Local Readjustment for High-Resolution 3D Reconstruction: Supplementary Material
|
|
|
- Rosamond Dawson
- 5 years ago
- Views:
Transcription














1 Local Readjustment for High-Resolution 3D Reconstruction: Supplementary Material Siyu Zhu 1, Tian Fang 2, Jianxiong Xiao 3, and Long Quan 4 1,2,4 The Hong Kong University of Science and Technology 3 Princeton University 1. Introduction Owing to space constraints, the formal paper provides parts of our experimental results. This document presents more results of real datasets without ground truth, real datasets with ground truth, and synthetic datasets to both quantitatively and qualitatively demonstrate that our method significantly reduces severe propagated errors and estimation biases caused by the initial global adjustment, and helps to recover the detailed geometry. 2. Real Datasets without Ground Truth 2.1. The Results of the Casa Milla Dataset Figure 1. Sample images of the Casa Milla dataset. 1









")





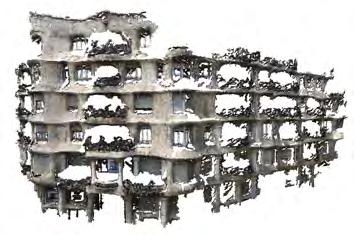
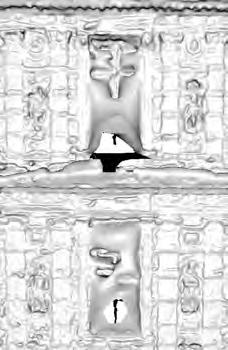
2 Dense Reconstruction Figure 2. The comparison between mesh models with and without readjustment (RA) for the Casa Milla dataset. We should note that some serious artifacts in the dense reconstruction (marked by purple rectangles) are caused by the Non-Lambertian surface and cannot be resolved by our method. Dense Reconstruction Figure 3. The comparison between mesh models with and without readjustment (RA) for the Casa Milla dataset. 2
















3 Dense Reconstruction Figure 4. The comparison between mesh models with and without readjustment (RA) for the Casa Milla dataset. Dense Reconstruction Figure 5. The comparison between mesh models with and without readjustment (RA) for the Casa Milla dataset. 3



















4 2.2. The Results of the Station Dataset Figure 6. Sample images of the Station dataset. Dense Reconstruction Figure 7. The comparison between mesh models with and without readjustment (RA) for the Station dataset. 4












5 Dense Reconstruction Figure 8. The comparison between mesh models with and without readjustment (RA) for the Station dataset. Dense Reconstruction Figure 9. The comparison between mesh models with and without readjustment (RA) for the Station dataset. 5

















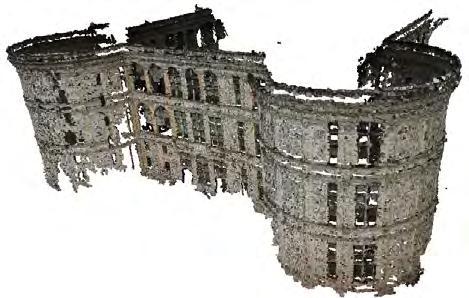
6 2.3. The Results of the Louvre Dataset Figure 10. Sample images of the Louvre dataset. Dense Reconstruction Figure 11. The comparison between mesh models with and without readjustment (RA) for the Louvre dataset. 6






7 Dense Reconstruction Figure 12. The comparison between mesh models with and without readjustment (RA) for the Louvre dataset. 7















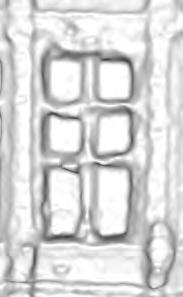


8 2.4. The Results of the Castle Dataset Figure 13. Sample images of the Castle dataset. Dense Reconstruction Figure 14. The comparison between mesh models with and without readjustment (RA) for the Castle dataset. 8


 for the")
9 Dense Reconstruction With RA Wit RA With RA With RA With RA Figure 15. The comparison between mesh models with and without readjustment (RA) for the Castle dataset. 9

![stereo benchmark [1] contains six datasets, namely](/docs-images/89/98742527/images/10-1.jpg "fountain-p11, Herz-Jesu-P8, entry- P10, castle-p19,")








10 3. Real Datasets with Ground Truth 3.1. Histograms and Curves The well-known dense multi-view stereo benchmark [1] contains six datasets, namely fountain-p11, Herz-Jesu-P8, entry- P10, castle-p19, Herz-Jesu-P25, and castle-p30. Because of the lack of space, we have shown the experimental results of the Herz-Jesu-P8, entry-p10, and castle-p19 datasets in our formal paper. Here, the relative error histograms and cumulative relative error curves of the other three datasets are provided. occupancy fountain P11 occupancy Herz Jesu P25 occupancy castle P sigma sigma sigma 1 fountain P11 1 Herz Jesu P25 1 castle P30 cumulative sigma cumulative sigma cumulative sigma Figure 16. Relative error histograms and cumulative relative error curves of the real datasets with ground truth, namely fountain-p11, Herz-Jesu-P25, and castle-p Visual Comparisons Dense Reconstruction Figure 17. The comparison between mesh models with and without readjustment (RA) for the castle-p30 dataset. 10

 for the fountain-p11 dataset.")





11 Dense Reconstruction Figure 18. The comparison between mesh models with and without readjustment (RA) for the Herz-Jesu-P8 dataset. Dense Reconstruction Figure 19. The comparison between mesh models with and without readjustment (RA) for the fountain-p11 dataset. We observe that, compared with the mesh model without readjustment, there is almost no obvious visual improvement in the mesh model with readjustment. It is primarily because these images are all captured in a well-conditioned environment, and the scale of the dataset is comparatively small, meaning it is not the ideal target for our readjustment approach. Fortunately, the images used for reconstruction, especially those for Internet-scale reconstruction, are generally taken under different conditions of lighting, scale, surface reflection, and weather, using various cameras and lens with different focus, sensor noise and distortion, and the estimation bias cannot be ignored. 11
, we use Maya to set synthetic camera poses and get rendered images for dense")

. 4.1.")
 The mesh model used for generating synthetic camera geometry. (b) The synthetic camera geometry.")

12 4. Synthetic Datasets Based on prior textured mesh models, both standard models (Block) and those from the general reconstruction engine (Depot and Tower), we use Maya to set synthetic camera poses and get rendered images for dense reconstruction. In this section, we present some visual comparisons between the synthetic datasets with and without readjustment. Moreover, we provide the average relative error of the dataset with and without readjustment where different types and levels of perturbations are manually introduced (the statistics of the Block dataset is shown in the formal paper) The Results of the Block Dataset (a) (b) (c) Figure 20. The demonstration of the synthetic Block dataset. (a) The mesh model used for generating synthetic camera geometry. (b) The synthetic camera geometry. (c) Some samples of the rendered images for dense reconstruction. (a) (a) (b) (c) Figure 21. The visual comparison of the synthetic Block dataset. Note that we add Gaussian noise to the parameters of two specific cameras, which are marked by red dashed rectangles in (a). (b) and (c) are respectively the mesh models without and with readjustment. We can clearly observe that the mesh model in (c) contains less severe propagated errors. 12
 (c) Figure 22.")








![741 [sigma] Reduction 11.08% 24.13% 3.](/docs-images/89/98742527/images/13-10.jpg "09% 6.79% 28.39% 12.44% 40.63% 41.")

13 4.2. The Results of the Depot Dataset (a) (b) (c) Figure 22. The demonstration of the synthetic Depot dataset. (a) The mesh model used for generating synthetic camera geometry. (b) The synthetic camera geometry. (c) Some samples of the rendered images for dense reconstruction. Dense Reconstruction Figure 23. The comparison between mesh models with and without readjustment (RA) for the synthetic Depot dataset. Error type Uniform error Concentrated error Error level 1 pixel 2 pixels 5 pixels 20 pixels 1 pixel 2 pixels 5 pixels 20 pixels Relative error [sigma] Reduction 11.08% 24.13% 3.09% 6.79% 28.39% 12.44% 40.63% 41.16% Table 1. The average relative error of the synthetic Depot dataset with and without readjustment where different types and levels of perturbations are manually introduced. 13

 The mesh model used for generating synthetic")
 Some samples of the rendered images for dense")






14 4.3. The Results of the Tower Dataset (a) (b) (c) Figure 24. The demonstration of the synthetic Tower dataset. (a) The mesh model used for generating synthetic camera geometry. (b) The synthetic camera geometry. (c) Some samples of the rendered images for dense reconstruction. Dense Reconstruction Figure 25. The comparison between mesh models with and without readjustment (RA) for the synthetic Tower dataset. Error type Uniform error Concentrated error Error level 1 pixel 2 pixels 5 pixels 20 pixels 1 pixel 2 pixels 5 pixels 20 pixels Relative error [sigma] Reduction 8.51% 5.32% 6.38% 3.10% 17.55% 15.79% 35.05% 47.30% Table 2. The average relative error of the synthetic Tower dataset with and without readjustment where different types and levels of perturbations are manually introduced. 14
15 References [1] C. Strecha, W. von Hansen, L. V. Gool, P. Fua, and U. Thoennessen. On benchmarking camera calibration and multi-view stereo for high resolution imagery. In CVPR,
Local Readjustment for High-Resolution 3D Reconstruction
 Local Readjustment for High-Resolution 3D Reconstruction Siyu Zhu, Tian Fang 2, Jianxiong Xiao 3, and Long Quan 4,2,4 The Hong Kong University of Science and Technology 3 Princeton University (a) Readjustment
Local Readjustment for High-Resolution 3D Reconstruction Siyu Zhu, Tian Fang 2, Jianxiong Xiao 3, and Long Quan 4,2,4 The Hong Kong University of Science and Technology 3 Princeton University (a) Readjustment
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/91/106305353.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Multi-View Geometry Compression
 Multi-View Geometry Compression Siyu Zhu, Tian Fang 1, Runze Zhang, Long Quan The Hong Kong University of Science and Technology Abstract. For large-scale and highly redundant photo collections, eliminating
Multi-View Geometry Compression Siyu Zhu, Tian Fang 1, Runze Zhang, Long Quan The Hong Kong University of Science and Technology Abstract. For large-scale and highly redundant photo collections, eliminating
Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects
 Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley Systems White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud Keriven
Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley Systems White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud Keriven
Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects
 www.bentley.com Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud
www.bentley.com Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud
An Efficient Image Matching Method for Multi-View Stereo
 An Efficient Image Matching Method for Multi-View Stereo Shuji Sakai 1, Koichi Ito 1, Takafumi Aoki 1, Tomohito Masuda 2, and Hiroki Unten 2 1 Graduate School of Information Sciences, Tohoku University,
An Efficient Image Matching Method for Multi-View Stereo Shuji Sakai 1, Koichi Ito 1, Takafumi Aoki 1, Tomohito Masuda 2, and Hiroki Unten 2 1 Graduate School of Information Sciences, Tohoku University,
3D reconstruction how accurate can it be?
 Performance Metrics for Correspondence Problems 3D reconstruction how accurate can it be? Pierre Moulon, Foxel CVPR 2015 Workshop Boston, USA (June 11, 2015) We can capture large environments. But for
Performance Metrics for Correspondence Problems 3D reconstruction how accurate can it be? Pierre Moulon, Foxel CVPR 2015 Workshop Boston, USA (June 11, 2015) We can capture large environments. But for
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
The raycloud A Vision Beyond the Point Cloud
 The raycloud A Vision Beyond the Point Cloud Christoph STRECHA, Switzerland Key words: Photogrammetry, Aerial triangulation, Multi-view stereo, 3D vectorisation, Bundle Block Adjustment SUMMARY Measuring
The raycloud A Vision Beyond the Point Cloud Christoph STRECHA, Switzerland Key words: Photogrammetry, Aerial triangulation, Multi-view stereo, 3D vectorisation, Bundle Block Adjustment SUMMARY Measuring
Depth map inpainting under a second-order smoothness prior
 Depth map inpainting under a second-order smoothness prior Daniel Herrera C., Juho Kannala, ubor Ladický, and Janne Heikkilä Center for Machine Vision Research University of Oulu, Finland {dherrera,jkannala,jheikkila}@ee.oulu.fi
Depth map inpainting under a second-order smoothness prior Daniel Herrera C., Juho Kannala, ubor Ladický, and Janne Heikkilä Center for Machine Vision Research University of Oulu, Finland {dherrera,jkannala,jheikkila}@ee.oulu.fi
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Photometric Stereo with Auto-Radiometric Calibration
 Photometric Stereo with Auto-Radiometric Calibration Wiennat Mongkulmann Takahiro Okabe Yoichi Sato Institute of Industrial Science, The University of Tokyo {wiennat,takahiro,ysato} @iis.u-tokyo.ac.jp
Photometric Stereo with Auto-Radiometric Calibration Wiennat Mongkulmann Takahiro Okabe Yoichi Sato Institute of Industrial Science, The University of Tokyo {wiennat,takahiro,ysato} @iis.u-tokyo.ac.jp
Non-Linearly Quantized Moment Shadow Maps
 Non-Linearly Quantized Moment Shadow Maps Christoph Peters 2017-07-30 High-Performance Graphics 2017 These slides include presenter s notes for your convenience. 1 In this presentation we discuss non-linearly
Non-Linearly Quantized Moment Shadow Maps Christoph Peters 2017-07-30 High-Performance Graphics 2017 These slides include presenter s notes for your convenience. 1 In this presentation we discuss non-linearly
Supplementary Material: Comparative Evaluation of Hand-Crafted and Learned Local Features
 Supplementary Material: Comparative Evaluation of Hand-Crafted and Learned Local Features Johannes L. Schönberger 1 Hans Hardmeier 1 Torsten Sattler 1 Marc Pollefeys 1,2 1 Department of Computer Science,
Supplementary Material: Comparative Evaluation of Hand-Crafted and Learned Local Features Johannes L. Schönberger 1 Hans Hardmeier 1 Torsten Sattler 1 Marc Pollefeys 1,2 1 Department of Computer Science,
Color Correction for Image-Based Modeling in the Large
 Color Correction for Image-Based Modeling in the Large Tianwei Shen, Jinglu Wang, Tian Fang, Siyu Zhu, Long Quan Department of Computer Science and Engineering, Hong Kong University of Science and Technology
Color Correction for Image-Based Modeling in the Large Tianwei Shen, Jinglu Wang, Tian Fang, Siyu Zhu, Long Quan Department of Computer Science and Engineering, Hong Kong University of Science and Technology
Image Guided Cost Aggregation for Hierarchical Depth Map Fusion
 Image Guided Cost Aggregation for Hierarchical Depth Map Fusion Thilo Borgmann and Thomas Sikora Communication Systems Group, Technische Universität Berlin {borgmann, sikora}@nue.tu-berlin.de Keywords:
Image Guided Cost Aggregation for Hierarchical Depth Map Fusion Thilo Borgmann and Thomas Sikora Communication Systems Group, Technische Universität Berlin {borgmann, sikora}@nue.tu-berlin.de Keywords:
Deep Models for 3D Reconstruction
 Deep Models for 3D Reconstruction Andreas Geiger Autonomous Vision Group, MPI for Intelligent Systems, Tübingen Computer Vision and Geometry Group, ETH Zürich October 12, 2017 Max Planck Institute for
Deep Models for 3D Reconstruction Andreas Geiger Autonomous Vision Group, MPI for Intelligent Systems, Tübingen Computer Vision and Geometry Group, ETH Zürich October 12, 2017 Max Planck Institute for
Supplementary Material
 Multi-view Reconstruction of Highly Specular Surfaces in Uncontrolled Environments Supplementary Material A Probability distributions Multivariate t-distribution on R 3. A multivariate t-distribution is
Multi-view Reconstruction of Highly Specular Surfaces in Uncontrolled Environments Supplementary Material A Probability distributions Multivariate t-distribution on R 3. A multivariate t-distribution is
Camera-Clustering for Multi-Resolution 3 D Surface Reconstruction
 Camera-Clustering for Multi-Resolution 3 D Surface Reconstruction Andrei Zaharescu 1, Cedric Cagniart 2, Slobodan Ilic 2, Edmond Boyer 1, Radu Horaud 1 1 Jean Kuntzmann Laboratories, Grenoble & INRIA Rhone-Alpes
Camera-Clustering for Multi-Resolution 3 D Surface Reconstruction Andrei Zaharescu 1, Cedric Cagniart 2, Slobodan Ilic 2, Edmond Boyer 1, Radu Horaud 1 1 Jean Kuntzmann Laboratories, Grenoble & INRIA Rhone-Alpes
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
A MULTI-RESOLUTION APPROACH TO DEPTH FIELD ESTIMATION IN DENSE IMAGE ARRAYS F. Battisti, M. Brizzi, M. Carli, A. Neri
 A MULTI-RESOLUTION APPROACH TO DEPTH FIELD ESTIMATION IN DENSE IMAGE ARRAYS F. Battisti, M. Brizzi, M. Carli, A. Neri Università degli Studi Roma TRE, Roma, Italy 2 nd Workshop on Light Fields for Computer
A MULTI-RESOLUTION APPROACH TO DEPTH FIELD ESTIMATION IN DENSE IMAGE ARRAYS F. Battisti, M. Brizzi, M. Carli, A. Neri Università degli Studi Roma TRE, Roma, Italy 2 nd Workshop on Light Fields for Computer
Multi-View Reconstruction Preserving Weakly-Supported Surfaces
 Multi-View Reconstruction Preserving Weakly-Supported Surfaces Michal Jancosek and Tomas Pajdla Center for Machine Perception, Department of Cybernetics Faculty of Elec. Eng., Czech Technical University
Multi-View Reconstruction Preserving Weakly-Supported Surfaces Michal Jancosek and Tomas Pajdla Center for Machine Perception, Department of Cybernetics Faculty of Elec. Eng., Czech Technical University
Subpixel accurate refinement of disparity maps using stereo correspondences
 Subpixel accurate refinement of disparity maps using stereo correspondences Matthias Demant Lehrstuhl für Mustererkennung, Universität Freiburg Outline 1 Introduction and Overview 2 Refining the Cost Volume
Subpixel accurate refinement of disparity maps using stereo correspondences Matthias Demant Lehrstuhl für Mustererkennung, Universität Freiburg Outline 1 Introduction and Overview 2 Refining the Cost Volume
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Using Hierarchical Warp Stereo for Topography. Introduction
 Using Hierarchical Warp Stereo for Topography Dr. Daniel Filiberti ECE/OPTI 531 Image Processing Lab for Remote Sensing Introduction Topography from Stereo Given a set of stereoscopic imagery, two perspective
Using Hierarchical Warp Stereo for Topography Dr. Daniel Filiberti ECE/OPTI 531 Image Processing Lab for Remote Sensing Introduction Topography from Stereo Given a set of stereoscopic imagery, two perspective
Virtual Rephotography: Novel View Prediction Error for 3D Reconstruction
 Supplemental Material for ACM Transactions on Graphics 07 paper Virtual Rephotography: Novel View Prediction Error for 3D Reconstruction Michael Waechter, Mate Beljan, Simon Fuhrmann, Nils Moehrle, Johannes
Supplemental Material for ACM Transactions on Graphics 07 paper Virtual Rephotography: Novel View Prediction Error for 3D Reconstruction Michael Waechter, Mate Beljan, Simon Fuhrmann, Nils Moehrle, Johannes
Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material
 Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material Peak memory usage, GB 10 1 0.1 0.01 OGN Quadratic Dense Cubic Iteration time, s 10
Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material Peak memory usage, GB 10 1 0.1 0.01 OGN Quadratic Dense Cubic Iteration time, s 10
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION
 CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
Depth Range Accuracy for Plenoptic Cameras
 Depth Range Accuracy for Plenoptic Cameras Nuno Barroso Monteiro Institute for Systems and Robotics, University of Lisbon, Portugal Institute for Systems and Robotics, University of Coimbra, Portugal Simão
Depth Range Accuracy for Plenoptic Cameras Nuno Barroso Monteiro Institute for Systems and Robotics, University of Lisbon, Portugal Institute for Systems and Robotics, University of Coimbra, Portugal Simão
From Orientation to Functional Modeling for Terrestrial and UAV Images
 From Orientation to Functional Modeling for Terrestrial and UAV Images Helmut Mayer 1 Andreas Kuhn 1, Mario Michelini 1, William Nguatem 1, Martin Drauschke 2 and Heiko Hirschmüller 2 1 Visual Computing,
From Orientation to Functional Modeling for Terrestrial and UAV Images Helmut Mayer 1 Andreas Kuhn 1, Mario Michelini 1, William Nguatem 1, Martin Drauschke 2 and Heiko Hirschmüller 2 1 Visual Computing,
arxiv: v1 [cs.cv] 17 Jan 2018
![arxiv: v1 [cs.cv] 17 Jan 2018](/thumbs/74/70064966.jpg "arxiv: v1 [cs.cv] 17 Jan 2018") Multi-View Stereo 3D Edge Reconstruction Andrea Bignoli Andrea Romanoni Matteo Matteucci Politecnico di Milano andrea.bignoli@mail.polimi.it andrea.romanoni@polimi.it matteo.matteucci@polimi.it arxiv:1801.05606v1
Multi-View Stereo 3D Edge Reconstruction Andrea Bignoli Andrea Romanoni Matteo Matteucci Politecnico di Milano andrea.bignoli@mail.polimi.it andrea.romanoni@polimi.it matteo.matteucci@polimi.it arxiv:1801.05606v1
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
Evaluating optical flow vectors through collision points of object trajectories in varying computergenerated snow intensities for autonomous vehicles
 Eingebettete Systeme Evaluating optical flow vectors through collision points of object trajectories in varying computergenerated snow intensities for autonomous vehicles 25/6/2018, Vikas Agrawal, Marcel
Eingebettete Systeme Evaluating optical flow vectors through collision points of object trajectories in varying computergenerated snow intensities for autonomous vehicles 25/6/2018, Vikas Agrawal, Marcel
Statistical Angular Error-Based Triangulation for Efficient and Accurate Multi-View Scene Reconstruction
 Statistical Angular Error-Based Triangulation for Efficient and Accurate Multi-View Scene Reconstruction Shawn Recker 1, Mauricio Hess-Flores 2, Kenneth I. Joy 3 University of California, Davis 1 strecker@ucdavis.edu,
Statistical Angular Error-Based Triangulation for Efficient and Accurate Multi-View Scene Reconstruction Shawn Recker 1, Mauricio Hess-Flores 2, Kenneth I. Joy 3 University of California, Davis 1 strecker@ucdavis.edu,
A Global Linear Method for Camera Pose Registration
 2013 IEEE International Conference on Computer Vision A Global Linear Method for Camera Pose Registration Nianjuan Jiang 1, Zhaopeng Cui 2, Ping Tan 2 1 Advanced Digital Sciences Center, Singapore 2 National
2013 IEEE International Conference on Computer Vision A Global Linear Method for Camera Pose Registration Nianjuan Jiang 1, Zhaopeng Cui 2, Ping Tan 2 1 Advanced Digital Sciences Center, Singapore 2 National
Urban Scene Segmentation, Recognition and Remodeling. Part III. Jinglu Wang 11/24/2016 ACCV 2016 TUTORIAL
 Part III Jinglu Wang Urban Scene Segmentation, Recognition and Remodeling 102 Outline Introduction Related work Approaches Conclusion and future work o o - - ) 11/7/16 103 Introduction Motivation Motivation
Part III Jinglu Wang Urban Scene Segmentation, Recognition and Remodeling 102 Outline Introduction Related work Approaches Conclusion and future work o o - - ) 11/7/16 103 Introduction Motivation Motivation
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
A Statistical Consistency Check for the Space Carving Algorithm.
 A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
Visualization of Scene Structure Uncertainty in Multi-View Reconstruction
 Visualization of Scene Structure Uncertainty in Multi-View Reconstruction Shawn Recker, Mauricio Hess-Flores, Mark A. Duchaineau, and Kenneth I. Joy Institute of Data Analysis and Visualization University
Visualization of Scene Structure Uncertainty in Multi-View Reconstruction Shawn Recker, Mauricio Hess-Flores, Mark A. Duchaineau, and Kenneth I. Joy Institute of Data Analysis and Visualization University
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Active Scene Capturing for Image-Based Rendering with a Light Field Setup
 Active Scene Capturing for Image-Based Rendering with a Light Field Setup Cha Zhang and Tsuhan Chen Advanced Multimedia Processing Lab Technical Report AMP 03-02 March 2003 Electrical and Computer Engineering
Active Scene Capturing for Image-Based Rendering with a Light Field Setup Cha Zhang and Tsuhan Chen Advanced Multimedia Processing Lab Technical Report AMP 03-02 March 2003 Electrical and Computer Engineering
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
Chapter 7. Conclusions and Future Work
 Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
Refinement of Surface Mesh for Accurate Multi-View Reconstruction
 THE INTERNATIONAL JOURNAL OF VIRTUAL REALITY, 200, 9():45-54 Refinement of Surface Mesh for Accurate Multi-View Reconstruction Radim Tyleček and Radim Šára Center for Machine Perception, Faculty of Electrical
THE INTERNATIONAL JOURNAL OF VIRTUAL REALITY, 200, 9():45-54 Refinement of Surface Mesh for Accurate Multi-View Reconstruction Radim Tyleček and Radim Šára Center for Machine Perception, Faculty of Electrical
Relative Camera Refinement for Accurate Dense Reconstruction
 Relative Camera Refinement for Accurate Dense Reconstruction Yao Yao Shiwei Li Siyu Zhu Hanyu Deng yyaoag@cse.ust.hk slibc@cse.ust.hk szhu@cse.ust.hk hdeng@cse.ust.hk Tian Fang Long Quan tianft@cse.ust.hk
Relative Camera Refinement for Accurate Dense Reconstruction Yao Yao Shiwei Li Siyu Zhu Hanyu Deng yyaoag@cse.ust.hk slibc@cse.ust.hk szhu@cse.ust.hk hdeng@cse.ust.hk Tian Fang Long Quan tianft@cse.ust.hk
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Keywords:Synthetic Data, IBR, Data Generation Tool. Abstract
 Data Generation Toolkit for Image Based Rendering Algorithms V Vamsi Krishna, P J Narayanan Center for Visual Information Technology International Institute of Information Technology, Hyderabad, India
Data Generation Toolkit for Image Based Rendering Algorithms V Vamsi Krishna, P J Narayanan Center for Visual Information Technology International Institute of Information Technology, Hyderabad, India
Physics-based Vision: an Introduction
 Physics-based Vision: an Introduction Robby Tan ANU/NICTA (Vision Science, Technology and Applications) PhD from The University of Tokyo, 2004 1 What is Physics-based? An approach that is principally concerned
Physics-based Vision: an Introduction Robby Tan ANU/NICTA (Vision Science, Technology and Applications) PhD from The University of Tokyo, 2004 1 What is Physics-based? An approach that is principally concerned
Ping Tan. Simon Fraser University
 Ping Tan Simon Fraser University Photos vs. Videos (live photos) A good photo tells a story Stories are better told in videos Videos in the Mobile Era (mobile & share) More videos are captured by mobile
Ping Tan Simon Fraser University Photos vs. Videos (live photos) A good photo tells a story Stories are better told in videos Videos in the Mobile Era (mobile & share) More videos are captured by mobile
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Surface Normal Aided Dense Reconstruction from Images
 Computer Vision Winter Workshop 26, Ondřej Chum, Vojtěch Franc (eds.) Telč, Czech Republic, February 6 8 Czech Pattern Recognition Society Surface Normal Aided Dense Reconstruction from Images Zoltán Megyesi,
Computer Vision Winter Workshop 26, Ondřej Chum, Vojtěch Franc (eds.) Telč, Czech Republic, February 6 8 Czech Pattern Recognition Society Surface Normal Aided Dense Reconstruction from Images Zoltán Megyesi,
Stacked Denoising Autoencoders for Face Pose Normalization
 Stacked Denoising Autoencoders for Face Pose Normalization Yoonseop Kang 1, Kang-Tae Lee 2,JihyunEun 2, Sung Eun Park 2 and Seungjin Choi 1 1 Department of Computer Science and Engineering Pohang University
Stacked Denoising Autoencoders for Face Pose Normalization Yoonseop Kang 1, Kang-Tae Lee 2,JihyunEun 2, Sung Eun Park 2 and Seungjin Choi 1 1 Department of Computer Science and Engineering Pohang University
Supplementary Material: Piecewise Planar and Compact Floorplan Reconstruction from Images
 Supplementary Material: Piecewise Planar and Compact Floorplan Reconstruction from Images Ricardo Cabral Carnegie Mellon University rscabral@cmu.edu Yasutaka Furukawa Washington University in St. Louis
Supplementary Material: Piecewise Planar and Compact Floorplan Reconstruction from Images Ricardo Cabral Carnegie Mellon University rscabral@cmu.edu Yasutaka Furukawa Washington University in St. Louis
Articulated Pose Estimation with Flexible Mixtures-of-Parts
 Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Intrinsic and Extrinsic Camera Parameter Estimation with Zoomable Camera for Augmented Reality
 Intrinsic and Extrinsic Camera Parameter Estimation with Zoomable Camera for Augmented Reality Kazuya Okada, Takafumi Taketomi, Goshiro Yamamoto, Jun Miyazaki, Hirokazu Kato Nara Institute of Science and
Intrinsic and Extrinsic Camera Parameter Estimation with Zoomable Camera for Augmented Reality Kazuya Okada, Takafumi Taketomi, Goshiro Yamamoto, Jun Miyazaki, Hirokazu Kato Nara Institute of Science and
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Using Self-Contradiction to Learn Confidence Measures in Stereo Vision
 Using Self-Contradiction to Learn Confidence Measures in Stereo Vision Christian Mostegel Markus Rumpler Friedrich Fraundorfer Horst Bischof Institute for Computer Graphics and Vision, Graz University
Using Self-Contradiction to Learn Confidence Measures in Stereo Vision Christian Mostegel Markus Rumpler Friedrich Fraundorfer Horst Bischof Institute for Computer Graphics and Vision, Graz University
Detection and Classification of Holes in Point Clouds
 Detection and Classification of Holes in Point Clouds Nader H. Aldeeb and Olaf Hellwich Computer Vision and Remote Sensing, Technische Universität Berlin, Berlin, Germany nader.h.aldeeb@gmail.com, olaf.hellwich@tu-berlin.de
Detection and Classification of Holes in Point Clouds Nader H. Aldeeb and Olaf Hellwich Computer Vision and Remote Sensing, Technische Universität Berlin, Berlin, Germany nader.h.aldeeb@gmail.com, olaf.hellwich@tu-berlin.de
Shape from Selfies : Human Body Shape Estimation using CCA Regression Forests
 Shape from Selfies : Human Body Shape Estimation using CCA Regression Forests Endri Dibra 1 Cengiz Öztireli1 Remo Ziegler 2 Markus Gross 1 1 Department of Computer Science, ETH Zürich 2 Vizrt {edibra,cengizo,grossm}@inf.ethz.ch
Shape from Selfies : Human Body Shape Estimation using CCA Regression Forests Endri Dibra 1 Cengiz Öztireli1 Remo Ziegler 2 Markus Gross 1 1 Department of Computer Science, ETH Zürich 2 Vizrt {edibra,cengizo,grossm}@inf.ethz.ch
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Image-Based Rendering
 Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Specular Reflection Separation using Dark Channel Prior
 2013 IEEE Conference on Computer Vision and Pattern Recognition Specular Reflection Separation using Dark Channel Prior Hyeongwoo Kim KAIST hyeongwoo.kim@kaist.ac.kr Hailin Jin Adobe Research hljin@adobe.com
2013 IEEE Conference on Computer Vision and Pattern Recognition Specular Reflection Separation using Dark Channel Prior Hyeongwoo Kim KAIST hyeongwoo.kim@kaist.ac.kr Hailin Jin Adobe Research hljin@adobe.com
Adaptive Learning of an Accurate Skin-Color Model
 Adaptive Learning of an Accurate Skin-Color Model Q. Zhu K.T. Cheng C. T. Wu Y. L. Wu Electrical & Computer Engineering University of California, Santa Barbara Presented by: H.T Wang Outline Generic Skin
Adaptive Learning of an Accurate Skin-Color Model Q. Zhu K.T. Cheng C. T. Wu Y. L. Wu Electrical & Computer Engineering University of California, Santa Barbara Presented by: H.T Wang Outline Generic Skin
Learning from 3D Data
 Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Data Acquisition, Leica Scan Station 2, Park Avenue and 70 th Street, NY
 Automated registration of 3D-range with 2D-color images: an overview 44 th Annual Conference on Information Sciences and Systems Invited Session: 3D Data Acquisition and Analysis March 19 th 2010 Ioannis
Automated registration of 3D-range with 2D-color images: an overview 44 th Annual Conference on Information Sciences and Systems Invited Session: 3D Data Acquisition and Analysis March 19 th 2010 Ioannis
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Efficient Large-Scale Stereo Matching
 Efficient Large-Scale Stereo Matching Andreas Geiger*, Martin Roser* and Raquel Urtasun** *KARLSRUHE INSTITUTE OF TECHNOLOGY **TOYOTA TECHNOLOGICAL INSTITUTE AT CHICAGO KIT University of the State of Baden-Wuerttemberg
Efficient Large-Scale Stereo Matching Andreas Geiger*, Martin Roser* and Raquel Urtasun** *KARLSRUHE INSTITUTE OF TECHNOLOGY **TOYOTA TECHNOLOGICAL INSTITUTE AT CHICAGO KIT University of the State of Baden-Wuerttemberg
Analysis and Synthesis of Texture
 Analysis and Synthesis of Texture CMPE 264: Image Analysis and Computer Vision Spring 02, Hai Tao 31/5/02 Extracting image structure by filter banks Q Represent image textures using the responses of a
Analysis and Synthesis of Texture CMPE 264: Image Analysis and Computer Vision Spring 02, Hai Tao 31/5/02 Extracting image structure by filter banks Q Represent image textures using the responses of a
Colored Point Cloud Registration Revisited Supplementary Material
 Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Quasi-Dense Wide Baseline Matching Using Match Propagation
 Quasi-Dense Wide Baseline Matching Using Match Propagation Juho Kannala and Sami S. Brandt Machine Vision Group University of Oulu, Finland {jkannala,sbrandt}@ee.oulu.fi Abstract In this paper we propose
Quasi-Dense Wide Baseline Matching Using Match Propagation Juho Kannala and Sami S. Brandt Machine Vision Group University of Oulu, Finland {jkannala,sbrandt}@ee.oulu.fi Abstract In this paper we propose
Minimizing Noise and Bias in 3D DIC. Correlated Solutions, Inc.
 Minimizing Noise and Bias in 3D DIC Correlated Solutions, Inc. Overview Overview of Noise and Bias Digital Image Correlation Background/Tracking Function Minimizing Noise Focus Contrast/Lighting Glare
Minimizing Noise and Bias in 3D DIC Correlated Solutions, Inc. Overview Overview of Noise and Bias Digital Image Correlation Background/Tracking Function Minimizing Noise Focus Contrast/Lighting Glare
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements
 Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials)
") ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
3D Imaging from Video and Planar Radiography
 3D Imaging from Video and Planar Radiography Julien Pansiot and Edmond Boyer Morpheo, Inria Grenoble Rhône-Alpes, France International Conference on Medical Image Computing and Computer Assisted Intervention
3D Imaging from Video and Planar Radiography Julien Pansiot and Edmond Boyer Morpheo, Inria Grenoble Rhône-Alpes, France International Conference on Medical Image Computing and Computer Assisted Intervention
Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation
 ÖGAI Journal 24/1 11 Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation Michael Bleyer, Margrit Gelautz, Christoph Rhemann Vienna University of Technology
ÖGAI Journal 24/1 11 Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation Michael Bleyer, Margrit Gelautz, Christoph Rhemann Vienna University of Technology
3D Computer Vision. Dense 3D Reconstruction II. Prof. Didier Stricker. Christiano Gava
 3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
DeMoN: Depth and Motion Network for Learning Monocular Stereo Supplementary Material
 Learning rate : Depth and Motion Network for Learning Monocular Stereo Supplementary Material A. Network Architecture Details Our network is a chain of encoder-decoder networks. Figures 15 and 16 explain
Learning rate : Depth and Motion Network for Learning Monocular Stereo Supplementary Material A. Network Architecture Details Our network is a chain of encoder-decoder networks. Figures 15 and 16 explain
3D DEFORMATION MEASUREMENT USING STEREO- CORRELATION APPLIED TO EXPERIMENTAL MECHANICS
 3D DEFORMATION MEASUREMENT USING STEREO- CORRELATION APPLIED TO EXPERIMENTAL MECHANICS Dorian Garcia, Jean-José Orteu École des Mines d Albi, F-81013 ALBI CT Cedex 09, France Dorian.Garcia@enstimac.fr,
3D DEFORMATION MEASUREMENT USING STEREO- CORRELATION APPLIED TO EXPERIMENTAL MECHANICS Dorian Garcia, Jean-José Orteu École des Mines d Albi, F-81013 ALBI CT Cedex 09, France Dorian.Garcia@enstimac.fr,
Swammerdam Institute for Life Sciences (Universiteit van Amsterdam), 1098 XH Amsterdam, The Netherland
, 1098 XH Amsterdam, The Netherland") Sparse deconvolution of high-density super-resolution images (SPIDER) Siewert Hugelier 1, Johan J. de Rooi 2,4, Romain Bernex 1, Sam Duwé 3, Olivier Devos 1, Michel Sliwa 1, Peter Dedecker 3, Paul H. C.
Sparse deconvolution of high-density super-resolution images (SPIDER) Siewert Hugelier 1, Johan J. de Rooi 2,4, Romain Bernex 1, Sam Duwé 3, Olivier Devos 1, Michel Sliwa 1, Peter Dedecker 3, Paul H. C.
PHOG:Photometric and geometric functions for textured shape retrieval. Presentation by Eivind Kvissel
 PHOG:Photometric and geometric functions for textured shape retrieval Presentation by Eivind Kvissel Introduction This paper is about tackling the issue of textured 3D object retrieval. Thanks to advances
PHOG:Photometric and geometric functions for textured shape retrieval Presentation by Eivind Kvissel Introduction This paper is about tackling the issue of textured 3D object retrieval. Thanks to advances
3D Reconstruction from FMV for terrain awareness
 3D Reconstruction from FMV for terrain awareness Fidel Gutiérrez Resendiz AVNTK S.C. Av. Chapalita 1143, Col. Chapalita, C.P. 45040 Guadalajara, Jalisco, México. fidel@avntk.com Copyright 2010 AVNTK S.C.
3D Reconstruction from FMV for terrain awareness Fidel Gutiérrez Resendiz AVNTK S.C. Av. Chapalita 1143, Col. Chapalita, C.P. 45040 Guadalajara, Jalisco, México. fidel@avntk.com Copyright 2010 AVNTK S.C.
A Novel Multi-Planar Homography Constraint Algorithm for Robust Multi-People Location with Severe Occlusion
 A Novel Multi-Planar Homography Constraint Algorithm for Robust Multi-People Location with Severe Occlusion Paper ID:086 Abstract Multi-view approach has been proposed to solve occlusion and lack of visibility
A Novel Multi-Planar Homography Constraint Algorithm for Robust Multi-People Location with Severe Occlusion Paper ID:086 Abstract Multi-view approach has been proposed to solve occlusion and lack of visibility
Capture of Arm-Muscle deformations using a Depth Camera
 Capture of Arm-Muscle deformations using a Depth Camera November 7th, 2013 Nadia Robertini 1, Thomas Neumann 2, Kiran Varanasi 3, Christian Theobalt 4 1 University of Saarland, 2 HTW Dresden, 3 Technicolor
Capture of Arm-Muscle deformations using a Depth Camera November 7th, 2013 Nadia Robertini 1, Thomas Neumann 2, Kiran Varanasi 3, Christian Theobalt 4 1 University of Saarland, 2 HTW Dresden, 3 Technicolor
EECS 4330/7330 Introduction to Mechatronics and Robotic Vision, Fall Lab 1. Camera Calibration
 1 Lab 1 Camera Calibration Objective In this experiment, students will use stereo cameras, an image acquisition program and camera calibration algorithms to achieve the following goals: 1. Develop a procedure
1 Lab 1 Camera Calibration Objective In this experiment, students will use stereo cameras, an image acquisition program and camera calibration algorithms to achieve the following goals: 1. Develop a procedure
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Capture and Dewarping of Page Spreads with a Handheld Compact 3D Camera
 Capture and Dewarping of Page Spreads with a Handheld Compact 3D Camera Michael P. Cutter University of California at Santa Cruz Baskin School of Engineering (Computer Engineering department) Santa Cruz,
Capture and Dewarping of Page Spreads with a Handheld Compact 3D Camera Michael P. Cutter University of California at Santa Cruz Baskin School of Engineering (Computer Engineering department) Santa Cruz,
Error-Diffusion Robust to Mis-Registration in Multi-Pass Printing
 Error-Diffusion Robust to Mis-Registration in Multi-Pass Printing Zhigang Fan, Gaurav Sharma, and Shen-ge Wang Xerox Corporation Webster, New York Abstract Error-diffusion and its variants are commonly
Error-Diffusion Robust to Mis-Registration in Multi-Pass Printing Zhigang Fan, Gaurav Sharma, and Shen-ge Wang Xerox Corporation Webster, New York Abstract Error-diffusion and its variants are commonly
Supplementary Figure 1
 Supplementary Figure 1 Experimental unmodified 2D and astigmatic 3D PSFs. (a) The averaged experimental unmodified 2D PSF used in this study. PSFs at axial positions from -800 nm to 800 nm are shown. The
Supplementary Figure 1 Experimental unmodified 2D and astigmatic 3D PSFs. (a) The averaged experimental unmodified 2D PSF used in this study. PSFs at axial positions from -800 nm to 800 nm are shown. The
3D Computer Vision 1
 3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
A New Image Based Ligthing Method: Practical Shadow-Based Light Reconstruction
 A New Image Based Ligthing Method: Practical Shadow-Based Light Reconstruction Jaemin Lee and Ergun Akleman Visualization Sciences Program Texas A&M University Abstract In this paper we present a practical
A New Image Based Ligthing Method: Practical Shadow-Based Light Reconstruction Jaemin Lee and Ergun Akleman Visualization Sciences Program Texas A&M University Abstract In this paper we present a practical
Improved Sub-pixel Stereo Correspondences through Symmetric Refinement
 Improved Sub-pixel Stereo Correspondences through Symmetric Refinement Diego Nehab Szymon Rusinkiewicz James Davis Princeton University University of California at Santa Cruz Abstract Most dense stereo
Improved Sub-pixel Stereo Correspondences through Symmetric Refinement Diego Nehab Szymon Rusinkiewicz James Davis Princeton University University of California at Santa Cruz Abstract Most dense stereo
Fog Simulation and Refocusing from Stereo Images
 Fog Simulation and Refocusing from Stereo Images Yifei Wang epartment of Electrical Engineering Stanford University yfeiwang@stanford.edu bstract In this project, we use stereo images to estimate depth
Fog Simulation and Refocusing from Stereo Images Yifei Wang epartment of Electrical Engineering Stanford University yfeiwang@stanford.edu bstract In this project, we use stereo images to estimate depth
Hybrid Textons: Modeling Surfaces with Reflectance and Geometry
 Hybrid Textons: Modeling Surfaces with Reflectance and Geometry Jing Wang and Kristin J. Dana Electrical and Computer Engineering Department Rutgers University Piscataway, NJ, USA {jingwang,kdana}@caip.rutgers.edu
Hybrid Textons: Modeling Surfaces with Reflectance and Geometry Jing Wang and Kristin J. Dana Electrical and Computer Engineering Department Rutgers University Piscataway, NJ, USA {jingwang,kdana}@caip.rutgers.edu
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Complex Sensors: Cameras, Visual Sensing. The Robotics Primer (Ch. 9) ECE 497: Introduction to Mobile Robotics -Visual Sensors
 ECE 497: Introduction to Mobile Robotics -Visual Sensors") Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Data Term. Michael Bleyer LVA Stereo Vision
 Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that