Part-Based Models for Object Class Recognition Part 2
|
|
|
- Jesse Holmes
- 5 years ago
- Views:
Transcription
1 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de

![& Elschlager 1973] Model has two components - parts](/docs-images/91/106740115/images/2-3.jpg "(2D image fragments) - structure (configuration of")
2 Class of Object Models: Part-Based Models / Pictorial Structures Pictorial Structures [Fischler & Elschlager 1973] Model has two components - parts (2D image fragments) - structure (configuration of parts)!2
3 State-of-the-Art in Object Class Representations Bag of Words Models (BoW) object model = histogram of local features e.g. local feature around interest points Global Object Models object model = global feature object feature e.g. HOG (Histogram of Oriented Gradients) Part-Based Object Models object model = models of parts & spatial topology model e.g. constellation model or ISM (Implicit Shape Model) But: What is the Ideal Notion of Parts here? And: Should those Parts be Semantic? BoW: no spatial relationships e.g. HOG: fixed spatial relationships e.g. ISM: flexible spatial relationships!3

4 Constellation of Parts Fully connected shape model x 1 x 6 x 2 x 5 x 3 x 4 Weber, Welling, Perona, 00; Fergus, Zisserman, Perona, 03!4
5 Constellation Model Weber, Welling, Perona, 00; Fergus, Zisserman, Perona, 03 Joint model for appearance and structure (=shape) X: positions, A: part appearance, S: scale h: Hypothesis = assignment of features (in the image) to parts (of the model) Gaussian part appearance pdf Gaussian shape pdf Gaussian relative scale pdf Prob. of detection Log(scale)!5
6 Object Detection: ISM (Implicit Shape Model) Appearance of parts: Implicit Shape Model (ISM) [Leibe, Seemann & Schiele, CVPR 2005] x o!6
7 Spatial Models for Categorization Fully connected shape model Star shape model x 1 x 1 x 6 x 2 x 6 x 2 x 5 x 3 x 5 x 3 x 4 x 4 e.g. Constellation Model Parts fully connected Recognition complexity: O(N P ) Method: Exhaustive search e.g. ISM (Implicit Shape Model) Parts mutually independent Recognition complexity: O(NP) Method: Generalized Hough Transform!7
8 Implicit Shape Model: What are Good Parts? Parts of the Implicit Shape Model parts = feature clusters lots of parts (in the order of 1,000-10,000 codebook entries) the more the better! parts are mostly non-semantic parts = (mostly non semantic) feature clusters also true for bag of words models constellation model (much fewer parts - but still feature clusters)...!8
9 Part-Based Models - Overview Today Last Week: Part-Based based on Manual Labeling of Parts - Detection by Components, Multi-Scale Parts The Constellation Model - automatic discovery of parts and part-structure The Implicit Shape Model (ISM) - star-model of part configurations, parts obtained by clustering interest-points Today: Pictorial Structures Model Learning Object Model from CAD Data Deformable Parts Model (DPM) Discussion Semantic Parts vs. Discriminative Parts!9
10 People Detection: partism Appearance of parts: Implicit Shape Model (ISM) [Leibe, Seemann & Schiele, CVPR 2005] x o!10
11 People Detection: partism Appearance of parts: Implicit Shape Model (ISM) [Leibe, Seemann & Schiele, CVPR 2005] Part decomposition and inference: Pictorial structures model [Felzenszwalb & Huttenlocher, IJCV 2005] x 8 x 7 x o x 3 x 6 p(l D) p(d L)p(L) x 2 x 1 x 5 x 4 Body-part positions Image evidence!11
12 Pictorial Structures Model p(l D) = p(d L)p(L) p(d) p(d L)p(L) Body-part positions Image evidence Two Components Prior (capturing possible part configurations): Likelihood of Parts (capturing part appearance): p(l) p(d L)!12
![Pictorial Structures: Model Components [Andriluka,Roth,Schiele@cvpr09] Body is represented as flexible configuration of body parts posterior over body poses p(l D) likelihood of](/docs-images/91/106740115/images/13-4.jpg "observations p(d L)p(L) prior on body poses orientation K likelihood of part N 60 40 estimated pose part posteriors 20 Local Features.... AdaBoost 0 20 40 60 80 100 50 0 50 gure 2.")
13 Pictorial Structures: Model Components Body is represented as flexible configuration of body parts posterior over body poses p(l D) likelihood of observations p(d L)p(L) prior on body poses orientation K likelihood of part N estimated pose part posteriors 20 Local Features.... AdaBoost gure 2. (left) Kine......!13
![Kinematic Tree Prior (modeling the structure) l 9 l 5 l 6 l 7 l 8 l 10 Represent pairwise part relations [Felzenszwalb & Huttenlocher, IJCV 05] l 2 l 1 l 3 l 4 l 2 50 p(l) =p(l 0 ) 40 p(l i l j ), 50](/docs-images/91/106740115/images/14-0.jpg "40 l 1 30 20 (i,j) E 30 20 10 0 10 p(l 2 l 1 )=N(T 12 (l 2 ) T 21 (l 1 ), 20 12 ) 10 0 10 20 30 30 40 40 part locations relative to the joint 50 50 0 50 transformed part locations 50 50 0 50 l 2 l 1")
14 Kinematic Tree Prior (modeling the structure) l 9 l 5 l 6 l 7 l 8 l 10 Represent pairwise part relations [Felzenszwalb & Huttenlocher, IJCV 05] l 2 l 1 l 3 l 4 l 2 50 p(l) =p(l 0 ) 40 p(l i l j ), l (i,j) E p(l 2 l 1 )=N(T 12 (l 2 ) T 21 (l 1 ), ) part locations relative to the joint transformed part locations l 2 l !14
15 Kinematic Tree Prior Prior parameters: {T ij, ij } Parameters of the prior are estimated with maximum likelihood mean pose several independent samples gure Kinematic prior learned on the multi-view a!15
16 Pictorial Structures: Model Components Body is represented as flexible configuration of body parts posterior over body poses p(l D) likelihood of observations p(d L)p(L) prior on body poses orientation K likelihood of part N estimated pose part posteriors 20 Local Features.... AdaBoost gure 2. (left) Kine......!16
17 Likelihood Model Assumption: evidence (image features) for each part independent of all other parts: p(d L) = assumption clearly not correct, but NY p(d i l i ) i=0 allows efficient computation works rather well in practice training data for different body parts should cover all appearances!17

![, PAMI 02; Mikolajczyk&Schmid, PAMI 05] dense representation](/docs-images/91/106740115/images/18-2.jpg "discriminative model: AdaBoost classifier for each body part - Shape")

18 Likelihood Model Build on recent advances in object detection: state-of-the-art image descriptor: Shape Context [Belongie et al., PAMI 02; Mikolajczyk&Schmid, PAMI 05] dense representation discriminative model: AdaBoost classifier for each body part - Shape Context: 96 dimensions (4 angular, 3 radial, 8 gradient orientations) - Feature Vector: concatenate the descriptors inside part bounding box - head: 4032 dimensions - torso: 8448 dimensions!18
19 Likelihood Model Part likelihood derived from the boosting score: decision stump weight p(d i l i ) = max t i,th t (x(l i )) t decision stump output i,t, 0 part location small constant to deal with part occlusions!19


20 Likelihood Model Input image Head Torso Upper leg Our part likelihoods.... [Ramanan, NIPS 06]!20

21 Part-Based Model: 2D Human Pose Estimation

22 Pictorial Structures for Human Pose Estimation: What are Good Parts? Parts of the Pictorial Structures Model parts = semantic body parts pose estimation = estimation of body part configuration semantic body parts allow to use motion capture data, etc. to improve kinematic tree prior non-semantic parts (e.g. in the ISM-model) are more difficult to generalize across human body poses!22
23 Part-Based Models - Overview Today Last Week: Part-Based based on Manual Labeling of Parts - Detection by Components, Multi-Scale Parts The Constellation Model - automatic discovery of parts and part-structure The Implicit Shape Model (ISM) - star-model of part configurations, parts obtained by clustering interest-points Today: Pictorial Structures Model Learning Object Model from CAD Data Deformable Parts Model (DPM) Discussion Semantic Parts vs. Discriminative Parts!23


")
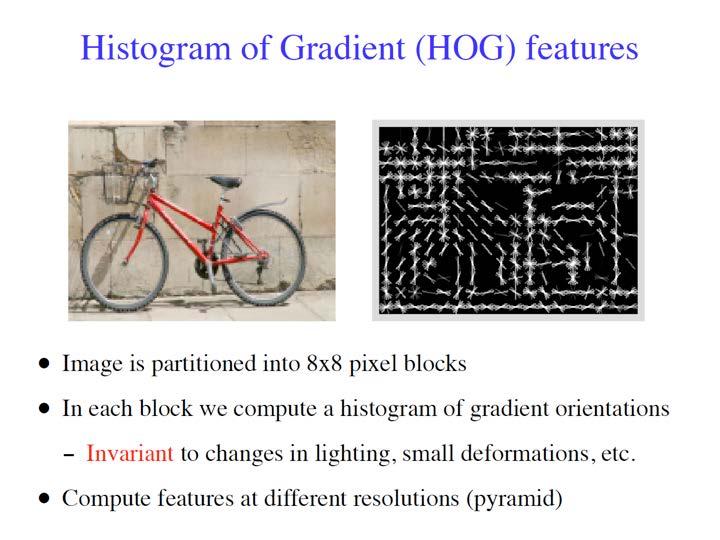
![exist [Stark,Goesele,Schiele@bmvc10]](/docs-images/91/106740115/images/24-4.jpg "Can we learn Object Class Models")

24 Back to the Future: Learning Shape Models from 3D CAD Data 3D Computer Aided Design (CAD) Models Computer graphics, game design Polygonal meshes + texture descriptions semantic part annotations (may) exist [Stark,Goesele,Schiele@bmvc10] Can we learn Object Class Models directly from 3D CAD data? Issue: Transition between 3D CAD models and 2D real-world images!24
25 Constellation Model Weber, Welling, Perona, 00; Fergus, Zisserman, Perona, 03 Joint model for appearance and structure (=shape) X: positions, A: part appearance, S: scale h: Hypothesis = assignment of features (in the image) to parts (of the model) Gaussian part appearance pdf Gaussian shape pdf Gaussian relative scale pdf Prob. of detection Log(scale)!25
![[Stark,Goesele,Schiele@bmvc10] Three Tools to Meet](/docs-images/91/106740115/images/26-0.jpg "the Challenge 1.")


26 Three Tools to Meet the Challenge 1. Shape-based appearance abstraction Non-photorealistic rendering Local shape + global geometry 2. Discriminative part detectors Robust local shape features AdaBoost classifiers 3. Powerful spatial model Full covariance Efficient DDMCMC inference!26
27 Shape-based Appearance Abstraction Non-Photorealistic Rendering Learn shape models from rendered images we do NOT render photo-realistically / texture But focus on 3D CAD model edges (mimic real-world image edges) Part boundaries Mesh creases Silhouette } Final edges (hidden edges removed) [Stark,Goesele,Schiele@bmvc10]!27
28 Shape: Local Shape + Global Geometry [Stark,Goesele,Schiele@bmvc10] Part-based object class representation Semantic parts from 3D CAD models: left front wheel, left front door, etc. View-points Left Front left Front Parts Local shape Global geometry!28












29 Qualitative Results Three strongest true positive detections per viewpoint model Right Back-right Observations Accurate part localization Predicted viewpoints do match!29

30 Shape Model learned from 3D CAD-Data What are Good Parts? Parts of the Shape Model: parts = just means to enable correspondence across 3D-models semantics of parts: - in our case: yes - because of the employed 3D models - but: semantics neither necessary nor important Left Front left Front !30
31 Part-Based Models - Overview Today Last Week: Part-Based based on Manual Labeling of Parts - Detection by Components, Multi-Scale Parts The Constellation Model - automatic discovery of parts and part-structure The Implicit Shape Model (ISM) - star-model of part configurations, parts obtained by clustering interest-points Today: Pictorial Structures Model Learning Object Model from CAD Data Deformable Parts Model (DPM) Discussion Semantic Parts vs. Discriminative Parts!31
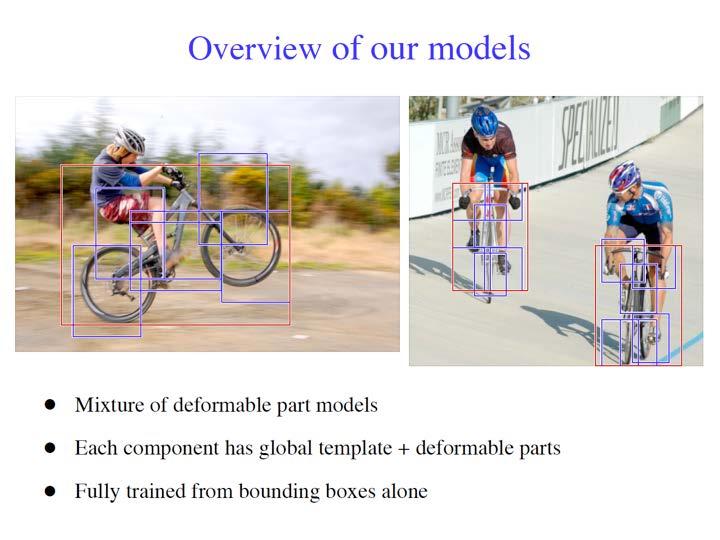
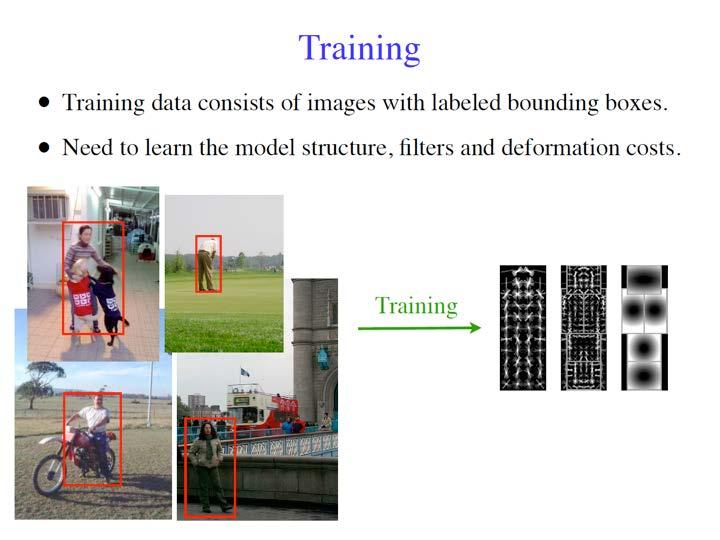
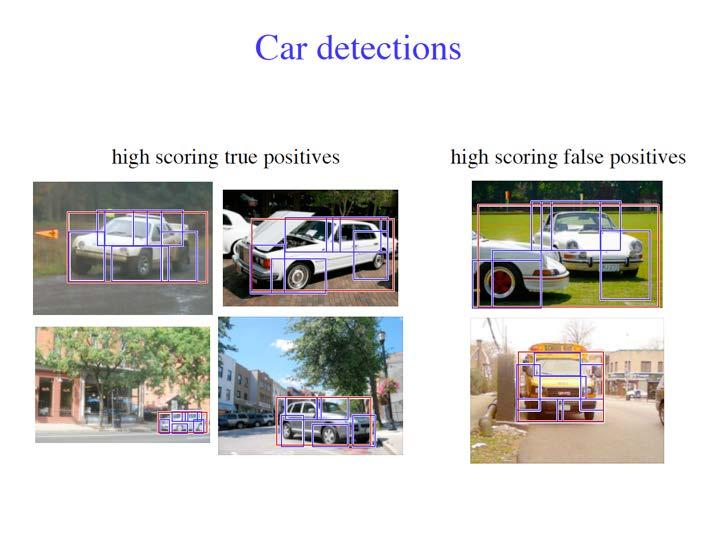
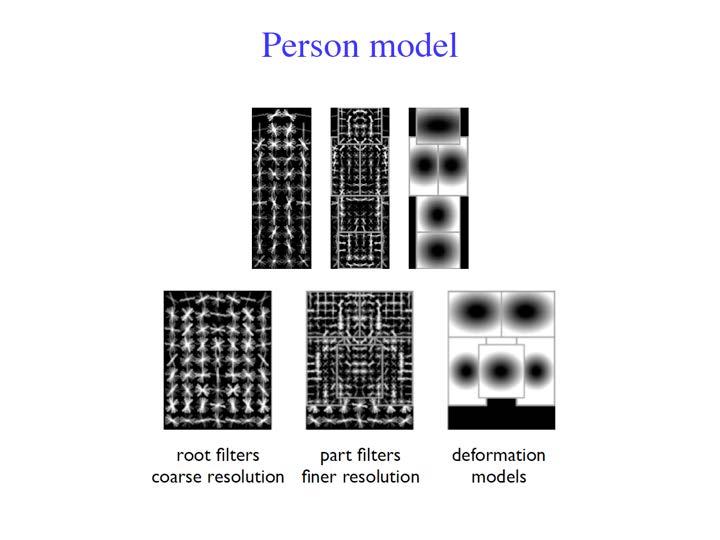
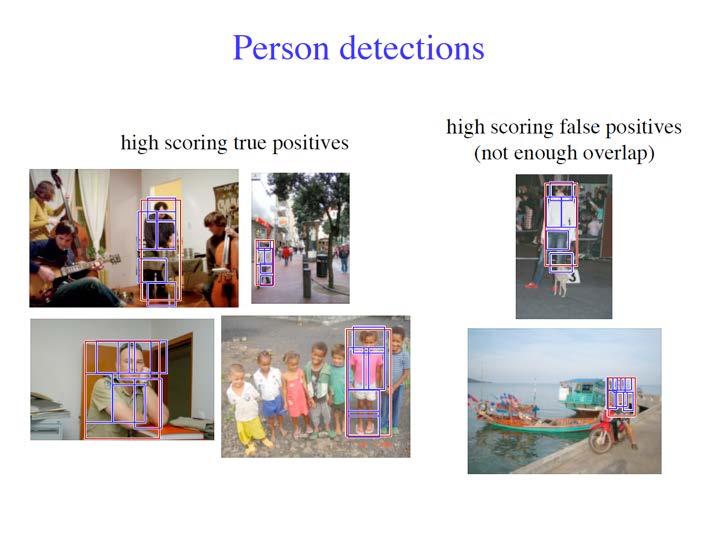
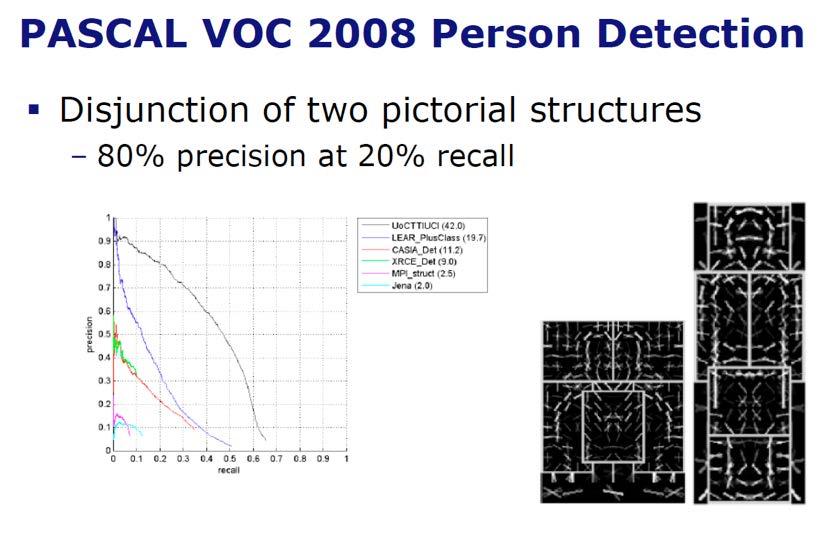
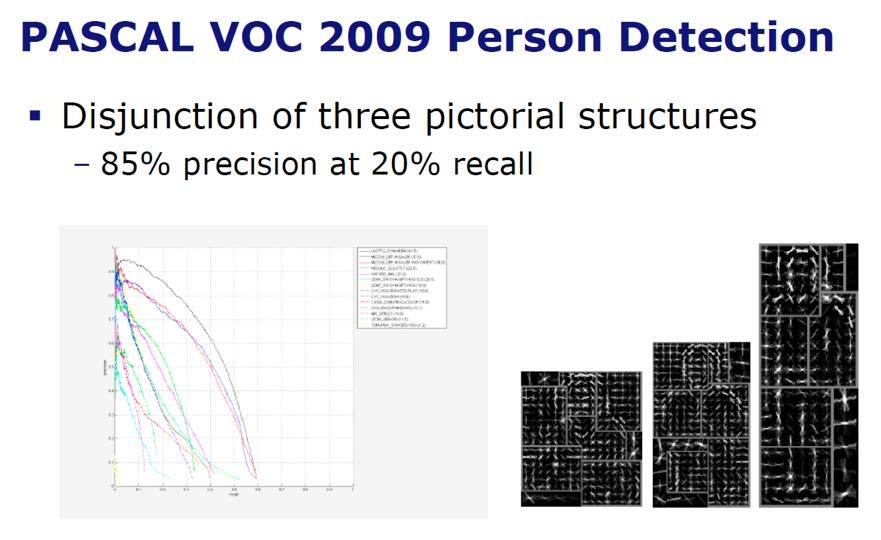
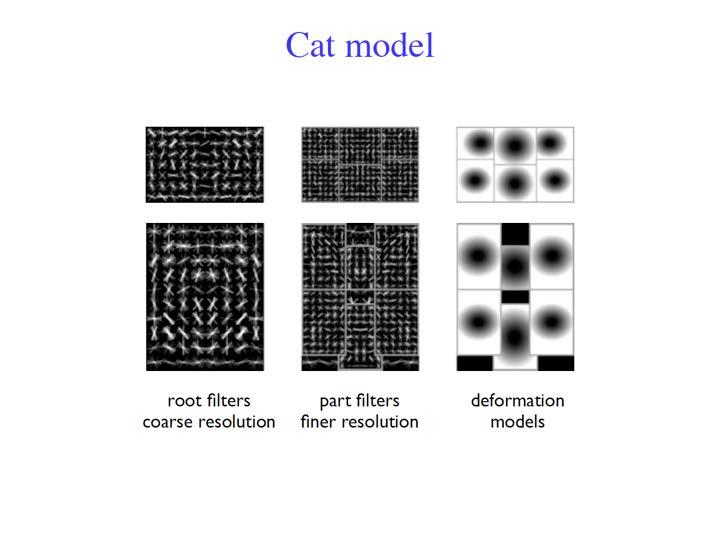
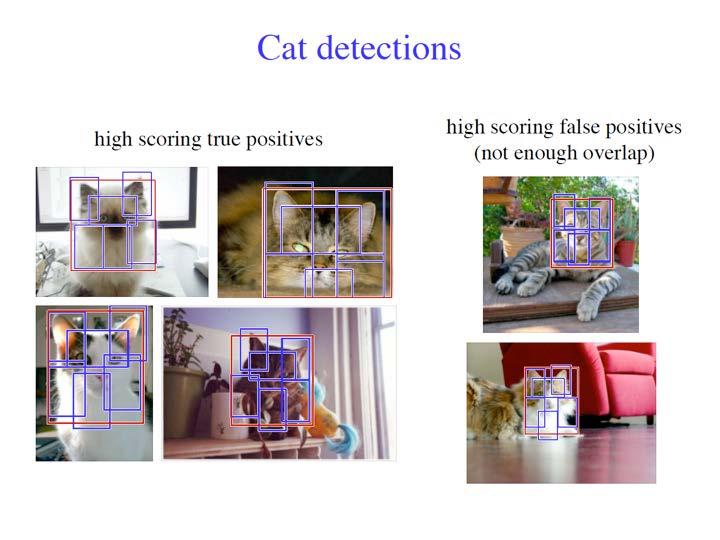
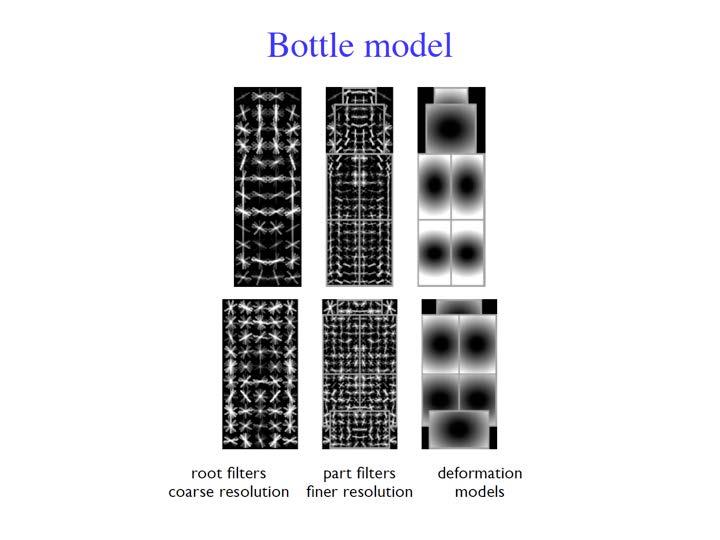
32 slide curtesy: Pedro Felzenszwalb!32
33 !33

34 !34
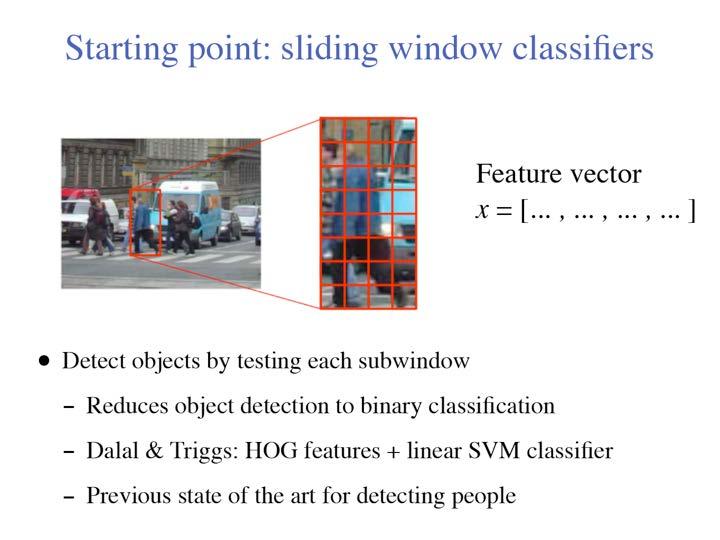
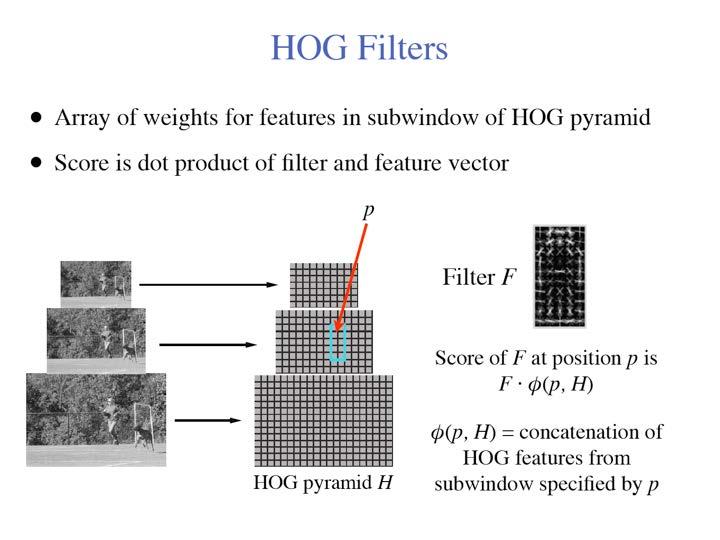
 which feature vector 2) which classifier For example: slide detection window over all positions & scales - HOG Pedestrian Detector - HOG descriptor - linear SVM!")
35 Starting Point: Sliding Window Method Sliding Window Based People Detection: Scan Image Extract Feature Vector Classify Feature Vector Non-Maxima Suppression Two Important Questions: 1) which feature vector 2) which classifier For example: slide detection window over all positions & scales - HOG Pedestrian Detector - HOG descriptor - linear SVM!35

: Static")

36 Histogram of Oriented Gradients (HOG): Static Feature Extraction Input Image Detection Window!36
37 !37
38 !38
39 !39
 > 0!")
40 F (p, H) < 0 F (p, H) > 0!40
41 !41
42 !42
43 !43
44 !44
45 !45
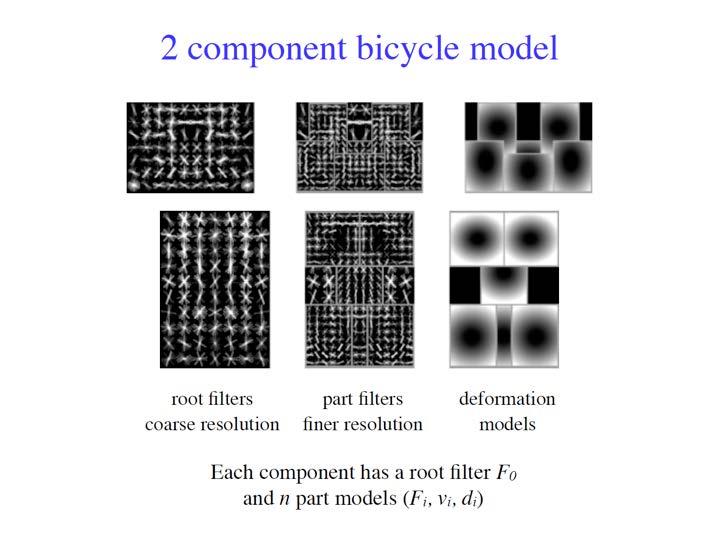
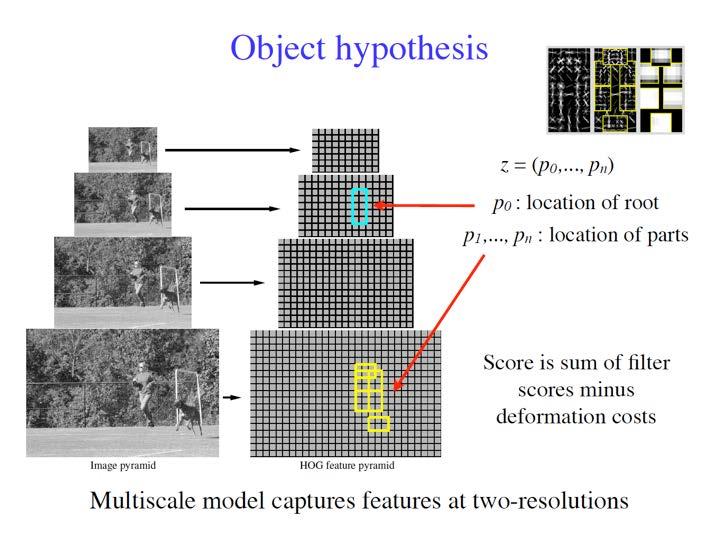
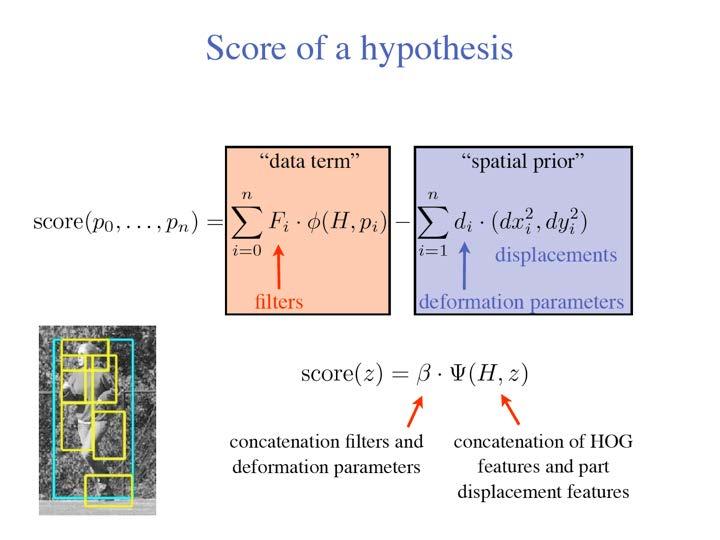
46 Efficient Computation Overall score: score(p 0,...,p n )= nx F i (H, p i ) i=0 Maximization can be done separately: nx i=1 d i (dx 2 i,dy 2 i ) score(p 0 ) = max score(p 0,...,p n ) p 1,...,p n = F 0 (H, p 0 )+ max p 1 F 1 (H, p 1 ) d 1 (dx 2 1,dy 2 1) + + max p n F n (H, p n ) d n (dx 2 n,dy 2 n)!46
47 !47
48 !48
49 !49
50 !50
51 SVM training Classifier scores and example x using: model parameter: feature vector: f(x) = (x) (x) Linear SVM: objective: maximize margin (for best generalization) margin!51
52 SVM training Training data: D =(hx 1,y 1 i,...,hx n,y n i) with y i 2 { 1, 1} Constraints: f(x i ) +1 for y i =+1 f(x i ) apple 1 for y i = 1 ) y i f(x i ) +1 margin Training error: ) 0 1 y i f(x i ) nx max (0, 1 y i f(x i )) i=1!52
53 SVM training Two objectives: maximize margin: minimize training error: Therefore minimize (primal formulation) Hinge loss: min nx min max (0, 1 y i f(x i )) i=1! L( )=min 1 nx max (0, 1 y i f(x i )) i=1 H(z) = max(0, 1 z) 0 z!53
54 sudo!54
55 !55
56 !56
57 !57
58 !58
59 !59

60 slides from Dan Huttenlocher!60
61 !61
62 !62
63 !63
64 !64
65 !65
66 !66
67 Part-Based Models - Overview Today Last Week: Part-Based based on Manual Labeling of Parts - Detection by Components, Multi-Scale Parts The Constellation Model - automatic discovery of parts and part-structure The Implicit Shape Model (ISM) - star-model of part configurations, parts obtained by clustering interest-points Today: Pictorial Structures Model Learning Object Model from CAD Data Deformable Parts Model (DPM) Discussion Semantic Parts vs. Discriminative Parts!67
 (e.g.")
 enable correspondence across 3D models.")
68 What are Ideal Parts for Part-Based Object Models? Parts can/may be semantic body parts - e.g. for articulated human body pose estimation be feature clusters (typically many clusters) (e.g. ISM, constellation model, BoW) support learnability of discriminant appearance (e.g. DPM model) enable correspondence across 3D models... in all those cases: the most important property is that parts facilitate correspondence across object instances!68
69 What are Ideal Parts for Part-Based Object Models? Multiple motivations for part based models exist: intuitiveness: semantic meaning of parts/attributes is attractive (e.g. enables use of language sources) learnability: sharing of parts/attributes across instances/classes scalability: transferability of parts/attributes across classes in general, parts support learnability and scalability when they facilitate correspondence across object instances across object classes across modalities (e.g. from language to visual appearance) and semantics is only a secondary concern (for intuitiveness )!69

70 What are Ideal Parts for Part-Based Object Models? the Good, the Bad, and the Ugly thanks to: Micha Andriluka, Bastian Leibe, Sandra Ebert, Mario Fritz, Diane Larlus, Marcus Rohrbach, Paul Schnitzspan, Stefan Roth, Michael Stark, Michael Goesele
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
Part-Based Models for Object Class Recognition Part 3
 High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Structured Models in. Dan Huttenlocher. June 2010
 Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Object Recognition with Deformable Models
 Object Recognition with Deformable Models Pedro F. Felzenszwalb Department of Computer Science University of Chicago Joint work with: Dan Huttenlocher, Joshua Schwartz, David McAllester, Deva Ramanan.
Object Recognition with Deformable Models Pedro F. Felzenszwalb Department of Computer Science University of Chicago Joint work with: Dan Huttenlocher, Joshua Schwartz, David McAllester, Deva Ramanan.
In Good Shape: Robust People Detection based on Appearance and Shape
 PISHCHULIN et al.: PEOPLE DETECTION USING APPEARANCE AND SHAPE 1 In Good Shape: Robust People Detection based on Appearance and Shape Leonid Pishchulin leonid@mpi-inf.mpg.de Arjun Jain ajain@mpi-inf.mpg.de
PISHCHULIN et al.: PEOPLE DETECTION USING APPEARANCE AND SHAPE 1 In Good Shape: Robust People Detection based on Appearance and Shape Leonid Pishchulin leonid@mpi-inf.mpg.de Arjun Jain ajain@mpi-inf.mpg.de
Development in Object Detection. Junyuan Lin May 4th
 Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Combining PGMs and Discriminative Models for Upper Body Pose Detection
 Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Part-based models. Lecture 10
 Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Lecture 16: Object recognition: Part-based generative models
 Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Automatic Discovery of Meaningful Object Parts with Latent CRFs
 Automatic Discovery of Meaningful Object Parts with Latent CRFs Paul Schnitzspan 1 Stefan Roth 1 Bernt Schiele 1,2 1 Department of Computer Science, TU Darmstadt 2 MPI Informatics, Saarbrücken Abstract
Automatic Discovery of Meaningful Object Parts with Latent CRFs Paul Schnitzspan 1 Stefan Roth 1 Bernt Schiele 1,2 1 Department of Computer Science, TU Darmstadt 2 MPI Informatics, Saarbrücken Abstract
Modern Object Detection. Most slides from Ali Farhadi
 Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
18 October, 2013 MVA ENS Cachan. Lecture 6: Introduction to graphical models Iasonas Kokkinos
 Machine Learning for Computer Vision 1 18 October, 2013 MVA ENS Cachan Lecture 6: Introduction to graphical models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Machine Learning for Computer Vision 1 18 October, 2013 MVA ENS Cachan Lecture 6: Introduction to graphical models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
People-Tracking-by-Detection and People-Detection-by-Tracking
 People-Tracking-by-Detection and People-Detection-by-Tracking Mykhaylo Andriluka Stefan Roth Bernt Schiele Computer Science Department TU Darmstadt, Germany {andriluka, sroth, schiele}@cs.tu-darmstadt.de
People-Tracking-by-Detection and People-Detection-by-Tracking Mykhaylo Andriluka Stefan Roth Bernt Schiele Computer Science Department TU Darmstadt, Germany {andriluka, sroth, schiele}@cs.tu-darmstadt.de
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
Detecting and Segmenting Humans in Crowded Scenes
 Detecting and Segmenting Humans in Crowded Scenes Mikel D. Rodriguez University of Central Florida 4000 Central Florida Blvd Orlando, Florida, 32816 mikel@cs.ucf.edu Mubarak Shah University of Central
Detecting and Segmenting Humans in Crowded Scenes Mikel D. Rodriguez University of Central Florida 4000 Central Florida Blvd Orlando, Florida, 32816 mikel@cs.ucf.edu Mubarak Shah University of Central
Multiple-Person Tracking by Detection
 http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Combining Discriminative Appearance and Segmentation Cues for Articulated Human Pose Estimation
 Combining Discriminative Appearance and Segmentation Cues for Articulated Human Pose Estimation Sam Johnson and Mark Everingham School of Computing University of Leeds {mat4saj m.everingham}@leeds.ac.uk
Combining Discriminative Appearance and Segmentation Cues for Articulated Human Pose Estimation Sam Johnson and Mark Everingham School of Computing University of Leeds {mat4saj m.everingham}@leeds.ac.uk
DPM Score Regressor for Detecting Occluded Humans from Depth Images
 DPM Score Regressor for Detecting Occluded Humans from Depth Images Tsuyoshi Usami, Hiroshi Fukui, Yuji Yamauchi, Takayoshi Yamashita and Hironobu Fujiyoshi Email: usami915@vision.cs.chubu.ac.jp Email:
DPM Score Regressor for Detecting Occluded Humans from Depth Images Tsuyoshi Usami, Hiroshi Fukui, Yuji Yamauchi, Takayoshi Yamashita and Hironobu Fujiyoshi Email: usami915@vision.cs.chubu.ac.jp Email:
Recap Image Classification with Bags of Local Features
 Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Category-level Localization
 Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb,
Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb,
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Revisiting 3D Geometric Models for Accurate Object Shape and Pose
 Revisiting 3D Geometric Models for Accurate Object Shape and Pose M. 1 Michael Stark 2,3 Bernt Schiele 3 Konrad Schindler 1 1 Photogrammetry and Remote Sensing Laboratory Swiss Federal Institute of Technology
Revisiting 3D Geometric Models for Accurate Object Shape and Pose M. 1 Michael Stark 2,3 Bernt Schiele 3 Konrad Schindler 1 1 Photogrammetry and Remote Sensing Laboratory Swiss Federal Institute of Technology
Segmentation. Bottom up Segmentation Semantic Segmentation
 Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Local Features based Object Categories and Object Instances Recognition
 Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
Deformable Part Models
 Deformable Part Models References: Felzenszwalb, Girshick, McAllester and Ramanan, Object Detec@on with Discrimina@vely Trained Part Based Models, PAMI 2010 Code available at hkp://www.cs.berkeley.edu/~rbg/latent/
Deformable Part Models References: Felzenszwalb, Girshick, McAllester and Ramanan, Object Detec@on with Discrimina@vely Trained Part Based Models, PAMI 2010 Code available at hkp://www.cs.berkeley.edu/~rbg/latent/
Course Administration
 Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Multiple Kernel Learning for Emotion Recognition in the Wild
 Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
2/15/2009. Part-Based Models. Andrew Harp. Part Based Models. Detect object from physical arrangement of individual features
 Part-Based Models Andrew Harp Part Based Models Detect object from physical arrangement of individual features 1 Implementation Based on the Simple Parts and Structure Object Detector by R. Fergus Allows
Part-Based Models Andrew Harp Part Based Models Detect object from physical arrangement of individual features 1 Implementation Based on the Simple Parts and Structure Object Detector by R. Fergus Allows
TA Section: Problem Set 4
 TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
High Level Computer Vision. Sliding Window Detection: Viola-Jones-Detector & Histogram of Oriented Gradients (HOG)
") High Level Computer Vision Sliding Window Detection: Viola-Jones-Detector & Histogram of Oriented Gradients (HOG) Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv
High Level Computer Vision Sliding Window Detection: Viola-Jones-Detector & Histogram of Oriented Gradients (HOG) Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv
Action recognition in videos
 Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Strong Appearance and Expressive Spatial Models for Human Pose Estimation
 2013 IEEE International Conference on Computer Vision Strong Appearance and Expressive Spatial Models for Human Pose Estimation Leonid Pishchulin 1 Mykhaylo Andriluka 1 Peter Gehler 2 Bernt Schiele 1 1
2013 IEEE International Conference on Computer Vision Strong Appearance and Expressive Spatial Models for Human Pose Estimation Leonid Pishchulin 1 Mykhaylo Andriluka 1 Peter Gehler 2 Bernt Schiele 1 1
Test-time Adaptation for 3D Human Pose Estimation
 Test-time Adaptation for 3D Human Pose Estimation Sikandar Amin,2, Philipp Müller 2, Andreas Bulling 2, and Mykhaylo Andriluka 2,3 Technische Universität München, Germany 2 Max Planck Institute for Informatics,
Test-time Adaptation for 3D Human Pose Estimation Sikandar Amin,2, Philipp Müller 2, Andreas Bulling 2, and Mykhaylo Andriluka 2,3 Technische Universität München, Germany 2 Max Planck Institute for Informatics,
A novel template matching method for human detection
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2009 A novel template matching method for human detection Duc Thanh Nguyen
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2009 A novel template matching method for human detection Duc Thanh Nguyen
Lecture 15: Detecting Objects by Parts
 Lecture 15: Detecting Objects by Parts David R. Morales, Austin O. Narcomey, Minh-An Quinn, Guilherme Reis, Omar Solis Department of Computer Science Stanford University Stanford, CA 94305 {mrlsdvd, aon2,
Lecture 15: Detecting Objects by Parts David R. Morales, Austin O. Narcomey, Minh-An Quinn, Guilherme Reis, Omar Solis Department of Computer Science Stanford University Stanford, CA 94305 {mrlsdvd, aon2,
Object Detection with Discriminatively Trained Part Based Models
 Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Occlusion Patterns for Object Class Detection
 Occlusion Patterns for Object Class Detection Bojan Pepik1 Michael Stark1,2 Peter Gehler3 Bernt Schiele1 Max Planck Institute for Informatics, 2Stanford University, 3Max Planck Institute for Intelligent
Occlusion Patterns for Object Class Detection Bojan Pepik1 Michael Stark1,2 Peter Gehler3 Bernt Schiele1 Max Planck Institute for Informatics, 2Stanford University, 3Max Planck Institute for Intelligent
Clustered Pose and Nonlinear Appearance Models for Human Pose Estimation
 JOHNSON, EVERINGHAM: CLUSTERED MODELS FOR HUMAN POSE ESTIMATION 1 Clustered Pose and Nonlinear Appearance Models for Human Pose Estimation Sam Johnson s.a.johnson04@leeds.ac.uk Mark Everingham m.everingham@leeds.ac.uk
JOHNSON, EVERINGHAM: CLUSTERED MODELS FOR HUMAN POSE ESTIMATION 1 Clustered Pose and Nonlinear Appearance Models for Human Pose Estimation Sam Johnson s.a.johnson04@leeds.ac.uk Mark Everingham m.everingham@leeds.ac.uk
Find that! Visual Object Detection Primer
 Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering Department of Computer Science 3129D,
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering Department of Computer Science 3129D,
Multiple Pose Context Trees for estimating Human Pose in Object Context
 Multiple Pose Context Trees for estimating Human Pose in Object Context Vivek Kumar Singh Furqan Muhammad Khan Ram Nevatia University of Southern California Los Angeles, CA {viveksin furqankh nevatia}@usc.edu
Multiple Pose Context Trees for estimating Human Pose in Object Context Vivek Kumar Singh Furqan Muhammad Khan Ram Nevatia University of Southern California Los Angeles, CA {viveksin furqankh nevatia}@usc.edu
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
Descriptors for CV. Introduc)on:
on:") Descriptors for CV Content 2014 1.Introduction 2.Histograms 3.HOG 4.LBP 5.Haar Wavelets 6.Video based descriptor 7.How to compare descriptors 8.BoW paradigm 1 2 1 2 Color RGB histogram Introduc)on: Image
Descriptors for CV Content 2014 1.Introduction 2.Histograms 3.HOG 4.LBP 5.Haar Wavelets 6.Video based descriptor 7.How to compare descriptors 8.BoW paradigm 1 2 1 2 Color RGB histogram Introduc)on: Image
A Comparison on Different 2D Human Pose Estimation Method
 A Comparison on Different 2D Human Pose Estimation Method Santhanu P.Mohan 1, Athira Sugathan 2, Sumesh Sekharan 3 1 Assistant Professor, IT Department, VJCET, Kerala, India 2 Student, CVIP, ASE, Tamilnadu,
A Comparison on Different 2D Human Pose Estimation Method Santhanu P.Mohan 1, Athira Sugathan 2, Sumesh Sekharan 3 1 Assistant Professor, IT Department, VJCET, Kerala, India 2 Student, CVIP, ASE, Tamilnadu,
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
EECS 442 Computer vision. Object Recognition
 EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Challenges: intraclass variation
EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Challenges: intraclass variation
Computer Vision. Exercise Session 10 Image Categorization
 Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
CS 231A Computer Vision (Fall 2011) Problem Set 4
 Problem Set 4") CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
Object detection using non-redundant local Binary Patterns
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
The Caltech-UCSD Birds Dataset
 The Caltech-UCSD Birds-200-2011 Dataset Catherine Wah 1, Steve Branson 1, Peter Welinder 2, Pietro Perona 2, Serge Belongie 1 1 University of California, San Diego 2 California Institute of Technology
The Caltech-UCSD Birds-200-2011 Dataset Catherine Wah 1, Steve Branson 1, Peter Welinder 2, Pietro Perona 2, Serge Belongie 1 1 University of California, San Diego 2 California Institute of Technology
Object Recognition Using Pictorial Structures. Daniel Huttenlocher Computer Science Department. In This Talk. Object recognition in computer vision
 Object Recognition Using Pictorial Structures Daniel Huttenlocher Computer Science Department Joint work with Pedro Felzenszwalb, MIT AI Lab In This Talk Object recognition in computer vision Brief definition
Object Recognition Using Pictorial Structures Daniel Huttenlocher Computer Science Department Joint work with Pedro Felzenszwalb, MIT AI Lab In This Talk Object recognition in computer vision Brief definition
Computer Vision II Lecture 14
 Computer Vision II Lecture 14 Articulated Tracking I 08.07.2014 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Outline of This Lecture Single-Object Tracking Bayesian
Computer Vision II Lecture 14 Articulated Tracking I 08.07.2014 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Outline of This Lecture Single-Object Tracking Bayesian
Finding people in repeated shots of the same scene
 1 Finding people in repeated shots of the same scene Josef Sivic 1 C. Lawrence Zitnick Richard Szeliski 1 University of Oxford Microsoft Research Abstract The goal of this work is to find all occurrences
1 Finding people in repeated shots of the same scene Josef Sivic 1 C. Lawrence Zitnick Richard Szeliski 1 University of Oxford Microsoft Research Abstract The goal of this work is to find all occurrences
Lecture 18: Human Motion Recognition
 Lecture 18: Human Motion Recognition Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction Motion classification using template matching Motion classification i using spatio
Lecture 18: Human Motion Recognition Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction Motion classification using template matching Motion classification i using spatio
PEDESTRIAN DETECTION IN CROWDED SCENES VIA SCALE AND OCCLUSION ANALYSIS
 PEDESTRIAN DETECTION IN CROWDED SCENES VIA SCALE AND OCCLUSION ANALYSIS Lu Wang Lisheng Xu Ming-Hsuan Yang Northeastern University, China University of California at Merced, USA ABSTRACT Despite significant
PEDESTRIAN DETECTION IN CROWDED SCENES VIA SCALE AND OCCLUSION ANALYSIS Lu Wang Lisheng Xu Ming-Hsuan Yang Northeastern University, China University of California at Merced, USA ABSTRACT Despite significant
Human detection using local shape and nonredundant
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Human detection using local shape and nonredundant binary patterns
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Human detection using local shape and nonredundant binary patterns
Fast, Accurate Detection of 100,000 Object Classes on a Single Machine
 Fast, Accurate Detection of 100,000 Object Classes on a Single Machine Thomas Dean etal. Google, Mountain View, CA CVPR 2013 best paper award Presented by: Zhenhua Wang 2013.12.10 Outline Background This
Fast, Accurate Detection of 100,000 Object Classes on a Single Machine Thomas Dean etal. Google, Mountain View, CA CVPR 2013 best paper award Presented by: Zhenhua Wang 2013.12.10 Outline Background This
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS
 LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS Alexey Dosovitskiy, Jost Tobias Springenberg and Thomas Brox University of Freiburg Presented by: Shreyansh Daftry Visual Learning and Recognition
LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS Alexey Dosovitskiy, Jost Tobias Springenberg and Thomas Brox University of Freiburg Presented by: Shreyansh Daftry Visual Learning and Recognition
Key Developments in Human Pose Estimation for Kinect
 Key Developments in Human Pose Estimation for Kinect Pushmeet Kohli and Jamie Shotton Abstract The last few years have seen a surge in the development of natural user interfaces. These interfaces do not
Key Developments in Human Pose Estimation for Kinect Pushmeet Kohli and Jamie Shotton Abstract The last few years have seen a surge in the development of natural user interfaces. These interfaces do not
Fusing shape and appearance information for object category detection
 1 Fusing shape and appearance information for object category detection Andreas Opelt, Axel Pinz Graz University of Technology, Austria Andrew Zisserman Dept. of Engineering Science, University of Oxford,
1 Fusing shape and appearance information for object category detection Andreas Opelt, Axel Pinz Graz University of Technology, Austria Andrew Zisserman Dept. of Engineering Science, University of Oxford,
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Object Category Detection: Sliding Windows
 03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
Is 2D Information Enough For Viewpoint Estimation? Amir Ghodrati, Marco Pedersoli, Tinne Tuytelaars BMVC 2014
 Is 2D Information Enough For Viewpoint Estimation? Amir Ghodrati, Marco Pedersoli, Tinne Tuytelaars BMVC 2014 Problem Definition Viewpoint estimation: Given an image, predicting viewpoint for object of
Is 2D Information Enough For Viewpoint Estimation? Amir Ghodrati, Marco Pedersoli, Tinne Tuytelaars BMVC 2014 Problem Definition Viewpoint estimation: Given an image, predicting viewpoint for object of
Person Detection in Images using HoG + Gentleboost. Rahul Rajan June 1st July 15th CMU Q Robotics Lab
 Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Repositorio Institucional de la Universidad Autónoma de Madrid.
 Repositorio Institucional de la Universidad Autónoma de Madrid https://repositorio.uam.es Esta es la versión de autor de la comunicación de congreso publicada en: This is an author produced version of
Repositorio Institucional de la Universidad Autónoma de Madrid https://repositorio.uam.es Esta es la versión de autor de la comunicación de congreso publicada en: This is an author produced version of
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Feature Selection using Constellation Models
 Feature Selection using Constellation Models Heydar Maboudi Afkham, Carl Herik Ek and Stefan Calsson Computer Vision and Active Perception Lab. Royal Institute of Technology (KTH) Stockholm, Sweden {heydarma,chek,stefanc}@csc.kth.se
Feature Selection using Constellation Models Heydar Maboudi Afkham, Carl Herik Ek and Stefan Calsson Computer Vision and Active Perception Lab. Royal Institute of Technology (KTH) Stockholm, Sweden {heydarma,chek,stefanc}@csc.kth.se
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
High-Level Fusion of Depth and Intensity for Pedestrian Classification
 High-Level Fusion of Depth and Intensity for Pedestrian Classification Marcus Rohrbach 1,3, Markus Enzweiler 2 and Dariu M. Gavrila 1,4 1 Environment Perception, Group Research, Daimler AG, Ulm, Germany
High-Level Fusion of Depth and Intensity for Pedestrian Classification Marcus Rohrbach 1,3, Markus Enzweiler 2 and Dariu M. Gavrila 1,4 1 Environment Perception, Group Research, Daimler AG, Ulm, Germany
CV as making bank. Intel buys Mobileye! $15 billion. Mobileye:
 CV as making bank Intel buys Mobileye! $15 billion Mobileye: Spin-off from Hebrew University, Israel 450 engineers 15 million cars installed 313 car models June 2016 - Tesla left Mobileye Fatal crash car
CV as making bank Intel buys Mobileye! $15 billion Mobileye: Spin-off from Hebrew University, Israel 450 engineers 15 million cars installed 313 car models June 2016 - Tesla left Mobileye Fatal crash car
Learning to Localize Objects with Structured Output Regression
 Learning to Localize Objects with Structured Output Regression Matthew Blaschko and Christopher Lampert ECCV 2008 Best Student Paper Award Presentation by Jaeyong Sung and Yiting Xie 1 Object Localization
Learning to Localize Objects with Structured Output Regression Matthew Blaschko and Christopher Lampert ECCV 2008 Best Student Paper Award Presentation by Jaeyong Sung and Yiting Xie 1 Object Localization
Object detection. Announcements. Last time: Mid-level cues 2/23/2016. Wed Feb 24 Kristen Grauman UT Austin
 Object detection Wed Feb 24 Kristen Grauman UT Austin Announcements Reminder: Assignment 2 is due Mar 9 and Mar 10 Be ready to run your code again on a new test set on Mar 10 Vision talk next Tuesday 11
Object detection Wed Feb 24 Kristen Grauman UT Austin Announcements Reminder: Assignment 2 is due Mar 9 and Mar 10 Be ready to run your code again on a new test set on Mar 10 Vision talk next Tuesday 11
Tracking People. Tracking People: Context
 Tracking People A presentation of Deva Ramanan s Finding and Tracking People from the Bottom Up and Strike a Pose: Tracking People by Finding Stylized Poses Tracking People: Context Motion Capture Surveillance
Tracking People A presentation of Deva Ramanan s Finding and Tracking People from the Bottom Up and Strike a Pose: Tracking People by Finding Stylized Poses Tracking People: Context Motion Capture Surveillance
LEARNING MODELS FOR MULTI-VIEWPOINT OBJECT DETECTION
 LEARNING MODELS FOR MULTI-VIEWPOINT OBJECT DETECTION Akash M. Kushal, Ph.D. Department of Computer Science University of Illinois at Urbana-Champaign, 2008 Jean Ponce, Adviser This dissertation addresses
LEARNING MODELS FOR MULTI-VIEWPOINT OBJECT DETECTION Akash M. Kushal, Ph.D. Department of Computer Science University of Illinois at Urbana-Champaign, 2008 Jean Ponce, Adviser This dissertation addresses
Incremental Learning of Object Detectors Using a Visual Shape Alphabet
 Incremental Learning of Object Detectors Using a Visual Shape Alphabet A. Opelt, A. Pinz & A. Zisserman CVPR 06 Presented by Medha Bhargava* * Several slides adapted from authors presentation, CVPR 06
Incremental Learning of Object Detectors Using a Visual Shape Alphabet A. Opelt, A. Pinz & A. Zisserman CVPR 06 Presented by Medha Bhargava* * Several slides adapted from authors presentation, CVPR 06
Qualitative Pose Estimation by Discriminative Deformable Part Models
 Qualitative Pose Estimation by Discriminative Deformable Part Models Hyungtae Lee, Vlad I. Morariu, and Larry S. Davis University of Maryland, College Park Abstract. We present a discriminative deformable
Qualitative Pose Estimation by Discriminative Deformable Part Models Hyungtae Lee, Vlad I. Morariu, and Larry S. Davis University of Maryland, College Park Abstract. We present a discriminative deformable
Pictorial Structures for Object Recognition
 Pictorial Structures for Object Recognition Felzenszwalb and Huttenlocher Presented by Stephen Krotosky Pictorial Structures Introduced by Fischler and Elschlager in 1973 Objects are modeled by a collection
Pictorial Structures for Object Recognition Felzenszwalb and Huttenlocher Presented by Stephen Krotosky Pictorial Structures Introduced by Fischler and Elschlager in 1973 Objects are modeled by a collection
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
High Level Computer Vision. Basic Image Processing - April 26, 2o17. Bernt Schiele - Mario Fritz -
 High Level Computer Vision Basic Image Processing - April 26, 2o17 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de mpi-inf.mpg.de/hlcv Today - Basics of Digital Image Processing
High Level Computer Vision Basic Image Processing - April 26, 2o17 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de mpi-inf.mpg.de/hlcv Today - Basics of Digital Image Processing
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model
 Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Multiple Instance Feature for Robust Part-based Object Detection
 Multiple Instance Feature for Robust Part-based Object Detection Zhe Lin University of Maryland College Park, MD 2742 zhelin@umiacs.umd.edu Gang Hua Microsoft Live Labs Research Redmond, WA 9852 ganghua@microsoft.com
Multiple Instance Feature for Robust Part-based Object Detection Zhe Lin University of Maryland College Park, MD 2742 zhelin@umiacs.umd.edu Gang Hua Microsoft Live Labs Research Redmond, WA 9852 ganghua@microsoft.com