using Software-Defined Networking Kilho Lee, Taejune Park, Minsu Kim, Hoon Sung Chwa, Jinkyu Lee* Seungwon Shin, and Insik Shin * 1
The Last Mile An Empirical Study of Timing Channels on sel4
 The Last Mile An Empirical Study of Timing on David Cock Qian Ge Toby Murray Gernot Heiser 4 November 2014 NICTA Funding and Supporting Members and Partners Outline The Last Mile Copyright NICTA 2014 David
The Last Mile An Empirical Study of Timing on David Cock Qian Ge Toby Murray Gernot Heiser 4 November 2014 NICTA Funding and Supporting Members and Partners Outline The Last Mile Copyright NICTA 2014 David
Real-Time Operating Systems Design and Implementation. LS 12, TU Dortmund
 Real-Time Operating Systems Design and Implementation (slides are based on Prof. Dr. Jian-Jia Chen) Anas Toma, Jian-Jia Chen LS 12, TU Dortmund October 19, 2017 Anas Toma, Jian-Jia Chen (LS 12, TU Dortmund)
Real-Time Operating Systems Design and Implementation (slides are based on Prof. Dr. Jian-Jia Chen) Anas Toma, Jian-Jia Chen LS 12, TU Dortmund October 19, 2017 Anas Toma, Jian-Jia Chen (LS 12, TU Dortmund)
Copyright Notice. COMP9242 Advanced Operating Systems S2/2014 Week 9: Real-Time Systems. Real-Time System: Definition
 Copyright Notice These slides are distributed under the Creative Commons Attribution.0 License COMP94 Advanced Operating Systems S/014 Week 9: Real- Systems @GernotHeiser You are free: to share to copy,
Copyright Notice These slides are distributed under the Creative Commons Attribution.0 License COMP94 Advanced Operating Systems S/014 Week 9: Real- Systems @GernotHeiser You are free: to share to copy,