3D Convolutional Neural Networks for Landing Zone Detection from LiDAR
|
|
|
- Oswin Briggs
- 6 years ago
- Views:
Transcription
1 3D Convolutional Neural Networks for Landing Zone Detection from LiDAR Daniel Mataruna and Sebastian Scherer Presented by: Sabin Kafle
2 Outline Introduction Preliminaries Approach Volumetric Density Mapping Volumetric Convolutional Neural Nets Experiments Datasets Results
3 Introduction A system to detect a Landing Zone for autonomous helicopters is developed using 3D convolutional neural network and processed LiDAR point cloud as input. The system outperforms various benchmarks for small and potentially obscured obstacles detection in vegetated terrain.
4 System
5 Key challenges Engineering a system capable of reliably detecting landing safe site is difficult Appearance of vegetations, obstacles is heterogeneous and difficult to capture with hand build rules Noisiness and sparsity of point cloud data Machine learning system also has issues Maintenance of relevant information from large stream of data Obtaining Labelled data (is an expensive and laborious process)
6 Solutions offered Use 3D CNN with volumetric occupancy map which can perform real time safety evaluation once trained Use semi-synthetic point clouds to generate labelled data
7 Preliminaries LiDAR Convolutional Neural Network

8 LiDAR A remote sensing technology Measures distance by illuminating a target with laser and analyzing the reflected light Popular used technology to make highresolution maps A narrow laser-beam can map physical features with high resolutions; An aircraft can map terrain at 30cm resolution or better.

9 Fully-connected Neural Network (NN)

10 Convolutional Neural Networks

11 CNNs
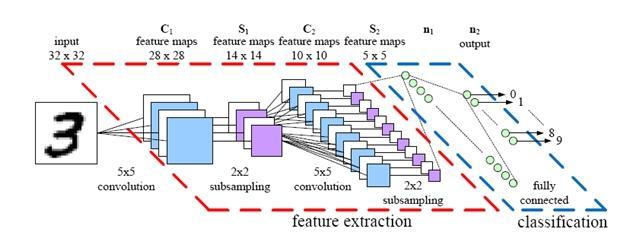
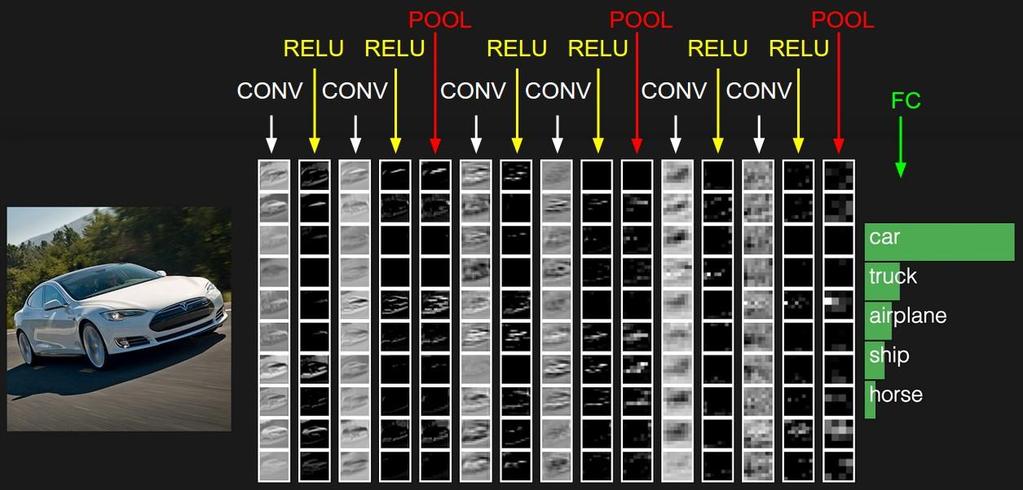
12 Example Architecture INPUT [32x32x3] will hold the raw pixel values of the image CONV layer will compute the output of neurons that are connected to local regions in the input RELU layer will apply an elementwise activation function, such as the max (0,x)max(0,x) thresholding at zero. POOL layer will perform a downsampling operation along the spatial dimensions FC (i.e. fully-connected) layer will compute the class scores
13 Example

14 A single layer example An example input volume in red (e.g. a 32x32x3 image), and an example volume of neurons in the first Convolutional layer. Each neuron in the convolutional layer is connected only to a local region in the input volume spatially.
15 Examples A CNN Weight Update Weight Update A CNN demo on MNIST data MNIST
16 Approach Volumetric Density Mapping Volumetric CNNs
17 Volumetric Density Mapping The volumetric map covers a horizontal area of 100m 2 to 200m 2 and a height of 2 to 4m. CNN is used to independently predict the safety of 1m 3 subvolume within this map Space containing vegetation is porous Probabilistic formulation of this idea is used For a given grid cell coordinate (i,j,k), T sequence of point data that either hit (z = 1) or pass through the grid cell (z = 0) is used A voxel size of 0.05m 3 is used For each cell state, Beta Process is used with parameters (alpha and beta) initialized to 1 and updated as Alpha = Alpha + z Beta = Beta + (1 - z) Posterior mean is calculated based on (Alpha) / (Alpha + Beta)
18 Volumetric Density Mapping (contd..) Non-overlapping tiles of 1m 2 along XY-plane are generated Ground surface height for each tile is obtained using minima calculation of height of all occupied cells within Then 1m 3 volume is placed on each tile with center along ground surface height. Each grid has resolution of 0.05m 3, so each subvolume has dimension of 20 x 20 x 20. TO SUMMARIZE Mean calculated using Beta variable parameters are considered as pixel intensity of each individual sub-volume A pixel for this mapping is of volume 0.05m 3 The dimension of resulting CNN will have input of size 20 x 20 x 20.

19 Volumetric Convolutional Neural Network
20 Model Parameters Hyperparameters Number of convolutional layers Number of feature maps Dimension of features (dimension of local connectivity) Pooling Dimension Parameters Weight and Bias of each neurons (including convoluted and fully-connected) Theano Library is used for computing gradients and Training
21 Experiments Datasets Results
22 Datasets Synthetic Datasets Scanning pattern of LiDAR sensor is simulated by its pulse repetition rate, angular resolution and sensor mount behavior Gaussian Noise is added to range (based on manufacturer's specification) Scenes were scanned until point density of 3000 points/m 2 was reached First Synthetic Dataset Ground surface is a mesh with height perturbed using noise Grass blades are simulated using three triangle strip Grass placement is generated using Poisson process Box obstacles are placed Second Synthetic Dataset Box obstacles are replaced with 3D model selection 11 models of rock are used along with a tire and cinder blocks For each dataset, various parameters are swept, with 20 (first) instances and 40 (second) per parameter setting For each case, only half have an obstacle. Finally, generated data are augmented after being perturbed (to learn invariant classifier)
23 Datasets (contd..) Semi-synthetic Data Consists of real point cloud data for vegetation and ground combined with simulated data for obstacles Can be achieved simply by inserting virtual obstacles into the world frame and altering rays if they interfere Noise are added into rays in case of interference
24 Results Evaluation Metric Baselines Receiver Operating Characteristic (ROC) curves are used to compare different algorithms Random Forest Classifier Residuals of a robust plane fit Feature Bag of Words (BoW) [until recently considered state of art] Experiments The first synthetic data set is reserved to chose hyper-parameters for CNN. Two CNNs were chosen for final comparison C7-F64-P4-D512 C7-F32-P2-C5-F64-P2-D512
25 Results
26 Results
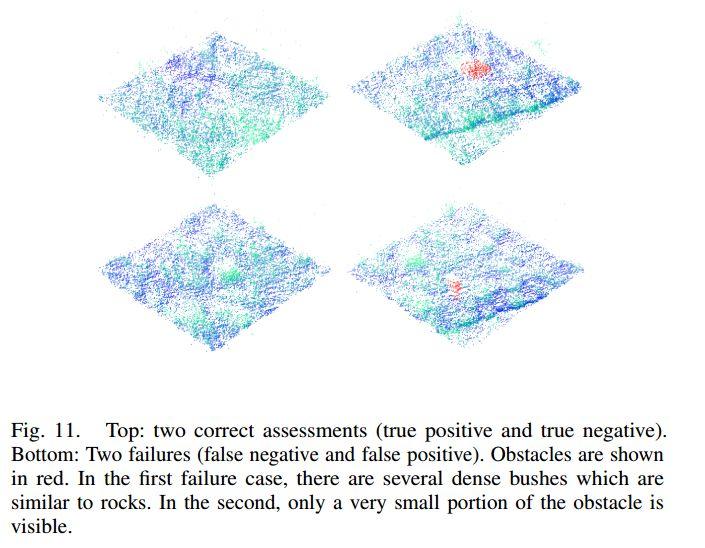
27 Misclassification
28 Future works Extend model to include more information including intensity, other source data etc. More extensive evaluations Current model might be overfitting to surface with grass
29 Questions? THANK YOU
30 References Stanford Neural network class Voxnet
Deep Learning with Tensorflow AlexNet
 Machine Learning and Computer Vision Group Deep Learning with Tensorflow http://cvml.ist.ac.at/courses/dlwt_w17/ AlexNet Krizhevsky, Alex, Ilya Sutskever, and Geoffrey E. Hinton, "Imagenet classification
Machine Learning and Computer Vision Group Deep Learning with Tensorflow http://cvml.ist.ac.at/courses/dlwt_w17/ AlexNet Krizhevsky, Alex, Ilya Sutskever, and Geoffrey E. Hinton, "Imagenet classification
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Know your data - many types of networks
 Architectures Know your data - many types of networks Fixed length representation Variable length representation Online video sequences, or samples of different sizes Images Specific architectures for
Architectures Know your data - many types of networks Fixed length representation Variable length representation Online video sequences, or samples of different sizes Images Specific architectures for
LiDAR Data Processing:
 LiDAR Data Processing: Concepts and Methods for LEFI Production Gordon W. Frazer GWF LiDAR Analytics Outline of Presentation Data pre-processing Data quality checking and options for repair Data post-processing
LiDAR Data Processing: Concepts and Methods for LEFI Production Gordon W. Frazer GWF LiDAR Analytics Outline of Presentation Data pre-processing Data quality checking and options for repair Data post-processing
Deep Learning for Robust Normal Estimation in Unstructured Point Clouds. Alexandre Boulch. Renaud Marlet
 Deep Learning for Robust Normal Estimation in Unstructured Point Clouds Alexandre Boulch Renaud Marlet Normal estimation in point clouds Normal: 3D normalized vector At each point: local orientation of
Deep Learning for Robust Normal Estimation in Unstructured Point Clouds Alexandre Boulch Renaud Marlet Normal estimation in point clouds Normal: 3D normalized vector At each point: local orientation of
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas
 PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping
 Lecture#05 (Wednesday, September 12) Mapping") Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping Lecturer: Alex Styler (in for Drew Bagnell) Scribe: Victor Hwang 1 1 Occupancy Mapping When solving the localization
Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping Lecturer: Alex Styler (in for Drew Bagnell) Scribe: Victor Hwang 1 1 Occupancy Mapping When solving the localization
POINT CLOUD DEEP LEARNING
 POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
Large-Scale Point Cloud Classification Benchmark
 Large-Scale Point Cloud Classification Benchmark www.semantic3d.net IGP & CVG, ETH Zürich www.semantic3d.net, info@semantic3d.net 7/6/2016 1 Timo Hackel Nikolay Savinov Ľubor Ladický Jan Dirk Wegner Konrad
Large-Scale Point Cloud Classification Benchmark www.semantic3d.net IGP & CVG, ETH Zürich www.semantic3d.net, info@semantic3d.net 7/6/2016 1 Timo Hackel Nikolay Savinov Ľubor Ladický Jan Dirk Wegner Konrad
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
ECE 5470 Classification, Machine Learning, and Neural Network Review
 ECE 5470 Classification, Machine Learning, and Neural Network Review Due December 1. Solution set Instructions: These questions are to be answered on this document which should be submitted to blackboard
ECE 5470 Classification, Machine Learning, and Neural Network Review Due December 1. Solution set Instructions: These questions are to be answered on this document which should be submitted to blackboard
Airborne Laser Scanning: Remote Sensing with LiDAR
 Airborne Laser Scanning: Remote Sensing with LiDAR ALS / LIDAR OUTLINE Laser remote sensing background Basic components of an ALS/LIDAR system Two distinct families of ALS systems Waveform Discrete Return
Airborne Laser Scanning: Remote Sensing with LiDAR ALS / LIDAR OUTLINE Laser remote sensing background Basic components of an ALS/LIDAR system Two distinct families of ALS systems Waveform Discrete Return
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps
 Lecture#06(Thursday September 11) Occupancy Maps") Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
Using Machine Learning for Classification of Cancer Cells
 Using Machine Learning for Classification of Cancer Cells Camille Biscarrat University of California, Berkeley I Introduction Cell screening is a commonly used technique in the development of new drugs.
Using Machine Learning for Classification of Cancer Cells Camille Biscarrat University of California, Berkeley I Introduction Cell screening is a commonly used technique in the development of new drugs.
Generate Digital Elevation Models Using Laser Altimetry (LIDAR) Data
 Data") Generate Digital Elevation Models Using Laser Altimetry (LIDAR) Data Literature Survey Christopher Weed October 2000 Abstract Laser altimetry (LIDAR) data must be processed to generate a digital elevation
Generate Digital Elevation Models Using Laser Altimetry (LIDAR) Data Literature Survey Christopher Weed October 2000 Abstract Laser altimetry (LIDAR) data must be processed to generate a digital elevation
Deconvolution Networks
 Deconvolution Networks Johan Brynolfsson Mathematical Statistics Centre for Mathematical Sciences Lund University December 6th 2016 1 / 27 Deconvolution Neural Networks 2 / 27 Image Deconvolution True
Deconvolution Networks Johan Brynolfsson Mathematical Statistics Centre for Mathematical Sciences Lund University December 6th 2016 1 / 27 Deconvolution Neural Networks 2 / 27 Image Deconvolution True
Improving 3-D 3 D processing: an efficient data structure and scale selection. Jean-François Lalonde Vision and Mobile Robotics Laboratory
 Improving 3-D 3 D processing: an efficient data structure and scale selection Jean-François Lalonde Vision and Mobile Robotics Laboratory Goal Improve 3-D signal processing techniques Speed of execution
Improving 3-D 3 D processing: an efficient data structure and scale selection Jean-François Lalonde Vision and Mobile Robotics Laboratory Goal Improve 3-D signal processing techniques Speed of execution
3D Object Classification via Spherical Projections
 3D Object Classification via Spherical Projections Zhangjie Cao 1,QixingHuang 2,andRamaniKarthik 3 1 School of Software Tsinghua University, China 2 Department of Computer Science University of Texas at
3D Object Classification via Spherical Projections Zhangjie Cao 1,QixingHuang 2,andRamaniKarthik 3 1 School of Software Tsinghua University, China 2 Department of Computer Science University of Texas at
Dynamic Routing Between Capsules
 Report Explainable Machine Learning Dynamic Routing Between Capsules Author: Michael Dorkenwald Supervisor: Dr. Ullrich Köthe 28. Juni 2018 Inhaltsverzeichnis 1 Introduction 2 2 Motivation 2 3 CapusleNet
Report Explainable Machine Learning Dynamic Routing Between Capsules Author: Michael Dorkenwald Supervisor: Dr. Ullrich Köthe 28. Juni 2018 Inhaltsverzeichnis 1 Introduction 2 2 Motivation 2 3 CapusleNet
Deep Learning for Computer Vision II
 IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
An Introduction to Lidar & Forestry May 2013
 An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Machine Learning. Deep Learning. Eric Xing (and Pengtao Xie) , Fall Lecture 8, October 6, Eric CMU,
 , Fall Lecture 8, October 6, Eric CMU,") Machine Learning 10-701, Fall 2015 Deep Learning Eric Xing (and Pengtao Xie) Lecture 8, October 6, 2015 Eric Xing @ CMU, 2015 1 A perennial challenge in computer vision: feature engineering SIFT Spin image
Machine Learning 10-701, Fall 2015 Deep Learning Eric Xing (and Pengtao Xie) Lecture 8, October 6, 2015 Eric Xing @ CMU, 2015 1 A perennial challenge in computer vision: feature engineering SIFT Spin image
Keras: Handwritten Digit Recognition using MNIST Dataset
 Keras: Handwritten Digit Recognition using MNIST Dataset IIT PATNA February 9, 2017 1 / 24 OUTLINE 1 Introduction Keras: Deep Learning library for Theano and TensorFlow 2 Installing Keras Installation
Keras: Handwritten Digit Recognition using MNIST Dataset IIT PATNA February 9, 2017 1 / 24 OUTLINE 1 Introduction Keras: Deep Learning library for Theano and TensorFlow 2 Installing Keras Installation
NATIONWIDE POINT CLOUDS AND 3D GEO- INFORMATION: CREATION AND MAINTENANCE GEORGE VOSSELMAN
 NATIONWIDE POINT CLOUDS AND 3D GEO- INFORMATION: CREATION AND MAINTENANCE GEORGE VOSSELMAN OVERVIEW National point clouds Airborne laser scanning in the Netherlands Quality control Developments in lidar
NATIONWIDE POINT CLOUDS AND 3D GEO- INFORMATION: CREATION AND MAINTENANCE GEORGE VOSSELMAN OVERVIEW National point clouds Airborne laser scanning in the Netherlands Quality control Developments in lidar
Perceptron: This is convolution!
 Perceptron: This is convolution! v v v Shared weights v Filter = local perceptron. Also called kernel. By pooling responses at different locations, we gain robustness to the exact spatial location of image
Perceptron: This is convolution! v v v Shared weights v Filter = local perceptron. Also called kernel. By pooling responses at different locations, we gain robustness to the exact spatial location of image
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
2 OVERVIEW OF RELATED WORK
 Utsushi SAKAI Jun OGATA This paper presents a pedestrian detection system based on the fusion of sensors for LIDAR and convolutional neural network based image classification. By using LIDAR our method
Utsushi SAKAI Jun OGATA This paper presents a pedestrian detection system based on the fusion of sensors for LIDAR and convolutional neural network based image classification. By using LIDAR our method
Index. Springer Nature Switzerland AG 2019 B. Moons et al., Embedded Deep Learning,
 Index A Algorithmic noise tolerance (ANT), 93 94 Application specific instruction set processors (ASIPs), 115 116 Approximate computing application level, 95 circuits-levels, 93 94 DAS and DVAS, 107 110
Index A Algorithmic noise tolerance (ANT), 93 94 Application specific instruction set processors (ASIPs), 115 116 Approximate computing application level, 95 circuits-levels, 93 94 DAS and DVAS, 107 110
Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration. JAMIE YOUNG Senior Manager LiDAR Solutions
 Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration JAMIE YOUNG Senior Manager LiDAR Solutions Topics Terrestrial GPS reference Planning and Collection Considerations
Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration JAMIE YOUNG Senior Manager LiDAR Solutions Topics Terrestrial GPS reference Planning and Collection Considerations
Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology. Maziana Muhamad
 Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology Maziana Muhamad Summarising LiDAR (Airborne Laser Scanning) LiDAR is a reliable survey technique, capable of: acquiring
Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology Maziana Muhamad Summarising LiDAR (Airborne Laser Scanning) LiDAR is a reliable survey technique, capable of: acquiring
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map
 Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Deep Learning in Visual Recognition. Thanks Da Zhang for the slides
 Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
Lecture 37: ConvNets (Cont d) and Training
 and Training") Lecture 37: ConvNets (Cont d) and Training CS 4670/5670 Sean Bell [http://bbabenko.tumblr.com/post/83319141207/convolutional-learnings-things-i-learned-by] (Unrelated) Dog vs Food [Karen Zack, @teenybiscuit]
Lecture 37: ConvNets (Cont d) and Training CS 4670/5670 Sean Bell [http://bbabenko.tumblr.com/post/83319141207/convolutional-learnings-things-i-learned-by] (Unrelated) Dog vs Food [Karen Zack, @teenybiscuit]
LIDAR and Terrain Models: In 3D!
 LIDAR and Terrain Models: In 3D! Stuart.green@teagasc.ie http://www.esri.com/library/whitepapers/pdfs/lidar-analysis-forestry.pdf http://www.csc.noaa.gov/digitalcoast/_/pdf/refinement_of_topographic_lidar_to_create_a_bare_e
LIDAR and Terrain Models: In 3D! Stuart.green@teagasc.ie http://www.esri.com/library/whitepapers/pdfs/lidar-analysis-forestry.pdf http://www.csc.noaa.gov/digitalcoast/_/pdf/refinement_of_topographic_lidar_to_create_a_bare_e
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space
 PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space Sikai Zhong February 14, 2018 COMPUTER SCIENCE Table of contents 1. PointNet 2. PointNet++ 3. Experiments 1 PointNet Property
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space Sikai Zhong February 14, 2018 COMPUTER SCIENCE Table of contents 1. PointNet 2. PointNet++ 3. Experiments 1 PointNet Property
COMP9444 Neural Networks and Deep Learning 7. Image Processing. COMP9444 c Alan Blair, 2017
 COMP9444 Neural Networks and Deep Learning 7. Image Processing COMP9444 17s2 Image Processing 1 Outline Image Datasets and Tasks Convolution in Detail AlexNet Weight Initialization Batch Normalization
COMP9444 Neural Networks and Deep Learning 7. Image Processing COMP9444 17s2 Image Processing 1 Outline Image Datasets and Tasks Convolution in Detail AlexNet Weight Initialization Batch Normalization
Intro to Deep Learning. Slides Credit: Andrej Karapathy, Derek Hoiem, Marc Aurelio, Yann LeCunn
 Intro to Deep Learning Slides Credit: Andrej Karapathy, Derek Hoiem, Marc Aurelio, Yann LeCunn Why this class? Deep Features Have been able to harness the big data in the most efficient and effective
Intro to Deep Learning Slides Credit: Andrej Karapathy, Derek Hoiem, Marc Aurelio, Yann LeCunn Why this class? Deep Features Have been able to harness the big data in the most efficient and effective
LIDAR MAPPING FACT SHEET
 1. LIDAR THEORY What is lidar? Lidar is an acronym for light detection and ranging. In the mapping industry, this term is used to describe an airborne laser profiling system that produces location and
1. LIDAR THEORY What is lidar? Lidar is an acronym for light detection and ranging. In the mapping industry, this term is used to describe an airborne laser profiling system that produces location and
Deep Learning. Visualizing and Understanding Convolutional Networks. Christopher Funk. Pennsylvania State University.
 Visualizing and Understanding Convolutional Networks Christopher Pennsylvania State University February 23, 2015 Some Slide Information taken from Pierre Sermanet (Google) presentation on and Computer
Visualizing and Understanding Convolutional Networks Christopher Pennsylvania State University February 23, 2015 Some Slide Information taken from Pierre Sermanet (Google) presentation on and Computer
Object Recognition II
 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
CMU Lecture 18: Deep learning and Vision: Convolutional neural networks. Teacher: Gianni A. Di Caro
 CMU 15-781 Lecture 18: Deep learning and Vision: Convolutional neural networks Teacher: Gianni A. Di Caro DEEP, SHALLOW, CONNECTED, SPARSE? Fully connected multi-layer feed-forward perceptrons: More powerful
CMU 15-781 Lecture 18: Deep learning and Vision: Convolutional neural networks Teacher: Gianni A. Di Caro DEEP, SHALLOW, CONNECTED, SPARSE? Fully connected multi-layer feed-forward perceptrons: More powerful
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data
 ELMF 2013, 11-13 November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at
ELMF 2013, 11-13 November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at
Supplementary A. Overview. C. Time and Space Complexity. B. Shape Retrieval. D. Permutation Invariant SOM. B.1. Dataset
 Supplementary A. Overview This supplementary document provides more technical details and experimental results to the main paper. Shape retrieval experiments are demonstrated with ShapeNet Core55 dataset
Supplementary A. Overview This supplementary document provides more technical details and experimental results to the main paper. Shape retrieval experiments are demonstrated with ShapeNet Core55 dataset
2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE
 Co-Host Host 2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE Presentation Outline review modern survey methodologies available to support railway requirements measuring everything
Co-Host Host 2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE Presentation Outline review modern survey methodologies available to support railway requirements measuring everything
Fuzzy Set Theory in Computer Vision: Example 3, Part II
 Fuzzy Set Theory in Computer Vision: Example 3, Part II Derek T. Anderson and James M. Keller FUZZ-IEEE, July 2017 Overview Resource; CS231n: Convolutional Neural Networks for Visual Recognition https://github.com/tuanavu/stanford-
Fuzzy Set Theory in Computer Vision: Example 3, Part II Derek T. Anderson and James M. Keller FUZZ-IEEE, July 2017 Overview Resource; CS231n: Convolutional Neural Networks for Visual Recognition https://github.com/tuanavu/stanford-
CS 2750: Machine Learning. Neural Networks. Prof. Adriana Kovashka University of Pittsburgh April 13, 2016
 CS 2750: Machine Learning Neural Networks Prof. Adriana Kovashka University of Pittsburgh April 13, 2016 Plan for today Neural network definition and examples Training neural networks (backprop) Convolutional
CS 2750: Machine Learning Neural Networks Prof. Adriana Kovashka University of Pittsburgh April 13, 2016 Plan for today Neural network definition and examples Training neural networks (backprop) Convolutional
Advanced Machine Learning
 Advanced Machine Learning Convolutional Neural Networks for Handwritten Digit Recognition Andreas Georgopoulos CID: 01281486 Abstract Abstract At this project three different Convolutional Neural Netwroks
Advanced Machine Learning Convolutional Neural Networks for Handwritten Digit Recognition Andreas Georgopoulos CID: 01281486 Abstract Abstract At this project three different Convolutional Neural Netwroks
Introduction to Mobile Robotics Techniques for 3D Mapping
 Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Recurrent Convolutional Neural Networks for Scene Labeling
 Recurrent Convolutional Neural Networks for Scene Labeling Pedro O. Pinheiro, Ronan Collobert Reviewed by Yizhe Zhang August 14, 2015 Scene labeling task Scene labeling: assign a class label to each pixel
Recurrent Convolutional Neural Networks for Scene Labeling Pedro O. Pinheiro, Ronan Collobert Reviewed by Yizhe Zhang August 14, 2015 Scene labeling task Scene labeling: assign a class label to each pixel
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Keras: Handwritten Digit Recognition using MNIST Dataset
 Keras: Handwritten Digit Recognition using MNIST Dataset IIT PATNA January 31, 2018 1 / 30 OUTLINE 1 Keras: Introduction 2 Installing Keras 3 Keras: Building, Testing, Improving A Simple Network 2 / 30
Keras: Handwritten Digit Recognition using MNIST Dataset IIT PATNA January 31, 2018 1 / 30 OUTLINE 1 Keras: Introduction 2 Installing Keras 3 Keras: Building, Testing, Improving A Simple Network 2 / 30
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
Accelerating Convolutional Neural Nets. Yunming Zhang
 Accelerating Convolutional Neural Nets Yunming Zhang Focus Convolutional Neural Nets is the state of the art in classifying the images The models take days to train Difficult for the programmers to tune
Accelerating Convolutional Neural Nets Yunming Zhang Focus Convolutional Neural Nets is the state of the art in classifying the images The models take days to train Difficult for the programmers to tune
INTRODUCTION TO DEEP LEARNING
 INTRODUCTION TO DEEP LEARNING CONTENTS Introduction to deep learning Contents 1. Examples 2. Machine learning 3. Neural networks 4. Deep learning 5. Convolutional neural networks 6. Conclusion 7. Additional
INTRODUCTION TO DEEP LEARNING CONTENTS Introduction to deep learning Contents 1. Examples 2. Machine learning 3. Neural networks 4. Deep learning 5. Convolutional neural networks 6. Conclusion 7. Additional
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
2. POINT CLOUD DATA PROCESSING
 Point Cloud Generation from suas-mounted iphone Imagery: Performance Analysis A. D. Ladai, J. Miller Towill, Inc., 2300 Clayton Road, Suite 1200, Concord, CA 94520-2176, USA - (andras.ladai, jeffrey.miller)@towill.com
Point Cloud Generation from suas-mounted iphone Imagery: Performance Analysis A. D. Ladai, J. Miller Towill, Inc., 2300 Clayton Road, Suite 1200, Concord, CA 94520-2176, USA - (andras.ladai, jeffrey.miller)@towill.com
FOR 274: Surfaces from Lidar. Lidar DEMs: Understanding the Returns. Lidar DEMs: Understanding the Returns
 FOR 274: Surfaces from Lidar LiDAR for DEMs The Main Principal Common Methods Limitations Readings: See Website Lidar DEMs: Understanding the Returns The laser pulse travel can travel through trees before
FOR 274: Surfaces from Lidar LiDAR for DEMs The Main Principal Common Methods Limitations Readings: See Website Lidar DEMs: Understanding the Returns The laser pulse travel can travel through trees before
Automatic DTM Extraction from Dense Raw LIDAR Data in Urban Areas
 Automatic DTM Extraction from Dense Raw LIDAR Data in Urban Areas Nizar ABO AKEL, Ofer ZILBERSTEIN and Yerach DOYTSHER, Israel Key words: LIDAR, DSM, urban areas, DTM extraction. SUMMARY Although LIDAR
Automatic DTM Extraction from Dense Raw LIDAR Data in Urban Areas Nizar ABO AKEL, Ofer ZILBERSTEIN and Yerach DOYTSHER, Israel Key words: LIDAR, DSM, urban areas, DTM extraction. SUMMARY Although LIDAR
Pedestrian Detection and Tracking in Images and Videos
 Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
Practical Methodology. Lecture slides for Chapter 11 of Deep Learning Ian Goodfellow
 Practical Methodology Lecture slides for Chapter 11 of Deep Learning www.deeplearningbook.org Ian Goodfellow 2016-09-26 What drives success in ML? Arcane knowledge of dozens of obscure algorithms? Mountains
Practical Methodology Lecture slides for Chapter 11 of Deep Learning www.deeplearningbook.org Ian Goodfellow 2016-09-26 What drives success in ML? Arcane knowledge of dozens of obscure algorithms? Mountains
Overview. 1. Aerial LiDAR in Wisconsin (20 minutes) 2. Demonstration of data in CAD (30 minutes) 3. High Density LiDAR (20 minutes)
 2. Demonstration of data in CAD (30 minutes) 3. High Density LiDAR (20 minutes)") Overview 1. Aerial LiDAR in Wisconsin (20 minutes) 2. Demonstration of data in CAD (30 minutes) 3. High Density LiDAR (20 minutes) 4. Aerial lidar technology advancements (15 minutes) 5. Q & A 1. Aerial
Overview 1. Aerial LiDAR in Wisconsin (20 minutes) 2. Demonstration of data in CAD (30 minutes) 3. High Density LiDAR (20 minutes) 4. Aerial lidar technology advancements (15 minutes) 5. Q & A 1. Aerial
Algorithms for GIS csci3225
 Algorithms for GIS csci3225 Laura Toma Bowdoin College LiDAR data in GIS LiDAR (Light Detection and Ranging) Each point records: its geographic location x,y its height z the number of returns in its pulse
Algorithms for GIS csci3225 Laura Toma Bowdoin College LiDAR data in GIS LiDAR (Light Detection and Ranging) Each point records: its geographic location x,y its height z the number of returns in its pulse
MULTI-LEVEL 3D CONVOLUTIONAL NEURAL NETWORK FOR OBJECT RECOGNITION SAMBIT GHADAI XIAN LEE ADITYA BALU SOUMIK SARKAR ADARSH KRISHNAMURTHY
 MULTI-LEVEL 3D CONVOLUTIONAL NEURAL NETWORK FOR OBJECT RECOGNITION SAMBIT GHADAI XIAN LEE ADITYA BALU SOUMIK SARKAR ADARSH KRISHNAMURTHY Outline Object Recognition Multi-Level Volumetric Representations
MULTI-LEVEL 3D CONVOLUTIONAL NEURAL NETWORK FOR OBJECT RECOGNITION SAMBIT GHADAI XIAN LEE ADITYA BALU SOUMIK SARKAR ADARSH KRISHNAMURTHY Outline Object Recognition Multi-Level Volumetric Representations
3D-CNN and SVM for Multi-Drug Resistance Detection
 3D-CNN and SVM for Multi-Drug Resistance Detection Imane Allaouzi, Badr Benamrou, Mohamed Benamrou and Mohamed Ben Ahmed Abdelmalek Essaâdi University Faculty of Sciences and Techniques, Tangier, Morocco
3D-CNN and SVM for Multi-Drug Resistance Detection Imane Allaouzi, Badr Benamrou, Mohamed Benamrou and Mohamed Ben Ahmed Abdelmalek Essaâdi University Faculty of Sciences and Techniques, Tangier, Morocco
Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots
 Lecture#05 (Monday, January 26) Lecturer: Byron Boots") Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots Mapping 1 Occupancy Mapping When solving the localization problem, we had a map of the world and tried
Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots Mapping 1 Occupancy Mapping When solving the localization problem, we had a map of the world and tried
SIMULATED LIDAR WAVEFORMS FOR THE ANALYSIS OF LIGHT PROPAGATION THROUGH A TREE CANOPY
 SIMULATED LIDAR WAVEFORMS FOR THE ANALYSIS OF LIGHT PROPAGATION THROUGH A TREE CANOPY Angela M. Kim and Richard C. Olsen Remote Sensing Center Naval Postgraduate School 1 University Circle Monterey, CA
SIMULATED LIDAR WAVEFORMS FOR THE ANALYSIS OF LIGHT PROPAGATION THROUGH A TREE CANOPY Angela M. Kim and Richard C. Olsen Remote Sensing Center Naval Postgraduate School 1 University Circle Monterey, CA
Deep Learning Cook Book
 Deep Learning Cook Book Robert Haschke (CITEC) Overview Input Representation Output Layer + Cost Function Hidden Layer Units Initialization Regularization Input representation Choose an input representation
Deep Learning Cook Book Robert Haschke (CITEC) Overview Input Representation Output Layer + Cost Function Hidden Layer Units Initialization Regularization Input representation Choose an input representation
Light Detection and Ranging (LiDAR)
") Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Cadastre - Preliminary Results
 Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Pankaj Kumar 1*, Alias Abdul Rahman 1 and Gurcan Buyuksalih 2 ¹Department of Geoinformation Universiti
Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Pankaj Kumar 1*, Alias Abdul Rahman 1 and Gurcan Buyuksalih 2 ¹Department of Geoinformation Universiti
Lidar Sensors, Today & Tomorrow. Christian Sevcik RIEGL Laser Measurement Systems
 Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
1. INTRODUCTION 2. OPAL LIDAR OVERVIEW
 Characterization of the OPAL LiDAR under controlled obscurant conditions Xiaoying Cao, Philip Church, Justin Matheson Neptec Technology Corporation, 302 Legget Drive, Kanata, Ontario, Canada K2K 1Y5 ABSTRACT
Characterization of the OPAL LiDAR under controlled obscurant conditions Xiaoying Cao, Philip Church, Justin Matheson Neptec Technology Corporation, 302 Legget Drive, Kanata, Ontario, Canada K2K 1Y5 ABSTRACT
HAWAII KAUAI Survey Report. LIDAR System Description and Specifications
 HAWAII KAUAI Survey Report LIDAR System Description and Specifications This survey used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) serial number 06SEN195 mounted in a twin-engine Navajo Piper
HAWAII KAUAI Survey Report LIDAR System Description and Specifications This survey used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) serial number 06SEN195 mounted in a twin-engine Navajo Piper
Hide-and-Seek: Forcing a network to be Meticulous for Weakly-supervised Object and Action Localization
 Hide-and-Seek: Forcing a network to be Meticulous for Weakly-supervised Object and Action Localization Krishna Kumar Singh and Yong Jae Lee University of California, Davis ---- Paper Presentation Yixian
Hide-and-Seek: Forcing a network to be Meticulous for Weakly-supervised Object and Action Localization Krishna Kumar Singh and Yong Jae Lee University of California, Davis ---- Paper Presentation Yixian
Spring Localization II. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring Localization II. Roland Siegwart, Margarita Chli, Juan Nieto, Nick Lawrance. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Deep Learning Explained Module 4: Convolution Neural Networks (CNN or Conv Nets)
") Deep Learning Explained Module 4: Convolution Neural Networks (CNN or Conv Nets) Sayan D. Pathak, Ph.D., Principal ML Scientist, Microsoft Roland Fernandez, Senior Researcher, Microsoft Module Outline
Deep Learning Explained Module 4: Convolution Neural Networks (CNN or Conv Nets) Sayan D. Pathak, Ph.D., Principal ML Scientist, Microsoft Roland Fernandez, Senior Researcher, Microsoft Module Outline
Machine Learning 13. week
 Machine Learning 13. week Deep Learning Convolutional Neural Network Recurrent Neural Network 1 Why Deep Learning is so Popular? 1. Increase in the amount of data Thanks to the Internet, huge amount of
Machine Learning 13. week Deep Learning Convolutional Neural Network Recurrent Neural Network 1 Why Deep Learning is so Popular? 1. Increase in the amount of data Thanks to the Internet, huge amount of
Lecture 10 Dense 3D Reconstruction
 Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Tutorial on Machine Learning Tools
 Tutorial on Machine Learning Tools Yanbing Xue Milos Hauskrecht Why do we need these tools? Widely deployed classical models No need to code from scratch Easy-to-use GUI Outline Matlab Apps Weka 3 UI TensorFlow
Tutorial on Machine Learning Tools Yanbing Xue Milos Hauskrecht Why do we need these tools? Widely deployed classical models No need to code from scratch Easy-to-use GUI Outline Matlab Apps Weka 3 UI TensorFlow
Lecture: Autonomous micro aerial vehicles
 Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
Computer Graphics Ray Casting. Matthias Teschner
 Computer Graphics Ray Casting Matthias Teschner Outline Context Implicit surfaces Parametric surfaces Combined objects Triangles Axis-aligned boxes Iso-surfaces in grids Summary University of Freiburg
Computer Graphics Ray Casting Matthias Teschner Outline Context Implicit surfaces Parametric surfaces Combined objects Triangles Axis-aligned boxes Iso-surfaces in grids Summary University of Freiburg
VEHICLE CLASSIFICATION And License Plate Recognition
 VEHICLE CLASSIFICATION And License Plate Recognition CS771A Course Project : Under Prof. Harish Karnick Amlan Kar Nishant Rai Sandipan Mandal Sourav Anand Group 26 Indian Institute of Technology Kanpur
VEHICLE CLASSIFICATION And License Plate Recognition CS771A Course Project : Under Prof. Harish Karnick Amlan Kar Nishant Rai Sandipan Mandal Sourav Anand Group 26 Indian Institute of Technology Kanpur
CS468: 3D Deep Learning on Point Cloud Data. class label part label. Hao Su. image. May 10, 2017
 CS468: 3D Deep Learning on Point Cloud Data class label part label Hao Su image. May 10, 2017 Agenda Point cloud generation Point cloud analysis CVPR 17, Point Set Generation Pipeline render CVPR 17, Point
CS468: 3D Deep Learning on Point Cloud Data class label part label Hao Su image. May 10, 2017 Agenda Point cloud generation Point cloud analysis CVPR 17, Point Set Generation Pipeline render CVPR 17, Point
Photo-realistic Renderings for Machines Seong-heum Kim
 Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Ryerson University CP8208. Soft Computing and Machine Intelligence. Naive Road-Detection using CNNS. Authors: Sarah Asiri - Domenic Curro
 Ryerson University CP8208 Soft Computing and Machine Intelligence Naive Road-Detection using CNNS Authors: Sarah Asiri - Domenic Curro April 24 2016 Contents 1 Abstract 2 2 Introduction 2 3 Motivation
Ryerson University CP8208 Soft Computing and Machine Intelligence Naive Road-Detection using CNNS Authors: Sarah Asiri - Domenic Curro April 24 2016 Contents 1 Abstract 2 2 Introduction 2 3 Motivation
Plankton Classification Using ConvNets
 Plankton Classification Using ConvNets Abhinav Rastogi Stanford University Stanford, CA arastogi@stanford.edu Haichuan Yu Stanford University Stanford, CA haichuan@stanford.edu Abstract We present the
Plankton Classification Using ConvNets Abhinav Rastogi Stanford University Stanford, CA arastogi@stanford.edu Haichuan Yu Stanford University Stanford, CA haichuan@stanford.edu Abstract We present the
Artificial Intelligence Introduction Handwriting Recognition Kadir Eren Unal ( ), Jakob Heyder ( )
, Jakob Heyder ( )") Structure: 1. Introduction 2. Problem 3. Neural network approach a. Architecture b. Phases of CNN c. Results 4. HTM approach a. Architecture b. Setup c. Results 5. Conclusion 1.) Introduction Artificial
Structure: 1. Introduction 2. Problem 3. Neural network approach a. Architecture b. Phases of CNN c. Results 4. HTM approach a. Architecture b. Setup c. Results 5. Conclusion 1.) Introduction Artificial
S7348: Deep Learning in Ford's Autonomous Vehicles. Bryan Goodman Argo AI 9 May 2017
 S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Dynamic Routing Between Capsules. Yiting Ethan Li, Haakon Hukkelaas, and Kaushik Ram Ramasamy
 Dynamic Routing Between Capsules Yiting Ethan Li, Haakon Hukkelaas, and Kaushik Ram Ramasamy Problems & Results Object classification in images without losing information about important parts of the picture.
Dynamic Routing Between Capsules Yiting Ethan Li, Haakon Hukkelaas, and Kaushik Ram Ramasamy Problems & Results Object classification in images without losing information about important parts of the picture.
Detection and Tracking of Moving Objects Using 2.5D Motion Grids
 Detection and Tracking of Moving Objects Using 2.5D Motion Grids Alireza Asvadi, Paulo Peixoto and Urbano Nunes Institute of Systems and Robotics, University of Coimbra September 2015 1 Outline: Introduction
Detection and Tracking of Moving Objects Using 2.5D Motion Grids Alireza Asvadi, Paulo Peixoto and Urbano Nunes Institute of Systems and Robotics, University of Coimbra September 2015 1 Outline: Introduction
Light Field Super Resolution with Convolutional Neural Networks
 Light Field Super Resolution with Convolutional Neural Networks by Andrew Hou A Thesis submitted in partial fulfillment of the requirements for Honors in the Department of Applied Mathematics and Computer
Light Field Super Resolution with Convolutional Neural Networks by Andrew Hou A Thesis submitted in partial fulfillment of the requirements for Honors in the Department of Applied Mathematics and Computer
Deep Learning For Video Classification. Presented by Natalie Carlebach & Gil Sharon
 Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in
Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in