Self-Collision Detection and Prevention for Humanoid Robots. Talk Overview
|
|
|
- Domenic Caldwell
- 5 years ago
- Views:
Transcription



1 Self-Collision Detection and Prevention for Humanoid Robots James Kuffner, Jr. Carnegie Mellon University Koichi Nishiwaki The University of Tokyo Satoshi Kagami Digital Human Lab (AIST) Masayuki Inaba Hirochika Inoue The University of Tokyo Talk Overview Self-Collision Detection Feature-based Minimum Distance Computation: Approximate Geometric Models Minimum Distances for 3D Convex Polyhedral Models Coherency and Efficiency Safe Biped Walking Experimental Results Conclusion & Future Work


 H6 [ Nagasaka,,")

![Kagami, Inaba,, Inoue ] [](/docs-images/90/102004601/images/2-4.jpg "Nishiwaki,, Sugihara,")
2 JSK Humanoid Research Platforms H5 (30 DOF ; 33kg ; 1.27m ) H6 (35 DOF ; 55kg ; 1.37m ) H6 [ Nagasaka,, Konno, Nishiwaki,, Kitagawa, Sugihara, Kagami, Inaba,, Inoue ] [ Nishiwaki,, Sugihara, Kagami, Kanehiro, Inaba,, Inoue ] Humanoid H
![Balance Compensation as an Optimization Problem AutoBalancer: : online dynamics filter [Kagami, Kanehiro, Tamiya, Inaba,, Inoue : WAFR 2000]](/docs-images/90/102004601/images/3-0.jpg "p = δθcmd + δθret δθcomp E comp ) = w i i= 1 δ θ + ( δθ ( δθ 2 comp, i ) Dynamic Stability Criteria Static stability: δcx ( δθ) = 0 δc ( δθ)")
 < d F < M ( δ θ < d y y, 2 x, 1 y ) x, 2 µ F < M z ( δ θ ) < µ F F F Ideal Centroid Projection foot d F y,1 M x d z y,2 x y")
3 Balance Compensation as an Optimization Problem AutoBalancer: : online dynamics filter [Kagami, Kanehiro, Tamiya, Inaba,, Inoue : WAFR 2000] p = δθcmd + δθret δθcomp E comp ) = w i i= 1 δ θ + ( δθ ( δθ 2 comp, i ) Dynamic Stability Criteria Static stability: δcx ( δθ) = 0 δc ( δθ) = 0 y C = X(θ) C& = J(θ) θ& X(θ) J(θ) = θ ( t) δ C = J(θ) δθ Dynamic stability: Moment of Inertia Contstraints Zero Moment Point (ZMP) d d, 1F < M x ( δ θ ) < d F < M ( δ θ < d y y, 2 x, 1 y ) x, 2 µ F < M z ( δ θ ) < µ F F F Ideal Centroid Projection foot d F y,1 M x d z y,2 x y
 Reliable (computation time has low variance) Numerically")
4 Virtual Puppet Interface Online Walking Trajectory Generation Even without obstacles, balance criteria alone cannot guarantee safe motion! Need methods for detecting and preventing leg interference and body self-collision Efficient (low computation time) Reliable (computation time has low variance) Numerically robust Should be conservative (error-bounds)
5 Self-Collision Occurs when one of more of the links of a robot collide Dangers of self-collision: Can cause robot to damage itself Through a loss of balance or control, can cause damage to the surrounding environment (including nearby people) Detecting and preventing potential self- collisions is fundamental to developing safe robots IDEAL: Safe Biped Walking A colliding posture is never output by the controller, thus all trajectories executed by the robot are guaranteed to be free of self-collision CURRENT: All computed desired body trajectories are free of self-collision (prior to online balance compensation and PD control) Depends on the accuracy of both the kinematic and dynamic model of the robot and environment


![pre-computed [Kanehiro, Hirukawa 01]](/docs-images/90/102004601/images/6-2.jpg "Approximating Link Geometry Full CAD")
 Bounding")
6 Our Approach Maintain closest points between pairs of links All pairs can be considered, or a subset of possibly-colliding pairs can be pre-computed [Kanehiro, Hirukawa 01] Approximating Link Geometry Full CAD Model ( 314,588 triangles ) Convex Hulls ( 2,702 triangles ) Bounding Boxes ( 432 triangles )


 ( N 1) = 2 N 2")
7 Protective Convex Hulls CAD model Protective Hull Combined View Self-Collision Detection GIVEN: Tree-like kinematic structure with N links: ASSUME: joint limits specified to prevent collisions between adjacent links. Remaining pairs to check: N( N 1) ( N 1) = 2 N 2 3N links = 454 pairs
![Minimum Distance Computation CONVEX POLYHEDRA: GJK [Gilbert, Johnson, Keerthi 88] Lin-Canny [Lin, Canny 91] Enhanced-GJK [Cameron 97] V-Clip [Mirtich 98] H-walk [Guibas,, Hsu, Zhang 99] NON-CONVEX](/docs-images/90/102004601/images/8-0.jpg "POLYHEDRA: Sphere Trees [Quinlan 94] CFL [Kawachi,, Suzuki 00] SWIFT++ : [Ehmann Ehmann,, Lin 01] Feature-based Minimum Distance Computation ADVANTAGES: Exploits spatial and temporal coherency")
8 Minimum Distance Computation CONVEX POLYHEDRA: GJK [Gilbert, Johnson, Keerthi 88] Lin-Canny [Lin, Canny 91] Enhanced-GJK [Cameron 97] V-Clip [Mirtich 98] H-walk [Guibas,, Hsu, Zhang 99] NON-CONVEX POLYHEDRA: Sphere Trees [Quinlan 94] CFL [Kawachi,, Suzuki 00] SWIFT++ : [Ehmann Ehmann,, Lin 01] Feature-based Minimum Distance Computation ADVANTAGES: Exploits spatial and temporal coherency Minimum distance value and pairs of closest feature points can be updated in almost constant time No performance loss for near-colliding cases DISADVANTAGES: Typically limited only to closed, bounded, convex polyhedra (or hierarchical collections of them)
9 Voronoi-based Minimum Distances feature hyperplanes Polyhedra B Voronoi region v for edge e 2 e v 1 Polyhedra A f 2 f 1 Voronoi-based Minimum Distances Dual-containment validates closest features Polyhedra B Voronoi region for vertex v v 2 v e v 1 Polyhedra A f 2 f 1
10 Voronoi-based Minimum Distances POSSIBLE STATES: Vertex Vertex (V-V) V) Vertex Edge (V-E) Vertex Face (V-F) Edge Edge (E-E) E) Edge Face (E-F) Algorithm keeps track of possible transitions between states Coherency and Efficiency Closest feature pairs cached from previous computation: Subsequent checks verify Voronoi containment constraints



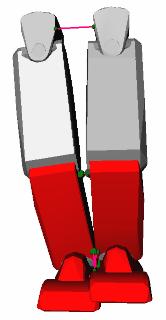



11 Example 1 : In-Place Stepping In-Place & Forward-Turning Step 14 links w/ 14 DOF Select = 19 active pairs Full = 73 active pairs 866 MHz dual Pentium III Time per config = ms Time per config = ms


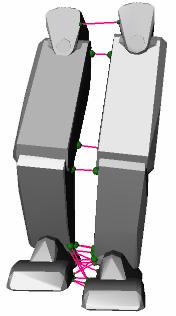
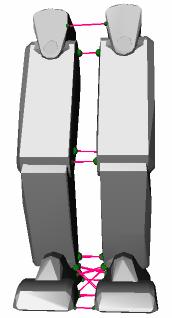
12 Whole-Body Self-Collision Detection 31 links w/ 30 DOF 76 active pairs 866 MHz dual Pentium III Time per config = 0.44 ms Whole-Body Self-Collision Detection 31 links w/ 30 DOF Select = 76 active pairs Full = 425 active pairs 866 MHz dual Pentium III Time per config = 0.44 ms Time per config = 2.44 ms
 PD servo 1 msec (1000 Hz) FIFO Queue")
13 Onboard computer running joystick server, collision checker & trajectory generator HUMAN OPERATOR Joystick Client WIRELESS NETWORK USER LAYER KERNEL LAYER (RT-Linux) Online Collision Checker Walking Trajectory Sequence Manager Online Balance Compensator desired trajectory desired joint angles Joystick Server Online Walking Trajectory Generator (3-step EST) PD servo 1 msec (1000 Hz) FIFO Queue Communication Trajectory Generation 65 samples, 50 ms spacing ( msec) gyro data 6-axis FS joint angles Robot I/O Board (RIF-01 x 2) motor torque Collision Check (10mm tol) including joint position and joint velocity limit check (10-30 msec) ROBOT HARDWARE (motors, encoders, gyro, inclinometer, force sensors)

14 INITIAL POSTURE 3-step Trajectory Time (1 step = 1 second) Always maintains 3-step Emergency Stopping Trajectory Joystick Command Cycle DURING EACH CYCLE: Read joystick command Calculate new 3-step trajectory Check new trajectory for self-collision 3 4 Collision Detected FINAL POSTURE 6 7 Safe Online Joystick Control Self-collision check 3 steps in the future ( configurations) Minimum Distance Configuration
 Balance and obstacle constraints restrict space of feasible configurations INITIAL C-space GOAL: Compute a trajectory that: Connects the initial and")
15 Other Applications : Motion Planning High-dim. C-space C (30 DOF) Balance and obstacle constraints restrict space of feasible configurations INITIAL C-space GOAL: Compute a trajectory that: Connects the initial and final posture Collision-free (including self-collision) Dynamically-stable FINAL Single-leg leg Example Initial Pose Goal Pose


16 Single-leg leg Example Single-leg leg Example



17 Dual-leg leg Example Initial Pose Goal Pose Dual-leg leg Example


18 Dual-leg leg Example Summary Efficient approach to self- collision detection using: Polyhedral convex protective hulls Fast feature-based minimum distance determination algorithms Implemented & tested concurrently with online joystick control Reliable and reusable software is fundamental to improving robot functionality and autonomy Simulation systems for humanoid robots help reduce costs and safety-risks during testing

19 Future Work Bring Self-collision testing closer to the servo control layer Extend method to handle non-convex polyhedral models Optimize the number of distance calculations using maximum joint velocity bounds Can be used to prevent collisions between environment obstacles of known geometry Applications in multi-robot coordination and computer animation of articulated figures Robodex 2003 : April 7,, 2003 The birthday of AstroBoy


20 Robodex 2003 Honda s new Silver ASIMO Robodex 2003 Sony Dream Robot (SDR-4X)


21 Robodex 2003 AIST Japan s HRP2 Robodex 2003 AIST Japan s HRP2
Self-Collision Detection. Planning for Humanoid Robots. Digital Human Research Center. Talk Overview
 Self-Collision Detection and Motion Planning for Humanoid Robots James Kuffner (CMU & AIST Japan) Digital Human Research Center Self-Collision Detection Feature-based Minimum Distance Computation: Approximate
Self-Collision Detection and Motion Planning for Humanoid Robots James Kuffner (CMU & AIST Japan) Digital Human Research Center Self-Collision Detection Feature-based Minimum Distance Computation: Approximate
James Kuffner. The Robotics Institute Carnegie Mellon University. Digital Human Research Center (AIST) James Kuffner (CMU/Google)
 James Kuffner (CMU/Google)") James Kuffner The Robotics Institute Carnegie Mellon University Digital Human Research Center (AIST) 1 Stanford University 1995-1999 University of Tokyo JSK Lab 1999-2001 Carnegie Mellon University The
James Kuffner The Robotics Institute Carnegie Mellon University Digital Human Research Center (AIST) 1 Stanford University 1995-1999 University of Tokyo JSK Lab 1999-2001 Carnegie Mellon University The
Online Generation of Humanoid Walking Motion based on a Fast. The University of Tokyo, Tokyo, Japan,
 Online Generation of Humanoid Walking Motion based on a Fast Generation Method of Motion Pattern that Follows Desired ZMP Koichi Nishiwaki 1, Satoshi Kagami 2,Yasuo Kuniyoshi 1, Masayuki Inaba 1,Hirochika
Online Generation of Humanoid Walking Motion based on a Fast Generation Method of Motion Pattern that Follows Desired ZMP Koichi Nishiwaki 1, Satoshi Kagami 2,Yasuo Kuniyoshi 1, Masayuki Inaba 1,Hirochika
Leg Motion Primitives for a Humanoid Robot to Imitate Human Dances
 Leg Motion Primitives for a Humanoid Robot to Imitate Human Dances Shinichiro Nakaoka 1, Atsushi Nakazawa 2, Kazuhito Yokoi 3 and Katsushi Ikeuchi 1 1 The University of Tokyo,Tokyo, Japan (nakaoka@cvl.iis.u-tokyo.ac.jp)
Leg Motion Primitives for a Humanoid Robot to Imitate Human Dances Shinichiro Nakaoka 1, Atsushi Nakazawa 2, Kazuhito Yokoi 3 and Katsushi Ikeuchi 1 1 The University of Tokyo,Tokyo, Japan (nakaoka@cvl.iis.u-tokyo.ac.jp)
Generating Whole Body Motions for a Biped Humanoid Robot from Captured Human Dances
 Generating Whole Body Motions for a Biped Humanoid Robot from Captured Human Dances Shinichiro Nakaoka Atsushi Nakazawa Kazuhito Yokoi Hirohisa Hirukawa Katsushi Ikeuchi Institute of Industrial Science,
Generating Whole Body Motions for a Biped Humanoid Robot from Captured Human Dances Shinichiro Nakaoka Atsushi Nakazawa Kazuhito Yokoi Hirohisa Hirukawa Katsushi Ikeuchi Institute of Industrial Science,
Motion Planning for Whole Body Tasks by Humanoid Robots
 Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada July 5 Motion Planning for Whole Body Tasks by Humanoid Robots Eiichi Yoshida 1, Yisheng Guan 1, Neo
Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada July 5 Motion Planning for Whole Body Tasks by Humanoid Robots Eiichi Yoshida 1, Yisheng Guan 1, Neo
Humanoid Robotics. Path Planning and Walking. Maren Bennewitz
 Humanoid Robotics Path Planning and Walking Maren Bennewitz 1 Introduction Given the robot s pose in a model of the environment Compute a path to a target location First: 2D path in a 2D grid map representation
Humanoid Robotics Path Planning and Walking Maren Bennewitz 1 Introduction Given the robot s pose in a model of the environment Compute a path to a target location First: 2D path in a 2D grid map representation
Dynamically-Stable Motion Planning for Humanoid Robots
 Autonomous Robots 12, 105 118, 2002 c 2002 Kluwer Academic Publishers. Manufactured in The Netherlands. Dynamically-Stable Motion Planning for Humanoid Robots JAMES J. KUFFNER, JR. Robotics Institute,
Autonomous Robots 12, 105 118, 2002 c 2002 Kluwer Academic Publishers. Manufactured in The Netherlands. Dynamically-Stable Motion Planning for Humanoid Robots JAMES J. KUFFNER, JR. Robotics Institute,
Motion Planning for Humanoid Robots
 Motion Planning for Humanoid Robots Presented by: Li Yunzhen What is Humanoid Robots & its balance constraints? Human-like Robots A configuration q is statically-stable if the projection of mass center
Motion Planning for Humanoid Robots Presented by: Li Yunzhen What is Humanoid Robots & its balance constraints? Human-like Robots A configuration q is statically-stable if the projection of mass center
Dynamically-stable Motion Planning for Humanoid Robots
 Autonomous Robots vol. 12, No. 1, pp. 105--118. (Jan. 2002) Dynamically-stable Motion Planning for Humanoid Robots James J. Kuffner, Jr. Dept. of Mechano-Informatics, The University of Tokyo, 7-3-1 Hongo,
Autonomous Robots vol. 12, No. 1, pp. 105--118. (Jan. 2002) Dynamically-stable Motion Planning for Humanoid Robots James J. Kuffner, Jr. Dept. of Mechano-Informatics, The University of Tokyo, 7-3-1 Hongo,
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
A Local Collision Avoidance Method for Non-strictly Convex Polyhedra
 A Local Collision Avoidance Method for Non-strictly Convex Polyhedra Fumio Kanehiro, Florent Lamiraux, Oussama Kanoun, Eiichi Yoshida and Jean-Paul Laumond IS/AIST-ST2I/CNRS Joint Japanese-French Robotics
A Local Collision Avoidance Method for Non-strictly Convex Polyhedra Fumio Kanehiro, Florent Lamiraux, Oussama Kanoun, Eiichi Yoshida and Jean-Paul Laumond IS/AIST-ST2I/CNRS Joint Japanese-French Robotics
Integrating Dynamics into Motion Planning for Humanoid Robots
 Integrating Dynamics into Motion Planning for Humanoid Robots Fumio Kanehiro, Wael Suleiman, Florent Lamiraux, Eiichi Yoshida and Jean-Paul Laumond Abstract This paper proposes an whole body motion planning
Integrating Dynamics into Motion Planning for Humanoid Robots Fumio Kanehiro, Wael Suleiman, Florent Lamiraux, Eiichi Yoshida and Jean-Paul Laumond Abstract This paper proposes an whole body motion planning
Instant Prediction for Reactive Motions with Planning
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Instant Prediction for Reactive Motions with Planning Hisashi Sugiura, Herbert Janßen, and
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Instant Prediction for Reactive Motions with Planning Hisashi Sugiura, Herbert Janßen, and
Intuitive and Flexible User Interface for Creating Whole Body Motions of Biped Humanoid Robots
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Intuitive and Flexible User Interface for Creating Whole Body Motions of Biped Humanoid
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Intuitive and Flexible User Interface for Creating Whole Body Motions of Biped Humanoid
Sound and fast footstep planning for humanoid robots
 Sound and fast footstep planning for humanoid robots Nicolas Perrin, Olivier Stasse, Léo Baudouin, Florent Lamiraux, Eiichi Yoshida Abstract In this paper we present some concepts for sound and fast footstep
Sound and fast footstep planning for humanoid robots Nicolas Perrin, Olivier Stasse, Léo Baudouin, Florent Lamiraux, Eiichi Yoshida Abstract In this paper we present some concepts for sound and fast footstep
Adaptive Motion Control: Dynamic Kick for a Humanoid Robot
 Adaptive Motion Control: Dynamic Kick for a Humanoid Robot Yuan Xu and Heinrich Mellmann Institut für Informatik, LFG Künstliche Intelligenz Humboldt-Universität zu Berlin, Germany {xu,mellmann}@informatik.hu-berlin.de
Adaptive Motion Control: Dynamic Kick for a Humanoid Robot Yuan Xu and Heinrich Mellmann Institut für Informatik, LFG Künstliche Intelligenz Humboldt-Universität zu Berlin, Germany {xu,mellmann}@informatik.hu-berlin.de
CS 231. Control for articulate rigid-body dynamic simulation. Articulated rigid-body dynamics
 CS 231 Control for articulate rigid-body dynamic simulation Articulated rigid-body dynamics F = ma No control 1 No control Ragdoll effects, joint limits RT Speed: many sims at real-time rates on today
CS 231 Control for articulate rigid-body dynamic simulation Articulated rigid-body dynamics F = ma No control 1 No control Ragdoll effects, joint limits RT Speed: many sims at real-time rates on today
Simplified Walking: A New Way to Generate Flexible Biped Patterns
 1 Simplified Walking: A New Way to Generate Flexible Biped Patterns Jinsu Liu 1, Xiaoping Chen 1 and Manuela Veloso 2 1 Computer Science Department, University of Science and Technology of China, Hefei,
1 Simplified Walking: A New Way to Generate Flexible Biped Patterns Jinsu Liu 1, Xiaoping Chen 1 and Manuela Veloso 2 1 Computer Science Department, University of Science and Technology of China, Hefei,
Leg Motion Primitives for a Dancing Humanoid Robot
 Leg Motion Primitives for a Dancing Humanoid Robot Shinichiro Nakaoka, Atsushi Nakazawa, Kazuhito Yokoi and Katsushi Ikeuchi Institute of Industrial Science, The University of Tokyo 4-6-1 Komaba, Meguro-ku,
Leg Motion Primitives for a Dancing Humanoid Robot Shinichiro Nakaoka, Atsushi Nakazawa, Kazuhito Yokoi and Katsushi Ikeuchi Institute of Industrial Science, The University of Tokyo 4-6-1 Komaba, Meguro-ku,
Collision Detection. These slides are mainly from Ming Lin s course notes at UNC Chapel Hill
 Collision Detection These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Computer Animation ILE5030 Computer Animation and Special Effects 2 Haptic
Collision Detection These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Computer Animation ILE5030 Computer Animation and Special Effects 2 Haptic
Configuration Space of a Robot
 Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Real-time Replanning Using 3D Environment for Humanoid Robot
 Real-time Replanning Using 3D Environment for Humanoid Robot Léo Baudouin, Nicolas Perrin, Thomas Moulard, Florent Lamiraux LAAS-CNRS, Université de Toulouse 7, avenue du Colonel Roche 31077 Toulouse cedex
Real-time Replanning Using 3D Environment for Humanoid Robot Léo Baudouin, Nicolas Perrin, Thomas Moulard, Florent Lamiraux LAAS-CNRS, Université de Toulouse 7, avenue du Colonel Roche 31077 Toulouse cedex
A Walking Pattern Generator for Biped Robots on Uneven Terrains
 A Walking Pattern Generator for Biped Robots on Uneven Terrains Yu Zheng, Ming C. Lin, Dinesh Manocha Albertus Hendrawan Adiwahono, Chee-Meng Chew Abstract We present a new method to generate biped walking
A Walking Pattern Generator for Biped Robots on Uneven Terrains Yu Zheng, Ming C. Lin, Dinesh Manocha Albertus Hendrawan Adiwahono, Chee-Meng Chew Abstract We present a new method to generate biped walking
Critique for CS 448B: Topics in Modeling The Voronoi-clip Collision Detection Algorithm
 Critique for CS 448B: Topics in Modeling The Voronoi-clip Collision Detection Algorithm 1. Citation Richard Bragg March 3, 2000 Mirtich B. (1997) V-Clip: Fast and Robust Polyhedral Collision Detection.
Critique for CS 448B: Topics in Modeling The Voronoi-clip Collision Detection Algorithm 1. Citation Richard Bragg March 3, 2000 Mirtich B. (1997) V-Clip: Fast and Robust Polyhedral Collision Detection.
References. Additional lecture notes for 2/18/02.
 References Additional lecture notes for 2/18/02. I-COLLIDE: Interactive and Exact Collision Detection for Large-Scale Environments, by Cohen, Lin, Manocha & Ponamgi, Proc. of ACM Symposium on Interactive
References Additional lecture notes for 2/18/02. I-COLLIDE: Interactive and Exact Collision Detection for Large-Scale Environments, by Cohen, Lin, Manocha & Ponamgi, Proc. of ACM Symposium on Interactive
Accelerated Proximity Queries Between Convex Polyhedra By Multi-Level Voronoi Marching
 Accelerated Proximity Queries Between Convex Polyhedra By Multi-Level Voronoi Marching Stephen A. Ehmann Ming C. Lin Department of Computer Science University of North Carolina Chapel Hill, NC 27599-3175
Accelerated Proximity Queries Between Convex Polyhedra By Multi-Level Voronoi Marching Stephen A. Ehmann Ming C. Lin Department of Computer Science University of North Carolina Chapel Hill, NC 27599-3175
Distance and Collision Detection
 Distance and Collision Detection Efi Fogel efif@post.tau.ac.il School of computer science, Tel Aviv University Fall 2003/4 Motion Planning seminar 1/33 The Papers A Fast Procedure for Computing the Distance
Distance and Collision Detection Efi Fogel efif@post.tau.ac.il School of computer science, Tel Aviv University Fall 2003/4 Motion Planning seminar 1/33 The Papers A Fast Procedure for Computing the Distance
Upper Body Joints Control for the Quasi static Stabilization of a Small-Size Humanoid Robot
 Upper Body Joints Control for the Quasi static Stabilization of a Small-Size Humanoid Robot Andrea Manni, Angelo di Noi and Giovanni Indiveri Dipartimento Ingegneria dell Innovazione, Università di Lecce
Upper Body Joints Control for the Quasi static Stabilization of a Small-Size Humanoid Robot Andrea Manni, Angelo di Noi and Giovanni Indiveri Dipartimento Ingegneria dell Innovazione, Università di Lecce
Fast foot prints re-planning and motion generation during walking in physical human-humanoid interaction
 Fast foot prints re-planning and motion generation during walking in physical human-humanoid interaction Olivier Stasse, Paul Evrard, Nicolas Perrin, Nicolas Mansard, Abderrahmane Kheddar Abstract In this
Fast foot prints re-planning and motion generation during walking in physical human-humanoid interaction Olivier Stasse, Paul Evrard, Nicolas Perrin, Nicolas Mansard, Abderrahmane Kheddar Abstract In this
Development of Vision System on Humanoid Robot HRP-2
 Development of Vision System on Humanoid Robot HRP-2 Yutaro Fukase Institute of Technology, Shimizu Corporation, Japan fukase@shimz.co.jp Junichiro Maeda Institute of Technology, Shimizu Corporation, Japan
Development of Vision System on Humanoid Robot HRP-2 Yutaro Fukase Institute of Technology, Shimizu Corporation, Japan fukase@shimz.co.jp Junichiro Maeda Institute of Technology, Shimizu Corporation, Japan
Interaction Mesh Based Motion Adaptation for Biped Humanoid Robots
 Interaction Mesh Based Motion Adaptation for Biped Humanoid Robots Shin ichiro Nakaoka 12 and Taku Komura 1 Abstract Adapting human motion data for humanoid robots can be an efficient way to let them conduct
Interaction Mesh Based Motion Adaptation for Biped Humanoid Robots Shin ichiro Nakaoka 12 and Taku Komura 1 Abstract Adapting human motion data for humanoid robots can be an efficient way to let them conduct
Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots
 15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
Coordinated Motion Planning for 3D Animation With Use of a Chinese Lion Dance as an Example
 Coordinated Motion Planning for 3D Animation With Use of a Chinese Lion Dance as an Example Fu-Sheng Yu and Tsai-Yen Li Computer Science Department, National Chengchi University, Taiwan, g9331@cs.nccu.edu.tw
Coordinated Motion Planning for 3D Animation With Use of a Chinese Lion Dance as an Example Fu-Sheng Yu and Tsai-Yen Li Computer Science Department, National Chengchi University, Taiwan, g9331@cs.nccu.edu.tw
Humanoid Teleoperation for Whole Body Manipulation
 Humanoid Teleoperation for Whole Body Manipulation Mike Stilman, Koichi Nishiwaki and Satoshi Kagami Abstract We present results of successful telemanipulation of large, heavy objects by a humanoid robot.
Humanoid Teleoperation for Whole Body Manipulation Mike Stilman, Koichi Nishiwaki and Satoshi Kagami Abstract We present results of successful telemanipulation of large, heavy objects by a humanoid robot.
Dynamically Stepping Over Obstacles by the Humanoid Robot HRP-2
 Dynamically Stepping Over Obstacles by the Humanoid Robot HRP-2 Björn Verrelst, Olivier Stasse, Kazuhito Yokoi Bram Vanderborght Joint Japanese-French Robotics Laboratory (JRL) Robotics & Multibody Mechanics
Dynamically Stepping Over Obstacles by the Humanoid Robot HRP-2 Björn Verrelst, Olivier Stasse, Kazuhito Yokoi Bram Vanderborght Joint Japanese-French Robotics Laboratory (JRL) Robotics & Multibody Mechanics
Integrating Grasp Planning and Visual Feedback for Reliable Manipulation
 9th IEEE-RAS International Conference on Humanoid Robots December 7-0, 2009 Paris, France Integrating Grasp Planning and Visual Feedback for Reliable Manipulation Rosen Diankov Takeo Kanade James Kuffner
9th IEEE-RAS International Conference on Humanoid Robots December 7-0, 2009 Paris, France Integrating Grasp Planning and Visual Feedback for Reliable Manipulation Rosen Diankov Takeo Kanade James Kuffner
Six-Degree-of-Freedom Haptic Rendering Using Incremental and Localized Computations
 Six-Degree-of-Freedom Haptic Rendering Using Incremental and Localized Computations Young J. Kim Miguel A. Otaduy Ming C. Lin Dinesh Manocha Department of Computer Science University of North Carolina
Six-Degree-of-Freedom Haptic Rendering Using Incremental and Localized Computations Young J. Kim Miguel A. Otaduy Ming C. Lin Dinesh Manocha Department of Computer Science University of North Carolina
A CONTROL ARCHITECTURE FOR DYNAMICALLY STABLE GAITS OF SMALL SIZE HUMANOID ROBOTS. Andrea Manni,1, Angelo di Noi and Giovanni Indiveri
 A CONTROL ARCHITECTURE FOR DYNAMICALLY STABLE GAITS OF SMALL SIZE HUMANOID ROBOTS Andrea Manni,, Angelo di Noi and Giovanni Indiveri Dipartimento di Ingegneria dell Innovazione, Università di Lecce, via
A CONTROL ARCHITECTURE FOR DYNAMICALLY STABLE GAITS OF SMALL SIZE HUMANOID ROBOTS Andrea Manni,, Angelo di Noi and Giovanni Indiveri Dipartimento di Ingegneria dell Innovazione, Università di Lecce, via
Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm Yuji
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm Yuji
Evolutionary Motion Design for Humanoid Robots
 Evolutionary Motion Design for Humanoid Robots Toshihiko Yanase Department of Frontier Informatics The University of Tokyo Chiba 277-8561, Japan yanase@iba.k.u-tokyo.ac.jp Hitoshi Iba Department of Frontier
Evolutionary Motion Design for Humanoid Robots Toshihiko Yanase Department of Frontier Informatics The University of Tokyo Chiba 277-8561, Japan yanase@iba.k.u-tokyo.ac.jp Hitoshi Iba Department of Frontier
Experimental Evaluation of the Dynamic Simulation of Biped Walking of Humanoid Robots
 Proceedings of the 2003 IEEE International Conference on Robotics & Automation Taipei, Taiwan, September 14-19, 2003 Experimental Evaluation of the Dynamic Simulation of Biped Walking of Humanoid Robots
Proceedings of the 2003 IEEE International Conference on Robotics & Automation Taipei, Taiwan, September 14-19, 2003 Experimental Evaluation of the Dynamic Simulation of Biped Walking of Humanoid Robots
An Efficient Method for Composing Whole Body Motions of a Humanoid Robot
 An Efficient Method for Composing Whole Body Motions of a Humanoid Robot Shinichiro NAKAOKA Atsushi NAKAZAWA Katsushi IKEUCHI Institute of Industrial Science, The University of Tokyo {nakaoka, ki}@cvl.iis.u-tokyo.ac.jp
An Efficient Method for Composing Whole Body Motions of a Humanoid Robot Shinichiro NAKAOKA Atsushi NAKAZAWA Katsushi IKEUCHI Institute of Industrial Science, The University of Tokyo {nakaoka, ki}@cvl.iis.u-tokyo.ac.jp
Learning Footstep Prediction from Motion. capture
 Learning Footstep Prediction from Motion Capture Andreas Schmitz, Marcell Missura, and Sven Behnke University of Bonn, Computer Science VI, Autonomous Intelligent Systems Roemerstr. 164, 53117 Bonn, Germany
Learning Footstep Prediction from Motion Capture Andreas Schmitz, Marcell Missura, and Sven Behnke University of Bonn, Computer Science VI, Autonomous Intelligent Systems Roemerstr. 164, 53117 Bonn, Germany
Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
 CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
Tracking Minimum Distances between Curved Objects with Parametric Surfaces in Real Time
 Tracking Minimum Distances between Curved Objects with Parametric Surfaces in Real Time Zhihua Zou, Jing Xiao Department of Computer Science University of North Carolina Charlotte zzou28@yahoo.com, xiao@uncc.edu
Tracking Minimum Distances between Curved Objects with Parametric Surfaces in Real Time Zhihua Zou, Jing Xiao Department of Computer Science University of North Carolina Charlotte zzou28@yahoo.com, xiao@uncc.edu
Distributed Real-Time Processing for Humanoid Robots
 Distributed Real-Time Processing for Humanoid Robots Toshihiro Matsui *1, Hirohisa Hirukawa *2, Yutaka Ishikawa *3, Nobuyuki Yamasaki *4 Satoshi Kagami *1, Fumio Kanehiro *2, Hajime Saito *2, Tetsuya Inamura
Distributed Real-Time Processing for Humanoid Robots Toshihiro Matsui *1, Hirohisa Hirukawa *2, Yutaka Ishikawa *3, Nobuyuki Yamasaki *4 Satoshi Kagami *1, Fumio Kanehiro *2, Hajime Saito *2, Tetsuya Inamura
A Different Approach for Continuous Physics. Vincent ROBERT Physics Programmer at Ubisoft
 A Different Approach for Continuous Physics Vincent ROBERT vincent.robert@ubisoft.com Physics Programmer at Ubisoft A Different Approach for Continuous Physics Existing approaches Our method Limitations
A Different Approach for Continuous Physics Vincent ROBERT vincent.robert@ubisoft.com Physics Programmer at Ubisoft A Different Approach for Continuous Physics Existing approaches Our method Limitations
Simultaneous Tracking and Balancing of Humanoid Robots for Imitating Human Motion Capture Data
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Simultaneous Tracking and Balancing of Humanoid Robots for Imitating Human Motion Capture
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Simultaneous Tracking and Balancing of Humanoid Robots for Imitating Human Motion Capture
SHORT PAPER Efficient reaching motion planning method for low-level autonomy of teleoperated humanoid robots
 Advanced Robotics, 214 Vol. 28, No. 7, 433 439, http://dx.doi.org/1.18/1691864.213.876931 SHORT PAPER Efficient reaching motion planning method for low-level autonomy of teleoperated humanoid robots Fumio
Advanced Robotics, 214 Vol. 28, No. 7, 433 439, http://dx.doi.org/1.18/1691864.213.876931 SHORT PAPER Efficient reaching motion planning method for low-level autonomy of teleoperated humanoid robots Fumio
Small-Space Controllability of a Walking Humanoid Robot
 Small-Space Controllability of a Walking Humanoid Robot Se bastien Dalibard, Antonio El Khoury, Florent Lamiraux, Michel Taı x, Jean-Paul Laumond hal-00602384, version 2-19 Sep 2011 CNRS ; LAAS ; 7 avenue
Small-Space Controllability of a Walking Humanoid Robot Se bastien Dalibard, Antonio El Khoury, Florent Lamiraux, Michel Taı x, Jean-Paul Laumond hal-00602384, version 2-19 Sep 2011 CNRS ; LAAS ; 7 avenue
Motion Planning of Emergency Stop for Humanoid Robot by State Space Approach
 Motion Planning of Emergency Stop for Humanoid Robot by State Space Approach Mitsuharu Morisawa, Kenji Kaneko, Fumio Kanehiro, Shuuji Kajita, Kiyoshi Fujiwara, Kensuke Harada, Hirohisa Hirukawa National
Motion Planning of Emergency Stop for Humanoid Robot by State Space Approach Mitsuharu Morisawa, Kenji Kaneko, Fumio Kanehiro, Shuuji Kajita, Kiyoshi Fujiwara, Kensuke Harada, Hirohisa Hirukawa National
Development of Production Environment for Motion Contents for Humans, Animals, and Other Structures
 UDC 621.397.3:681.32 Development of Production Environment for Motion Contents for Humans, Animals, and Other Structures VFumio Nagashima (Manuscript received June 17, 1999) This paper proposes an efficient
UDC 621.397.3:681.32 Development of Production Environment for Motion Contents for Humans, Animals, and Other Structures VFumio Nagashima (Manuscript received June 17, 1999) This paper proposes an efficient
Mobility of Humanoid Robots: Stepping over Large Obstacles Dynamically
 Mobility of Humanoid Robots: Stepping over Large Obstacles Dynamically Björn Verrelst, Kazuhito Yokoi, Olivier Stasse, and Hitoshi Arisumi Bram Vanderborght Joint Japanese-French Robotics Laboratory (JRL)
Mobility of Humanoid Robots: Stepping over Large Obstacles Dynamically Björn Verrelst, Kazuhito Yokoi, Olivier Stasse, and Hitoshi Arisumi Bram Vanderborght Joint Japanese-French Robotics Laboratory (JRL)
Last update: May 6, Robotics. CMSC 421: Chapter 25. CMSC 421: Chapter 25 1
 Last update: May 6, 2010 Robotics CMSC 421: Chapter 25 CMSC 421: Chapter 25 1 A machine to perform tasks What is a robot? Some level of autonomy and flexibility, in some type of environment Sensory-motor
Last update: May 6, 2010 Robotics CMSC 421: Chapter 25 CMSC 421: Chapter 25 1 A machine to perform tasks What is a robot? Some level of autonomy and flexibility, in some type of environment Sensory-motor
Motion Planning for Humanoid Robots: Highlights with HRP-2
 Motion Planning for Humanoid Robots: Highlights with HRP-2 Eiichi Yoshida 1,2 and Jean-Paul Laumond 2 AIST/IS-CNRS/ST2I Joint French-Japanese Robotics Laboratory (JRL) 1 Intelligent Systems Research Institute,
Motion Planning for Humanoid Robots: Highlights with HRP-2 Eiichi Yoshida 1,2 and Jean-Paul Laumond 2 AIST/IS-CNRS/ST2I Joint French-Japanese Robotics Laboratory (JRL) 1 Intelligent Systems Research Institute,
Online Gain Switching Algorithm for Joint Position Control of a Hydraulic Humanoid Robot
 Online Gain Switching Algorithm for Joint Position Control of a Hydraulic Humanoid Robot Jung-Yup Kim *, Christopher G. Atkeson *, Jessica K. Hodgins *, Darrin C. Bentivegna *,** and Sung Ju Cho * * Robotics
Online Gain Switching Algorithm for Joint Position Control of a Hydraulic Humanoid Robot Jung-Yup Kim *, Christopher G. Atkeson *, Jessica K. Hodgins *, Darrin C. Bentivegna *,** and Sung Ju Cho * * Robotics
A sliding walk method for humanoid robots using ZMP feedback control
 A sliding walk method for humanoid robots using MP feedback control Satoki Tsuichihara, Masanao Koeda, Seiji Sugiyama, and Tsuneo oshikawa Abstract In this paper, we propose two methods for a highly stable
A sliding walk method for humanoid robots using MP feedback control Satoki Tsuichihara, Masanao Koeda, Seiji Sugiyama, and Tsuneo oshikawa Abstract In this paper, we propose two methods for a highly stable
Controlling Humanoid Robots with Human Motion Data: Experimental Validation
 21 IEEE-RAS International Conference on Humanoid Robots Nashville, TN, USA, December 6-8, 21 Controlling Humanoid Robots with Human Motion Data: Experimental Validation Katsu Yamane, Stuart O. Anderson,
21 IEEE-RAS International Conference on Humanoid Robots Nashville, TN, USA, December 6-8, 21 Controlling Humanoid Robots with Human Motion Data: Experimental Validation Katsu Yamane, Stuart O. Anderson,
Real-time Continuous Collision Detection and Penetration Depth Computation
 Real-time Continuous Collision Detection and Penetration Depth Computation Young J. Kim http://graphics.ewha.ac.kr Ewha Womans University Non-penetration Constraint No overlap between geometric objects
Real-time Continuous Collision Detection and Penetration Depth Computation Young J. Kim http://graphics.ewha.ac.kr Ewha Womans University Non-penetration Constraint No overlap between geometric objects
Time-Optimal Path Parameterization for Critically Dynamic Motions of Humanoid Robots
 Time-Optimal Path Parameterization for Critically Dynamic Motions of Humanoid Robots Quang-Cuong Pham and Yoshihiko Nakamura Department of Mechano-Informatics University of Tokyo, Japan Abstract Planning
Time-Optimal Path Parameterization for Critically Dynamic Motions of Humanoid Robots Quang-Cuong Pham and Yoshihiko Nakamura Department of Mechano-Informatics University of Tokyo, Japan Abstract Planning
Collision Detection CS434. Daniel G. Aliaga Department of Computer Science Purdue University
 Collision Detection CS434 Daniel G. Aliaga Department of Computer Science Purdue University Some Applications Animations/games Robotic planning Haptics Some collision detection approaches Minkowski Sum
Collision Detection CS434 Daniel G. Aliaga Department of Computer Science Purdue University Some Applications Animations/games Robotic planning Haptics Some collision detection approaches Minkowski Sum
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Motion Planning of Ladder Climbing for Humanoid Robots
 Motion Planning of Ladder Climbing for Humanoid Robots Yajia Zhang, Jingru Luo, Kris Hauser School of Informatics & Computing Indiana University Bloomington, IN 47408 Robert Ellenberg, Paul Oh Mechanical
Motion Planning of Ladder Climbing for Humanoid Robots Yajia Zhang, Jingru Luo, Kris Hauser School of Informatics & Computing Indiana University Bloomington, IN 47408 Robert Ellenberg, Paul Oh Mechanical
XIAOYUN DENG ROBOT WORKCELL MODELLING AND COLLISION DETECTION WITH MATLAB ROBOTICS TOOLBOX Master of Science Thesis
 XIAOYUN DENG ROBOT WORKCELL MODELLING AND COLLISION DETECTION WITH MATLAB ROBOTICS TOOLBOX Master of Science Thesis Examiner: Professor Jose L. Martinez Lastra Examiner and topic approved in the Automation,
XIAOYUN DENG ROBOT WORKCELL MODELLING AND COLLISION DETECTION WITH MATLAB ROBOTICS TOOLBOX Master of Science Thesis Examiner: Professor Jose L. Martinez Lastra Examiner and topic approved in the Automation,
Inverse Kinematics for Humanoid Robots using Artificial Neural Networks
 Inverse Kinematics for Humanoid Robots using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
Inverse Kinematics for Humanoid Robots using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
Mobile Robot Path Planning: an Efficient Distance Computation between Obstacles using Discrete Boundary Model (DBM)
") Mobile Robot Path Planning: an Efficient Distance Computation between Obstacles using Discrete Boundary Model (DBM) Md. Nasir Uddin Laskar, TaeChoong Chung Artificial Intelligence Lab, Dept. of Computer
Mobile Robot Path Planning: an Efficient Distance Computation between Obstacles using Discrete Boundary Model (DBM) Md. Nasir Uddin Laskar, TaeChoong Chung Artificial Intelligence Lab, Dept. of Computer
PRISMA Lab. Napoli, 24 October 2008
 First workshop for young researchers on Human-friendly robotics Modelling and control for Human-Robot Interaction ti Agostino DE SANTIS PRISMA Lab Università degli Studi di Napoli Federico II agodesa@unina.it
First workshop for young researchers on Human-friendly robotics Modelling and control for Human-Robot Interaction ti Agostino DE SANTIS PRISMA Lab Università degli Studi di Napoli Federico II agodesa@unina.it
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Mobile Manipulator Design
 Mobile Manipulator Design December 10, 2007 Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University 1. Introduction This report provides a preliminary design for two mobile manipulators
Mobile Manipulator Design December 10, 2007 Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University 1. Introduction This report provides a preliminary design for two mobile manipulators
Non-Gaited Humanoid Locomotion Planning
 Non-Gaited Humanoid Locomotion Planning Kris Hauser, Tim Bretl, and Jean-Claude Latombe Stanford University Stanford, CA 94307, USA khauser@cs.stanford.edu, tbretl@stanford.edu, latombe@cs.stanford.edu
Non-Gaited Humanoid Locomotion Planning Kris Hauser, Tim Bretl, and Jean-Claude Latombe Stanford University Stanford, CA 94307, USA khauser@cs.stanford.edu, tbretl@stanford.edu, latombe@cs.stanford.edu
Coordinated Motion Planning for 3D Animation - With Use of a Chinese Lion Dance as an Example
 174 ECTI TRANSACTIONS ON ELECTRICAL ENG., ELECTRONICS, AND COMMUNICATIONS VOL.5, NO.2 August 2007 Coordinated Motion Planning for 3D Animation - With Use of a Chinese Lion Dance as an Example Fu-Sheng
174 ECTI TRANSACTIONS ON ELECTRICAL ENG., ELECTRONICS, AND COMMUNICATIONS VOL.5, NO.2 August 2007 Coordinated Motion Planning for 3D Animation - With Use of a Chinese Lion Dance as an Example Fu-Sheng
Inverse Kinematics for Humanoid Robots Using Artificial Neural Networks
 Inverse Kinematics for Humanoid Robots Using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
Inverse Kinematics for Humanoid Robots Using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Motion Planning 1 Retraction and Cell Decomposition
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Planning and Executing Navigation Among Movable Obstacles
 Planning and Executing Navigation Among Movable Obstacles Mike Stilman, 1 Koichi Nishiwaki, 2 Satoshi Kagami, 2 James J. Kuffner 1,2 1 The Robotics Institute 2 Digital Human Research Center Carnegie Mellon
Planning and Executing Navigation Among Movable Obstacles Mike Stilman, 1 Koichi Nishiwaki, 2 Satoshi Kagami, 2 James J. Kuffner 1,2 1 The Robotics Institute 2 Digital Human Research Center Carnegie Mellon
Continuous Collision Detection and Physics
 Continuous Collision Detection and Physics Erwin Coumans, Sony Computer Entertainment August 2005, Draft revision 5 0 Overview A novel approach to Angular and Linear Continuous Collision Detection is presented.
Continuous Collision Detection and Physics Erwin Coumans, Sony Computer Entertainment August 2005, Draft revision 5 0 Overview A novel approach to Angular and Linear Continuous Collision Detection is presented.
Motion autonomy for humanoids: experiments on HRP-2 No. 14. Introduction
 COMPUTER ANIMATION AND VIRTUAL WORLDS Comp. Anim. Virtual Worlds 2009; 20: 511 522 Published online 13 February 2009 in Wiley InterScience (www.interscience.wiley.com).280 Motion autonomy for humanoids:
COMPUTER ANIMATION AND VIRTUAL WORLDS Comp. Anim. Virtual Worlds 2009; 20: 511 522 Published online 13 February 2009 in Wiley InterScience (www.interscience.wiley.com).280 Motion autonomy for humanoids:
Modelling and simulation of the humanoid robot HOAP-3 in the OpenHRP3 platform
 Modelling and simulation of the humanoid robot -3 in the 3 platform C.A. Monje, P. Pierro, T. Ramos, M. González-Fierro, C. Balaguer. Abstract The aim of this work is to model and simulate the humanoid
Modelling and simulation of the humanoid robot -3 in the 3 platform C.A. Monje, P. Pierro, T. Ramos, M. González-Fierro, C. Balaguer. Abstract The aim of this work is to model and simulate the humanoid
Collision and Proximity Queries
 Collision and Proximity Queries Dinesh Manocha (based on slides from Ming Lin) COMP790-058 Fall 2013 Geometric Proximity Queries l Given two object, how would you check: If they intersect with each other
Collision and Proximity Queries Dinesh Manocha (based on slides from Ming Lin) COMP790-058 Fall 2013 Geometric Proximity Queries l Given two object, how would you check: If they intersect with each other
Accurate and Fast Proximity Queries Between Polyhedra Using Convex Surface Decomposition
 EUROGRAPHICS 2001 / A. Chalmers and T.-M. Rhyne (Guest Editors) Volume 20 (2001), Number 3 Accurate and Fast Proximity Queries Between Polyhedra Using Convex Surface Decomposition Stephen A. Ehmann and
EUROGRAPHICS 2001 / A. Chalmers and T.-M. Rhyne (Guest Editors) Volume 20 (2001), Number 3 Accurate and Fast Proximity Queries Between Polyhedra Using Convex Surface Decomposition Stephen A. Ehmann and
Volumetric Particle Separating Planes for Collision Detection
 Volumetric Particle Separating Planes for Collision Detection by Brent M. Dingle Fall 2004 Texas A&M University Abstract In this paper we describe a method of determining the separation plane of two objects
Volumetric Particle Separating Planes for Collision Detection by Brent M. Dingle Fall 2004 Texas A&M University Abstract In this paper we describe a method of determining the separation plane of two objects
Motion Planning of Human-Like Robots using Constrained Coordination
 Motion Planning of Human-Like Robots using Constrained Coordination Liangjun Zhang Jia Pan Dinesh Manocha {zlj,panj,dm}@cs.unc.edu Dept. of Computer Science, University of North Carolina at Chapel Hill
Motion Planning of Human-Like Robots using Constrained Coordination Liangjun Zhang Jia Pan Dinesh Manocha {zlj,panj,dm}@cs.unc.edu Dept. of Computer Science, University of North Carolina at Chapel Hill
Robust Control of Bipedal Humanoid (TPinokio)
") Available online at www.sciencedirect.com Procedia Engineering 41 (2012 ) 643 649 International Symposium on Robotics and Intelligent Sensors 2012 (IRIS 2012) Robust Control of Bipedal Humanoid (TPinokio)
Available online at www.sciencedirect.com Procedia Engineering 41 (2012 ) 643 649 International Symposium on Robotics and Intelligent Sensors 2012 (IRIS 2012) Robust Control of Bipedal Humanoid (TPinokio)
Motion Simulation of a Modular Robotic System
 Motion Simulation of a Modular Robotic System Haruhisa KUROKAWA, Kohji TOMITA, Eiichi YOSHIDA, Satoshi MURATA and Shigeru KOKAJI Mechanical Engineering Laboratory, AIST, MITI Namiki 1-2, Tsukuba, Ibaraki
Motion Simulation of a Modular Robotic System Haruhisa KUROKAWA, Kohji TOMITA, Eiichi YOSHIDA, Satoshi MURATA and Shigeru KOKAJI Mechanical Engineering Laboratory, AIST, MITI Namiki 1-2, Tsukuba, Ibaraki
Visuo-Motor Learning for Face-to-face Pass between Heterogeneous Humanoids
 Visuo-Motor Learning for Face-to-face Pass between Heterogeneous Humanoids Masaki Ogino a,, Masaaki Kikuchi a, Minoru Asada a,b a Dept. of Adaptive Machine Systems b HANDAI Frontier Research Center Graduate
Visuo-Motor Learning for Face-to-face Pass between Heterogeneous Humanoids Masaki Ogino a,, Masaaki Kikuchi a, Minoru Asada a,b a Dept. of Adaptive Machine Systems b HANDAI Frontier Research Center Graduate
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space
 ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
Software Structures for Virtual Environments
 Software Structures for Virtual Environments Michael Zyda Naval Postgraduate School { Zyda }@cs.nps.navy.mil What does VR software look like? One Thread, Multiple Threads Important Subsystems Real-Time
Software Structures for Virtual Environments Michael Zyda Naval Postgraduate School { Zyda }@cs.nps.navy.mil What does VR software look like? One Thread, Multiple Threads Important Subsystems Real-Time
CAB: Fast Update of OBB Trees for Collision Detection between Articulated Bodies
 CAB: Fast Update of OBB Trees for Collision Detection between Articulated Bodies Harald Schmidl Nolan Walker Ming C. Lin {schmidl walkern lin}@cs.unc.edu Department of Computer Science Sitterson Hall,
CAB: Fast Update of OBB Trees for Collision Detection between Articulated Bodies Harald Schmidl Nolan Walker Ming C. Lin {schmidl walkern lin}@cs.unc.edu Department of Computer Science Sitterson Hall,
Real-time Replanning Using 3D Environment for Humanoid Robot
 Real-time Replanning Using 3D Environment for Humanoid Robot Léo Baudouin, Nicolas Perrin, Thomas Moulard, Florent Lamiraux, Olivier Stasse, Eiichi Yoshida To cite this version: Léo Baudouin, Nicolas Perrin,
Real-time Replanning Using 3D Environment for Humanoid Robot Léo Baudouin, Nicolas Perrin, Thomas Moulard, Florent Lamiraux, Olivier Stasse, Eiichi Yoshida To cite this version: Léo Baudouin, Nicolas Perrin,
c 2007 Salvatore Joseph Candido
 c 2007 Salvatore Joseph Candido MOTION PLANNING FOR BIPEDAL WALKING ROBOTS BY SALVATORE JOSEPH CANDIDO B.S., University of Illinois at Urbana-Champaign, 2005 THESIS Submitted in partial fulfillment of
c 2007 Salvatore Joseph Candido MOTION PLANNING FOR BIPEDAL WALKING ROBOTS BY SALVATORE JOSEPH CANDIDO B.S., University of Illinois at Urbana-Champaign, 2005 THESIS Submitted in partial fulfillment of
David Galdeano. LIRMM-UM2, Montpellier, France. Members of CST: Philippe Fraisse, Ahmed Chemori, Sébatien Krut and André Crosnier
 David Galdeano LIRMM-UM2, Montpellier, France Members of CST: Philippe Fraisse, Ahmed Chemori, Sébatien Krut and André Crosnier Montpellier, Thursday September 27, 2012 Outline of the presentation Context
David Galdeano LIRMM-UM2, Montpellier, France Members of CST: Philippe Fraisse, Ahmed Chemori, Sébatien Krut and André Crosnier Montpellier, Thursday September 27, 2012 Outline of the presentation Context
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Control Approaches for Walking and Running
 DLR.de Chart 1 > Humanoids 2015 > Christian Ott > 02.11.2015 Control Approaches for Walking and Running Christian Ott, Johannes Englsberger German Aerospace Center (DLR) DLR.de Chart 2 > Humanoids 2015
DLR.de Chart 1 > Humanoids 2015 > Christian Ott > 02.11.2015 Control Approaches for Walking and Running Christian Ott, Johannes Englsberger German Aerospace Center (DLR) DLR.de Chart 2 > Humanoids 2015
Abstract. 1 Introduction. 2 Translational Penetration Depth
 Fast Penetration Depth Computation and its Applications (http://gamma.cs.unc.edu/deep PD PDG) Young J. Kim Dept. of Computer Sci. and Eng. Ewha Womans Univ., Seoul, Korea kimy@ewha.ac.kr Liangjun Zhang
Fast Penetration Depth Computation and its Applications (http://gamma.cs.unc.edu/deep PD PDG) Young J. Kim Dept. of Computer Sci. and Eng. Ewha Womans Univ., Seoul, Korea kimy@ewha.ac.kr Liangjun Zhang
Torque-Position Transformer for Task Control of Position Controlled Robots
 28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 28 Torque-Position Transformer for Task Control of Position Controlled Robots Oussama Khatib, 1 Peter Thaulad,
28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 28 Torque-Position Transformer for Task Control of Position Controlled Robots Oussama Khatib, 1 Peter Thaulad,
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Cooperative Conveyance of an Object with Tethers by Two Mobile Robots
 Proceeding of the 11th World Congress in Mechanism and Machine Science April 1-4, 2004, Tianjin, China China Machine Press, edited by Tian Huang Cooperative Conveyance of an Object with Tethers by Two
Proceeding of the 11th World Congress in Mechanism and Machine Science April 1-4, 2004, Tianjin, China China Machine Press, edited by Tian Huang Cooperative Conveyance of an Object with Tethers by Two
Written exams of Robotics 2
 Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Incremental Convex Minimization for Computing Collision Translations of Convex Polyhedra
 1 Incremental Convex Minimization for Computing Collision Translations of Convex Polyhedra Claudio Mirolo, Stefano Carpin, and Enrico Pagello Abstract The subject of this paper is an asymptotically fast
1 Incremental Convex Minimization for Computing Collision Translations of Convex Polyhedra Claudio Mirolo, Stefano Carpin, and Enrico Pagello Abstract The subject of this paper is an asymptotically fast
COORDINATED MOTION PLANNING FOR 3D ANIMATION USING CHINESE LION DANCE AS AN EXAMPLE. Fu-Sheng Yu and Tsai-Yen Li
 Appear in Proceedings of International Workshop on Advanced Image Technology, Thailand, 2007. COORDINATED MOTION PLANNING FOR 3D ANIMATION USING CHINESE LION DANCE AS AN EXAMPLE Fu-Sheng Yu and Tsai-Yen
Appear in Proceedings of International Workshop on Advanced Image Technology, Thailand, 2007. COORDINATED MOTION PLANNING FOR 3D ANIMATION USING CHINESE LION DANCE AS AN EXAMPLE Fu-Sheng Yu and Tsai-Yen