Interrupt response times on Arduino and Raspberry Pi. Tomaž Šolc
|
|
|
- Eileen Clarke
- 6 years ago
- Views:
Transcription


1 Interrupt response times on Arduino and Raspberry Pi Tomaž Šolc
2 Introduction Full-featured Linux-based systems are replacing microcontrollers in some embedded applications for low volumes, difference in BOM price is insignificant very little difference in physical size cheaper software development (proprietaty toolchains, asm vs. gcc, Python, Javascript,...) simpler debugging (JTAG vs. shell access, gdb) 65x30 mm $ x53 mm $25.00
3 A significantly different approach to real-time tasks general-purpose OS pre-emptive kernel, priority scheduling application-profile CPU core SMP, cache, pipelining, parallelism, MMU... 1 GHz clock, 1 GB RAM, 10 GB storage gross overprovisioning No OS or simple RT-OS hw. interrupt priority, low system overhead microcontroller-profile CPU core well-defined instruction lengths, access times MHz clock, 10 kb RAM, 100 kb storage predictability
4 Motivation for experiment What kind of interrupt response times can be expected from these systems out-of-the-box? Test most straightforward implementations Examples from manuals, first results on web search,... First implementation typically also the last (cheaper to go with higher-performance hardware than study and optimize prototype, lack of time, expertise,...) Two platforms commonly used as starting points e.g. hardware startups making IoT devices, SMEs (not specialized industries with large existing teams)

5 Experiment setup Task: on PIN rising edge raise POUT signal generator GW Instek AFG-2005 Device under test oscilloscope Tektronix TDS 2002B PC signal generator outputs a square wave signal with period >> t t oscilloscope measures time between rising edges on PIN and POUT lines PC stores results for later analysis
 Raspberry Pi Zero Broadcom BCM2835, ARM11 architecture, 1 GHz clock Raspbian Jessie OS (2016-03-18 image, Linux 4.")
6 Hardware Arduino Uno Atmel ATmega328p, AVR architecture, 16 MHz clock Arduino IDE (C++) Raspberry Pi Zero Broadcom BCM2835, ARM11 architecture, 1 GHz clock Raspbian Jessie OS ( image, Linux ) Python 2.7.9, RPi.GPIO 0.6.2
7 Software implementations Arduino Uno interrupt service routine on GPIO interrupt using attachinterrupt() standard library call. busy polling loop using digitalread() std. library call. Raspberry Pi Zero native, kernel space - Linux.ko module using»gpio consumer«interface. native, user space - Compiled C program using sysfs interface for GPIO. interpreted Python script using RPi.GPIO library.
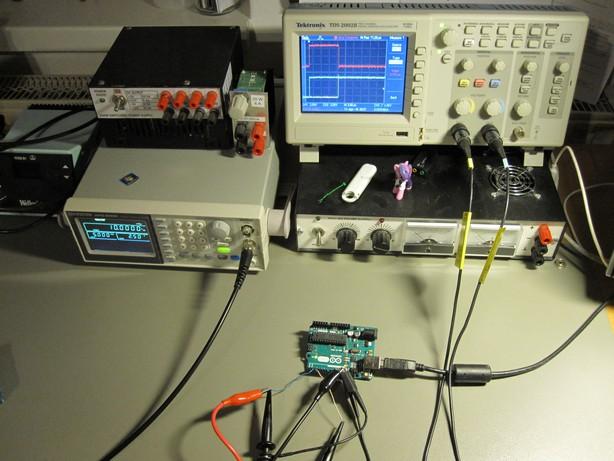
8 Experiment setup
9 Results Arduino, IRQ t min = μs t avg = μs t max = μs Arduino, polling t min = μs t avg = μs t max = μs R-Pi, native, kernel space t min = μs t avg = μs t max = μs R-Pi, native, user space t min = μs t avg = μs t max = μs R-Pi, Python t min = μs t avg = μs t max = μs
10 Results (histogram μs)
11 Results (histogram 0-50 μs)
12 Discussion of results Arduino response times unexpectedly inconsistent Measured >5 μs spread, should be 0,25 μs given CPU clock, instruction lengths R-Pi kernel mode code on average close to Arduino R-Pi has >60x faster CPU clock Less consistent (kernel has many other ISRs to serve) Interpreted Python implementation faster than native userspace code? Tested on an otherwise idle system on R-Pi.
13 Cause of Arduino inconsistency Standard library keeps timer0 enabled. Timer overflow interrupt competes with GPIO interrupt. If timer0 is disabled, measurements fit theory. t min = μs t avg = μs t max = μs Δt = μs
14 Why is Python faster than C? Python RPi.GPIO library mmaps GPIO registers to its own process address space removes need for syscalls when changing POUT state. syscall still needed when waiting for PIN edge interrupt vectors not directly accessible from userspace. syscalls are slow (context switch into kernelspace) Initial native userspace implementation used sysfs GPIO lines exposed as special files in /sys filesystem. 3 POSIX syscalls per POUT state change: open(), write(), close()

15 Why is Python faster than C? A native userspace implementation using mmap approach is faster than Python.

16 Effect of CPU load on R-Pi With default setup, R-Pi has lower response times when CPU is loaded compared to idle! Power saving feature ondemand governor lowers CPU clock from 1 GHz to 700 MHz when CPU is idle. Changing governor to performance produces expected results
17 Conclusions Complex systems can be counterintuitive simpler is not always faster profiling and measurements are important R-Pi can be»good enough«for some real-time tasks average times comparable to microcontrollers when using kernel driver but upper bound is not predictable expectations for reliability of consumer devices are decreasing - often features are more important.»it's good enough if it works 90% of the time«
18 Questions? Tomaž Šolc source code and raw data at
Electronics Single Board Computers
 Electronics Single Board Computers Wilfrid Laurier University November 23, 2016 Single Board Computers Single Board Computers As electronic devices get smaller and more sophisticated, they often contain
Electronics Single Board Computers Wilfrid Laurier University November 23, 2016 Single Board Computers Single Board Computers As electronic devices get smaller and more sophisticated, they often contain
I/O Systems (3): Clocks and Timers. CSE 2431: Introduction to Operating Systems
: Clocks and Timers. CSE 2431: Introduction to Operating Systems") I/O Systems (3): Clocks and Timers CSE 2431: Introduction to Operating Systems 1 Outline Clock Hardware Clock Software Soft Timers 2 Two Types of Clocks Simple clock: tied to the 110- or 220-volt power
I/O Systems (3): Clocks and Timers CSE 2431: Introduction to Operating Systems 1 Outline Clock Hardware Clock Software Soft Timers 2 Two Types of Clocks Simple clock: tied to the 110- or 220-volt power
RPi General Purpose IO (GPIO) Pins
 Pins") GPIO RPi Setup for Today Because the cobbler connector has a notch, you can only put the cable in the right way But, it is possible to put the cable in upside down on the Raspberry Pi The colored wire
GPIO RPi Setup for Today Because the cobbler connector has a notch, you can only put the cable in the right way But, it is possible to put the cable in upside down on the Raspberry Pi The colored wire
Advanced Embedded Systems
 Advanced Embedded Systems Practical & Professional Training on Advanced Embedded System Course Objectives : 1. To provide professional and industrial standard training which will help the students to get
Advanced Embedded Systems Practical & Professional Training on Advanced Embedded System Course Objectives : 1. To provide professional and industrial standard training which will help the students to get
Kevin Meehan Stephen Moskal Computer Architecture Winter 2012 Dr. Shaaban
 Kevin Meehan Stephen Moskal Computer Architecture Winter 2012 Dr. Shaaban Contents Raspberry Pi Foundation Raspberry Pi overview & specs ARM11 overview ARM11 cache, pipeline, branch prediction ARM11 vs.
Kevin Meehan Stephen Moskal Computer Architecture Winter 2012 Dr. Shaaban Contents Raspberry Pi Foundation Raspberry Pi overview & specs ARM11 overview ARM11 cache, pipeline, branch prediction ARM11 vs.
ECE 353 Lab 4. General MIDI Explorer. Professor Daniel Holcomb Fall 2015
 ECE 353 Lab 4 General MIDI Explorer Professor Daniel Holcomb Fall 2015 Where are we in Course Lab 0 Cache Simulator in C C programming, data structures Cache architecture and analysis Lab 1 Heat Flow Modeling
ECE 353 Lab 4 General MIDI Explorer Professor Daniel Holcomb Fall 2015 Where are we in Course Lab 0 Cache Simulator in C C programming, data structures Cache architecture and analysis Lab 1 Heat Flow Modeling
F28HS Hardware-Software Interface: Systems Programming
 F28HS Hardware-Software Interface: Systems Programming Hans-Wolfgang Loidl School of Mathematical and Computer Sciences, Heriot-Watt University, Edinburgh Semester 2 2017/18 0 No proprietary software has
F28HS Hardware-Software Interface: Systems Programming Hans-Wolfgang Loidl School of Mathematical and Computer Sciences, Heriot-Watt University, Edinburgh Semester 2 2017/18 0 No proprietary software has
Development of Real-Time Systems with Embedded Linux. Brandon Shibley Senior Solutions Architect Toradex Inc.
 Development of Real-Time Systems with Embedded Linux Brandon Shibley Senior Solutions Architect Toradex Inc. Overview Toradex ARM-based System-on-Modules Pin-Compatible SoM Families In-house HW and SW
Development of Real-Time Systems with Embedded Linux Brandon Shibley Senior Solutions Architect Toradex Inc. Overview Toradex ARM-based System-on-Modules Pin-Compatible SoM Families In-house HW and SW
Lesson 7 Programming Embedded Galileo, Raspberry Pi, BeagleBone and mbed Platforms
 Lesson 7 Programming Embedded Galileo, Raspberry Pi, BeagleBone and mbed Platforms 1 Development Of Programs For Prototype Development Platforms Done using an IDE The cycles of edit-test-debug used When
Lesson 7 Programming Embedded Galileo, Raspberry Pi, BeagleBone and mbed Platforms 1 Development Of Programs For Prototype Development Platforms Done using an IDE The cycles of edit-test-debug used When
Measuring the impacts of the Preempt-RT patch
 Measuring the impacts of the Preempt-RT patch maxime.chevallier@smile.fr October 25, 2017 RT Linux projects Simulation platform : bi-xeon, lots ot RAM 200µs wakeup latency, networking Test bench : Intel
Measuring the impacts of the Preempt-RT patch maxime.chevallier@smile.fr October 25, 2017 RT Linux projects Simulation platform : bi-xeon, lots ot RAM 200µs wakeup latency, networking Test bench : Intel
ECE 471 Embedded Systems Lecture 12
 ECE 471 Embedded Systems Lecture 12 Vince Weaver http://web.eece.maine.edu/~vweaver vincent.weaver@maine.edu 1 October 2018 HW#4 was posted. Announcements Permissions! Unless your user is configured to
ECE 471 Embedded Systems Lecture 12 Vince Weaver http://web.eece.maine.edu/~vweaver vincent.weaver@maine.edu 1 October 2018 HW#4 was posted. Announcements Permissions! Unless your user is configured to
Building Real-Time Embedded Applications on QduinoMC
 Building Real-Time Embedded Applications on QduinoMC A Web-connected 3D Printer Case Study Zhuoqun (Tom) Cheng, Richard West and Ying Ye 2 3D Printing HOW-TO CAD Model Melt the filament Extruder Move in
Building Real-Time Embedded Applications on QduinoMC A Web-connected 3D Printer Case Study Zhuoqun (Tom) Cheng, Richard West and Ying Ye 2 3D Printing HOW-TO CAD Model Melt the filament Extruder Move in
w w w. b a s e t r a i n i n g i n s t i t u t e. c o
 Disclaimer: Some of the images and most of the data in this presentation are collected from various sources in the internet. If you notice any copyright issues or mistakes, please let me know by mailing
Disclaimer: Some of the images and most of the data in this presentation are collected from various sources in the internet. If you notice any copyright issues or mistakes, please let me know by mailing
ECE 471 Embedded Systems Lecture 12
 ECE 471 Embedded Systems Lecture 12 Vince Weaver http://web.eece.maine.edu/~vweaver vincent.weaver@maine.edu 25 September 2017 HW#4 was posted. Announcements 1 Homework 3 Be sure to put your name in the
ECE 471 Embedded Systems Lecture 12 Vince Weaver http://web.eece.maine.edu/~vweaver vincent.weaver@maine.edu 25 September 2017 HW#4 was posted. Announcements 1 Homework 3 Be sure to put your name in the
extended external Benchmarking extension (XXBX)
") extended external Benchmarking extension () John Pham and Jens-Peter Kaps Cryptographic Engineering Research Group (CERG) http://cryptography.gmu.edu Department of ECE, Volgenau School of Engineering,
extended external Benchmarking extension () John Pham and Jens-Peter Kaps Cryptographic Engineering Research Group (CERG) http://cryptography.gmu.edu Department of ECE, Volgenau School of Engineering,
Low-Cost Microcontrollers
 Low-Cost Microcontrollers Examples and Applications for Embedded Systems João Carlos Martins joao.martins@ipbeja.pt Engineering Dept 1st Workshop on Applied Signal Processing IPBeja 15th May 2014 Outline
Low-Cost Microcontrollers Examples and Applications for Embedded Systems João Carlos Martins joao.martins@ipbeja.pt Engineering Dept 1st Workshop on Applied Signal Processing IPBeja 15th May 2014 Outline
64 bit Bare Metal Programming on RPI-3. Tristan Gingold
 64 bit Bare Metal Programming on RPI-3 Tristan Gingold gingold@adacore.com What is Bare Metal? Images: Wikipedia No box What is Bare Metal? No Operating System Your application is the OS Why Bare Board?
64 bit Bare Metal Programming on RPI-3 Tristan Gingold gingold@adacore.com What is Bare Metal? Images: Wikipedia No box What is Bare Metal? No Operating System Your application is the OS Why Bare Board?
EE414 Embedded Systems Lab 4. Interrupt. 1. Purpose. 2. Problem Statement
 EE414 Embedded Systems Lab 4. Interrupt Due Demo 4 6 PM, Nov 16, Thu. Report 6 PM, Nov 21, Tue. 1. Purpose Understand how to program the interrupt and timer via signal handler on the AM3359 processor in
EE414 Embedded Systems Lab 4. Interrupt Due Demo 4 6 PM, Nov 16, Thu. Report 6 PM, Nov 21, Tue. 1. Purpose Understand how to program the interrupt and timer via signal handler on the AM3359 processor in
Embedded Linux With Raspberry Pi IOT
 Embedded Linux With Raspberry Pi IOT Module 1 : Raspberry Pi Set up & Configurations Program Raspberry Pi : a credit-card sized computer Python programming for Raspberry Pi Interacting and configuring
Embedded Linux With Raspberry Pi IOT Module 1 : Raspberry Pi Set up & Configurations Program Raspberry Pi : a credit-card sized computer Python programming for Raspberry Pi Interacting and configuring
Cooking with Team 279
 Cooking with Team 279 Intro to the Raspberry Pi FIRST Team 279 Tech Fusion http://team279.com - https://twitter.com/team_279 Author: Michael Lehman What is a System on a Chip? From Wikipedia: A system
Cooking with Team 279 Intro to the Raspberry Pi FIRST Team 279 Tech Fusion http://team279.com - https://twitter.com/team_279 Author: Michael Lehman What is a System on a Chip? From Wikipedia: A system
ECE 471 Embedded Systems Lecture 2
 ECE 471 Embedded Systems Lecture 2 Vince Weaver http://web.eece.maine.edu/~vweaver vincent.weaver@maine.edu 7 September 2018 Announcements Reminder: The class notes are posted to the website. HW#1 will
ECE 471 Embedded Systems Lecture 2 Vince Weaver http://web.eece.maine.edu/~vweaver vincent.weaver@maine.edu 7 September 2018 Announcements Reminder: The class notes are posted to the website. HW#1 will
Department of Computer Science, Institute for System Architecture, Operating Systems Group. Real-Time Systems '08 / '09. Hardware.
 Department of Computer Science, Institute for System Architecture, Operating Systems Group Real-Time Systems '08 / '09 Hardware Marcus Völp Outlook Hardware is Source of Unpredictability Caches Pipeline
Department of Computer Science, Institute for System Architecture, Operating Systems Group Real-Time Systems '08 / '09 Hardware Marcus Völp Outlook Hardware is Source of Unpredictability Caches Pipeline
Raspberry Pi Introduction
 ECE 1160/2160 Embedded Systems Design Raspberry Pi Introduction Wei Gao ECE 1160/2160 Embedded Systems Design 1 Raspberry Pi Classic embedded computer Single board computer Size of a credit card ECE 1160/2160
ECE 1160/2160 Embedded Systems Design Raspberry Pi Introduction Wei Gao ECE 1160/2160 Embedded Systems Design 1 Raspberry Pi Classic embedded computer Single board computer Size of a credit card ECE 1160/2160
Embedded Technosolutions
 We Are India s one of the Leading Trainings & Jobs Providing Organization Government of India Registered & ISO Certified Organization Embedded Technosolutions is a Professional Training Institute & a
We Are India s one of the Leading Trainings & Jobs Providing Organization Government of India Registered & ISO Certified Organization Embedded Technosolutions is a Professional Training Institute & a
ECE 471 Embedded Systems Lecture 12
 ECE 471 Embedded Systems Lecture 12 Vince Weaver http://www.eece.maine.edu/~vweaver vincent.weaver@maine.edu 8 October 2015 Announcements Homework grades have been sent out, let me know if you did not
ECE 471 Embedded Systems Lecture 12 Vince Weaver http://www.eece.maine.edu/~vweaver vincent.weaver@maine.edu 8 October 2015 Announcements Homework grades have been sent out, let me know if you did not
EE4390 Microprocessors
 EE4390 Microprocessors Lessons 23, 24 - Exceptions - Resets and Interrupts Revised: Aug 1, 2003 1 - Exceptions - Resets and Interrupts Polling vs. Interrupts Exceptions: Resets and Interrupts 68HC12 Exceptions
EE4390 Microprocessors Lessons 23, 24 - Exceptions - Resets and Interrupts Revised: Aug 1, 2003 1 - Exceptions - Resets and Interrupts Polling vs. Interrupts Exceptions: Resets and Interrupts 68HC12 Exceptions
Dongjun Shin Samsung Electronics
 2014.10.31. Dongjun Shin Samsung Electronics Contents 2 Background Understanding CPU behavior Experiments Improvement idea Revisiting Linux I/O stack Conclusion Background Definition 3 CPU bound A computer
2014.10.31. Dongjun Shin Samsung Electronics Contents 2 Background Understanding CPU behavior Experiments Improvement idea Revisiting Linux I/O stack Conclusion Background Definition 3 CPU bound A computer
HOW TO INTEGRATE NFC FRONTENDS IN LINUX
 HOW TO INTEGRATE NFC FRONTENDS IN LINUX JORDI JOFRE NFC READERS NFC EVERYWHERE 14/09/2017 WEBINAR SERIES: NFC SOFTWARE INTEGRATION PUBLIC Agenda NFC software integration webinar series Session I, 14th
HOW TO INTEGRATE NFC FRONTENDS IN LINUX JORDI JOFRE NFC READERS NFC EVERYWHERE 14/09/2017 WEBINAR SERIES: NFC SOFTWARE INTEGRATION PUBLIC Agenda NFC software integration webinar series Session I, 14th
How Linux RT_PREEMPT Works
 How Linux RT_PREEMPT Works A common observation about real time systems is that the cost of the increased determinism of real time is decreased throughput and increased average latency. This presentation
How Linux RT_PREEMPT Works A common observation about real time systems is that the cost of the increased determinism of real time is decreased throughput and increased average latency. This presentation
System Energy Efficiency Lab seelab.ucsd.edu
 Motivation Embedded systems operate in, interact with, and react to an analog, real-time world Interfacing with this world is not easy or monolithic Sensors: provide measurements of the outside world Actuators:
Motivation Embedded systems operate in, interact with, and react to an analog, real-time world Interfacing with this world is not easy or monolithic Sensors: provide measurements of the outside world Actuators:
ECE 598 Advanced Operating Systems Lecture 4
 ECE 598 Advanced Operating Systems Lecture 4 Vince Weaver http://www.eece.maine.edu/~vweaver vincent.weaver@maine.edu 28 January 2016 Announcements HW#1 was due HW#2 was posted, will be tricky Let me know
ECE 598 Advanced Operating Systems Lecture 4 Vince Weaver http://www.eece.maine.edu/~vweaver vincent.weaver@maine.edu 28 January 2016 Announcements HW#1 was due HW#2 was posted, will be tricky Let me know
A Comparison of Scheduling Latency in Linux, PREEMPT_RT, and LITMUS RT. Felipe Cerqueira and Björn Brandenburg
 A Comparison of Scheduling Latency in Linux, PREEMPT_RT, and LITMUS RT Felipe Cerqueira and Björn Brandenburg July 9th, 2013 1 Linux as a Real-Time OS 2 Linux as a Real-Time OS Optimizing system responsiveness
A Comparison of Scheduling Latency in Linux, PREEMPT_RT, and LITMUS RT Felipe Cerqueira and Björn Brandenburg July 9th, 2013 1 Linux as a Real-Time OS 2 Linux as a Real-Time OS Optimizing system responsiveness
[537] I/O Devices/Disks. Tyler Harter
![[537] I/O Devices/Disks. Tyler Harter](/thumbs/78/78050711.jpg "[537] I/O Devices/Disks. Tyler Harter") [537] I/O Devices/Disks Tyler Harter I/O Devices Motivation What good is a computer without any I/O devices? - keyboard, display, disks! We want: - H/W that will let us plug in different devices - OS that
[537] I/O Devices/Disks Tyler Harter I/O Devices Motivation What good is a computer without any I/O devices? - keyboard, display, disks! We want: - H/W that will let us plug in different devices - OS that
ARDUINO YÚN MINI Code: A000108
 ARDUINO YÚN MINI Code: A000108 The Arduino Yún Mini is a compact version of the Arduino YUN OVERVIEW: Arduino Yún Mini is a breadboard PCB developed with ATmega 32u4 MCU and QCA MIPS 24K SoC CPU operating
ARDUINO YÚN MINI Code: A000108 The Arduino Yún Mini is a compact version of the Arduino YUN OVERVIEW: Arduino Yún Mini is a breadboard PCB developed with ATmega 32u4 MCU and QCA MIPS 24K SoC CPU operating
Evaluation of Real-time Performance in Embedded Linux. Hiraku Toyooka, Hitachi. LinuxCon Europe Hitachi, Ltd All rights reserved.
 Evaluation of Real-time Performance in Embedded Linux LinuxCon Europe 2014 Hiraku Toyooka, Hitachi 1 whoami Hiraku Toyooka Software engineer at Hitachi " Working on operating systems Linux (mainly) for
Evaluation of Real-time Performance in Embedded Linux LinuxCon Europe 2014 Hiraku Toyooka, Hitachi 1 whoami Hiraku Toyooka Software engineer at Hitachi " Working on operating systems Linux (mainly) for
Demand Code Paging for NAND Flash in MMU-less Embedded Systems. Jose Baiocchi and Bruce Childers
 Demand Code Paging for NAND Flash in MMU-less Embedded Systems Jose Baiocchi and Pittsburgh PA USA childers@cs.pitt.edu Memory Shadowing Range of embedded systems commonly have both main memory and storage
Demand Code Paging for NAND Flash in MMU-less Embedded Systems Jose Baiocchi and Pittsburgh PA USA childers@cs.pitt.edu Memory Shadowing Range of embedded systems commonly have both main memory and storage
GUI Based Industrial Automation using Python under Linux
 GUI Based Industrial Automation using Python under Linux G.VinothKumar, Assistant Professor, Dept. of ECE, SRM University, Ramapuram campus, Chennai E.Poovannan, Assistant Professor, Dept. of ECE, SRM
GUI Based Industrial Automation using Python under Linux G.VinothKumar, Assistant Professor, Dept. of ECE, SRM University, Ramapuram campus, Chennai E.Poovannan, Assistant Professor, Dept. of ECE, SRM
IoT.js. Next generation web for connected things. Samsung Electronics Software Center Piotr Marcinkiewicz 2017
 IoT.js Next generation web for connected things Samsung Electronics Software Center Piotr Marcinkiewicz 2017 Agenda Introduction Architecture Node.js vs. IoT.js APIs You are invited Community Q&A 01 02
IoT.js Next generation web for connected things Samsung Electronics Software Center Piotr Marcinkiewicz 2017 Agenda Introduction Architecture Node.js vs. IoT.js APIs You are invited Community Q&A 01 02
Akaros. Barret Rhoden, Kevin Klues, Andrew Waterman, Ron Minnich, David Zhu, Eric Brewer UC Berkeley and Google
 Akaros Barret Rhoden, Kevin Klues, Andrew Waterman, Ron Minnich, David Zhu, Eric Brewer UC Berkeley and Google High Level View Research OS, made for single nodes Large-scale SMP / many-core architectures
Akaros Barret Rhoden, Kevin Klues, Andrew Waterman, Ron Minnich, David Zhu, Eric Brewer UC Berkeley and Google High Level View Research OS, made for single nodes Large-scale SMP / many-core architectures
ADVANCED trouble-shooting of real-time systems. Bernd Hufmann, Ericsson
 ADVANCED trouble-shooting of real-time systems Bernd Hufmann, Ericsson AGENDA 1 Introduction 2 3 Timing Analysis 4 References 5 Q&A Trace Compass Overview ADVANCED trouble-shooting of critical real-time
ADVANCED trouble-shooting of real-time systems Bernd Hufmann, Ericsson AGENDA 1 Introduction 2 3 Timing Analysis 4 References 5 Q&A Trace Compass Overview ADVANCED trouble-shooting of critical real-time
AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel. Alexander Züpke, Marc Bommert, Daniel Lohmann
 AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel Alexander Züpke, Marc Bommert, Daniel Lohmann alexander.zuepke@hs-rm.de, marc.bommert@hs-rm.de, lohmann@cs.fau.de Motivation Automotive and Avionic industry
AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel Alexander Züpke, Marc Bommert, Daniel Lohmann alexander.zuepke@hs-rm.de, marc.bommert@hs-rm.de, lohmann@cs.fau.de Motivation Automotive and Avionic industry
Kernel Internals. Course Duration: 5 days. Pre-Requisites : Course Objective: Course Outline
 Course Duration: 5 days Pre-Requisites : Good C programming skills. Required knowledge Linux as a User Course Objective: To get Kernel and User Space of Linux and related programming Linux Advance Programming
Course Duration: 5 days Pre-Requisites : Good C programming skills. Required knowledge Linux as a User Course Objective: To get Kernel and User Space of Linux and related programming Linux Advance Programming
Tracing embedded heterogeneous systems
 Tracing embedded heterogeneous systems P R O G R E S S R E P O R T M E E T I N G, D E C E M B E R 2015 T H O M A S B E R T A U L D D I R E C T E D B Y M I C H E L D A G E N A I S December 10th 2015 TRACING
Tracing embedded heterogeneous systems P R O G R E S S R E P O R T M E E T I N G, D E C E M B E R 2015 T H O M A S B E R T A U L D D I R E C T E D B Y M I C H E L D A G E N A I S December 10th 2015 TRACING
RetroBSD - a minimalistic Unix system. Igor Mokoš bsd_day Bratislava
 RetroBSD - a minimalistic Unix system Igor Mokoš pito@volna.cz bsd_day Bratislava 5.11.2011 RetroBSD RetroBSD is a port of 2.11BSD Unix intended for small embedded systems Currently Microchip PIC32MX 32bit
RetroBSD - a minimalistic Unix system Igor Mokoš pito@volna.cz bsd_day Bratislava 5.11.2011 RetroBSD RetroBSD is a port of 2.11BSD Unix intended for small embedded systems Currently Microchip PIC32MX 32bit
Functions (API) Setup Functions
 Setup Functions") Functions (API) Some of the functions in the WiringPi library are designed to mimic those in the Arduino Wiring system. There are relatively easy to use and should present no problems for anyone used to
Functions (API) Some of the functions in the WiringPi library are designed to mimic those in the Arduino Wiring system. There are relatively easy to use and should present no problems for anyone used to
Computer Science Window-Constrained Process Scheduling for Linux Systems
 Window-Constrained Process Scheduling for Linux Systems Richard West Ivan Ganev Karsten Schwan Talk Outline Goals of this research DWCS background DWCS implementation details Design of the experiments
Window-Constrained Process Scheduling for Linux Systems Richard West Ivan Ganev Karsten Schwan Talk Outline Goals of this research DWCS background DWCS implementation details Design of the experiments
Processor and Peripheral IP Cores for Microcontrollers in Embedded Space Applications
 Processor and Peripheral IP Cores for Microcontrollers in Embedded Space Applications Presentation at ADCSS 2010 MESA November 4 th, 2010 www.aeroflex.com/gaisler Presentation outline Microcontroller requirements
Processor and Peripheral IP Cores for Microcontrollers in Embedded Space Applications Presentation at ADCSS 2010 MESA November 4 th, 2010 www.aeroflex.com/gaisler Presentation outline Microcontroller requirements
Introduction to the Raspberry Pi AND LINUX FOR DUMMIES
 Introduction to the Raspberry Pi AND LINUX FOR DUMMIES 700Mhz ARM v6 Broadcomm CPU+GPU 512 MB RAM (256MB on Model A) Boots off SD card for filesystem USB, Audio out, LAN (Model B only) HDMI + Composite
Introduction to the Raspberry Pi AND LINUX FOR DUMMIES 700Mhz ARM v6 Broadcomm CPU+GPU 512 MB RAM (256MB on Model A) Boots off SD card for filesystem USB, Audio out, LAN (Model B only) HDMI + Composite
Architecture and OS. To do. q Architecture impact on OS q OS impact on architecture q Next time: OS components and structure
 Architecture and OS To do q Architecture impact on OS q OS impact on architecture q Next time: OS components and structure Computer architecture and OS OS is intimately tied to the hardware it runs on
Architecture and OS To do q Architecture impact on OS q OS impact on architecture q Next time: OS components and structure Computer architecture and OS OS is intimately tied to the hardware it runs on
FMCAD 2011 (Austin, Texas) Jonathan Kotker, Dorsa Sadigh, Sanjit Seshia University of California, Berkeley
 Jonathan Kotker, Dorsa Sadigh, Sanjit Seshia University of California, Berkeley") FMCAD 2011 (Austin, Texas) Jonathan Kotker, Dorsa Sadigh, Sanjit Seshia University of California, Berkeley 1 Cyber-Physical = Computation + Physical Processes Quantitative analysis of programs is crucial:
FMCAD 2011 (Austin, Texas) Jonathan Kotker, Dorsa Sadigh, Sanjit Seshia University of California, Berkeley 1 Cyber-Physical = Computation + Physical Processes Quantitative analysis of programs is crucial:
Real Time Application Interface focused on servo motor control
 AUTOMATYKA 2006 Tom 10 Zeszyt 2 Marcin Pi¹tek* Real Time Application Interface focused on servo motor control 1. Introduction The GNU/Linux operating system consists of the Linux kernel and GNU software.
AUTOMATYKA 2006 Tom 10 Zeszyt 2 Marcin Pi¹tek* Real Time Application Interface focused on servo motor control 1. Introduction The GNU/Linux operating system consists of the Linux kernel and GNU software.
POWER-AWARE SOFTWARE ON ARM. Paul Fox
 POWER-AWARE SOFTWARE ON ARM Paul Fox OUTLINE MOTIVATION LINUX POWER MANAGEMENT INTERFACES A UNIFIED POWER MANAGEMENT SYSTEM EXPERIMENTAL RESULTS AND FUTURE WORK 2 MOTIVATION MOTIVATION» ARM SoCs designed
POWER-AWARE SOFTWARE ON ARM Paul Fox OUTLINE MOTIVATION LINUX POWER MANAGEMENT INTERFACES A UNIFIED POWER MANAGEMENT SYSTEM EXPERIMENTAL RESULTS AND FUTURE WORK 2 MOTIVATION MOTIVATION» ARM SoCs designed
Performance evaluation of Linux CAN-related system calls
 Performance evaluation of Linux CAN-related system calls Michal Sojka, Pavel Píša, Zdeněk Hanzálek Czech Technical University in Prague, Faculty of Electrical Engineering Email: {sojkam1,pisa,hanzalek}@fel.cvut.cz
Performance evaluation of Linux CAN-related system calls Michal Sojka, Pavel Píša, Zdeněk Hanzálek Czech Technical University in Prague, Faculty of Electrical Engineering Email: {sojkam1,pisa,hanzalek}@fel.cvut.cz
Amortised Optimisation as a Means to Achieve Genetic Improvement
 Amortised Optimisation as a Means to Achieve Genetic Improvement Hyeongjun Cho, Sungwon Cho, Seongmin Lee, Jeongju Sohn, and Shin Yoo Date 2017.01.30, The 50th CREST Open Workshop Offline Improvement Expensive
Amortised Optimisation as a Means to Achieve Genetic Improvement Hyeongjun Cho, Sungwon Cho, Seongmin Lee, Jeongju Sohn, and Shin Yoo Date 2017.01.30, The 50th CREST Open Workshop Offline Improvement Expensive
POWER MANAGEMENT AND ENERGY EFFICIENCY
 POWER MANAGEMENT AND ENERGY EFFICIENCY * Adopted Power Management for Embedded Systems, Minsoo Ryu 2017 Operating Systems Design Euiseong Seo (euiseong@skku.edu) Need for Power Management Power consumption
POWER MANAGEMENT AND ENERGY EFFICIENCY * Adopted Power Management for Embedded Systems, Minsoo Ryu 2017 Operating Systems Design Euiseong Seo (euiseong@skku.edu) Need for Power Management Power consumption
Enabling Hybrid Parallel Runtimes Through Kernel and Virtualization Support. Kyle C. Hale and Peter Dinda
 Enabling Hybrid Parallel Runtimes Through Kernel and Virtualization Support Kyle C. Hale and Peter Dinda Hybrid Runtimes the runtime IS the kernel runtime not limited to abstractions exposed by syscall
Enabling Hybrid Parallel Runtimes Through Kernel and Virtualization Support Kyle C. Hale and Peter Dinda Hybrid Runtimes the runtime IS the kernel runtime not limited to abstractions exposed by syscall
A Global Operating System for HPC Clusters
 A Global Operating System Emiliano Betti 1 Marco Cesati 1 Roberto Gioiosa 2 Francesco Piermaria 1 1 System Programming Research Group, University of Rome Tor Vergata 2 BlueGene Software Division, IBM TJ
A Global Operating System Emiliano Betti 1 Marco Cesati 1 Roberto Gioiosa 2 Francesco Piermaria 1 1 System Programming Research Group, University of Rome Tor Vergata 2 BlueGene Software Division, IBM TJ
Measuring Interrupt Latency
 NXP Semiconductors Document Number: AN12078 Application Note Rev. 0, 10/2017 Measuring Interrupt Latency 1. Introduction The term interrupt latency refers to the delay between the start of an Interrupt
NXP Semiconductors Document Number: AN12078 Application Note Rev. 0, 10/2017 Measuring Interrupt Latency 1. Introduction The term interrupt latency refers to the delay between the start of an Interrupt
Here to take you beyond. ECEP Course syllabus. Emertxe Information Technologies ECEP course syllabus
 Here to take you beyond ECEP Course syllabus Module: 1/6 Module name: Linux Systems To get familiar with Linux Operating system Commands, tools and editors Enable you to write Shell scripts To understand
Here to take you beyond ECEP Course syllabus Module: 1/6 Module name: Linux Systems To get familiar with Linux Operating system Commands, tools and editors Enable you to write Shell scripts To understand
IoT Project Proposals
 IoT Project Proposals 1 Submit before 31 st March Best 5 proposals will be given Intel Galileo Gen 2 microcontroller boards each 2 Advisory Board will evaluate and select the best project proposals Dr.
IoT Project Proposals 1 Submit before 31 st March Best 5 proposals will be given Intel Galileo Gen 2 microcontroller boards each 2 Advisory Board will evaluate and select the best project proposals Dr.
Motivation. Threads. Multithreaded Server Architecture. Thread of execution. Chapter 4
 Motivation Threads Chapter 4 Most modern applications are multithreaded Threads run within application Multiple tasks with the application can be implemented by separate Update display Fetch data Spell
Motivation Threads Chapter 4 Most modern applications are multithreaded Threads run within application Multiple tasks with the application can be implemented by separate Update display Fetch data Spell
Lab Assignment Each team will independently implement the launch interceptor specification For this assignment, you re writing portable C code
 Lab Assignment Each team will independently implement the launch interceptor specification For this assignment, you re writing portable C code We ll worry about I/O later Lab Assignment You are allowed
Lab Assignment Each team will independently implement the launch interceptor specification For this assignment, you re writing portable C code We ll worry about I/O later Lab Assignment You are allowed
ARM Powered SoCs OpenEmbedded: a framework for toolcha. generation and rootfs management
 ARM Powered SoCs OpenEmbedded: a framework for toolchain generation and rootfs management jacopo @ Admstaff Reloaded 12-2010 An overview on commercial ARM-Powered SOCs Many low-cost ARM powered devices
ARM Powered SoCs OpenEmbedded: a framework for toolchain generation and rootfs management jacopo @ Admstaff Reloaded 12-2010 An overview on commercial ARM-Powered SOCs Many low-cost ARM powered devices
Nano RK And Zigduino. wnfa ta course hikaru4
 Nano RK And Zigduino wnfa ta course hikaru4 Today's outline Zigduino v.s. Firefly Atmel processor and the program chip I/O Interface on the board Atmega128rfa1, FTDI chip... GPIO, ADC, UART, SPI, I2C...
Nano RK And Zigduino wnfa ta course hikaru4 Today's outline Zigduino v.s. Firefly Atmel processor and the program chip I/O Interface on the board Atmega128rfa1, FTDI chip... GPIO, ADC, UART, SPI, I2C...
ARDUINO YÚN Code: A000008
 ARDUINO YÚN Code: A000008 Arduino YÚN is the perfect board to use when designing connected devices and, more in general, Internet of Things projects. It combines the power of Linux with the ease of use
ARDUINO YÚN Code: A000008 Arduino YÚN is the perfect board to use when designing connected devices and, more in general, Internet of Things projects. It combines the power of Linux with the ease of use
Usable Simulink Embedded Coder Target for Linux
 Usable Simulink Embedded Coder Target for Linux Michal Sojka, Pavel Píša Czech Technical University in Prague Faculty of Electrical Engineering Department of Control Engineering 16 th Real-Time Linux Workshop
Usable Simulink Embedded Coder Target for Linux Michal Sojka, Pavel Píša Czech Technical University in Prague Faculty of Electrical Engineering Department of Control Engineering 16 th Real-Time Linux Workshop
CSC227: Operating Systems Fall Chapter 1 INTERRUPTS. Dr. Soha S. Zaghloul
 CSC227: Operating Systems Fall 2016 Chapter 1 INTERRUPTS Dr. Soha S. Zaghloul LAYOUT 1.3 Devices Controlling Techniques 1.3.1 Polling 1.3.2 Interrupts H/W Interrupts Interrupt Controller Process State
CSC227: Operating Systems Fall 2016 Chapter 1 INTERRUPTS Dr. Soha S. Zaghloul LAYOUT 1.3 Devices Controlling Techniques 1.3.1 Polling 1.3.2 Interrupts H/W Interrupts Interrupt Controller Process State
Operating Systems Design 25. Power Management. Paul Krzyzanowski
 Operating Systems Design 25. Power Management Paul Krzyzanowski pxk@cs.rutgers.edu 1 Power Management Goal: Improve the battery life of mobile devices 2 CPU Voltage & Frequency Scaling Dynamic CPU Frequency
Operating Systems Design 25. Power Management Paul Krzyzanowski pxk@cs.rutgers.edu 1 Power Management Goal: Improve the battery life of mobile devices 2 CPU Voltage & Frequency Scaling Dynamic CPU Frequency
Hardware OS & OS- Application interface
 CS 4410 Operating Systems Hardware OS & OS- Application interface Summer 2013 Cornell University 1 Today How my device becomes useful for the user? HW-OS interface Device controller Device driver Interrupts
CS 4410 Operating Systems Hardware OS & OS- Application interface Summer 2013 Cornell University 1 Today How my device becomes useful for the user? HW-OS interface Device controller Device driver Interrupts
An Incubator Project in the Apache Software Foundation. 13 July 2016
 An Incubator Project in the Apache Software Foundation http://mynewt.apache.org/ 13 July 2016 Apache Mynewt Open Source OS for Constrained IoT MCU / Hardware independent ARM Cortex-M*, AVR, MIPS, more...
An Incubator Project in the Apache Software Foundation http://mynewt.apache.org/ 13 July 2016 Apache Mynewt Open Source OS for Constrained IoT MCU / Hardware independent ARM Cortex-M*, AVR, MIPS, more...
Lab 2 - RASPNet layer 1 und 2
 Embedded Software Lab Professur Betriebssysteme Lab 2 - RASPNet layer 1 und 2 Christine Jakobs, Martin Richter In this lab, you will implement the first two layers of the RASPNet protocol. They must be
Embedded Software Lab Professur Betriebssysteme Lab 2 - RASPNet layer 1 und 2 Christine Jakobs, Martin Richter In this lab, you will implement the first two layers of the RASPNet protocol. They must be
Embedded Technosolutions
 We Are India s one of the Leading Trainings & Jobs Providing Organization Embedded Technosolutions is a Professional & Corporate Training Institute & a Company which Working for Indian MNCs & Medium/Small
We Are India s one of the Leading Trainings & Jobs Providing Organization Embedded Technosolutions is a Professional & Corporate Training Institute & a Company which Working for Indian MNCs & Medium/Small
Lesson 2 Prototyping Embedded Software on Arduino on Arduino boards. Chapter-9 L02: "Internet of Things ", Raj Kamal, Publs.: McGraw-Hill Education
 Lesson 2 Prototyping Embedded Software on Arduino on Arduino boards 1 Prototyping Embedded Software Develop the codes, design and test the embedded devices for IoT and M2M using the IDEs and development
Lesson 2 Prototyping Embedded Software on Arduino on Arduino boards 1 Prototyping Embedded Software Develop the codes, design and test the embedded devices for IoT and M2M using the IDEs and development
ECEN 449 Microprocessor System Design. Hardware-Software Communication. Texas A&M University
 ECEN 449 Microprocessor System Design Hardware-Software Communication 1 Objectives of this Lecture Unit Learn basics of Hardware-Software communication Memory Mapped I/O Polling/Interrupts 2 Motivation
ECEN 449 Microprocessor System Design Hardware-Software Communication 1 Objectives of this Lecture Unit Learn basics of Hardware-Software communication Memory Mapped I/O Polling/Interrupts 2 Motivation
RaRa Academy: Raspberry Pi. Karl Heinz Kremer - K5KHK
 RaRa Academy: Raspberry Pi Karl Heinz Kremer - K5KHK Why Are We Here? I cannot convert you into a Raspberry Pi (or Linux) expert in two hours I cannot teach you everything there is to know about using
RaRa Academy: Raspberry Pi Karl Heinz Kremer - K5KHK Why Are We Here? I cannot convert you into a Raspberry Pi (or Linux) expert in two hours I cannot teach you everything there is to know about using
IoT Based Traffic Signalling System
 IoT Based Traffic Signalling System Ashok. P.V B.Tech Graduate, Department of Information Technology, SivaSankari.S Assistant Professor, Department of Information Technology, Vignesh Mani B.Tech Graduate,
IoT Based Traffic Signalling System Ashok. P.V B.Tech Graduate, Department of Information Technology, SivaSankari.S Assistant Professor, Department of Information Technology, Vignesh Mani B.Tech Graduate,
Task Based Programming Revisited Real Time Operating Systems
 ECE3411 Fall 2016 Lecture 6a. Task Based Programming Revisited Real Time Operating Systems Marten van Dijk, Syed Kamran Haider Department of Electrical & Computer Engineering University of Connecticut
ECE3411 Fall 2016 Lecture 6a. Task Based Programming Revisited Real Time Operating Systems Marten van Dijk, Syed Kamran Haider Department of Electrical & Computer Engineering University of Connecticut
1.8inch LCD Module USER MANUAL
 1.8inch LCD Module USER MANUAL OVERVIEW This product is 1.8inch resistive screen module with resolution 128x160. It has internal controller and uses SPI interface for communication. It has already basic
1.8inch LCD Module USER MANUAL OVERVIEW This product is 1.8inch resistive screen module with resolution 128x160. It has internal controller and uses SPI interface for communication. It has already basic
Carl Peto. 10th August 2017 SWIFT FOR ARDUINO
 Carl Peto 10th August 2017 SWIFT FOR ARDUINO ARDUINO Microcontrollers are a small, cheap, multi purpose IoT computer in a box, with built in interfaces in the package, all in one chip. They can be bought
Carl Peto 10th August 2017 SWIFT FOR ARDUINO ARDUINO Microcontrollers are a small, cheap, multi purpose IoT computer in a box, with built in interfaces in the package, all in one chip. They can be bought
Mobile Operating Systems Lesson 01 Operating System
 Mobile Operating Systems Lesson 01 Operating System Oxford University Press 2007. All rights reserved. 1 Operating system (OS) The master control program Manages all software and hardware resources Controls,
Mobile Operating Systems Lesson 01 Operating System Oxford University Press 2007. All rights reserved. 1 Operating system (OS) The master control program Manages all software and hardware resources Controls,
SimXMD Simulation-based HW/SW Co-debugging for field-programmable Systems-on-Chip
 SimXMD Simulation-based HW/SW Co-debugging for field-programmable Systems-on-Chip Ruediger Willenberg and Paul Chow High-Performance Reconfigurable Computing Group University of Toronto September 4, 2013
SimXMD Simulation-based HW/SW Co-debugging for field-programmable Systems-on-Chip Ruediger Willenberg and Paul Chow High-Performance Reconfigurable Computing Group University of Toronto September 4, 2013
Efficiency and memory footprint of Xilkernel for the Microblaze soft processor
 Efficiency and memory footprint of Xilkernel for the Microblaze soft processor Dariusz Caban, Institute of Informatics, Gliwice, Poland - June 18, 2014 The use of a real-time multitasking kernel simplifies
Efficiency and memory footprint of Xilkernel for the Microblaze soft processor Dariusz Caban, Institute of Informatics, Gliwice, Poland - June 18, 2014 The use of a real-time multitasking kernel simplifies
ECE 471 Embedded Systems Lecture 2
 ECE 471 Embedded Systems Lecture 2 Vince Weaver http://www.eece.maine.edu/~vweaver vincent.weaver@maine.edu 3 September 2015 Announcements HW#1 will be posted today, due next Thursday. I will send out
ECE 471 Embedded Systems Lecture 2 Vince Weaver http://www.eece.maine.edu/~vweaver vincent.weaver@maine.edu 3 September 2015 Announcements HW#1 will be posted today, due next Thursday. I will send out
Lesson 6 Intel Galileo and Edison Prototype Development Platforms. Chapter-8 L06: "Internet of Things ", Raj Kamal, Publs.: McGraw-Hill Education
 Lesson 6 Intel Galileo and Edison Prototype Development Platforms 1 Intel Galileo Gen 2 Boards Based on the Intel Pentium architecture Includes features of single threaded, single core and 400 MHz constant
Lesson 6 Intel Galileo and Edison Prototype Development Platforms 1 Intel Galileo Gen 2 Boards Based on the Intel Pentium architecture Includes features of single threaded, single core and 400 MHz constant
ECE 7650 Scalable and Secure Internet Services and Architecture ---- A Systems Perspective. Part I: Operating system overview: Memory Management
 ECE 7650 Scalable and Secure Internet Services and Architecture ---- A Systems Perspective Part I: Operating system overview: Memory Management 1 Hardware background The role of primary memory Program
ECE 7650 Scalable and Secure Internet Services and Architecture ---- A Systems Perspective Part I: Operating system overview: Memory Management 1 Hardware background The role of primary memory Program
Hardware/Software Codesign of Schedulers for Real Time Systems
 Hardware/Software Codesign of Schedulers for Real Time Systems Jorge Ortiz Committee David Andrews, Chair Douglas Niehaus Perry Alexander Presentation Outline Background Prior work in hybrid co-design
Hardware/Software Codesign of Schedulers for Real Time Systems Jorge Ortiz Committee David Andrews, Chair Douglas Niehaus Perry Alexander Presentation Outline Background Prior work in hybrid co-design
Microcontroller Basics
 Microcontroller Basics Gabe Cohn CSE 599U February 6, 2012 www.gabeacohn.com/teaching/micro Outline Overview of Embedded Systems What is a Microcontroller? Microcontroller Features Common Microcontrollers
Microcontroller Basics Gabe Cohn CSE 599U February 6, 2012 www.gabeacohn.com/teaching/micro Outline Overview of Embedded Systems What is a Microcontroller? Microcontroller Features Common Microcontrollers
Path analysis vs. empirical determination of a system's real-time capabilities: The crucial role of latency tests
 Path analysis vs. empirical determination of a system's real-time capabilities: The crucial role of latency tests Carsten Emde Open Source Automation Development Lab (OSADL) eg Issues leading to system
Path analysis vs. empirical determination of a system's real-time capabilities: The crucial role of latency tests Carsten Emde Open Source Automation Development Lab (OSADL) eg Issues leading to system
ECE 471 Embedded Systems Lecture 15
 ECE 471 Embedded Systems Lecture 15 Vince Weaver http://web.eece.maine.edu/~vweaver vincent.weaver@maine.edu 10 October 2018 Midterm is Friday. Announcements 1 Homework #4 Review Still grading the code
ECE 471 Embedded Systems Lecture 15 Vince Weaver http://web.eece.maine.edu/~vweaver vincent.weaver@maine.edu 10 October 2018 Midterm is Friday. Announcements 1 Homework #4 Review Still grading the code
UFCETW-20-2 Examination Answer all questions in Section A (60 marks) and 2 questions from Section B (40 marks)
 and 2 questions from Section B (40 marks)") Embedded Systems Programming Exam 20010-11 Answer all questions in Section A (60 marks) and 2 questions from Section B (40 marks) Section A answer all questions (60%) A1 Embedded Systems: ARM Appendix
Embedded Systems Programming Exam 20010-11 Answer all questions in Section A (60 marks) and 2 questions from Section B (40 marks) Section A answer all questions (60%) A1 Embedded Systems: ARM Appendix
F28HS Hardware-Software Interface: Systems Programming
 F28HS Hardware-Software Interface: Systems Programming Hans-Wolfgang Loidl School of Mathematical and Computer Sciences, Heriot-Watt University, Edinburgh Semester 2 2016/17 0 No proprietary software has
F28HS Hardware-Software Interface: Systems Programming Hans-Wolfgang Loidl School of Mathematical and Computer Sciences, Heriot-Watt University, Edinburgh Semester 2 2016/17 0 No proprietary software has
Microcomputing for Art
 Microcomputing for Art Andrey Kuznetsov Freiburg i.br. 2017 Content Introduction Hardware Microcontrollers Arduino Uno R3 Atmega 328P Attiny 85 Arduino Nano V3 Pro Mini Atmega 168/328 Arduino LilyPad 328
Microcomputing for Art Andrey Kuznetsov Freiburg i.br. 2017 Content Introduction Hardware Microcontrollers Arduino Uno R3 Atmega 328P Attiny 85 Arduino Nano V3 Pro Mini Atmega 168/328 Arduino LilyPad 328
VxWin RT. KUKA Roboter GmbH Blücherstrasse 144 D Augsburg Folie 1
 VxWin RT VxWorks Windows KUKA Roboter GmbH Blücherstrasse 144 D-86165 Augsburg Folie 1 Why PC-based control? OMAC: Open, Modular Architecture Controllers White Paper published in 1994 by GM, Ford and Chrysler
VxWin RT VxWorks Windows KUKA Roboter GmbH Blücherstrasse 144 D-86165 Augsburg Folie 1 Why PC-based control? OMAC: Open, Modular Architecture Controllers White Paper published in 1994 by GM, Ford and Chrysler
EMBEDDED SYSTEMS WITH ROBOTICS AND SENSORS USING ERLANG
 EMBEDDED SYSTEMS WITH ROBOTICS AND SENSORS USING ERLANG Adam Lindberg github.com/eproxus HARDWARE COMPONENTS SOFTWARE FUTURE Boot, Serial console, Erlang shell DEMO THE GRISP BOARD SPECS Hardware & specifications
EMBEDDED SYSTEMS WITH ROBOTICS AND SENSORS USING ERLANG Adam Lindberg github.com/eproxus HARDWARE COMPONENTS SOFTWARE FUTURE Boot, Serial console, Erlang shell DEMO THE GRISP BOARD SPECS Hardware & specifications
Implementation work on open source web of things servers and gateways. Dave Raggett, W3C
 Implementation work on open source web of things servers and gateways Dave Raggett, W3C Monday, 11 April 2016 Introduction I am working on two open source Web of Things server projects NodeJS
Implementation work on open source web of things servers and gateways Dave Raggett, W3C Monday, 11 April 2016 Introduction I am working on two open source Web of Things server projects NodeJS
EMBEDDED LINUX ON ARM9 Weekend Workshop
 Here to take you beyond EMBEDDED LINUX ON ARM9 Weekend Workshop Embedded Linux on ARM9 Weekend workshop Objectives: Get you exposed with various trends in Embedded OS Leverage Opensource tools to build
Here to take you beyond EMBEDDED LINUX ON ARM9 Weekend Workshop Embedded Linux on ARM9 Weekend workshop Objectives: Get you exposed with various trends in Embedded OS Leverage Opensource tools to build
W4118: interrupt and system call. Junfeng Yang
 W4118: interrupt and system call Junfeng Yang Outline Motivation for protection Interrupt System call 2 Need for protection Kernel privileged, cannot trust user processes User processes may be malicious
W4118: interrupt and system call Junfeng Yang Outline Motivation for protection Interrupt System call 2 Need for protection Kernel privileged, cannot trust user processes User processes may be malicious
Power Management for Embedded Systems
 Power Management for Embedded Systems Minsoo Ryu Hanyang University Why Power Management? Battery-operated devices Smartphones, digital cameras, and laptops use batteries Power savings and battery run
Power Management for Embedded Systems Minsoo Ryu Hanyang University Why Power Management? Battery-operated devices Smartphones, digital cameras, and laptops use batteries Power savings and battery run
RT-MaG: an open-source SIMULINK Toolbox for Linux-Based Real-Time Robotic Applications
 : an open-source SIMULINK Toolbox for Linux-Based Real-Time Robotic Applications Manecy Augustin 1,2 Marchand Nicolas 2 Viollet Stéphane 1 1 Biorobotic Department, Aix-Marseille Université/CNRS, Marseille,
: an open-source SIMULINK Toolbox for Linux-Based Real-Time Robotic Applications Manecy Augustin 1,2 Marchand Nicolas 2 Viollet Stéphane 1 1 Biorobotic Department, Aix-Marseille Université/CNRS, Marseille,
BR03 Raspberry Pi Zero Bridge
 BR03 Raspberry Pi Zero Bridge BR03 Datasheet [pdf of Wiki product page] This xchip is designed to interface with the Raspberry Pi Zero module. xchips. [relevant for this BR03]. This xchip is designed to
BR03 Raspberry Pi Zero Bridge BR03 Datasheet [pdf of Wiki product page] This xchip is designed to interface with the Raspberry Pi Zero module. xchips. [relevant for this BR03]. This xchip is designed to