Modeling Light. Slides from Alexei A. Efros and others
|
|
|
- Brittney Miles
- 5 years ago
- Views:
Transcription
1 Project 3 Results
2 Stereo Recap Epipolar geometry Epipoles are intersection of baseline with image planes Matching point in second image is on a line passing through its epipole Fundamental matrix maps from a point in one image to a line (its epipolar line) in the other Can solve for F given corresponding points (e.g., interest points) Stereo depth estimation Estimate disparity by finding corresponding points along scanlines Depth is inverse to disparity Projected, structured lighting can replace one of the cameras

3 Modeling Light Slides from Alexei A. Efros and others cs129: Computational Photography James Hays, Brown, Fall 2012
4 What is light? Electromagnetic radiation (EMR) moving along rays in space R( ) is EMR, measured in units of power (watts) is wavelength Useful things: Light travels in straight lines In vacuum, radiance emitted = radiance arriving i.e. there is no transmission loss
5 What do we see? 3D world 2D image Point of observation Figures Stephen E. Palmer, 2002


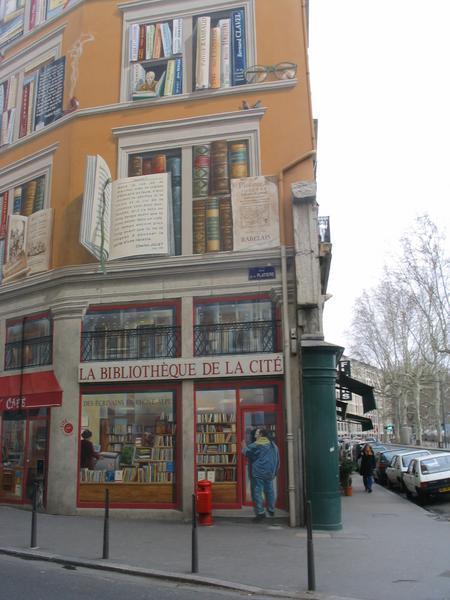
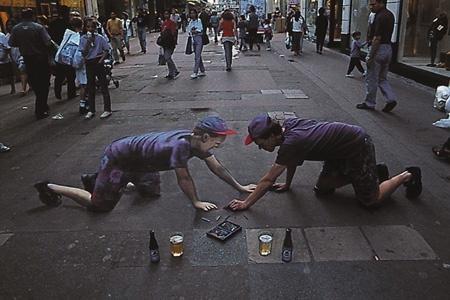
6 What do we see? 3D world 2D image Point of observation Painted backdrop
7 On Simulating the Visual Experience Just feed the eyes the right data No one will know the difference! Philosophy: Ancient question: Does the world really exist? Science fiction: Many, many, many books on the subject, e.g. slowglass from Light of Other Days Latest take: The Matrix Physics: Slowglass might be possible? Computer Science: Virtual Reality To simulate we need to know: What does a person see?
8 The Plenoptic Function Figure by Leonard McMillan Q: What is the set of all things that we can ever see? A: The Plenoptic Function (Adelson & Bergen) Let s start with a stationary person and try to parameterize everything that he can see
, but spherical coordinate are nicer)")
9 Grayscale snapshot is intensity of light P( ) Seen from a single view point At a single time Averaged over the wavelengths of the visible spectrum (can also do P(x,y), but spherical coordinate are nicer)
10 Color snapshot is intensity of light P( ) Seen from a single view point At a single time As a function of wavelength

11 A movie is intensity of light P(,t) Seen from a single view point Over time As a function of wavelength
12 Holographic movie is intensity of light Seen from ANY viewpoint Over time As a function of wavelength P(,t,V X,V Y,V Z )

13 The Plenoptic Function P(,t,V X,V Y,V Z ) Can reconstruct every possible view, at every moment, from every position, at every wavelength Contains every photograph, every movie, everything that anyone has ever seen! it completely captures our visual reality! Not bad for a function
14 Sampling Plenoptic Function (top view) Just lookup Google Street View
15 Model geometry or just capture images?

16
17 Ray Let s not worry about time and color: 5D 3D position 2D direction P( V X,V Y,V Z ) Slide by Rick Szeliski and Michael Cohen




18 How can we use this? Lighting No Change in Radiance Surface Camera
19 Ray Reuse Infinite line Assume light is constant (vacuum) 4D 2D direction 2D position non-dispersive medium Slide by Rick Szeliski and Michael Cohen
20 Only need plenoptic surface
21 Synthesizing novel views Slide by Rick Szeliski and Michael Cohen
22 Lumigraph / Lightfield Outside convex space 4D Empty Stuff Slide by Rick Szeliski and Michael Cohen
23 Lumigraph - Organization 2D position 2D direction s Slide by Rick Szeliski and Michael Cohen
24 Lumigraph - Organization 2D position 2D position s u 2 plane parameterization Slide by Rick Szeliski and Michael Cohen
25 Lumigraph - Organization 2D position 2D position t s,t s,t u,v v 2 plane parameterization s u u,v Slide by Rick Szeliski and Michael Cohen
26 Lumigraph - Organization Hold s,t constant Let u,v vary An image s,t u,v Slide by Rick Szeliski and Michael Cohen

27 Lumigraph / Lightfield
28 Lumigraph - Capture Idea 1 Move camera carefully over s,t plane Gantry see Lightfield paper s,t u,v Slide by Rick Szeliski and Michael Cohen
29 Lumigraph - Capture Idea 2 Move camera anywhere Rebinning see Lumigraph paper s,t u,v Slide by Rick Szeliski and Michael Cohen
30 Lumigraph - Rendering For each output pixel determine s,t,u,v either use closest discrete RGB interpolate near values s u Slide by Rick Szeliski and Michael Cohen
31 Lumigraph - Rendering Nearest closest s closest u draw it Blend 16 nearest quadrilinear interpolation s u Slide by Rick Szeliski and Michael Cohen


32 Stanford multi-camera array pixels 30 fps 128 cameras synchronized timing continuous streaming flexible arrangement


33 Light field photography using a handheld plenoptic camera Commercialized as Lytro Ren Ng, Marc Levoy, Mathieu Brédif, Gene Duval, Mark Horowitz and Pat Hanrahan
34 Conventional versus light field camera Marc Levoy


35 Marc Levoy Conventional versus light field camera uv-plane st-plane





36 Prototype camera Contax medium format camera Kodak 16-megapixel sensor Adaptive Optics microlens array 125μ square-sided microlenses pixels lenses = pixels per lens

37
38 Marc Levoy Digitally stopping-down Σ Σ stopping down = summing only the central portion of each microlens
39 Marc Levoy Digital refocusing Σ Σ refocusing = summing windows extracted from several microlenses

40 Example of digital refocusing Marc Levoy


41 Marc Levoy Digitally moving the observer Σ moving the observer = moving the window we extract from the microlenses Σ



42 Example of moving the observer Marc Levoy
43 P(x,t) by David Dewey
44 2D: Image What is an image? All rays through a point Panorama? Slide by Rick Szeliski and Michael Cohen
45 Image Image plane 2D position

")
46 Spherical Panorama See also: 2003 New Years Eve All light rays through a point form a ponorama Totally captured in a 2D array -- P( ) Where is the geometry???




47 Other ways to sample Plenoptic Function Moving in time: Spatio-temporal volume: P(,t) Useful to study temporal changes Long an interest of artists: Claude Monet, Haystacks studies

48 Space-time images Other ways to slice the plenoptic function t y x

")

49 The Theatre Workshop Metaphor (Adelson & Pentland,1996) desired image Painter Lighting Designer Sheet-metal worker
")

50 Painter (images)

51 Lighting Designer (environment maps) Show Naimark SF MOMA video


52 Sheet-metal Worker (geometry) Let surface normals do all the work!

53 working together clever Italians Want to minimize cost Each one does what s easiest for him Geometry big things Images detail Lighting illumination effects
Modeling Light. Michal Havlik
 Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 What is light? Electromagnetic radiation (EMR) moving along rays in space R( ) is EMR, measured in units of
Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 What is light? Electromagnetic radiation (EMR) moving along rays in space R( ) is EMR, measured in units of
Modeling Light. Michal Havlik : Computational Photography Alexei Efros, CMU, Fall 2011
 Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 What is light? Electromagnetic radiation (EMR) moving along rays in space R(λ) is EMR, measured in units of power
Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 What is light? Electromagnetic radiation (EMR) moving along rays in space R(λ) is EMR, measured in units of power
Modeling Light. Michal Havlik
 Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 What is light? Electromagnetic radiation (EMR) moving along rays in space R(λ) is EMR, measured in units of power
Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 What is light? Electromagnetic radiation (EMR) moving along rays in space R(λ) is EMR, measured in units of power
Modeling Light. Michal Havlik : Computational Photography Alexei Efros, CMU, Fall 2007
 Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 The Plenoptic Function Figure by Leonard McMillan Q: What is the set of all things that we can ever see? A: The
Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 The Plenoptic Function Figure by Leonard McMillan Q: What is the set of all things that we can ever see? A: The
CSCI 1290: Comp Photo
 CSCI 1290: Comp Photo Fall 2018 @ Brown University James Tompkin Many slides thanks to James Hays old CS 129 course, along with all of its acknowledgements. What do we see? 3D world 2D image Point of observation
CSCI 1290: Comp Photo Fall 2018 @ Brown University James Tompkin Many slides thanks to James Hays old CS 129 course, along with all of its acknowledgements. What do we see? 3D world 2D image Point of observation
Modeling Light. On Simulating the Visual Experience
 Modeling Light 15-463: Rendering and Image Processing Alexei Efros On Simulating the Visual Experience Just feed the eyes the right data No one will know the difference! Philosophy: Ancient question: Does
Modeling Light 15-463: Rendering and Image Processing Alexei Efros On Simulating the Visual Experience Just feed the eyes the right data No one will know the difference! Philosophy: Ancient question: Does
Light Field Spring
 Light Field 2015 Spring Recall: Light is Electromagnetic radiation (EMR) moving along rays in space R(l) is EMR, measured in units of power (watts) l is wavelength Useful things: Light travels in straight
Light Field 2015 Spring Recall: Light is Electromagnetic radiation (EMR) moving along rays in space R(l) is EMR, measured in units of power (watts) l is wavelength Useful things: Light travels in straight
Image or Object? Is this real?
 Image or Object? Michael F. Cohen Microsoft Is this real? Photo by Patrick Jennings (patrick@synaptic.bc.ca), Copyright 1995, 96, 97 Whistler B. C. Canada Modeling, Rendering, and Lighting 1 A mental model?
Image or Object? Michael F. Cohen Microsoft Is this real? Photo by Patrick Jennings (patrick@synaptic.bc.ca), Copyright 1995, 96, 97 Whistler B. C. Canada Modeling, Rendering, and Lighting 1 A mental model?
But, vision technology falls short. and so does graphics. Image Based Rendering. Ray. Constant radiance. time is fixed. 3D position 2D direction
 Computer Graphics -based rendering Output Michael F. Cohen Microsoft Research Synthetic Camera Model Computer Vision Combined Output Output Model Real Scene Synthetic Camera Model Real Cameras Real Scene
Computer Graphics -based rendering Output Michael F. Cohen Microsoft Research Synthetic Camera Model Computer Vision Combined Output Output Model Real Scene Synthetic Camera Model Real Cameras Real Scene
Computational Photography
 Computational Photography Matthias Zwicker University of Bern Fall 2010 Today Light fields Introduction Light fields Signal processing analysis Light field cameras Application Introduction Pinhole camera
Computational Photography Matthias Zwicker University of Bern Fall 2010 Today Light fields Introduction Light fields Signal processing analysis Light field cameras Application Introduction Pinhole camera
Image-Based Rendering
 Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Plenoptic camera and its Applications
 Aum Sri Sairam Plenoptic camera and its Applications Agenda: 1. Introduction 2. Single lens stereo design 3. Plenoptic camera design 4. Depth estimation 5. Synthetic refocusing 6. Fourier slicing 7. References
Aum Sri Sairam Plenoptic camera and its Applications Agenda: 1. Introduction 2. Single lens stereo design 3. Plenoptic camera design 4. Depth estimation 5. Synthetic refocusing 6. Fourier slicing 7. References
Announcements. Light. Properties of light. Light. Project status reports on Wednesday. Readings. Today. Readings Szeliski, 2.2, 2.3.
 Announcements Project status reports on Wednesday prepare 5 minute ppt presentation should contain: problem statement (1 slide) description of approach (1 slide) some images (1 slide) current status +
Announcements Project status reports on Wednesday prepare 5 minute ppt presentation should contain: problem statement (1 slide) description of approach (1 slide) some images (1 slide) current status +
Computational Photography: Real Time Plenoptic Rendering
 Computational Photography: Real Time Plenoptic Rendering Andrew Lumsdaine, Georgi Chunev Indiana University Todor Georgiev Adobe Systems Who was at the Keynote Yesterday? 2 Overview Plenoptic cameras Rendering
Computational Photography: Real Time Plenoptic Rendering Andrew Lumsdaine, Georgi Chunev Indiana University Todor Georgiev Adobe Systems Who was at the Keynote Yesterday? 2 Overview Plenoptic cameras Rendering
Image-Based Modeling and Rendering
 Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Focal stacks and lightfields
 Focal stacks and lightfields http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 11 Course announcements Homework 3 is out. - Due October 12 th.
Focal stacks and lightfields http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 11 Course announcements Homework 3 is out. - Due October 12 th.
More and More on Light Fields. Last Lecture
 More and More on Light Fields Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 4 Last Lecture Re-review with emphasis on radiometry Mosaics & Quicktime VR The Plenoptic function The main
More and More on Light Fields Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 4 Last Lecture Re-review with emphasis on radiometry Mosaics & Quicktime VR The Plenoptic function The main
Image-based modeling (IBM) and image-based rendering (IBR)
 and image-based rendering (IBR)") Image-based modeling (IBM) and image-based rendering (IBR) CS 248 - Introduction to Computer Graphics Autumn quarter, 2005 Slides for December 8 lecture The graphics pipeline modeling animation rendering
Image-based modeling (IBM) and image-based rendering (IBR) CS 248 - Introduction to Computer Graphics Autumn quarter, 2005 Slides for December 8 lecture The graphics pipeline modeling animation rendering
The Focused Plenoptic Camera. Lightfield photographers, focus your cameras! Karl Marx
 The Focused Plenoptic Camera Lightfield photographers, focus your cameras! Karl Marx Plenoptic Camera, Adelson 1992 Main lens focused on microlenses Plenoptic Camera, Adelson 1992 Microlenses focused on
The Focused Plenoptic Camera Lightfield photographers, focus your cameras! Karl Marx Plenoptic Camera, Adelson 1992 Main lens focused on microlenses Plenoptic Camera, Adelson 1992 Microlenses focused on
Light Fields. Johns Hopkins Department of Computer Science Course : Rendering Techniques, Professor: Jonathan Cohen
 Light Fields Light Fields By Levoy and Hanrahan, SIGGRAPH 96 Representation for sampled plenoptic function stores data about visible light at various positions and directions Created from set of images
Light Fields Light Fields By Levoy and Hanrahan, SIGGRAPH 96 Representation for sampled plenoptic function stores data about visible light at various positions and directions Created from set of images
Image-Based Modeling and Rendering
 Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
Structure from Motion and Multi- view Geometry. Last lecture
 Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
VIDEO FOR VIRTUAL REALITY LIGHT FIELD BASICS JAMES TOMPKIN
 VIDEO FOR VIRTUAL REALITY LIGHT FIELD BASICS JAMES TOMPKIN WHAT IS A LIGHT FIELD? Light field seems to have turned into a catch-all term for many advanced camera/display technologies. WHAT IS A LIGHT FIELD?
VIDEO FOR VIRTUAL REALITY LIGHT FIELD BASICS JAMES TOMPKIN WHAT IS A LIGHT FIELD? Light field seems to have turned into a catch-all term for many advanced camera/display technologies. WHAT IS A LIGHT FIELD?
AN O(N 2 LOG(N)) PER PLANE FAST DISCRETE FOCAL STACK TRANSFORM
) PER PLANE FAST DISCRETE FOCAL STACK TRANSFORM") AN O(N 2 LOG(N)) PER PLANE FAST DISCRETE FOCAL STACK TRANSFORM Fernando Pérez Nava +, Jonás Philipp Lüke + Departamento de Estadística, Investigación Operativa y Computación Departamento de Física Fundamental
AN O(N 2 LOG(N)) PER PLANE FAST DISCRETE FOCAL STACK TRANSFORM Fernando Pérez Nava +, Jonás Philipp Lüke + Departamento de Estadística, Investigación Operativa y Computación Departamento de Física Fundamental
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India
 A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
Light. Properties of light. What is light? Today What is light? How do we measure it? How does light propagate? How does light interact with matter?
 Light Properties of light Today What is light? How do we measure it? How does light propagate? How does light interact with matter? by Ted Adelson Readings Andrew Glassner, Principles of Digital Image
Light Properties of light Today What is light? How do we measure it? How does light propagate? How does light interact with matter? by Ted Adelson Readings Andrew Glassner, Principles of Digital Image
Hybrid Rendering for Collaborative, Immersive Virtual Environments
 Hybrid Rendering for Collaborative, Immersive Virtual Environments Stephan Würmlin wuermlin@inf.ethz.ch Outline! Rendering techniques GBR, IBR and HR! From images to models! Novel view generation! Putting
Hybrid Rendering for Collaborative, Immersive Virtual Environments Stephan Würmlin wuermlin@inf.ethz.ch Outline! Rendering techniques GBR, IBR and HR! From images to models! Novel view generation! Putting
Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images
 Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images Abstract This paper presents a new method to generate and present arbitrarily
Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images Abstract This paper presents a new method to generate and present arbitrarily
Radiance Photography. Todor Georgiev Adobe Systems. Andrew Lumsdaine Indiana University
 Radiance Photography Todor Georgiev Adobe Systems Andrew Lumsdaine Indiana University Course Goals Overview of radiance (aka lightfield) photography Mathematical treatment of theory and computation Hands
Radiance Photography Todor Georgiev Adobe Systems Andrew Lumsdaine Indiana University Course Goals Overview of radiance (aka lightfield) photography Mathematical treatment of theory and computation Hands
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Coding and Modulation in Cameras
 Mitsubishi Electric Research Laboratories Raskar 2007 Coding and Modulation in Cameras Ramesh Raskar with Ashok Veeraraghavan, Amit Agrawal, Jack Tumblin, Ankit Mohan Mitsubishi Electric Research Labs
Mitsubishi Electric Research Laboratories Raskar 2007 Coding and Modulation in Cameras Ramesh Raskar with Ashok Veeraraghavan, Amit Agrawal, Jack Tumblin, Ankit Mohan Mitsubishi Electric Research Labs
DEPTH AND ANGULAR RESOLUTION IN PLENOPTIC CAMERAS. M. Damghanian, R. Olsson, M. Sjöström
 This material is published in the open archive of Mid Sweden University DIVA http://miun.diva-portal.org to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein
This material is published in the open archive of Mid Sweden University DIVA http://miun.diva-portal.org to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein
Introduction to Computer Vision. Introduction CMPSCI 591A/691A CMPSCI 570/670. Image Formation
 Introduction CMPSCI 591A/691A CMPSCI 570/670 Image Formation Lecture Outline Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic
Introduction CMPSCI 591A/691A CMPSCI 570/670 Image Formation Lecture Outline Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic
Image Based Rendering. D.A. Forsyth, with slides from John Hart
 Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Image Warping and Mosacing
 Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
Jingyi Yu CISC 849. Department of Computer and Information Science
 Digital Photography and Videos Jingyi Yu CISC 849 Light Fields, Lumigraph, and Image-based Rendering Pinhole Camera A camera captures a set of rays A pinhole camera captures a set of rays passing through
Digital Photography and Videos Jingyi Yu CISC 849 Light Fields, Lumigraph, and Image-based Rendering Pinhole Camera A camera captures a set of rays A pinhole camera captures a set of rays passing through
Optimizing an Inverse Warper
 Optimizing an Inverse Warper by Robert W. Marcato, Jr. Submitted to the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degrees of Bachelor
Optimizing an Inverse Warper by Robert W. Marcato, Jr. Submitted to the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degrees of Bachelor
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Real Time Rendering. CS 563 Advanced Topics in Computer Graphics. Songxiang Gu Jan, 31, 2005
 Real Time Rendering CS 563 Advanced Topics in Computer Graphics Songxiang Gu Jan, 31, 2005 Introduction Polygon based rendering Phong modeling Texture mapping Opengl, Directx Point based rendering VTK
Real Time Rendering CS 563 Advanced Topics in Computer Graphics Songxiang Gu Jan, 31, 2005 Introduction Polygon based rendering Phong modeling Texture mapping Opengl, Directx Point based rendering VTK
Consider a partially transparent object that is illuminated with two lights, one visible from each side of the object. Start with a ray from the eye
 Ray Tracing What was the rendering equation? Motivate & list the terms. Relate the rendering equation to forward ray tracing. Why is forward ray tracing not good for image formation? What is the difference
Ray Tracing What was the rendering equation? Motivate & list the terms. Relate the rendering equation to forward ray tracing. Why is forward ray tracing not good for image formation? What is the difference
Ligh%ng and Reflectance
 Ligh%ng and Reflectance 2 3 4 Ligh%ng Ligh%ng can have a big effect on how an object looks. Modeling the effect of ligh%ng can be used for: Recogni%on par%cularly face recogni%on Shape reconstruc%on Mo%on
Ligh%ng and Reflectance 2 3 4 Ligh%ng Ligh%ng can have a big effect on how an object looks. Modeling the effect of ligh%ng can be used for: Recogni%on par%cularly face recogni%on Shape reconstruc%on Mo%on
Measuring Light: Radiometry and Cameras
 Lecture 11: Measuring Light: Radiometry and Cameras Computer Graphics CMU 15-462/15-662, Fall 2015 Slides credit: a majority of these slides were created by Matt Pharr and Pat Hanrahan Simulating a pinhole
Lecture 11: Measuring Light: Radiometry and Cameras Computer Graphics CMU 15-462/15-662, Fall 2015 Slides credit: a majority of these slides were created by Matt Pharr and Pat Hanrahan Simulating a pinhole
Epipolar Geometry CSE P576. Dr. Matthew Brown
 Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Title: The Future of Photography is Computational Photography. Subtitle: 100 years after invention, Integral Photography becomes feasible
 Title: The Future of Photography is Computational Photography Subtitle: 100 years after invention, Integral Photography becomes feasible Adobe customers are creative and demanding. They expect to use our
Title: The Future of Photography is Computational Photography Subtitle: 100 years after invention, Integral Photography becomes feasible Adobe customers are creative and demanding. They expect to use our
Geometry of Multiple views
 1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
Computational Methods for Radiance. Render the full variety offered by the direct observation of objects. (Computationally).
.") Computational Methods for Radiance Render the full variety offered by the direct observation of objects. (Computationally). Methods for Plenoptic 1.0 Computing with Radiance Goal: Render the full variety
Computational Methods for Radiance Render the full variety offered by the direct observation of objects. (Computationally). Methods for Plenoptic 1.0 Computing with Radiance Goal: Render the full variety
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
Rectification and Disparity
 Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
The 7d plenoptic function, indexing all light.
 Previous Lecture The 7d plenoptic function, indexing all light. Lightfields: a 4d (not 5d!) data structure which captures all outgoing light from a region and permits reconstruction of arbitrary synthetic
Previous Lecture The 7d plenoptic function, indexing all light. Lightfields: a 4d (not 5d!) data structure which captures all outgoing light from a region and permits reconstruction of arbitrary synthetic
IMAGE-BASED RENDERING TECHNIQUES FOR APPLICATION IN VIRTUAL ENVIRONMENTS
 IMAGE-BASED RENDERING TECHNIQUES FOR APPLICATION IN VIRTUAL ENVIRONMENTS Xiaoyong Sun A Thesis submitted to the Faculty of Graduate and Postdoctoral Studies in partial fulfillment of the requirements for
IMAGE-BASED RENDERING TECHNIQUES FOR APPLICATION IN VIRTUAL ENVIRONMENTS Xiaoyong Sun A Thesis submitted to the Faculty of Graduate and Postdoctoral Studies in partial fulfillment of the requirements for
Dense Lightfield Disparity Estimation using Total Variation Regularization
 Dense Lightfield Disparity Estimation using Total Variation Regularization Nuno Barroso Monteiro 1,2, João Pedro Barreto 2, and José Gaspar 1 1 Institute for Systems and Robotics, Univ. of Lisbon, Portugal
Dense Lightfield Disparity Estimation using Total Variation Regularization Nuno Barroso Monteiro 1,2, João Pedro Barreto 2, and José Gaspar 1 1 Institute for Systems and Robotics, Univ. of Lisbon, Portugal
Computational Photography
 End of Semester is the last lecture of new material Quiz on Friday 4/30 Sample problems are posted on website Computational Photography Final Project Presentations Wednesday May 12 1-5pm, CII 4040 Attendance
End of Semester is the last lecture of new material Quiz on Friday 4/30 Sample problems are posted on website Computational Photography Final Project Presentations Wednesday May 12 1-5pm, CII 4040 Attendance
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 30: Light, color, and reflectance Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties of light
CS4670: Computer Vision Noah Snavely Lecture 30: Light, color, and reflectance Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties of light
An Approach on Hardware Design for Computationally Intensive Image Processing Applications based on Light Field Refocusing Algorithm
 An Approach on Hardware Design for Computationally Intensive Image Processing Applications based on Light Field Refocusing Algorithm Jiayuan Meng, Dee A.B. Weikle, Greg Humphreys, Kevin Skadron Dept. of
An Approach on Hardware Design for Computationally Intensive Image Processing Applications based on Light Field Refocusing Algorithm Jiayuan Meng, Dee A.B. Weikle, Greg Humphreys, Kevin Skadron Dept. of
Computational Photography
 Computational Photography Photography and Imaging Michael S. Brown Brown - 1 Part 1 Overview Photography Preliminaries Traditional Film Imaging (Camera) Part 2 General Imaging 5D Plenoptic Function (McMillan)
Computational Photography Photography and Imaging Michael S. Brown Brown - 1 Part 1 Overview Photography Preliminaries Traditional Film Imaging (Camera) Part 2 General Imaging 5D Plenoptic Function (McMillan)
(0, 1, 1) (0, 1, 1) (0, 1, 0) What is light? What is color? Terminology
 (0, 1, 1) (0, 1, 0) What is light? What is color? Terminology") lecture 23 (0, 1, 1) (0, 0, 0) (0, 0, 1) (0, 1, 1) (1, 1, 1) (1, 1, 0) (0, 1, 0) hue - which ''? saturation - how pure? luminance (value) - intensity What is light? What is? Light consists of electromagnetic
lecture 23 (0, 1, 1) (0, 0, 0) (0, 0, 1) (0, 1, 1) (1, 1, 1) (1, 1, 0) (0, 1, 0) hue - which ''? saturation - how pure? luminance (value) - intensity What is light? What is? Light consists of electromagnetic
Re-live the Movie Matrix : From Harry Nyquist to Image-Based Rendering. Tsuhan Chen Carnegie Mellon University Pittsburgh, USA
 Re-live the Movie Matrix : From Harry Nyquist to Image-Based Rendering Tsuhan Chen tsuhan@cmu.edu Carnegie Mellon University Pittsburgh, USA Some History IEEE Multimedia Signal Processing (MMSP) Technical
Re-live the Movie Matrix : From Harry Nyquist to Image-Based Rendering Tsuhan Chen tsuhan@cmu.edu Carnegie Mellon University Pittsburgh, USA Some History IEEE Multimedia Signal Processing (MMSP) Technical
CSc Topics in Computer Graphics 3D Photography
 CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
Lecture 15: Image-Based Rendering and the Light Field. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
DEPTH, STEREO AND FOCUS WITH LIGHT-FIELD CAMERAS
 DEPTH, STEREO AND FOCUS WITH LIGHT-FIELD CAMERAS CINEC 2014 Frederik Zilly, Head of Group Computational Imaging & Algorithms Moving Picture Technologies Department, Fraunhofer IIS Fraunhofer, Frederik
DEPTH, STEREO AND FOCUS WITH LIGHT-FIELD CAMERAS CINEC 2014 Frederik Zilly, Head of Group Computational Imaging & Algorithms Moving Picture Technologies Department, Fraunhofer IIS Fraunhofer, Frederik
Linearizing the Plenoptic Space
 Linearizing the Plenoptic Space Grégoire Nieto1, Frédéric Devernay1, James Crowley2 LJK, Université Grenoble Alpes, France 2 LIG, Université Grenoble Alpes, France 1 1 Goal: synthesize a new view Capture/sample
Linearizing the Plenoptic Space Grégoire Nieto1, Frédéric Devernay1, James Crowley2 LJK, Université Grenoble Alpes, France 2 LIG, Université Grenoble Alpes, France 1 1 Goal: synthesize a new view Capture/sample
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 20: Light, reflectance and photometric stereo Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties
CS6670: Computer Vision Noah Snavely Lecture 20: Light, reflectance and photometric stereo Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties
The Effect of Grid Resolution on the Accuracy of Tomographic Reconstruction Using a Plenoptic Camera
 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition 7-1 January 13, Grapevine (Dallas/Ft. Worth Region), Texas AIAA 13-39 The Effect of Grid Resolution on the
51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition 7-1 January 13, Grapevine (Dallas/Ft. Worth Region), Texas AIAA 13-39 The Effect of Grid Resolution on the
More Mosaic Madness. CS194: Image Manipulation & Computational Photography. Steve Seitz and Rick Szeliski. Jeffrey Martin (jeffrey-martin.
 More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
3D Particle Position Reconstruction Accuracy in Plenoptic PIV
 AIAA SciTech 13-17 January 2014, National Harbor, Maryland 52nd Aerospace Sciences Meeting AIAA 2014-0398 3D Particle Position Reconstruction Accuracy in Plenoptic PIV Timothy W. Fahringer and Brian S.
AIAA SciTech 13-17 January 2014, National Harbor, Maryland 52nd Aerospace Sciences Meeting AIAA 2014-0398 3D Particle Position Reconstruction Accuracy in Plenoptic PIV Timothy W. Fahringer and Brian S.
A million pixels, a million polygons. Which is heavier? François X. Sillion. imagis* Grenoble, France
 A million pixels, a million polygons. Which is heavier? François X. Sillion imagis* Grenoble, France *A joint research project of CNRS, INRIA, INPG and UJF MAGIS Why this question? Evolution of processing
A million pixels, a million polygons. Which is heavier? François X. Sillion imagis* Grenoble, France *A joint research project of CNRS, INRIA, INPG and UJF MAGIS Why this question? Evolution of processing
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Computational Cameras: Exploiting Spatial- Angular Temporal Tradeoffs in Photography
 Mitsubishi Electric Research Labs (MERL) Computational Cameras Computational Cameras: Exploiting Spatial- Angular Temporal Tradeoffs in Photography Amit Agrawal Mitsubishi Electric Research Labs (MERL)
Mitsubishi Electric Research Labs (MERL) Computational Cameras Computational Cameras: Exploiting Spatial- Angular Temporal Tradeoffs in Photography Amit Agrawal Mitsubishi Electric Research Labs (MERL)
Image Based Rendering
 Image Based Rendering an overview Photographs We have tools that acquire and tools that display photographs at a convincing quality level 2 1 3 4 2 5 6 3 7 8 4 9 10 5 Photographs We have tools that acquire
Image Based Rendering an overview Photographs We have tools that acquire and tools that display photographs at a convincing quality level 2 1 3 4 2 5 6 3 7 8 4 9 10 5 Photographs We have tools that acquire
A Warping-based Refinement of Lumigraphs
 A Warping-based Refinement of Lumigraphs Wolfgang Heidrich, Hartmut Schirmacher, Hendrik Kück, Hans-Peter Seidel Computer Graphics Group University of Erlangen heidrich,schirmacher,hkkueck,seidel@immd9.informatik.uni-erlangen.de
A Warping-based Refinement of Lumigraphs Wolfgang Heidrich, Hartmut Schirmacher, Hendrik Kück, Hans-Peter Seidel Computer Graphics Group University of Erlangen heidrich,schirmacher,hkkueck,seidel@immd9.informatik.uni-erlangen.de
CS 684 Fall 2005 Image-based Modeling and Rendering. Ruigang Yang
 CS 684 Fall 2005 Image-based Modeling and Rendering Ruigang Yang Administrivia Classes: Monday and Wednesday, 4:00-5:15 PM Instructor: Ruigang Yang ryang@cs.uky.edu Office Hour: Robotics 514D, MW 1500-1600
CS 684 Fall 2005 Image-based Modeling and Rendering Ruigang Yang Administrivia Classes: Monday and Wednesday, 4:00-5:15 PM Instructor: Ruigang Yang ryang@cs.uky.edu Office Hour: Robotics 514D, MW 1500-1600
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
The Light Field and Image-Based Rendering
 Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Plenoptic Cameras. Bastian Goldlücke, Oliver Klehm, Sven Wanner, and Elmar Eisemann. 5.1 Introduction
 Plenoptic Cameras Bastian Goldlücke, Oliver Klehm, Sven Wanner, and Elmar Eisemann 5.1 Introduction The light field, as defined by Gershun in 1936 [Gershun 36] describes the radiance traveling in every
Plenoptic Cameras Bastian Goldlücke, Oliver Klehm, Sven Wanner, and Elmar Eisemann 5.1 Introduction The light field, as defined by Gershun in 1936 [Gershun 36] describes the radiance traveling in every
 http://www.diva-portal.org This is the published version of a paper presented at 2018 3DTV Conference: The True Vision - Capture, Transmission and Display of 3D Video (3DTV-CON), Stockholm Helsinki Stockholm,
http://www.diva-portal.org This is the published version of a paper presented at 2018 3DTV Conference: The True Vision - Capture, Transmission and Display of 3D Video (3DTV-CON), Stockholm Helsinki Stockholm,
Advanced Image Based Rendering Techniques
 Advanced Image Based Rendering Techniques Herbert Grasberger Institute of Computergraphics & Algorithms, TU Vienna, Austria June 13, 2006 Abstract Image Based Rendering is a rendering approach based on
Advanced Image Based Rendering Techniques Herbert Grasberger Institute of Computergraphics & Algorithms, TU Vienna, Austria June 13, 2006 Abstract Image Based Rendering is a rendering approach based on
Globally Consistent Depth Labeling of 4D Light Fields
 Globally Consistent Depth Labeling of 4D Light Fields Sven Wanner and Bastian Goldluecke Heidelberg Collaboratory for Image Processing Abstract We present a novel paradigm to deal with depth reconstruction
Globally Consistent Depth Labeling of 4D Light Fields Sven Wanner and Bastian Goldluecke Heidelberg Collaboratory for Image Processing Abstract We present a novel paradigm to deal with depth reconstruction
1 (5 max) 2 (10 max) 3 (20 max) 4 (30 max) 5 (10 max) 6 (15 extra max) total (75 max + 15 extra)
 2 (10 max) 3 (20 max) 4 (30 max) 5 (10 max) 6 (15 extra max) total (75 max + 15 extra)") Mierm Exam CS223b Stanford CS223b Computer Vision, Winter 2004 Feb. 18, 2004 Full Name: Email: This exam has 7 pages. Make sure your exam is not missing any sheets, and write your name on every page. The
Mierm Exam CS223b Stanford CS223b Computer Vision, Winter 2004 Feb. 18, 2004 Full Name: Email: This exam has 7 pages. Make sure your exam is not missing any sheets, and write your name on every page. The
Image-Based Rendering and Light Fields
 CS194-13: Advanced Computer Graphics Lecture #9 Image-Based Rendering University of California Berkeley Image-Based Rendering and Light Fields Lecture #9: Wednesday, September 30th 2009 Lecturer: Ravi
CS194-13: Advanced Computer Graphics Lecture #9 Image-Based Rendering University of California Berkeley Image-Based Rendering and Light Fields Lecture #9: Wednesday, September 30th 2009 Lecturer: Ravi
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Depth Estimation with a Plenoptic Camera
 Depth Estimation with a Plenoptic Camera Steven P. Carpenter 1 Auburn University, Auburn, AL, 36849 The plenoptic camera is a tool capable of recording significantly more data concerning a particular image
Depth Estimation with a Plenoptic Camera Steven P. Carpenter 1 Auburn University, Auburn, AL, 36849 The plenoptic camera is a tool capable of recording significantly more data concerning a particular image
Understanding Variability
 Understanding Variability Why so different? Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic aberration, radial distortion
Understanding Variability Why so different? Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic aberration, radial distortion
Stereo Vision A simple system. Dr. Gerhard Roth Winter 2012
 Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Image-Based Modeling and Rendering. Image-Based Modeling and Rendering. Final projects IBMR. What we have learnt so far. What IBMR is about
 Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
CS354 Computer Graphics Ray Tracing. Qixing Huang Januray 24th 2017
 CS354 Computer Graphics Ray Tracing Qixing Huang Januray 24th 2017 Graphics Pipeline Elements of rendering Object Light Material Camera Geometric optics Modern theories of light treat it as both a wave
CS354 Computer Graphics Ray Tracing Qixing Huang Januray 24th 2017 Graphics Pipeline Elements of rendering Object Light Material Camera Geometric optics Modern theories of light treat it as both a wave
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Capturing and View-Dependent Rendering of Billboard Models
 Capturing and View-Dependent Rendering of Billboard Models Oliver Le, Anusheel Bhushan, Pablo Diaz-Gutierrez and M. Gopi Computer Graphics Lab University of California, Irvine Abstract. In this paper,
Capturing and View-Dependent Rendering of Billboard Models Oliver Le, Anusheel Bhushan, Pablo Diaz-Gutierrez and M. Gopi Computer Graphics Lab University of California, Irvine Abstract. In this paper,
AS the most important medium for people to perceive
 JOURNAL OF L A T E X CLASS FILES, VOL. XX, NO. X, OCTOBER 2017 1 Light Field Image Processing: An Overview Gaochang Wu, Belen Masia, Adrian Jarabo, Yuchen Zhang, Liangyong Wang, Qionghai Dai, Senior Member,
JOURNAL OF L A T E X CLASS FILES, VOL. XX, NO. X, OCTOBER 2017 1 Light Field Image Processing: An Overview Gaochang Wu, Belen Masia, Adrian Jarabo, Yuchen Zhang, Liangyong Wang, Qionghai Dai, Senior Member,
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Announcements. Mosaics. Image Mosaics. How to do it? Basic Procedure Take a sequence of images from the same position =
 Announcements Project 2 out today panorama signup help session at end of class Today mosaic recap blending Mosaics Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html
Announcements Project 2 out today panorama signup help session at end of class Today mosaic recap blending Mosaics Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html
Multi-View Stereo for Static and Dynamic Scenes
 Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
TREE-STRUCTURED ALGORITHM FOR EFFICIENT SHEARLET-DOMAIN LIGHT FIELD RECONSTRUCTION. Suren Vagharshakyan, Robert Bregovic, Atanas Gotchev
 TREE-STRUCTURED ALGORITHM FOR EFFICIENT SHEARLET-DOMAIN LIGHT FIELD RECONSTRUCTION Suren Vagharshakyan, Robert Bregovic, Atanas Gotchev Department of Signal Processing, Tampere University of Technology,
TREE-STRUCTURED ALGORITHM FOR EFFICIENT SHEARLET-DOMAIN LIGHT FIELD RECONSTRUCTION Suren Vagharshakyan, Robert Bregovic, Atanas Gotchev Department of Signal Processing, Tampere University of Technology,
CS201 Computer Vision Lect 4 - Image Formation
 CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections