Animating orientation. CS 448D: Character Animation Prof. Vladlen Koltun Stanford University
|
|
|
- Rodney Gibson
- 5 years ago
- Views:
Transcription
1 Animating orientation CS 448D: Character Animation Prof. Vladlen Koltun Stanford University
2 Orientation in the plane θ (cos θ, sin θ) ) R θ ( x y = sin θ ( cos θ sin θ )( x y ) cos θ
3 Refresher: Homogenous coordinates v = v x v y v z 1 T tx,t y,t z (v) = S sx,s y,s z (v) = t x t y t z s x s y s z v x v y v z 1 v x v y v z 1
4 Orientation in 3D R x α = cos(α) sin(α) 0 0 sin(α) cos(α) R y β = cos(β) 0 sin(β) sin(β) 0 cos(β) R z γ = cos(γ) sin(γ) 0 0 sin(γ) cos(γ)
5 Orientation in 3D Any orientation in 3D can be represented as a combination of three angles, specifying three consecutive rotations around axes. R α,β,γ = R z γr y β Rx α or? R α,β,γ = R x αr y β Rz γ or R α,β,γ = RαR z βr x γ z? These are fixed-angle or Euler angle representations. (Equivalent up to changing the order.)
 The Guerilla CG")
6 Interpolation and gimbal lock (c) The Guerilla CG Project
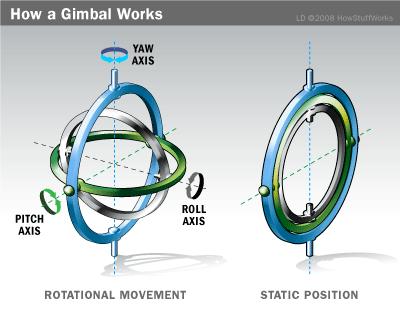

7 Gimbal
8 Interpolation and gimbal lock interactive demonstration
9 Euler s theorem (well, one of them) Any orientation can be specified by a rotation of angle θ about an axis n θ n
10 Quaternions An elegant representation of rotation in terms of axis and angle Interpolates smoothly Easy to compose
11 Quaternions Higher-dimensional complex numbers q = s + xi+yj+zk q =(s, x, y, z) q =(s, v) i 2 =j 2 =k 2 = ijk = 1 ij = k jk = i ki = j ji = -k kj = -i ik = -j
12 Quaternion arithmetic q + q = (s, v)+(s, v ) = ( s + xi+yj+zk ) + ( s + x i+y j+z k ) = (s + s )+(x + x )i + (y + y )j + (z + z )k = (s + s, v + v ) qq = (s, v)(s, v ) = ( s + xi+yj+zk )( s + x i+y j+z k ) = ss ( xx + yy + zz ) + s ( x i+y j+z k ) + s ( xi+yj+zk ) + (yz zy )i + (zx xz )j + (xy yx )k
13 Quaternion arithmetic q + q = (s, v)+(s, v ) = ( s + xi+yj+zk ) + ( s + x i+y j+z k ) = (s + s )+(x + x )i + (y + y )j + (z + z )k = (s + s, v + v ) qq = (s, v)(s, v ) = ( s + xi+yj+zk )( s + x i+y j+z k ) = ss ( xx + yy + zz ) + s ( x i+y j+z k ) + s ( xi+yj+zk ) +(yz zy )i + (zx xz )j + (xy yx )k = ( ss vv, v v + sv + s v )
14 Quaternion multiplicative inverse q 1 = (s, v) q 2 qq 1 = (s, v)(s, v) q 2 = s2 + v 2 q 2 =1
15 Representing rotation with quaternions θ v n ( q = cos θ 2, n sin θ 2 p = (0, v) R θ,n (v) =qpq 1 ) n =1 q 1 = ( cos θ 2, n sin θ 2 )
 + cos θ 2 ( v) = sin θ 2 cos θ 2 vn sin2 θ 2 n(n v) sin θ 2 cos θ 2 nv, = = = sin 2α = 2 sin α cos α cos 2α = cos 2 α sin 2 α cos 2α = 1 2 sin 2 α ) sin 2 θ 2 n (n v) + sin θ 2 cos θ 2")
16 Representing rotation with quaternions qpq 1 = ( cos θ 2, sin θ 2 n) (0, v) ( cos θ 2, sin θ 2 n) = ( cos θ 2, sin θ 2 n)( sin θ 2 vn, sin θ 2 (v n) + cos θ 2 v) = ( cos θ 2, sin θ 2 n)( sin θ 2 vn, sin θ 2 (n v) + cos θ 2 ( v) = sin θ 2 cos θ 2 vn sin2 θ 2 n(n v) sin θ 2 cos θ 2 nv, = = = sin 2α = 2 sin α cos α cos 2α = cos 2 α sin 2 α cos 2α = 1 2 sin 2 α ) sin 2 θ 2 n (n v) + sin θ 2 cos θ 2 (n v) + sin θ 2 cos θ 2 (n v) + cos2 θ 2 v + sin2 θ 2 n(vn) ( ) 0, sin 2 ) 2( θ n(nv) v(nn) + 2 sin θ 2 cos θ 2 (n v) + cos2 θ 2 v + sin2 θ 2 n(vn) ) (0, 2 sin 2 θ2 n(vn) + 2 sin θ2 cos θ2 (n v) + cos2 θ2 v sin2 θ2 v ( ) 0, (1 cos θ)n(vn) + sin θ(n v) + cos θv v u = u v v (u w) = u(vw) w(vu)
17 Representing rotation with quaternions u v θ v v α n Now what does rotation of v by about n actually do? θ R θ,n (v) = R θ,n (v )+R θ,n (v ) = v + (cos θ)v + (sin θ)u = n(vn) + (cos θ) ( v n(vn) ) + (sin θ)v n = (1 cos θ)n(vn) + (cos θ)v + (sin θ)v n = qpq 1 v n = v n sin α u u vn = v n cos α
18 Interpolating quaternions Quaternions that represent rotation as described so far lie on the unit sphere in the four-dimensional quaternion space. Any quaternion q represents rotation, the same as q/ q. We can linearly interpolate between two quaternions by treating them as generic four-dimensional vectors, but the interpolation would speed up in the middle.
19 Interpolating quaternions Instead we interpolate on the unit sphere. This results in smooth uniform motion.
20 Spherical Linear Interpolation (slerp) p = slerp(q 1,q 2,u) =? p q 1 q 2 uθ θ
 sin(uθ) sin(θ) sin((1 u)θ) sin(θ) q 1 + sin(uθ) sin(θ) q 2 q 1 + sin(uθ) sin(θ) q 2 q 2 r θ uθ p q 1 q 2 = cos(θ)q 1 + sin(θ)r r = q 2 cos(θ)q 1")
21 Spherical Linear Interpolation (slerp) p = slerp(q 1,q 2,u) = cos(uθ)q 1 + sin(uθ)r = cos(uθ)q 1 + sin(uθ) q 2 cos(θ)q 1 sin(θ) = = sin(θ) cos(uθ) cos(θ) sin(uθ) sin(θ) sin((1 u)θ) sin(θ) q 1 + sin(uθ) sin(θ) q 2 q 1 + sin(uθ) sin(θ) q 2 q 2 r θ uθ p q 1 q 2 = cos(θ)q 1 + sin(θ)r r = q 2 cos(θ)q 1 sin(θ)
22 Interpolating through the smaller angle angle q and -q represent the same rotation. q = ( cos θ 2, n sin ) θ 2 q = ( cos θ 2, n sin ) θ 2 = ( cos ( ( )) π + 2) θ, n sin π + θ 2 = ( ) cos 2π+θ 2, n sin 2π+θ 2 To interpolate from p to q through the smaller angle, compute the distances p-q and p+q and choose the smaller one.
23 Higher orders of continuity Bezier curves on the unit sphere of quaternions. See Shoemake, Animating Rotation with Quaternion Curves, SIGGRAPH 1985, for details.
24 Conversions Animators still specify orientation keys in Euler angles. Euler angles provide a visually intuitive and familiar interface. They are fine for specifying individual keys, just not interpolation. Interpolation is done in quaternions. We need to regularly convert between rotation matrices and quaternions.
25 Conversions: Quaternions to matrices q =(s, x, y, z) A = 1 2(y 2 + z 2 ) 2xy 2sz 2sy +2xz 0 2xy +2sz 1 2(x 2 + z 2 ) 2sx +2yz 0 2sy +2xz 2sx +2yz 1 2(x 2 + y 2 ) See Shoemake, Animating Rotation with Quaternion Curves, SIGGRAPH 1985, for details.
26 Conversions: Matrices to quaternions A = A 00 A 01 A 02 A 03 A 10 A 11 A 12 A 13 A 20 A 21 A 22 A 23 A 30 A 31 A 32 A 33 q =(s, x, y, z) s = ± 1 2 A00 + A 11 + A 22 + A 33 x = A 21 A 12 4s y = A 02 A 20 4s z = A 10 A 01 4s follows from previous slide by simple arithmetic, remembering that q =1.
Quaternion properties: addition. Introduction to quaternions. Quaternion properties: multiplication. Derivation of multiplication
 Introduction to quaternions Definition: A quaternion q consists of a scalar part s, s, and a vector part v ( xyz,,, v 3 : q where, [ s, v q [ s, ( xyz,, q s+ ix + jy + kz i 2 j 2 k 2 1 ij ji k k Quaternion
Introduction to quaternions Definition: A quaternion q consists of a scalar part s, s, and a vector part v ( xyz,,, v 3 : q where, [ s, v q [ s, ( xyz,, q s+ ix + jy + kz i 2 j 2 k 2 1 ij ji k k Quaternion
Transformations: 2D Transforms
 1. Translation Transformations: 2D Transforms Relocation of point WRT frame Given P = (x, y), translation T (dx, dy) Then P (x, y ) = T (dx, dy) P, where x = x + dx, y = y + dy Using matrix representation
1. Translation Transformations: 2D Transforms Relocation of point WRT frame Given P = (x, y), translation T (dx, dy) Then P (x, y ) = T (dx, dy) P, where x = x + dx, y = y + dy Using matrix representation
Animation Curves and Splines 2
 Animation Curves and Splines 2 Animation Homework Set up Thursday a simple avatar E.g. cube/sphere (or square/circle if 2D) Specify some key frames (positions/orientations) Associate Animation a time with
Animation Curves and Splines 2 Animation Homework Set up Thursday a simple avatar E.g. cube/sphere (or square/circle if 2D) Specify some key frames (positions/orientations) Associate Animation a time with
Quaternions and Rotations
 CSCI 520 Computer Animation and Simulation Quaternions and Rotations Jernej Barbic University of Southern California 1 Rotations Very important in computer animation and robotics Joint angles, rigid body
CSCI 520 Computer Animation and Simulation Quaternions and Rotations Jernej Barbic University of Southern California 1 Rotations Very important in computer animation and robotics Joint angles, rigid body
Transformations Week 9, Lecture 18
 CS 536 Computer Graphics Transformations Week 9, Lecture 18 2D Transformations David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 3 2D Affine Transformations
CS 536 Computer Graphics Transformations Week 9, Lecture 18 2D Transformations David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 3 2D Affine Transformations
CS 445 / 645 Introduction to Computer Graphics. Lecture 21 Representing Rotations
 CS 445 / 645 Introduction to Computer Graphics Lecture 21 Representing Rotations Parameterizing Rotations Straightforward in 2D A scalar, θ, represents rotation in plane More complicated in 3D Three scalars
CS 445 / 645 Introduction to Computer Graphics Lecture 21 Representing Rotations Parameterizing Rotations Straightforward in 2D A scalar, θ, represents rotation in plane More complicated in 3D Three scalars
Computer Animation II
 Computer Animation II Orientation interpolation Dynamics Some slides courtesy of Leonard McMillan and Jovan Popovic Lecture 13 6.837 Fall 2002 Interpolation Review from Thursday Splines Articulated bodies
Computer Animation II Orientation interpolation Dynamics Some slides courtesy of Leonard McMillan and Jovan Popovic Lecture 13 6.837 Fall 2002 Interpolation Review from Thursday Splines Articulated bodies
Animation and Quaternions
 Animation and Quaternions Partially based on slides by Justin Solomon: http://graphics.stanford.edu/courses/cs148-1-summer/assets/lecture_slides/lecture14_animation_techniques.pdf 1 Luxo Jr. Pixar 1986
Animation and Quaternions Partially based on slides by Justin Solomon: http://graphics.stanford.edu/courses/cs148-1-summer/assets/lecture_slides/lecture14_animation_techniques.pdf 1 Luxo Jr. Pixar 1986
Rotations in 3D Graphics and the Gimbal Lock
 Rotations in 3D Graphics and the Gimbal Lock Valentin Koch Autodesk Inc. January 27, 2016 Valentin Koch (ADSK) IEEE Okanagan January 27, 2016 1 / 37 Presentation Road Map 1 Introduction 2 Rotation Matrices
Rotations in 3D Graphics and the Gimbal Lock Valentin Koch Autodesk Inc. January 27, 2016 Valentin Koch (ADSK) IEEE Okanagan January 27, 2016 1 / 37 Presentation Road Map 1 Introduction 2 Rotation Matrices
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Fundamentals of Computer Animation
 Fundamentals of Computer Animation Orientation and Rotation University of Calgary GraphicsJungle Project CPSC 587 5 page Motivation Finding the most natural and compact way to present rotation and orientations
Fundamentals of Computer Animation Orientation and Rotation University of Calgary GraphicsJungle Project CPSC 587 5 page Motivation Finding the most natural and compact way to present rotation and orientations
CS612 - Algorithms in Bioinformatics
 Fall 2017 Structural Manipulation November 22, 2017 Rapid Structural Analysis Methods Emergence of large structural databases which do not allow manual (visual) analysis and require efficient 3-D search
Fall 2017 Structural Manipulation November 22, 2017 Rapid Structural Analysis Methods Emergence of large structural databases which do not allow manual (visual) analysis and require efficient 3-D search
Quaternions and Rotations
 CSCI 520 Computer Animation and Simulation Quaternions and Rotations Jernej Barbic University of Southern California 1 Rotations Very important in computer animation and robotics Joint angles, rigid body
CSCI 520 Computer Animation and Simulation Quaternions and Rotations Jernej Barbic University of Southern California 1 Rotations Very important in computer animation and robotics Joint angles, rigid body
Fundamentals of Computer Animation
 Fundamentals of Computer Animation Quaternions as Orientations () page 1 Multiplying Quaternions q1 = (w1, x1, y1, z1); q = (w, x, y, z); q1 * q = ( w1.w - v1.v, w1.v + w.v1 + v1 X v) where v1 = (x1, y1,
Fundamentals of Computer Animation Quaternions as Orientations () page 1 Multiplying Quaternions q1 = (w1, x1, y1, z1); q = (w, x, y, z); q1 * q = ( w1.w - v1.v, w1.v + w.v1 + v1 X v) where v1 = (x1, y1,
3D Transformations World Window to Viewport Transformation Week 2, Lecture 4
 CS 430/536 Computer Graphics I 3D Transformations World Window to Viewport Transformation Week 2, Lecture 4 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory
CS 430/536 Computer Graphics I 3D Transformations World Window to Viewport Transformation Week 2, Lecture 4 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory
Chapter 2 - Basic Mathematics for 3D Computer Graphics
 Chapter 2 - Basic Mathematics for 3D Computer Graphics Three-Dimensional Geometric Transformations Affine Transformations and Homogeneous Coordinates Combining Transformations Translation t + t Add a vector
Chapter 2 - Basic Mathematics for 3D Computer Graphics Three-Dimensional Geometric Transformations Affine Transformations and Homogeneous Coordinates Combining Transformations Translation t + t Add a vector
CS770/870 Spring 2017 Quaternions
 CS770/870 Spring 2017 Quaternions Primary resources used in preparing these notes: 1. van Osten, 3D Game Engine Programming: Understanding Quaternions, https://www.3dgep.com/understanding-quaternions 2.
CS770/870 Spring 2017 Quaternions Primary resources used in preparing these notes: 1. van Osten, 3D Game Engine Programming: Understanding Quaternions, https://www.3dgep.com/understanding-quaternions 2.
Animation. Keyframe animation. CS4620/5620: Lecture 30. Rigid motion: the simplest deformation. Controlling shape for animation
 Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
1 Transformations. Chapter 1. Transformations. Department of Computer Science and Engineering 1-1
 Transformations 1-1 Transformations are used within the entire viewing pipeline: Projection from world to view coordinate system View modifications: Panning Zooming Rotation 1-2 Transformations can also
Transformations 1-1 Transformations are used within the entire viewing pipeline: Projection from world to view coordinate system View modifications: Panning Zooming Rotation 1-2 Transformations can also
Quaternions & Rotation in 3D Space
 Quaternions & Rotation in 3D Space 1 Overview Quaternions: definition Quaternion properties Quaternions and rotation matrices Quaternion-rotation matrices relationship Spherical linear interpolation Concluding
Quaternions & Rotation in 3D Space 1 Overview Quaternions: definition Quaternion properties Quaternions and rotation matrices Quaternion-rotation matrices relationship Spherical linear interpolation Concluding
Jorg s Graphics Lecture Notes Coordinate Spaces 1
 Jorg s Graphics Lecture Notes Coordinate Spaces Coordinate Spaces Computer Graphics: Objects are rendered in the Euclidean Plane. However, the computational space is better viewed as one of Affine Space
Jorg s Graphics Lecture Notes Coordinate Spaces Coordinate Spaces Computer Graphics: Objects are rendered in the Euclidean Plane. However, the computational space is better viewed as one of Affine Space
Animation. CS 4620 Lecture 32. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
Aalto CS-C3100 Computer Graphics, Fall 2016
 Aalto CS-C3100 Computer Graphics, Fall 2016 Representation and Interpolation of Wikipedia user Blutfink Rotations...or, adventures on the 4D unit sphere Jaakko Lehtinen with lots of slides from Frédo Durand
Aalto CS-C3100 Computer Graphics, Fall 2016 Representation and Interpolation of Wikipedia user Blutfink Rotations...or, adventures on the 4D unit sphere Jaakko Lehtinen with lots of slides from Frédo Durand
12.1 Quaternions and Rotations
 Fall 2015 CSCI 420 Computer Graphics 12.1 Quaternions and Rotations Hao Li http://cs420.hao-li.com 1 Rotations Very important in computer animation and robotics Joint angles, rigid body orientations, camera
Fall 2015 CSCI 420 Computer Graphics 12.1 Quaternions and Rotations Hao Li http://cs420.hao-li.com 1 Rotations Very important in computer animation and robotics Joint angles, rigid body orientations, camera
Quaternions and Rotations
 CSCI 420 Computer Graphics Lecture 20 and Rotations Rotations Motion Capture [Angel Ch. 3.14] Rotations Very important in computer animation and robotics Joint angles, rigid body orientations, camera parameters
CSCI 420 Computer Graphics Lecture 20 and Rotations Rotations Motion Capture [Angel Ch. 3.14] Rotations Very important in computer animation and robotics Joint angles, rigid body orientations, camera parameters
Quaternions and Rotations
 CSCI 480 Computer Graphics Lecture 20 and Rotations April 6, 2011 Jernej Barbic Rotations Motion Capture [Ch. 4.12] University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s11/ 1 Rotations
CSCI 480 Computer Graphics Lecture 20 and Rotations April 6, 2011 Jernej Barbic Rotations Motion Capture [Ch. 4.12] University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s11/ 1 Rotations
ME 597: AUTONOMOUS MOBILE ROBOTICS SECTION 2 COORDINATE TRANSFORMS. Prof. Steven Waslander
 ME 597: AUTONOMOUS MOILE ROOTICS SECTION 2 COORDINATE TRANSFORMS Prof. Steven Waslander OUTLINE Coordinate Frames and Transforms Rotation Matrices Euler Angles Quaternions Homogeneous Transforms 2 COORDINATE
ME 597: AUTONOMOUS MOILE ROOTICS SECTION 2 COORDINATE TRANSFORMS Prof. Steven Waslander OUTLINE Coordinate Frames and Transforms Rotation Matrices Euler Angles Quaternions Homogeneous Transforms 2 COORDINATE
Transformations. CS 537 Interactive Computer Graphics Prof. David E. Breen Department of Computer Science
 Transformations CS 537 Interactive Computer Graphics Prof. David E. Breen Department of Computer Science 1 Objectives Introduce standard transformations - Rotation - Translation - Scaling - Shear Derive
Transformations CS 537 Interactive Computer Graphics Prof. David E. Breen Department of Computer Science 1 Objectives Introduce standard transformations - Rotation - Translation - Scaling - Shear Derive
Rotation with Quaternions
 Rotation with Quaternions Contents 1 Introduction 1.1 Translation................... 1. Rotation..................... 3 Quaternions 5 3 Rotations Represented as Quaternions 6 3.1 Dynamics....................
Rotation with Quaternions Contents 1 Introduction 1.1 Translation................... 1. Rotation..................... 3 Quaternions 5 3 Rotations Represented as Quaternions 6 3.1 Dynamics....................
Objectives. transformation. General Transformations. Affine Transformations. Notation. Pipeline Implementation. Introduce standard transformations
 Objectives Transformations CS Interactive Computer Graphics Prof. David E. Breen Department of Computer Science Introduce standard transformations - Rotation - Translation - Scaling - Shear Derive homogeneous
Objectives Transformations CS Interactive Computer Graphics Prof. David E. Breen Department of Computer Science Introduce standard transformations - Rotation - Translation - Scaling - Shear Derive homogeneous
Lecture Note 3: Rotational Motion
 ECE5463: Introduction to Robotics Lecture Note 3: Rotational Motion Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 3 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 3: Rotational Motion Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 3 (ECE5463
Splines & Quaternions (splines.txt) by Jochen Wilhelmy a.k.a. digisnap
 by Jochen Wilhelmy a.k.a. digisnap") Splines & Quaternions (splines.txt) ----------------------------------- by Jochen Wilhelmy a.k.a. digisnap digisnap@cs.tu-berlin.de 06.08.1997 Introduction ============ This text describes the spline and
Splines & Quaternions (splines.txt) ----------------------------------- by Jochen Wilhelmy a.k.a. digisnap digisnap@cs.tu-berlin.de 06.08.1997 Introduction ============ This text describes the spline and
Quaternion Rotations AUI Course Denbigh Starkey
 Major points of these notes: Quaternion Rotations AUI Course Denbigh Starkey. What I will and won t be doing. Definition of a quaternion and notation 3 3. Using quaternions to rotate any point around an
Major points of these notes: Quaternion Rotations AUI Course Denbigh Starkey. What I will and won t be doing. Definition of a quaternion and notation 3 3. Using quaternions to rotate any point around an
CMSC 425: Lecture 6 Affine Transformations and Rotations
 CMSC 45: Lecture 6 Affine Transformations and Rotations Affine Transformations: So far we have been stepping through the basic elements of geometric programming. We have discussed points, vectors, and
CMSC 45: Lecture 6 Affine Transformations and Rotations Affine Transformations: So far we have been stepping through the basic elements of geometric programming. We have discussed points, vectors, and
3-D D Euclidean Space - Vectors
 3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
CS354 Computer Graphics Rotations and Quaternions
 Slide Credit: Don Fussell CS354 Computer Graphics Rotations and Quaternions Qixing Huang April 4th 2018 Orientation Position and Orientation The position of an object can be represented as a translation
Slide Credit: Don Fussell CS354 Computer Graphics Rotations and Quaternions Qixing Huang April 4th 2018 Orientation Position and Orientation The position of an object can be represented as a translation
3D Kinematics. Consists of two parts
 D Kinematics Consists of two parts D rotation D translation The same as D D rotation is more complicated than D rotation (restricted to z-ais) Net, we will discuss the treatment for spatial (D) rotation
D Kinematics Consists of two parts D rotation D translation The same as D D rotation is more complicated than D rotation (restricted to z-ais) Net, we will discuss the treatment for spatial (D) rotation
Computer Animation. Rick Parent
 Algorithms and Techniques Interpolating Values Animation Animator specified interpolation key frame Algorithmically controlled Physics-based Behavioral Data-driven motion capture Motivation Common problem:
Algorithms and Techniques Interpolating Values Animation Animator specified interpolation key frame Algorithmically controlled Physics-based Behavioral Data-driven motion capture Motivation Common problem:
3D Mathematics. Co-ordinate systems, 3D primitives and affine transformations
 3D Mathematics Co-ordinate systems, 3D primitives and affine transformations Coordinate Systems 2 3 Primitive Types and Topologies Primitives Primitive Types and Topologies 4 A primitive is the most basic
3D Mathematics Co-ordinate systems, 3D primitives and affine transformations Coordinate Systems 2 3 Primitive Types and Topologies Primitives Primitive Types and Topologies 4 A primitive is the most basic
Inertial Measurement Units II!
 ! Inertial Measurement Units II! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 10! stanford.edu/class/ee267/!! wikipedia! Polynesian Migration! Lecture Overview! short review of
! Inertial Measurement Units II! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 10! stanford.edu/class/ee267/!! wikipedia! Polynesian Migration! Lecture Overview! short review of
Visualizing Quaternions
 Visualizing Quaternions Andrew J. Hanson Computer Science Department Indiana University Siggraph 25 Tutorial OUTLINE I: (45min) Twisting Belts, Rolling Balls, and Locking Gimbals: Explaining Rotation Sequences
Visualizing Quaternions Andrew J. Hanson Computer Science Department Indiana University Siggraph 25 Tutorial OUTLINE I: (45min) Twisting Belts, Rolling Balls, and Locking Gimbals: Explaining Rotation Sequences
CS D Transformation. Junqiao Zhao 赵君峤
 CS10101001 3D Transformation Junqiao Zhao 赵君峤 Department of Computer Science and Technology College of Electronics and Information Engineering Tongji University Review Translation Linear transformation
CS10101001 3D Transformation Junqiao Zhao 赵君峤 Department of Computer Science and Technology College of Electronics and Information Engineering Tongji University Review Translation Linear transformation
Transformation. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Transformation Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Project
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Transformation Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Project
Attitude Representation
 Attitude Representation Basilio Bona DAUIN Politecnico di Torino Semester 1, 015-16 B. Bona (DAUIN) Attitude Representation Semester 1, 015-16 1 / 3 Mathematical preliminaries A 3D rotation matrix R =
Attitude Representation Basilio Bona DAUIN Politecnico di Torino Semester 1, 015-16 B. Bona (DAUIN) Attitude Representation Semester 1, 015-16 1 / 3 Mathematical preliminaries A 3D rotation matrix R =
Coordinate Transformations. Coordinate Transformation. Problem in animation. Coordinate Transformation. Rendering Pipeline $ = $! $ ! $!
 Rendering Pipeline Another look at rotation Photography: real scene camera (captures light) photo processing Photographic print processing Computer Graphics: 3D models camera tone model reproduction (focuses
Rendering Pipeline Another look at rotation Photography: real scene camera (captures light) photo processing Photographic print processing Computer Graphics: 3D models camera tone model reproduction (focuses
Incremental Image Synthesis
 Incremental Image Synthesis Balázs Csébfalvi Department of Control Engineering and Information Technology email: cseb@iit.bme.hu Web: http://www.iit.bme.hu/~cseb Incremental image synthesis Shading and
Incremental Image Synthesis Balázs Csébfalvi Department of Control Engineering and Information Technology email: cseb@iit.bme.hu Web: http://www.iit.bme.hu/~cseb Incremental image synthesis Shading and
2D and 3D Coordinate Systems and Transformations
 Graphics & Visualization Chapter 3 2D and 3D Coordinate Systems and Transformations Graphics & Visualization: Principles & Algorithms Introduction In computer graphics is often necessary to change: the
Graphics & Visualization Chapter 3 2D and 3D Coordinate Systems and Transformations Graphics & Visualization: Principles & Algorithms Introduction In computer graphics is often necessary to change: the
CS 475 / CS 675 Computer Graphics. Lecture 16 : Interpolation for Animation
 CS 475 / CS 675 Computer Graphics Lecture 16 : Interpolation for Keyframing Selected (key) frames are specified. Interpolation of intermediate frames. Simple and popular approach. May give incorrect (inconsistent)
CS 475 / CS 675 Computer Graphics Lecture 16 : Interpolation for Keyframing Selected (key) frames are specified. Interpolation of intermediate frames. Simple and popular approach. May give incorrect (inconsistent)
Computer Animation Fundamentals. Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics
 Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Chapter 3 : Computer Animation
 Chapter 3 : Computer Animation Histor First animation films (Disne) 30 drawings / second animator in chief : ke frames others : secondar drawings Use the computer to interpolate? positions orientations
Chapter 3 : Computer Animation Histor First animation films (Disne) 30 drawings / second animator in chief : ke frames others : secondar drawings Use the computer to interpolate? positions orientations
Part II: OUTLINE. Visualizing Quaternions. Part II: Visualizing Quaternion Geometry. The Spherical Projection Trick: Visualizing unit vectors.
 Visualizing Quaternions Part II: Visualizing Quaternion Geometry Andrew J. Hanson Indiana University Part II: OUTLINE The Spherical Projection Trick: Visualizing unit vectors. Quaternion Frames Quaternion
Visualizing Quaternions Part II: Visualizing Quaternion Geometry Andrew J. Hanson Indiana University Part II: OUTLINE The Spherical Projection Trick: Visualizing unit vectors. Quaternion Frames Quaternion
Animation. Computer Graphics COMP 770 (236) Spring Instructor: Brandon Lloyd 4/23/07 1
 Spring Instructor: Brandon Lloyd 4/23/07 1") Animation Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 4/23/07 1 Today s Topics Interpolation Forward and inverse kinematics Rigid body simulation Fluids Particle systems Behavioral
Animation Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 4/23/07 1 Today s Topics Interpolation Forward and inverse kinematics Rigid body simulation Fluids Particle systems Behavioral
QUATERNIONS AND ROTATIONS
 1 CHAPTER 6. QUATERNIONS AND ROTATIONS 1 INSTITIÚID TEICNEOLAÍOCHTA CHEATHARLACH INSTITUTE OF TECHNOLOGY CARLOW QUATERNIONS AND ROTATIONS 1 Quaternions and Rotations 1.1 Introduction William Rowan Hamilton
1 CHAPTER 6. QUATERNIONS AND ROTATIONS 1 INSTITIÚID TEICNEOLAÍOCHTA CHEATHARLACH INSTITUTE OF TECHNOLOGY CARLOW QUATERNIONS AND ROTATIONS 1 Quaternions and Rotations 1.1 Introduction William Rowan Hamilton
Rotation and Orientation: Fundamentals. Perelyaev Sergei VARNA, 2011
 Rotation and Orientation: Fundamentals Perelyaev Sergei VARNA, 0 What is Rotation? Not intuitive Formal definitions are also confusing Many different ways to describe Rotation (direction cosine) matri
Rotation and Orientation: Fundamentals Perelyaev Sergei VARNA, 0 What is Rotation? Not intuitive Formal definitions are also confusing Many different ways to describe Rotation (direction cosine) matri
Quaternions and Euler Angles
 Quaternions and Euler Angles Revision #1 This document describes how the VR Audio Kit handles the orientation of the 3D Sound One headset using quaternions and Euler angles, and how to convert between
Quaternions and Euler Angles Revision #1 This document describes how the VR Audio Kit handles the orientation of the 3D Sound One headset using quaternions and Euler angles, and how to convert between
CSC418 / CSCD18 / CSC2504
 5 5.1 Surface Representations As with 2D objects, we can represent 3D objects in parametric and implicit forms. (There are also explicit forms for 3D surfaces sometimes called height fields but we will
5 5.1 Surface Representations As with 2D objects, we can represent 3D objects in parametric and implicit forms. (There are also explicit forms for 3D surfaces sometimes called height fields but we will
Orientation & Quaternions
 Orientation & Quaternions Orientation Position and Orientation The position of an object can be represented as a translation of the object from the origin The orientation of an object can be represented
Orientation & Quaternions Orientation Position and Orientation The position of an object can be represented as a translation of the object from the origin The orientation of an object can be represented
Homework 5: Transformations in geometry
 Math b: Linear Algebra Spring 08 Homework 5: Transformations in geometry This homework is due on Wednesday, February 7, respectively on Thursday February 8, 08. a) Find the reflection matrix at the line
Math b: Linear Algebra Spring 08 Homework 5: Transformations in geometry This homework is due on Wednesday, February 7, respectively on Thursday February 8, 08. a) Find the reflection matrix at the line
a a= a a =a a 1 =1 Division turned out to be equivalent to multiplication: a b= a b =a 1 b
 MATH 245 Extra Effort ( points) My assistant read through my first draft, got half a page in, and skipped to the end. So I will save you the flipping. Here is the assignment. Do just one of them. All the
MATH 245 Extra Effort ( points) My assistant read through my first draft, got half a page in, and skipped to the end. So I will save you the flipping. Here is the assignment. Do just one of them. All the
Le s s on 02. Basic methods in Computer Animation
 Le s s on 02 Basic methods in Computer Animation Lesson 02 Outline Key-framing and parameter interpolation Skeleton Animation Forward and inverse Kinematics Procedural techniques Motion capture Key-framing
Le s s on 02 Basic methods in Computer Animation Lesson 02 Outline Key-framing and parameter interpolation Skeleton Animation Forward and inverse Kinematics Procedural techniques Motion capture Key-framing
Visualizing Quaternions
 Visualizing Quaternions Andrew J. Hanson Computer Science Department Indiana University Siggraph 1 Tutorial 1 GRAND PLAN I: Fundamentals of Quaternions II: Visualizing Quaternion Geometry III: Quaternion
Visualizing Quaternions Andrew J. Hanson Computer Science Department Indiana University Siggraph 1 Tutorial 1 GRAND PLAN I: Fundamentals of Quaternions II: Visualizing Quaternion Geometry III: Quaternion
2D and 3D Transformations AUI Course Denbigh Starkey
 2D and 3D Transformations AUI Course Denbigh Starkey. Introduction 2 2. 2D transformations using Cartesian coordinates 3 2. Translation 3 2.2 Rotation 4 2.3 Scaling 6 3. Introduction to homogeneous coordinates
2D and 3D Transformations AUI Course Denbigh Starkey. Introduction 2 2. 2D transformations using Cartesian coordinates 3 2. Translation 3 2.2 Rotation 4 2.3 Scaling 6 3. Introduction to homogeneous coordinates
Computer Vision. Coordinates. Prof. Flávio Cardeal DECOM / CEFET- MG.
 Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Graphics. Chapter 5 Geometric Transformations. Somsak Walairacht, Computer Engineering, KMITL
 Chapter 5 Geometric Transformations Somsak Walairacht, Computer Engineering, KMITL 1 Outline Basic Two-Dimensional Geometric Transformations Matrix Representations and Homogeneous Coordinates Inverse Transformations
Chapter 5 Geometric Transformations Somsak Walairacht, Computer Engineering, KMITL 1 Outline Basic Two-Dimensional Geometric Transformations Matrix Representations and Homogeneous Coordinates Inverse Transformations
3D Transformation. In 3D, we have x, y, and z. We will continue use column vectors:. Homogenous systems:. x y z. x y z. glvertex3f(x, y,z);
;") 3D Transformation In 3D, we have x, y, and z. We will continue use column vectors:. Homogenous systems:. 3D Transformation glvertex3f(x, y,z); x y z x y z A Right Handle Coordinate System x y z; y z x;
3D Transformation In 3D, we have x, y, and z. We will continue use column vectors:. Homogenous systems:. 3D Transformation glvertex3f(x, y,z); x y z x y z A Right Handle Coordinate System x y z; y z x;
Transformations. Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico
 Transformations Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico Angel: Interactive Computer Graphics 4E Addison-Wesley 25 1 Objectives
Transformations Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico Angel: Interactive Computer Graphics 4E Addison-Wesley 25 1 Objectives
IMAGE-BASED RENDERING AND ANIMATION
 DH2323 DGI17 INTRODUCTION TO COMPUTER GRAPHICS AND INTERACTION IMAGE-BASED RENDERING AND ANIMATION Christopher Peters CST, KTH Royal Institute of Technology, Sweden chpeters@kth.se http://kth.academia.edu/christopheredwardpeters
DH2323 DGI17 INTRODUCTION TO COMPUTER GRAPHICS AND INTERACTION IMAGE-BASED RENDERING AND ANIMATION Christopher Peters CST, KTH Royal Institute of Technology, Sweden chpeters@kth.se http://kth.academia.edu/christopheredwardpeters
Kinematics. CS 448D: Character Animation Prof. Vladlen Koltun Stanford University
 Kinematics CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Kinematics Kinematics: The science of pure motion, considered without reference to the matter of objects moved, or to the
Kinematics CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Kinematics Kinematics: The science of pure motion, considered without reference to the matter of objects moved, or to the
CS230 : Computer Graphics Lecture 12: Introduction to Animation. Tamar Shinar Computer Science & Engineering UC Riverside
 CS230 : Computer Graphics Lecture 12: Introduction to Animation Tamar Shinar Computer Science & Engineering UC Riverside Types of animation keyframing rotoscoping stop motion procedural simulation motion
CS230 : Computer Graphics Lecture 12: Introduction to Animation Tamar Shinar Computer Science & Engineering UC Riverside Types of animation keyframing rotoscoping stop motion procedural simulation motion
Vector Calculus: Understanding the Cross Product
 University of Babylon College of Engineering Mechanical Engineering Dept. Subject : Mathematics III Class : 2 nd year - first semester Date: / 10 / 2016 2016 \ 2017 Vector Calculus: Understanding the Cross
University of Babylon College of Engineering Mechanical Engineering Dept. Subject : Mathematics III Class : 2 nd year - first semester Date: / 10 / 2016 2016 \ 2017 Vector Calculus: Understanding the Cross
Rotational Joint Limits in Quaternion Space. Gino van den Bergen Dtecta
 Rotational Joint Limits in Quaternion Space Gino van den Bergen Dtecta Rotational Joint Limits: 1 DoF Image: Autodesk, Creative Commons Rotational Joint Limits: 3 DoFs Image: Autodesk, Creative Commons
Rotational Joint Limits in Quaternion Space Gino van den Bergen Dtecta Rotational Joint Limits: 1 DoF Image: Autodesk, Creative Commons Rotational Joint Limits: 3 DoFs Image: Autodesk, Creative Commons
Reading. Topics in Articulated Animation. Character Representation. Animation. q i. t 1 t 2. Articulated models: Character Models are rich, complex
 Shoemake, Quaternions Tutorial Reading Topics in Articulated Animation 2 Articulated models: rigid parts connected by joints Animation They can be animated by specifying the joint angles (or other display
Shoemake, Quaternions Tutorial Reading Topics in Articulated Animation 2 Articulated models: rigid parts connected by joints Animation They can be animated by specifying the joint angles (or other display
Analysis of Euler Angles in a Simple Two-Axis Gimbals Set
 Vol:5, No:9, 2 Analysis of Euler Angles in a Simple Two-Axis Gimbals Set Ma Myint Myint Aye International Science Index, Mechanical and Mechatronics Engineering Vol:5, No:9, 2 waset.org/publication/358
Vol:5, No:9, 2 Analysis of Euler Angles in a Simple Two-Axis Gimbals Set Ma Myint Myint Aye International Science Index, Mechanical and Mechatronics Engineering Vol:5, No:9, 2 waset.org/publication/358
Quaternions. Ken Shoemake Department of Computer and Information Science University of Pennsylvania Philadelphia, PA 19104
 Abstract Quaternions Ken Shoemake Department of Computer and Information Science University of Pennsylvania Philadelphia, PA 19104 Of the many mathematical tools used in computer graphics, most are well
Abstract Quaternions Ken Shoemake Department of Computer and Information Science University of Pennsylvania Philadelphia, PA 19104 Of the many mathematical tools used in computer graphics, most are well
Hw 4 Due Feb 22. D(fg) x y z (
 x y z (") Hw 4 Due Feb 22 2.2 Exercise 7,8,10,12,15,18,28,35,36,46 2.3 Exercise 3,11,39,40,47(b) 2.4 Exercise 6,7 Use both the direct method and product rule to calculate where f(x, y, z) = 3x, g(x, y, z) = ( 1
Hw 4 Due Feb 22 2.2 Exercise 7,8,10,12,15,18,28,35,36,46 2.3 Exercise 3,11,39,40,47(b) 2.4 Exercise 6,7 Use both the direct method and product rule to calculate where f(x, y, z) = 3x, g(x, y, z) = ( 1
PSE Game Physics. Session (3) Springs, Ropes, Linear Momentum and Rotations. Oliver Meister, Roland Wittmann
 Springs, Ropes, Linear Momentum and Rotations. Oliver Meister, Roland Wittmann") PSE Game Physics Session (3) Springs, Ropes, Linear Momentum and Rotations Oliver Meister, Roland Wittmann 08.05.2015 Session (3) Springs, Ropes, Linear Momentum and Rotations, 08.05.2015 1 Outline Springs
PSE Game Physics Session (3) Springs, Ropes, Linear Momentum and Rotations Oliver Meister, Roland Wittmann 08.05.2015 Session (3) Springs, Ropes, Linear Momentum and Rotations, 08.05.2015 1 Outline Springs
Application of Quaternion Interpolation (SLERP) to the Orientation Control of 6-Axis Articulated Robot using LabVIEW and RecurDyn
 to the Orientation Control of 6-Axis Articulated Robot using LabVIEW and RecurDyn") Application of Quaternion Interpolation (SLERP) to the Orientation Control of 6-Axis Articulated Robot using LabVIEW and RecurDyn Jin Su Ahn 1, Won Jee Chung 1, Su Seong Park 1 1 School of Mechatronics,
Application of Quaternion Interpolation (SLERP) to the Orientation Control of 6-Axis Articulated Robot using LabVIEW and RecurDyn Jin Su Ahn 1, Won Jee Chung 1, Su Seong Park 1 1 School of Mechatronics,
Interactive Computer Graphics. Hearn & Baker, chapter D transforms Hearn & Baker, chapter 5. Aliasing and Anti-Aliasing
 Interactive Computer Graphics Aliasing and Anti-Aliasing Hearn & Baker, chapter 4-7 D transforms Hearn & Baker, chapter 5 Aliasing and Anti-Aliasing Problem: jaggies Also known as aliasing. It results
Interactive Computer Graphics Aliasing and Anti-Aliasing Hearn & Baker, chapter 4-7 D transforms Hearn & Baker, chapter 5 Aliasing and Anti-Aliasing Problem: jaggies Also known as aliasing. It results
Animation. Animation
 CS475m - Computer Graphics Lecture 5 : Interpolation for Selected (key) frames are specified. Interpolation of intermediate frames. Simple and popular approach. May give incorrect (inconsistent) results.
CS475m - Computer Graphics Lecture 5 : Interpolation for Selected (key) frames are specified. Interpolation of intermediate frames. Simple and popular approach. May give incorrect (inconsistent) results.
Short on camera geometry and camera calibration
 Short on camera geometry and camera calibration Maria Magnusson, maria.magnusson@liu.se Computer Vision Laboratory, Department of Electrical Engineering, Linköping University, Sweden Report No: LiTH-ISY-R-3070
Short on camera geometry and camera calibration Maria Magnusson, maria.magnusson@liu.se Computer Vision Laboratory, Department of Electrical Engineering, Linköping University, Sweden Report No: LiTH-ISY-R-3070
Mobile Application Programming: Android. OpenGL ES 3D
 Mobile Application Programming: Android OpenGL ES 3D All Points Transformations xf = xo + tx yf = yo + ty xf = xo sx yf = yo sy xf = xi cosθ - yi sinθ yf = xi sinθ + yi cosθ All Points Transformations
Mobile Application Programming: Android OpenGL ES 3D All Points Transformations xf = xo + tx yf = yo + ty xf = xo sx yf = yo sy xf = xi cosθ - yi sinθ yf = xi sinθ + yi cosθ All Points Transformations
Comparison of practically applicable mathematical descriptions of orientation and rotation in the three-dimensional Euclidean space
 Comparison of practically applicable mathematical descriptions of orientation and rotation in the three-dimensional Euclidean space Prof. Dr.-Ing. R. Müller, Dipl.-Wirt.-Ing. (FH) M. Vette M.Eng. and A.
Comparison of practically applicable mathematical descriptions of orientation and rotation in the three-dimensional Euclidean space Prof. Dr.-Ing. R. Müller, Dipl.-Wirt.-Ing. (FH) M. Vette M.Eng. and A.
Hello, welcome to the video lecture series on Digital Image Processing. So in today's lecture
 Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module 02 Lecture Number 10 Basic Transform (Refer
Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module 02 Lecture Number 10 Basic Transform (Refer
Computer Animation III
 Computer Animation III Quaternions Dynamics Some slides courtesy of Leonard McMillan and Jovan Popovic Recap: Euler angles 3 angles along 3 axis Poor interpolation, lock But used in flight simulation,
Computer Animation III Quaternions Dynamics Some slides courtesy of Leonard McMillan and Jovan Popovic Recap: Euler angles 3 angles along 3 axis Poor interpolation, lock But used in flight simulation,
Quaternions and Exponentials
 Quaternions and Exponentials Michael Kazhdan (601.457/657) HB A.6 FvDFH 21.1.3 Announcements OpenGL review II: Today at 9:00pm, Malone 228 This week's graphics reading seminar: Today 2:00-3:00pm, my office
Quaternions and Exponentials Michael Kazhdan (601.457/657) HB A.6 FvDFH 21.1.3 Announcements OpenGL review II: Today at 9:00pm, Malone 228 This week's graphics reading seminar: Today 2:00-3:00pm, my office
Introduction to quaternions. Mathematics. Operations
 Introduction to quaternions Topics: Definition Mathematics Operations Euler Angles (optional) intro to quaternions 1 noel.h.hughes@gmail.com Euler's Theorem y y Angle! rotation follows right hand rule
Introduction to quaternions Topics: Definition Mathematics Operations Euler Angles (optional) intro to quaternions 1 noel.h.hughes@gmail.com Euler's Theorem y y Angle! rotation follows right hand rule
Animation. CS 4620 Lecture 33. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Rotation parameters for model building and stable parameter inversion in orthorhombic media Cintia Lapilli* and Paul J. Fowler, WesternGeco.
 otation parameters for model building and stable parameter inversion in orthorhombic media Cintia Lapilli* and Paul J Fowler, WesternGeco Summary Symmetry groups commonly used to describe seismic anisotropy
otation parameters for model building and stable parameter inversion in orthorhombic media Cintia Lapilli* and Paul J Fowler, WesternGeco Summary Symmetry groups commonly used to describe seismic anisotropy
Exercise 1: Kinematics of the ABB IRB 120
 Exercise 1: Kinematics of the ABB IRB 120 Marco Hutter, Michael Blösch, Dario Bellicoso, Samuel Bachmann October 2, 2015 Abstract In this exercise you learn how to calculate the forward and inverse kinematics
Exercise 1: Kinematics of the ABB IRB 120 Marco Hutter, Michael Blösch, Dario Bellicoso, Samuel Bachmann October 2, 2015 Abstract In this exercise you learn how to calculate the forward and inverse kinematics
Object Representation Affine Transforms. Polygonal Representation. Polygonal Representation. Polygonal Representation of Objects
 Object Representation Affine Transforms Polygonal Representation of Objects Although perceivable the simplest form of representation they can also be the most problematic. To represent an object polygonally,
Object Representation Affine Transforms Polygonal Representation of Objects Although perceivable the simplest form of representation they can also be the most problematic. To represent an object polygonally,
MATHEMATICS FOR ENGINEERING TUTORIAL 5 COORDINATE SYSTEMS
 MATHEMATICS FOR ENGINEERING TUTORIAL 5 COORDINATE SYSTEMS This tutorial is essential pre-requisite material for anyone studying mechanical engineering. This tutorial uses the principle of learning by example.
MATHEMATICS FOR ENGINEERING TUTORIAL 5 COORDINATE SYSTEMS This tutorial is essential pre-requisite material for anyone studying mechanical engineering. This tutorial uses the principle of learning by example.
Quaternions: From Classical Mechanics to Computer Graphics, and Beyond
 Proceedings of the 7 th Asian Technology Conference in Mathematics 2002. Invited Paper Quaternions: From Classical Mechanics to Computer Graphics, and Beyond R. Mukundan Department of Computer Science
Proceedings of the 7 th Asian Technology Conference in Mathematics 2002. Invited Paper Quaternions: From Classical Mechanics to Computer Graphics, and Beyond R. Mukundan Department of Computer Science
Advanced Computer Graphics Transformations. Matthias Teschner
 Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
Game Engineering CS S-05 Linear Transforms
 Game Engineering CS420-2016S-05 Linear Transforms David Galles Department of Computer Science University of San Francisco 05-0: Matrices as Transforms Recall that Matrices are transforms Transform vectors
Game Engineering CS420-2016S-05 Linear Transforms David Galles Department of Computer Science University of San Francisco 05-0: Matrices as Transforms Recall that Matrices are transforms Transform vectors
Animations. Hakan Bilen University of Edinburgh. Computer Graphics Fall Some slides are courtesy of Steve Marschner and Kavita Bala
 Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Section Parametrized Surfaces and Surface Integrals. (I) Parametrizing Surfaces (II) Surface Area (III) Scalar Surface Integrals
 Parametrizing Surfaces (II) Surface Area (III) Scalar Surface Integrals") Section 16.4 Parametrized Surfaces and Surface Integrals (I) Parametrizing Surfaces (II) Surface Area (III) Scalar Surface Integrals MATH 127 (Section 16.4) Parametrized Surfaces and Surface Integrals
Section 16.4 Parametrized Surfaces and Surface Integrals (I) Parametrizing Surfaces (II) Surface Area (III) Scalar Surface Integrals MATH 127 (Section 16.4) Parametrized Surfaces and Surface Integrals
Mobile Application Programming. OpenGL ES 3D
 Mobile Application Programming OpenGL ES 3D All Points Transformations xf = xo + tx yf = yo + ty xf = xo sx yf = yo sy xf = xi cosθ - yi sinθ yf = xi sinθ + yi cosθ All Points Transformations xf = xo +
Mobile Application Programming OpenGL ES 3D All Points Transformations xf = xo + tx yf = yo + ty xf = xo sx yf = yo sy xf = xi cosθ - yi sinθ yf = xi sinθ + yi cosθ All Points Transformations xf = xo +
Elements of three dimensional geometry
 Lecture No-3 Elements of three dimensional geometr Distance formula in three dimension Let P( x1, 1, z1) and Q( x2, 2, z 2) be two points such that PQ is not parallel to one of the 2 2 2 coordinate axis
Lecture No-3 Elements of three dimensional geometr Distance formula in three dimension Let P( x1, 1, z1) and Q( x2, 2, z 2) be two points such that PQ is not parallel to one of the 2 2 2 coordinate axis
For each question, indicate whether the statement is true or false by circling T or F, respectively.
 True/False For each question, indicate whether the statement is true or false by circling T or F, respectively. 1. (T/F) Rasterization occurs before vertex transformation in the graphics pipeline. 2. (T/F)
True/False For each question, indicate whether the statement is true or false by circling T or F, respectively. 1. (T/F) Rasterization occurs before vertex transformation in the graphics pipeline. 2. (T/F)
EE Kinematics & Inverse Kinematics
 Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1