Self Driving. DNN * * Reinforcement * Unsupervised *
|
|
|
- Marvin Wilson
- 5 years ago
- Views:
Transcription
1 CNN 응용
2 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection (HOG+SVM) Detection/ Segmentat ion/classif ication Dry/wet road classificati on ADAS Planning/ Control Optimal control End-toend Learning End-toend Learning Tasks Driver state Behavior Prediction/ Driver identificati on Vehicle Diagnosis Smart factory DNN * * Reinforcement * Unsupervised * *




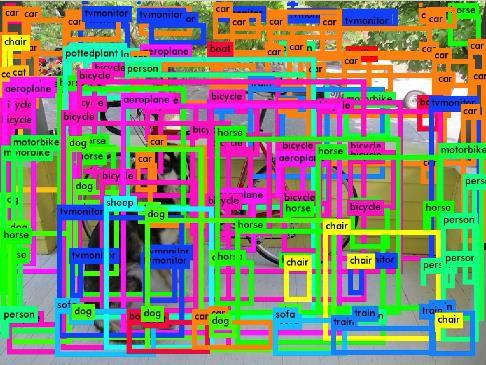
3 Classification/Detection/Segmentation Image Classification Object Detection Semantic Segmentation

4 Detection/Segmentation
5 OBJECT DETECTION
6 Computer Vision Tasks

7 Detection as (classification+regression)?
?")
8 Detection as (classification+regression)? Need variable sized outputs
 Problem: Need to test many positions and")


9 Detection as classification Detection as classification (e.g., sliding windows) Problem: Need to test many positions and scales Solution: If your classifier is fast enough, just do it! t Detection with a CNN classifier Problem: Need to test many positions and scales, and use a computationally demanding classifier Solution: Only look at a tiny subset of possible positions

10 Region Proposals
11 R-CNN (REGIONS WITH CNN FEATURES)

12 R-CNN
13 R-CNN
14 R-CNN
15 R-CNN

16 R-CNN
17 R-CNN
18 Limitations of R-CNN Ad hoc training objectives Fine tune network with softmax classifier (log loss) Train post-hoc linear SVMs (hinge loss) Train post-hoc bounding box regressions (least squares) Training is slow (84h), takes a lot of disk space Inference (detection) is slow 47s / image with VGG16
19 FAST R-CNN

20 Fast R-CNN (test time)

21 Fast R-CNN (training time)
22 Comparison Fast R-CNN R-CNN Train time (h) Speedup 8.8x 1x Test time/image 0.32s 47.0s Test speedup 146x 1x map Timings exclude object proposal time, which is equal for all methods. All methods use VGG16 from Simonyan and Zisserman.
23 Fast R-CNN Pros End-to-end training of deep ConvNets for detection Fast training times Cons Out-of-network region proposals Selective search: 2s/image Solution Test-time speeds don t include region proposals Just make the CNN do region proposals too!
24 FASTER R-CNN

25 Faster RCNN Insert a Region Proposal Network (RPN) after the last convolutional layer RPN trained to produce region proposals directly no need for external region proposals! After RPN, use RoI Pooling and an upstream classifier and bbox regressor just like Fast R-CNN
26 Faster R-CNN: RPN Slide a small window on the feature map Build a small network for: classifying object or not-object, and regressing bbox locations Position of the sliding window provides localization information with reference to the image Box regression provides finer localization information with reference to this sliding window
27 Faster R-CNN Use k (=9) anchor boxes at each location Anchors are translation invariant: use the same ones at every location Regression gives offsets from anchor boxes Classification gives the probability that each (regressed) anchor shows an object
28 Results Test time per image (with proposals) R-CNN Fast R-CNN Faster R-CNN 50 seconds 2 seconds 0.2 seconds Speedup 1x 25x 250x map (VOC 2007)

29 ImageNet Detection

30 Object detection in the wild by Faster R-CNN + ResNet
31 Code links R-CNN Caffe + Matlab ( Faster R-CNN Caffe + Matlab ( Faster R-CNN Caffe + Matlab ( Caffe + Python ( YOLO
32 YOLO: YOU ONLY LOOK ONCE
 : 2 # Predictions of bounding box (P) : 5 (x, y, h, w, confidence) # Class probabilities (C) :")
33 YOLO algorithm Input & Output - Input : resized image - Output : tensor (S S (B P + C)) S # Bounding box (B) : 2 # Predictions of bounding box (P) : 5 (x, y, h, w, confidence) # Class probabilities (C) : 20 S
")
34 YOLO algorithm Divide image into S x S grid Within each grid cell predict: B Boxes: 4 coordinates + confidence Class scores: C numbers Regression from image to 7 7 (5 B + C) tensor
35 YOLO algorithm Network architecture - Similar to GoogLeNet model reduction layers instead of Inception layer - Use leaky rectified linear activation function
36 YOLO algorithm Loss function S E θ = λ 2 coord i=0 B obj j=0 1 i,j x i x i 2 + y i y i 2 S + λ 2 coord i=0 B obj j=0 1 i,j w i w i 2 + hi h i 2 S + 2 i=0 B j=0 1 obj 2 i,j C i C i + S 2 λnoobj i=0 B j=0 1 i,j noobj C i C i 2 + i=0 S 2 obj 1 i,j B c classes p i (c) p i (c) 2

37 YOLO algorithm Thresholding th = 0.2 th = 0

38 YOLO: You Only Look Once Faster than Faster R-CNN, but not as good

39 Demo Videos
40 OBJECT SEGMENTATION

41 Computer Vision Tasks

42 Semantic segmentation Label every pixel Don t differentiate instances
43 FULLY CONNECTED LAYERS AS CONVOLUTION LAYERS


44 FC layer as Conv layer Image classification 1 Query image convolution Fully connected Output vector (1x1x21) Semantic segmentation Given an input image, obtain pixel-wise segmentation mask using a deep Convolutional Neural Network (CNN) Query image convolution Output map(16x16x21)

45 FC layer as Conv layer Transforming fully connected layers into convolution layers enables a classification net to output a heatmap

46 Encoder/Decoder

47 Microsoft Deep Learning Semantic Image Segmentation
48
49 코드예시 U-net
50 MORE APPLICATIONS
51 BEHAVIOR REFLEX APPROACH
52 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection (HOG+SVM) 3D object Detection Dry/wet road classificati on ADAS Planning/ Control Optimal control End-toend Learning End-toend Learning Tasks Driver state Behavior Prediction/ Driver identificati on Vehicle Diagnosis Smart factory DNN * * Reinforcement * Unsupervised * *
53 DAVE-1

54 DAVE-1 Development period : CNN structure is different with today s usual CNN structure Input : two camera (YUV channel) 320 x 240 input image are resized to 149 x 58 using LPF Learning handle angle from remote control Learning 4 days using Intel Xeon 3.0GHz CPU Reference DAVE robot Muller, Urs, et al. "Off-road obstacle avoidance through end-to-end learning."advances in neural information processing systems
55 Overview 2 Camera(YUV) 6-Layer CNN 2 outputs (Turn Left, Turn Right)


56 Result Input images and CNN Layer results Actual driving result
57 END TO END LEARNING FOR SELF- DRIVING CARS 2016 Apr, arxiv, NVIDIA New Jersey


58 DRIVE PX The Project DAVE 2 NVIDIA started the

59 Main Idea Single Camera input Steering command output through a trained CNN model Primary Motivation The driving system avoid: - the need to recognize human-designated features like lane markings, guard rails.. - having a collection of if, then, else rules
60 DAVE-1(2004) vs DAVE-2(2016) The small car The real car Advance performance of training (GPGPU) Advanced CNN model Newly collected training data

61 Network Architecture In order to minimize the MSE (between steering command output & human driver) YUV input The first layer: hard-coded normalization Convolutional layers: Fully connected Convolutional layers TensorFlow codes Normalization
62 NVIDIA autonomous car driving video On road test: For 10 miles driving, autonomous 98% of the time.
 https://www.facebook.")
63 Trivia, Yann LeCun s post on fb Mr. LeCun participated in DAVE-1 project, 2004(below)
64 DIRECT PERCEPTION APPROACH C. Chen et al. ICCV 2015
65 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection (HOG+SVM) Affordance estimation Dry/wet road classificati on ADAS Planning/ Control Optimal control End-toend Learning End-toend Learning Tasks Driver state Behavior Prediction/ Driver identificati on Vehicle Diagnosis Smart factory DNN * * Reinforcement * Unsupervised * *
66 DeepDriving Direct perception Estimate the affordance for driving instead of visually parsing the entire scene or blindly mapping an image to controls Mapping an input image to a small number of key perception indicators that directly related to the affordance of a road/traffic state Approach Built upon deep convolution neural network Trained and tested on TORCS (The Open Racing Car Simulator) Automatically learn image features for estimating affordance related to autonomous driving Much simpler structure than the typical mediated perception approach More interpretable than the typical behavior reflex approach
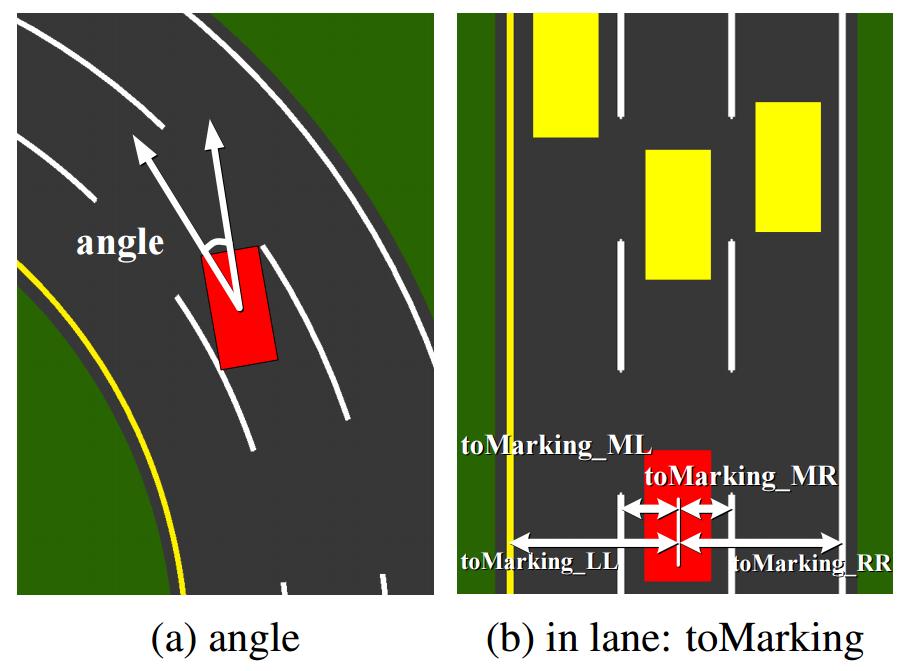

67 Affordance

68 Affordance indicators



69 Affordance estimation - CNN Model Learning AlexNet Supervised Learning (484,815 Training images) 13 Affordances Angle tomarking_ml tomarking_m
 Cars (22 kinds) B. Wymann, E. Espie, C. Guionneau, C. Dimitrakakis, R. Coulom, and A. Sumner. TORCS, The Open Racing Car Simulator. http://www.torcs.org, 2014")
70 Training Dataset TORCS(The Open Racing Car Simulator) Collect indicators (human control data) Speed of host car Position of host car Distance to the preceding car Tracks (7 Tracks) Cars (22 kinds) B. Wymann, E. Espie, C. Guionneau, C. Dimitrakakis, R. Coulom, and A. Sumner. TORCS, The Open Racing Car Simulator

71 Visualization of Learned models
72 Result
73 BAKCUPS
74 KITTI DATASET
")

75 Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite (CVPR, 2012) Sturm, Jürgen, et al. "A benchmark for the evaluation of RGB-D SLAM systems." 2012 IEEE/RSJ ICIRS2012.



76 An Empirical Evaluation of Deep Learning on Highway Driving Huval, Brody, et al. "An empirical evaluation of deep learning on highway driving." arxiv preprint arxiv: (2015).
 : OXTS RT 3003 1 Laser scanner : Velodyne HDL-64E 2 Grayscale")
 4 Varifocal lenses : Edmund Optics NT59-917 실제데이터수집을위한차량및센서설계도")
77 KITTI Benchmark suite Sensor Setup 다양한센서가탑재된자동차로실제주행을통해데이터수집 1 Navigation System(GPS/IMU) : OXTS RT Laser scanner : Velodyne HDL-64E 2 Grayscale cameras : Point Grey Flea 2 (FL2-14S3M-C) 2 Color cameras : Point Grey Flea 2 (FL2-14S3C-C) 4 Varifocal lenses : Edmund Optics NT 실제데이터수집을위한차량및센서설계도 실제차량사진
 Stereo & Optical")
78 KITTI Benchmark suite Ground truth(1/3) Stereo & Optical Flow
")
79 KITTI Benchmark suite Ground truth(2/3) Odometry
 Object Detection &")
80 KITTI Benchmark suite Ground truth(3/3) Object Detection & Tracking
![KITTI Benchmark suite 다양한비전기술에대한 Ground truth 가존재 Stereo [1],[4] Optical Flow [1],[4] Odometry [1] Object detection [1] Tracking [1] Road/Lane detection [1] Raw data 제공 [3] Reference KITTI Benchmark](/docs-images/91/106774481/images/81-0.jpg "suite [1] Geiger, Andreas, Philip Lenz, and Raquel Urtasun. \"Are we ready for autonomous driving? the kitti vision benchmark suite.")
81 KITTI Benchmark suite 다양한비전기술에대한 Ground truth 가존재 Stereo [1],[4] Optical Flow [1],[4] Odometry [1] Object detection [1] Tracking [1] Road/Lane detection [1] Raw data 제공 [3] Reference KITTI Benchmark suite [1] Geiger, Andreas, Philip Lenz, and Raquel Urtasun. "Are we ready for autonomous driving? the kitti vision benchmark suite." Computer Vision and Pattern Recognition (CVPR), 2012 IEEE Conference on. IEEE, [2] Geiger, Andreas, et al. "Vision meets robotics: The KITTI dataset." The International Journal of Robotics Research (2013): [3] Fritsch, Jannik, Tobias Kuehnl, and Andreas Geiger. "A new performance measure and evaluation benchmark for road detection algorithms." 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013). IEEE, [4] Menze, Moritz, and Andreas Geiger. "Object scene flow for autonomous vehicles." Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition
OBJECT DETECTION HYUNG IL KOO
 OBJECT DETECTION HYUNG IL KOO INTRODUCTION Computer Vision Tasks Classification + Localization Classification: C-classes Input: image Output: class label Evaluation metric: accuracy Localization Input:
OBJECT DETECTION HYUNG IL KOO INTRODUCTION Computer Vision Tasks Classification + Localization Classification: C-classes Input: image Output: class label Evaluation metric: accuracy Localization Input:
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Yiqi Yan. May 10, 2017
 Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object detection with CNNs
 Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
RECURRENT NEURAL NETWORKS
 RECURRENT NEURAL NETWORKS Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian
RECURRENT NEURAL NETWORKS Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Joint Object Detection and Viewpoint Estimation using CNN features
 Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Deep Learning for Object detection & localization
 Deep Learning for Object detection & localization RCNN, Fast RCNN, Faster RCNN, YOLO, GAP, CAM, MSROI Aaditya Prakash Sep 25, 2018 Image classification Image classification Whole of image is classified
Deep Learning for Object detection & localization RCNN, Fast RCNN, Faster RCNN, YOLO, GAP, CAM, MSROI Aaditya Prakash Sep 25, 2018 Image classification Image classification Whole of image is classified
Object Detection on Self-Driving Cars in China. Lingyun Li
 Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
Unified, real-time object detection
 Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
CS6501: Deep Learning for Visual Recognition. Object Detection I: RCNN, Fast-RCNN, Faster-RCNN
 CS6501: Deep Learning for Visual Recognition Object Detection I: RCNN, Fast-RCNN, Faster-RCNN Today s Class Object Detection The RCNN Object Detector (2014) The Fast RCNN Object Detector (2015) The Faster
CS6501: Deep Learning for Visual Recognition Object Detection I: RCNN, Fast-RCNN, Faster-RCNN Today s Class Object Detection The RCNN Object Detector (2014) The Fast RCNN Object Detector (2015) The Faster
Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs
 Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs Raymond Ptucha, Rochester Institute of Technology, USA Tutorial-9 May 19, 218 www.nvidia.com/dli R. Ptucha 18 1 Fair Use Agreement
Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs Raymond Ptucha, Rochester Institute of Technology, USA Tutorial-9 May 19, 218 www.nvidia.com/dli R. Ptucha 18 1 Fair Use Agreement
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren Kaiming He Ross Girshick Jian Sun Present by: Yixin Yang Mingdong Wang 1 Object Detection 2 1 Applications Basic
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren Kaiming He Ross Girshick Jian Sun Present by: Yixin Yang Mingdong Wang 1 Object Detection 2 1 Applications Basic
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization
 Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization Marcus A. Brubaker (Toyota Technological Institute at Chicago) Andreas Geiger (Karlsruhe Institute of Technology & MPI Tübingen) Raquel
Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization Marcus A. Brubaker (Toyota Technological Institute at Chicago) Andreas Geiger (Karlsruhe Institute of Technology & MPI Tübingen) Raquel
Encoder-Decoder Networks for Semantic Segmentation. Sachin Mehta
 Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Computer Vision Lecture 16
 Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Visual features detection based on deep neural network in autonomous driving tasks
 430 Fomin I., Gromoshinskii D., Stepanov D. Visual features detection based on deep neural network in autonomous driving tasks Ivan Fomin, Dmitrii Gromoshinskii, Dmitry Stepanov Computer vision lab Russian
430 Fomin I., Gromoshinskii D., Stepanov D. Visual features detection based on deep neural network in autonomous driving tasks Ivan Fomin, Dmitrii Gromoshinskii, Dmitry Stepanov Computer vision lab Russian
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Vision based autonomous driving - A survey of recent methods. -Tejus Gupta
 Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
arxiv: v1 [cs.cv] 1 May 2015
![arxiv: v1 [cs.cv] 1 May 2015](/thumbs/76/73858626.jpg "arxiv: v1 [cs.cv] 1 May 2015") DeepDriving: Learning Affordance for Direct Perception in Autonomous Driving Chenyi Chen Ari Seff Alain Kornhauser Jianxiong Xiao Princeton University http://deepdriving.cs.princeton.edu arxiv:1.26v1 [cs.cv]
DeepDriving: Learning Affordance for Direct Perception in Autonomous Driving Chenyi Chen Ari Seff Alain Kornhauser Jianxiong Xiao Princeton University http://deepdriving.cs.princeton.edu arxiv:1.26v1 [cs.cv]
Lecture 5: Object Detection
 Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Fuzzy Set Theory in Computer Vision: Example 3
 Fuzzy Set Theory in Computer Vision: Example 3 Derek T. Anderson and James M. Keller FUZZ-IEEE, July 2017 Overview Purpose of these slides are to make you aware of a few of the different CNN architectures
Fuzzy Set Theory in Computer Vision: Example 3 Derek T. Anderson and James M. Keller FUZZ-IEEE, July 2017 Overview Purpose of these slides are to make you aware of a few of the different CNN architectures
Object Detection and Its Implementation on Android Devices
 Object Detection and Its Implementation on Android Devices Zhongjie Li Stanford University 450 Serra Mall, Stanford, CA 94305 jay2015@stanford.edu Rao Zhang Stanford University 450 Serra Mall, Stanford,
Object Detection and Its Implementation on Android Devices Zhongjie Li Stanford University 450 Serra Mall, Stanford, CA 94305 jay2015@stanford.edu Rao Zhang Stanford University 450 Serra Mall, Stanford,
Optimizing Object Detection:
 Lecture 10: Optimizing Object Detection: A Case Study of R-CNN, Fast R-CNN, and Faster R-CNN Visual Computing Systems Today s task: object detection Image classification: what is the object in this image?
Lecture 10: Optimizing Object Detection: A Case Study of R-CNN, Fast R-CNN, and Faster R-CNN Visual Computing Systems Today s task: object detection Image classification: what is the object in this image?
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm
 CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
MCMOT: Multi-Class Multi-Object Tracking using Changing Point Detection
 MCMOT: Multi-Class Multi-Object Tracking using Changing Point Detection ILSVRC 2016 Object Detection from Video Byungjae Lee¹, Songguo Jin¹, Enkhbayar Erdenee¹, Mi Young Nam², Young Gui Jung², Phill Kyu
MCMOT: Multi-Class Multi-Object Tracking using Changing Point Detection ILSVRC 2016 Object Detection from Video Byungjae Lee¹, Songguo Jin¹, Enkhbayar Erdenee¹, Mi Young Nam², Young Gui Jung², Phill Kyu
Fully Convolutional Networks for Semantic Segmentation
 Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Why Is Recognition Hard? Object Recognizer
 Why Is Recognition Hard? Object Recognizer panda Why is Recognition Hard? Object Recognizer panda Pose Why is Recognition Hard? Object Recognizer panda Occlusion Why is Recognition Hard? Object Recognizer
Why Is Recognition Hard? Object Recognizer panda Why is Recognition Hard? Object Recognizer panda Pose Why is Recognition Hard? Object Recognizer panda Occlusion Why is Recognition Hard? Object Recognizer
YOLO9000: Better, Faster, Stronger
 YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Introduction to Deep Learning in Signal Processing & Communications with MATLAB
 Introduction to Deep Learning in Signal Processing & Communications with MATLAB Dr. Amod Anandkumar Pallavi Kar Application Engineering Group, Mathworks India 2019 The MathWorks, Inc. 1 Different Types
Introduction to Deep Learning in Signal Processing & Communications with MATLAB Dr. Amod Anandkumar Pallavi Kar Application Engineering Group, Mathworks India 2019 The MathWorks, Inc. 1 Different Types
DEEP NEURAL NETWORKS FOR OBJECT DETECTION
 DEEP NEURAL NETWORKS FOR OBJECT DETECTION Sergey Nikolenko Steklov Institute of Mathematics at St. Petersburg October 21, 2017, St. Petersburg, Russia Outline Bird s eye overview of deep learning Convolutional
DEEP NEURAL NETWORKS FOR OBJECT DETECTION Sergey Nikolenko Steklov Institute of Mathematics at St. Petersburg October 21, 2017, St. Petersburg, Russia Outline Bird s eye overview of deep learning Convolutional
R-FCN: Object Detection with Really - Friggin Convolutional Networks
 R-FCN: Object Detection with Really - Friggin Convolutional Networks Jifeng Dai Microsoft Research Li Yi Tsinghua Univ. Kaiming He FAIR Jian Sun Microsoft Research NIPS, 2016 Or Region-based Fully Convolutional
R-FCN: Object Detection with Really - Friggin Convolutional Networks Jifeng Dai Microsoft Research Li Yi Tsinghua Univ. Kaiming He FAIR Jian Sun Microsoft Research NIPS, 2016 Or Region-based Fully Convolutional
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
COMP 551 Applied Machine Learning Lecture 16: Deep Learning
 COMP 551 Applied Machine Learning Lecture 16: Deep Learning Instructor: Ryan Lowe (ryan.lowe@cs.mcgill.ca) Slides mostly by: Class web page: www.cs.mcgill.ca/~hvanho2/comp551 Unless otherwise noted, all
COMP 551 Applied Machine Learning Lecture 16: Deep Learning Instructor: Ryan Lowe (ryan.lowe@cs.mcgill.ca) Slides mostly by: Class web page: www.cs.mcgill.ca/~hvanho2/comp551 Unless otherwise noted, all
Depth from Stereo. Dominic Cheng February 7, 2018
 Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Convolutional Neural Networks. Computer Vision Jia-Bin Huang, Virginia Tech
 Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
3 Object Detection. BVM 2018 Tutorial: Advanced Deep Learning Methods. Paul F. Jaeger, Division of Medical Image Computing
 3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
Semantic Segmentation
 Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Ryerson University CP8208. Soft Computing and Machine Intelligence. Naive Road-Detection using CNNS. Authors: Sarah Asiri - Domenic Curro
 Ryerson University CP8208 Soft Computing and Machine Intelligence Naive Road-Detection using CNNS Authors: Sarah Asiri - Domenic Curro April 24 2016 Contents 1 Abstract 2 2 Introduction 2 3 Motivation
Ryerson University CP8208 Soft Computing and Machine Intelligence Naive Road-Detection using CNNS Authors: Sarah Asiri - Domenic Curro April 24 2016 Contents 1 Abstract 2 2 Introduction 2 3 Motivation
AUTONOMOUS DRONE NAVIGATION WITH DEEP LEARNING
 AUTONOMOUS DRONE NAVIGATION WITH DEEP LEARNING Nikolai Smolyanskiy, Alexey Kamenev, Jeffrey Smith Project Redtail May 8, 2017 100% AUTONOMOUS FLIGHT OVER 1 KM FOREST TRAIL AT 3 M/S 2 Why autonomous path
AUTONOMOUS DRONE NAVIGATION WITH DEEP LEARNING Nikolai Smolyanskiy, Alexey Kamenev, Jeffrey Smith Project Redtail May 8, 2017 100% AUTONOMOUS FLIGHT OVER 1 KM FOREST TRAIL AT 3 M/S 2 Why autonomous path
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation Ross Girshick, Jeff Donahue, Trevor Darrell, Jitendra Malik Presented by Pandian Raju and Jialin Wu Last class SGD for Document
Rich feature hierarchies for accurate object detection and semantic segmentation Ross Girshick, Jeff Donahue, Trevor Darrell, Jitendra Malik Presented by Pandian Raju and Jialin Wu Last class SGD for Document
Final Report: Smart Trash Net: Waste Localization and Classification
 Final Report: Smart Trash Net: Waste Localization and Classification Oluwasanya Awe oawe@stanford.edu Robel Mengistu robel@stanford.edu December 15, 2017 Vikram Sreedhar vsreed@stanford.edu Abstract Given
Final Report: Smart Trash Net: Waste Localization and Classification Oluwasanya Awe oawe@stanford.edu Robel Mengistu robel@stanford.edu December 15, 2017 Vikram Sreedhar vsreed@stanford.edu Abstract Given
VISION FOR AUTOMOTIVE DRIVING
 VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
Deep Learning in Visual Recognition. Thanks Da Zhang for the slides
 Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE. Dennis Lui August 2017
 DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE Dennis Lui August 2017 THE RISE OF GPU COMPUTING APPLICATIONS 10 7 10 6 GPU-Computing perf 1.5X per year 1000X by 2025 ALGORITHMS 10 5 1.1X
DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE Dennis Lui August 2017 THE RISE OF GPU COMPUTING APPLICATIONS 10 7 10 6 GPU-Computing perf 1.5X per year 1000X by 2025 ALGORITHMS 10 5 1.1X
Automatic detection of books based on Faster R-CNN
 Automatic detection of books based on Faster R-CNN Beibei Zhu, Xiaoyu Wu, Lei Yang, Yinghua Shen School of Information Engineering, Communication University of China Beijing, China e-mail: zhubeibei@cuc.edu.cn,
Automatic detection of books based on Faster R-CNN Beibei Zhu, Xiaoyu Wu, Lei Yang, Yinghua Shen School of Information Engineering, Communication University of China Beijing, China e-mail: zhubeibei@cuc.edu.cn,
Object Detection. Part1. Presenter: Dae-Yong
 Object Part1 Presenter: Dae-Yong Contents 1. What is an Object? 2. Traditional Object Detector 3. Deep Learning-based Object Detector What is an Object? Subset of Object Recognition What is an Object?
Object Part1 Presenter: Dae-Yong Contents 1. What is an Object? 2. Traditional Object Detector 3. Deep Learning-based Object Detector What is an Object? Subset of Object Recognition What is an Object?
CNNS FROM THE BASICS TO RECENT ADVANCES. Dmytro Mishkin Center for Machine Perception Czech Technical University in Prague
 CNNS FROM THE BASICS TO RECENT ADVANCES Dmytro Mishkin Center for Machine Perception Czech Technical University in Prague ducha.aiki@gmail.com OUTLINE Short review of the CNN design Architecture progress
CNNS FROM THE BASICS TO RECENT ADVANCES Dmytro Mishkin Center for Machine Perception Czech Technical University in Prague ducha.aiki@gmail.com OUTLINE Short review of the CNN design Architecture progress
Architecting new deep neural networks for embedded applications
 Architecting new deep neural networks for embedded applications Forrest Iandola 1 Machine Learning in 2012 Sentiment Analysis LDA Object Detection Deformable Parts Model Word Prediction Linear Interpolation
Architecting new deep neural networks for embedded applications Forrest Iandola 1 Machine Learning in 2012 Sentiment Analysis LDA Object Detection Deformable Parts Model Word Prediction Linear Interpolation
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
Fully Convolutional Network for Depth Estimation and Semantic Segmentation
 Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Efficient Segmentation-Aided Text Detection For Intelligent Robots
 Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
A Novel Representation and Pipeline for Object Detection
 A Novel Representation and Pipeline for Object Detection Vishakh Hegde Stanford University vishakh@stanford.edu Manik Dhar Stanford University dmanik@stanford.edu Abstract Object detection is an important
A Novel Representation and Pipeline for Object Detection Vishakh Hegde Stanford University vishakh@stanford.edu Manik Dhar Stanford University dmanik@stanford.edu Abstract Object detection is an important
Know your data - many types of networks
 Architectures Know your data - many types of networks Fixed length representation Variable length representation Online video sequences, or samples of different sizes Images Specific architectures for
Architectures Know your data - many types of networks Fixed length representation Variable length representation Online video sequences, or samples of different sizes Images Specific architectures for
R-FCN: OBJECT DETECTION VIA REGION-BASED FULLY CONVOLUTIONAL NETWORKS
 R-FCN: OBJECT DETECTION VIA REGION-BASED FULLY CONVOLUTIONAL NETWORKS JIFENG DAI YI LI KAIMING HE JIAN SUN MICROSOFT RESEARCH TSINGHUA UNIVERSITY MICROSOFT RESEARCH MICROSOFT RESEARCH SPEED/ACCURACY TRADE-OFFS
R-FCN: OBJECT DETECTION VIA REGION-BASED FULLY CONVOLUTIONAL NETWORKS JIFENG DAI YI LI KAIMING HE JIAN SUN MICROSOFT RESEARCH TSINGHUA UNIVERSITY MICROSOFT RESEARCH MICROSOFT RESEARCH SPEED/ACCURACY TRADE-OFFS
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
Deconvolutions in Convolutional Neural Networks
 Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task
 Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving. Frank Schuster, Dr. Martin Haueis
 Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Object Detection. TA : Young-geun Kim. Biostatistics Lab., Seoul National University. March-June, 2018
 Object Detection TA : Young-geun Kim Biostatistics Lab., Seoul National University March-June, 2018 Seoul National University Deep Learning March-June, 2018 1 / 57 Index 1 Introduction 2 R-CNN 3 YOLO 4
Object Detection TA : Young-geun Kim Biostatistics Lab., Seoul National University March-June, 2018 Seoul National University Deep Learning March-June, 2018 1 / 57 Index 1 Introduction 2 R-CNN 3 YOLO 4
arxiv: v1 [cs.cv] 22 Jan 2019
![arxiv: v1 [cs.cv] 22 Jan 2019](/thumbs/88/115378851.jpg "arxiv: v1 [cs.cv] 22 Jan 2019") Use of First and Third Person Views for Deep Intersection Classification Takeda Koji Tanaka Kanji arxiv:1901.07446v1 [cs.cv] 22 Jan 2019 ABSTRACT We explore the problem of intersection classification using
Use of First and Third Person Views for Deep Intersection Classification Takeda Koji Tanaka Kanji arxiv:1901.07446v1 [cs.cv] 22 Jan 2019 ABSTRACT We explore the problem of intersection classification using
Tutorial on Keras CAP ADVANCED COMPUTER VISION SPRING 2018 KISHAN S ATHREY
 Tutorial on Keras CAP 6412 - ADVANCED COMPUTER VISION SPRING 2018 KISHAN S ATHREY Deep learning packages TensorFlow Google PyTorch Facebook AI research Keras Francois Chollet (now at Google) Chainer Company
Tutorial on Keras CAP 6412 - ADVANCED COMPUTER VISION SPRING 2018 KISHAN S ATHREY Deep learning packages TensorFlow Google PyTorch Facebook AI research Keras Francois Chollet (now at Google) Chainer Company
CS 1674: Intro to Computer Vision. Object Recognition. Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018
 CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
Mask R-CNN. By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi
 Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Flow-Based Video Recognition
 Flow-Based Video Recognition Jifeng Dai Visual Computing Group, Microsoft Research Asia Joint work with Xizhou Zhu*, Yuwen Xiong*, Yujie Wang*, Lu Yuan and Yichen Wei (* interns) Talk pipeline Introduction
Flow-Based Video Recognition Jifeng Dai Visual Computing Group, Microsoft Research Asia Joint work with Xizhou Zhu*, Yuwen Xiong*, Yujie Wang*, Lu Yuan and Yichen Wei (* interns) Talk pipeline Introduction
Deep Learning for Computer Vision with MATLAB By Jon Cherrie
 Deep Learning for Computer Vision with MATLAB By Jon Cherrie 2015 The MathWorks, Inc. 1 Deep learning is getting a lot of attention "Dahl and his colleagues won $22,000 with a deeplearning system. 'We
Deep Learning for Computer Vision with MATLAB By Jon Cherrie 2015 The MathWorks, Inc. 1 Deep learning is getting a lot of attention "Dahl and his colleagues won $22,000 with a deeplearning system. 'We
CS231N Section. Video Understanding 6/1/2018
 CS231N Section Video Understanding 6/1/2018 Outline Background / Motivation / History Video Datasets Models Pre-deep learning CNN + RNN 3D convolution Two-stream What we ve seen in class so far... Image
CS231N Section Video Understanding 6/1/2018 Outline Background / Motivation / History Video Datasets Models Pre-deep learning CNN + RNN 3D convolution Two-stream What we ve seen in class so far... Image
An Exploration of Computer Vision Techniques for Bird Species Classification
 An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
All You Want To Know About CNNs. Yukun Zhu
 All You Want To Know About CNNs Yukun Zhu Deep Learning Deep Learning Image from http://imgur.com/ Deep Learning Image from http://imgur.com/ Deep Learning Image from http://imgur.com/ Deep Learning Image
All You Want To Know About CNNs Yukun Zhu Deep Learning Deep Learning Image from http://imgur.com/ Deep Learning Image from http://imgur.com/ Deep Learning Image from http://imgur.com/ Deep Learning Image
Scene Text Recognition for Augmented Reality. Sagar G V Adviser: Prof. Bharadwaj Amrutur Indian Institute Of Science
 Scene Text Recognition for Augmented Reality Sagar G V Adviser: Prof. Bharadwaj Amrutur Indian Institute Of Science Outline Research area and motivation Finding text in natural scenes Prior art Improving
Scene Text Recognition for Augmented Reality Sagar G V Adviser: Prof. Bharadwaj Amrutur Indian Institute Of Science Outline Research area and motivation Finding text in natural scenes Prior art Improving
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Deep Learning Based Real-time Object Recognition System with Image Web Crawler
 , pp.103-110 http://dx.doi.org/10.14257/astl.2016.142.19 Deep Learning Based Real-time Object Recognition System with Image Web Crawler Myung-jae Lee 1, Hyeok-june Jeong 1, Young-guk Ha 2 1 Department
, pp.103-110 http://dx.doi.org/10.14257/astl.2016.142.19 Deep Learning Based Real-time Object Recognition System with Image Web Crawler Myung-jae Lee 1, Hyeok-june Jeong 1, Young-guk Ha 2 1 Department
Hand Detection For Grab-and-Go Groceries
 Hand Detection For Grab-and-Go Groceries Xianlei Qiu Stanford University xianlei@stanford.edu Shuying Zhang Stanford University shuyingz@stanford.edu Abstract Hands detection system is a very critical
Hand Detection For Grab-and-Go Groceries Xianlei Qiu Stanford University xianlei@stanford.edu Shuying Zhang Stanford University shuyingz@stanford.edu Abstract Hands detection system is a very critical
Illuminating Pedestrians via Simultaneous Detection & Segmentation
 Illuminating Pedestrians via Simultaneous Detection & Segmentation Garrick Brazil, Xi Yin, Xiaoming Liu Michigan State University, East Lansing, MI 48824 {brazilga, yinxi1, liuxm}@msu.edu Abstract Pedestrian
Illuminating Pedestrians via Simultaneous Detection & Segmentation Garrick Brazil, Xi Yin, Xiaoming Liu Michigan State University, East Lansing, MI 48824 {brazilga, yinxi1, liuxm}@msu.edu Abstract Pedestrian
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
Advanced Video Analysis & Imaging
 Advanced Video Analysis & Imaging (5LSH0), Module 09B Machine Learning with Convolutional Neural Networks (CNNs) - Workout Farhad G. Zanjani, Clint Sebastian, Egor Bondarev, Peter H.N. de With ( p.h.n.de.with@tue.nl
Advanced Video Analysis & Imaging (5LSH0), Module 09B Machine Learning with Convolutional Neural Networks (CNNs) - Workout Farhad G. Zanjani, Clint Sebastian, Egor Bondarev, Peter H.N. de With ( p.h.n.de.with@tue.nl
Rich feature hierarchies for accurate object detection and semant
 Rich feature hierarchies for accurate object detection and semantic segmentation Speaker: Yucong Shen 4/5/2018 Develop of Object Detection 1 DPM (Deformable parts models) 2 R-CNN 3 Fast R-CNN 4 Faster
Rich feature hierarchies for accurate object detection and semantic segmentation Speaker: Yucong Shen 4/5/2018 Develop of Object Detection 1 DPM (Deformable parts models) 2 R-CNN 3 Fast R-CNN 4 Faster
SSD: Single Shot MultiBox Detector. Author: Wei Liu et al. Presenter: Siyu Jiang
 SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains
 Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
A performance comparison of Deep Learning frameworks on KNL
 A performance comparison of Deep Learning frameworks on KNL R. Zanella, G. Fiameni, M. Rorro Middleware, Data Management - SCAI - CINECA IXPUG Bologna, March 5, 2018 Table of Contents 1. Problem description
A performance comparison of Deep Learning frameworks on KNL R. Zanella, G. Fiameni, M. Rorro Middleware, Data Management - SCAI - CINECA IXPUG Bologna, March 5, 2018 Table of Contents 1. Problem description
S7348: Deep Learning in Ford's Autonomous Vehicles. Bryan Goodman Argo AI 9 May 2017
 S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
Getting started with Caffe. Jon Barker, Solutions Architect
 Getting started with Caffe Jon Barker, Solutions Architect Caffe tour Overview Agenda Example applications Setup Performance Hands-on lab preview 2 A tour of Caffe 3 What is Caffe? An open framework for
Getting started with Caffe Jon Barker, Solutions Architect Caffe tour Overview Agenda Example applications Setup Performance Hands-on lab preview 2 A tour of Caffe 3 What is Caffe? An open framework for
arxiv: v1 [cs.cv] 15 Oct 2018
![arxiv: v1 [cs.cv] 15 Oct 2018](/thumbs/89/99052786.jpg "arxiv: v1 [cs.cv] 15 Oct 2018") Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
Yield Estimation using faster R-CNN
 Yield Estimation using faster R-CNN 1 Vidhya Sagar, 2 Sailesh J.Jain and 2 Arjun P. 1 Assistant Professor, 2 UG Scholar, Department of Computer Engineering and Science SRM Institute of Science and Technology,Chennai,
Yield Estimation using faster R-CNN 1 Vidhya Sagar, 2 Sailesh J.Jain and 2 Arjun P. 1 Assistant Professor, 2 UG Scholar, Department of Computer Engineering and Science SRM Institute of Science and Technology,Chennai,
Structured Prediction using Convolutional Neural Networks
 Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Creating Affordable and Reliable Autonomous Vehicle Systems
 Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Optical Flow and Deep Learning Based Approach to Visual Odometry
 Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 11-2016 Optical Flow and Deep Learning Based Approach to Visual Odometry Peter M. Muller pmm5983@rit.edu Follow
Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 11-2016 Optical Flow and Deep Learning Based Approach to Visual Odometry Peter M. Muller pmm5983@rit.edu Follow
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Traffic Multiple Target Detection on YOLOv2
 Traffic Multiple Target Detection on YOLOv2 Junhong Li, Huibin Ge, Ziyang Zhang, Weiqin Wang, Yi Yang Taiyuan University of Technology, Shanxi, 030600, China wangweiqin1609@link.tyut.edu.cn Abstract Background
Traffic Multiple Target Detection on YOLOv2 Junhong Li, Huibin Ge, Ziyang Zhang, Weiqin Wang, Yi Yang Taiyuan University of Technology, Shanxi, 030600, China wangweiqin1609@link.tyut.edu.cn Abstract Background