Part-based and local feature models for generic object recognition
|
|
|
- Marvin Ellis
- 5 years ago
- Views:
Transcription

1 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis
2 Announcements PS2 grades up on SmartSite PS2 stats: Mean: Standard Dev: Vote on piazza for last lecture content 2
3 Support Vector Machines (SVMs) Discriminative classifier based on optimal separating line (for 2d case) Maximize the margin between the positive and negative training examples 3
4 SVMs for recognition 1. Define your representation for each example. 2. Select a kernel function. 3. Compute pairwise kernel values between labeled examples 4. Use this kernel matrix to solve for SVM support vectors & weights. 5. To classify a new example: compute kernel values between new input and support vectors, apply weights, check sign of output. 4
5 Example: learning gender with SVMs Moghaddam and Yang, Learning Gender with Support Faces, TPAMI Moghaddam and Yang, Face & Gesture


6 Face alignment processing Processed faces Moghaddam and Yang, Learning Gender with Support Faces, TPAMI
7 Learning gender with SVMs Training examples: 1044 males 713 females Experiment with various kernels, select Gaussian RBF xi x K( xi, x j) = exp( 2 2σ j 2 ) 7
8 Support Faces Moghaddam and Yang, Learning Gender with Support Faces, TPAMI

9 Moghaddam and Yang, Learning Gender with Support Faces, TPAMI
10 Gender perception experiment: How well can humans do? Subjects: 30 people (22 male, 8 female) Ages mid-20 s to mid-40 s Test data: 254 face images Low res (6 males, 4 females) High res versions Task: Classify as male or female, forced choice No time limit Moghaddam and Yang, Face & Gesture

11 Gender perception experiment: How well can humans do? Moghaddam and Yang, Face & Gesture Error Error 11
12 Human vs. Machine SVMs performed better than any single human test subject, at either resolution 12

13 Hardest examples for humans Moghaddam and Yang, Face & Gesture
14 Questions What if the features are not 2d? What if the data is not linearly separable? What if we have more than just two categories? 14
15 Multi-class SVMs Achieve multi-class classifier by combining a number of binary classifiers One vs. all Training: learn an SVM for each class vs. the rest Testing: apply each SVM to test example and assign to it the class of the SVM that returns the highest decision value One vs. one Training: learn an SVM for each pair of classes Testing: each learned SVM votes for a class to assign to the test example 15
16 SVMs: Pros and cons Pros Many publicly available SVM packages: Kernel-based framework is very powerful, flexible Often a sparse set of support vectors compact at test time Work very well in practice, even with very small training sample sizes Cons No direct multi-class SVM, must combine two-class SVMs Can be tricky to select best kernel function for a problem Computation, memory During training time, must compute matrix of kernel values for every pair of examples Learning can take a very long time for large-scale problems 16 Adapted from Lana Lazebnik
17 Previously Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition when combined with window-based or holistic appearance descriptors 17



18 Global window-based appearance representations Gist Map of local orientations Histograms of oriented gradients These examples are truly global; each pixel in the window contributes to the representation. Classifier can account for relative relevance When might this not be ideal? 18 Kristen Grauman
19 Kristen Grauman Part-based and local feature models for recognition Main idea: Rather than a representation based on holistic appearance, decompose the image into: local parts or patches, and their relative spatial relationships 19
20 Kristen Grauman Part-based and local feature models for recognition We ll look at three forms: 1. Bag of words (no geometry) 2. Implicit shape model (star graph for spatial model) 3. Constellation model (fully connected graph for spatial model) 20
 of word occurrences.")

21 Kristen Grauman Bag-of-words model Summarize entire image based on its distribution (histogram) of word occurrences. Total freedom on spatial positions, relative geometry. Vector representation easily usable by most classifiers. 21
22 Bag-of-words model Csurka et al. Visual Categorization with Bags of Keypoints,

23 Words as parts Csurka et al All local features Local features from two selected clusters occurring in this image 23
 = p( c) N n= 1 p( w n c) Object class decision Prior prob.")

24 Naïve Bayes model for classification c = arg max c p( c w) p( c) p( w c) = p( c) N n= 1 p( w n c) Object class decision Prior prob. of the object classes Image likelihood given the class NN patches What assumptions does the model make, and what are their significance? 24
25 Confusion matrix Example bag of words + Naïve Bayes classification results for generic categorization of objects 25 Csurka et al. 2004

26 Kristen Grauman Clutter or context? 26



27 Sampling strategies Specific object Category 27 Kristen Grauman




28 Sampling strategies Sparse, at interest points Dense, uniformly Randomly To find specific, textured objects, sparse sampling from interest points more reliable. Multiple complementary interest operators offer more image coverage. Multiple interest operators Image credits: F-F. Li, E. Nowak, J. Sivic For object categorization, dense sampling offers better coverage. [See Nowak, Jurie & Triggs, ECCV 2006] 28 Kristen Grauman
29 Kristen Grauman Local feature correspondence for generic object categories 29
30 Local feature correspondence for generic object categories Comparing bags of words histograms coarsely reflects agreement between local parts (patches, words). But choice of quantization directly determines what we consider to be similar 30 Kristen Grauman
31 Partially matching sets of features Optimal match: O(m 3 ) Greedy match: O(m 2 log m) Pyramid match: O(m) (m=num pts) We introduce an approximate matching kernel that makes it practical to compare large sets of features based on their partial correspondences. [Previous work: Indyk & Thaper, Bartal, Charikar, Agarwal & Varadarajan, ] 31 Kristen Grauman
![32 [Grauman & Darrell, ICCV 2005] Pyramid match: main idea Feature space partitions](/docs-images/89/99951225/images/32-3.jpg "serve to match the local descriptors within successively wider regions.")
32 32 [Grauman & Darrell, ICCV 2005] Pyramid match: main idea Feature space partitions serve to match the local descriptors within successively wider regions. descriptor space

33 Pyramid match: main idea Histogram intersection counts number of possible matches at a given partitioning. 33 [Grauman & Darrell, ICCV 2005]
34 34 [Grauman & Darrell, ICCV 2005] Pyramid match kernel measures difficulty of a match at level number of newly matched pairs at level For similarity, weights inversely proportional to bin size (or may be learned) Normalize these kernel values to avoid favoring large sets

 optimal partial")
35 35 [Grauman & Darrell, ICCV 2005] Pyramid match kernel Optimal match: O(m 3 ) Pyramid match: O(mL) optimal partial matching
36 36 Kristen Grauman Highlights of the pyramid match Linear time complexity Formal bounds on expected error Mercer kernel Data-driven partitions allow accurate matches even in high-dim. feature spaces Strong performance on benchmark object recognition datasets




37 Example recognition results: Caltech-101 dataset 101 categories images per class 37 Data provided by Fei-Fei, Fergus, and Perona
38 Recognition results: Caltech-101 dataset Jain, Huynh, & Grauman (2007) 38


39 Unordered sets of local features: No spatial layout preserved! Too much? Too little? 40
40 Spatial pyramid match Make a pyramid of bag-of-words histograms. Provides some loose (global) spatial layout information Sum over PMKs computed in image coordinate space, one per word. [Lazebnik, Schmid & Ponce, CVPR 2006] 41 Kristen Grauman


41 Spatial pyramid match Captures scene categories well---texture-like patterns but with some variability in the positions of all the local pieces. Confusion matrix 42 Kristen Grauman
42 Spatial pyramid match Captures scene categories well---texture-like patterns but with some variability in the positions of all the local pieces. 43 Kristen Grauman
43 Kristen Grauman Part-based and local feature models for recognition We ll look at three forms: 1. Bag of words (no geometry) 2. Implicit shape model (star graph for spatial model) 3. Constellation model (fully connected graph for spatial model) 44
44 Shape representation in part-based models Star shape model x 1 x 6 x 2 x 5 x 3 x 4 e.g. implicit shape model Parts mutually independent N image features, P parts in the model 45
45 Implicit shape models Visual vocabulary is used to index votes for object position [a visual word = part ] training image annotated with object localization info visual codeword with displacement vectors B. Leibe, A. Leonardis, and B. Schiele, Combined Object Categorization and Segmentation with an Implicit Shape Model, ECCV Workshop on Statistical Learning in Computer Vision
![Implicit shape models Visual vocabulary is used to index votes for object position [a visual word = part ] test image B. Leibe, A. Leonardis, and B.](/docs-images/89/99951225/images/46-0.jpg "Schiele, Combined Object Categorization and Segmentation with an Implicit Shape Model, ECCV Workshop on Statistical Learning in Computer Vision 2004")
46 Implicit shape models Visual vocabulary is used to index votes for object position [a visual word = part ] test image B. Leibe, A. Leonardis, and B. Schiele, Combined Object Categorization and Segmentation with an Implicit Shape Model, ECCV Workshop on Statistical Learning in Computer Vision

47 Implicit shape models: Training 1. Build vocabulary of patches around extracted interest points using clustering 48
48 Implicit shape models: Training 1. Build vocabulary of patches around extracted interest points using clustering 2. Map the patch around each interest point to closest word 49


49 Implicit shape models: Training 1. Build vocabulary of patches around extracted interest points using clustering 2. Map the patch around each interest point to closest word 3. For each word, store all positions it was found, relative to object center 50
50 Implicit shape models: Testing 1. Given new test image, extract patches, match to vocabulary words 2. Cast votes for possible positions of object center 3. Search for maxima in voting space 4. (Extract weighted segmentation mask based on stored masks for the codebook occurrences) What is the dimension of the Hough space? 51

51 Implicit shape models: Testing 52
52 Example: Results on Cows Visual Perceptual Object and Recognition Sensory Augmented Tutorial Computing Original image 53
53 Example: Results on Cows Visual Perceptual Object and Recognition Sensory Augmented Tutorial Computing Interest Original points image 54
54 Example: Results on Cows Visual Perceptual Object and Recognition Sensory Augmented Tutorial Computing Matched Interest Original points patches image 55




55 Example: Results on Cows Visual Perceptual Object and Recognition Sensory Augmented Tutorial Computing Matched Interest Original Votes patches points image 56
56 Example: Results on Cows Visual Perceptual Object and Recognition Sensory Augmented Tutorial Computing 1 st hypothesis 57
57 Example: Results on Cows Visual Perceptual Object and Recognition Sensory Augmented Tutorial Computing 2 nd hypothesis 58

58 Example: Results on Cows Visual Perceptual Object and Recognition Sensory Augmented Tutorial Computing 3 rd hypothesis 59











59 Detection Results Qualitative Performance Recognizes different kinds of objects Visual Perceptual Object and Recognition Sensory Augmented Tutorial Computing Robust to clutter, occlusion, noise, low contrast 60
60 Shape representation in part-based models Star shape model Fully connected constellation model x 1 x 1 x 6 x 2 x 6 x 2 x 5 x 3 x 5 x 3 x 4 x 4 e.g. implicit shape model Parts mutually independent e.g. Constellation Model Parts fully connected N image features, P parts in the model 61 Slide credit: Rob Fergus
61 Probabilistic constellation model P( image object) = P( appearance, shape object) = max h P( appearance h, object) p( shape h, object) p( h h: assignment Part of features to Part parts descriptors locations object) Candidate parts 62 Source: Lana Lazebnik
62 Probabilistic constellation model P( image object) = P( appearance, shape object) = max h P( appearance h, object) p( shape h, object) p( h object) h: assignment of features to parts Part 1 Part 3 Part 2 63 Source: Lana Lazebnik
 p( shape h, object) p( h object) h: assignment of features to parts Part 1 Part 3 Part 2 64 Source: Lana")
63 Probabilistic constellation model P( image object) = P( appearance, shape object) = max h P( appearance h, object) p( shape h, object) p( h object) h: assignment of features to parts Part 1 Part 3 Part 2 64 Source: Lana Lazebnik

64 Example results from constellation model: data from four categories Slide from Li Fei-Fei 65
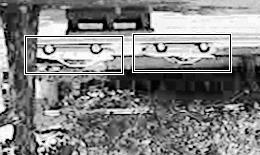
65 Face model Appearance: 10 patches closest to mean for each part Recognition results 66 Fergus et al. CVPR 2003


66 Face model Appearance: 10 patches closest to mean for each part Recognition results Test images: size of circles indicates score of hypothesis 67 Kristen Grauman Fergus et al. CVPR 2003

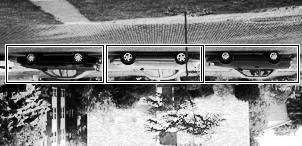
67 Motorbike model Appearance: 10 patches closest to mean for each part Recognition results 68 Kristen Grauman Fergus et al. CVPR 2003

68 Spotted cat model Appearance: 10 patches closest to mean for each part Recognition results 69 Kristen Grauman Fergus et al. CVPR 2003
69 Shape representation in part-based models Star shape model Fully connected constellation model x 1 x 1 x 6 x 2 x 6 x 2 x 5 x 3 x 5 x 3 x 4 x 4 e.g. implicit shape model Parts mutually independent Recognition complexity: O(NP) Method: Gen. Hough Transform e.g. Constellation Model Parts fully connected Recognition complexity: O(N P ) Method: Exhaustive search N image features, P parts in the model 70 Slide credit: Rob Fergus
70 Summary: part-based and local feature models for generic object recognition Histograms of visual words to capture global or local layout in the bag-of-words framework Pyramid match kernels Powerful in practice for image recognition Part-based models encode category s part appearance together with 2d layout and allow detection within cluttered image implicit shape model : shape based on layout of all parts relative to a reference part; Generalized Hough for detection constellation model : explicitly model mutual spatial layout between all pairs of parts; exhaustive search for best fit of features to parts 71





")
71 Recognition models Instances: recognition by alignment Kristen Grauman Categories: Holistic appearance models (and sliding window detection) Categories: Local feature and part-based models 72
72 Questions? See you Tuesday! 73
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Visual Object Recognition
 Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
By Suren Manvelyan,
 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
Introduction to object recognition. Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others
 Introduction to object recognition Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others Overview Basic recognition tasks A statistical learning approach Traditional or shallow recognition
Introduction to object recognition Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others Overview Basic recognition tasks A statistical learning approach Traditional or shallow recognition
Recognition Tools: Support Vector Machines
 CS 2770: Computer Vision Recognition Tools: Support Vector Machines Prof. Adriana Kovashka University of Pittsburgh January 12, 2017 Announcement TA office hours: Tuesday 4pm-6pm Wednesday 10am-12pm Matlab
CS 2770: Computer Vision Recognition Tools: Support Vector Machines Prof. Adriana Kovashka University of Pittsburgh January 12, 2017 Announcement TA office hours: Tuesday 4pm-6pm Wednesday 10am-12pm Matlab
Bag of Words Models. CS4670 / 5670: Computer Vision Noah Snavely. Bag-of-words models 11/26/2013
 CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
Bag-of-features. Cordelia Schmid
 Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Fitting: Voting and the Hough Transform April 23 rd, Yong Jae Lee UC Davis
 Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Object detection. Announcements. Last time: Mid-level cues 2/23/2016. Wed Feb 24 Kristen Grauman UT Austin
 Object detection Wed Feb 24 Kristen Grauman UT Austin Announcements Reminder: Assignment 2 is due Mar 9 and Mar 10 Be ready to run your code again on a new test set on Mar 10 Vision talk next Tuesday 11
Object detection Wed Feb 24 Kristen Grauman UT Austin Announcements Reminder: Assignment 2 is due Mar 9 and Mar 10 Be ready to run your code again on a new test set on Mar 10 Vision talk next Tuesday 11
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Object Detection. Sanja Fidler CSC420: Intro to Image Understanding 1/ 1
 Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Object Classification Problem
 HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
TA Section: Problem Set 4
 TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
Efficient Kernels for Identifying Unbounded-Order Spatial Features
 Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Image classification Computer Vision Spring 2018, Lecture 18
 Image classification http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 18 Course announcements Homework 5 has been posted and is due on April 6 th. - Dropbox link because course
Image classification http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 18 Course announcements Homework 5 has been posted and is due on April 6 th. - Dropbox link because course
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Part-based models. Lecture 10
 Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Indexing local features and instance recognition May 16 th, 2017
 Indexing local features and instance recognition May 16 th, 2017 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 16 th, 2017 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 14 th, 2015
 Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Loose Shape Model for Discriminative Learning of Object Categories
 Loose Shape Model for Discriminative Learning of Object Categories Margarita Osadchy and Elran Morash Computer Science Department University of Haifa Mount Carmel, Haifa 31905, Israel rita@cs.haifa.ac.il
Loose Shape Model for Discriminative Learning of Object Categories Margarita Osadchy and Elran Morash Computer Science Department University of Haifa Mount Carmel, Haifa 31905, Israel rita@cs.haifa.ac.il
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
CS 4495 Computer Vision Classification 3: Bag of Words. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Classification 3: Bag of Words Aaron Bobick School of Interactive Computing Administrivia PS 6 is out. Due Tues Nov 25th, 11:55pm. One more assignment after that Mea culpa This
CS 4495 Computer Vision Classification 3: Bag of Words Aaron Bobick School of Interactive Computing Administrivia PS 6 is out. Due Tues Nov 25th, 11:55pm. One more assignment after that Mea culpa This
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Distances and Kernels. Motivation
 Distances and Kernels Amirshahed Mehrtash Motivation How similar? 1 Problem Definition Designing a fast system to measure the similarity il it of two images. Used to categorize images based on appearance.
Distances and Kernels Amirshahed Mehrtash Motivation How similar? 1 Problem Definition Designing a fast system to measure the similarity il it of two images. Used to categorize images based on appearance.
Computer Vision. Exercise Session 10 Image Categorization
 Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Model Fitting: The Hough transform II
 Model Fitting: The Hough transform II Guido Gerig, CS6640 Image Processing, Utah Theory: See handwritten notes GG: HT-notes-GG-II.pdf Credits: S. Narasimhan, CMU, Spring 2006 15-385,-685, Link Svetlana
Model Fitting: The Hough transform II Guido Gerig, CS6640 Image Processing, Utah Theory: See handwritten notes GG: HT-notes-GG-II.pdf Credits: S. Narasimhan, CMU, Spring 2006 15-385,-685, Link Svetlana
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
OBJECT CATEGORIZATION
 OBJECT CATEGORIZATION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it Slides: Ing. Lamberto Ballan November 18th, 2009 What is an Object? Merriam-Webster Definition: Something material that may be
OBJECT CATEGORIZATION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it Slides: Ing. Lamberto Ballan November 18th, 2009 What is an Object? Merriam-Webster Definition: Something material that may be
Lecture 8: Fitting. Tuesday, Sept 25
 Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Aggregating Descriptors with Local Gaussian Metrics
 Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
Modern Object Detection. Most slides from Ali Farhadi
 Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Today. Main questions 10/30/2008. Bag of words models. Last time: Local invariant features. Harris corner detector: rotation invariant detection
 Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
Visual words. Map high-dimensional descriptors to tokens/words by quantizing the feature space.
 Visual words Map high-dimensional descriptors to tokens/words by quantizing the feature space. Quantize via clustering; cluster centers are the visual words Word #2 Descriptor feature space Assign word
Visual words Map high-dimensional descriptors to tokens/words by quantizing the feature space. Quantize via clustering; cluster centers are the visual words Word #2 Descriptor feature space Assign word
Local features, distances and kernels. Plan for today
 Local features, distances and kernels February 5, 2009 Kristen Grauman UT Austin Plan for today Lecture : local features and matchi Papers: Video Google [Sivic & Zisserman] Pyramid match [Grauman & Darrell]
Local features, distances and kernels February 5, 2009 Kristen Grauman UT Austin Plan for today Lecture : local features and matchi Papers: Video Google [Sivic & Zisserman] Pyramid match [Grauman & Darrell]
Bias-Variance Trade-off + Other Models and Problems
 CS 1699: Intro to Computer Vision Bias-Variance Trade-off + Other Models and Problems Prof. Adriana Kovashka University of Pittsburgh November 3, 2015 Outline Support Vector Machines (review + other uses)
CS 1699: Intro to Computer Vision Bias-Variance Trade-off + Other Models and Problems Prof. Adriana Kovashka University of Pittsburgh November 3, 2015 Outline Support Vector Machines (review + other uses)
String distance for automatic image classification
 String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
CLASSIFICATION Experiments
 CLASSIFICATION Experiments January 27,2015 CS3710: Visual Recognition Bhavin Modi Bag of features Object Bag of words 1. Extract features 2. Learn visual vocabulary Bag of features: outline 3. Quantize
CLASSIFICATION Experiments January 27,2015 CS3710: Visual Recognition Bhavin Modi Bag of features Object Bag of words 1. Extract features 2. Learn visual vocabulary Bag of features: outline 3. Quantize
Descriptors for CV. Introduc)on:
on:") Descriptors for CV Content 2014 1.Introduction 2.Histograms 3.HOG 4.LBP 5.Haar Wavelets 6.Video based descriptor 7.How to compare descriptors 8.BoW paradigm 1 2 1 2 Color RGB histogram Introduc)on: Image
Descriptors for CV Content 2014 1.Introduction 2.Histograms 3.HOG 4.LBP 5.Haar Wavelets 6.Video based descriptor 7.How to compare descriptors 8.BoW paradigm 1 2 1 2 Color RGB histogram Introduc)on: Image
Artistic ideation based on computer vision methods
 Journal of Theoretical and Applied Computer Science Vol. 6, No. 2, 2012, pp. 72 78 ISSN 2299-2634 http://www.jtacs.org Artistic ideation based on computer vision methods Ferran Reverter, Pilar Rosado,
Journal of Theoretical and Applied Computer Science Vol. 6, No. 2, 2012, pp. 72 78 ISSN 2299-2634 http://www.jtacs.org Artistic ideation based on computer vision methods Ferran Reverter, Pilar Rosado,
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections
 Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections Nima Razavi 1, Juergen Gall 1, and Luc Van Gool 1,2 1 Computer Vision Laboratory, ETH Zurich 2 ESAT-PSI/IBBT,
Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections Nima Razavi 1, Juergen Gall 1, and Luc Van Gool 1,2 1 Computer Vision Laboratory, ETH Zurich 2 ESAT-PSI/IBBT,
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
EECS 442 Computer vision. Object Recognition
 EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Challenges: intraclass variation
EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Challenges: intraclass variation
Finding 2D Shapes and the Hough Transform
 CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
Local Features based Object Categories and Object Instances Recognition
 Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
Feature Matching + Indexing and Retrieval
 CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
Improved Spatial Pyramid Matching for Image Classification
 Improved Spatial Pyramid Matching for Image Classification Mohammad Shahiduzzaman, Dengsheng Zhang, and Guojun Lu Gippsland School of IT, Monash University, Australia {Shahid.Zaman,Dengsheng.Zhang,Guojun.Lu}@monash.edu
Improved Spatial Pyramid Matching for Image Classification Mohammad Shahiduzzaman, Dengsheng Zhang, and Guojun Lu Gippsland School of IT, Monash University, Australia {Shahid.Zaman,Dengsheng.Zhang,Guojun.Lu}@monash.edu
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
Object recognition. Methods for classification and image representation
 Object recognition Methods for classification and image representation Credits Slides by Pete Barnum Slides by FeiFei Li Paul Viola, Michael Jones, Robust Realtime Object Detection, IJCV 04 Navneet Dalal
Object recognition Methods for classification and image representation Credits Slides by Pete Barnum Slides by FeiFei Li Paul Viola, Michael Jones, Robust Realtime Object Detection, IJCV 04 Navneet Dalal
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Recognition with Bag-ofWords. (Borrowing heavily from Tutorial Slides by Li Fei-fei)
") Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei) Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words
Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei) Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words
Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition
 Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition Bangpeng Yao 1, Juan Carlos Niebles 2,3, Li Fei-Fei 1 1 Department of Computer Science, Princeton University, NJ 08540, USA
Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition Bangpeng Yao 1, Juan Carlos Niebles 2,3, Li Fei-Fei 1 1 Department of Computer Science, Princeton University, NJ 08540, USA
Face Detection and Alignment. Prof. Xin Yang HUST
 Face Detection and Alignment Prof. Xin Yang HUST Many slides adapted from P. Viola Face detection Face detection Basic idea: slide a window across image and evaluate a face model at every location Challenges
Face Detection and Alignment Prof. Xin Yang HUST Many slides adapted from P. Viola Face detection Face detection Basic idea: slide a window across image and evaluate a face model at every location Challenges
High Level Computer Vision
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Announcements, schedule. Lecture 8: Fitting. Weighted graph representation. Outline. Segmentation by Graph Cuts. Images as graphs
 Announcements, schedule Lecture 8: Fitting Tuesday, Sept 25 Grad student etensions Due of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Announcements, schedule Lecture 8: Fitting Tuesday, Sept 25 Grad student etensions Due of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Object Classification for Video Surveillance
 Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
10/03/11. Model Fitting. Computer Vision CS 143, Brown. James Hays. Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem
 10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
Linear combinations of simple classifiers for the PASCAL challenge
 Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Indexing local features and instance recognition May 15 th, 2018
 Indexing local features and instance recognition May 15 th, 2018 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 15 th, 2018 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Category-level Localization
 Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb,
Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb,
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Segmentation and Grouping April 19 th, 2018
 Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Segmentation and Grouping April 21 st, 2015
 Segmentation and Grouping April 21 st, 2015 Yong Jae Lee UC Davis Announcements PS0 grades are up on SmartSite Please put name on answer sheet 2 Features and filters Transforming and describing images;
Segmentation and Grouping April 21 st, 2015 Yong Jae Lee UC Davis Announcements PS0 grades are up on SmartSite Please put name on answer sheet 2 Features and filters Transforming and describing images;
Prof. Kristen Grauman
 Fitting Prof. Kristen Grauman UT Austin Fitting Want to associate a model with observed features [Fig from Marszalek & Schmid, 2007] For eample, the model could be a line, a circle, or an arbitrary shape.
Fitting Prof. Kristen Grauman UT Austin Fitting Want to associate a model with observed features [Fig from Marszalek & Schmid, 2007] For eample, the model could be a line, a circle, or an arbitrary shape.
Lecture 16: Object recognition: Part-based generative models
 Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Object Recognition and Detection
 CS 2770: Computer Vision Object Recognition and Detection Prof. Adriana Kovashka University of Pittsburgh March 16, 21, 23, 2017 Plan for the next few lectures Recognizing the category in the image as
CS 2770: Computer Vision Object Recognition and Detection Prof. Adriana Kovashka University of Pittsburgh March 16, 21, 23, 2017 Plan for the next few lectures Recognizing the category in the image as
Generative and discriminative classification techniques
 Generative and discriminative classification techniques Machine Learning and Category Representation 013-014 Jakob Verbeek, December 13+0, 013 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.13.14
Generative and discriminative classification techniques Machine Learning and Category Representation 013-014 Jakob Verbeek, December 13+0, 013 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.13.14
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 19 Object Recognition II Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 19 Object Recognition II Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications
 Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features
 Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Methods for Representing and Recognizing 3D objects
 Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
arxiv: v3 [cs.cv] 3 Oct 2012
![arxiv: v3 [cs.cv] 3 Oct 2012](/thumbs/96/128756091.jpg "arxiv: v3 [cs.cv] 3 Oct 2012") Combined Descriptors in Spatial Pyramid Domain for Image Classification Junlin Hu and Ping Guo arxiv:1210.0386v3 [cs.cv] 3 Oct 2012 Image Processing and Pattern Recognition Laboratory Beijing Normal University,
Combined Descriptors in Spatial Pyramid Domain for Image Classification Junlin Hu and Ping Guo arxiv:1210.0386v3 [cs.cv] 3 Oct 2012 Image Processing and Pattern Recognition Laboratory Beijing Normal University,
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
EECS 442 Computer vision. Fitting methods
 EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
CS4495/6495 Introduction to Computer Vision. 8C-L1 Classification: Discriminative models
 CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
Lecture 9: Hough Transform and Thresholding base Segmentation
 #1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
#1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
Machine Learning Crash Course
 Machine Learning Crash Course Photo: CMU Machine Learning Department protests G20 Computer Vision James Hays Slides: Isabelle Guyon, Erik Sudderth, Mark Johnson, Derek Hoiem The machine learning framework
Machine Learning Crash Course Photo: CMU Machine Learning Department protests G20 Computer Vision James Hays Slides: Isabelle Guyon, Erik Sudderth, Mark Johnson, Derek Hoiem The machine learning framework