Chromaticity-matched Superimposition of Foreground Objects in Different Environments
|
|
|
- Cuthbert Waters
- 5 years ago
- Views:
Transcription
1 FCV216, the 22nd Korea-Japan Joint Workshop on Frontiers of Computer Vision Chromatiity-mathed Superimposition of Foreground Objets in Different Environments Yohei Ogura Graduate Shool of Siene and Tehnology Keio University Yoihi Nakasone Huawei Tehnologies Japan Shao Ming Huawei Tehnologies Japan Hideo Saito Graduate Shool of Siene and Tehnology Keio University Abstrat The illumination hromatiity is one of the important fator for appearane of objets in images. When we superimpose some objets on another sene to generate omposite images, the resulting image may give us strangeness if the illumination hromatiity of foreground sene and bakground sene are different. In this paper, we propose a omposite image synthesis method whih an ahieve illumination hromatiity onsisteny. Our goal is to generate a illumination hromatiity-mathed omposite image from two images whih are taken under different illumination environment. We estimate hromatiity of two senes based on segmented olor regions. Subsequently illumination hromatiity mathing is performed based on estimated hromatiity of two senes. After the hromatiity mathing proess, we extrat the target person by using the grab ut segmentation. The result image is obtained by superimposing the target person or objet onto bakground sene. We demonstrate that our method an perform some different illumination hromatiity environment. I. INTRODUCTION Making a omposite image is an important funtionality of image editing for entertainment experienes. Typial appliation is superimposing a person into a different image that aptures different sene. However, we may feel something is strange if the illumination olor of two senes are different. Illumination hromatiity is one of the most essential fator that deides how a person in a image looks like. Therefore, we should ahieve the onsisteny of illumination hromatiity of a foreground objet and a bakground sene when we make omposite images. Some illumination hromatiity estimation methods based on the assumption of Dihromati Refletion Model as refletane property of the target sene. have been proposed. The dihromati refletion model represents surfae refletane as aombination of an objet olor by diffuse refletion and a illumination olor by speular refletion. We an assume that a most of everyday things, suh as things made of plasti, usually have speular refletion, but there are some exeption suh as general lothing with low speular refletion. The dihromati refletion model is widely used as the model whih an approximate surfae refletane of general things. This model was proposed by Shafer et al. [1]. Klinker et al. showed that it is possible to apply the dihromati refletion model to real senes and to determine the illumination olor from the model [2]. Lehmann et al. proposed a method that applied the two-dimensional dihromati refletion model to the regions around the speular highlights in a olor image, and estimated the illumination hromatiity [3]. Finlayson et al proposed illumination hromatiity estimation method using the blak-body radiator in two-dimensional spae. [4]. Tajima showed the illumination hromatiity estimation using the two dimentional dihromati refletion model with imperfet image segmentation [6]. Tajima also showed that the two dimentional dihromati refletion model an be applied to apparently lambertian surfae with multiple olors. In this paper, we propose a omposite image synthesis method whih an ahieve illumination hromatiity onsisteny. Our goal is to generate a illumination hromatiitymathed omposite image from two images whih are taken under different environment. We estimate illumination hromatiity of two senes from multiply segmented region whih have different olors. The illumination hromatiity estimation is based on the method proposed by Tajima [6]. Subsequently illumination hromatiity mathing is performed based on estimated hromatiity of two senes. After the hromatiity mathing proess, we extrat the target person or objet region by using the grab ut segmentation algorithm. Finally, the result image is obtained by superimposing the target person or objet onto bakground sene. II. PROPOSED METHOD Our goal is to ahieve illumination hromatiity onsisteny on omposite images from two images whih are taken under different environment. At first, illumination hromatiity of input images are estimated from multiple olor segmented region. This proess is based on the work proposed by Tajima [6]. We estimate illumination hromatiity from a olor image onsists from multiple olor. The input olor images are segmented into multiple region and estimate illumination hromatiity on eah input image. After the illumination hromatiity estimation proess, we adjust the hromatiity of the sene whih has a target person or objet to be superimposed. Subsequently, the region of target person or objet is subtrated based on the grab ut segmentation. Finally, the target person or objet is superimposed on bakground sene

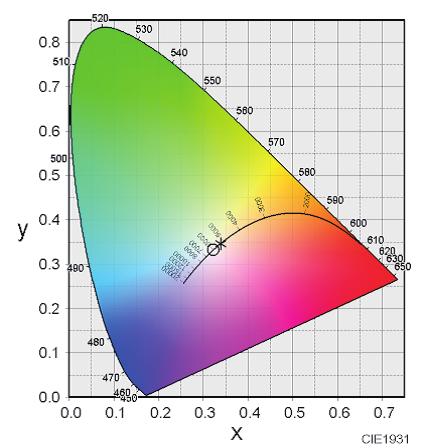
 X +Y +Z X +Y +Z Sine we have obtained hromatiity values on eah point, we plot the lustered points (x, y) whih are assigned in eah segmented region on the CIE-xy hromatiity diagram.")


![Sr sene is the sene whih has the objet to be superimposed. Dst sene is the sene to be the bakground of the omposite image. Our hromatiity estimation part is based on a method by Tajima [6].](/docs-images/96/127970997/images/2-4.jpg "At first, the input olor images are onverted from RGB olor spae into HSV olor spae.")
2 A. Illumination Chromatiity Estimation same region beause the illumination hromatiity estimation is based on this assumption. After the olor segmentation, we estimate illumination hromatiity. We assume that illumination hromatiity is onstant throughout the input image and illumination intensity is not taken into aount. First, we onvert the input olor image from RGB olor spae to CIE-XYZ olor spae to obtain eah value (X, Y, Z). Subsequently we alulate the hromatiity by using the following equation. X Y, y= (1) X +Y +Z X +Y +Z Sine we have obtained hromatiity values on eah point, we plot the lustered points (x, y) whih are assigned in eah segmented region on the CIE-xy hromatiity diagram. The prinipal omponent analysis (PCA) algorithm is applied to eah lusters and obtain the first prinipal omponent and the entroid. Illumination hromatiity is assumed to lie on the line whih orresponds the diretion of first prinipal omponent and the entroid of the luster. The hromatiity lines an be expressed as shown in Equation (2). x= aj y + bj x = j Fig. 1. Target region extration and superimposition Before the explanation of illumination hromatiity estimation, we define the name of the input sene. Sr sene is the sene whih has the objet to be superimposed. Dst sene is the sene to be the bakground of the omposite image. Our hromatiity estimation part is based on a method by Tajima [6]. At first, the input olor images are onverted from RGB olor spae into HSV olor spae. The olor segmentation is done in five dimensional spae: hue, saturation and value from HSV olor spae and x, y from olor image oordinate. Eah of these five properties has different value range so eah property is weighted to get appropriate segmentation result. The important point is that objets having the same olor and onsisting from the same material should be divided into the Fig. 2. Input image for olor segmentation the result of olor segmentation (2) aj bj j are the oeffiients of the jth hromatiity line. So we an estimate the illumination hromatiity from an intersetion of all lines. However, all lines do not always interset eah other at a single point. Therefore, we estimate the point (xl, yl ) that minimizes the distane between all lines and point (xl, yl ) by using the least square method. We an express Equation (2) in a matrix system as shown in Equation (3) 1 a 1 b1 2 a 2 b2 x, x =, =. (3) A=.... y.... an bn n We minimize the error Ax 2 and obtain (xl, yl ). After that, (xl, yl ) is onstrained to the urve of the blakbody radiator. Natural light soures suh as sunlight or light from light bulbs an be approximated by the blak-body radiator. The power spetrum E(λ, T ) of the blak-body radiator an be shown by Equation (4) E(λ, T ) = 2h2 1 h λ5 e kt λ 1 (4) T is the temperature of the blak-body in Kelvin. h is the plank onstant and k is the Boltzmann onstant. shows the speed of light. We projet the urve of the blak-body radiator(equation (4)) onto CIE-xy hromatiity diagram and obtain the quadrati funtion [7]. Sine we have a point (xl, yl ) whih minimizes the distane between all lines, the final result of illumination hromatiity (x, y ) an be obtained by estimating the nearest point on the blak-body radiator urve from (xl, yl ). This illumination hromatiity estimation proess is done on both the foreground sene and the bakground sene
 that we have estimated are normalized values.")
.")
3 B. Chromatiity Adjustment We have estimated the illumination hromatiity as desribed in the setion II-A. The purpose of this setion is to ahieve the hromatiity onsisteny between the sr sene image and the dst sene image. The illumination hromatiity (x, y ) that we have estimated are normalized values. z an be obtained easily from (x, y ) and Equation (5) x + y + z = 1 (5) sr sr Here we an get hromatiity of sr sene (xsr, y, z ) dst dst dst and dst sene (x, y, z ). Then, the hromatiity of sr sene is adjusted to math the hromatiity of dst sene by the ratio of the hromatiity shown in Equation (6). xdst Ix (p) xsr Ixout (p) in ydst Iyin (p) (6) Iyout (p) = sr y Izout (p) Izin (p) z dst zsr (Ixin (p), Iyin (p), Izin (p)) indiate input pixel values whih onverted to CIE-XYZ olor spae at a point p and (Ixout (p), Iyout (p), Izout (p)) shows output pixel values respetively. This proessing is applied to all pixels of the input image. sr sr dst dst dst Note that (xsr, y, z ) and (x, y, z ) are normalized values. This means that it shows the ratio of (X, Y, Z) values. Therefore, we don t take into aount the differene of the illumination intensity(brightness) on sr sene and dst sene. The input image and adjusted image are shown in Figure II-B. Fig. 4. Target region extration and superimposition () Fig. 3. Sr sene before hromatiity adjustment. After hromatiity adjustment. Fig. 5. Input image After the first iteration of grab ut segmentation () user input of touh up proess final segmentation result C. Target Region Extration and Superimposition tagged image and the final extrated result image are shown in Figure 5. Our goal is to make omposite images so the boundary of the target objet and bakground sene is very important. We apply the alpha blending around the boundary of the objet when the target objet is superimposed on dst sene. We onsider the illumination hromatiity onsisnteny only and don t take are of geometrial onsisteny in our method. We have obtained adjusted olor image of sr sene. In this setion, we introdue the target region extration and superimposition on dst sene. In our method, we use the grab ut segmentation algorithm [8] to extrat the target region. Firstly, a target region is seleted with a retangular and the first iteration is performed subsequently. If there are some redundant regions or regions whih are needed but removed in the first iteration result, users an touh up the segmented result. Users an set four tags: definitely foreground, definitely bakground, probably foreground and probably bakground. After the tagging, the seond iteration is performed. This iterative proess is performed until the extration result is appropriate. An input image, the first iteration result, the III. E XPERIMENTS In this setion, we present experiments performed to demonstrate the effetiveness of the proposed method. We apture an image of a person standing in arbitrary illumination environment. Illumination hromatiity of the sene is unknown in -143-


4 this ase. We estimate illumination hromatiity of Sr sene and Dst sene, and adjust the Sr sene s hromatiity to fit to Dst sene. Finally, we get the final result by superposing the person to the bakground images. A. Experiment ondition We aptured a person under slightly amber illumination for sr sene. Dst sene is the other plae and onsists from slightly bluish illumination for Pattern 1, as shown in Figure 6. For Pattern 2, sr sene is aptured in indoor sene whih has fluoresent lamps. Dst sene is the same sene as sr sene of Pattern 1, whih has slightly amber illumination as shown in Figure 7. Fig. 6. Input images for experiment 1. Sr sene Dst sene The result for Pattern 2 are shown in Figure 9. Illumination hromatiity of Sr sene is estimated as white and that of Dst sene is estimated as a little amber, as shown in Figure 9, (e) and (f). Comparing Figure 9, and (), our method ould estimate and math the hromatiity and generate a omposite image with illumination hromatiity onsisteny. IV. CONCLUSION In this paper, we proposed a omposite image synthesis method whih an ahieve illumination hromatiity onsisteny. Illumination hromatiity of two senes were estimated from multiple segmented regions with different olors. Using multiple olor regions, the illumination hromatiity an be estimated even without rih speular refletion. Subsequently illumination hromatiity mathing was performed based on estimated hromatiity of two senes. After the hromatiity mathing proess, we segment the target person or objet on the grab ut segmentation algorithm. Finally, the result image is obtained by superimposing the target person or objet onto bakground sene. In experiment, we tested our method to show the utility and quantitative evaluation. The future work are the quantitative evaluation and making our method more robust and applying our method to light soures whih drastially stay off the blak body radiator. REFERENCES Fig. 7. Input images for experiment 2. Sr sene Dst sene Illumination hromatiity is estimated by using eah segmented region inluding not only human region, but also bakground area. The number of segmented region for hromatiity estimation is 48, and regions whose size is less than 1 pixels is exluded in the illumination hromatiity estimation. Sine we don t onsider the illumination intensity mathing, the brightness of sr sene is adjusted manually. B. Experiment result The result images of Pattern 1 are shown in Figure 8. Illumination hromatiity for a man standing on the left side and that of bakground sene is different in result without hromatiity adjustment (Figure 8) omparing to the ground truth whih shows the target person atually standing in dst sene. Applying our method, the final result ahieved illumination hromatiity onsisteny between a superimposed and bakground sene. Fousing on a pants of the superimposed person, we an say that the hromatiity mathing proess is done orretly. As shown in Figure 8 and (e), eah line is obtained from pixel values from eah segmented area. They show us that we ould estimate the hromatiity from multiple region whih labeled as different olor region. [1] S. A. Shafer, Using olor to separate refletion omponents. Color Researh & Appliation, vol. 1 no. 4, pp , [2] G. J. Klinker, S. A. Shafer, and T. Kanade, The measurement of highlights in olor images. International Journal of Computer Vision, vol. 2 no.1, pp.7-32, [3] T. M. Lehmann and C. Palm, Color line searh for illuminant estimation in real-world senes. Journal of the Optial Soiety of Ameria A, vol. 18 no.11, pp , 21. [4] G. D. Finlayson and G. Shaefer, Solving for olour onstany using a onstrained dihromati refletion model. International Journal of Computer Vision, vol. 43 no. 3, pp , 21. [5] M. Ebner and C. Herrmann, On determining the olor of the illuminant using the dihromati refletion model. Pattern Reognition, pp.1 8, 25. [6] J. Tajima, Illumination hromatiity estimation based on dihromati refletion model and imperfet segmentation. Computational Color Imaging, pp.51-61, 29. [7] B. Kang and O. Moon and C. Hong and H. Lee and B. Cho and Y. Kim, Design of advaned olor - Temperature ontrol system for HDTV appliations. Journal of the Korean Physial Soiety, 41.6, pp , 22. [8] C. Rother and V. Kolmogorov, and A. Blake. Grabut: Interative foreground extration using iterated graph uts. ACM Transations on Graphis (TOG), vol. 23 no. 3, pp ,
 Ground truth Estimated hromatiity on")
 () (f) Fig. 9. Results for experiment 1.")
5 () (e) (f) Fig. 8. Results for experiment 1. Result image Result without hromatiity adjustment () Ground truth Estimated hromatiity on Sr sene (e) Estimated hromatiity on Dst sene (f) Chromatiity mathing, a irle for sr hromatiity and an asterisk for dst hromatiity (e) () (f) Fig. 9. Results for experiment 1. Result image Result without hromatiity adjustment () Ground truth Estimated hromatiity on Sr sene (e) Estimated hromatiity on Dst sene (f) Chromatiity mathing, a irle for sr hromatiity and an asterisk for dst hromatiity -145-
FUZZY WATERSHED FOR IMAGE SEGMENTATION
 FUZZY WATERSHED FOR IMAGE SEGMENTATION Ramón Moreno, Manuel Graña Computational Intelligene Group, Universidad del País Vaso, Spain http://www.ehu.es/winto; {ramon.moreno,manuel.grana}@ehu.es Abstrat The
FUZZY WATERSHED FOR IMAGE SEGMENTATION Ramón Moreno, Manuel Graña Computational Intelligene Group, Universidad del País Vaso, Spain http://www.ehu.es/winto; {ramon.moreno,manuel.grana}@ehu.es Abstrat The
Performance of Histogram-Based Skin Colour Segmentation for Arms Detection in Human Motion Analysis Application
 World Aademy of Siene, Engineering and Tehnology 8 009 Performane of Histogram-Based Skin Colour Segmentation for Arms Detetion in Human Motion Analysis Appliation Rosalyn R. Porle, Ali Chekima, Farrah
World Aademy of Siene, Engineering and Tehnology 8 009 Performane of Histogram-Based Skin Colour Segmentation for Arms Detetion in Human Motion Analysis Appliation Rosalyn R. Porle, Ali Chekima, Farrah
Video Data and Sonar Data: Real World Data Fusion Example
 14th International Conferene on Information Fusion Chiago, Illinois, USA, July 5-8, 2011 Video Data and Sonar Data: Real World Data Fusion Example David W. Krout Applied Physis Lab dkrout@apl.washington.edu
14th International Conferene on Information Fusion Chiago, Illinois, USA, July 5-8, 2011 Video Data and Sonar Data: Real World Data Fusion Example David W. Krout Applied Physis Lab dkrout@apl.washington.edu
PARAMETRIC SAR IMAGE FORMATION - A PROMISING APPROACH TO RESOLUTION-UNLIMITED IMAGING. Yesheng Gao, Kaizhi Wang, Xingzhao Liu
 20th European Signal Proessing Conferene EUSIPCO 2012) Buharest, Romania, August 27-31, 2012 PARAMETRIC SAR IMAGE FORMATION - A PROMISING APPROACH TO RESOLUTION-UNLIMITED IMAGING Yesheng Gao, Kaizhi Wang,
20th European Signal Proessing Conferene EUSIPCO 2012) Buharest, Romania, August 27-31, 2012 PARAMETRIC SAR IMAGE FORMATION - A PROMISING APPROACH TO RESOLUTION-UNLIMITED IMAGING Yesheng Gao, Kaizhi Wang,
Comparing Images Under Variable Illumination
 ( This paper appeared in CVPR 8. IEEE ) Comparing Images Under Variable Illumination David W. Jaobs Peter N. Belhumeur Ronen Basri NEC Researh Institute Center for Computational Vision and Control The
( This paper appeared in CVPR 8. IEEE ) Comparing Images Under Variable Illumination David W. Jaobs Peter N. Belhumeur Ronen Basri NEC Researh Institute Center for Computational Vision and Control The
timestamp, if silhouette(x, y) 0 0 if silhouette(x, y) = 0, mhi(x, y) = and mhi(x, y) < timestamp - duration mhi(x, y), else
 0 0 if silhouette(x, y) = 0, mhi(x, y) = and mhi(x, y) < timestamp - duration mhi(x, y), else") 3rd International Conferene on Multimedia Tehnolog(ICMT 013) An Effiient Moving Target Traking Strateg Based on OpenCV and CAMShift Theor Dongu Li 1 Abstrat Image movement involved bakground movement and
3rd International Conferene on Multimedia Tehnolog(ICMT 013) An Effiient Moving Target Traking Strateg Based on OpenCV and CAMShift Theor Dongu Li 1 Abstrat Image movement involved bakground movement and
Smooth Trajectory Planning Along Bezier Curve for Mobile Robots with Velocity Constraints
 Smooth Trajetory Planning Along Bezier Curve for Mobile Robots with Veloity Constraints Gil Jin Yang and Byoung Wook Choi Department of Eletrial and Information Engineering Seoul National University of
Smooth Trajetory Planning Along Bezier Curve for Mobile Robots with Veloity Constraints Gil Jin Yang and Byoung Wook Choi Department of Eletrial and Information Engineering Seoul National University of
A Novel Validity Index for Determination of the Optimal Number of Clusters
 IEICE TRANS. INF. & SYST., VOL.E84 D, NO.2 FEBRUARY 2001 281 LETTER A Novel Validity Index for Determination of the Optimal Number of Clusters Do-Jong KIM, Yong-Woon PARK, and Dong-Jo PARK, Nonmembers
IEICE TRANS. INF. & SYST., VOL.E84 D, NO.2 FEBRUARY 2001 281 LETTER A Novel Validity Index for Determination of the Optimal Number of Clusters Do-Jong KIM, Yong-Woon PARK, and Dong-Jo PARK, Nonmembers
arxiv: v1 [cs.db] 13 Sep 2017
![arxiv: v1 [cs.db] 13 Sep 2017](/thumbs/96/126543346.jpg "arxiv: v1 [cs.db] 13 Sep 2017") An effiient lustering algorithm from the measure of loal Gaussian distribution Yuan-Yen Tai (Dated: May 27, 2018) In this paper, I will introdue a fast and novel lustering algorithm based on Gaussian distribution
An effiient lustering algorithm from the measure of loal Gaussian distribution Yuan-Yen Tai (Dated: May 27, 2018) In this paper, I will introdue a fast and novel lustering algorithm based on Gaussian distribution
Rotation Invariant Spherical Harmonic Representation of 3D Shape Descriptors
 Eurographis Symposium on Geometry Proessing (003) L. Kobbelt, P. Shröder, H. Hoppe (Editors) Rotation Invariant Spherial Harmoni Representation of 3D Shape Desriptors Mihael Kazhdan, Thomas Funkhouser,
Eurographis Symposium on Geometry Proessing (003) L. Kobbelt, P. Shröder, H. Hoppe (Editors) Rotation Invariant Spherial Harmoni Representation of 3D Shape Desriptors Mihael Kazhdan, Thomas Funkhouser,
Detection and Recognition of Non-Occluded Objects using Signature Map
 6th WSEAS International Conferene on CIRCUITS, SYSTEMS, ELECTRONICS,CONTROL & SIGNAL PROCESSING, Cairo, Egypt, De 9-31, 007 65 Detetion and Reognition of Non-Oluded Objets using Signature Map Sangbum Park,
6th WSEAS International Conferene on CIRCUITS, SYSTEMS, ELECTRONICS,CONTROL & SIGNAL PROCESSING, Cairo, Egypt, De 9-31, 007 65 Detetion and Reognition of Non-Oluded Objets using Signature Map Sangbum Park,
Supplementary Material: Geometric Calibration of Micro-Lens-Based Light-Field Cameras using Line Features
 Supplementary Material: Geometri Calibration of Miro-Lens-Based Light-Field Cameras using Line Features Yunsu Bok, Hae-Gon Jeon and In So Kweon KAIST, Korea As the supplementary material, we provide detailed
Supplementary Material: Geometri Calibration of Miro-Lens-Based Light-Field Cameras using Line Features Yunsu Bok, Hae-Gon Jeon and In So Kweon KAIST, Korea As the supplementary material, we provide detailed
Gray Codes for Reflectable Languages
 Gray Codes for Refletable Languages Yue Li Joe Sawada Marh 8, 2008 Abstrat We lassify a type of language alled a refletable language. We then develop a generi algorithm that an be used to list all strings
Gray Codes for Refletable Languages Yue Li Joe Sawada Marh 8, 2008 Abstrat We lassify a type of language alled a refletable language. We then develop a generi algorithm that an be used to list all strings
A radiometric analysis of projected sinusoidal illumination for opaque surfaces
 University of Virginia tehnial report CS-21-7 aompanying A Coaxial Optial Sanner for Synhronous Aquisition of 3D Geometry and Surfae Refletane A radiometri analysis of projeted sinusoidal illumination
University of Virginia tehnial report CS-21-7 aompanying A Coaxial Optial Sanner for Synhronous Aquisition of 3D Geometry and Surfae Refletane A radiometri analysis of projeted sinusoidal illumination
Improving the Perceptual Uniformity of a Gloss Space
 Improving the Pereptual Uniformity of a Gloss Spae Adria Fores, 1 Mark D. Fairhild, 1 Ingeborg Tastl 2 1 Munsell Color Siene Laboratory, Rohester Institute of Tehnology 2 Hewlett-Pakard Laboratories Abstrat
Improving the Pereptual Uniformity of a Gloss Spae Adria Fores, 1 Mark D. Fairhild, 1 Ingeborg Tastl 2 1 Munsell Color Siene Laboratory, Rohester Institute of Tehnology 2 Hewlett-Pakard Laboratories Abstrat
FOREGROUND OBJECT EXTRACTION USING FUZZY C MEANS WITH BIT-PLANE SLICING AND OPTICAL FLOW
 FOREGROUND OBJECT EXTRACTION USING FUZZY C EANS WITH BIT-PLANE SLICING AND OPTICAL FLOW SIVAGAI., REVATHI.T, JEGANATHAN.L 3 APSG, SCSE, VIT University, Chennai, India JRF, DST, Dehi, India. 3 Professor,
FOREGROUND OBJECT EXTRACTION USING FUZZY C EANS WITH BIT-PLANE SLICING AND OPTICAL FLOW SIVAGAI., REVATHI.T, JEGANATHAN.L 3 APSG, SCSE, VIT University, Chennai, India JRF, DST, Dehi, India. 3 Professor,
Improved Vehicle Classification in Long Traffic Video by Cooperating Tracker and Classifier Modules
 Improved Vehile Classifiation in Long Traffi Video by Cooperating Traker and Classifier Modules Brendan Morris and Mohan Trivedi University of California, San Diego San Diego, CA 92093 {b1morris, trivedi}@usd.edu
Improved Vehile Classifiation in Long Traffi Video by Cooperating Traker and Classifier Modules Brendan Morris and Mohan Trivedi University of California, San Diego San Diego, CA 92093 {b1morris, trivedi}@usd.edu
BioTechnology. An Indian Journal FULL PAPER. Trade Science Inc. Improvement of low illumination image enhancement algorithm based on physical mode
 [Type text] [Type text] [Type text] ISSN : 0974-7435 Volume 10 Issue 22 BioTehnology 2014 An Indian Journal FULL PAPER BTAIJ, 10(22), 2014 [13995-14001] Improvement of low illumination image enhanement
[Type text] [Type text] [Type text] ISSN : 0974-7435 Volume 10 Issue 22 BioTehnology 2014 An Indian Journal FULL PAPER BTAIJ, 10(22), 2014 [13995-14001] Improvement of low illumination image enhanement
Graph-Based vs Depth-Based Data Representation for Multiview Images
 Graph-Based vs Depth-Based Data Representation for Multiview Images Thomas Maugey, Antonio Ortega, Pasal Frossard Signal Proessing Laboratory (LTS), Eole Polytehnique Fédérale de Lausanne (EPFL) Email:
Graph-Based vs Depth-Based Data Representation for Multiview Images Thomas Maugey, Antonio Ortega, Pasal Frossard Signal Proessing Laboratory (LTS), Eole Polytehnique Fédérale de Lausanne (EPFL) Email:
Detecting Moving Targets in Clutter in Airborne SAR via Keystoning and Multiple Phase Center Interferometry
 Deteting Moving Targets in Clutter in Airborne SAR via Keystoning and Multiple Phase Center Interferometry D. M. Zasada, P. K. Sanyal The MITRE Corp., 6 Eletroni Parkway, Rome, NY 134 (dmzasada, psanyal)@mitre.org
Deteting Moving Targets in Clutter in Airborne SAR via Keystoning and Multiple Phase Center Interferometry D. M. Zasada, P. K. Sanyal The MITRE Corp., 6 Eletroni Parkway, Rome, NY 134 (dmzasada, psanyal)@mitre.org
Orientation of the coordinate system
 Orientation of the oordinate system Right-handed oordinate system: -axis by a positive, around the -axis. The -axis is mapped to the i.e., antilokwise, rotation of The -axis is mapped to the -axis by a
Orientation of the oordinate system Right-handed oordinate system: -axis by a positive, around the -axis. The -axis is mapped to the i.e., antilokwise, rotation of The -axis is mapped to the -axis by a
Color Image Fusion for Concealed Weapon Detection
 In: E.M. Carapezza (Ed.), Sensors, and ommand, ontrol, ommuniations, and intelligene (C3I) tehnologies for homeland defense and law enforement II, SPIE-571 (pp. 372-379). Bellingham, WA., USA: The International
In: E.M. Carapezza (Ed.), Sensors, and ommand, ontrol, ommuniations, and intelligene (C3I) tehnologies for homeland defense and law enforement II, SPIE-571 (pp. 372-379). Bellingham, WA., USA: The International
On - Line Path Delay Fault Testing of Omega MINs M. Bellos 1, E. Kalligeros 1, D. Nikolos 1,2 & H. T. Vergos 1,2
 On - Line Path Delay Fault Testing of Omega MINs M. Bellos, E. Kalligeros, D. Nikolos,2 & H. T. Vergos,2 Dept. of Computer Engineering and Informatis 2 Computer Tehnology Institute University of Patras,
On - Line Path Delay Fault Testing of Omega MINs M. Bellos, E. Kalligeros, D. Nikolos,2 & H. T. Vergos,2 Dept. of Computer Engineering and Informatis 2 Computer Tehnology Institute University of Patras,
SEGMENTATION OF IMAGERY USING NETWORK SNAKES
 SEGMENTATION OF IMAGERY USING NETWORK SNAKES Matthias Butenuth Institute of Photogrammetry and GeoInformation, Leibniz Universität Hannover Nienburger Str. 1, 30167 Hannover, Germany butenuth@ipi.uni-hannover.de
SEGMENTATION OF IMAGERY USING NETWORK SNAKES Matthias Butenuth Institute of Photogrammetry and GeoInformation, Leibniz Universität Hannover Nienburger Str. 1, 30167 Hannover, Germany butenuth@ipi.uni-hannover.de
Extracting Partition Statistics from Semistructured Data
 Extrating Partition Statistis from Semistrutured Data John N. Wilson Rihard Gourlay Robert Japp Mathias Neumüller Department of Computer and Information Sienes University of Strathlyde, Glasgow, UK {jnw,rsg,rpj,mathias}@is.strath.a.uk
Extrating Partition Statistis from Semistrutured Data John N. Wilson Rihard Gourlay Robert Japp Mathias Neumüller Department of Computer and Information Sienes University of Strathlyde, Glasgow, UK {jnw,rsg,rpj,mathias}@is.strath.a.uk
IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 49, NO. 6, JUNE
 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 49, NO. 6, JUNE 2011 2049 Adaptive Shadow Detetion Using a Blakbody Radiator Model Aliaksei Makarau, Rudolf Rihter, Rupert Müller, and Peter Reinartz
IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 49, NO. 6, JUNE 2011 2049 Adaptive Shadow Detetion Using a Blakbody Radiator Model Aliaksei Makarau, Rudolf Rihter, Rupert Müller, and Peter Reinartz
ASSESSMENT OF TWO CHEAP CLOSE-RANGE FEATURE EXTRACTION SYSTEMS
 ASSESSMENT OF TWO CHEAP CLOSE-RANGE FEATURE EXTRACTION SYSTEMS Ahmed Elaksher a, Mohammed Elghazali b, Ashraf Sayed b, and Yasser Elmanadilli b a Shool of Civil Engineering, Purdue University, West Lafayette,
ASSESSMENT OF TWO CHEAP CLOSE-RANGE FEATURE EXTRACTION SYSTEMS Ahmed Elaksher a, Mohammed Elghazali b, Ashraf Sayed b, and Yasser Elmanadilli b a Shool of Civil Engineering, Purdue University, West Lafayette,
Drawing lines. Naïve line drawing algorithm. drawpixel(x, round(y)); double dy = y1 - y0; double dx = x1 - x0; double m = dy / dx; double y = y0;
); double dy = y1 - y0; double dx = x1 - x0; double m = dy / dx; double y = y0;") Naïve line drawing algorithm // Connet to grid points(x0,y0) and // (x1,y1) by a line. void drawline(int x0, int y0, int x1, int y1) { int x; double dy = y1 - y0; double dx = x1 - x0; double m = dy / dx;
Naïve line drawing algorithm // Connet to grid points(x0,y0) and // (x1,y1) by a line. void drawline(int x0, int y0, int x1, int y1) { int x; double dy = y1 - y0; double dx = x1 - x0; double m = dy / dx;
Approximate logic synthesis for error tolerant applications
 Approximate logi synthesis for error tolerant appliations Doohul Shin and Sandeep K. Gupta Eletrial Engineering Department, University of Southern California, Los Angeles, CA 989 {doohuls, sandeep}@us.edu
Approximate logi synthesis for error tolerant appliations Doohul Shin and Sandeep K. Gupta Eletrial Engineering Department, University of Southern California, Los Angeles, CA 989 {doohuls, sandeep}@us.edu
Capturing Large Intra-class Variations of Biometric Data by Template Co-updating
 Capturing Large Intra-lass Variations of Biometri Data by Template Co-updating Ajita Rattani University of Cagliari Piazza d'armi, Cagliari, Italy ajita.rattani@diee.unia.it Gian Lua Marialis University
Capturing Large Intra-lass Variations of Biometri Data by Template Co-updating Ajita Rattani University of Cagliari Piazza d'armi, Cagliari, Italy ajita.rattani@diee.unia.it Gian Lua Marialis University
the data. Structured Principal Component Analysis (SPCA)
") Strutured Prinipal Component Analysis Kristin M. Branson and Sameer Agarwal Department of Computer Siene and Engineering University of California, San Diego La Jolla, CA 9193-114 Abstrat Many tasks involving
Strutured Prinipal Component Analysis Kristin M. Branson and Sameer Agarwal Department of Computer Siene and Engineering University of California, San Diego La Jolla, CA 9193-114 Abstrat Many tasks involving
A scheme for racquet sports video analysis with the combination of audio-visual information
 A sheme for raquet sports video analysis with the ombination of audio-visual information Liyuan Xing a*, Qixiang Ye b, Weigang Zhang, Qingming Huang a and Hua Yu a a Graduate Shool of the Chinese Aadamy
A sheme for raquet sports video analysis with the ombination of audio-visual information Liyuan Xing a*, Qixiang Ye b, Weigang Zhang, Qingming Huang a and Hua Yu a a Graduate Shool of the Chinese Aadamy
A DYNAMIC ACCESS CONTROL WITH BINARY KEY-PAIR
 Malaysian Journal of Computer Siene, Vol 10 No 1, June 1997, pp 36-41 A DYNAMIC ACCESS CONTROL WITH BINARY KEY-PAIR Md Rafiqul Islam, Harihodin Selamat and Mohd Noor Md Sap Faulty of Computer Siene and
Malaysian Journal of Computer Siene, Vol 10 No 1, June 1997, pp 36-41 A DYNAMIC ACCESS CONTROL WITH BINARY KEY-PAIR Md Rafiqul Islam, Harihodin Selamat and Mohd Noor Md Sap Faulty of Computer Siene and
特集 Road Border Recognition Using FIR Images and LIDAR Signal Processing
 デンソーテクニカルレビュー Vol. 15 2010 特集 Road Border Reognition Using FIR Images and LIDAR Signal Proessing 高木聖和 バーゼル ファルディ Kiyokazu TAKAGI Basel Fardi ヘンドリック ヴァイゲル Hendrik Weigel ゲルド ヴァニーリック Gerd Wanielik This paper
デンソーテクニカルレビュー Vol. 15 2010 特集 Road Border Reognition Using FIR Images and LIDAR Signal Proessing 高木聖和 バーゼル ファルディ Kiyokazu TAKAGI Basel Fardi ヘンドリック ヴァイゲル Hendrik Weigel ゲルド ヴァニーリック Gerd Wanielik This paper
Cross-layer Resource Allocation on Broadband Power Line Based on Novel QoS-priority Scheduling Function in MAC Layer
 Communiations and Networ, 2013, 5, 69-73 http://dx.doi.org/10.4236/n.2013.53b2014 Published Online September 2013 (http://www.sirp.org/journal/n) Cross-layer Resoure Alloation on Broadband Power Line Based
Communiations and Networ, 2013, 5, 69-73 http://dx.doi.org/10.4236/n.2013.53b2014 Published Online September 2013 (http://www.sirp.org/journal/n) Cross-layer Resoure Alloation on Broadband Power Line Based
Lecture 02 Image Formation
 Institute of Informatis Institute of Neuroinformatis Leture 2 Image Formation Davide Saramuzza Outline of this leture Image Formation Other amera parameters Digital amera Perspetive amera model Lens distortion
Institute of Informatis Institute of Neuroinformatis Leture 2 Image Formation Davide Saramuzza Outline of this leture Image Formation Other amera parameters Digital amera Perspetive amera model Lens distortion
Multi-Piece Mold Design Based on Linear Mixed-Integer Program Toward Guaranteed Optimality
 INTERNATIONAL CONFERENCE ON MANUFACTURING AUTOMATION (ICMA200) Multi-Piee Mold Design Based on Linear Mixed-Integer Program Toward Guaranteed Optimality Stephen Stoyan, Yong Chen* Epstein Department of
INTERNATIONAL CONFERENCE ON MANUFACTURING AUTOMATION (ICMA200) Multi-Piee Mold Design Based on Linear Mixed-Integer Program Toward Guaranteed Optimality Stephen Stoyan, Yong Chen* Epstein Department of
Volume 3, Issue 9, September 2013 International Journal of Advanced Research in Computer Science and Software Engineering
 Volume 3, Issue 9, September 2013 ISSN: 2277 128X International Journal of Advaned Researh in Computer Siene and Software Engineering Researh Paper Available online at: www.ijarsse.om A New-Fangled Algorithm
Volume 3, Issue 9, September 2013 ISSN: 2277 128X International Journal of Advaned Researh in Computer Siene and Software Engineering Researh Paper Available online at: www.ijarsse.om A New-Fangled Algorithm
Chemical, Biological and Radiological Hazard Assessment: A New Model of a Plume in a Complex Urban Environment
 hemial, Biologial and Radiologial Haard Assessment: A New Model of a Plume in a omplex Urban Environment Skvortsov, A.T., P.D. Dawson, M.D. Roberts and R.M. Gailis HPP Division, Defene Siene and Tehnology
hemial, Biologial and Radiologial Haard Assessment: A New Model of a Plume in a omplex Urban Environment Skvortsov, A.T., P.D. Dawson, M.D. Roberts and R.M. Gailis HPP Division, Defene Siene and Tehnology
KERNEL SPARSE REPRESENTATION WITH LOCAL PATTERNS FOR FACE RECOGNITION
 KERNEL SPARSE REPRESENTATION WITH LOCAL PATTERNS FOR FACE RECOGNITION Cuiui Kang 1, Shengai Liao, Shiming Xiang 1, Chunhong Pan 1 1 National Laboratory of Pattern Reognition, Institute of Automation, Chinese
KERNEL SPARSE REPRESENTATION WITH LOCAL PATTERNS FOR FACE RECOGNITION Cuiui Kang 1, Shengai Liao, Shiming Xiang 1, Chunhong Pan 1 1 National Laboratory of Pattern Reognition, Institute of Automation, Chinese
Particle Swarm Optimization for the Design of High Diffraction Efficient Holographic Grating
 Original Artile Partile Swarm Optimization for the Design of High Diffration Effiient Holographi Grating A.K. Tripathy 1, S.K. Das, M. Sundaray 3 and S.K. Tripathy* 4 1, Department of Computer Siene, Berhampur
Original Artile Partile Swarm Optimization for the Design of High Diffration Effiient Holographi Grating A.K. Tripathy 1, S.K. Das, M. Sundaray 3 and S.K. Tripathy* 4 1, Department of Computer Siene, Berhampur
Fuzzy Meta Node Fuzzy Metagraph and its Cluster Analysis
 Journal of Computer Siene 4 (): 9-97, 008 ISSN 549-3636 008 Siene Publiations Fuzzy Meta Node Fuzzy Metagraph and its Cluster Analysis Deepti Gaur, Aditya Shastri and Ranjit Biswas Department of Computer
Journal of Computer Siene 4 (): 9-97, 008 ISSN 549-3636 008 Siene Publiations Fuzzy Meta Node Fuzzy Metagraph and its Cluster Analysis Deepti Gaur, Aditya Shastri and Ranjit Biswas Department of Computer
Boundary Correct Real-Time Soft Shadows
 Boundary Corret Real-Time Soft Shadows Bjarke Jakobsen Niels J. Christensen Bent D. Larsen Kim S. Petersen Informatis and Mathematial Modelling Tehnial University of Denmark {bj, nj, bdl}@imm.dtu.dk, kim@deadline.dk
Boundary Corret Real-Time Soft Shadows Bjarke Jakobsen Niels J. Christensen Bent D. Larsen Kim S. Petersen Informatis and Mathematial Modelling Tehnial University of Denmark {bj, nj, bdl}@imm.dtu.dk, kim@deadline.dk
Gradient based progressive probabilistic Hough transform
 Gradient based progressive probabilisti Hough transform C.Galambos, J.Kittler and J.Matas Abstrat: The authors look at the benefits of exploiting gradient information to enhane the progressive probabilisti
Gradient based progressive probabilisti Hough transform C.Galambos, J.Kittler and J.Matas Abstrat: The authors look at the benefits of exploiting gradient information to enhane the progressive probabilisti
Semi-Supervised Affinity Propagation with Instance-Level Constraints
 Semi-Supervised Affinity Propagation with Instane-Level Constraints Inmar E. Givoni, Brendan J. Frey Probabilisti and Statistial Inferene Group University of Toronto 10 King s College Road, Toronto, Ontario,
Semi-Supervised Affinity Propagation with Instane-Level Constraints Inmar E. Givoni, Brendan J. Frey Probabilisti and Statistial Inferene Group University of Toronto 10 King s College Road, Toronto, Ontario,
Hitachi Ltd., Production Engineering Research Lab. ABSTRACT
 Real-time omputation of depth from defous Masahiro Watanabe, Shree K.Nayar y and Minori Noguhi Hitahi Ltd., Prodution Engineering Researh Lab. 292 Yoshida-ho, Totsuka, Yokohama 244, Japan y Columbia University,
Real-time omputation of depth from defous Masahiro Watanabe, Shree K.Nayar y and Minori Noguhi Hitahi Ltd., Prodution Engineering Researh Lab. 292 Yoshida-ho, Totsuka, Yokohama 244, Japan y Columbia University,
Exploiting Enriched Contextual Information for Mobile App Classification
 Exploiting Enrihed Contextual Information for Mobile App Classifiation Hengshu Zhu 1 Huanhuan Cao 2 Enhong Chen 1 Hui Xiong 3 Jilei Tian 2 1 University of Siene and Tehnology of China 2 Nokia Researh Center
Exploiting Enrihed Contextual Information for Mobile App Classifiation Hengshu Zhu 1 Huanhuan Cao 2 Enhong Chen 1 Hui Xiong 3 Jilei Tian 2 1 University of Siene and Tehnology of China 2 Nokia Researh Center
with respect to the normal in each medium, respectively. The question is: How are θ
 Prof. Raghuveer Parthasarathy University of Oregon Physis 35 Winter 8 3 R EFRACTION When light travels from one medium to another, it may hange diretion. This phenomenon familiar whenever we see the bent
Prof. Raghuveer Parthasarathy University of Oregon Physis 35 Winter 8 3 R EFRACTION When light travels from one medium to another, it may hange diretion. This phenomenon familiar whenever we see the bent
Evolutionary Feature Synthesis for Image Databases
 Evolutionary Feature Synthesis for Image Databases Anlei Dong, Bir Bhanu, Yingqiang Lin Center for Researh in Intelligent Systems University of California, Riverside, California 92521, USA {adong, bhanu,
Evolutionary Feature Synthesis for Image Databases Anlei Dong, Bir Bhanu, Yingqiang Lin Center for Researh in Intelligent Systems University of California, Riverside, California 92521, USA {adong, bhanu,
Colouring contact graphs of squares and rectilinear polygons de Berg, M.T.; Markovic, A.; Woeginger, G.
 Colouring ontat graphs of squares and retilinear polygons de Berg, M.T.; Markovi, A.; Woeginger, G. Published in: nd European Workshop on Computational Geometry (EuroCG 06), 0 Marh - April, Lugano, Switzerland
Colouring ontat graphs of squares and retilinear polygons de Berg, M.T.; Markovi, A.; Woeginger, G. Published in: nd European Workshop on Computational Geometry (EuroCG 06), 0 Marh - April, Lugano, Switzerland
NONLINEAR BACK PROJECTION FOR TOMOGRAPHIC IMAGE RECONSTRUCTION. Ken Sauer and Charles A. Bouman
 NONLINEAR BACK PROJECTION FOR TOMOGRAPHIC IMAGE RECONSTRUCTION Ken Sauer and Charles A. Bouman Department of Eletrial Engineering, University of Notre Dame Notre Dame, IN 46556, (219) 631-6999 Shool of
NONLINEAR BACK PROJECTION FOR TOMOGRAPHIC IMAGE RECONSTRUCTION Ken Sauer and Charles A. Bouman Department of Eletrial Engineering, University of Notre Dame Notre Dame, IN 46556, (219) 631-6999 Shool of
Measurement of the stereoscopic rangefinder beam angular velocity using the digital image processing method
 Measurement of the stereosopi rangefinder beam angular veloity using the digital image proessing method ROMAN VÍTEK Department of weapons and ammunition University of defense Kouniova 65, 62 Brno CZECH
Measurement of the stereosopi rangefinder beam angular veloity using the digital image proessing method ROMAN VÍTEK Department of weapons and ammunition University of defense Kouniova 65, 62 Brno CZECH
And, the (low-pass) Butterworth filter of order m is given in the frequency domain by
 Butterworth filter of order m is given in the frequency domain by") Problem Set no.3.a) The ideal low-pass filter is given in the frequeny domain by B ideal ( f ), f f; =, f > f. () And, the (low-pass) Butterworth filter of order m is given in the frequeny domain by B
Problem Set no.3.a) The ideal low-pass filter is given in the frequeny domain by B ideal ( f ), f f; =, f > f. () And, the (low-pass) Butterworth filter of order m is given in the frequeny domain by B
The Minimum Redundancy Maximum Relevance Approach to Building Sparse Support Vector Machines
 The Minimum Redundany Maximum Relevane Approah to Building Sparse Support Vetor Mahines Xiaoxing Yang, Ke Tang, and Xin Yao, Nature Inspired Computation and Appliations Laboratory (NICAL), Shool of Computer
The Minimum Redundany Maximum Relevane Approah to Building Sparse Support Vetor Mahines Xiaoxing Yang, Ke Tang, and Xin Yao, Nature Inspired Computation and Appliations Laboratory (NICAL), Shool of Computer
An Extended Wavenumber-Domain Algorithm Combined with Two-Step Motion Compensation for Bistatic Forward-Looking SAR
 Progress In Eletromagnetis Researh Letters, Vol. 63, 85 92, 2016 An Extended Wavenumber-Domain Algorithm Combined with Two-Step Motion Compensation for Bistati Forward-Looking SAR Yuebo Zha 1, * and Wei
Progress In Eletromagnetis Researh Letters, Vol. 63, 85 92, 2016 An Extended Wavenumber-Domain Algorithm Combined with Two-Step Motion Compensation for Bistati Forward-Looking SAR Yuebo Zha 1, * and Wei
Discrete sequential models and CRFs. 1 Case Study: Supervised Part-of-Speech Tagging
 0-708: Probabilisti Graphial Models 0-708, Spring 204 Disrete sequential models and CRFs Leturer: Eri P. Xing Sribes: Pankesh Bamotra, Xuanhong Li Case Study: Supervised Part-of-Speeh Tagging The supervised
0-708: Probabilisti Graphial Models 0-708, Spring 204 Disrete sequential models and CRFs Leturer: Eri P. Xing Sribes: Pankesh Bamotra, Xuanhong Li Case Study: Supervised Part-of-Speeh Tagging The supervised
Cell Projection of Convex Polyhedra
 Volume Graphis (2003) I. Fujishiro, K. Mueller, A. Kaufman (Editors) Cell Projetion of Convex Polyhedra Stefan Roettger and Thomas Ertl Visualization and Interative Systems Group University of Stuttgart
Volume Graphis (2003) I. Fujishiro, K. Mueller, A. Kaufman (Editors) Cell Projetion of Convex Polyhedra Stefan Roettger and Thomas Ertl Visualization and Interative Systems Group University of Stuttgart
Accurate Image Based Relighting through Optimization
 Thirteenth Eurographis Workshop on Rendering (2002) P. Debeve and S. Gibson (Editors) Aurate Image Based Relighting through Optimization Pieter Peers Philip Dutré Department of Computer Siene, K.U.Leuven,
Thirteenth Eurographis Workshop on Rendering (2002) P. Debeve and S. Gibson (Editors) Aurate Image Based Relighting through Optimization Pieter Peers Philip Dutré Department of Computer Siene, K.U.Leuven,
A RAY TRACING SIMULATION OF SOUND DIFFRACTION BASED ON ANALYTIC SECONDARY SOURCE MODEL
 19th European Signal Proessing Conferene (EUSIPCO 211) Barelona, Spain, August 29 - September 2, 211 A RAY TRACING SIMULATION OF SOUND DIFFRACTION BASED ON ANALYTIC SECONDARY SOURCE MODEL Masashi Okada,
19th European Signal Proessing Conferene (EUSIPCO 211) Barelona, Spain, August 29 - September 2, 211 A RAY TRACING SIMULATION OF SOUND DIFFRACTION BASED ON ANALYTIC SECONDARY SOURCE MODEL Masashi Okada,
An Automatic Laser Scanning System for Accurate 3D Reconstruction of Indoor Scenes
 An Automati Laser Sanning System for Aurate 3D Reonstrution of Indoor Senes Danrong Li, Honglong Zhang, and Zhan Song Shenzhen Institutes of Advaned Tehnology Chinese Aademy of Sienes Shenzhen, Guangdong
An Automati Laser Sanning System for Aurate 3D Reonstrution of Indoor Senes Danrong Li, Honglong Zhang, and Zhan Song Shenzhen Institutes of Advaned Tehnology Chinese Aademy of Sienes Shenzhen, Guangdong
Finding the Equation of a Straight Line
 Finding the Equation of a Straight Line You should have, before now, ome aross the equation of a straight line, perhaps at shool. Engineers use this equation to help determine how one quantity is related
Finding the Equation of a Straight Line You should have, before now, ome aross the equation of a straight line, perhaps at shool. Engineers use this equation to help determine how one quantity is related
Simultaneous image orientation in GRASS
 Simultaneous image orientation in GRASS Alessandro BERGAMINI, Alfonso VITTI, Paolo ATELLI Dipartimento di Ingegneria Civile e Ambientale, Università degli Studi di Trento, via Mesiano 77, 38 Trento, tel.
Simultaneous image orientation in GRASS Alessandro BERGAMINI, Alfonso VITTI, Paolo ATELLI Dipartimento di Ingegneria Civile e Ambientale, Università degli Studi di Trento, via Mesiano 77, 38 Trento, tel.
3-D IMAGE MODELS AND COMPRESSION - SYNTHETIC HYBRID OR NATURAL FIT?
 3-D IMAGE MODELS AND COMPRESSION - SYNTHETIC HYBRID OR NATURAL FIT? Bernd Girod, Peter Eisert, Marus Magnor, Ekehard Steinbah, Thomas Wiegand Te {girod eommuniations Laboratory, University of Erlangen-Nuremberg
3-D IMAGE MODELS AND COMPRESSION - SYNTHETIC HYBRID OR NATURAL FIT? Bernd Girod, Peter Eisert, Marus Magnor, Ekehard Steinbah, Thomas Wiegand Te {girod eommuniations Laboratory, University of Erlangen-Nuremberg
NOISE is inevitable in any image-capturing process. Even
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 34, NO. 7, JULY 2012 1329 Differene-Based Image Noise Modeling Using Skellam Distribution Youngbae Hwang, Member, IEEE, Jun-Sik Kim,
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 34, NO. 7, JULY 2012 1329 Differene-Based Image Noise Modeling Using Skellam Distribution Youngbae Hwang, Member, IEEE, Jun-Sik Kim,
Machine Vision. Laboratory Exercise Name: Student ID: S
 Mahine Vision 521466S Laoratory Eerise 2011 Name: Student D: General nformation To pass these laoratory works, you should answer all questions (Q.y) with an understandale handwriting either in English
Mahine Vision 521466S Laoratory Eerise 2011 Name: Student D: General nformation To pass these laoratory works, you should answer all questions (Q.y) with an understandale handwriting either in English
MATH STUDENT BOOK. 12th Grade Unit 6
 MATH STUDENT BOOK 12th Grade Unit 6 Unit 6 TRIGONOMETRIC APPLICATIONS MATH 1206 TRIGONOMETRIC APPLICATIONS INTRODUCTION 3 1. TRIGONOMETRY OF OBLIQUE TRIANGLES 5 LAW OF SINES 5 AMBIGUITY AND AREA OF A TRIANGLE
MATH STUDENT BOOK 12th Grade Unit 6 Unit 6 TRIGONOMETRIC APPLICATIONS MATH 1206 TRIGONOMETRIC APPLICATIONS INTRODUCTION 3 1. TRIGONOMETRY OF OBLIQUE TRIANGLES 5 LAW OF SINES 5 AMBIGUITY AND AREA OF A TRIANGLE
Defect Detection and Classification in Ceramic Plates Using Machine Vision and Naïve Bayes Classifier for Computer Aided Manufacturing
 Defet Detetion and Classifiation in Cerami Plates Using Mahine Vision and Naïve Bayes Classifier for Computer Aided Manufaturing 1 Harpreet Singh, 2 Kulwinderpal Singh, 1 Researh Student, 2 Assistant Professor,
Defet Detetion and Classifiation in Cerami Plates Using Mahine Vision and Naïve Bayes Classifier for Computer Aided Manufaturing 1 Harpreet Singh, 2 Kulwinderpal Singh, 1 Researh Student, 2 Assistant Professor,
Fast Rigid Motion Segmentation via Incrementally-Complex Local Models
 Fast Rigid Motion Segmentation via Inrementally-Complex Loal Models Fernando Flores-Mangas Allan D. Jepson Department of Computer Siene, University of Toronto {mangas,jepson}@s.toronto.edu Abstrat The
Fast Rigid Motion Segmentation via Inrementally-Complex Loal Models Fernando Flores-Mangas Allan D. Jepson Department of Computer Siene, University of Toronto {mangas,jepson}@s.toronto.edu Abstrat The
Time delay estimation of reverberant meeting speech: on the use of multichannel linear prediction
 University of Wollongong Researh Online Faulty of Informatis - apers (Arhive) Faulty of Engineering and Information Sienes 7 Time delay estimation of reverberant meeting speeh: on the use of multihannel
University of Wollongong Researh Online Faulty of Informatis - apers (Arhive) Faulty of Engineering and Information Sienes 7 Time delay estimation of reverberant meeting speeh: on the use of multihannel
INTERPOLATED AND WARPED 2-D DIGITAL WAVEGUIDE MESH ALGORITHMS
 Proeedings of the COST G-6 Conferene on Digital Audio Effets (DAFX-), Verona, Italy, Deember 7-9, INTERPOLATED AND WARPED -D DIGITAL WAVEGUIDE MESH ALGORITHMS Vesa Välimäki Lab. of Aoustis and Audio Signal
Proeedings of the COST G-6 Conferene on Digital Audio Effets (DAFX-), Verona, Italy, Deember 7-9, INTERPOLATED AND WARPED -D DIGITAL WAVEGUIDE MESH ALGORITHMS Vesa Välimäki Lab. of Aoustis and Audio Signal
A PROTOTYPE OF INTELLIGENT VIDEO SURVEILLANCE CAMERAS
 INTERNATIONAL JOURNAL OF INFORMATION AND SYSTEMS SCIENCES Volume 1, 3, Number 1, 3, Pages 1-22 365-382 2007 Institute for Sientifi Computing and Information A PROTOTYPE OF INTELLIGENT VIDEO SURVEILLANCE
INTERNATIONAL JOURNAL OF INFORMATION AND SYSTEMS SCIENCES Volume 1, 3, Number 1, 3, Pages 1-22 365-382 2007 Institute for Sientifi Computing and Information A PROTOTYPE OF INTELLIGENT VIDEO SURVEILLANCE
A Novel Bit Level Time Series Representation with Implication of Similarity Search and Clustering
 A Novel Bit Level Time Series Representation with Impliation of Similarity Searh and lustering hotirat Ratanamahatana, Eamonn Keogh, Anthony J. Bagnall 2, and Stefano Lonardi Dept. of omputer Siene & Engineering,
A Novel Bit Level Time Series Representation with Impliation of Similarity Searh and lustering hotirat Ratanamahatana, Eamonn Keogh, Anthony J. Bagnall 2, and Stefano Lonardi Dept. of omputer Siene & Engineering,
The Alpha Torque and Quantum Physics
 The Alpha Torque and Quantum Physis Zhiliang Cao, Henry Cao williamao15000@yahoo.om, henry.gu.ao@gmail.om July 18, 010 Abstrat In the enter of the unierse, there isn t a super massie blak hole or any speifi
The Alpha Torque and Quantum Physis Zhiliang Cao, Henry Cao williamao15000@yahoo.om, henry.gu.ao@gmail.om July 18, 010 Abstrat In the enter of the unierse, there isn t a super massie blak hole or any speifi
Cluster-Based Cumulative Ensembles
 Cluster-Based Cumulative Ensembles Hanan G. Ayad and Mohamed S. Kamel Pattern Analysis and Mahine Intelligene Lab, Eletrial and Computer Engineering, University of Waterloo, Waterloo, Ontario N2L 3G1,
Cluster-Based Cumulative Ensembles Hanan G. Ayad and Mohamed S. Kamel Pattern Analysis and Mahine Intelligene Lab, Eletrial and Computer Engineering, University of Waterloo, Waterloo, Ontario N2L 3G1,
The Mathematics of Simple Ultrasonic 2-Dimensional Sensing
 The Mathematis of Simple Ultrasoni -Dimensional Sensing President, Bitstream Tehnology The Mathematis of Simple Ultrasoni -Dimensional Sensing Introdution Our ompany, Bitstream Tehnology, has been developing
The Mathematis of Simple Ultrasoni -Dimensional Sensing President, Bitstream Tehnology The Mathematis of Simple Ultrasoni -Dimensional Sensing Introdution Our ompany, Bitstream Tehnology, has been developing
Interactive Order-Independent Transparency
 Interative Order-Independent Transpareny Cass Everitt NVIDIA OpenGL Appliations Engineering ass@nvidia.om (a) (b) Figure. These images illustrate orret (a) and inorret (b) rendering of transparent surfaes.
Interative Order-Independent Transpareny Cass Everitt NVIDIA OpenGL Appliations Engineering ass@nvidia.om (a) (b) Figure. These images illustrate orret (a) and inorret (b) rendering of transparent surfaes.
An Effective Hardware Architecture for Bump Mapping Using Angular Operation
 Graphis Hardware (2003) M. Doggett W. Heidrih W. Mark. Shilling (Editors) n Effetive Hardware rhiteture for Bump Mapping Using ngular peration S. G. Lee W. C. Park W. J. Lee T. D. Han and S. B. Yang Department
Graphis Hardware (2003) M. Doggett W. Heidrih W. Mark. Shilling (Editors) n Effetive Hardware rhiteture for Bump Mapping Using ngular peration S. G. Lee W. C. Park W. J. Lee T. D. Han and S. B. Yang Department
Shape Outlier Detection Using Pose Preserving Dynamic Shape Models
 Shape Outlier Detetion Using Pose Preserving Dynami Shape Models Chan-Su Lee Ahmed Elgammal Department of Computer Siene, Rutgers University, Pisataway, NJ 8854 USA CHANSU@CS.RUTGERS.EDU ELGAMMAL@CS.RUTGERS.EDU
Shape Outlier Detetion Using Pose Preserving Dynami Shape Models Chan-Su Lee Ahmed Elgammal Department of Computer Siene, Rutgers University, Pisataway, NJ 8854 USA CHANSU@CS.RUTGERS.EDU ELGAMMAL@CS.RUTGERS.EDU
Cracked Hole Finite Element Modeling
 Craked Hole Finite Element Modeling (E-20-F72) Researh Report Submitted to: Lokheed Martin, Program Manager: Dr. Stephen P. Engelstad Prinipal Investigator: Dr. Rami M. Haj-Ali Shool of Civil and Environmental
Craked Hole Finite Element Modeling (E-20-F72) Researh Report Submitted to: Lokheed Martin, Program Manager: Dr. Stephen P. Engelstad Prinipal Investigator: Dr. Rami M. Haj-Ali Shool of Civil and Environmental
Self-Adaptive Parent to Mean-Centric Recombination for Real-Parameter Optimization
 Self-Adaptive Parent to Mean-Centri Reombination for Real-Parameter Optimization Kalyanmoy Deb and Himanshu Jain Department of Mehanial Engineering Indian Institute of Tehnology Kanpur Kanpur, PIN 86 {deb,hjain}@iitk.a.in
Self-Adaptive Parent to Mean-Centri Reombination for Real-Parameter Optimization Kalyanmoy Deb and Himanshu Jain Department of Mehanial Engineering Indian Institute of Tehnology Kanpur Kanpur, PIN 86 {deb,hjain}@iitk.a.in
Adobe Certified Associate
 Adobe Certified Assoiate About the Adobe Certified Assoiate (ACA) Program The Adobe Certified Assoiate (ACA) program is for graphi designers, Web designers, video prodution designers, and digital professionals
Adobe Certified Assoiate About the Adobe Certified Assoiate (ACA) Program The Adobe Certified Assoiate (ACA) program is for graphi designers, Web designers, video prodution designers, and digital professionals
An Alternative Approach to the Fuzzifier in Fuzzy Clustering to Obtain Better Clustering Results
 An Alternative Approah to the Fuzziier in Fuzzy Clustering to Obtain Better Clustering Results Frank Klawonn Department o Computer Siene University o Applied Sienes BS/WF Salzdahlumer Str. 46/48 D-38302
An Alternative Approah to the Fuzziier in Fuzzy Clustering to Obtain Better Clustering Results Frank Klawonn Department o Computer Siene University o Applied Sienes BS/WF Salzdahlumer Str. 46/48 D-38302
Simulation of Crystallographic Texture and Anisotropie of Polycrystals during Metal Forming with Respect to Scaling Aspects
 Raabe, Roters, Wang Simulation of Crystallographi Texture and Anisotropie of Polyrystals during Metal Forming with Respet to Saling Aspets D. Raabe, F. Roters, Y. Wang Max-Plank-Institut für Eisenforshung,
Raabe, Roters, Wang Simulation of Crystallographi Texture and Anisotropie of Polyrystals during Metal Forming with Respet to Saling Aspets D. Raabe, F. Roters, Y. Wang Max-Plank-Institut für Eisenforshung,
We P9 16 Eigenray Tracing in 3D Heterogeneous Media
 We P9 Eigenray Traing in 3D Heterogeneous Media Z. Koren* (Emerson), I. Ravve (Emerson) Summary Conventional two-point ray traing in a general 3D heterogeneous medium is normally performed by a shooting
We P9 Eigenray Traing in 3D Heterogeneous Media Z. Koren* (Emerson), I. Ravve (Emerson) Summary Conventional two-point ray traing in a general 3D heterogeneous medium is normally performed by a shooting
A Novel Algorithm for Color Space Conversion Model from CMYK to LAB
 JOURNAL OF MULTIMEDIA, VOL. 5, NO., APRIL 59 A Novel Algorithm for Color Spae Conversion Model from CMYK to LAB Juan-li Hu Computer Engineering Department, Zhongshan Polytehni,Zhongshan, China Email: hjlfoxes@6.om
JOURNAL OF MULTIMEDIA, VOL. 5, NO., APRIL 59 A Novel Algorithm for Color Spae Conversion Model from CMYK to LAB Juan-li Hu Computer Engineering Department, Zhongshan Polytehni,Zhongshan, China Email: hjlfoxes@6.om
Weak Dependence on Initialization in Mixture of Linear Regressions
 Proeedings of the International MultiConferene of Engineers and Computer Sientists 8 Vol I IMECS 8, Marh -6, 8, Hong Kong Weak Dependene on Initialization in Mixture of Linear Regressions Ryohei Nakano
Proeedings of the International MultiConferene of Engineers and Computer Sientists 8 Vol I IMECS 8, Marh -6, 8, Hong Kong Weak Dependene on Initialization in Mixture of Linear Regressions Ryohei Nakano
Unsupervised color film restoration using adaptive color equalization
 Unsupervised olor film restoration using adaptive olor equalization A. Rizzi 1, C. Gatta 1, C. Slanzi 1, G. Cioa 2, R. Shettini 2 1 Dipartimento di Tenologie dell Informazione Università degli studi di
Unsupervised olor film restoration using adaptive olor equalization A. Rizzi 1, C. Gatta 1, C. Slanzi 1, G. Cioa 2, R. Shettini 2 1 Dipartimento di Tenologie dell Informazione Università degli studi di
Review (Law of sines and cosine) cosines)
 cosines)") Date:03/7,8/01 Review 6.1-6. Objetive: Apply the onept to use the law of the sines and osines to solve oblique triangles Apply the onept to find areas using the law of sines and osines Agenda: Bell ringer
Date:03/7,8/01 Review 6.1-6. Objetive: Apply the onept to use the law of the sines and osines to solve oblique triangles Apply the onept to find areas using the law of sines and osines Agenda: Bell ringer
Trajectory Tracking Control for A Wheeled Mobile Robot Using Fuzzy Logic Controller
 Trajetory Traking Control for A Wheeled Mobile Robot Using Fuzzy Logi Controller K N FARESS 1 M T EL HAGRY 1 A A EL KOSY 2 1 Eletronis researh institute, Cairo, Egypt 2 Faulty of Engineering, Cairo University,
Trajetory Traking Control for A Wheeled Mobile Robot Using Fuzzy Logi Controller K N FARESS 1 M T EL HAGRY 1 A A EL KOSY 2 1 Eletronis researh institute, Cairo, Egypt 2 Faulty of Engineering, Cairo University,
Bring Your Own Coding Style
 Bring Your Own Coding Style Naoto Ogura, Shinsuke Matsumoto, Hideaki Hata and Shinji Kusumoto Graduate Shool of Information Siene and Tehnology, Osaka University, Japan {n-ogura, shinsuke, kusumoto@ist.osaka-u.a.jp
Bring Your Own Coding Style Naoto Ogura, Shinsuke Matsumoto, Hideaki Hata and Shinji Kusumoto Graduate Shool of Information Siene and Tehnology, Osaka University, Japan {n-ogura, shinsuke, kusumoto@ist.osaka-u.a.jp
IMPROVED FUZZY CLUSTERING METHOD BASED ON INTUITIONISTIC FUZZY PARTICLE SWARM OPTIMIZATION
 Journal of Theoretial and Applied Information Tehnology IMPROVED FUZZY CLUSTERING METHOD BASED ON INTUITIONISTIC FUZZY PARTICLE SWARM OPTIMIZATION V.KUMUTHA, 2 S. PALANIAMMAL D.J. Aademy For Managerial
Journal of Theoretial and Applied Information Tehnology IMPROVED FUZZY CLUSTERING METHOD BASED ON INTUITIONISTIC FUZZY PARTICLE SWARM OPTIMIZATION V.KUMUTHA, 2 S. PALANIAMMAL D.J. Aademy For Managerial
A {k, n}-secret Sharing Scheme for Color Images
 A {k, n}-seret Sharing Sheme for Color Images Rastislav Luka, Konstantinos N. Plataniotis, and Anastasios N. Venetsanopoulos The Edward S. Rogers Sr. Dept. of Eletrial and Computer Engineering, University
A {k, n}-seret Sharing Sheme for Color Images Rastislav Luka, Konstantinos N. Plataniotis, and Anastasios N. Venetsanopoulos The Edward S. Rogers Sr. Dept. of Eletrial and Computer Engineering, University
Flow Demands Oriented Node Placement in Multi-Hop Wireless Networks
 Flow Demands Oriented Node Plaement in Multi-Hop Wireless Networks Zimu Yuan Institute of Computing Tehnology, CAS, China {zimu.yuan}@gmail.om arxiv:153.8396v1 [s.ni] 29 Mar 215 Abstrat In multi-hop wireless
Flow Demands Oriented Node Plaement in Multi-Hop Wireless Networks Zimu Yuan Institute of Computing Tehnology, CAS, China {zimu.yuan}@gmail.om arxiv:153.8396v1 [s.ni] 29 Mar 215 Abstrat In multi-hop wireless
Remote Sensing Image Segmentation Algorithm Based on Multi-agent and Fuzzy Clustering
 017 nd International Conferene on Environental Siene and Energy Engineering (ICESEE 017) ISB: 978-1-60595-417- Reote Sensing Iage Segentation Algorith Based on Multi-agent and Fuzzy Clustering Lei LIU,
017 nd International Conferene on Environental Siene and Energy Engineering (ICESEE 017) ISB: 978-1-60595-417- Reote Sensing Iage Segentation Algorith Based on Multi-agent and Fuzzy Clustering Lei LIU,
Wide-baseline Multiple-view Correspondences
 Wide-baseline Multiple-view Correspondenes Vittorio Ferrari, Tinne Tuytelaars, Lu Van Gool, Computer Vision Group (BIWI), ETH Zuerih, Switzerland ESAT-PSI, University of Leuven, Belgium {ferrari,vangool}@vision.ee.ethz.h,
Wide-baseline Multiple-view Correspondenes Vittorio Ferrari, Tinne Tuytelaars, Lu Van Gool, Computer Vision Group (BIWI), ETH Zuerih, Switzerland ESAT-PSI, University of Leuven, Belgium {ferrari,vangool}@vision.ee.ethz.h,
Accommodations of QoS DiffServ Over IP and MPLS Networks
 Aommodations of QoS DiffServ Over IP and MPLS Networks Abdullah AlWehaibi, Anjali Agarwal, Mihael Kadoh and Ahmed ElHakeem Department of Eletrial and Computer Department de Genie Eletrique Engineering
Aommodations of QoS DiffServ Over IP and MPLS Networks Abdullah AlWehaibi, Anjali Agarwal, Mihael Kadoh and Ahmed ElHakeem Department of Eletrial and Computer Department de Genie Eletrique Engineering
Dr.Hazeem Al-Khafaji Dept. of Computer Science, Thi-Qar University, College of Science, Iraq
 Volume 4 Issue 6 June 014 ISSN: 77 18X International Journal of Advaned Researh in Computer Siene and Software Engineering Researh Paper Available online at: www.ijarsse.om Medial Image Compression using
Volume 4 Issue 6 June 014 ISSN: 77 18X International Journal of Advaned Researh in Computer Siene and Software Engineering Researh Paper Available online at: www.ijarsse.om Medial Image Compression using
OFF-LINE ROBOT VISION SYSTEM PROGRAMMING USING A COMPUTER AIDED DESIGN SYSTEM S. SRIDARAN. Thesis submitted to the Faculty of the
 OFF-LINE ROBOT VISION SYSTEM PROGRAMMING USING A COMPUTER AIDED DESIGN SYSTEM by S. SRIDARAN Thesis submitted to the Faulty of the Virginia Polytehni Institute and State University in partial fulfillment
OFF-LINE ROBOT VISION SYSTEM PROGRAMMING USING A COMPUTER AIDED DESIGN SYSTEM by S. SRIDARAN Thesis submitted to the Faulty of the Virginia Polytehni Institute and State University in partial fulfillment
Chapter 2: Introduction to Maple V
 Chapter 2: Introdution to Maple V 2-1 Working with Maple Worksheets Try It! (p. 15) Start a Maple session with an empty worksheet. The name of the worksheet should be Untitled (1). Use one of the standard
Chapter 2: Introdution to Maple V 2-1 Working with Maple Worksheets Try It! (p. 15) Start a Maple session with an empty worksheet. The name of the worksheet should be Untitled (1). Use one of the standard
TUMOR DETECTION IN MRI BRAIN IMAGE SEGMENTATION USING PHASE CONGRUENCY MODIFIED FUZZY C MEAN ALGORITHM
 TUMOR DETECTION IN MRI BRAIN IMAGE SEGMENTATION USING PHASE CONGRUENCY MODIFIED FUZZY C MEAN ALGORITHM M. Murugeswari 1, M.Gayathri 2 1 Assoiate Professor, 2 PG Sholar 1,2 K.L.N College of Information
TUMOR DETECTION IN MRI BRAIN IMAGE SEGMENTATION USING PHASE CONGRUENCY MODIFIED FUZZY C MEAN ALGORITHM M. Murugeswari 1, M.Gayathri 2 1 Assoiate Professor, 2 PG Sholar 1,2 K.L.N College of Information