Cloth Hair. and. soft bodies
|
|
|
- Cynthia Houston
- 5 years ago
- Views:
Transcription

1 Cloth Hair Lesson 11 and soft bodies
2 Lesson 08 Outline Problem definition and motivations Modeling deformable solids with mass-spring model Position based dynamics Modeling cloths with mass-spring model Modeling hair with mass-spring model Demos / tools / libs
3 Simulation of Deformable Solids Lagrangian Mesh Based Methods Continuum Mechanics Based Methods Mass-Spring Systems Lagrangian Mesh Free Methods Loosely Coupled Particle Systems Smoothed Particle Hydrodynamics (SPH) Mesh Free Methods for the solution of PDEs Reduced Deformation Models and Modal Analysis Eulerian and Semi-Lagrangian Methods Fluids and Gases Melting Objects

4 Mass-spring Model
5 Mass-spring Model Each deformable solid is modeled as a graph (mesh) of particles (with mass) connected with mass-less springs Particle Model Each particle is defined at least by its Mass (mi), Position (pi), Velocity (vi) Additionally there can be force, acceleration, momentum Usually particles can be incident to any number of springs Spring Model Springs usually connects 2 particles and exerts force on them Usually sprigs have non-zero rest length and some constant material properties
6 Hook's Spring Model Hook's Law: Strain is directly proportional to stress Formally: f = - ks x x is the displacement of the end of the spring from its equilibrium position f is the restoring force exerted by the material k is a material constant called spring stiffness s Using rest length and velocity damping f = - [ks( l l0) + kd(va - vb)/ l ] (l/ l ) kd is damping factor a l0 x = l - l0 f = - ks x b

7 Position based Dynamics
8 Position based Dynamics Traditional force based dynamics must solve ODE using some integration scheme. Using simple and fast explicit methods can lead simulation to inaccuracy and instability This can be prevented by solving large systems of equations (using implicit methods) or Using more geometric approach by directly modify positions into stable and more accurate states. Such approach (position based dynamics) gives more control over animation and easily models constraints.
9 Position based Dynamics Object Representation We represent dynamic object with a set N vertices Each vertex has: Mass (m ), Position (p ), velocity (v ) i i i Constraint Representation Let p = (p1,, pn) be the generalized position The constraint is a functions Cj(p) = Cj(p1,, pn): R3N R Cardinality mj is the number of used parameters Stiffness parameter kj {0 1} is a material property We define equality (bilateral) constraint as: Cj(p) = 0 We define inequality (unilateral) constraint as: Cj(p) 0
10 PBD: Algorithm 1: forall vertices i: initialize pi = pi0; vi = vi0; wi = 1/mi 2: loop 3: forall vertices i do { vi vi + Δt wi fext(xi) } 4: DampVelocities(v1,, vn) 5: forall vertices i do { qi pi + Δt vi } 6: forall vertices i do { CreateCollisionConstraints(xi pi) } 7: loop ns times { ProjectConstraints(C1,, CM+Q, q1,, qn) } 8: forall vertices I do { vi (qi pi)/δt; pi qi; } 9: VelocityUpdate(v1,, vn) 10: endloop
11 PBD: Algorithm First all masses, positions and velocities are initialized to rest state With each simulation frame we do First we modify velocities due to external forces (3:) Next we add artificial damping to the system (4:) Then we predict new positions (q ) with simple Euler step (5:) i Next we detect and construct all collision constraints (6:) We apply projection several times on all constraints (7:) We find correct velocities and set projected positions (8:) We apply friction and restitution impulses on velocities (9:)
12 PBD: Constraint Projection Assuming constraint is violated ie. C(p)!= 0 (<0) we must find correction Δp such that C(p + Δp) = 0 ( 0) By linearization we get: C(p+Δp) C(p) + pc(p) Δp To conserve both momentums correction must be along direction of constraint function gradient pc(p) ie: Δp = λ pc(p); λ (Lagrange multiplier) is a scalar λ = - C(p) / pc(p) 2f For i-th particle with mass mi (wi = 1/mi) Δpi = λ wi pc(p1,, pn) λ = - wi C(p1,, pn) / jwj pjc(p1,, pn) 2
13 PBD: Distance Constraint Let C(p) = C(p1, p2) = p1 p2 - d = 0 p1c(p1, p2) = (p1 p2)/ p1 p2 p2c(p1, p2) = (p1 p2)/ p1 p2 λ = ( p1 p2 - d) / w1 + w2 Δp1 = (w1 / (w1 + w2))( p1 p2 - d)(p1 p2)/ p1 p2 Δp2 = (w2 / (w1 + w2))( p1 p2 - d)(p1 p2)/ p1 p2 where w1 = 1/m1 and w2 = 1/m2 For equality constraints we always do projection For Inequality we project only when C(p) < 0 Finally we multiply Δp with stiffness k ( Δpk ) Due to iterations use k' = 1 (1 k)1/ns. Stiffness is applied linearly after ns iterations
14 PBD: Collisions Given old position pi and predicted position qi we detect if a ray (pi, qi) enters some object. If yes we compute entry point qc and collision normal nc Next add collision constraint with stiffness k = 1 C(p) = (p qc) nc 0 (ensures non-penetration) When scene contains more dynamic bodies we must provide constraint from all bodies into one scene solver For triangle meshes with face (p, p, p ): n = (p - p ) x (p - p ) c Collision constraint generation is done outside the solver loop, to speed up simulation. Artifacts are negligible
15 PBD: Damping Velocities are damped forall vertices i Global body variables pcm = ( i pi mi)/( i mi) Δvi = vcm + ω x ri - vi vcm = ( i vi mi)/( i mi) vi vi + kdδvi L = iri x (mivi) J = i(rxi)(rxi)t mi endfor Δvi only damps local deviations Here vcm + ω x ri is the velocity due to global body motion ω = J-1 L r = p pi i cm rxi is cross product matrix
16 Position based Dynamics - Summary Control over explicit integration with no typical instability problems Positions of vertices and objects parts can directly be manipulated during the simulation Simple handling of general constraints in the position based setting The explicit position based solver is easy to understand and implement.

17 Modeling Cloth
18 Cloth: Representation Cloth is represented with arbitrary manifold triangular mesh (no need for regular lattice) Each mesh vertex become a simulation particle Given cloth density and thickness we calculate mass of each triangle. Mass of each particle is sum of 1/3 of the mass of each adjacent triangle. Constraints are defined along edges and faces Cloth tearing is performed on vertices with large deformations
19 Cloth: Constraints Stretching Constraints Along each mesh edge we define fixed stretching constraint as simple equality distance constraint (spring) C (p, p ) = p p l where l0 is rest length s Stiffness ks is usually higher to overcome springiness Bending Constraints For each pair of adjacent triangles (p1, p3, p2) and (p1, p2, p4) we define a bending constraint C (p, p, p, p )= acos(n, n ) φ where b p2 n1 n1 = ((p2 - p1) x (p3 - p1)) / (p2 - p1) x (p3 p1) n2 = ((p2 - p1) x (p4 - p1)) / (p2 - p1) x (p4 p1) p4 p1 p3 n2
20 Cloth: Collisions and Tearing Inequality collision constraints is defined as Cb(q, p1, p2, p3) = (q p1) n h q is collided point with face (p1, p2, p3) n is face normal h distance to the face. Collision with rigid body exerts impulse mipi/δt at pi More involved self-collision detection must be done cloth becomes to be tangled
21 Cloth: Overpressure and Tear Overpressure inside the closed mesh is modeled as C(p1,, pn) = j(pj1 x pj2) pj3 kpv0 p1c = j(pj2 x pj3) + j(pj3 x pj1) + j(pj1 x pj2) Cloth Tearing Process Whenever the stretching of an edge exceeds a specified threshold value, we select one of the edge s adjacent vertices We then put a split plane through that vertex perpendicular to the edge direction and split the vertex into 2 new vertices All triangles above the split plane are assigned to the original vertex while all triangles below are assigned to the duplicate
 (ks; kb) = (1; 0) (ks; kb) = (0.5; 0) (ks; kb) = (0.")
22 Cloth: Stiffness and Bending (ks; kb) = (1; 1) (ks; kb) = (0.5; 1) (ks; kb) = (1; 0) (ks; kb) = (0.5; 0) (ks; kb) = (0.01; 1) (ks; kb) = (0.01; 0)


23 Cloth: Self Collisions and Balloons


24 Cloth: Examples

25 Modeling Hair
26 Hair: Representation Each hair strand is modeled as a set of vertices connected by edges into series of line segments Each vertex is used as simulation particle Given material density and strand thickness we can calculate volume/mass of each segment. Particle mass is average of incident edge masses Strand constraints are applied along edges, additional (virtual) edges and newly created particles Hair tearing is performed on vertices with large deformations
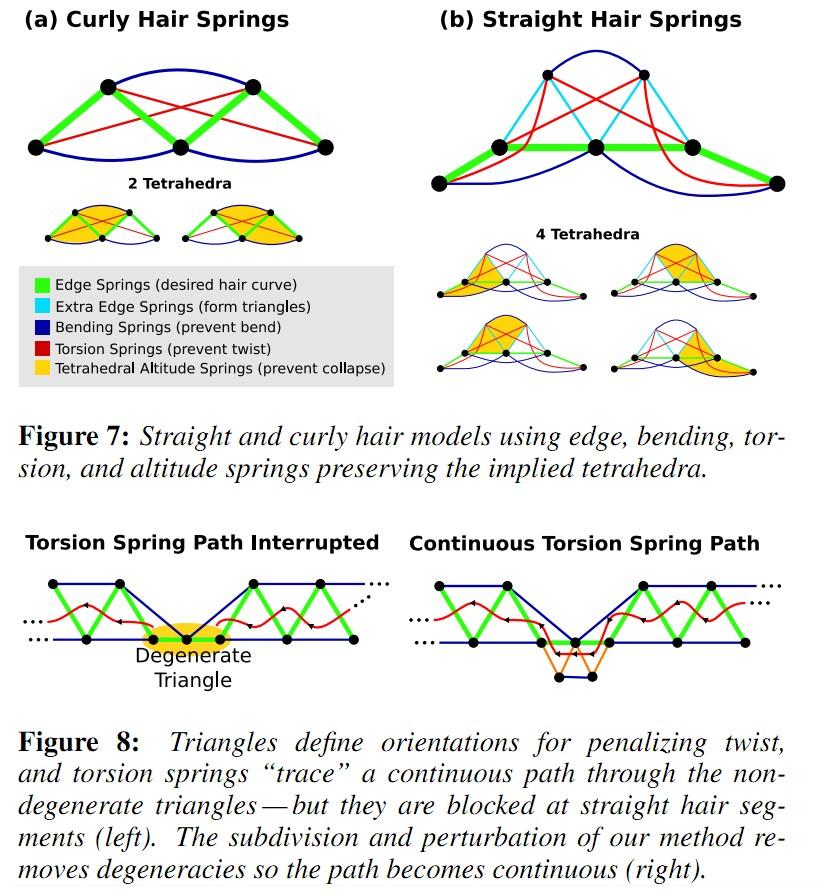
27 Hair: Constraints We model Curly Hair and Straight Hair Stretching Constraints (springs) Linear springs between every consecutive particle Bending Constraints (springs) Linear springs between every other particle The edge springs and bending springs together form triangles that implicitly represent the orientation of the hair Torsion Constraints (springs) Twist is modeled by attaching torsion springs that connect each particle to a particle three particles away from it Altitude Constraints (springs) See figure
28
29 Hair: Altitude Springs Point/Face Altitude Springs Perpendicular to the face starting from the given point Length is l = 6V/ u x v where u and v are the vectors of the base triangle and V is the signed volume of the tetrahedron Edge/Edge Altitude Springs Perpendicular to common spring and bending spring Length is l = 6V/ u x v where u and v are the stretch and bend spring and V is the signed volume of the tetrahedron For any tetrahedron, the edge/edge or point/face spring with minimal length is guaranteed to have all non-negative barycentric weights, preventing unbounded forces
30

31 Hair: Linear Strands

32 Hair: Curly Strands

33 The End
T6: Position-Based Simulation Methods in Computer Graphics. Jan Bender Miles Macklin Matthias Müller
 T6: Position-Based Simulation Methods in Computer Graphics Jan Bender Miles Macklin Matthias Müller Jan Bender Organizer Professor at the Visual Computing Institute at Aachen University Research topics
T6: Position-Based Simulation Methods in Computer Graphics Jan Bender Miles Macklin Matthias Müller Jan Bender Organizer Professor at the Visual Computing Institute at Aachen University Research topics
Shape of Things to Come: Next-Gen Physics Deep Dive
 Shape of Things to Come: Next-Gen Physics Deep Dive Jean Pierre Bordes NVIDIA Corporation Free PhysX on CUDA PhysX by NVIDIA since March 2008 PhysX on CUDA available: August 2008 GPU PhysX in Games Physical
Shape of Things to Come: Next-Gen Physics Deep Dive Jean Pierre Bordes NVIDIA Corporation Free PhysX on CUDA PhysX by NVIDIA since March 2008 PhysX on CUDA available: August 2008 GPU PhysX in Games Physical
Simulation in Computer Graphics. Deformable Objects. Matthias Teschner. Computer Science Department University of Freiburg
 Simulation in Computer Graphics Deformable Objects Matthias Teschner Computer Science Department University of Freiburg Outline introduction forces performance collision handling visualization University
Simulation in Computer Graphics Deformable Objects Matthias Teschner Computer Science Department University of Freiburg Outline introduction forces performance collision handling visualization University
2.7 Cloth Animation. Jacobs University Visualization and Computer Graphics Lab : Advanced Graphics - Chapter 2 123
 2.7 Cloth Animation 320491: Advanced Graphics - Chapter 2 123 Example: Cloth draping Image Michael Kass 320491: Advanced Graphics - Chapter 2 124 Cloth using mass-spring model Network of masses and springs
2.7 Cloth Animation 320491: Advanced Graphics - Chapter 2 123 Example: Cloth draping Image Michael Kass 320491: Advanced Graphics - Chapter 2 124 Cloth using mass-spring model Network of masses and springs
PHYSICALLY BASED ANIMATION
 PHYSICALLY BASED ANIMATION CS148 Introduction to Computer Graphics and Imaging David Hyde August 2 nd, 2016 WHAT IS PHYSICS? the study of everything? WHAT IS COMPUTATION? the study of everything? OUTLINE
PHYSICALLY BASED ANIMATION CS148 Introduction to Computer Graphics and Imaging David Hyde August 2 nd, 2016 WHAT IS PHYSICS? the study of everything? WHAT IS COMPUTATION? the study of everything? OUTLINE
Cloth Simulation. COMP 768 Presentation Zhen Wei
 Cloth Simulation COMP 768 Presentation Zhen Wei Outline Motivation and Application Cloth Simulation Methods Physically-based Cloth Simulation Overview Development References 2 Motivation Movies Games VR
Cloth Simulation COMP 768 Presentation Zhen Wei Outline Motivation and Application Cloth Simulation Methods Physically-based Cloth Simulation Overview Development References 2 Motivation Movies Games VR
Introduction to Computer Graphics. Animation (2) May 26, 2016 Kenshi Takayama
 May 26, 2016 Kenshi Takayama") Introduction to Computer Graphics Animation (2) May 26, 2016 Kenshi Takayama Physically-based deformations 2 Simple example: single mass & spring in 1D Mass m, position x, spring coefficient k, rest length
Introduction to Computer Graphics Animation (2) May 26, 2016 Kenshi Takayama Physically-based deformations 2 Simple example: single mass & spring in 1D Mass m, position x, spring coefficient k, rest length
Cloth and Hair Collisions
 algorithm (presented in Section IV-C.2), by using the recent capabilities of GPUs. Koster et al. [78] exploited graphics hardware by storing all the opacity maps in a 3D texture, to have the hair self-shadow
algorithm (presented in Section IV-C.2), by using the recent capabilities of GPUs. Koster et al. [78] exploited graphics hardware by storing all the opacity maps in a 3D texture, to have the hair self-shadow
Mass-Spring Systems. Last Time?
 Mass-Spring Systems Last Time? Implicit Surfaces & Marching Cubes/Tetras Collision Detection & Conservative Bounding Regions Spatial Acceleration Data Structures Octree, k-d tree, BSF tree 1 Today Particle
Mass-Spring Systems Last Time? Implicit Surfaces & Marching Cubes/Tetras Collision Detection & Conservative Bounding Regions Spatial Acceleration Data Structures Octree, k-d tree, BSF tree 1 Today Particle
Co-rotational Finite Element Solid Simulation with Collisions. Patrick Riordan
 Co-rotational Finite Element Solid Simulation with Collisions Patrick Riordan 2015-12-11 Contents 1 Introduction 2 Continuum Mechanics 2.1 Stress and Strain........................... 2.2 Deformation Gradient........................
Co-rotational Finite Element Solid Simulation with Collisions Patrick Riordan 2015-12-11 Contents 1 Introduction 2 Continuum Mechanics 2.1 Stress and Strain........................... 2.2 Deformation Gradient........................
Interaction of Fluid Simulation Based on PhysX Physics Engine. Huibai Wang, Jianfei Wan, Fengquan Zhang
 4th International Conference on Sensors, Measurement and Intelligent Materials (ICSMIM 2015) Interaction of Fluid Simulation Based on PhysX Physics Engine Huibai Wang, Jianfei Wan, Fengquan Zhang College
4th International Conference on Sensors, Measurement and Intelligent Materials (ICSMIM 2015) Interaction of Fluid Simulation Based on PhysX Physics Engine Huibai Wang, Jianfei Wan, Fengquan Zhang College
Physically Based Simulation
 CSCI 480 Computer Graphics Lecture 21 Physically Based Simulation April 11, 2011 Jernej Barbic University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s11/ Examples Particle Systems Numerical
CSCI 480 Computer Graphics Lecture 21 Physically Based Simulation April 11, 2011 Jernej Barbic University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s11/ Examples Particle Systems Numerical
Physically Based Simulation
 CSCI 420 Computer Graphics Lecture 21 Physically Based Simulation Examples Particle Systems Numerical Integration Cloth Simulation [Angel Ch. 9] Jernej Barbic University of Southern California 1 Physics
CSCI 420 Computer Graphics Lecture 21 Physically Based Simulation Examples Particle Systems Numerical Integration Cloth Simulation [Angel Ch. 9] Jernej Barbic University of Southern California 1 Physics
Simulation in Computer Graphics. Particles. Matthias Teschner. Computer Science Department University of Freiburg
 Simulation in Computer Graphics Particles Matthias Teschner Computer Science Department University of Freiburg Outline introduction particle motion finite differences system of first order ODEs second
Simulation in Computer Graphics Particles Matthias Teschner Computer Science Department University of Freiburg Outline introduction particle motion finite differences system of first order ODEs second
CS 231. Deformation simulation (and faces)
") CS 231 Deformation simulation (and faces) 1 Cloth Simulation deformable surface model Represent cloth model as a triangular or rectangular grid Points of finite mass as vertices Forces or energies of points
CS 231 Deformation simulation (and faces) 1 Cloth Simulation deformable surface model Represent cloth model as a triangular or rectangular grid Points of finite mass as vertices Forces or energies of points
Cloth Simulation. Tanja Munz. Master of Science Computer Animation and Visual Effects. CGI Techniques Report
 Cloth Simulation CGI Techniques Report Tanja Munz Master of Science Computer Animation and Visual Effects 21st November, 2014 Abstract Cloth simulation is a wide and popular area of research. First papers
Cloth Simulation CGI Techniques Report Tanja Munz Master of Science Computer Animation and Visual Effects 21st November, 2014 Abstract Cloth simulation is a wide and popular area of research. First papers
Simulation of curly hair
 Computer Generated Imagery Techniques Assignment Report May 2013 Simulation of curly hair student ID : i7266699 student name : Fabio student surname : Turchet 1. Introduction For my assignment I implemented
Computer Generated Imagery Techniques Assignment Report May 2013 Simulation of curly hair student ID : i7266699 student name : Fabio student surname : Turchet 1. Introduction For my assignment I implemented
Cloth Animation with Collision Detection
 Cloth Animation with Collision Detection Mara Guimarães da Silva Figure 1: Cloth blowing in the wind. Abstract This document reports the techniques and steps used to implemented a physically based animation
Cloth Animation with Collision Detection Mara Guimarães da Silva Figure 1: Cloth blowing in the wind. Abstract This document reports the techniques and steps used to implemented a physically based animation
Support for Multi physics in Chrono
 Support for Multi physics in Chrono The Story Ahead Overview of multi physics strategy in Chrono Summary of handling rigid/flexible body dynamics using Lagrangian approach Summary of handling fluid, and
Support for Multi physics in Chrono The Story Ahead Overview of multi physics strategy in Chrono Summary of handling rigid/flexible body dynamics using Lagrangian approach Summary of handling fluid, and
The jello cube. Undeformed cube. Deformed cube
 The Jello Cube Assignment 1, CSCI 520 Jernej Barbic, USC Undeformed cube The jello cube Deformed cube The jello cube is elastic, Can be bent, stretched, squeezed,, Without external forces, it eventually
The Jello Cube Assignment 1, CSCI 520 Jernej Barbic, USC Undeformed cube The jello cube Deformed cube The jello cube is elastic, Can be bent, stretched, squeezed,, Without external forces, it eventually
QP-Collide: A New Approach to Collision Treatment
 QP-Collide: A New Approach to Collision Treatment Laks Raghupathi François Faure Co-encadre par Marie-Paule CANI EVASION/GRAVIR INRIA Rhône-Alpes, Grenoble Teaser Video Classical Physical Simulation Advance
QP-Collide: A New Approach to Collision Treatment Laks Raghupathi François Faure Co-encadre par Marie-Paule CANI EVASION/GRAVIR INRIA Rhône-Alpes, Grenoble Teaser Video Classical Physical Simulation Advance
2.11 Particle Systems
 2.11 Particle Systems 320491: Advanced Graphics - Chapter 2 152 Particle Systems Lagrangian method not mesh-based set of particles to model time-dependent phenomena such as snow fire smoke 320491: Advanced
2.11 Particle Systems 320491: Advanced Graphics - Chapter 2 152 Particle Systems Lagrangian method not mesh-based set of particles to model time-dependent phenomena such as snow fire smoke 320491: Advanced
Modeling Cloth Using Mass Spring Systems
 Modeling Cloth Using Mass Spring Systems Corey O Connor Keith Stevens May 2, 2003 Abstract We set out to model cloth using a connected mesh of springs and point masses. After successfully implementing
Modeling Cloth Using Mass Spring Systems Corey O Connor Keith Stevens May 2, 2003 Abstract We set out to model cloth using a connected mesh of springs and point masses. After successfully implementing
Topics in Computer Animation
 Topics in Computer Animation Animation Techniques Artist Driven animation The artist draws some frames (keyframing) Usually in 2D The computer generates intermediate frames using interpolation The old
Topics in Computer Animation Animation Techniques Artist Driven animation The artist draws some frames (keyframing) Usually in 2D The computer generates intermediate frames using interpolation The old
Auto Injector Syringe. A Fluent Dynamic Mesh 1DOF Tutorial
 Auto Injector Syringe A Fluent Dynamic Mesh 1DOF Tutorial 1 2015 ANSYS, Inc. June 26, 2015 Prerequisites This tutorial is written with the assumption that You have attended the Introduction to ANSYS Fluent
Auto Injector Syringe A Fluent Dynamic Mesh 1DOF Tutorial 1 2015 ANSYS, Inc. June 26, 2015 Prerequisites This tutorial is written with the assumption that You have attended the Introduction to ANSYS Fluent
The Jello Cube Assignment 1, CSCI 520. Jernej Barbic, USC
 The Jello Cube Assignment 1, CSCI 520 Jernej Barbic, USC 1 The jello cube Undeformed cube Deformed cube The jello cube is elastic, Can be bent, stretched, squeezed,, Without external forces, it eventually
The Jello Cube Assignment 1, CSCI 520 Jernej Barbic, USC 1 The jello cube Undeformed cube Deformed cube The jello cube is elastic, Can be bent, stretched, squeezed,, Without external forces, it eventually
Meshless Modeling, Animating, and Simulating Point-Based Geometry
 Meshless Modeling, Animating, and Simulating Point-Based Geometry Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Graphics Primitives - Points The emergence of points
Meshless Modeling, Animating, and Simulating Point-Based Geometry Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Graphics Primitives - Points The emergence of points
Module 4: Fluid Dynamics Lecture 9: Lagrangian and Eulerian approaches; Euler's acceleration formula. Fluid Dynamics: description of fluid-motion
 Fluid Dynamics: description of fluid-motion Lagrangian approach Eulerian approach (a field approach) file:///d /Web%20Course/Dr.%20Nishith%20Verma/local%20server/fluid_mechanics/lecture9/9_1.htm[5/9/2012
Fluid Dynamics: description of fluid-motion Lagrangian approach Eulerian approach (a field approach) file:///d /Web%20Course/Dr.%20Nishith%20Verma/local%20server/fluid_mechanics/lecture9/9_1.htm[5/9/2012
Chapter 3: Computer Animation Reminder: Descriptive animation. Procedural animation : Examples. Towards methods that generate motion?
 Chapter 3 : Computer Animation (continued) Chapter 3: Computer Animation Reminder: Descriptive animation Describes a single motion, with manual control Ex: direct kinematics with key-frames, inverse kinematics
Chapter 3 : Computer Animation (continued) Chapter 3: Computer Animation Reminder: Descriptive animation Describes a single motion, with manual control Ex: direct kinematics with key-frames, inverse kinematics
A simple example. Assume we want to find the change in the rotation angles to get the end effector to G. Effect of changing s
 CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
Particle Systems. Lecture 8 Taku Komura
 Particle Systems Computer Animation and Visualisation Lecture 8 Taku Komura Overview Particle System Modelling fuzzy objects (fire, smoke) Modelling liquid Modelling cloth Integration : implicit integration,
Particle Systems Computer Animation and Visualisation Lecture 8 Taku Komura Overview Particle System Modelling fuzzy objects (fire, smoke) Modelling liquid Modelling cloth Integration : implicit integration,
A Fast and Stable Approach for Restoration of Warped Document Images
 A Fast and Stable Approach for Restoration of Warped Document Images Kok Beng Chua, Li Zhang, Yu Zhang and Chew Lim Tan School of Computing, National University of Singapore 3 Science Drive 2, Singapore
A Fast and Stable Approach for Restoration of Warped Document Images Kok Beng Chua, Li Zhang, Yu Zhang and Chew Lim Tan School of Computing, National University of Singapore 3 Science Drive 2, Singapore
Lecture VI: Constraints and Controllers. Parts Based on Erin Catto s Box2D Tutorial
 Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Example 24 Spring-back
 Example 24 Spring-back Summary The spring-back simulation of sheet metal bent into a hat-shape is studied. The problem is one of the famous tests from the Numisheet 93. As spring-back is generally a quasi-static
Example 24 Spring-back Summary The spring-back simulation of sheet metal bent into a hat-shape is studied. The problem is one of the famous tests from the Numisheet 93. As spring-back is generally a quasi-static
Realtime Water Simulation on GPU. Nuttapong Chentanez NVIDIA Research
 1 Realtime Water Simulation on GPU Nuttapong Chentanez NVIDIA Research 2 3 Overview Approaches to realtime water simulation Hybrid shallow water solver + particles Hybrid 3D tall cell water solver + particles
1 Realtime Water Simulation on GPU Nuttapong Chentanez NVIDIA Research 2 3 Overview Approaches to realtime water simulation Hybrid shallow water solver + particles Hybrid 3D tall cell water solver + particles
CS 231. Deformation simulation (and faces)
") CS 231 Deformation simulation (and faces) Deformation BODY Simulation Discretization Spring-mass models difficult to model continuum properties Simple & fast to implement and understand Finite Element
CS 231 Deformation simulation (and faces) Deformation BODY Simulation Discretization Spring-mass models difficult to model continuum properties Simple & fast to implement and understand Finite Element
Guidelines for proper use of Plate elements
 Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
Navier-Stokes & Flow Simulation
 Last Time? Navier-Stokes & Flow Simulation Pop Worksheet! Teams of 2. Hand in to Jeramey after we discuss. Sketch the first few frames of a 2D explicit Euler mass-spring simulation for a 2x3 cloth network
Last Time? Navier-Stokes & Flow Simulation Pop Worksheet! Teams of 2. Hand in to Jeramey after we discuss. Sketch the first few frames of a 2D explicit Euler mass-spring simulation for a 2x3 cloth network
Constraint fluids in Sprinkle. Dennis Gustafsson Mediocre
 Constraint fluids in Sprinkle Dennis Gustafsson Mediocre Sprinkle. Sequel. Put out fires. Makeshift firetruck. Distant moon of Saturn. Fluid sim used at the core. Not only to put out fires -> move obstacles,
Constraint fluids in Sprinkle Dennis Gustafsson Mediocre Sprinkle. Sequel. Put out fires. Makeshift firetruck. Distant moon of Saturn. Fluid sim used at the core. Not only to put out fires -> move obstacles,
A brief introduction to fluidstructure. O. Souček
 A brief introduction to fluidstructure interactions O. Souček Fluid-structure interactions Important class computational models Civil engineering Biomechanics Industry Geophysics From http://www.ihs.uni-stuttgart.de
A brief introduction to fluidstructure interactions O. Souček Fluid-structure interactions Important class computational models Civil engineering Biomechanics Industry Geophysics From http://www.ihs.uni-stuttgart.de
CGT 581 G Fluids. Overview. Some terms. Some terms
 CGT 581 G Fluids Bedřich Beneš, Ph.D. Purdue University Department of Computer Graphics Technology Overview Some terms Incompressible Navier-Stokes Boundary conditions Lagrange vs. Euler Eulerian approaches
CGT 581 G Fluids Bedřich Beneš, Ph.D. Purdue University Department of Computer Graphics Technology Overview Some terms Incompressible Navier-Stokes Boundary conditions Lagrange vs. Euler Eulerian approaches
Real-Time Simulation of Deformation and Fracture of Stiff Materials
 Real-Time Simulation of Deformation and Fracture of Stiff Materials Matthias Müller Leonard McMillan Julie Dorsey Robert Jagnow Laboratory for Computer Science, Massachusetts Institute of Technology Abstract.
Real-Time Simulation of Deformation and Fracture of Stiff Materials Matthias Müller Leonard McMillan Julie Dorsey Robert Jagnow Laboratory for Computer Science, Massachusetts Institute of Technology Abstract.
SAMCEF for ROTORS. Chapter 3.2: Rotor modeling. This document is the property of SAMTECH S.A. MEF A, Page 1
 SAMCEF for ROTORS Chapter 3.2: Rotor modeling This document is the property of SAMTECH S.A. MEF 101-03-2-A, Page 1 Table of contents Introduction Introduction 1D Model 2D Model 3D Model 1D Models: Beam-Spring-
SAMCEF for ROTORS Chapter 3.2: Rotor modeling This document is the property of SAMTECH S.A. MEF 101-03-2-A, Page 1 Table of contents Introduction Introduction 1D Model 2D Model 3D Model 1D Models: Beam-Spring-
Simulation in Computer Graphics. Introduction. Matthias Teschner. Computer Science Department University of Freiburg
 Simulation in Computer Graphics Introduction Matthias Teschner Computer Science Department University of Freiburg Contact Matthias Teschner Computer Graphics University of Freiburg Georges-Koehler-Allee
Simulation in Computer Graphics Introduction Matthias Teschner Computer Science Department University of Freiburg Contact Matthias Teschner Computer Graphics University of Freiburg Georges-Koehler-Allee
DYNAMIC SIMULATION OF INEXTENSIBLE CLOTH
 DYNAMIC SIMULAION OF INEXENSIBLE CLOH Jan Bender, Daniel Bayer and Raphael Diziol Institut für Betriebs- und Dialogssysteme Universität Karlsruhe Am Fasanengarten 5 768 Karlsruhe Germany ABSRAC In this
DYNAMIC SIMULAION OF INEXENSIBLE CLOH Jan Bender, Daniel Bayer and Raphael Diziol Institut für Betriebs- und Dialogssysteme Universität Karlsruhe Am Fasanengarten 5 768 Karlsruhe Germany ABSRAC In this
Simulation of Fuel Sloshing Comparative Study
 3. LS-DYNA Anwenderforum, Bamberg 2004 Netfreie Verfahren Simulation of Fuel Sloshing Comparative Study Matej Vesenjak 1, Heiner Müllerschön 2, Alexander Hummel 3, Zoran Ren 1 1 University of Maribor,
3. LS-DYNA Anwenderforum, Bamberg 2004 Netfreie Verfahren Simulation of Fuel Sloshing Comparative Study Matej Vesenjak 1, Heiner Müllerschön 2, Alexander Hummel 3, Zoran Ren 1 1 University of Maribor,
Cloth The Animation of Natural Phenomena Adrien Treuille
 Cloth The Animation of Natural Phenomena Adrien Treuille Real Cloth Overview Properties of Real Cloth Cloth Simulation Properties of Cloth sheet of fabric (4) parameter for stretching (1) (4) parameter
Cloth The Animation of Natural Phenomena Adrien Treuille Real Cloth Overview Properties of Real Cloth Cloth Simulation Properties of Cloth sheet of fabric (4) parameter for stretching (1) (4) parameter
Application of Finite Volume Method for Structural Analysis
 Application of Finite Volume Method for Structural Analysis Saeed-Reza Sabbagh-Yazdi and Milad Bayatlou Associate Professor, Civil Engineering Department of KNToosi University of Technology, PostGraduate
Application of Finite Volume Method for Structural Analysis Saeed-Reza Sabbagh-Yazdi and Milad Bayatlou Associate Professor, Civil Engineering Department of KNToosi University of Technology, PostGraduate
Lecture VI: Constraints and Controllers
 Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Particle-based Fluid Simulation
 Simulation in Computer Graphics Particle-based Fluid Simulation Matthias Teschner Computer Science Department University of Freiburg Application (with Pixar) 10 million fluid + 4 million rigid particles,
Simulation in Computer Graphics Particle-based Fluid Simulation Matthias Teschner Computer Science Department University of Freiburg Application (with Pixar) 10 million fluid + 4 million rigid particles,
Project 1. Has been posted! Previous year projects:
 Project 1 Has been posted! Previous year projects: Bren Meeder Heegun Lee Hair Simulation (and Rendering) Image from Final Fantasy (Kai s hair) Adrien Treuille Overview More Constraints Hair Real Hair
Project 1 Has been posted! Previous year projects: Bren Meeder Heegun Lee Hair Simulation (and Rendering) Image from Final Fantasy (Kai s hair) Adrien Treuille Overview More Constraints Hair Real Hair
THE development of stable, robust and fast methods that
 44 SBC Journal on Interactive Systems, volume 5, number 1, 2014 Fast Simulation of Cloth Tearing Marco Santos Souza, Aldo von Wangenheim, Eros Comunello 4Vision Lab - Univali INCoD - Federal University
44 SBC Journal on Interactive Systems, volume 5, number 1, 2014 Fast Simulation of Cloth Tearing Marco Santos Souza, Aldo von Wangenheim, Eros Comunello 4Vision Lab - Univali INCoD - Federal University
Position Based Dynamics for Character Effects
 Position Based Dynamics for Character Effects Aina Nicolau Orell Master Thesis MSc Computer Animation and Visual Effects Bournemouth University NCCA August, 2016 Contents 1. Introduction... 4 2. Related
Position Based Dynamics for Character Effects Aina Nicolau Orell Master Thesis MSc Computer Animation and Visual Effects Bournemouth University NCCA August, 2016 Contents 1. Introduction... 4 2. Related
Navier-Stokes & Flow Simulation
 Last Time? Navier-Stokes & Flow Simulation Optional Reading for Last Time: Spring-Mass Systems Numerical Integration (Euler, Midpoint, Runge-Kutta) Modeling string, hair, & cloth HW2: Cloth & Fluid Simulation
Last Time? Navier-Stokes & Flow Simulation Optional Reading for Last Time: Spring-Mass Systems Numerical Integration (Euler, Midpoint, Runge-Kutta) Modeling string, hair, & cloth HW2: Cloth & Fluid Simulation
Ragdoll Physics. Abstract. 2 Background. 1 Introduction. Gabe Mulley, Matt Bittarelli. April 25th, Previous Work
 Ragdoll Physics Gabe Mulley, Matt Bittarelli April 25th, 2007 Abstract The goal of this project was to create a real-time, interactive, and above all, stable, ragdoll physics simulation. This simulation
Ragdoll Physics Gabe Mulley, Matt Bittarelli April 25th, 2007 Abstract The goal of this project was to create a real-time, interactive, and above all, stable, ragdoll physics simulation. This simulation
Fluid-Structure-Interaction Using SPH and GPGPU Technology
 IMPETUS AFEA SOLVER Fluid-Structure-Interaction Using SPH and GPGPU Technology Jérôme Limido Jean Luc Lacome Wayne L. Mindle GTC May 2012 IMPETUS AFEA SOLVER 1 2D Sloshing Water in Tank IMPETUS AFEA SOLVER
IMPETUS AFEA SOLVER Fluid-Structure-Interaction Using SPH and GPGPU Technology Jérôme Limido Jean Luc Lacome Wayne L. Mindle GTC May 2012 IMPETUS AFEA SOLVER 1 2D Sloshing Water in Tank IMPETUS AFEA SOLVER
Polygonal Mesh. Geometric object made of vertices, edges and faces. Faces are polygons. Polyhedron. Triangular mesh Quad mesh. Pyramid Cube Sphere (?
 1 Mesh Modeling Polygonal Mesh Geometric object made of vertices, edges and faces Polyhedron Pyramid Cube Sphere (?) Can also be 2D (although much less interesting) Faces are polygons Triangular mesh Quad
1 Mesh Modeling Polygonal Mesh Geometric object made of vertices, edges and faces Polyhedron Pyramid Cube Sphere (?) Can also be 2D (although much less interesting) Faces are polygons Triangular mesh Quad
Overview of Traditional Surface Tracking Methods
 Liquid Simulation With Mesh-Based Surface Tracking Overview of Traditional Surface Tracking Methods Matthias Müller Introduction Research lead of NVIDIA PhysX team PhysX GPU acc. Game physics engine www.nvidia.com\physx
Liquid Simulation With Mesh-Based Surface Tracking Overview of Traditional Surface Tracking Methods Matthias Müller Introduction Research lead of NVIDIA PhysX team PhysX GPU acc. Game physics engine www.nvidia.com\physx
A New Self-Collision Detection Method for Cloth Simulation
 Send Orders for Reprints to reprints@benthamscience.ae 386 The Open Electrical & Electronic Engineering Journal, 205, 9, 386-392 A New Self-Collision Detection Method for Cloth Simulation Open Access Fengquan
Send Orders for Reprints to reprints@benthamscience.ae 386 The Open Electrical & Electronic Engineering Journal, 205, 9, 386-392 A New Self-Collision Detection Method for Cloth Simulation Open Access Fengquan
Finite Element Method. Chapter 7. Practical considerations in FEM modeling
 Finite Element Method Chapter 7 Practical considerations in FEM modeling Finite Element Modeling General Consideration The following are some of the difficult tasks (or decisions) that face the engineer
Finite Element Method Chapter 7 Practical considerations in FEM modeling Finite Element Modeling General Consideration The following are some of the difficult tasks (or decisions) that face the engineer
Fracture & Tetrahedral Models
 Pop Worksheet! Teams of 2. Hand in to Jeramey after we discuss. What are the horizontal and face velocities after 1, 2, and many iterations of divergence adjustment for an incompressible fluid? Fracture
Pop Worksheet! Teams of 2. Hand in to Jeramey after we discuss. What are the horizontal and face velocities after 1, 2, and many iterations of divergence adjustment for an incompressible fluid? Fracture
3D Physics Engine for Elastic and Deformable Bodies. Liliya Kharevych and Rafi (Mohammad) Khan Advisor: David Mount
 Khan Advisor: David Mount") 3D Physics Engine for Elastic and Deformable Bodies Liliya Kharevych and Rafi (Mohammad) Khan Advisor: David Mount University of Maryland, College Park December 2002 Abstract The purpose of this project
3D Physics Engine for Elastic and Deformable Bodies Liliya Kharevych and Rafi (Mohammad) Khan Advisor: David Mount University of Maryland, College Park December 2002 Abstract The purpose of this project
Parallel GPU-Based Fluid Animation. Master s thesis in Interaction Design and Technologies JAKOB SVENSSON
 Parallel GPU-Based Fluid Animation Master s thesis in Interaction Design and Technologies JAKOB SVENSSON Department of Applied Information Technology CHALMERS UNIVERSITY OF TECHNOLOGY Gothenburg, Sweden
Parallel GPU-Based Fluid Animation Master s thesis in Interaction Design and Technologies JAKOB SVENSSON Department of Applied Information Technology CHALMERS UNIVERSITY OF TECHNOLOGY Gothenburg, Sweden
Physically based modelling Computer Graphics I February 27, 2003
 Physically based modelling 15-462 Computer Graphics I February 27, 2003 Outline Overview Particle systems Numerical solution of ODEs Constraints Collisions Motivation Animation is hard! Secondary motion
Physically based modelling 15-462 Computer Graphics I February 27, 2003 Outline Overview Particle systems Numerical solution of ODEs Constraints Collisions Motivation Animation is hard! Secondary motion
SPH: Why and what for?
 SPH: Why and what for? 4 th SPHERIC training day David Le Touzé, Fluid Mechanics Laboratory, Ecole Centrale de Nantes / CNRS SPH What for and why? How it works? Why not for everything? Duality of SPH SPH
SPH: Why and what for? 4 th SPHERIC training day David Le Touzé, Fluid Mechanics Laboratory, Ecole Centrale de Nantes / CNRS SPH What for and why? How it works? Why not for everything? Duality of SPH SPH
Sand Simulation. Abhinav Golas. COMP Physically Based Simulation. Final Project Presentation. May 6,
 Sand Simulation Abhinav Golas COMP 768 - Physically Based Simulation Final Project Presentation May 6, 2009 1 Motivation Movies, games Spiderman 3 Engineering design grain silos Avalanches, Landslides
Sand Simulation Abhinav Golas COMP 768 - Physically Based Simulation Final Project Presentation May 6, 2009 1 Motivation Movies, games Spiderman 3 Engineering design grain silos Avalanches, Landslides
Hair Simulation (and Rendering)
") Hair Simulation (and Rendering) Image from Final Fantasy (Kai s hair) Adrien Treuille Overview Project Solving Linear Systems Questions About the Project Hair Real Hair Hair Dynamics Hair Rendering Course
Hair Simulation (and Rendering) Image from Final Fantasy (Kai s hair) Adrien Treuille Overview Project Solving Linear Systems Questions About the Project Hair Real Hair Hair Dynamics Hair Rendering Course
Acknowledgements. Prof. Dan Negrut Prof. Darryl Thelen Prof. Michael Zinn. SBEL Colleagues: Hammad Mazar, Toby Heyn, Manoj Kumar
 Philipp Hahn Acknowledgements Prof. Dan Negrut Prof. Darryl Thelen Prof. Michael Zinn SBEL Colleagues: Hammad Mazar, Toby Heyn, Manoj Kumar 2 Outline Motivation Lumped Mass Model Model properties Simulation
Philipp Hahn Acknowledgements Prof. Dan Negrut Prof. Darryl Thelen Prof. Michael Zinn SBEL Colleagues: Hammad Mazar, Toby Heyn, Manoj Kumar 2 Outline Motivation Lumped Mass Model Model properties Simulation
DYNAMICS FOR ANIMATION. Rémi Ronfard, Animation, M2R MOSIG
 DYNAMICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG Summary of physics-based animation Motivation Newton s Laws Point-mass models Rigid and articulated bodies Ragdoll physics From kinematics to dynamics
DYNAMICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG Summary of physics-based animation Motivation Newton s Laws Point-mass models Rigid and articulated bodies Ragdoll physics From kinematics to dynamics
IMPROVED WALL BOUNDARY CONDITIONS WITH IMPLICITLY DEFINED WALLS FOR PARTICLE BASED FLUID SIMULATION
 6th European Conference on Computational Mechanics (ECCM 6) 7th European Conference on Computational Fluid Dynamics (ECFD 7) 1115 June 2018, Glasgow, UK IMPROVED WALL BOUNDARY CONDITIONS WITH IMPLICITLY
6th European Conference on Computational Mechanics (ECCM 6) 7th European Conference on Computational Fluid Dynamics (ECFD 7) 1115 June 2018, Glasgow, UK IMPROVED WALL BOUNDARY CONDITIONS WITH IMPLICITLY
Dynamics in Maya. Gary Monheit Alias Wavefront PHYSICALLY BASED MODELING SH1 SIGGRAPH 97 COURSE NOTES
 Dynamics in Maya Gary Monheit Alias Wavefront SH1 Dynamics in Maya Overall Requirements Architecture and Features Animations SH2 Overall Requirements Why Dynamics? Problems with traditional animation techniques
Dynamics in Maya Gary Monheit Alias Wavefront SH1 Dynamics in Maya Overall Requirements Architecture and Features Animations SH2 Overall Requirements Why Dynamics? Problems with traditional animation techniques
Adarsh Krishnamurthy (cs184-bb) Bela Stepanova (cs184-bs)
 Bela Stepanova (cs184-bs)") OBJECTIVE FLUID SIMULATIONS Adarsh Krishnamurthy (cs184-bb) Bela Stepanova (cs184-bs) The basic objective of the project is the implementation of the paper Stable Fluids (Jos Stam, SIGGRAPH 99). The final
OBJECTIVE FLUID SIMULATIONS Adarsh Krishnamurthy (cs184-bb) Bela Stepanova (cs184-bs) The basic objective of the project is the implementation of the paper Stable Fluids (Jos Stam, SIGGRAPH 99). The final
[3] Rigid Body Analysis
![[3] Rigid Body Analysis](/thumbs/92/109073357.jpg "[3] Rigid Body Analysis") [3] Rigid Body Analysis Page 1 of 53 [3] Rigid Body Analysis [3.1] Equilibrium of a Rigid Body [3.2] Equations of Equilibrium [3.3] Equilibrium in 3-D [3.4] Simple Trusses [3.5] The Method of Joints [3.6]
[3] Rigid Body Analysis Page 1 of 53 [3] Rigid Body Analysis [3.1] Equilibrium of a Rigid Body [3.2] Equations of Equilibrium [3.3] Equilibrium in 3-D [3.4] Simple Trusses [3.5] The Method of Joints [3.6]
Cloth Simulation on the GPU. Cyril Zeller NVIDIA Corporation
 Cloth Simulation on the GPU Cyril Zeller NVIDIA Corporation Overview A method to simulate cloth on any GPU supporting Shader Model 3 (Quadro FX 4500, 4400, 3400, 1400, 540, GeForce 6 and above) Takes advantage
Cloth Simulation on the GPU Cyril Zeller NVIDIA Corporation Overview A method to simulate cloth on any GPU supporting Shader Model 3 (Quadro FX 4500, 4400, 3400, 1400, 540, GeForce 6 and above) Takes advantage
NVIDIA. Interacting with Particle Simulation in Maya using CUDA & Maximus. Wil Braithwaite NVIDIA Applied Engineering Digital Film
 NVIDIA Interacting with Particle Simulation in Maya using CUDA & Maximus Wil Braithwaite NVIDIA Applied Engineering Digital Film Some particle milestones FX Rendering Physics 1982 - First CG particle FX
NVIDIA Interacting with Particle Simulation in Maya using CUDA & Maximus Wil Braithwaite NVIDIA Applied Engineering Digital Film Some particle milestones FX Rendering Physics 1982 - First CG particle FX
Divergence-Free Smoothed Particle Hydrodynamics
 Copyright of figures and other materials in the paper belongs to original authors. Divergence-Free Smoothed Particle Hydrodynamics Bender et al. SCA 2015 Presented by MyungJin Choi 2016-11-26 1. Introduction
Copyright of figures and other materials in the paper belongs to original authors. Divergence-Free Smoothed Particle Hydrodynamics Bender et al. SCA 2015 Presented by MyungJin Choi 2016-11-26 1. Introduction
Engineering Effects of Boundary Conditions (Fixtures and Temperatures) J.E. Akin, Rice University, Mechanical Engineering
 J.E. Akin, Rice University, Mechanical Engineering") Engineering Effects of Boundary Conditions (Fixtures and Temperatures) J.E. Akin, Rice University, Mechanical Engineering Here SolidWorks stress simulation tutorials will be re-visited to show how they
Engineering Effects of Boundary Conditions (Fixtures and Temperatures) J.E. Akin, Rice University, Mechanical Engineering Here SolidWorks stress simulation tutorials will be re-visited to show how they
Smoke Simulation using Smoothed Particle Hydrodynamics (SPH) Shruti Jain MSc Computer Animation and Visual Eects Bournemouth University
 Shruti Jain MSc Computer Animation and Visual Eects Bournemouth University") Smoke Simulation using Smoothed Particle Hydrodynamics (SPH) Shruti Jain MSc Computer Animation and Visual Eects Bournemouth University 21st November 2014 1 Abstract This report is based on the implementation
Smoke Simulation using Smoothed Particle Hydrodynamics (SPH) Shruti Jain MSc Computer Animation and Visual Eects Bournemouth University 21st November 2014 1 Abstract This report is based on the implementation
Computer Graphics Ray Casting. Matthias Teschner
 Computer Graphics Ray Casting Matthias Teschner Outline Context Implicit surfaces Parametric surfaces Combined objects Triangles Axis-aligned boxes Iso-surfaces in grids Summary University of Freiburg
Computer Graphics Ray Casting Matthias Teschner Outline Context Implicit surfaces Parametric surfaces Combined objects Triangles Axis-aligned boxes Iso-surfaces in grids Summary University of Freiburg
Real-Time Simulation of Deformation and Fracture of Stiff Materials
 EUROGRAPHICS 200 / Workshop on Animation and Simulation Real-Time Simulation of Deformation and Fracture of Stiff Materials Matthias Müller Leonard McMillan Julie Dorsey Robert Jagnow Laboratory for Computer
EUROGRAPHICS 200 / Workshop on Animation and Simulation Real-Time Simulation of Deformation and Fracture of Stiff Materials Matthias Müller Leonard McMillan Julie Dorsey Robert Jagnow Laboratory for Computer
9. Representing constraint
 9. Representing constraint Mechanics of Manipulation Matt Mason matt.mason@cs.cmu.edu http://www.cs.cmu.edu/~mason Carnegie Mellon Lecture 9. Mechanics of Manipulation p.1 Lecture 9. Representing constraint.
9. Representing constraint Mechanics of Manipulation Matt Mason matt.mason@cs.cmu.edu http://www.cs.cmu.edu/~mason Carnegie Mellon Lecture 9. Mechanics of Manipulation p.1 Lecture 9. Representing constraint.
Last Time? Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
Characteristic Aspects of SPH Solutions
 Characteristic Aspects of SPH Solutions for Free Surface Problems: Source and Possible Treatment of High Frequency Numerical Oscillations of Local Loads. A. Colagrossi*, D. Le Touzé & G.Colicchio* *INSEAN
Characteristic Aspects of SPH Solutions for Free Surface Problems: Source and Possible Treatment of High Frequency Numerical Oscillations of Local Loads. A. Colagrossi*, D. Le Touzé & G.Colicchio* *INSEAN
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
The 3D DSC in Fluid Simulation
 The 3D DSC in Fluid Simulation Marek K. Misztal Informatics and Mathematical Modelling, Technical University of Denmark mkm@imm.dtu.dk DSC 2011 Workshop Kgs. Lyngby, 26th August 2011 Governing Equations
The 3D DSC in Fluid Simulation Marek K. Misztal Informatics and Mathematical Modelling, Technical University of Denmark mkm@imm.dtu.dk DSC 2011 Workshop Kgs. Lyngby, 26th August 2011 Governing Equations
Real-Time Hair Simulation and Rendering on the GPU. Louis Bavoil
 Real-Time Hair Simulation and Rendering on the GPU Sarah Tariq Louis Bavoil Results 166 simulated strands 0.99 Million triangles Stationary: 64 fps Moving: 41 fps 8800GTX, 1920x1200, 8XMSAA Results 166
Real-Time Hair Simulation and Rendering on the GPU Sarah Tariq Louis Bavoil Results 166 simulated strands 0.99 Million triangles Stationary: 64 fps Moving: 41 fps 8800GTX, 1920x1200, 8XMSAA Results 166
Modelling of Impact on a Fuel Tank Using Smoothed Particle Hydrodynamics
 Modelling of Impact on a Fuel Tank Using Smoothed Particle Hydrodynamics R. Vignjevic a, T. De Vuyst a, J. Campbell a, N. Bourne b School of Engineering, Cranfield University, Bedfordshire, MK43 0AL, UK.
Modelling of Impact on a Fuel Tank Using Smoothed Particle Hydrodynamics R. Vignjevic a, T. De Vuyst a, J. Campbell a, N. Bourne b School of Engineering, Cranfield University, Bedfordshire, MK43 0AL, UK.
Chapter 13 - Modifiers
 Chapter 13 - Modifiers The modifier list continues to grow with each new release of Blender. We have already discussed the Subdivision Surface (SubSurf) and Ocean modifiers in previous chapters and will
Chapter 13 - Modifiers The modifier list continues to grow with each new release of Blender. We have already discussed the Subdivision Surface (SubSurf) and Ocean modifiers in previous chapters and will
Unstructured Mesh Generation for Implicit Moving Geometries and Level Set Applications
 Unstructured Mesh Generation for Implicit Moving Geometries and Level Set Applications Per-Olof Persson (persson@mit.edu) Department of Mathematics Massachusetts Institute of Technology http://www.mit.edu/
Unstructured Mesh Generation for Implicit Moving Geometries and Level Set Applications Per-Olof Persson (persson@mit.edu) Department of Mathematics Massachusetts Institute of Technology http://www.mit.edu/
A Geometric Approach to Animating Thin Surface Features in SPH Water
 A Geometric Approach to Animating Thin Surface Features in SPH Water Taekwon Jang et al. Computer Animation and Social Agents 2013 (CASA) Jong-Hyun Kim 2013. 11.08 Abstract We propose a geometric approach
A Geometric Approach to Animating Thin Surface Features in SPH Water Taekwon Jang et al. Computer Animation and Social Agents 2013 (CASA) Jong-Hyun Kim 2013. 11.08 Abstract We propose a geometric approach
Animation of Fluids. Animating Fluid is Hard
 Animation of Fluids Animating Fluid is Hard Too complex to animate by hand Surface is changing very quickly Lots of small details In short, a nightmare! Need automatic simulations AdHoc Methods Some simple
Animation of Fluids Animating Fluid is Hard Too complex to animate by hand Surface is changing very quickly Lots of small details In short, a nightmare! Need automatic simulations AdHoc Methods Some simple
PPGCC Linha de Pesquisa SIV Disciplina: Animação Computadorizada. Profª. Drª. Soraia Raupp Musse Pós-doc Dr Leandro Dihl 12/05/2015
 PPGCC Linha de Pesquisa SIV Disciplina: Animação Computadorizada Profª. Drª. Soraia Raupp Musse Pós-doc Dr Leandro Dihl 12/05/2015 Cloth Simulation Cloth simulation has been an important topic in computer
PPGCC Linha de Pesquisa SIV Disciplina: Animação Computadorizada Profª. Drª. Soraia Raupp Musse Pós-doc Dr Leandro Dihl 12/05/2015 Cloth Simulation Cloth simulation has been an important topic in computer
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Generative Part Structural Analysis Fundamentals
 CATIA V5 Training Foils Generative Part Structural Analysis Fundamentals Version 5 Release 19 September 2008 EDU_CAT_EN_GPF_FI_V5R19 About this course Objectives of the course Upon completion of this course
CATIA V5 Training Foils Generative Part Structural Analysis Fundamentals Version 5 Release 19 September 2008 EDU_CAT_EN_GPF_FI_V5R19 About this course Objectives of the course Upon completion of this course
Non-Rigid Image Registration III
 Non-Rigid Image Registration III CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS6240) Non-Rigid Image Registration
Non-Rigid Image Registration III CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS6240) Non-Rigid Image Registration
Intuitive Control of Dynamic Simulation Using Improved Implicit Constraint Enforcement
 Intuitive Control of Dynamic Simulation Using Improved Implicit Constraint Enforcement Min Hong, Samuel Welch, and Min-Hyung Choi 3 Bioinformatics, University of Colorado Health Sciences Center, 400 E.
Intuitive Control of Dynamic Simulation Using Improved Implicit Constraint Enforcement Min Hong, Samuel Welch, and Min-Hyung Choi 3 Bioinformatics, University of Colorado Health Sciences Center, 400 E.
Solidification using Smoothed Particle Hydrodynamics
 Solidification using Smoothed Particle Hydrodynamics Master Thesis CA-3817512 Game and Media Technology Utrecht University, The Netherlands Supervisors: dr. ir. J.Egges dr. N.G. Pronost July, 2014 - 2
Solidification using Smoothed Particle Hydrodynamics Master Thesis CA-3817512 Game and Media Technology Utrecht University, The Netherlands Supervisors: dr. ir. J.Egges dr. N.G. Pronost July, 2014 - 2
Fluid-structure Interaction by the mixed SPH-FE Method with Application to Aircraft Ditching
 Fluid-structure Interaction by the mixed SPH-FE Method with Application to Aircraft Ditching Paul Groenenboom ESI Group Delft, Netherlands Martin Siemann German Aerospace Center (DLR) Stuttgart, Germany
Fluid-structure Interaction by the mixed SPH-FE Method with Application to Aircraft Ditching Paul Groenenboom ESI Group Delft, Netherlands Martin Siemann German Aerospace Center (DLR) Stuttgart, Germany
Interactive Real Time Cloth Simulation with Adaptive Level of Detail
 Interactive Real Time Cloth Simulation with Adaptive Level of Detail Olof Häggström February 5, 2009 Master s Thesis in Engineering Physics, 30 credits Supervisor at EA-DICE: Joakim Lord and Torbjörn Söderman
Interactive Real Time Cloth Simulation with Adaptive Level of Detail Olof Häggström February 5, 2009 Master s Thesis in Engineering Physics, 30 credits Supervisor at EA-DICE: Joakim Lord and Torbjörn Söderman
Soft Body. 9.7 Physics - Soft Body
 9.7 Physics - Soft Body Soft Body...1 Typical scenarios for using Soft Bodies...2 Creating a Soft Body...3 Simulation Quality...3 Cache and Bake...4 Interaction in real time...5 Tips...5 Exterior Forces...5
9.7 Physics - Soft Body Soft Body...1 Typical scenarios for using Soft Bodies...2 Creating a Soft Body...3 Simulation Quality...3 Cache and Bake...4 Interaction in real time...5 Tips...5 Exterior Forces...5