Vision based autonomous driving - A survey of recent methods. -Tejus Gupta
|
|
|
- Bruce Cooper
- 5 years ago
- Views:
Transcription
1 Vision based autonomous driving - A survey of recent methods -Tejus Gupta
2 Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using a regression model Map input image to some key variables and use this information to drive Parse entire scene to make driving decision

3 1. Directly map input image to driving action using a regression model Train a CNNs to map raw pixels from camera to steering commands. Compared to explicit decomposition of problem, such as lane detection, path planning and control, an end to end learning system optimizes for all these process simultaneously.
4 Advantages Training data easy to generate Open-sourced implementations available (Though these versions don t use any rear facing camera and don t have any memory ) Disadvantages Firstly, with other cars on the road, even when the input images are similar, different human drivers may make completely different decisions, which results in an ill-posed problem that is confusing when training a regressor. Very difficult to debug problems in end to end learning systems. How would the deep neural network learn to recover from poor positions? Data augmentation to add artificial shifts and rotations Comma.ai used GAN + RNN/LSTM to build a driving simulation which can be used to generate more data
5 End to end learning for self-driving cars by NVIDIA - They claim that their network can drive a car with less that 10 interventions needed in 15 kms of driving. Alvinn (1989, CMU), Autonomous lane vehicle using neural network, used raw image and lidar data to predict steering angle (Demo) Offroad obstacle avoidance using end to end learning (Yan Lecun, NIPS 2005) Dataset and code for comma.ai s driving simulator

6 2. Map input image to some key variables and use this information to drive Train a deep neural network to learn a mapping from image to indicators of road situation and use this compact representation for making driving decision.

7 Demo
8 Advantages Falling in between the two extremes, this representation system provides the right level of abstraction. We don t need to parse the entire scene nor do we blindly map image to steering angles. Open-sourced implementation available. (Pretrained network + Code for training) Disadvantages Pretrained network didn t work well when we tested it. Difficult to generate training data. Use simulator (TORCS, Deepdrive).
9 DeepDriving: Learning Affordance for Direct Perception in Autonomous Driving (Princeton, ICCV 2015) TORCS Open-source car simulator - Widely used for research Deepdrive.io - Hacked into GTA to use as simulator (Demo). Also has a pretrained end to end network.

10 3. Parse entire scene to make driving decision Recognize all driving relevant objects - lanes, traffic signs, traffic lights, cars, pedestrians etc.
11 Lane Detection: I am going to discuss some of the most prominent papers and the general framework for lane detection. Though a simple hough transform based method can work for 70% of highway case, this problem is deceptively hard. I couldn t find a single paper claiming that their algorithm could be tested on a real vehicle. What about DARPA urban challenge? An exact digital map of the road network coupled with updated aerial image was provided, implying if the vehicle could localize itself with less that 1 m error, it could drive blindly. (⅚ winners didn t use onboard camera). The industry is far beyond what academia does.
12 Why is lane detection difficult? Lane and road appearance diversity Image clarity issues (occlusions, shadows, glare) Poor visibility conditions

13
14 Module decomposition Image cleaning Feature extraction Road/lane model fitting Temporal integration Image to world transformation This need not be a bottom up approach, difference modules can take feedback from other modules.
15 Image cleaning Remove noise Remove clutter and irrelevant image parts e.g, remove image above horizon Identify obstacles(vehicles and pedestrians) and remove them Use image normalization to correct for over/under exposure and lens flare e.g, when entering or leaving a tunnel Remove Shadows

16

17

18
19 Feature Extraction Continuous/dashed line Narrow region with more intensity than surrounding i.e look for intensity peaks (transform image to bird eye view first) Lidar reflectance measurement Road segmentation

20
21 Lane model fitting to extract a compact high level representation The noisy features are improved by assuming a constraint on lane width or curvature The model can be parametric(lines, parabola), semi-parametric(splines) or non-parametric(continuous boundaries). The parameters are approximated by Ransac, least squares optimization or energy minimization. Temporal integration Integrate knowledge from previous frames to improve accuracy of correct detection and reducing required computation. Vehicle motion estimation is needed.


22 Case study: Caltech lane detector

23


24 Lane detection and tracking using B-Snake
25
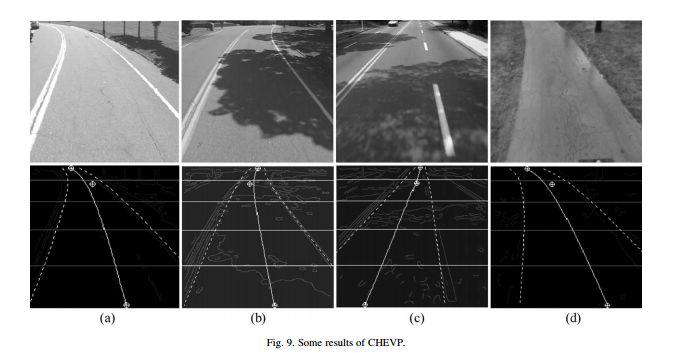
26 Robust Lane Detection and Tracking in Challenging Scenarios Lane detection using spline model
27 What if there are no lanes? How to drive at intersections? Either we should use pre-built map or we need to segment drivable region.

28 Road segmentation Both Tesla and Mobileye (industry leaders in vision based autonomous driving) use road segmentation to improve lane detection. How to segment road? Very difficult to use local features alone. Context is important. Use Deep learning.

29

30
31 Idea: Instead of detecting lane every time, why can t we build a map that has every minute detail we need and we will just fuse our current estimate into the map every time we drive through a region.(demo) These maps give us foresight outside of our sensing range and are critical when sensing becomes ambiguous. Some companies are doing just that- TomTom, HERE. Nissan, Volkswagen and BMW are collaborating with Mobileye to build such maps.
32 Thanks!
Towards Fully-automated Driving. tue-mps.org. Challenges and Potential Solutions. Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Self Driving. DNN * * Reinforcement * Unsupervised *
 CNN 응용 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection
CNN 응용 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection
ECE 6554:Advanced Computer Vision Pose Estimation
 ECE 6554:Advanced Computer Vision Pose Estimation Sujay Yadawadkar, Virginia Tech, Agenda: Pose Estimation: Part Based Models for Pose Estimation Pose Estimation with Convolutional Neural Networks (Deep
ECE 6554:Advanced Computer Vision Pose Estimation Sujay Yadawadkar, Virginia Tech, Agenda: Pose Estimation: Part Based Models for Pose Estimation Pose Estimation with Convolutional Neural Networks (Deep
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Creating Affordable and Reliable Autonomous Vehicle Systems
 Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
On Board 6D Visual Sensors for Intersection Driving Assistance Systems
 On Board 6D Visual Sensors for Intersection Driving Assistance Systems S. Nedevschi, T. Marita, R. Danescu, F. Oniga, S. Bota, I. Haller, C. Pantilie, M. Drulea, C. Golban Sergiu.Nedevschi@cs.utcluj.ro
On Board 6D Visual Sensors for Intersection Driving Assistance Systems S. Nedevschi, T. Marita, R. Danescu, F. Oniga, S. Bota, I. Haller, C. Pantilie, M. Drulea, C. Golban Sergiu.Nedevschi@cs.utcluj.ro
Sensory Augmentation for Increased Awareness of Driving Environment
 Sensory Augmentation for Increased Awareness of Driving Environment Pranay Agrawal John M. Dolan Dec. 12, 2014 Technologies for Safe and Efficient Transportation (T-SET) UTC The Robotics Institute Carnegie
Sensory Augmentation for Increased Awareness of Driving Environment Pranay Agrawal John M. Dolan Dec. 12, 2014 Technologies for Safe and Efficient Transportation (T-SET) UTC The Robotics Institute Carnegie
Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving assistance applications on smart mobile devices
 Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
T O B C A T C A S E E U R O S E N S E D E T E C T I N G O B J E C T S I N A E R I A L I M A G E R Y
 T O B C A T C A S E E U R O S E N S E D E T E C T I N G O B J E C T S I N A E R I A L I M A G E R Y Goal is to detect objects in aerial imagery. Each aerial image contains multiple useful sources of information.
T O B C A T C A S E E U R O S E N S E D E T E C T I N G O B J E C T S I N A E R I A L I M A G E R Y Goal is to detect objects in aerial imagery. Each aerial image contains multiple useful sources of information.
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Detection and Classification of Vehicles
 Detection and Classification of Vehicles Gupte et al. 2002 Zeeshan Mohammad ECG 782 Dr. Brendan Morris. Introduction Previously, magnetic loop detectors were used to count vehicles passing over them. Advantages
Detection and Classification of Vehicles Gupte et al. 2002 Zeeshan Mohammad ECG 782 Dr. Brendan Morris. Introduction Previously, magnetic loop detectors were used to count vehicles passing over them. Advantages
Pedestrian Detection Using Correlated Lidar and Image Data EECS442 Final Project Fall 2016
 edestrian Detection Using Correlated Lidar and Image Data EECS442 Final roject Fall 2016 Samuel Rohrer University of Michigan rohrer@umich.edu Ian Lin University of Michigan tiannis@umich.edu Abstract
edestrian Detection Using Correlated Lidar and Image Data EECS442 Final roject Fall 2016 Samuel Rohrer University of Michigan rohrer@umich.edu Ian Lin University of Michigan tiannis@umich.edu Abstract
Solid State LiDAR for Ubiquitous 3D Sensing
 April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded
April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded
TEGRA K1 AND THE AUTOMOTIVE INDUSTRY. Gernot Ziegler, Timo Stich
 TEGRA K1 AND THE AUTOMOTIVE INDUSTRY Gernot Ziegler, Timo Stich Previously: Tegra in Automotive Infotainment / Navigation Digital Instrument Cluster Passenger Entertainment TEGRA K1 with Kepler GPU GPU:
TEGRA K1 AND THE AUTOMOTIVE INDUSTRY Gernot Ziegler, Timo Stich Previously: Tegra in Automotive Infotainment / Navigation Digital Instrument Cluster Passenger Entertainment TEGRA K1 with Kepler GPU GPU:
arxiv: v1 [cs.cv] 1 May 2015
![arxiv: v1 [cs.cv] 1 May 2015](/thumbs/76/73858626.jpg "arxiv: v1 [cs.cv] 1 May 2015") DeepDriving: Learning Affordance for Direct Perception in Autonomous Driving Chenyi Chen Ari Seff Alain Kornhauser Jianxiong Xiao Princeton University http://deepdriving.cs.princeton.edu arxiv:1.26v1 [cs.cv]
DeepDriving: Learning Affordance for Direct Perception in Autonomous Driving Chenyi Chen Ari Seff Alain Kornhauser Jianxiong Xiao Princeton University http://deepdriving.cs.princeton.edu arxiv:1.26v1 [cs.cv]
Towards Autonomous Vehicle. What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors
 7 May 2017 Disclaimer Towards Autonomous Vehicle What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors Why Vision Sensors? Humans use both eyes as main sense
7 May 2017 Disclaimer Towards Autonomous Vehicle What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors Why Vision Sensors? Humans use both eyes as main sense
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving. Frank Schuster, Dr. Martin Haueis
 Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Self Lane Assignment Using Smart Mobile Camera For Intelligent GPS Navigation and Traffic Interpretation
 For Intelligent GPS Navigation and Traffic Interpretation Tianshi Gao Stanford University tianshig@stanford.edu 1. Introduction Imagine that you are driving on the highway at 70 mph and trying to figure
For Intelligent GPS Navigation and Traffic Interpretation Tianshi Gao Stanford University tianshig@stanford.edu 1. Introduction Imagine that you are driving on the highway at 70 mph and trying to figure
Digital Image Processing
 Digital Image Processing Traffic Congestion Analysis Dated: 28-11-2012 By: Romil Bansal (201207613) Ayush Datta (201203003) Rakesh Baddam (200930002) Abstract Traffic estimate from the static images is
Digital Image Processing Traffic Congestion Analysis Dated: 28-11-2012 By: Romil Bansal (201207613) Ayush Datta (201203003) Rakesh Baddam (200930002) Abstract Traffic estimate from the static images is
A real-time Road Boundary Detection Algorithm Based on Driverless Cars Xuekui ZHU. , Meijuan GAO2, b, Shangnian LI3, c
 4th National Conference on Electrical, Electronics and Computer Engineering (NCEECE 2015) A real-time Road Boundary Detection Algorithm Based on Driverless Cars Xuekui ZHU 1, a, Meijuan GAO2, b, Shangnian
4th National Conference on Electrical, Electronics and Computer Engineering (NCEECE 2015) A real-time Road Boundary Detection Algorithm Based on Driverless Cars Xuekui ZHU 1, a, Meijuan GAO2, b, Shangnian
On Road Vehicle Detection using Shadows
 On Road Vehicle Detection using Shadows Gilad Buchman Grasp Lab, Department of Computer and Information Science School of Engineering University of Pennsylvania, Philadelphia, PA buchmag@seas.upenn.edu
On Road Vehicle Detection using Shadows Gilad Buchman Grasp Lab, Department of Computer and Information Science School of Engineering University of Pennsylvania, Philadelphia, PA buchmag@seas.upenn.edu
TomTom Innovation. Hans Aerts VP Software Development Business Unit Automotive November 2015
 TomTom Innovation Hans Aerts VP Software Development Business Unit Automotive November 2015 Empower Movement Simplify complex technology From A to BE Innovative solutions Maps Consumer Connect people and
TomTom Innovation Hans Aerts VP Software Development Business Unit Automotive November 2015 Empower Movement Simplify complex technology From A to BE Innovative solutions Maps Consumer Connect people and
A Novel Approach to Image Segmentation for Traffic Sign Recognition Jon Jay Hack and Sidd Jagadish
 A Novel Approach to Image Segmentation for Traffic Sign Recognition Jon Jay Hack and Sidd Jagadish Introduction/Motivation: As autonomous vehicles, such as Google s self-driving car, have recently become
A Novel Approach to Image Segmentation for Traffic Sign Recognition Jon Jay Hack and Sidd Jagadish Introduction/Motivation: As autonomous vehicles, such as Google s self-driving car, have recently become
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Option Driver Assistance. Product Information
 Product Information Table of Contents 1 Overview... 3 1.1 Introduction... 3 1.2 Features and Advantages... 3 1.3 Application Areas... 4 1.4 Further Information... 5 2 Functions... 5 3 Creating the Configuration
Product Information Table of Contents 1 Overview... 3 1.1 Introduction... 3 1.2 Features and Advantages... 3 1.3 Application Areas... 4 1.4 Further Information... 5 2 Functions... 5 3 Creating the Configuration
Deep Learning for Virtual Shopping. Dr. Jürgen Sturm Group Leader RGB-D
 Deep Learning for Virtual Shopping Dr. Jürgen Sturm Group Leader RGB-D metaio GmbH Augmented Reality with the Metaio SDK: IKEA Catalogue App Metaio: Augmented Reality Metaio SDK for ios, Android and Windows
Deep Learning for Virtual Shopping Dr. Jürgen Sturm Group Leader RGB-D metaio GmbH Augmented Reality with the Metaio SDK: IKEA Catalogue App Metaio: Augmented Reality Metaio SDK for ios, Android and Windows
Automated Lane Detection by K-means Clustering: A Machine Learning Approach
 Automated Lane Detection by K-means Clustering: A Machine Learning Approach Ajaykumar R, Arpit Gupta, Prof S N Merchant, Indian Institute of Technology Bombay, Mumbai Abstract With the advent of the driverless
Automated Lane Detection by K-means Clustering: A Machine Learning Approach Ajaykumar R, Arpit Gupta, Prof S N Merchant, Indian Institute of Technology Bombay, Mumbai Abstract With the advent of the driverless
Visual Perception Using Monocular Camera
 Visual Perception Using Monocular Camera Automated Driving System Toolbox provides a suite of computer vision algorithms that use data from cameras to detect and track objects of interest such as lane
Visual Perception Using Monocular Camera Automated Driving System Toolbox provides a suite of computer vision algorithms that use data from cameras to detect and track objects of interest such as lane
Stereo Human Keypoint Estimation
 Stereo Human Keypoint Estimation Kyle Brown Stanford University Stanford Intelligent Systems Laboratory kjbrown7@stanford.edu Abstract The goal of this project is to accurately estimate human keypoint
Stereo Human Keypoint Estimation Kyle Brown Stanford University Stanford Intelligent Systems Laboratory kjbrown7@stanford.edu Abstract The goal of this project is to accurately estimate human keypoint
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet.
 Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018
 Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Computer Vision: Making machines see
 Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Korea Autonomous Vehicle Contest 2013
 Korea Autonomous Vehicle Contest 2013 Smart Mobility Team (RTOS Lab. & Dyros Lab.) Graduate School of Convergence Science and Technology Seoul National University Page 1 Contents 1. Contest Information
Korea Autonomous Vehicle Contest 2013 Smart Mobility Team (RTOS Lab. & Dyros Lab.) Graduate School of Convergence Science and Technology Seoul National University Page 1 Contents 1. Contest Information
(Deep) Learning for Robot Perception and Navigation. Wolfram Burgard
 Learning for Robot Perception and Navigation. Wolfram Burgard") (Deep) Learning for Robot Perception and Navigation Wolfram Burgard Deep Learning for Robot Perception (and Navigation) Lifeng Bo, Claas Bollen, Thomas Brox, Andreas Eitel, Dieter Fox, Gabriel L. Oliveira,
(Deep) Learning for Robot Perception and Navigation Wolfram Burgard Deep Learning for Robot Perception (and Navigation) Lifeng Bo, Claas Bollen, Thomas Brox, Andreas Eitel, Dieter Fox, Gabriel L. Oliveira,
Review for the Final
 Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Simulation: A Must for Autonomous Driving
 Simulation: A Must for Autonomous Driving NVIDIA GTC 2018 (SILICON VALLEY) / Talk ID: S8859 Rohit Ramanna Business Development Manager Smart Virtual Prototyping, ESI North America Rodolphe Tchalekian EMEA
Simulation: A Must for Autonomous Driving NVIDIA GTC 2018 (SILICON VALLEY) / Talk ID: S8859 Rohit Ramanna Business Development Manager Smart Virtual Prototyping, ESI North America Rodolphe Tchalekian EMEA
Vehicle Detection Method using Haar-like Feature on Real Time System
 Vehicle Detection Method using Haar-like Feature on Real Time System Sungji Han, Youngjoon Han and Hernsoo Hahn Abstract This paper presents a robust vehicle detection approach using Haar-like feature.
Vehicle Detection Method using Haar-like Feature on Real Time System Sungji Han, Youngjoon Han and Hernsoo Hahn Abstract This paper presents a robust vehicle detection approach using Haar-like feature.
ITS Canada Annual Conference and General Meeting. May 2013
 Evaluation of Travel Time Data Collection Technologies: An Innovative Approach for a Large- Scale Network ITS Canada Annual Conference and General Meeting May 2013 Study Steps Obtain the traffic data from
Evaluation of Travel Time Data Collection Technologies: An Innovative Approach for a Large- Scale Network ITS Canada Annual Conference and General Meeting May 2013 Study Steps Obtain the traffic data from
Cover Page. Abstract ID Paper Title. Automated extraction of linear features from vehicle-borne laser data
 Cover Page Abstract ID 8181 Paper Title Automated extraction of linear features from vehicle-borne laser data Contact Author Email Dinesh Manandhar (author1) dinesh@skl.iis.u-tokyo.ac.jp Phone +81-3-5452-6417
Cover Page Abstract ID 8181 Paper Title Automated extraction of linear features from vehicle-borne laser data Contact Author Email Dinesh Manandhar (author1) dinesh@skl.iis.u-tokyo.ac.jp Phone +81-3-5452-6417
Region-based Segmentation and Object Detection
 Region-based Segmentation and Object Detection Stephen Gould Tianshi Gao Daphne Koller Presented at NIPS 2009 Discussion and Slides by Eric Wang April 23, 2010 Outline Introduction Model Overview Model
Region-based Segmentation and Object Detection Stephen Gould Tianshi Gao Daphne Koller Presented at NIPS 2009 Discussion and Slides by Eric Wang April 23, 2010 Outline Introduction Model Overview Model
Detecting and recognizing centerlines as parabolic sections of the steerable filter response
 Detecting and recognizing centerlines as parabolic sections of the steerable filter response Petar Palašek, Petra Bosilj, Siniša Šegvić Faculty of Electrical Engineering and Computing Unska 3, 10000 Zagreb
Detecting and recognizing centerlines as parabolic sections of the steerable filter response Petar Palašek, Petra Bosilj, Siniša Šegvić Faculty of Electrical Engineering and Computing Unska 3, 10000 Zagreb
arxiv: v2 [cs.cv] 14 May 2018
![arxiv: v2 [cs.cv] 14 May 2018](/thumbs/79/79495201.jpg "arxiv: v2 [cs.cv] 14 May 2018") ContextVP: Fully Context-Aware Video Prediction Wonmin Byeon 1234, Qin Wang 1, Rupesh Kumar Srivastava 3, and Petros Koumoutsakos 1 arxiv:1710.08518v2 [cs.cv] 14 May 2018 Abstract Video prediction models
ContextVP: Fully Context-Aware Video Prediction Wonmin Byeon 1234, Qin Wang 1, Rupesh Kumar Srivastava 3, and Petros Koumoutsakos 1 arxiv:1710.08518v2 [cs.cv] 14 May 2018 Abstract Video prediction models
My Google Glass Sees Your Password!
 2014 My Smartwatch Sees Your Password! My Google Glass Sees Your Password! My iphone Sees Your Password! Qinggang Yue University of Massachusetts Lowell In Collaboration with Zhen Ling, Southeast University,
2014 My Smartwatch Sees Your Password! My Google Glass Sees Your Password! My iphone Sees Your Password! Qinggang Yue University of Massachusetts Lowell In Collaboration with Zhen Ling, Southeast University,
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder
CS 231A Computer Vision (Winter 2018) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
Learning 6D Object Pose Estimation and Tracking
 Learning 6D Object Pose Estimation and Tracking Carsten Rother presented by: Alexander Krull 21/12/2015 6D Pose Estimation Input: RGBD-image Known 3D model Output: 6D rigid body transform of object 21/12/2015
Learning 6D Object Pose Estimation and Tracking Carsten Rother presented by: Alexander Krull 21/12/2015 6D Pose Estimation Input: RGBD-image Known 3D model Output: 6D rigid body transform of object 21/12/2015
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
Collaborative Mapping with Streetlevel Images in the Wild. Yubin Kuang Co-founder and Computer Vision Lead
 Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
Pattern Recognition for Autonomous. Pattern Recognition for Autonomous. Driving. Freie Universität t Berlin. Raul Rojas
 Pattern Recognition for Autonomous Pattern Recognition for Autonomous Driving Raul Rojas Freie Universität t Berlin FU Berlin Berlin 3d model from Berlin Partner Freie Universitaet Berlin Outline of the
Pattern Recognition for Autonomous Pattern Recognition for Autonomous Driving Raul Rojas Freie Universität t Berlin FU Berlin Berlin 3d model from Berlin Partner Freie Universitaet Berlin Outline of the
Glare Spread Function (GSF) - 12 Source Angle
 - 12 Source Angle") Normalized Pixel Value POWERED BY OPTEST SOFTWARE Stray Light Measurement on LensCheck Lens Measurement Systems 1 Glare Spread Function (GSF) - 12 Source Angle 0.1 0.01 0.001 0.0001 0.00001 0.000001 1
Normalized Pixel Value POWERED BY OPTEST SOFTWARE Stray Light Measurement on LensCheck Lens Measurement Systems 1 Glare Spread Function (GSF) - 12 Source Angle 0.1 0.01 0.001 0.0001 0.00001 0.000001 1
Monitoring surrounding areas of truck-trailer combinations
 Monitoring surrounding areas of truck-trailer combinations Tobias Ehlgen 1 and Tomas Pajdla 2 1 Daimler-Chrysler Research and Technology, Ulm tobias.ehlgen@daimlerchrysler.com 2 Center of Machine Perception,
Monitoring surrounding areas of truck-trailer combinations Tobias Ehlgen 1 and Tomas Pajdla 2 1 Daimler-Chrysler Research and Technology, Ulm tobias.ehlgen@daimlerchrysler.com 2 Center of Machine Perception,
2 OVERVIEW OF RELATED WORK
 Utsushi SAKAI Jun OGATA This paper presents a pedestrian detection system based on the fusion of sensors for LIDAR and convolutional neural network based image classification. By using LIDAR our method
Utsushi SAKAI Jun OGATA This paper presents a pedestrian detection system based on the fusion of sensors for LIDAR and convolutional neural network based image classification. By using LIDAR our method
Joint Vanishing Point Extraction and Tracking. 9. June 2015 CVPR 2015 Till Kroeger, Dengxin Dai, Luc Van Gool, Computer Vision ETH Zürich
 Joint Vanishing Point Extraction and Tracking 9. June 2015 CVPR 2015 Till Kroeger, Dengxin Dai, Luc Van Gool, Computer Vision Lab @ ETH Zürich Definition: Vanishing Point = Intersection of 2D line segments,
Joint Vanishing Point Extraction and Tracking 9. June 2015 CVPR 2015 Till Kroeger, Dengxin Dai, Luc Van Gool, Computer Vision Lab @ ETH Zürich Definition: Vanishing Point = Intersection of 2D line segments,
Laserscanner Based Cooperative Pre-Data-Fusion
 Laserscanner Based Cooperative Pre-Data-Fusion 63 Laserscanner Based Cooperative Pre-Data-Fusion F. Ahlers, Ch. Stimming, Ibeo Automobile Sensor GmbH Abstract The Cooperative Pre-Data-Fusion is a novel
Laserscanner Based Cooperative Pre-Data-Fusion 63 Laserscanner Based Cooperative Pre-Data-Fusion F. Ahlers, Ch. Stimming, Ibeo Automobile Sensor GmbH Abstract The Cooperative Pre-Data-Fusion is a novel
CS231N Section. Video Understanding 6/1/2018
 CS231N Section Video Understanding 6/1/2018 Outline Background / Motivation / History Video Datasets Models Pre-deep learning CNN + RNN 3D convolution Two-stream What we ve seen in class so far... Image
CS231N Section Video Understanding 6/1/2018 Outline Background / Motivation / History Video Datasets Models Pre-deep learning CNN + RNN 3D convolution Two-stream What we ve seen in class so far... Image
Detection and Classification of Painted Road Objects for Intersection Assistance Applications
 Detection and Classification of Painted Road Objects for Intersection Assistance Applications Radu Danescu, Sergiu Nedevschi, Member, IEEE Abstract For a Driving Assistance System dedicated to intersection
Detection and Classification of Painted Road Objects for Intersection Assistance Applications Radu Danescu, Sergiu Nedevschi, Member, IEEE Abstract For a Driving Assistance System dedicated to intersection
Domain Adaptation For Mobile Robot Navigation
 Domain Adaptation For Mobile Robot Navigation David M. Bradley, J. Andrew Bagnell Robotics Institute Carnegie Mellon University Pittsburgh, 15217 dbradley, dbagnell@rec.ri.cmu.edu 1 Introduction An important
Domain Adaptation For Mobile Robot Navigation David M. Bradley, J. Andrew Bagnell Robotics Institute Carnegie Mellon University Pittsburgh, 15217 dbradley, dbagnell@rec.ri.cmu.edu 1 Introduction An important
arxiv: v1 [cs.cv] 30 Oct 2018
![arxiv: v1 [cs.cv] 30 Oct 2018](/thumbs/89/100144469.jpg "arxiv: v1 [cs.cv] 30 Oct 2018") 3D Traffic Simulation for Autonomous Vehicles in Unity and Python arxiv:1810.12552v1 [cs.cv] 30 Oct 2018 Zhijing Jin The University of Hong Kong Pok Fu Lam, Hong Kong zhijing@mit.edu Abstract Over the
3D Traffic Simulation for Autonomous Vehicles in Unity and Python arxiv:1810.12552v1 [cs.cv] 30 Oct 2018 Zhijing Jin The University of Hong Kong Pok Fu Lam, Hong Kong zhijing@mit.edu Abstract Over the
REAL-TIME AUTOMATED ROAD, LANE and CAR DETECTION for AUTONOMOUS DRIVING
 REAL-TIME AUTOMATED ROAD, LANE and CAR DETECTION for AUTONOMOUS DRIVING Tolga Birdal, Aytül Erçil Sabanci University Faculty of Engineering and Natural Sciences Orhanli - Tuzla, 34956 Istanbul, TURKEY
REAL-TIME AUTOMATED ROAD, LANE and CAR DETECTION for AUTONOMOUS DRIVING Tolga Birdal, Aytül Erçil Sabanci University Faculty of Engineering and Natural Sciences Orhanli - Tuzla, 34956 Istanbul, TURKEY
Supplementary Material for: Road Detection using Convolutional Neural Networks
 Supplementary Material for: Road Detection using Convolutional Neural Networks Aparajit Narayan 1, Elio Tuci 2, Frédéric Labrosse 1, Muhanad H. Mohammed Alkilabi 1 1 Aberystwyth University, 2 Middlesex
Supplementary Material for: Road Detection using Convolutional Neural Networks Aparajit Narayan 1, Elio Tuci 2, Frédéric Labrosse 1, Muhanad H. Mohammed Alkilabi 1 1 Aberystwyth University, 2 Middlesex
Technical Paper of HITCSC Team for The International Aerial Robotics Competition
 Technical Paper of HITCSC Team for The International Aerial Robotics Competition Qingtao Yu, Yuanhong Li, Hang Yu, Haodi Yao, Rui Xing, Qi Zhao, Xiaowei Xing Harbin Institute of Tecnology ABSTRACT This
Technical Paper of HITCSC Team for The International Aerial Robotics Competition Qingtao Yu, Yuanhong Li, Hang Yu, Haodi Yao, Rui Xing, Qi Zhao, Xiaowei Xing Harbin Institute of Tecnology ABSTRACT This
ELL 788 Computational Perception & Cognition July November 2015
 ELL 788 Computational Perception & Cognition July November 2015 Module 6 Role of context in object detection Objects and cognition Ambiguous objects Unfavorable viewing condition Context helps in object
ELL 788 Computational Perception & Cognition July November 2015 Module 6 Role of context in object detection Objects and cognition Ambiguous objects Unfavorable viewing condition Context helps in object
Machine learning for image- based localiza4on. Juho Kannala May 15, 2017
 Machine learning for image- based localiza4on Juho Kannala May 15, 2017 Contents Problem sebng (What?) Mo4va4on & applica4ons (Why?) Previous work & background (How?) Our own studies and results Open ques4ons
Machine learning for image- based localiza4on Juho Kannala May 15, 2017 Contents Problem sebng (What?) Mo4va4on & applica4ons (Why?) Previous work & background (How?) Our own studies and results Open ques4ons
ECE 172A: Introduction to Intelligent Systems: Machine Vision, Fall Midterm Examination
 ECE 172A: Introduction to Intelligent Systems: Machine Vision, Fall 2008 October 29, 2008 Notes: Midterm Examination This is a closed book and closed notes examination. Please be precise and to the point.
ECE 172A: Introduction to Intelligent Systems: Machine Vision, Fall 2008 October 29, 2008 Notes: Midterm Examination This is a closed book and closed notes examination. Please be precise and to the point.
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
White Paper: VANTIQ Digital Twin Architecture
 Vantiq White Paper www.vantiq.com White Paper: VANTIQ Digital Twin Architecture By Paul Butterworth November 2017 TABLE OF CONTENTS Introduction... 3 Digital Twins... 3 Definition... 3 Examples... 5 Logical
Vantiq White Paper www.vantiq.com White Paper: VANTIQ Digital Twin Architecture By Paul Butterworth November 2017 TABLE OF CONTENTS Introduction... 3 Digital Twins... 3 Definition... 3 Examples... 5 Logical
Spatio-Temporal Road Detection from Aerial Imagery using CNNs
 Spatio-Temporal Road Detection from Aerial Imagery using CNNs Belén Luque 1, Josep Ramon Morros 2, Javier Ruiz-Hidalgo 3 Signal Theory and Communications Department Universitat Politècnica de Catalunya
Spatio-Temporal Road Detection from Aerial Imagery using CNNs Belén Luque 1, Josep Ramon Morros 2, Javier Ruiz-Hidalgo 3 Signal Theory and Communications Department Universitat Politècnica de Catalunya
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond
 High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
Semi-Automatic Road Extraction Algorithm from IKONOS Images Using Template Matching
 Semi-Automatic Road Extraction Algorithm from IKONOS Images Using Template Matching Seung-Ran Park, Taejung Kim Satellite Technology Research Center, KAIST, 373-1, Yusung-gu, Taejon, 305-701, ROK Tel :
Semi-Automatic Road Extraction Algorithm from IKONOS Images Using Template Matching Seung-Ran Park, Taejung Kim Satellite Technology Research Center, KAIST, 373-1, Yusung-gu, Taejon, 305-701, ROK Tel :
Automated Driving Development
 Automated Driving Development with MATLAB and Simulink MANOHAR REDDY M 2015 The MathWorks, Inc. 1 Using Model-Based Design to develop high quality and reliable Active Safety & Automated Driving Systems
Automated Driving Development with MATLAB and Simulink MANOHAR REDDY M 2015 The MathWorks, Inc. 1 Using Model-Based Design to develop high quality and reliable Active Safety & Automated Driving Systems
Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving
 Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving Shmoolik Mangan, PhD Algorithms Development Manager, VAYAVISION AutonomousTech TLV Israel 2018 VAYAVISION s approach
Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving Shmoolik Mangan, PhD Algorithms Development Manager, VAYAVISION AutonomousTech TLV Israel 2018 VAYAVISION s approach
Transforming Transport Infrastructure with GPU- Accelerated Machine Learning Yang Lu and Shaun Howell
 Transforming Transport Infrastructure with GPU- Accelerated Machine Learning Yang Lu and Shaun Howell 11 th Oct 2018 2 Contents Our Vision Of Smarter Transport Company introduction and journey so far Advanced
Transforming Transport Infrastructure with GPU- Accelerated Machine Learning Yang Lu and Shaun Howell 11 th Oct 2018 2 Contents Our Vision Of Smarter Transport Company introduction and journey so far Advanced
REINFORCEMENT LEARNING: MDP APPLIED TO AUTONOMOUS NAVIGATION
 REINFORCEMENT LEARNING: MDP APPLIED TO AUTONOMOUS NAVIGATION ABSTRACT Mark A. Mueller Georgia Institute of Technology, Computer Science, Atlanta, GA USA The problem of autonomous vehicle navigation between
REINFORCEMENT LEARNING: MDP APPLIED TO AUTONOMOUS NAVIGATION ABSTRACT Mark A. Mueller Georgia Institute of Technology, Computer Science, Atlanta, GA USA The problem of autonomous vehicle navigation between
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE. Dennis Lui August 2017
 DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE Dennis Lui August 2017 THE RISE OF GPU COMPUTING APPLICATIONS 10 7 10 6 GPU-Computing perf 1.5X per year 1000X by 2025 ALGORITHMS 10 5 1.1X
DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE Dennis Lui August 2017 THE RISE OF GPU COMPUTING APPLICATIONS 10 7 10 6 GPU-Computing perf 1.5X per year 1000X by 2025 ALGORITHMS 10 5 1.1X
arxiv: v2 [cs.cv] 3 Apr 2017
![arxiv: v2 [cs.cv] 3 Apr 2017](/thumbs/80/80475299.jpg "arxiv: v2 [cs.cv] 3 Apr 2017") LIAR-based riving Path Generation Using Fully Convolutional Neural Networks Luca Caltagirone, Mauro Bellone, Lennart Svensson, Mattias ahde arxiv:1703.097v2 [cs.cv] 3 Apr 2017 Abstract In this work, a
LIAR-based riving Path Generation Using Fully Convolutional Neural Networks Luca Caltagirone, Mauro Bellone, Lennart Svensson, Mattias ahde arxiv:1703.097v2 [cs.cv] 3 Apr 2017 Abstract In this work, a
Fast Vehicle Detection and Counting Using Background Subtraction Technique and Prewitt Edge Detection
 International Journal of Computer Science and Telecommunications [Volume 6, Issue 10, November 2015] 8 ISSN 2047-3338 Fast Vehicle Detection and Counting Using Background Subtraction Technique and Prewitt
International Journal of Computer Science and Telecommunications [Volume 6, Issue 10, November 2015] 8 ISSN 2047-3338 Fast Vehicle Detection and Counting Using Background Subtraction Technique and Prewitt
Bidirectional Recurrent Convolutional Networks for Video Super-Resolution
 Bidirectional Recurrent Convolutional Networks for Video Super-Resolution Qi Zhang & Yan Huang Center for Research on Intelligent Perception and Computing (CRIPAC) National Laboratory of Pattern Recognition
Bidirectional Recurrent Convolutional Networks for Video Super-Resolution Qi Zhang & Yan Huang Center for Research on Intelligent Perception and Computing (CRIPAC) National Laboratory of Pattern Recognition
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION
 COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs
 Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs Raymond Ptucha, Rochester Institute of Technology, USA Tutorial-9 May 19, 218 www.nvidia.com/dli R. Ptucha 18 1 Fair Use Agreement
Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs Raymond Ptucha, Rochester Institute of Technology, USA Tutorial-9 May 19, 218 www.nvidia.com/dli R. Ptucha 18 1 Fair Use Agreement
Realtime Object Detection and Segmentation for HD Mapping
 Realtime Object Detection and Segmentation for HD Mapping William Raveane Lead AI Engineer Bahram Yoosefizonooz Technical Director NavInfo Europe Advanced Research Lab Presented at GTC Europe 2018 AI in
Realtime Object Detection and Segmentation for HD Mapping William Raveane Lead AI Engineer Bahram Yoosefizonooz Technical Director NavInfo Europe Advanced Research Lab Presented at GTC Europe 2018 AI in
Complex Sensors: Cameras, Visual Sensing. The Robotics Primer (Ch. 9) ECE 497: Introduction to Mobile Robotics -Visual Sensors
 ECE 497: Introduction to Mobile Robotics -Visual Sensors") Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Object Detection in a Fixed Frame
 Object Detection in a Fixed Frame Debjyoti Bagchi 1, Dipaneeta Roy Chowdhury 2 and Satarupa Das 2 1 Assistant Professor, Calcutta Institute Of Engineering And Management Kolkata, India, 2 Calcutta Institute
Object Detection in a Fixed Frame Debjyoti Bagchi 1, Dipaneeta Roy Chowdhury 2 and Satarupa Das 2 1 Assistant Professor, Calcutta Institute Of Engineering And Management Kolkata, India, 2 Calcutta Institute
Practical Camera Auto-Calibration Based on Object Appearance and Motion for Traffic Scene Visual Surveillance
 Practical Camera Auto-Calibration Based on Object Appearance and Motion for Traffic Scene Visual Surveillance Zhaoxiang Zhang, Min Li, Kaiqi Huang and Tieniu Tan National Laboratory of Pattern Recognition,
Practical Camera Auto-Calibration Based on Object Appearance and Motion for Traffic Scene Visual Surveillance Zhaoxiang Zhang, Min Li, Kaiqi Huang and Tieniu Tan National Laboratory of Pattern Recognition,
Non-flat Road Detection Based on A Local Descriptor
 Non-flat Road Detection Based on A Local Descriptor Kangru Wang, Lei Qu, Lili Chen, Yuzhang Gu, Xiaolin Zhang Abstrct The detection of road surface and free space remains challenging for non-flat plane,
Non-flat Road Detection Based on A Local Descriptor Kangru Wang, Lei Qu, Lili Chen, Yuzhang Gu, Xiaolin Zhang Abstrct The detection of road surface and free space remains challenging for non-flat plane,
Chapter 9 Object Tracking an Overview
 Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach
 Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
arxiv: v1 [cs.cv] 27 Mar 2019
![arxiv: v1 [cs.cv] 27 Mar 2019](/thumbs/96/129261901.jpg "arxiv: v1 [cs.cv] 27 Mar 2019") Learning 2D to 3D Lifting for Object Detection in 3D for Autonomous Vehicles Siddharth Srivastava 1, Frederic Jurie 2 and Gaurav Sharma 3 arxiv:1904.08494v1 [cs.cv] 27 Mar 2019 Abstract We address the
Learning 2D to 3D Lifting for Object Detection in 3D for Autonomous Vehicles Siddharth Srivastava 1, Frederic Jurie 2 and Gaurav Sharma 3 arxiv:1904.08494v1 [cs.cv] 27 Mar 2019 Abstract We address the
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation
 Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
S7348: Deep Learning in Ford's Autonomous Vehicles. Bryan Goodman Argo AI 9 May 2017
 S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
Video Processing on Vehicle Front-View Camera
 Video Processing on Vehicle Front-View Camera EE368: Digital Image Processing Final Project Yaqi Zhang Department of Electrical Engineering Stanford University Stanford, California 94305 Email: yaqiz@stanford.edu
Video Processing on Vehicle Front-View Camera EE368: Digital Image Processing Final Project Yaqi Zhang Department of Electrical Engineering Stanford University Stanford, California 94305 Email: yaqiz@stanford.edu
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
3D LIDAR Point Cloud based Intersection Recognition for Autonomous Driving
 3D LIDAR Point Cloud based Intersection Recognition for Autonomous Driving Quanwen Zhu, Long Chen, Qingquan Li, Ming Li, Andreas Nüchter and Jian Wang Abstract Finding road intersections in advance is
3D LIDAR Point Cloud based Intersection Recognition for Autonomous Driving Quanwen Zhu, Long Chen, Qingquan Li, Ming Li, Andreas Nüchter and Jian Wang Abstract Finding road intersections in advance is
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601
 with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601") Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
Solid-State Hybrid LiDAR for Autonomous Driving Product Description
 Solid-State Hybrid LiDAR for Autonomous Driving Product Description What is LiDAR Sensor Who is Using LiDARs How does LiDAR Work Hesai LiDAR Demo Features Terminologies Specifications What is LiDAR A LiDAR
Solid-State Hybrid LiDAR for Autonomous Driving Product Description What is LiDAR Sensor Who is Using LiDARs How does LiDAR Work Hesai LiDAR Demo Features Terminologies Specifications What is LiDAR A LiDAR
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical