CS4670/5670: Computer Vision Kavita Bala. Lec 19: Single- view modeling 2
|
|
|
- Rosaline Lyons
- 5 years ago
- Views:
Transcription
1 CS4670/5670: Computer Vision Kavita Bala Lec 19: Single- view modeling 2
2
3 Today Vanishing points in images are useful Recover size Camera calibrakon
4 Vanishing points image plane vanishing point V camera center C line on ground plane line on ground plane ProperKes Any two parallel lines (in 3D) have the same vanishing point v The ray from C through v is parallel to the lines An image may have more than one vanishing point in fact, every image point is a potenkal vanishing point
5 Vanishing lines v 1 v 2 MulKple Vanishing Points Any set of parallel lines on the plane define a vanishing point The union of all of these vanishing points is the horizon line also called vanishing line Note that different planes (can) define different vanishing lines
6 CompuKng vanishing lines v 1 l v 2 C l ground plane ProperKes l is interseckon of horizontal plane through C with image plane Compute l from two sets of parallel lines on ground plane All points at same height as C project to l points higher than C project above l Provides way of comparing height of objects in the scene
7 Comparing heights Vanishing Point
8 Measuring height How high is the camera? Camera height
9 CompuKng vanishing points (from lines) v q 1 q 2 p 2 p 1 Intersect p 1 q 1 with p 2 q 2 Least squares version Be]er to use more than two lines and compute the closest point of interseckon See notes by Bob Collins for one good way of doing this: h]p://www- 2.cs.cmu.edu/~ph/869/www/notes/vanishing.txt
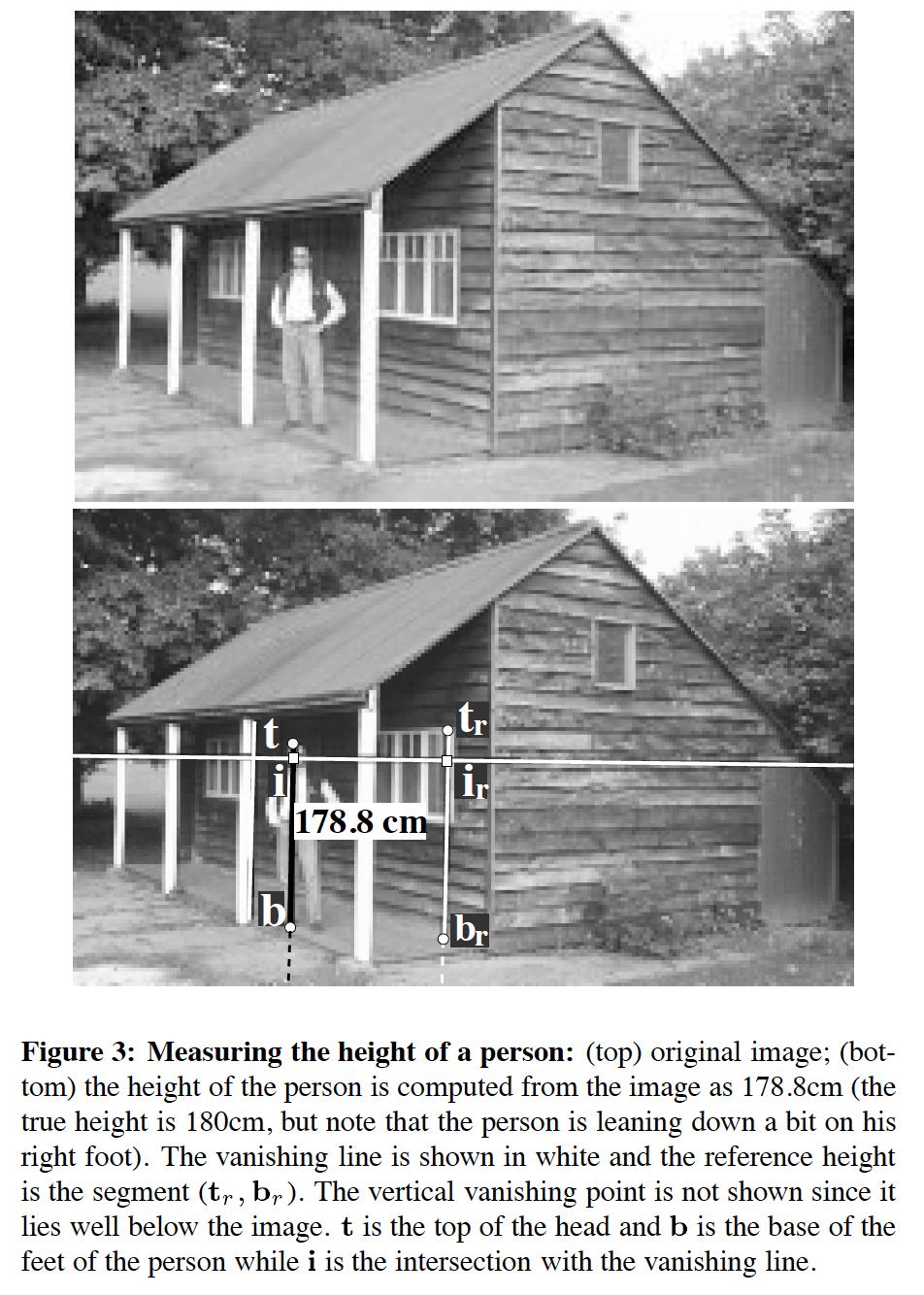
10 Measuring height without a ruler H R
11 Measuring height without a ruler C Z ground plane Compute Z from image measurements Actually get a scaled version of z
12 The cross rako A ProjecKve Invariant Something that does not change under projeckve transformakons (including perspeckve projeckon) P 1 P 2 P 3 P P P P P P P P P The cross- ra0o of 4 collinear points Can permute the point ordering 4! = 24 different orders (but only 6 disknct values) This is the fundamental invariant of projeckve geometry = 1 i i i i Z Y X P P P P P P P P P
13 Measuring height C b r t H T (top of object) R (reference point) R T B R R B T scene cross ra9o t b v Z r r b v Z t image cross ra9o = = H R H R v Z B (bo]om of object) ground plane scene points represented as P = X Y Z 1 image points as p = x y 1
14 Point and line duality A line l is a homogeneous 3- vector l p 1 p 2 l 2 l 1 p What is the line l spanned by rays p 1 and p 2? l is to p 1 and p 2 l = p 1 p 2 l can be interpreted as a plane normal What is the interseckon of two lines l 1 and l 2? p is to l 1 and l 2 p = l 1 l 2 Points and lines are dual in projeckve space
15 Measuring height v z r vanishing line (horizon) v x v t 0 H t R v y b 0 t r b b v v Z Z r t image cross ra9o = H R b

16 Measuring height v z r vanishing line (horizon) t 0 v x v v y m 0 t 1 b 1 b 0 What if the point on the ground plane b 0 is not known? Here the guy is standing on the box, height of box is known Use one side of the box to help find b 0 as shown above b
17

18 3D Modeling from a photograph St. Jerome in his Study, H. Steenwick

19 3D Modeling from a photograph
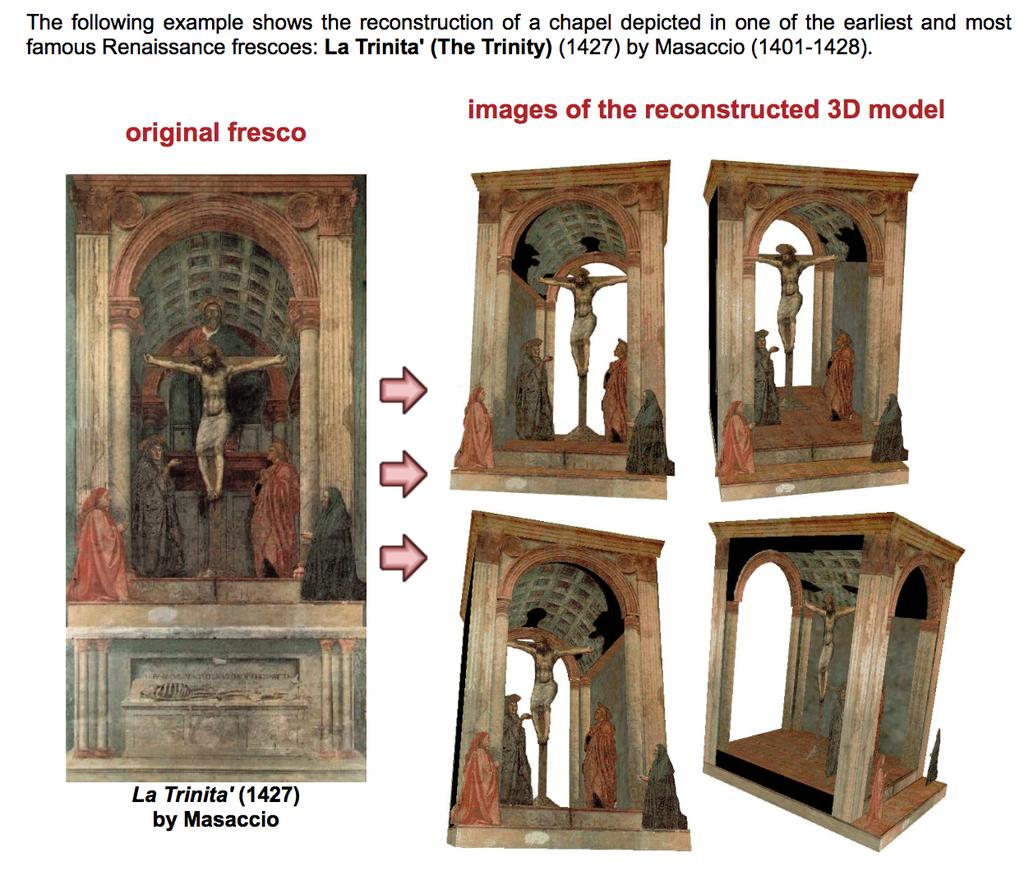
20 3D Modeling from a photograph Flagella0on, Piero della Francesca

21 3D Modeling from a photograph video by Antonio Criminisi

22 3D Modeling from a photograph
23
24 Some Related Techniques Image- Based Modeling and Photo EdiKng Mok et al., SIGGRAPH 2001 Single View Modeling of Free- Form Scenes Zhang et al., CVPR 2001 Tour Into The Picture Anjyo et al., SIGGRAPH 1997
25 Camera calibrakon Goal: eskmate the camera parameters Version 1: solve for projeckon matrix wx * * Y X * Z 1 x = wy = * * * * = ΠX w * * * Version 2: solve for camera parameters separately intrinsics (focal length, principle point, pixel size) extrinsics (rotakon angles, translakon) radial distorkon * *
26 CalibraKon using a reference object Place a known object in the scene idenkfy correspondence between image 2D and scene 3D compute mapping from scene to image Issues must know geometry very accurately must know 3D- >2D correspondence

27 EsKmaKng the projeckon matrix Place a known object in the scene idenkfy correspondence between image and scene compute mapping from scene to image
28 Direct linear calibrakon
29 Direct linear calibrakon Can solve for m ij by linear least squares use eigenvector trick that we used for homographies. A x = 0
30 Advantage: Direct linear calibrakon Very simple to formulate and solve Disadvantages: Doesn t tell you the camera parameters Doesn t model radial distorkon Hard to impose constraints (e.g., known f) Doesn t minimize the right error funckon Nonlinear methods are preferred Define error funckon E between projected 3D points and image posikons: nonlinear funckon of intrinsics, extrinsics, radial distorkon Minimize E using nonlinear opkmizakon techniques
31 Summary Known correspondences (ui, vi) and (Xi, Yi, Zi) Compute mij solving system of linear equakons May use this to inikalize non linear error minimizakon problem to recover more accurate mij

32 CalibraKon from vanishing points
33
34

35 RotaKon from vanishing points
36 Vanishing points and projeckon matrix * * * * Π = * * * * = [ π ] 1 π2 π3 π4 * * * * π π1 π2 π3 4 ProjecKon of x axis = v x (X vanishing point) similarly, π π = π = 2 v Y, 3 v Z T [ ] projection of world origin 4 = Π = Π = [ v v v o] X Not So Fast! We only know v s up to a scale factor Π = Y [ a v bv cv o] X Can fully specify by providing 3 reference points Y Z Z
 Matlab version by Jean- Yves Bouget: h]p://www.vision.caltech.edu/bouguetj/calib_doc/index.html Zhengyou Zhang s web site: h]p://research.microsou.")
37 AlternaKve: mulk- plane calibrakon Advantage Only requires a plane Images courtesy Jean- Yves Bouguet, Intel Corp. Don t have to know posikons/orientakons Good code available online! (including in OpenCV) Matlab version by Jean- Yves Bouget: h]p:// Zhengyou Zhang s web site: h]p://research.microsou.com/~zhang/calib/
38 Stereo Next Kme
More Single View Geometry
 More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Quiz: which is 1,2,3-point perspective Image
More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Quiz: which is 1,2,3-point perspective Image
Single-view metrology
 Single-view metrology Magritte, Personal Values, 952 Many slides from S. Seitz, D. Hoiem Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features
Single-view metrology Magritte, Personal Values, 952 Many slides from S. Seitz, D. Hoiem Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features
More Single View Geometry
 More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Final Projects Are coming up fast! Undergrads
More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Final Projects Are coming up fast! Undergrads
More Single View Geometry
 More Single View Geometry 5-463: Rendering and Image rocessing Alexei Efros with a lot of slides stolen from Steve Seitz and Antonio Criminisi Quiz! Image B Image A Image C How can we model this scene?.
More Single View Geometry 5-463: Rendering and Image rocessing Alexei Efros with a lot of slides stolen from Steve Seitz and Antonio Criminisi Quiz! Image B Image A Image C How can we model this scene?.
More Single View Geometry
 More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational hotography Alexei Efros, CMU, Fall 2011 Quiz: which is 1,2,3-point perspective Image
More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational hotography Alexei Efros, CMU, Fall 2011 Quiz: which is 1,2,3-point perspective Image
More Mosaic Madness. CS194: Image Manipulation & Computational Photography. Steve Seitz and Rick Szeliski. Jeffrey Martin (jeffrey-martin.
 More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
Scene Modeling for a Single View
 on to 3D Scene Modeling for a Single View We want real 3D scene walk-throughs: rotation translation Can we do it from a single photograph? Reading: A. Criminisi, I. Reid and A. Zisserman, Single View Metrology
on to 3D Scene Modeling for a Single View We want real 3D scene walk-throughs: rotation translation Can we do it from a single photograph? Reading: A. Criminisi, I. Reid and A. Zisserman, Single View Metrology
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
But First: Multi-View Projective Geometry
 View Morphing (Seitz & Dyer, SIGGRAPH 96) Virtual Camera Photograph Morphed View View interpolation (ala McMillan) but no depth no camera information Photograph But First: Multi-View Projective Geometry
View Morphing (Seitz & Dyer, SIGGRAPH 96) Virtual Camera Photograph Morphed View View interpolation (ala McMillan) but no depth no camera information Photograph But First: Multi-View Projective Geometry
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Projective geometry for Computer Vision
 Department of Computer Science and Engineering IIT Delhi NIT, Rourkela March 27, 2010 Overview Pin-hole camera Why projective geometry? Reconstruction Computer vision geometry: main problems Correspondence
Department of Computer Science and Engineering IIT Delhi NIT, Rourkela March 27, 2010 Overview Pin-hole camera Why projective geometry? Reconstruction Computer vision geometry: main problems Correspondence
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
ECE 470: Homework 5. Due Tuesday, October 27 in Seth Hutchinson. Luke A. Wendt
 ECE 47: Homework 5 Due Tuesday, October 7 in class @:3pm Seth Hutchinson Luke A Wendt ECE 47 : Homework 5 Consider a camera with focal length λ = Suppose the optical axis of the camera is aligned with
ECE 47: Homework 5 Due Tuesday, October 7 in class @:3pm Seth Hutchinson Luke A Wendt ECE 47 : Homework 5 Consider a camera with focal length λ = Suppose the optical axis of the camera is aligned with
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: :59AM
 CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
Single View Geometry. Camera model & Orientation + Position estimation. What am I?
 Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
The end of affine cameras
 The end of affine cameras Affine SFM revisited Epipolar geometry Two-view structure from motion Multi-view structure from motion Planches : http://www.di.ens.fr/~ponce/geomvis/lect3.pptx http://www.di.ens.fr/~ponce/geomvis/lect3.pdf
The end of affine cameras Affine SFM revisited Epipolar geometry Two-view structure from motion Multi-view structure from motion Planches : http://www.di.ens.fr/~ponce/geomvis/lect3.pptx http://www.di.ens.fr/~ponce/geomvis/lect3.pdf
Midterm Exam Solutions
 Midterm Exam Solutions Computer Vision (J. Košecká) October 27, 2009 HONOR SYSTEM: This examination is strictly individual. You are not allowed to talk, discuss, exchange solutions, etc., with other fellow
Midterm Exam Solutions Computer Vision (J. Košecká) October 27, 2009 HONOR SYSTEM: This examination is strictly individual. You are not allowed to talk, discuss, exchange solutions, etc., with other fellow
Camera models and calibration
 Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Assignment 2 : Projection and Homography
 TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
Compositing a bird's eye view mosaic
 Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
COMP 558 lecture 19 Nov. 17, 2010
 COMP 558 lecture 9 Nov. 7, 2 Camera calibration To estimate the geometry of 3D scenes, it helps to know the camera parameters, both external and internal. The problem of finding all these parameters is
COMP 558 lecture 9 Nov. 7, 2 Camera calibration To estimate the geometry of 3D scenes, it helps to know the camera parameters, both external and internal. The problem of finding all these parameters is
CSCI 5980: Assignment #3 Homography
 Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
Computer Vision cmput 428/615
 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Single-view 3D reasoning
 Single-view 3D reasoning Lecturer: Bryan Russell UW CSE 576, May 2013 Slides borrowed from Antonio Torralba, Alyosha Efros, Antonio Criminisi, Derek Hoiem, Steve Seitz, Stephen Palmer, Abhinav Gupta, James
Single-view 3D reasoning Lecturer: Bryan Russell UW CSE 576, May 2013 Slides borrowed from Antonio Torralba, Alyosha Efros, Antonio Criminisi, Derek Hoiem, Steve Seitz, Stephen Palmer, Abhinav Gupta, James
3D Geometric Computer Vision. Martin Jagersand Univ. Alberta Edmonton, Alberta, Canada
 3D Geometric Computer Vision Martin Jagersand Univ. Alberta Edmonton, Alberta, Canada Multi-view geometry Build 3D models from images Carry out manipulation tasks http://webdocs.cs.ualberta.ca/~vis/ibmr/
3D Geometric Computer Vision Martin Jagersand Univ. Alberta Edmonton, Alberta, Canada Multi-view geometry Build 3D models from images Carry out manipulation tasks http://webdocs.cs.ualberta.ca/~vis/ibmr/
Stereo Epipolar Geometry for General Cameras. Sanja Fidler CSC420: Intro to Image Understanding 1 / 33
 Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Perspective projection. A. Mantegna, Martyrdom of St. Christopher, c. 1450
 Perspective projection A. Mantegna, Martyrdom of St. Christopher, c. 1450 Overview of next two lectures The pinhole projection model Qualitative properties Perspective projection matrix Cameras with lenses
Perspective projection A. Mantegna, Martyrdom of St. Christopher, c. 1450 Overview of next two lectures The pinhole projection model Qualitative properties Perspective projection matrix Cameras with lenses
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: :59AM
 CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Automatic Photo Popup
 Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Multiple View Geometry in Computer Vision Second Edition
 Multiple View Geometry in Computer Vision Second Edition Richard Hartley Australian National University, Canberra, Australia Andrew Zisserman University of Oxford, UK CAMBRIDGE UNIVERSITY PRESS Contents
Multiple View Geometry in Computer Vision Second Edition Richard Hartley Australian National University, Canberra, Australia Andrew Zisserman University of Oxford, UK CAMBRIDGE UNIVERSITY PRESS Contents
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Multiple View Geometry in Computer Vision
 Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Projective 3D Geometry (Back to Chapter 2) Lecture 6 2 Singular Value Decomposition Given a
Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Projective 3D Geometry (Back to Chapter 2) Lecture 6 2 Singular Value Decomposition Given a
Lecture 7 Measurement Using a Single Camera. Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016
 Lecture 7 Measurement Using a Single Camera Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016 If I have an image containing a coin, can you tell me the diameter of that coin? Contents
Lecture 7 Measurement Using a Single Camera Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016 If I have an image containing a coin, can you tell me the diameter of that coin? Contents
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
CS-9645 Introduction to Computer Vision Techniques Winter 2019
 Table of Contents Projective Geometry... 1 Definitions...1 Axioms of Projective Geometry... Ideal Points...3 Geometric Interpretation... 3 Fundamental Transformations of Projective Geometry... 4 The D
Table of Contents Projective Geometry... 1 Definitions...1 Axioms of Projective Geometry... Ideal Points...3 Geometric Interpretation... 3 Fundamental Transformations of Projective Geometry... 4 The D
Lecture 9: Epipolar Geometry
 Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Introduction to Homogeneous coordinates
 Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Stereo CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Machine vision. Summary # 11: Stereo vision and epipolar geometry. u l = λx. v l = λy
 1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
Epipolar Geometry and Stereo Vision
 CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
Image Transformations & Camera Calibration. Mašinska vizija, 2018.
 Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
CS 664 Slides #9 Multi-Camera Geometry. Prof. Dan Huttenlocher Fall 2003
 CS 664 Slides #9 Multi-Camera Geometry Prof. Dan Huttenlocher Fall 2003 Pinhole Camera Geometric model of camera projection Image plane I, which rays intersect Camera center C, through which all rays pass
CS 664 Slides #9 Multi-Camera Geometry Prof. Dan Huttenlocher Fall 2003 Pinhole Camera Geometric model of camera projection Image plane I, which rays intersect Camera center C, through which all rays pass
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Image Based Rendering. D.A. Forsyth, with slides from John Hart
 Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Image Warping and Mosacing
 Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction
 Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Agenda. Perspective projection. Rotations. Camera models
 Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
Image Formation I Chapter 2 (R. Szelisky)
") Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Passive 3D Photography
 SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
Computer Vision I. Announcement. Stereo Vision Outline. Stereo II. CSE252A Lecture 15
 Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies
 Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Spatial track: range acquisition modeling
 Spatial track: range acquisition modeling Virginio Cantoni Laboratorio di Visione Artificiale Università di Pavia Via A. Ferrata 1, 27100 Pavia virginio.cantoni@unipv.it http://vision.unipv.it/va 1 The
Spatial track: range acquisition modeling Virginio Cantoni Laboratorio di Visione Artificiale Università di Pavia Via A. Ferrata 1, 27100 Pavia virginio.cantoni@unipv.it http://vision.unipv.it/va 1 The
Computer Vision Project-1
 University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe : Martin Stiaszny and Dana Qu LECTURE 0 Camera Calibration 0.. Introduction Just like the mythical frictionless plane, in real life we will
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe : Martin Stiaszny and Dana Qu LECTURE 0 Camera Calibration 0.. Introduction Just like the mythical frictionless plane, in real life we will
3D Vision Real Objects, Real Cameras. Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun,
, 12 (parts of) Computerized Image Analysis MN2 Anders Brun,") 3D Vision Real Objects, Real Cameras Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun, anders@cb.uu.se 3D Vision! Philisophy! Image formation " The pinhole camera " Projective
3D Vision Real Objects, Real Cameras Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun, anders@cb.uu.se 3D Vision! Philisophy! Image formation " The pinhole camera " Projective
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows
 ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Announcements. Mosaics. How to do it? Image Mosaics
 Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
COS429: COMPUTER VISON CAMERAS AND PROJECTIONS (2 lectures)
") COS429: COMPUTER VISON CMERS ND PROJECTIONS (2 lectures) Pinhole cameras Camera with lenses Sensing nalytical Euclidean geometry The intrinsic parameters of a camera The extrinsic parameters of a camera
COS429: COMPUTER VISON CMERS ND PROJECTIONS (2 lectures) Pinhole cameras Camera with lenses Sensing nalytical Euclidean geometry The intrinsic parameters of a camera The extrinsic parameters of a camera
3D Reconstruction of a Hopkins Landmark
 3D Reconstruction of a Hopkins Landmark Ayushi Sinha (461), Hau Sze (461), Diane Duros (361) Abstract - This paper outlines a method for 3D reconstruction from two images. Our procedure is based on known
3D Reconstruction of a Hopkins Landmark Ayushi Sinha (461), Hau Sze (461), Diane Duros (361) Abstract - This paper outlines a method for 3D reconstruction from two images. Our procedure is based on known
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Stereo Image Rectification for Simple Panoramic Image Generation
 Stereo Image Rectification for Simple Panoramic Image Generation Yun-Suk Kang and Yo-Sung Ho Gwangju Institute of Science and Technology (GIST) 261 Cheomdan-gwagiro, Buk-gu, Gwangju 500-712 Korea Email:{yunsuk,
Stereo Image Rectification for Simple Panoramic Image Generation Yun-Suk Kang and Yo-Sung Ho Gwangju Institute of Science and Technology (GIST) 261 Cheomdan-gwagiro, Buk-gu, Gwangju 500-712 Korea Email:{yunsuk,
521466S Machine Vision Exercise #1 Camera models
 52466S Machine Vision Exercise # Camera models. Pinhole camera. The perspective projection equations or a pinhole camera are x n = x c, = y c, where x n = [x n, ] are the normalized image coordinates,
52466S Machine Vision Exercise # Camera models. Pinhole camera. The perspective projection equations or a pinhole camera are x n = x c, = y c, where x n = [x n, ] are the normalized image coordinates,