Simulation: A Must for Autonomous Driving
|
|
|
- Arnold Valentine Simmons
- 5 years ago
- Views:
Transcription


1 Simulation: A Must for Autonomous Driving NVIDIA GTC 2018 (SILICON VALLEY) / Talk ID: S8859 Rohit Ramanna Business Development Manager Smart Virtual Prototyping, ESI North America Rodolphe Tchalekian EMEA Pre-Sales Engineer for ADAS, ESI Group March 28, 2018 Copyright ESI Copyright Group, ESI All Group, rights reserved All rights reserved. 1




2 Deep Learning for Autonomous Driving Requirements (1/4) Quantity Huge amount of sensor data is necessary to train Neural Networks Resources may be unavailable (e.g. test vehicle, specific sensor set, test drivers ) Current processes are inefficient: Data has to be collected, stored, classified & transferred for labeling Multiple teams/stakeholders are involved Long & expensive cycle time to generate a new data set Only a small percentage of the generated data is relevant for Neural Networks (~80h driving to produce 3min of relevant data) Power of Simulation Define reusable virtual scenarios & new multi-sensor configurations Generate new sensor data sets continuously Automate/optimize processes & focus on relevant data 2


 Specific long & costly test expeditions have to been")

3 Deep Learning for Autonomous Driving Requirements (2/4) Diversity Diversity of the data is the key for a proper training Difficulty to replicate driving scenarios in the real world (e.g. weather conditions, variations in trajectories/positioning of target vehicles ) Specific long & costly test expeditions have to been prepared (e.g. winter/summer testing, day/night driving, multiple test vehicles, highway/country road/city driving) Power of Simulation Create thousands of virtual scenarios through scripting Integrate new environment & road user models on demand 3
 Labeling To train the")



4 Deep Learning for Autonomous Driving Requirements (3/4) Labeling To train the neural network: The data needs to be annotated e.g. object classification, bounding box, image segmentation Expensive & Time consuming to do it manually Ground truth information is missing Power of Simulation Generate labelled sensor data using ground truth information automatically 4




5 Deep Learning for Autonomous Driving Requirements (4/4) Flexibility Different data sets are needed for Training & Validation. Neural Networks should continuously integrate new driving situations. Existing databases may not provide enough quantity and diversity for both Flexibility is reduced to create new data sets Different sources are necessary to validate robustness of Neural Networks Introducing unpredicted objects / environments is the key to further train Neural Networks Power of Simulation Extend Simulation database through scripting and automation Combine Real and Simulated data for more robust Training/Validation Extend Simulation database with new objects and 3D environments 5








6 Safety Ratings Virtual Performance Solution Crash & Safety Occupant Safety Virtual Systems & Controls Euro NCAP / ANCAP Rating
7 Generating Synthetic Data for Neural Networks ESI Pro-SiVIC : Overview 7




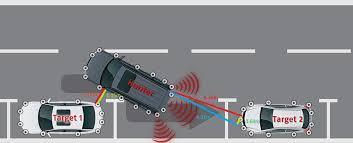

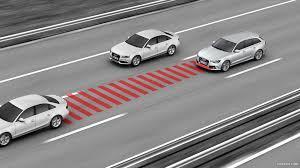


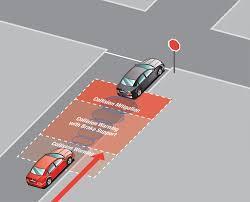






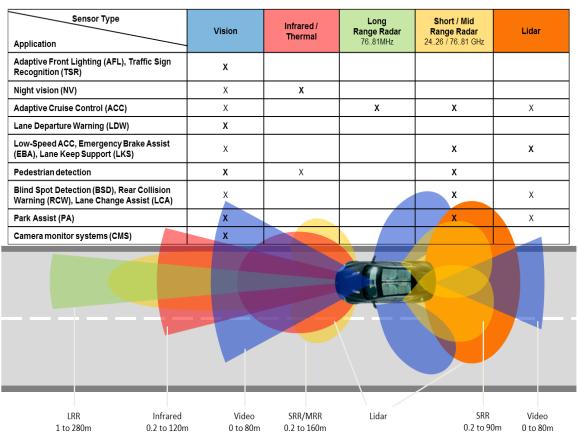


8 Introduction to Pro-SiVIC A platform solution for modeling and simulating multi-frequency environments & multi-technology sensors ACC AEB LDW BSD FCW/RCW IPA CTA LCA Sensors Environment Drivers Applications 8






9 ESI Pro-SiVIC : Overview Realistic Environment Models DB Road environment simulation Highway, country road, urban area Customized marking Different road signs Road users simulation Cars, trucks Pedestrians, bicyclists Traffic Dynamics Generation Parameters Management 9





10 ESI Pro-SiVIC : Overview Physical Sensors Models / Customization Cameras Physical behavior Radar Radar & Targets characteristics Lidar, Ultrasonic, GPS Ground Truth Data Scenario Scripting Testing Automation 10
11 Training and Validation of Neural Networks using Camera Sensor Data New process including introduction of Simulation 11

 HD videos (>FullHD) TB of stored data The rest of the raw images is sent as input to previously trained")
12 Training and Validation of Neural Networks using camera sensor data Current Process Camera videos are recorded from real test campaigns Videos are sequenced and annotated to create useable database with scenario characteristics Raw & annotated images are used to train Deep Learning algorithms (e.g. lane detection) HD videos (>FullHD) TB of stored data The rest of the raw images is sent as input to previously trained algorithms Output of trained algorithms is finally compared to annotated images for validation Manual intervention required for processing 12
13 Training and Validation of Neural Networks using camera sensor data Step 1: Introduction of Simulation to Replace Real Driving Camera videos are recorded from real test campaigns Videos are sequenced and annotated to create useable database with scenario characteristics 3D Models of scenes of high quality replace real driving environments ESI Pro-SiVIC TM Libraries Create Virtual scenarios with custom characteristics, and capture high quality simulated videos In ESI Pro-SiVIC TM Raw & annotated images are used to train Deep Learning algorithms (e.g. lane detection) The rest of the raw images is sent as input to previously trained algorithms Output of trained algorithms is finally compared to annotated images for validation 13

14 Training and Validation of Neural Networks using camera sensor data Step 2: Introduction of Simulation to Replace Physical Camera Camera videos are recorded from real test campaigns Videos are sequenced and annotated to create useable database with scenario characteristics Raw & annotated images are used to train Deep Learning algorithms (e.g. lane detection) The rest of the raw images is sent as input to previously trained algorithms Output of trained algorithms is finally compared to annotated images for validation 3D Models of scenes of high quality replace real driving environments ESI Pro-SiVIC TM Libraries Create Virtual scenarios with custom characteristics, and capture high quality simulated videos In ESI Pro-SiVIC TM Simulated camera model is used rather than physical camera to create raw & segmented images In ESI Pro-SiVIC TM DL algorithms are trained on a dedicated platform using one subset of the simulated images (could be completed by real data) On Linux machine Trained DL algorithms run on NVIDIA PX2 and receive the other subset of the simulated data through cosimulation interface for validation purposes (could be completed by real data) On NVIDIA PX2 14 DL- Deep Learning
15 Training & Validating Neural Network Using Synthetic Camera Images Concept & Application example 15


16 Part1: Training Neural Network Using Synthetic Camera Images Process Synthetic Images Generation Automatically Labeled One Color/Category Cars, Motorcycles, Roads, Lane Markings ~ 5000 images to validate concept Highway & City Environments Cars & Motorcycles Color Variations Images captured at different positions in the scene using multiple sensors Fit Images in Random to avoid overfitting 16


17 Part1: Training Neural Network Using Synthetic Camera Images Results Tested on Synthetic and Real World Data Road & Car detected on both Concept Validated Object Detection could be refined Next steps: More Image Quantity More Image Diversity Various Image Sources New Objects Tradeoff Resolution vs Speed 17





18 Part2: Validating Neural Network Using Synthetic Camera Images Process: Using Synthetic Data to Validate Algorithm Pro-SiVIC NVIDIA PX2 BOARD Camera Sensor Video Stream DDS Interface Ethernet Link DDS Interface Camera Sensor Video Stream Lane Detection Algorithm Camera Sensor Vidéo Stream & Lane Détection Superposed 18

19 Part2: Validating Neural Network Using Synthetic Camera Images Results 19
20 Conclusion The Simulation is opening new perspectives to enhance AI for Autonomous Driving: Optimize Current Algorithm Training and Validation Processes faster & cheaper, earlier validation, better accessibility Introduce more flexibility in generating training and validation data higher fidelity of Neural Networks Generate Multi-Sensor data automatically with Ground Truth Information higher data quality, reduced lead time Use Automation to extend databases higher test/scenario coverage, increased data sources, improved parallel processing 20

21 Thank you! R o h i t R a m a n n a B u s i n e s s D e v e l o p m e n t M a n a g e r, S m a r t V i r t u a l P r o t o t y p i n g E S I N o r t h A m e r i c a Ema i l : r o h i t. r a m a n n e s i - g r o u p. c o m 21
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving. Frank Schuster, Dr. Martin Haueis
 Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Realtime Object Detection and Segmentation for HD Mapping
 Realtime Object Detection and Segmentation for HD Mapping William Raveane Lead AI Engineer Bahram Yoosefizonooz Technical Director NavInfo Europe Advanced Research Lab Presented at GTC Europe 2018 AI in
Realtime Object Detection and Segmentation for HD Mapping William Raveane Lead AI Engineer Bahram Yoosefizonooz Technical Director NavInfo Europe Advanced Research Lab Presented at GTC Europe 2018 AI in
AUTOMATED GENERATION OF VIRTUAL DRIVING SCENARIOS FROM TEST DRIVE DATA
 F2014-ACD-014 AUTOMATED GENERATION OF VIRTUAL DRIVING SCENARIOS FROM TEST DRIVE DATA 1 Roy Bours (*), 1 Martijn Tideman, 2 Ulrich Lages, 2 Roman Katz, 2 Martin Spencer 1 TASS International, Rijswijk, The
F2014-ACD-014 AUTOMATED GENERATION OF VIRTUAL DRIVING SCENARIOS FROM TEST DRIVE DATA 1 Roy Bours (*), 1 Martijn Tideman, 2 Ulrich Lages, 2 Roman Katz, 2 Martin Spencer 1 TASS International, Rijswijk, The
Cloud-based Large Scale Video Analysis
 Cloud-based Large Scale Video Analysis Marcos Nieto Principal Researcher Vicomtech-IK4 Joachim Kreikemeier Manager V-Drive Valeo Schalter und Sensoren GmbH INDEX 1. Cloud-LSVA project 2. ADAS validation
Cloud-based Large Scale Video Analysis Marcos Nieto Principal Researcher Vicomtech-IK4 Joachim Kreikemeier Manager V-Drive Valeo Schalter und Sensoren GmbH INDEX 1. Cloud-LSVA project 2. ADAS validation
DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE. Dennis Lui August 2017
 DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE Dennis Lui August 2017 THE RISE OF GPU COMPUTING APPLICATIONS 10 7 10 6 GPU-Computing perf 1.5X per year 1000X by 2025 ALGORITHMS 10 5 1.1X
DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE Dennis Lui August 2017 THE RISE OF GPU COMPUTING APPLICATIONS 10 7 10 6 GPU-Computing perf 1.5X per year 1000X by 2025 ALGORITHMS 10 5 1.1X
Solid State LiDAR for Ubiquitous 3D Sensing
 April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded
April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded
Towards Fully-automated Driving. tue-mps.org. Challenges and Potential Solutions. Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Giancarlo Vasta, Magneti Marelli, Lucia Lo Bello, University of Catania,
 An innovative traffic management scheme for deterministic/eventbased communications in automotive applications with a focus on Automated Driving Applications Giancarlo Vasta, Magneti Marelli, giancarlo.vasta@magnetimarelli.com
An innovative traffic management scheme for deterministic/eventbased communications in automotive applications with a focus on Automated Driving Applications Giancarlo Vasta, Magneti Marelli, giancarlo.vasta@magnetimarelli.com
Advanced Driver Assistance: Modular Image Sensor Concept
 Vision Advanced Driver Assistance: Modular Image Sensor Concept Supplying value. Integrated Passive and Active Safety Systems Active Safety Passive Safety Scope Reduction of accident probability Get ready
Vision Advanced Driver Assistance: Modular Image Sensor Concept Supplying value. Integrated Passive and Active Safety Systems Active Safety Passive Safety Scope Reduction of accident probability Get ready
S7348: Deep Learning in Ford's Autonomous Vehicles. Bryan Goodman Argo AI 9 May 2017
 S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
IMPROVING ADAS VALIDATION WITH MBT
 Sophia Antipolis, French Riviera 20-22 October 2015 IMPROVING ADAS VALIDATION WITH MBT Presented by Laurent RAFFAELLI ALL4TEC laurent.raffaelli@all4tec.net AGENDA What is an ADAS? ADAS Validation Implementation
Sophia Antipolis, French Riviera 20-22 October 2015 IMPROVING ADAS VALIDATION WITH MBT Presented by Laurent RAFFAELLI ALL4TEC laurent.raffaelli@all4tec.net AGENDA What is an ADAS? ADAS Validation Implementation
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
VISION FOR AUTOMOTIVE DRIVING
 VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
Autonomous Driving Solutions
 Autonomous Driving Solutions Oct, 2017 DrivePX2 & DriveWorks Marcus Oh (moh@nvidia.com) Sr. Solution Architect, NVIDIA This work is licensed under a Creative Commons Attribution-Share Alike 4.0 (CC BY-SA
Autonomous Driving Solutions Oct, 2017 DrivePX2 & DriveWorks Marcus Oh (moh@nvidia.com) Sr. Solution Architect, NVIDIA This work is licensed under a Creative Commons Attribution-Share Alike 4.0 (CC BY-SA
Can We Improve Autonomous Driving With IoT and Cloud?
 Data Center Modernization Title Slide Can We Improve Autonomous Driving With IoT and Cloud?! Subtitle! Name! Title, Department! Date Subrata Kundu, Ph.D. Senior Researcher & Team Leader R&D Division, Hitachi
Data Center Modernization Title Slide Can We Improve Autonomous Driving With IoT and Cloud?! Subtitle! Name! Title, Department! Date Subrata Kundu, Ph.D. Senior Researcher & Team Leader R&D Division, Hitachi
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder
Automated Driving Development
 Automated Driving Development with MATLAB and Simulink MANOHAR REDDY M 2015 The MathWorks, Inc. 1 Using Model-Based Design to develop high quality and reliable Active Safety & Automated Driving Systems
Automated Driving Development with MATLAB and Simulink MANOHAR REDDY M 2015 The MathWorks, Inc. 1 Using Model-Based Design to develop high quality and reliable Active Safety & Automated Driving Systems
SEMI-AUTOMATED ANNOTATION
 VIDEO ANONYMIZATION VIA SEMI-AUTOMATED ANNOTATION SIS77 Automated vehicle data sharing enabled by Feature Extraction and Anonymization Marcos Nieto - Vicomtech 1 OUTLINE Vicomtech Privacy Masking Semi-Automated
VIDEO ANONYMIZATION VIA SEMI-AUTOMATED ANNOTATION SIS77 Automated vehicle data sharing enabled by Feature Extraction and Anonymization Marcos Nieto - Vicomtech 1 OUTLINE Vicomtech Privacy Masking Semi-Automated
OPEN SIMULATION INTERFACE. INTRODUCTION AND OVERVIEW.
 OPEN SIMULATION INTERFACE. INTRODUCTION AND OVERVIEW. DIFFERENTIATION OF SIMULATION DATA INTERFACES. Odometry / Dynamics Interface Open Interface (OSI) Map Interface Dynamics Model Map Model Vehicle Dynamics
OPEN SIMULATION INTERFACE. INTRODUCTION AND OVERVIEW. DIFFERENTIATION OF SIMULATION DATA INTERFACES. Odometry / Dynamics Interface Open Interface (OSI) Map Interface Dynamics Model Map Model Vehicle Dynamics
A New Approach To Robust Non-Intrusive Traffic Detection at Intersections!
 A New Approach To Robust Non-Intrusive Traffic Detection at Intersections! Chad Stelzig Algorithm Engineering, ISS! cstelzig@imagesensing.com! May 22 nd, 2013! Todayʼs Discussion Points! Background and
A New Approach To Robust Non-Intrusive Traffic Detection at Intersections! Chad Stelzig Algorithm Engineering, ISS! cstelzig@imagesensing.com! May 22 nd, 2013! Todayʼs Discussion Points! Background and
Korea ICT Market Overview. Yoonmi Kim Finpro Korea
 Korea ICT Market Overview Yoonmi Kim Finpro Korea 5G Advanced Network Key Players Network Service Provider Electronics Company Car and Car Component Company - 5G Antenna Technoloies for Mobile device and
Korea ICT Market Overview Yoonmi Kim Finpro Korea 5G Advanced Network Key Players Network Service Provider Electronics Company Car and Car Component Company - 5G Antenna Technoloies for Mobile device and
Why the Self-Driving Revolution Hinges on one Enabling Technology: LiDAR
 Why the Self-Driving Revolution Hinges on one Enabling Technology: LiDAR Markus Prison Director Business Development Europe Quanergy ID: 23328 Who We Are The leader in LiDAR (laser-based 3D spatial sensor)
Why the Self-Driving Revolution Hinges on one Enabling Technology: LiDAR Markus Prison Director Business Development Europe Quanergy ID: 23328 Who We Are The leader in LiDAR (laser-based 3D spatial sensor)
TorontoCity: Seeing the World with a Million Eyes
 TorontoCity: Seeing the World with a Million Eyes Authors Shenlong Wang, Min Bai, Gellert Mattyus, Hang Chu, Wenjie Luo, Bin Yang Justin Liang, Joel Cheverie, Sanja Fidler, Raquel Urtasun * Project Completed
TorontoCity: Seeing the World with a Million Eyes Authors Shenlong Wang, Min Bai, Gellert Mattyus, Hang Chu, Wenjie Luo, Bin Yang Justin Liang, Joel Cheverie, Sanja Fidler, Raquel Urtasun * Project Completed
Collaborative Mapping with Streetlevel Images in the Wild. Yubin Kuang Co-founder and Computer Vision Lead
 Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
MIOVISION DEEP LEARNING TRAFFIC ANALYTICS SYSTEM FOR REAL-WORLD DEPLOYMENT. Kurtis McBride CEO, Miovision
 MIOVISION DEEP LEARNING TRAFFIC ANALYTICS SYSTEM FOR REAL-WORLD DEPLOYMENT Kurtis McBride CEO, Miovision ABOUT MIOVISION COMPANY Founded in 2005 40% growth, year over year Offices in Kitchener, Canada
MIOVISION DEEP LEARNING TRAFFIC ANALYTICS SYSTEM FOR REAL-WORLD DEPLOYMENT Kurtis McBride CEO, Miovision ABOUT MIOVISION COMPANY Founded in 2005 40% growth, year over year Offices in Kitchener, Canada
Transforming Transport Infrastructure with GPU- Accelerated Machine Learning Yang Lu and Shaun Howell
 Transforming Transport Infrastructure with GPU- Accelerated Machine Learning Yang Lu and Shaun Howell 11 th Oct 2018 2 Contents Our Vision Of Smarter Transport Company introduction and journey so far Advanced
Transforming Transport Infrastructure with GPU- Accelerated Machine Learning Yang Lu and Shaun Howell 11 th Oct 2018 2 Contents Our Vision Of Smarter Transport Company introduction and journey so far Advanced
Applying AI to Mapping
 Applying AI to Mapping Dr. Ryan Wolcott Manager, Simultaneous Localization and Mapping (SLAM) 1 TRI: Who We Are Our mission is to improve the quality of human life through advances in artificial intelligence,
Applying AI to Mapping Dr. Ryan Wolcott Manager, Simultaneous Localization and Mapping (SLAM) 1 TRI: Who We Are Our mission is to improve the quality of human life through advances in artificial intelligence,
Evaluation of a laser-based reference system for ADAS
 23 rd ITS World Congress, Melbourne, Australia, 10 14 October 2016 Paper number ITS- EU-TP0045 Evaluation of a laser-based reference system for ADAS N. Steinhardt 1*, S. Kaufmann 2, S. Rebhan 1, U. Lages
23 rd ITS World Congress, Melbourne, Australia, 10 14 October 2016 Paper number ITS- EU-TP0045 Evaluation of a laser-based reference system for ADAS N. Steinhardt 1*, S. Kaufmann 2, S. Rebhan 1, U. Lages
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet.
 Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
A NEW COMPUTING ERA. Shanker Trivedi Senior Vice President Enterprise Business at NVIDIA
 A NEW COMPUTING ERA Shanker Trivedi Senior Vice President Enterprise Business at NVIDIA THE ERA OF AI AI CLOUD MOBILE PC 2 TWO FORCES DRIVING THE FUTURE OF COMPUTING 10 7 Transistors (thousands) 10 5 1.1X
A NEW COMPUTING ERA Shanker Trivedi Senior Vice President Enterprise Business at NVIDIA THE ERA OF AI AI CLOUD MOBILE PC 2 TWO FORCES DRIVING THE FUTURE OF COMPUTING 10 7 Transistors (thousands) 10 5 1.1X
Detection and Classification of Vehicles
 Detection and Classification of Vehicles Gupte et al. 2002 Zeeshan Mohammad ECG 782 Dr. Brendan Morris. Introduction Previously, magnetic loop detectors were used to count vehicles passing over them. Advantages
Detection and Classification of Vehicles Gupte et al. 2002 Zeeshan Mohammad ECG 782 Dr. Brendan Morris. Introduction Previously, magnetic loop detectors were used to count vehicles passing over them. Advantages
Vision based autonomous driving - A survey of recent methods. -Tejus Gupta
 Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
LPR and Traffic Analytics cameras installation guide. Technical Manual
 LPR and Traffic Analytics cameras installation guide Technical Manual p. 2 of 19 Purpose This document is addressed to clients and installers, and its purpose is to explain the hardware and installation
LPR and Traffic Analytics cameras installation guide Technical Manual p. 2 of 19 Purpose This document is addressed to clients and installers, and its purpose is to explain the hardware and installation
A. SERVEL. EuCNC Special Sessions 5G connected car 01/07/2015
 A. SERVEL EuCNC 2015 - Special Sessions 5G connected car 01/07/2015 Connected cars, a reality since 12 years for our customers! 2003 A Pioneer for emergency 1.6 million of equipped vehicles 2006 One of
A. SERVEL EuCNC 2015 - Special Sessions 5G connected car 01/07/2015 Connected cars, a reality since 12 years for our customers! 2003 A Pioneer for emergency 1.6 million of equipped vehicles 2006 One of
What s inside: What is deep learning Why is deep learning taking off now? Multiple applications How to implement a system.
 Point Grey White Paper Series What s inside: What is deep learning Why is deep learning taking off now? Multiple applications How to implement a system More and more, machine vision systems are expected
Point Grey White Paper Series What s inside: What is deep learning Why is deep learning taking off now? Multiple applications How to implement a system More and more, machine vision systems are expected
Designing a software framework for automated driving. Dr.-Ing. Sebastian Ohl, 2017 October 12 th
 Designing a software framework for automated driving Dr.-Ing. Sebastian Ohl, 2017 October 12 th Challenges Functional software architecture with open interfaces and a set of well-defined software components
Designing a software framework for automated driving Dr.-Ing. Sebastian Ohl, 2017 October 12 th Challenges Functional software architecture with open interfaces and a set of well-defined software components
Automatic Incident Detection Solutions UK & Ireland Partner
 1 Automatic Incident Detection Solutions UK & Ireland Partner Sprinx AID Solutions ver. 2.4.0 - SVS Automatic Incident Detection 3 Sprinx SX-TRAFFIC system allows reliable detection of incidents and events
1 Automatic Incident Detection Solutions UK & Ireland Partner Sprinx AID Solutions ver. 2.4.0 - SVS Automatic Incident Detection 3 Sprinx SX-TRAFFIC system allows reliable detection of incidents and events
MATLAB Expo 2014 Verkehrszeichenerkennung in Fahrerassistenzsystemen Continental
 Senses for Safety. Driver assistance systems help save lives. MATLAB Expo 2014 Verkehrszeichenerkennung in Fahrerassistenzsystemen MATLAB @ Continental http://www.continental-automotive.com/ Chassis &
Senses for Safety. Driver assistance systems help save lives. MATLAB Expo 2014 Verkehrszeichenerkennung in Fahrerassistenzsystemen MATLAB @ Continental http://www.continental-automotive.com/ Chassis &
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Team Aware Perception System using Stereo Vision and Radar
 Team Aware Perception System using Stereo Vision and Radar System Development Review 03/ 08 / 2017 Amit Agarwal Harry Golash Yihao Qian Menghan Zhang Zihao (Theo) Zhang Project Description Develop a standalone
Team Aware Perception System using Stereo Vision and Radar System Development Review 03/ 08 / 2017 Amit Agarwal Harry Golash Yihao Qian Menghan Zhang Zihao (Theo) Zhang Project Description Develop a standalone
Automotive LiDAR. General Motors R&D. Ariel Lipson
 Automotive LiDAR General Motors R&D Ariel Lipson Overview How LiDARs work (Automotive) State of play current devices, costs Alternative technologies / approaches and future outlook Advantages of LiDAR-enabled
Automotive LiDAR General Motors R&D Ariel Lipson Overview How LiDARs work (Automotive) State of play current devices, costs Alternative technologies / approaches and future outlook Advantages of LiDAR-enabled
Sensor networks. Ericsson
 Sensor networks IoT @ Ericsson NETWORKS Media IT Industries Page 2 Ericsson at a glance Organization & employees CEO Börje Ekholm Technology & Emerging Business Finance & Common Functions Marketing & Communications
Sensor networks IoT @ Ericsson NETWORKS Media IT Industries Page 2 Ericsson at a glance Organization & employees CEO Börje Ekholm Technology & Emerging Business Finance & Common Functions Marketing & Communications
Dan Galves, Sr VP Communications, Mobileye. January 17, 2018
 Dan Galves, Sr VP Communications, Mobileye January 17, 2018 Risk Factors This presentation occurs during Intel s Quiet Period, before Intel announces its financial and operating results for the fourth
Dan Galves, Sr VP Communications, Mobileye January 17, 2018 Risk Factors This presentation occurs during Intel s Quiet Period, before Intel announces its financial and operating results for the fourth
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation
 Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
Future Implications for the Vehicle When Considering the Internet of Things (IoT)
") Future Implications for the Vehicle When Considering the Internet of Things (IoT) FTF-AUT-F0082 Richard Soja Automotive MCU Systems Engineer A P R. 2 0 1 4 TM External Use Agenda Overview of Existing Automotive
Future Implications for the Vehicle When Considering the Internet of Things (IoT) FTF-AUT-F0082 Richard Soja Automotive MCU Systems Engineer A P R. 2 0 1 4 TM External Use Agenda Overview of Existing Automotive
Automated Driving System Toolbox 소개
 1 Automated Driving System Toolbox 소개 이제훈차장 2017 The MathWorks, Inc. 2 Common Questions from Automated Driving Engineers 1011010101010100101001 0101010100100001010101 0010101001010100101010 0101010100101010101001
1 Automated Driving System Toolbox 소개 이제훈차장 2017 The MathWorks, Inc. 2 Common Questions from Automated Driving Engineers 1011010101010100101001 0101010100100001010101 0010101001010100101010 0101010100101010101001
Creating Affordable and Reliable Autonomous Vehicle Systems
 Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
To realize Connected Vehicle Society. Yosuke NISHIMURO Ministry of Internal Affairs and Communications (MIC), Japan
, Japan") To realize Connected Vehicle Society Yosuke NISHIMURO Ministry of Internal Affairs and Communications (MIC), Japan Services provided by Connected Vehicle 1 Vehicle 5G V2X Connected Vehicle Big Data AI
To realize Connected Vehicle Society Yosuke NISHIMURO Ministry of Internal Affairs and Communications (MIC), Japan Services provided by Connected Vehicle 1 Vehicle 5G V2X Connected Vehicle Big Data AI
Connected Car. Dr. Sania Irwin. Head of Systems & Applications May 27, Nokia Solutions and Networks 2014 For internal use
 Connected Car Dr. Sania Irwin Head of Systems & Applications May 27, 2015 1 Nokia Solutions and Networks 2014 For internal use Agenda Introduction Industry Landscape Industry Architecture & Implications
Connected Car Dr. Sania Irwin Head of Systems & Applications May 27, 2015 1 Nokia Solutions and Networks 2014 For internal use Agenda Introduction Industry Landscape Industry Architecture & Implications
Trimble Positioning for Automotive Applications
 Trimble Positioning for Automotive Applications Trimble at a Glance Core Markets Agriculture Construction Building Construction Geospatial Transportation Emerging Markets Automotive Rail A MARKET LEADER
Trimble Positioning for Automotive Applications Trimble at a Glance Core Markets Agriculture Construction Building Construction Geospatial Transportation Emerging Markets Automotive Rail A MARKET LEADER
Towards Autonomous Vehicle. What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors
 7 May 2017 Disclaimer Towards Autonomous Vehicle What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors Why Vision Sensors? Humans use both eyes as main sense
7 May 2017 Disclaimer Towards Autonomous Vehicle What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors Why Vision Sensors? Humans use both eyes as main sense
Understanding the Potential for Video Analytics to Support Traffic Management Functions
 Understanding the Potential for Video Analytics to Support Traffic Management Functions Project Summary Slides November 2014 ENTERPRISE Program Program Goals Facilitate rapid progress in the development
Understanding the Potential for Video Analytics to Support Traffic Management Functions Project Summary Slides November 2014 ENTERPRISE Program Program Goals Facilitate rapid progress in the development
Cooperative Vehicles Opportunity and Challenges
 Cooperative Vehicles Opportunity and Challenges State Smart Transportation Initiative Toyota Motor Engineering & Manufacturing North America (TEMA) Toyota Technical Center (TTC) Hideki Hada 4/24/2012 Presentation
Cooperative Vehicles Opportunity and Challenges State Smart Transportation Initiative Toyota Motor Engineering & Manufacturing North America (TEMA) Toyota Technical Center (TTC) Hideki Hada 4/24/2012 Presentation
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018
 Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
VIA Mobile360 Surround View
 VIA Mobile360 Surround View VIA Mobile360 Surround View delivers real-time in-vehicle 360 video monitoring and recording to provide the most effective solution for driver monitoring, safety and vehicle
VIA Mobile360 Surround View VIA Mobile360 Surround View delivers real-time in-vehicle 360 video monitoring and recording to provide the most effective solution for driver monitoring, safety and vehicle
Seamless Tool Chain for Testing Camera-based Advanced Driver Assistance Systems
 DEVELOPMENT Driver Assistance Systems IPG Automotive Seamless Tool Chain for Testing Camera-based Advanced Driver Assistance Systems AUTHORS Dipl.-Wirt.-Ing. Raphael Pfeffer is Product Manager Test Systems
DEVELOPMENT Driver Assistance Systems IPG Automotive Seamless Tool Chain for Testing Camera-based Advanced Driver Assistance Systems AUTHORS Dipl.-Wirt.-Ing. Raphael Pfeffer is Product Manager Test Systems
Matt Ronning Automotive sub-group Chairman. MIPI Alliance Extends Interface Standards to Support Automotive Market
 Matt Ronning Automotive sub-group Chairman MIPI Alliance Extends Interface Standards to Support Automotive Market Automotive sub-group (AsG) AsGFormed Jan. 31, 17 AsG Reports to MSG, dotted line to TSG
Matt Ronning Automotive sub-group Chairman MIPI Alliance Extends Interface Standards to Support Automotive Market Automotive sub-group (AsG) AsGFormed Jan. 31, 17 AsG Reports to MSG, dotted line to TSG
rfpro & DS Products: Integrated development software for human and autonomously driven vehicles
 rfpro & DS Products: Integrated development software for human and autonomously driven vehicles rfpro & DS Products: Integrated development software for human andautonomously driven vehicles rfpro The
rfpro & DS Products: Integrated development software for human and autonomously driven vehicles rfpro & DS Products: Integrated development software for human andautonomously driven vehicles rfpro The
LOW COST ADVANCDED DRIVER ASSISTANCE SYSTEM (ADAS) DEVELOPMENT
 DEVELOPMENT") 2013 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM AUTONOMOUS GROUND SYSTEMS (AGS) MINI-SYMPOSIUM AUGUST 21-22, 2013 - TROY, MICHIGAN LOW COST ADVANCDED DRIVER ASSISTANCE SYSTEM (ADAS)
2013 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM AUTONOMOUS GROUND SYSTEMS (AGS) MINI-SYMPOSIUM AUGUST 21-22, 2013 - TROY, MICHIGAN LOW COST ADVANCDED DRIVER ASSISTANCE SYSTEM (ADAS)
Option Driver Assistance. Product Information
 Product Information Table of Contents 1 Overview... 3 1.1 Introduction... 3 1.2 Features and Advantages... 3 1.3 Application Areas... 4 1.4 Further Information... 5 2 Functions... 5 3 Creating the Configuration
Product Information Table of Contents 1 Overview... 3 1.1 Introduction... 3 1.2 Features and Advantages... 3 1.3 Application Areas... 4 1.4 Further Information... 5 2 Functions... 5 3 Creating the Configuration
Laserscanner Based Cooperative Pre-Data-Fusion
 Laserscanner Based Cooperative Pre-Data-Fusion 63 Laserscanner Based Cooperative Pre-Data-Fusion F. Ahlers, Ch. Stimming, Ibeo Automobile Sensor GmbH Abstract The Cooperative Pre-Data-Fusion is a novel
Laserscanner Based Cooperative Pre-Data-Fusion 63 Laserscanner Based Cooperative Pre-Data-Fusion F. Ahlers, Ch. Stimming, Ibeo Automobile Sensor GmbH Abstract The Cooperative Pre-Data-Fusion is a novel
Vehicle Detection Using Android Smartphones
 University of Iowa Iowa Research Online Driving Assessment Conference 2013 Driving Assessment Conference Jun 19th, 12:00 AM Vehicle Detection Using Android Smartphones Zhiquan Ren Shanghai Jiao Tong University,
University of Iowa Iowa Research Online Driving Assessment Conference 2013 Driving Assessment Conference Jun 19th, 12:00 AM Vehicle Detection Using Android Smartphones Zhiquan Ren Shanghai Jiao Tong University,
Communication Patterns in Safety Critical Systems for ADAS & Autonomous Vehicles Thorsten Wilmer Tech AD Berlin, 5. March 2018
 Communication Patterns in Safety Critical Systems for ADAS & Autonomous Vehicles Thorsten Wilmer Tech AD Berlin, 5. March 2018 Agenda Motivation Introduction of Safety Components Introduction to ARMv8
Communication Patterns in Safety Critical Systems for ADAS & Autonomous Vehicles Thorsten Wilmer Tech AD Berlin, 5. March 2018 Agenda Motivation Introduction of Safety Components Introduction to ARMv8
Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving assistance applications on smart mobile devices
 Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
NVIDIA AI BRAIN OF SELF DRIVING AND HD MAPPING. September 13, 2016
 NVIDIA AI BRAIN OF SELF DRIVING AND HD MAPPING September 13, 2016 AI FOR AUTONOMOUS DRIVING MAPPING KALDI LOCALIZATION DRIVENET Training on DGX-1 NVIDIA DGX-1 NVIDIA DRIVE PX 2 Driving with DriveWorks
NVIDIA AI BRAIN OF SELF DRIVING AND HD MAPPING September 13, 2016 AI FOR AUTONOMOUS DRIVING MAPPING KALDI LOCALIZATION DRIVENET Training on DGX-1 NVIDIA DGX-1 NVIDIA DRIVE PX 2 Driving with DriveWorks
Functional Safety Architectural Challenges for Autonomous Drive
 Functional Safety Architectural Challenges for Autonomous Drive Ritesh Tyagi: August 2018 Topics Market Forces Functional Safety Overview Deeper Look Fail-Safe vs Fail-Operational Architectural Considerations
Functional Safety Architectural Challenges for Autonomous Drive Ritesh Tyagi: August 2018 Topics Market Forces Functional Safety Overview Deeper Look Fail-Safe vs Fail-Operational Architectural Considerations
Intel and Mobileye Autonomous Driving Solutions
 Product Brief Autonomous Driving Intel and Mobileye Autonomous Driving Solutions Together, Mobileye and Intel deliver scalable and versatile solutions using purpose-built software and efficient, powerful
Product Brief Autonomous Driving Intel and Mobileye Autonomous Driving Solutions Together, Mobileye and Intel deliver scalable and versatile solutions using purpose-built software and efficient, powerful
RTMaps Embedded facilitating development and testing of complex HAD software on modern ADAS platforms
 Philippe / 30 min dspace Technology Conference Plymouth, Michigan October 17th 2017 RTMaps Embedded facilitating development and testing of complex HAD software on modern ADAS platforms Nicolas du Lac
Philippe / 30 min dspace Technology Conference Plymouth, Michigan October 17th 2017 RTMaps Embedded facilitating development and testing of complex HAD software on modern ADAS platforms Nicolas du Lac
Mobile Mapping and Navigation. Brad Kohlmeyer NAVTEQ Research
 Mobile Mapping and Navigation Brad Kohlmeyer NAVTEQ Research Mobile Mapping & Navigation Markets Automotive Enterprise Internet & Wireless Mobile Devices 2 Local Knowledge & Presence Used to Create Most
Mobile Mapping and Navigation Brad Kohlmeyer NAVTEQ Research Mobile Mapping & Navigation Markets Automotive Enterprise Internet & Wireless Mobile Devices 2 Local Knowledge & Presence Used to Create Most
Embedded GPGPU and Deep Learning for Industrial Market
 Embedded GPGPU and Deep Learning for Industrial Market Author: Dan Mor GPGPU and HPEC Product Line Manager September 2018 Table of Contents 1. INTRODUCTION... 3 2. DIFFICULTIES IN CURRENT EMBEDDED INDUSTRIAL
Embedded GPGPU and Deep Learning for Industrial Market Author: Dan Mor GPGPU and HPEC Product Line Manager September 2018 Table of Contents 1. INTRODUCTION... 3 2. DIFFICULTIES IN CURRENT EMBEDDED INDUSTRIAL
A Whole New World of Mapping and Sensing: Uses from Asset to Management to In Vehicle Sensing for Collision Avoidance
 A Whole New World of Mapping and Sensing: Uses from Asset to Management to In Vehicle Sensing for Collision Avoidance Charles Toth, Dorota A Grejner-Brzezinska, Carla Bailo and Joanna Pinkerton Satellite
A Whole New World of Mapping and Sensing: Uses from Asset to Management to In Vehicle Sensing for Collision Avoidance Charles Toth, Dorota A Grejner-Brzezinska, Carla Bailo and Joanna Pinkerton Satellite
Pedestrian Detection Using Correlated Lidar and Image Data EECS442 Final Project Fall 2016
 edestrian Detection Using Correlated Lidar and Image Data EECS442 Final roject Fall 2016 Samuel Rohrer University of Michigan rohrer@umich.edu Ian Lin University of Michigan tiannis@umich.edu Abstract
edestrian Detection Using Correlated Lidar and Image Data EECS442 Final roject Fall 2016 Samuel Rohrer University of Michigan rohrer@umich.edu Ian Lin University of Michigan tiannis@umich.edu Abstract
Joint Object Detection and Viewpoint Estimation using CNN features
 Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
CONTENT ENGINEERING & VISION LABORATORY. Régis Vinciguerra
 CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra regis.vinciguerra@cea.fr ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological
CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra regis.vinciguerra@cea.fr ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological
Learning Semantic Video Captioning using Data Generated with Grand Theft Auto
 A dark car is turning left on an exit Learning Semantic Video Captioning using Data Generated with Grand Theft Auto Alex Polis Polichroniadis Data Scientist, MSc Kolia Sadeghi Applied Mathematician, PhD
A dark car is turning left on an exit Learning Semantic Video Captioning using Data Generated with Grand Theft Auto Alex Polis Polichroniadis Data Scientist, MSc Kolia Sadeghi Applied Mathematician, PhD
arxiv: v1 [cs.cv] 30 Oct 2018
![arxiv: v1 [cs.cv] 30 Oct 2018](/thumbs/89/100144469.jpg "arxiv: v1 [cs.cv] 30 Oct 2018") 3D Traffic Simulation for Autonomous Vehicles in Unity and Python arxiv:1810.12552v1 [cs.cv] 30 Oct 2018 Zhijing Jin The University of Hong Kong Pok Fu Lam, Hong Kong zhijing@mit.edu Abstract Over the
3D Traffic Simulation for Autonomous Vehicles in Unity and Python arxiv:1810.12552v1 [cs.cv] 30 Oct 2018 Zhijing Jin The University of Hong Kong Pok Fu Lam, Hong Kong zhijing@mit.edu Abstract Over the
A probabilistic distribution approach for the classification of urban roads in complex environments
 A probabilistic distribution approach for the classification of urban roads in complex environments Giovani Bernardes Vitor 1,2, Alessandro Corrêa Victorino 1, Janito Vaqueiro Ferreira 2 1 Automatique,
A probabilistic distribution approach for the classification of urban roads in complex environments Giovani Bernardes Vitor 1,2, Alessandro Corrêa Victorino 1, Janito Vaqueiro Ferreira 2 1 Automatique,
ADAS: A Safe Eye on The Road
 ADAS: A Safe Eye on The Road FTF-AUT-F0334 Allan McAuslin Product Manager A P R. 2 0 1 4 TM External Use Mobility Innovation Factors Cleaner world Safer World Secure Connectivity Mobility for everyone
ADAS: A Safe Eye on The Road FTF-AUT-F0334 Allan McAuslin Product Manager A P R. 2 0 1 4 TM External Use Mobility Innovation Factors Cleaner world Safer World Secure Connectivity Mobility for everyone
5G Spectrum Access. Wassim Chourbaji. Vice President, Government Affairs and Public Policy EMEA Qualcomm Technologies Inc.
 5G Spectrum Access Wassim Chourbaji Vice President, Government Affairs and Public Policy EMEA Qualcomm Technologies Inc. @WassimChourbaji Pioneering 5G bands for Europe A unifying connectivity fabric Always-available,
5G Spectrum Access Wassim Chourbaji Vice President, Government Affairs and Public Policy EMEA Qualcomm Technologies Inc. @WassimChourbaji Pioneering 5G bands for Europe A unifying connectivity fabric Always-available,
Visual Perception for Autonomous Driving on the NVIDIA DrivePX2 and using SYNTHIA
 Visual Perception for Autonomous Driving on the NVIDIA DrivePX2 and using SYNTHIA Dr. Juan C. Moure Dr. Antonio Espinosa http://grupsderecerca.uab.cat/hpca4se/en/content/gpu http://adas.cvc.uab.es/elektra/
Visual Perception for Autonomous Driving on the NVIDIA DrivePX2 and using SYNTHIA Dr. Juan C. Moure Dr. Antonio Espinosa http://grupsderecerca.uab.cat/hpca4se/en/content/gpu http://adas.cvc.uab.es/elektra/
Effective Monitoring System for Tunnel
 Effective Monitoring System for Tunnel Important Instruction This solution contains three sub-systems, the first is Event Detection system, the second is Traffic Status Analysis system, the last is Section
Effective Monitoring System for Tunnel Important Instruction This solution contains three sub-systems, the first is Event Detection system, the second is Traffic Status Analysis system, the last is Section
IoT in Smart Cities Technology overview and future trends
 IoT in Smart Cities Technology overview and future trends Rolland Vida, PhD Budapest University of Technology and Economics Smart City Group, Dept. of Telecommunications and Media Informatics IEEE Sensors
IoT in Smart Cities Technology overview and future trends Rolland Vida, PhD Budapest University of Technology and Economics Smart City Group, Dept. of Telecommunications and Media Informatics IEEE Sensors
Enabling Smart Lighting for Smart Cities. How Cheen Ng 18 August 2017
 Enabling Smart Lighting for Smart Cities How Cheen Ng 18 August 2017 Infineon at a glance Business Segments Automotive 17% (ATV) 31% 41% 11% Revenue FY 2016 Industrial Power Control (IPC) Power Management
Enabling Smart Lighting for Smart Cities How Cheen Ng 18 August 2017 Infineon at a glance Business Segments Automotive 17% (ATV) 31% 41% 11% Revenue FY 2016 Industrial Power Control (IPC) Power Management
Advanced Driver Assistance Systems: A Cost-Effective Implementation of the Forward Collision Warning Module
 Advanced Driver Assistance Systems: A Cost-Effective Implementation of the Forward Collision Warning Module www.lnttechservices.com Table of Contents Abstract 03 Introduction 03 Solution Overview 03 Output
Advanced Driver Assistance Systems: A Cost-Effective Implementation of the Forward Collision Warning Module www.lnttechservices.com Table of Contents Abstract 03 Introduction 03 Solution Overview 03 Output
Design your autonomous vehicle applications with NVIDIA DriveWorks components on RTMaps
 SAN JOSE MAY 8-11, 2017 Design your autonomous vehicle applications with NVIDIA DriveWorks components on RTMaps Nicolas du Lac CEO, Intempora Brief introduction about Intempora Intempora Software editor
SAN JOSE MAY 8-11, 2017 Design your autonomous vehicle applications with NVIDIA DriveWorks components on RTMaps Nicolas du Lac CEO, Intempora Brief introduction about Intempora Intempora Software editor
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
White Paper: VANTIQ Digital Twin Architecture
 Vantiq White Paper www.vantiq.com White Paper: VANTIQ Digital Twin Architecture By Paul Butterworth November 2017 TABLE OF CONTENTS Introduction... 3 Digital Twins... 3 Definition... 3 Examples... 5 Logical
Vantiq White Paper www.vantiq.com White Paper: VANTIQ Digital Twin Architecture By Paul Butterworth November 2017 TABLE OF CONTENTS Introduction... 3 Digital Twins... 3 Definition... 3 Examples... 5 Logical
Supplier Business Opportunities on ADAS and Autonomous Driving Technologies
 AUTOMOTIVE Supplier Business Opportunities on ADAS and Autonomous Driving Technologies 19 October 2016 Tokyo, Japan Masanori Matsubara, Senior Analyst, +81 3 6262 1734, Masanori.Matsubara@ihsmarkit.com
AUTOMOTIVE Supplier Business Opportunities on ADAS and Autonomous Driving Technologies 19 October 2016 Tokyo, Japan Masanori Matsubara, Senior Analyst, +81 3 6262 1734, Masanori.Matsubara@ihsmarkit.com
Deep Learning Requirements for Autonomous Vehicles
 Deep Learning Requirements for Autonomous Vehicles Pierre Paulin, Director of R&D Synopsys Inc. Chipex, 1 May 2018 1 Agenda Deep Learning and Convolutional Neural Networks for Embedded Vision Automotive
Deep Learning Requirements for Autonomous Vehicles Pierre Paulin, Director of R&D Synopsys Inc. Chipex, 1 May 2018 1 Agenda Deep Learning and Convolutional Neural Networks for Embedded Vision Automotive
Roger C. Lanctot Director, Automotive Connected Mobility
 Roger C. Lanctot Director, Automotive Connected Mobility Roger Lanctot has 25+ years of experience as a journalist, analyst and consultant advising electronics companies, car companies, wireless carriers,
Roger C. Lanctot Director, Automotive Connected Mobility Roger Lanctot has 25+ years of experience as a journalist, analyst and consultant advising electronics companies, car companies, wireless carriers,
High Speed Measurement For ADAS And Fast Analysis
 High Speed Measurement For ADAS And Fast Analysis How to read that much data Measurement and Calibration User Day November 13 th 2018 V1.1 2018-11-09 ADAS Logging ADAS Logging Hardware and Software ADAS
High Speed Measurement For ADAS And Fast Analysis How to read that much data Measurement and Calibration User Day November 13 th 2018 V1.1 2018-11-09 ADAS Logging ADAS Logging Hardware and Software ADAS
ANALYZING AND COMPARING TRAFFIC NETWORK CONDITIONS WITH A QUALITY TOOL BASED ON FLOATING CAR AND STATIONARY DATA
 15th World Congress on Intelligent Transport Systems ITS Connections: Saving Time, Saving Lives New York, November 16-20, 2008 ANALYZING AND COMPARING TRAFFIC NETWORK CONDITIONS WITH A QUALITY TOOL BASED
15th World Congress on Intelligent Transport Systems ITS Connections: Saving Time, Saving Lives New York, November 16-20, 2008 ANALYZING AND COMPARING TRAFFIC NETWORK CONDITIONS WITH A QUALITY TOOL BASED
Regulatory perspective and technical tools and platforms to measure QoS - COUNTRY EXPERIENCES
 Regulatory perspective and technical tools and platforms to measure QoS - COUNTRY EXPERIENCES Adam Siewicz, Ph. D. Chief Expert Department of Monitoring Office of Electronic Communications (UKE) Agenda
Regulatory perspective and technical tools and platforms to measure QoS - COUNTRY EXPERIENCES Adam Siewicz, Ph. D. Chief Expert Department of Monitoring Office of Electronic Communications (UKE) Agenda
Mobile Millennium Using Smartphones as Traffic Sensors
 Mobile Millennium Using Smartphones as Traffic Sensors Dan Work and Alex Bayen Systems Engineering, Civil and Environmental Engineering, UC Berkeley Intelligent Infrastructure, Center for Information Technology
Mobile Millennium Using Smartphones as Traffic Sensors Dan Work and Alex Bayen Systems Engineering, Civil and Environmental Engineering, UC Berkeley Intelligent Infrastructure, Center for Information Technology
SHRP 2 Safety Research Symposium July 27, Site-Based Video System Design and Development: Research Plans and Issues
 SHRP 2 Safety Research Symposium July 27, 2007 Site-Based Video System Design and Development: Research Plans and Issues S09 Objectives Support SHRP2 program research questions: Establish crash surrogates
SHRP 2 Safety Research Symposium July 27, 2007 Site-Based Video System Design and Development: Research Plans and Issues S09 Objectives Support SHRP2 program research questions: Establish crash surrogates
INTELLIGENT TRAFFIC MANAGEMENT FOR INDIA Phil Allen VP Sales APAC
 INTELLIGENT TRAFFIC MANAGEMENT FOR INDIA 2017-05 Phil Allen VP Sales APAC Phil.Allen@tomtom.com OUR BUSINESS TODAY 4,700 employees in 35 countries LICENSING Delivering digital maps and dynamic content
INTELLIGENT TRAFFIC MANAGEMENT FOR INDIA 2017-05 Phil Allen VP Sales APAC Phil.Allen@tomtom.com OUR BUSINESS TODAY 4,700 employees in 35 countries LICENSING Delivering digital maps and dynamic content
Camera Behavior Models for ADAS and AD functions with Open Simulation Interface and Functional Mockup Interface
 Camera Behavior Models for ADAS and AD functions with Open Simulation Interface and Functional Mockup Interface Kmeid Saad Stefan-Alexander Schneider Master s Course of Advanced Driver Assistance Systems,
Camera Behavior Models for ADAS and AD functions with Open Simulation Interface and Functional Mockup Interface Kmeid Saad Stefan-Alexander Schneider Master s Course of Advanced Driver Assistance Systems,
SLiM : Scalable Live Media Streaming Framework for a U-City
 SLiM : Scalable Live Media Streaming Framework for a U-City Eun-Seok Ryu, Chuck Yoo 236, Department of Computer Science and Engineering, Korea University, Anam-Dong, Seongbuk-Gu, Seoul, Korea { esryu,
SLiM : Scalable Live Media Streaming Framework for a U-City Eun-Seok Ryu, Chuck Yoo 236, Department of Computer Science and Engineering, Korea University, Anam-Dong, Seongbuk-Gu, Seoul, Korea { esryu,
Testing of automated driving systems
 TÜV SÜD AG Slide 1 Testing of automated driving systems Ondřej Vaculín TÜV SÜD Czech Outline TÜV SÜD AG 2016/09/21 IPG Apply and Innovate Slide 2 UN ECE Tests for ADAS Testing procedures for automated
TÜV SÜD AG Slide 1 Testing of automated driving systems Ondřej Vaculín TÜV SÜD Czech Outline TÜV SÜD AG 2016/09/21 IPG Apply and Innovate Slide 2 UN ECE Tests for ADAS Testing procedures for automated
Small is the New Big: Data Analytics on the Edge
 Small is the New Big: Data Analytics on the Edge An overview of processors and algorithms for deep learning techniques on the edge Dr. Abhay Samant VP Engineering, Hiller Measurements Adjunct Faculty,
Small is the New Big: Data Analytics on the Edge An overview of processors and algorithms for deep learning techniques on the edge Dr. Abhay Samant VP Engineering, Hiller Measurements Adjunct Faculty,