SIMULATED ANNEALING WITH AN EFFICIENT UNIVERSAL BARRIER
|
|
|
- Janice McCoy
- 5 years ago
- Views:
Transcription
1 JACOB ABERNETHY UNIVERSITY OF MICHIGAN (JOINT WORK WITH ELAD HAZAN PRINCETON) 1 FASTER CONVEX OPTIMIZATION SIMULATED ANNEALING WITH AN EFFICIENT UNIVERSAL BARRIER
2 2 THIS TALK OUTLINE 1. The goal of Convex Optimization 2. Interior Point Methods and Path following 3. Hit-and-Run and Simulated Annealing 4. The Annealing-IPM Connection 5. Faster Optimization
3 3 GENERAL CONVEX OPTIMIZATION PROBLEM Let K be a bounded convex set, we want to solve min x2k > x Can always convert non-linear objective into a linear one min x2k f(x)! min (x,c)2k R f(x)applec c
4 4 THE GRADIENT DESCENT ALGORITHM The gradient descent algorithm: For t =1, 2,...: x t = x t 1 rf(x t 1 ) x t =Proj K ( x t ) Challenge: the Projection step can often be just as hard as the original optimization

5 5 GRADIENT DESCENT NOT IDEAL WITH LOTS OF CURVATURE The gradient descent algorithm doesn t use any knowledge of the curvature of objective function
6 6 USE THE CURVATURE: NEWTON S METHOD Newton s Method is a smarter version of gradient descent, moves along the gradient after a transformation For t =1, 2,...: x t = x t 1 r 2 f(x t 1 )rf(x t 1 ) x t =Proj K ( x t ) BAD: Need to invert NxN mtx requires possible O(n^2.373 ) GOOD: Typically this step is not required

7 7 NEWTON S METHOD VERSUS GRADIENT DESCENT For a quadratic function, one only needs a single newton step to reach the global minimum For t =1, 2,...: x t = x t 1 r 2 f(x t 1 )rf(x t 1 ) x t =Proj K ( x t )
8 8 WAIT! OUR ORIGINAL OBJECTIVE ISN T CURVED How does this help us with linear optimization? min x2k > x + (x) Add a curved function φ() to the objective! φ() should be super-smooth (more on this later) φ() should be a barrier, i.e. goes to on the boundary, but not too quickly!
9 9 OPTIMIZATION WITHOUT A BARRIER min x2k > x +
10 10 OPTIMIZATION WITH A BARRIER min x2k > x + (x)
11 11 WHAT IS A GOOD BARRIER? What is needed for this barrier func. φ()? Canonical example: if set is a polytope K = {x : Ax b} then the logarithmic barrier suffices: φ(x) = - i log(b i - A i x) In general, Nesterov and Nemirovski proved that the following two conditions are sufficient. Any function satisfying these conditions is a self-concordant barrier: r 3 [h, h, h] apple 2(r 2 [h, h]) 3/2, and r [h] apple p r 2 [h, h], ν is the barrier parameter which will be important later
12 12 ALGORITHM: INTERIOR POINT PATH FOLLOWING METHOD Nesterov and Nemirovski developed the sequential path following method, described as follows: Let =(1+1/ p ) the inflation rate For t=1,2, 1. Update temperature: f k (x) := k ( > x)+ (x) 2. Newton update: ˆx ˆx 1 1+c k r 2 f k (ˆx)rf k (ˆx)
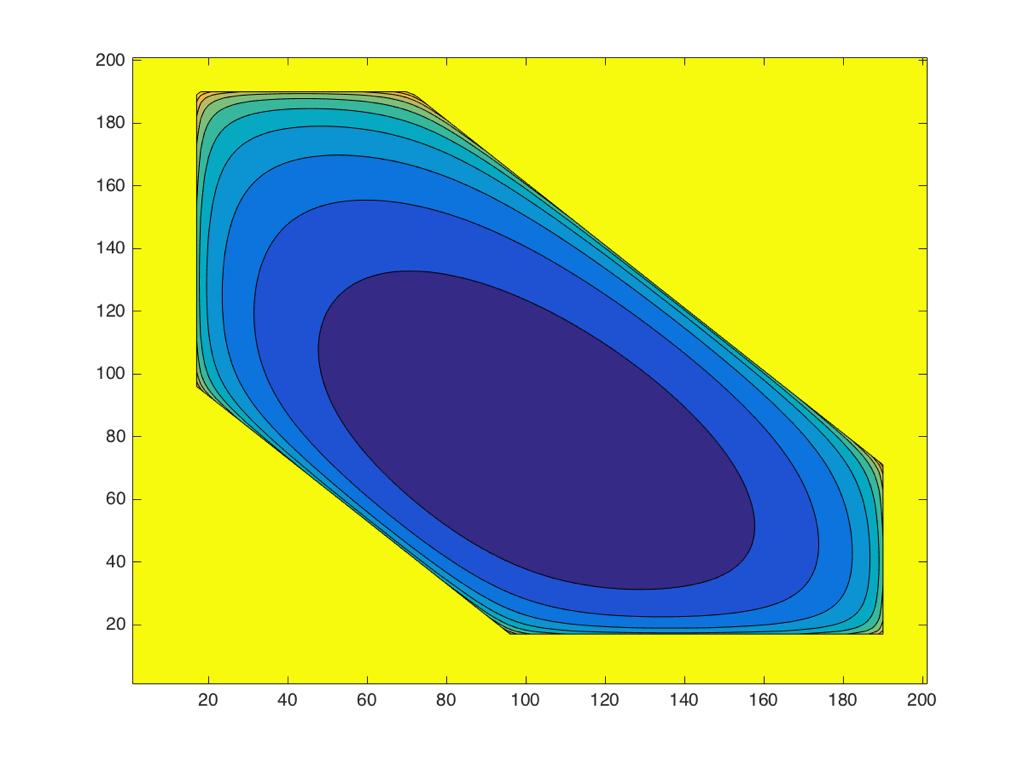
13 13 WHAT DOES THE SEQUENCE OF OBJECTIVES LOOK LIKE? f k (x) := k ( > x)+ (x) Let s show these objective function as we increase k!!
14 14
15 15
16 16
17 17
18 18
19 19
20 20
21 21
22 22 WHY IS THIS CALLED PATH FOLLOWING? ( ) :=argmin x2k ( > x)+ (x) As we increase inflation, the minimizer moves closer to the true desired minimum. We can plot this minimizer as α increases. This is known as the Central Path.
23 23 CONVERGENCE RATE OF PATH FOLLOWING Nesterov and Nemirovski showed: 1. Best inflation rate is k =(1+1/ p ) k 2. Approx error after k iter is = (1+1/ p ) k 3. Hence, to achieve error, need k = O( p log( / )) The barrier parameter ν is pretty important. Nesterov and Nemirovski showed that every set has a self-concordant barrier with barrier parameter ν = O(n)
24 24 THE PROBLEM: EFFICIENT SELF-CONCORDANT BARRIER IN GENERAL? Given any convex set K, how can we construct a selfconcordant barrier for K? Polytopes are easy. So are L2-balls. We have barriers for some other sets also, e.g. the PSD cone. PROBLEM: Find an efficient universal barrier construction? Open problem for some time.
25 25 THIS TALK OUTLINE 1. The goal of Convex Optimization 2. Interior Point Methods and Path following 3. Hit-and-Run and Simulated Annealing 4. The Annealing-IPM Connection 5. Faster Optimization
26 26 SIMULATED ANNEALING FOR OPTIMIZATION From Wikipedia: Optimization of a 1-dimensional function
27 FAST CONVEX OPT-SIMULATED ANNEALING-INTERIOR POINT METHODS 27 INTRODUCTION TO SIMULATED ANNEALING Your goal is to solve the optimization min x2k f(x) Maybe it is easier to sample from the distribution exp( f(x)/t) P t (x) = R K exp( f(x0 )/t)dx 0 for a temperature parameter t
28 28 INTUITION BEHIND SIMULATED ANNEALING HEURISTIC P t (x) = R exp( f(x)/t) K exp( f(x0 )/t)dx 0 Why is sampling easier? And why would it help anyway? First, when t is very large, sampling from P t (θ) is equivalent to sampling from the uniform distribution on K. Easy(ish)! Second, when t is very small, all mass of P t (θ) is concentrated around minimizer of f(x). That s what we want! Third, the successive distributions P t (θ) and P t+1 (θ) are all very close, so we can warm start from previous samples
29 29 HIT-AND-RUN FOR LOG-CONCAVE DISTRIBUTIONS P t (x) = R exp( f(x)/t) K exp( f(x0 )/t)dx 0 Notice that f() convex in x ==> log P t is concave in x Lovasz/Vempala showed that problem of sampling logconcave dists is poly-time using Hit-And-Run random walk. IF you have a warm start (more on this later) Hit-And-Run is an interesting randomization procedure to sample from a convex body, with an interesting history


30 30 WHO INVENTED HIT-AND-RUN?
31 31 HIT-AND-RUN Inputs: distribution P, #iter N, initialx 0 2 K. For i =1, 2,...,N 1. Sample random direction u N(0,I) 2. Compute line segment R = {X i 1 + u : 2 R} \ K 3. Sample X i from P restricted to R Return X N Claim: Hit-And-Run walk has stationary distribution P Question: In what way does K enter into this random walk?
32 32 HIT-AND-RUN

33 BLAH FAST CONVEX OPT-SIMULATED ANNEALING-INTERIOR POINT METHODS 33 HIT-AND-RUN REQUIRES ONLY A MEMBERSHIP ORACLE Notice: a single update of Hit-And-Run required only computing the endpoints of a line segment. Can be accomplished using binary search with a membership oracle
34 POLYTIME SIMULATED ANNEALING CONVERGENCE RESULT Kalai and Vempala (2006) gave a poly-time guarantee for annealing using Hit-and-Run (membership oracle only!) 1. Sample from P k (x) / exp( > x/t k ) 2. Successive dists are close enough if KL(P k+1 (x) P k (x)) apple 1/2 3. The closeness is guaranteed as long as t k (1 1/ p n) k 4. Roughly O( p n log 1/ ) phases needed, O(n 3 ) Hit-and-Run steps needed for mixing, and O(n) samplesneededperphase Total running time is about $O(n^{4.5})$
35
36
37
38
39
40
41
42 THE HEATPATH We can define a path according to the sequence of means one obtains as we turn down the temperature. Let (t) := E [X] X exp( > x/t)/z be the HeatPath.
43 TWO DIFFERENT CONVEX OPTIMIZATION TECHNIQUES Not Really Different Interior Point Methods via Simulated Annealing Path Following via Hit-and-Run
44 THE EQUIVALENCE OF THE CENTRAL PATH AND THE HEAT PATH Key result of A./Hazan 2015: there exists a barrier function φ() such that the CentralPath (for φ()) is identically the HeatPath for the sequence of annealing distributions HeatPath CentralPath These are the same object
45 WHAT IS THE SPECIAL BARRIER? The barrier φ() corresponds to the differential entropy of the exponential family distribution. Equivalently, it s the Fenchel conjugate of the log-partition function. Let A( ) =log R K exp( > x)dx Let A (x) =sup > x A( ) A fact about exponential families: ra( ) =EX P [X] A fact about Fenchel duality: ra( ) =argmax x2k > x A (x) Guler 1996 showed this function is a barrier for cones. Bubeck and Eldan 2015 showed this in general, and gave an optimal parameter bound of n(1 + o(1)).
46 WHAT IS THE BENEFIT OF THIS CONNECTION? Benefit 1: This observation unifies to big areas of literature, and lets you borrow tricks from barrier methods to understand annealing, and vice versa Benefit 2: We were able to get a speedup on annealing using barrier methods, improving Kalai/Vempala s rate of O(n 4.5 ) to O(ν 1/2 n 4 )
47 FIN
Integral Geometry and the Polynomial Hirsch Conjecture
 Integral Geometry and the Polynomial Hirsch Conjecture Jonathan Kelner, MIT Partially based on joint work with Daniel Spielman Introduction n A lot of recent work on Polynomial Hirsch Conjecture has focused
Integral Geometry and the Polynomial Hirsch Conjecture Jonathan Kelner, MIT Partially based on joint work with Daniel Spielman Introduction n A lot of recent work on Polynomial Hirsch Conjecture has focused
Algorithms for convex optimization
 Algorithms for convex optimization Michal Kočvara Institute of Information Theory and Automation Academy of Sciences of the Czech Republic and Czech Technical University kocvara@utia.cas.cz http://www.utia.cas.cz/kocvara
Algorithms for convex optimization Michal Kočvara Institute of Information Theory and Automation Academy of Sciences of the Czech Republic and Czech Technical University kocvara@utia.cas.cz http://www.utia.cas.cz/kocvara
CS 435, 2018 Lecture 9, Date: 3 May 2018 Instructor: Nisheeth Vishnoi. Cutting Plane and Ellipsoid Methods for Linear Programming
 CS 435, 2018 Lecture 9, Date: 3 May 2018 Instructor: Nisheeth Vishnoi Cutting Plane and Ellipsoid Methods for Linear Programming In this lecture we introduce the class of cutting plane methods for convex
CS 435, 2018 Lecture 9, Date: 3 May 2018 Instructor: Nisheeth Vishnoi Cutting Plane and Ellipsoid Methods for Linear Programming In this lecture we introduce the class of cutting plane methods for convex
Lecture 15: Log Barrier Method
 10-725/36-725: Convex Optimization Spring 2015 Lecturer: Ryan Tibshirani Lecture 15: Log Barrier Method Scribes: Pradeep Dasigi, Mohammad Gowayyed Note: LaTeX template courtesy of UC Berkeley EECS dept.
10-725/36-725: Convex Optimization Spring 2015 Lecturer: Ryan Tibshirani Lecture 15: Log Barrier Method Scribes: Pradeep Dasigi, Mohammad Gowayyed Note: LaTeX template courtesy of UC Berkeley EECS dept.
Convex Sets (cont.) Convex Functions
 Convex Functions") Convex Sets (cont.) Convex Functions Optimization - 10725 Carlos Guestrin Carnegie Mellon University February 27 th, 2008 1 Definitions of convex sets Convex v. Non-convex sets Line segment definition:
Convex Sets (cont.) Convex Functions Optimization - 10725 Carlos Guestrin Carnegie Mellon University February 27 th, 2008 1 Definitions of convex sets Convex v. Non-convex sets Line segment definition:
Today. Golden section, discussion of error Newton s method. Newton s method, steepest descent, conjugate gradient
 Optimization Last time Root finding: definition, motivation Algorithms: Bisection, false position, secant, Newton-Raphson Convergence & tradeoffs Example applications of Newton s method Root finding in
Optimization Last time Root finding: definition, motivation Algorithms: Bisection, false position, secant, Newton-Raphson Convergence & tradeoffs Example applications of Newton s method Root finding in
A barrier on convex cones with parameter equal to the dimension
 A barrier on convex cones with parameter equal to the dimension Université Grenoble 1 / CNRS August 23 / ISMP 2012, Berlin Outline 1 Universal barrier 2 Projective images of barriers Pseudo-metric on the
A barrier on convex cones with parameter equal to the dimension Université Grenoble 1 / CNRS August 23 / ISMP 2012, Berlin Outline 1 Universal barrier 2 Projective images of barriers Pseudo-metric on the
CPSC 340: Machine Learning and Data Mining. Robust Regression Fall 2015
 CPSC 340: Machine Learning and Data Mining Robust Regression Fall 2015 Admin Can you see Assignment 1 grades on UBC connect? Auditors, don t worry about it. You should already be working on Assignment
CPSC 340: Machine Learning and Data Mining Robust Regression Fall 2015 Admin Can you see Assignment 1 grades on UBC connect? Auditors, don t worry about it. You should already be working on Assignment
Programming, numerics and optimization
 Programming, numerics and optimization Lecture C-4: Constrained optimization Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428 June
Programming, numerics and optimization Lecture C-4: Constrained optimization Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428 June
CS281 Section 3: Practical Optimization
 CS281 Section 3: Practical Optimization David Duvenaud and Dougal Maclaurin Most parameter estimation problems in machine learning cannot be solved in closed form, so we often have to resort to numerical
CS281 Section 3: Practical Optimization David Duvenaud and Dougal Maclaurin Most parameter estimation problems in machine learning cannot be solved in closed form, so we often have to resort to numerical
Nonlinear Programming
 Nonlinear Programming SECOND EDITION Dimitri P. Bertsekas Massachusetts Institute of Technology WWW site for book Information and Orders http://world.std.com/~athenasc/index.html Athena Scientific, Belmont,
Nonlinear Programming SECOND EDITION Dimitri P. Bertsekas Massachusetts Institute of Technology WWW site for book Information and Orders http://world.std.com/~athenasc/index.html Athena Scientific, Belmont,
Introduction to Optimization
 Introduction to Optimization Second Order Optimization Methods Marc Toussaint U Stuttgart Planned Outline Gradient-based optimization (1st order methods) plain grad., steepest descent, conjugate grad.,
Introduction to Optimization Second Order Optimization Methods Marc Toussaint U Stuttgart Planned Outline Gradient-based optimization (1st order methods) plain grad., steepest descent, conjugate grad.,
Introduction to Optimization Problems and Methods
 Introduction to Optimization Problems and Methods wjch@umich.edu December 10, 2009 Outline 1 Linear Optimization Problem Simplex Method 2 3 Cutting Plane Method 4 Discrete Dynamic Programming Problem Simplex
Introduction to Optimization Problems and Methods wjch@umich.edu December 10, 2009 Outline 1 Linear Optimization Problem Simplex Method 2 3 Cutting Plane Method 4 Discrete Dynamic Programming Problem Simplex
Lower bounds on the barrier parameter of convex cones
 of convex cones Université Grenoble 1 / CNRS June 20, 2012 / High Performance Optimization 2012, Delft Outline Logarithmically homogeneous barriers 1 Logarithmically homogeneous barriers Conic optimization
of convex cones Université Grenoble 1 / CNRS June 20, 2012 / High Performance Optimization 2012, Delft Outline Logarithmically homogeneous barriers 1 Logarithmically homogeneous barriers Conic optimization
Mathematical Programming and Research Methods (Part II)
") Mathematical Programming and Research Methods (Part II) 4. Convexity and Optimization Massimiliano Pontil (based on previous lecture by Andreas Argyriou) 1 Today s Plan Convex sets and functions Types
Mathematical Programming and Research Methods (Part II) 4. Convexity and Optimization Massimiliano Pontil (based on previous lecture by Andreas Argyriou) 1 Today s Plan Convex sets and functions Types
Convex Optimization MLSS 2015
 Convex Optimization MLSS 2015 Constantine Caramanis The University of Texas at Austin The Optimization Problem minimize : f (x) subject to : x X. The Optimization Problem minimize : f (x) subject to :
Convex Optimization MLSS 2015 Constantine Caramanis The University of Texas at Austin The Optimization Problem minimize : f (x) subject to : x X. The Optimization Problem minimize : f (x) subject to :
Solution Methods Numerical Algorithms
 Solution Methods Numerical Algorithms Evelien van der Hurk DTU Managment Engineering Class Exercises From Last Time 2 DTU Management Engineering 42111: Static and Dynamic Optimization (6) 09/10/2017 Class
Solution Methods Numerical Algorithms Evelien van der Hurk DTU Managment Engineering Class Exercises From Last Time 2 DTU Management Engineering 42111: Static and Dynamic Optimization (6) 09/10/2017 Class
Shiqian Ma, MAT-258A: Numerical Optimization 1. Chapter 2. Convex Optimization
 Shiqian Ma, MAT-258A: Numerical Optimization 1 Chapter 2 Convex Optimization Shiqian Ma, MAT-258A: Numerical Optimization 2 2.1. Convex Optimization General optimization problem: min f 0 (x) s.t., f i
Shiqian Ma, MAT-258A: Numerical Optimization 1 Chapter 2 Convex Optimization Shiqian Ma, MAT-258A: Numerical Optimization 2 2.1. Convex Optimization General optimization problem: min f 0 (x) s.t., f i
CS675: Convex and Combinatorial Optimization Spring 2018 Consequences of the Ellipsoid Algorithm. Instructor: Shaddin Dughmi
 CS675: Convex and Combinatorial Optimization Spring 2018 Consequences of the Ellipsoid Algorithm Instructor: Shaddin Dughmi Outline 1 Recapping the Ellipsoid Method 2 Complexity of Convex Optimization
CS675: Convex and Combinatorial Optimization Spring 2018 Consequences of the Ellipsoid Algorithm Instructor: Shaddin Dughmi Outline 1 Recapping the Ellipsoid Method 2 Complexity of Convex Optimization
Constrained and Unconstrained Optimization
 Constrained and Unconstrained Optimization Carlos Hurtado Department of Economics University of Illinois at Urbana-Champaign hrtdmrt2@illinois.edu Oct 10th, 2017 C. Hurtado (UIUC - Economics) Numerical
Constrained and Unconstrained Optimization Carlos Hurtado Department of Economics University of Illinois at Urbana-Champaign hrtdmrt2@illinois.edu Oct 10th, 2017 C. Hurtado (UIUC - Economics) Numerical
1. Introduction. performance of numerical methods. complexity bounds. structural convex optimization. course goals and topics
 1. Introduction EE 546, Univ of Washington, Spring 2016 performance of numerical methods complexity bounds structural convex optimization course goals and topics 1 1 Some course info Welcome to EE 546!
1. Introduction EE 546, Univ of Washington, Spring 2016 performance of numerical methods complexity bounds structural convex optimization course goals and topics 1 1 Some course info Welcome to EE 546!
Aspects of Convex, Nonconvex, and Geometric Optimization (Lecture 1) Suvrit Sra Massachusetts Institute of Technology
 Suvrit Sra Massachusetts Institute of Technology") Aspects of Convex, Nonconvex, and Geometric Optimization (Lecture 1) Suvrit Sra Massachusetts Institute of Technology Hausdorff Institute for Mathematics (HIM) Trimester: Mathematics of Signal Processing
Aspects of Convex, Nonconvex, and Geometric Optimization (Lecture 1) Suvrit Sra Massachusetts Institute of Technology Hausdorff Institute for Mathematics (HIM) Trimester: Mathematics of Signal Processing
Introduction to Convex Optimization. Prof. Daniel P. Palomar
 Introduction to Convex Optimization Prof. Daniel P. Palomar The Hong Kong University of Science and Technology (HKUST) MAFS6010R- Portfolio Optimization with R MSc in Financial Mathematics Fall 2018-19,
Introduction to Convex Optimization Prof. Daniel P. Palomar The Hong Kong University of Science and Technology (HKUST) MAFS6010R- Portfolio Optimization with R MSc in Financial Mathematics Fall 2018-19,
Characterizing Improving Directions Unconstrained Optimization
 Final Review IE417 In the Beginning... In the beginning, Weierstrass's theorem said that a continuous function achieves a minimum on a compact set. Using this, we showed that for a convex set S and y not
Final Review IE417 In the Beginning... In the beginning, Weierstrass's theorem said that a continuous function achieves a minimum on a compact set. Using this, we showed that for a convex set S and y not
Convexization in Markov Chain Monte Carlo
 in Markov Chain Monte Carlo 1 IBM T. J. Watson Yorktown Heights, NY 2 Department of Aerospace Engineering Technion, Israel August 23, 2011 Problem Statement MCMC processes in general are governed by non
in Markov Chain Monte Carlo 1 IBM T. J. Watson Yorktown Heights, NY 2 Department of Aerospace Engineering Technion, Israel August 23, 2011 Problem Statement MCMC processes in general are governed by non
Convex Optimization Lecture 2
 Convex Optimization Lecture 2 Today: Convex Analysis Center-of-mass Algorithm 1 Convex Analysis Convex Sets Definition: A set C R n is convex if for all x, y C and all 0 λ 1, λx + (1 λ)y C Operations that
Convex Optimization Lecture 2 Today: Convex Analysis Center-of-mass Algorithm 1 Convex Analysis Convex Sets Definition: A set C R n is convex if for all x, y C and all 0 λ 1, λx + (1 λ)y C Operations that
Optimization for Machine Learning
 Optimization for Machine Learning (Problems; Algorithms - C) SUVRIT SRA Massachusetts Institute of Technology PKU Summer School on Data Science (July 2017) Course materials http://suvrit.de/teaching.html
Optimization for Machine Learning (Problems; Algorithms - C) SUVRIT SRA Massachusetts Institute of Technology PKU Summer School on Data Science (July 2017) Course materials http://suvrit.de/teaching.html
5 Machine Learning Abstractions and Numerical Optimization
 Machine Learning Abstractions and Numerical Optimization 25 5 Machine Learning Abstractions and Numerical Optimization ML ABSTRACTIONS [some meta comments on machine learning] [When you write a large computer
Machine Learning Abstractions and Numerical Optimization 25 5 Machine Learning Abstractions and Numerical Optimization ML ABSTRACTIONS [some meta comments on machine learning] [When you write a large computer
Lecture 12: Feasible direction methods
 Lecture 12 Lecture 12: Feasible direction methods Kin Cheong Sou December 2, 2013 TMA947 Lecture 12 Lecture 12: Feasible direction methods 1 / 1 Feasible-direction methods, I Intro Consider the problem
Lecture 12 Lecture 12: Feasible direction methods Kin Cheong Sou December 2, 2013 TMA947 Lecture 12 Lecture 12: Feasible direction methods 1 / 1 Feasible-direction methods, I Intro Consider the problem
Lecture 8: The EM algorithm
 10-708: Probabilistic Graphical Models 10-708, Spring 2017 Lecture 8: The EM algorithm Lecturer: Manuela M. Veloso, Eric P. Xing Scribes: Huiting Liu, Yifan Yang 1 Introduction Previous lecture discusses
10-708: Probabilistic Graphical Models 10-708, Spring 2017 Lecture 8: The EM algorithm Lecturer: Manuela M. Veloso, Eric P. Xing Scribes: Huiting Liu, Yifan Yang 1 Introduction Previous lecture discusses
Convex Optimization and Machine Learning
 Convex Optimization and Machine Learning Mengliu Zhao Machine Learning Reading Group School of Computing Science Simon Fraser University March 12, 2014 Mengliu Zhao SFU-MLRG March 12, 2014 1 / 25 Introduction
Convex Optimization and Machine Learning Mengliu Zhao Machine Learning Reading Group School of Computing Science Simon Fraser University March 12, 2014 Mengliu Zhao SFU-MLRG March 12, 2014 1 / 25 Introduction
Convex Optimization. Lijun Zhang Modification of
 Convex Optimization Lijun Zhang zlj@nju.edu.cn http://cs.nju.edu.cn/zlj Modification of http://stanford.edu/~boyd/cvxbook/bv_cvxslides.pdf Outline Introduction Convex Sets & Functions Convex Optimization
Convex Optimization Lijun Zhang zlj@nju.edu.cn http://cs.nju.edu.cn/zlj Modification of http://stanford.edu/~boyd/cvxbook/bv_cvxslides.pdf Outline Introduction Convex Sets & Functions Convex Optimization
Lecture 2 September 3
 EE 381V: Large Scale Optimization Fall 2012 Lecture 2 September 3 Lecturer: Caramanis & Sanghavi Scribe: Hongbo Si, Qiaoyang Ye 2.1 Overview of the last Lecture The focus of the last lecture was to give
EE 381V: Large Scale Optimization Fall 2012 Lecture 2 September 3 Lecturer: Caramanis & Sanghavi Scribe: Hongbo Si, Qiaoyang Ye 2.1 Overview of the last Lecture The focus of the last lecture was to give
Convexity Theory and Gradient Methods
 Convexity Theory and Gradient Methods Angelia Nedić angelia@illinois.edu ISE Department and Coordinated Science Laboratory University of Illinois at Urbana-Champaign Outline Convex Functions Optimality
Convexity Theory and Gradient Methods Angelia Nedić angelia@illinois.edu ISE Department and Coordinated Science Laboratory University of Illinois at Urbana-Champaign Outline Convex Functions Optimality
Introduction to Optimization
 Introduction to Optimization Constrained Optimization Marc Toussaint U Stuttgart Constrained Optimization General constrained optimization problem: Let R n, f : R n R, g : R n R m, h : R n R l find min
Introduction to Optimization Constrained Optimization Marc Toussaint U Stuttgart Constrained Optimization General constrained optimization problem: Let R n, f : R n R, g : R n R m, h : R n R l find min
Ellipsoid Algorithm :Algorithms in the Real World. Ellipsoid Algorithm. Reduction from general case
 Ellipsoid Algorithm 15-853:Algorithms in the Real World Linear and Integer Programming II Ellipsoid algorithm Interior point methods First polynomial-time algorithm for linear programming (Khachian 79)
Ellipsoid Algorithm 15-853:Algorithms in the Real World Linear and Integer Programming II Ellipsoid algorithm Interior point methods First polynomial-time algorithm for linear programming (Khachian 79)
Week 5. Convex Optimization
 Week 5. Convex Optimization Lecturer: Prof. Santosh Vempala Scribe: Xin Wang, Zihao Li Feb. 9 and, 206 Week 5. Convex Optimization. The convex optimization formulation A general optimization problem is
Week 5. Convex Optimization Lecturer: Prof. Santosh Vempala Scribe: Xin Wang, Zihao Li Feb. 9 and, 206 Week 5. Convex Optimization. The convex optimization formulation A general optimization problem is
ISM206 Lecture, April 26, 2005 Optimization of Nonlinear Objectives, with Non-Linear Constraints
 ISM206 Lecture, April 26, 2005 Optimization of Nonlinear Objectives, with Non-Linear Constraints Instructor: Kevin Ross Scribe: Pritam Roy May 0, 2005 Outline of topics for the lecture We will discuss
ISM206 Lecture, April 26, 2005 Optimization of Nonlinear Objectives, with Non-Linear Constraints Instructor: Kevin Ross Scribe: Pritam Roy May 0, 2005 Outline of topics for the lecture We will discuss
Introduction Optimization Geoff Gordon Ryan Tibshirani
 Introduction 10-75 Optimization Geoff Gordon Ryan Tibshirani Administrivia http://www.cs.cmu.edu/~ggordon/1075-f1/ http://groups.google.com/group/1075-f1 Administrivia Prerequisites: no formal ones, but
Introduction 10-75 Optimization Geoff Gordon Ryan Tibshirani Administrivia http://www.cs.cmu.edu/~ggordon/1075-f1/ http://groups.google.com/group/1075-f1 Administrivia Prerequisites: no formal ones, but
Sparse Optimization Lecture: Proximal Operator/Algorithm and Lagrange Dual
 Sparse Optimization Lecture: Proximal Operator/Algorithm and Lagrange Dual Instructor: Wotao Yin July 2013 online discussions on piazza.com Those who complete this lecture will know learn the proximal
Sparse Optimization Lecture: Proximal Operator/Algorithm and Lagrange Dual Instructor: Wotao Yin July 2013 online discussions on piazza.com Those who complete this lecture will know learn the proximal
Analyzing Stochastic Gradient Descent for Some Non- Convex Problems
 Analyzing Stochastic Gradient Descent for Some Non- Convex Problems Christopher De Sa Soon at Cornell University cdesa@stanford.edu stanford.edu/~cdesa Kunle Olukotun Christopher Ré Stanford University
Analyzing Stochastic Gradient Descent for Some Non- Convex Problems Christopher De Sa Soon at Cornell University cdesa@stanford.edu stanford.edu/~cdesa Kunle Olukotun Christopher Ré Stanford University
3 Perceptron Learning; Maximum Margin Classifiers
 Perceptron Learning; Maximum Margin lassifiers Perceptron Learning; Maximum Margin lassifiers Perceptron Algorithm (cont d) Recall: linear decision fn f (x) = w x (for simplicity, no ) decision boundary
Perceptron Learning; Maximum Margin lassifiers Perceptron Learning; Maximum Margin lassifiers Perceptron Algorithm (cont d) Recall: linear decision fn f (x) = w x (for simplicity, no ) decision boundary
Recent Advances in Frank-Wolfe Optimization. Simon Lacoste-Julien
 Recent Advances in Frank-Wolfe Optimization Simon Lacoste-Julien OSL 2017 Les Houches April 13 th, 2017 Outline Frank-Wolfe algorithm review global linear convergence of FW optimization variants condition
Recent Advances in Frank-Wolfe Optimization Simon Lacoste-Julien OSL 2017 Les Houches April 13 th, 2017 Outline Frank-Wolfe algorithm review global linear convergence of FW optimization variants condition
Lecture Notes: Constraint Optimization
 Lecture Notes: Constraint Optimization Gerhard Neumann January 6, 2015 1 Constraint Optimization Problems In constraint optimization we want to maximize a function f(x) under the constraints that g i (x)
Lecture Notes: Constraint Optimization Gerhard Neumann January 6, 2015 1 Constraint Optimization Problems In constraint optimization we want to maximize a function f(x) under the constraints that g i (x)
CS 435, 2018 Lecture 2, Date: 1 March 2018 Instructor: Nisheeth Vishnoi. Convex Programming and Efficiency
 CS 435, 2018 Lecture 2, Date: 1 March 2018 Instructor: Nisheeth Vishnoi Convex Programming and Efficiency In this lecture, we formalize convex programming problem, discuss what it means to solve it efficiently
CS 435, 2018 Lecture 2, Date: 1 March 2018 Instructor: Nisheeth Vishnoi Convex Programming and Efficiency In this lecture, we formalize convex programming problem, discuss what it means to solve it efficiently
Lecture 19: Convex Non-Smooth Optimization. April 2, 2007
 : Convex Non-Smooth Optimization April 2, 2007 Outline Lecture 19 Convex non-smooth problems Examples Subgradients and subdifferentials Subgradient properties Operations with subgradients and subdifferentials
: Convex Non-Smooth Optimization April 2, 2007 Outline Lecture 19 Convex non-smooth problems Examples Subgradients and subdifferentials Subgradient properties Operations with subgradients and subdifferentials
Linear and Integer Programming :Algorithms in the Real World. Related Optimization Problems. How important is optimization?
 Linear and Integer Programming 15-853:Algorithms in the Real World Linear and Integer Programming I Introduction Geometric Interpretation Simplex Method Linear or Integer programming maximize z = c T x
Linear and Integer Programming 15-853:Algorithms in the Real World Linear and Integer Programming I Introduction Geometric Interpretation Simplex Method Linear or Integer programming maximize z = c T x
A Brief Look at Optimization
 A Brief Look at Optimization CSC 412/2506 Tutorial David Madras January 18, 2018 Slides adapted from last year s version Overview Introduction Classes of optimization problems Linear programming Steepest
A Brief Look at Optimization CSC 412/2506 Tutorial David Madras January 18, 2018 Slides adapted from last year s version Overview Introduction Classes of optimization problems Linear programming Steepest
Lecture 4. Convexity Robust cost functions Optimizing non-convex functions. 3B1B Optimization Michaelmas 2017 A. Zisserman
 Lecture 4 3B1B Optimization Michaelmas 2017 A. Zisserman Convexity Robust cost functions Optimizing non-convex functions grid search branch and bound simulated annealing evolutionary optimization The Optimization
Lecture 4 3B1B Optimization Michaelmas 2017 A. Zisserman Convexity Robust cost functions Optimizing non-convex functions grid search branch and bound simulated annealing evolutionary optimization The Optimization
David G. Luenberger Yinyu Ye. Linear and Nonlinear. Programming. Fourth Edition. ö Springer
 David G. Luenberger Yinyu Ye Linear and Nonlinear Programming Fourth Edition ö Springer Contents 1 Introduction 1 1.1 Optimization 1 1.2 Types of Problems 2 1.3 Size of Problems 5 1.4 Iterative Algorithms
David G. Luenberger Yinyu Ye Linear and Nonlinear Programming Fourth Edition ö Springer Contents 1 Introduction 1 1.1 Optimization 1 1.2 Types of Problems 2 1.3 Size of Problems 5 1.4 Iterative Algorithms
Affine function. suppose f : R n R m is affine (f(x) =Ax + b with A R m n, b R m ) the image of a convex set under f is convex
 =Ax + b with A R m n, b R m ) the image of a convex set under f is convex") Affine function suppose f : R n R m is affine (f(x) =Ax + b with A R m n, b R m ) the image of a convex set under f is convex S R n convex = f(s) ={f(x) x S} convex the inverse image f 1 (C) of a convex
Affine function suppose f : R n R m is affine (f(x) =Ax + b with A R m n, b R m ) the image of a convex set under f is convex S R n convex = f(s) ={f(x) x S} convex the inverse image f 1 (C) of a convex
60 2 Convex sets. {x a T x b} {x ã T x b}
 60 2 Convex sets Exercises Definition of convexity 21 Let C R n be a convex set, with x 1,, x k C, and let θ 1,, θ k R satisfy θ i 0, θ 1 + + θ k = 1 Show that θ 1x 1 + + θ k x k C (The definition of convexity
60 2 Convex sets Exercises Definition of convexity 21 Let C R n be a convex set, with x 1,, x k C, and let θ 1,, θ k R satisfy θ i 0, θ 1 + + θ k = 1 Show that θ 1x 1 + + θ k x k C (The definition of convexity
Digital Image Processing Laboratory: MAP Image Restoration
 Purdue University: Digital Image Processing Laboratories 1 Digital Image Processing Laboratory: MAP Image Restoration October, 015 1 Introduction This laboratory explores the use of maximum a posteriori
Purdue University: Digital Image Processing Laboratories 1 Digital Image Processing Laboratory: MAP Image Restoration October, 015 1 Introduction This laboratory explores the use of maximum a posteriori
Math 5593 Linear Programming Lecture Notes
 Math 5593 Linear Programming Lecture Notes Unit II: Theory & Foundations (Convex Analysis) University of Colorado Denver, Fall 2013 Topics 1 Convex Sets 1 1.1 Basic Properties (Luenberger-Ye Appendix B.1).........................
Math 5593 Linear Programming Lecture Notes Unit II: Theory & Foundations (Convex Analysis) University of Colorado Denver, Fall 2013 Topics 1 Convex Sets 1 1.1 Basic Properties (Luenberger-Ye Appendix B.1).........................
CONVEX OPTIMIZATION: A SELECTIVE OVERVIEW
 1! CONVEX OPTIMIZATION: A SELECTIVE OVERVIEW Dimitri Bertsekas! M.I.T.! Taiwan! May 2010! 2! OUTLINE! Convexity issues in optimization! Common geometrical framework for duality and minimax! Unifying framework
1! CONVEX OPTIMIZATION: A SELECTIVE OVERVIEW Dimitri Bertsekas! M.I.T.! Taiwan! May 2010! 2! OUTLINE! Convexity issues in optimization! Common geometrical framework for duality and minimax! Unifying framework
Lecture 12: convergence. Derivative (one variable)
") Lecture 12: convergence More about multivariable calculus Descent methods Backtracking line search More about convexity (first and second order) Newton step Example 1: linear programming (one var., one
Lecture 12: convergence More about multivariable calculus Descent methods Backtracking line search More about convexity (first and second order) Newton step Example 1: linear programming (one var., one
Divide and Conquer Kernel Ridge Regression
 Divide and Conquer Kernel Ridge Regression Yuchen Zhang John Duchi Martin Wainwright University of California, Berkeley COLT 2013 Yuchen Zhang (UC Berkeley) Divide and Conquer KRR COLT 2013 1 / 15 Problem
Divide and Conquer Kernel Ridge Regression Yuchen Zhang John Duchi Martin Wainwright University of California, Berkeley COLT 2013 Yuchen Zhang (UC Berkeley) Divide and Conquer KRR COLT 2013 1 / 15 Problem
Convexity I: Sets and Functions
 Convexity I: Sets and Functions Lecturer: Aarti Singh Co-instructor: Pradeep Ravikumar Convex Optimization 10-725/36-725 See supplements for reviews of basic real analysis basic multivariate calculus basic
Convexity I: Sets and Functions Lecturer: Aarti Singh Co-instructor: Pradeep Ravikumar Convex Optimization 10-725/36-725 See supplements for reviews of basic real analysis basic multivariate calculus basic
Tutorial on Convex Optimization for Engineers
 Tutorial on Convex Optimization for Engineers M.Sc. Jens Steinwandt Communications Research Laboratory Ilmenau University of Technology PO Box 100565 D-98684 Ilmenau, Germany jens.steinwandt@tu-ilmenau.de
Tutorial on Convex Optimization for Engineers M.Sc. Jens Steinwandt Communications Research Laboratory Ilmenau University of Technology PO Box 100565 D-98684 Ilmenau, Germany jens.steinwandt@tu-ilmenau.de
Introduction to Modern Control Systems
 Introduction to Modern Control Systems Convex Optimization, Duality and Linear Matrix Inequalities Kostas Margellos University of Oxford AIMS CDT 2016-17 Introduction to Modern Control Systems November
Introduction to Modern Control Systems Convex Optimization, Duality and Linear Matrix Inequalities Kostas Margellos University of Oxford AIMS CDT 2016-17 Introduction to Modern Control Systems November
Machine Learning for Signal Processing Lecture 4: Optimization
 Machine Learning for Signal Processing Lecture 4: Optimization 13 Sep 2015 Instructor: Bhiksha Raj (slides largely by Najim Dehak, JHU) 11-755/18-797 1 Index 1. The problem of optimization 2. Direct optimization
Machine Learning for Signal Processing Lecture 4: Optimization 13 Sep 2015 Instructor: Bhiksha Raj (slides largely by Najim Dehak, JHU) 11-755/18-797 1 Index 1. The problem of optimization 2. Direct optimization
Delaunay-based Derivative-free Optimization via Global Surrogate. Pooriya Beyhaghi, Daniele Cavaglieri and Thomas Bewley
 Delaunay-based Derivative-free Optimization via Global Surrogate Pooriya Beyhaghi, Daniele Cavaglieri and Thomas Bewley May 23, 2014 Delaunay-based Derivative-free Optimization via Global Surrogate Pooriya
Delaunay-based Derivative-free Optimization via Global Surrogate Pooriya Beyhaghi, Daniele Cavaglieri and Thomas Bewley May 23, 2014 Delaunay-based Derivative-free Optimization via Global Surrogate Pooriya
3 Interior Point Method
 3 Interior Point Method Linear programming (LP) is one of the most useful mathematical techniques. Recent advances in computer technology and algorithms have improved computational speed by several orders
3 Interior Point Method Linear programming (LP) is one of the most useful mathematical techniques. Recent advances in computer technology and algorithms have improved computational speed by several orders
AM 221: Advanced Optimization Spring 2016
 AM 221: Advanced Optimization Spring 2016 Prof. Yaron Singer Lecture 2 Wednesday, January 27th 1 Overview In our previous lecture we discussed several applications of optimization, introduced basic terminology,
AM 221: Advanced Optimization Spring 2016 Prof. Yaron Singer Lecture 2 Wednesday, January 27th 1 Overview In our previous lecture we discussed several applications of optimization, introduced basic terminology,
15. Cutting plane and ellipsoid methods
 EE 546, Univ of Washington, Spring 2012 15. Cutting plane and ellipsoid methods localization methods cutting-plane oracle examples of cutting plane methods ellipsoid method convergence proof inequality
EE 546, Univ of Washington, Spring 2012 15. Cutting plane and ellipsoid methods localization methods cutting-plane oracle examples of cutting plane methods ellipsoid method convergence proof inequality
A Brief Overview of Optimization Problems. Steven G. Johnson MIT course , Fall 2008
 A Brief Overview of Optimization Problems Steven G. Johnson MIT course 18.335, Fall 2008 Why optimization? In some sense, all engineering design is optimization: choosing design parameters to improve some
A Brief Overview of Optimization Problems Steven G. Johnson MIT course 18.335, Fall 2008 Why optimization? In some sense, all engineering design is optimization: choosing design parameters to improve some
Lecture 2: August 31
 10-725/36-725: Convex Optimization Fall 2016 Lecture 2: August 31 Lecturer: Lecturer: Ryan Tibshirani Scribes: Scribes: Lidan Mu, Simon Du, Binxuan Huang 2.1 Review A convex optimization problem is of
10-725/36-725: Convex Optimization Fall 2016 Lecture 2: August 31 Lecturer: Lecturer: Ryan Tibshirani Scribes: Scribes: Lidan Mu, Simon Du, Binxuan Huang 2.1 Review A convex optimization problem is of
Recent Developments in Model-based Derivative-free Optimization
 Recent Developments in Model-based Derivative-free Optimization Seppo Pulkkinen April 23, 2010 Introduction Problem definition The problem we are considering is a nonlinear optimization problem with constraints:
Recent Developments in Model-based Derivative-free Optimization Seppo Pulkkinen April 23, 2010 Introduction Problem definition The problem we are considering is a nonlinear optimization problem with constraints:
Hyperparameter optimization. CS6787 Lecture 6 Fall 2017
 Hyperparameter optimization CS6787 Lecture 6 Fall 2017 Review We ve covered many methods Stochastic gradient descent Step size/learning rate, how long to run Mini-batching Batch size Momentum Momentum
Hyperparameter optimization CS6787 Lecture 6 Fall 2017 Review We ve covered many methods Stochastic gradient descent Step size/learning rate, how long to run Mini-batching Batch size Momentum Momentum
INTRODUCTION TO LINEAR AND NONLINEAR PROGRAMMING
 INTRODUCTION TO LINEAR AND NONLINEAR PROGRAMMING DAVID G. LUENBERGER Stanford University TT ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California London Don Mills, Ontario CONTENTS
INTRODUCTION TO LINEAR AND NONLINEAR PROGRAMMING DAVID G. LUENBERGER Stanford University TT ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California London Don Mills, Ontario CONTENTS
A Brief Overview of Optimization Problems. Steven G. Johnson MIT course , Fall 2008
 A Brief Overview of Optimization Problems Steven G. Johnson MIT course 18.335, Fall 2008 Why optimization? In some sense, all engineering design is optimization: choosing design parameters to improve some
A Brief Overview of Optimization Problems Steven G. Johnson MIT course 18.335, Fall 2008 Why optimization? In some sense, all engineering design is optimization: choosing design parameters to improve some
Walheer Barnabé. Topics in Mathematics Practical Session 2 - Topology & Convex
 Topics in Mathematics Practical Session 2 - Topology & Convex Sets Outline (i) Set membership and set operations (ii) Closed and open balls/sets (iii) Points (iv) Sets (v) Convex Sets Set Membership and
Topics in Mathematics Practical Session 2 - Topology & Convex Sets Outline (i) Set membership and set operations (ii) Closed and open balls/sets (iii) Points (iv) Sets (v) Convex Sets Set Membership and
Convex Optimization. Erick Delage, and Ashutosh Saxena. October 20, (a) (b) (c)
 (b) (c)") Convex Optimization (for CS229) Erick Delage, and Ashutosh Saxena October 20, 2006 1 Convex Sets Definition: A set G R n is convex if every pair of point (x, y) G, the segment beteen x and y is in A. More
Convex Optimization (for CS229) Erick Delage, and Ashutosh Saxena October 20, 2006 1 Convex Sets Definition: A set G R n is convex if every pair of point (x, y) G, the segment beteen x and y is in A. More
CS675: Convex and Combinatorial Optimization Fall 2014 Convex Functions. Instructor: Shaddin Dughmi
 CS675: Convex and Combinatorial Optimization Fall 2014 Convex Functions Instructor: Shaddin Dughmi Outline 1 Convex Functions 2 Examples of Convex and Concave Functions 3 Convexity-Preserving Operations
CS675: Convex and Combinatorial Optimization Fall 2014 Convex Functions Instructor: Shaddin Dughmi Outline 1 Convex Functions 2 Examples of Convex and Concave Functions 3 Convexity-Preserving Operations
Nearest Neighbor with KD Trees
 Case Study 2: Document Retrieval Finding Similar Documents Using Nearest Neighbors Machine Learning/Statistics for Big Data CSE599C1/STAT592, University of Washington Emily Fox January 22 nd, 2013 1 Nearest
Case Study 2: Document Retrieval Finding Similar Documents Using Nearest Neighbors Machine Learning/Statistics for Big Data CSE599C1/STAT592, University of Washington Emily Fox January 22 nd, 2013 1 Nearest
Convex Optimization CMU-10725
 Convex Optimization CMU-10725 Conjugate Direction Methods Barnabás Póczos & Ryan Tibshirani Conjugate Direction Methods 2 Books to Read David G. Luenberger, Yinyu Ye: Linear and Nonlinear Programming Nesterov:
Convex Optimization CMU-10725 Conjugate Direction Methods Barnabás Póczos & Ryan Tibshirani Conjugate Direction Methods 2 Books to Read David G. Luenberger, Yinyu Ye: Linear and Nonlinear Programming Nesterov:
Case Study 1: Estimating Click Probabilities
 Case Study 1: Estimating Click Probabilities SGD cont d AdaGrad Machine Learning for Big Data CSE547/STAT548, University of Washington Sham Kakade March 31, 2015 1 Support/Resources Office Hours Yao Lu:
Case Study 1: Estimating Click Probabilities SGD cont d AdaGrad Machine Learning for Big Data CSE547/STAT548, University of Washington Sham Kakade March 31, 2015 1 Support/Resources Office Hours Yao Lu:
Mathematics of Optimization Viewpoint of Applied Mathematics Logic of Optimization
 Global Focus on Knowledge Lecture (The World of Mathematics #7) 2007 06 07 Mathematics of Optimization Viewpoint of Applied Mathematics Logic of Optimization Kazuo Murota Department. of Mathematical Engineering
Global Focus on Knowledge Lecture (The World of Mathematics #7) 2007 06 07 Mathematics of Optimization Viewpoint of Applied Mathematics Logic of Optimization Kazuo Murota Department. of Mathematical Engineering
Chapter 4 Convex Optimization Problems
 Chapter 4 Convex Optimization Problems Shupeng Gui Computer Science, UR October 16, 2015 hupeng Gui (Computer Science, UR) Convex Optimization Problems October 16, 2015 1 / 58 Outline 1 Optimization problems
Chapter 4 Convex Optimization Problems Shupeng Gui Computer Science, UR October 16, 2015 hupeng Gui (Computer Science, UR) Convex Optimization Problems October 16, 2015 1 / 58 Outline 1 Optimization problems
Nearest Neighbor with KD Trees
 Case Study 2: Document Retrieval Finding Similar Documents Using Nearest Neighbors Machine Learning/Statistics for Big Data CSE599C1/STAT592, University of Washington Emily Fox January 22 nd, 2013 1 Nearest
Case Study 2: Document Retrieval Finding Similar Documents Using Nearest Neighbors Machine Learning/Statistics for Big Data CSE599C1/STAT592, University of Washington Emily Fox January 22 nd, 2013 1 Nearest
Domain Specific Languages for Convex Optimization
 Domain Specific Languages for Convex Optimization Stephen Boyd joint work with E. Chu, J. Mattingley, M. Grant Electrical Engineering Department, Stanford University ROKS 2013, Leuven, 9 July 2013 1 Outline
Domain Specific Languages for Convex Optimization Stephen Boyd joint work with E. Chu, J. Mattingley, M. Grant Electrical Engineering Department, Stanford University ROKS 2013, Leuven, 9 July 2013 1 Outline
Lecture 5: Duality Theory
 Lecture 5: Duality Theory Rajat Mittal IIT Kanpur The objective of this lecture note will be to learn duality theory of linear programming. We are planning to answer following questions. What are hyperplane
Lecture 5: Duality Theory Rajat Mittal IIT Kanpur The objective of this lecture note will be to learn duality theory of linear programming. We are planning to answer following questions. What are hyperplane
Random Tilings. Thomas Fernique. Moscow, Spring 2011
 Random Tilings Thomas Fernique Moscow, Spring 2011 1 Random tilings 2 The Dimer case 3 Random assembly 4 Random sampling 1 Random tilings 2 The Dimer case 3 Random assembly 4 Random sampling Quenching
Random Tilings Thomas Fernique Moscow, Spring 2011 1 Random tilings 2 The Dimer case 3 Random assembly 4 Random sampling 1 Random tilings 2 The Dimer case 3 Random assembly 4 Random sampling Quenching
Generative and discriminative classification techniques
 Generative and discriminative classification techniques Machine Learning and Category Representation 013-014 Jakob Verbeek, December 13+0, 013 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.13.14
Generative and discriminative classification techniques Machine Learning and Category Representation 013-014 Jakob Verbeek, December 13+0, 013 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.13.14
Background for Surface Integration
 Background for urface Integration 1 urface Integrals We have seen in previous work how to define and compute line integrals in R 2. You should remember the basic surface integrals that we will need to
Background for urface Integration 1 urface Integrals We have seen in previous work how to define and compute line integrals in R 2. You should remember the basic surface integrals that we will need to
Gradient Descent - Problem of Hiking Down a Mountain
 Gradient Descent - Problem of Hiking Down a Mountain Udacity Have you ever climbed a mountain? I am sure you had to hike down at some point? Hiking down is a great exercise and it is going to help us understand
Gradient Descent - Problem of Hiking Down a Mountain Udacity Have you ever climbed a mountain? I am sure you had to hike down at some point? Hiking down is a great exercise and it is going to help us understand
Integration. Volume Estimation
 Monte Carlo Integration Lab Objective: Many important integrals cannot be evaluated symbolically because the integrand has no antiderivative. Traditional numerical integration techniques like Newton-Cotes
Monte Carlo Integration Lab Objective: Many important integrals cannot be evaluated symbolically because the integrand has no antiderivative. Traditional numerical integration techniques like Newton-Cotes
/ Approximation Algorithms Lecturer: Michael Dinitz Topic: Linear Programming Date: 2/24/15 Scribe: Runze Tang
 600.469 / 600.669 Approximation Algorithms Lecturer: Michael Dinitz Topic: Linear Programming Date: 2/24/15 Scribe: Runze Tang 9.1 Linear Programming Suppose we are trying to approximate a minimization
600.469 / 600.669 Approximation Algorithms Lecturer: Michael Dinitz Topic: Linear Programming Date: 2/24/15 Scribe: Runze Tang 9.1 Linear Programming Suppose we are trying to approximate a minimization
APPLIED OPTIMIZATION WITH MATLAB PROGRAMMING
 APPLIED OPTIMIZATION WITH MATLAB PROGRAMMING Second Edition P. Venkataraman Rochester Institute of Technology WILEY JOHN WILEY & SONS, INC. CONTENTS PREFACE xiii 1 Introduction 1 1.1. Optimization Fundamentals
APPLIED OPTIMIZATION WITH MATLAB PROGRAMMING Second Edition P. Venkataraman Rochester Institute of Technology WILEY JOHN WILEY & SONS, INC. CONTENTS PREFACE xiii 1 Introduction 1 1.1. Optimization Fundamentals
STEP Support Programme. Assignment 13
 STEP Support Programme Assignment 13 Warm-up You probably already know that for a graph with gradient dy : if dy > 0 then the graph is increasing ; if dy < 0 then the graph is decreasing. The sign of the
STEP Support Programme Assignment 13 Warm-up You probably already know that for a graph with gradient dy : if dy > 0 then the graph is increasing ; if dy < 0 then the graph is decreasing. The sign of the
/633 Introduction to Algorithms Lecturer: Michael Dinitz Topic: Approximation algorithms Date: 11/27/18
 601.433/633 Introduction to Algorithms Lecturer: Michael Dinitz Topic: Approximation algorithms Date: 11/27/18 22.1 Introduction We spent the last two lectures proving that for certain problems, we can
601.433/633 Introduction to Algorithms Lecturer: Michael Dinitz Topic: Approximation algorithms Date: 11/27/18 22.1 Introduction We spent the last two lectures proving that for certain problems, we can
Introduction to optimization methods and line search
 Introduction to optimization methods and line search Jussi Hakanen Post-doctoral researcher jussi.hakanen@jyu.fi How to find optimal solutions? Trial and error widely used in practice, not efficient and
Introduction to optimization methods and line search Jussi Hakanen Post-doctoral researcher jussi.hakanen@jyu.fi How to find optimal solutions? Trial and error widely used in practice, not efficient and
Introduction to Rational Billiards II. Talk by John Smillie. August 21, 2007
 Introduction to Rational Billiards II Talk by John Smillie August 21, 2007 Translation surfaces and their singularities Last time we described the Zemlyakov-Katok construction for billiards on a triangular
Introduction to Rational Billiards II Talk by John Smillie August 21, 2007 Translation surfaces and their singularities Last time we described the Zemlyakov-Katok construction for billiards on a triangular
Theoretical Concepts of Machine Learning
 Theoretical Concepts of Machine Learning Part 2 Institute of Bioinformatics Johannes Kepler University, Linz, Austria Outline 1 Introduction 2 Generalization Error 3 Maximum Likelihood 4 Noise Models 5
Theoretical Concepts of Machine Learning Part 2 Institute of Bioinformatics Johannes Kepler University, Linz, Austria Outline 1 Introduction 2 Generalization Error 3 Maximum Likelihood 4 Noise Models 5
CPSC 340: Machine Learning and Data Mining. Principal Component Analysis Fall 2017
 CPSC 340: Machine Learning and Data Mining Principal Component Analysis Fall 2017 Assignment 3: 2 late days to hand in tonight. Admin Assignment 4: Due Friday of next week. Last Time: MAP Estimation MAP
CPSC 340: Machine Learning and Data Mining Principal Component Analysis Fall 2017 Assignment 3: 2 late days to hand in tonight. Admin Assignment 4: Due Friday of next week. Last Time: MAP Estimation MAP
Lecture 6: Interpolation
 Lecture 6: Interpolation Fatih Guvenen January 10, 2016 Fatih Guvenen ( ) Lecture 6: Interpolation January 10, 2016 1 / 25 General Idea Suppose you are given a grid (x 1, x 2,..., x n ) and the function
Lecture 6: Interpolation Fatih Guvenen January 10, 2016 Fatih Guvenen ( ) Lecture 6: Interpolation January 10, 2016 1 / 25 General Idea Suppose you are given a grid (x 1, x 2,..., x n ) and the function
Module 1 Lecture Notes 2. Optimization Problem and Model Formulation
 Optimization Methods: Introduction and Basic concepts 1 Module 1 Lecture Notes 2 Optimization Problem and Model Formulation Introduction In the previous lecture we studied the evolution of optimization
Optimization Methods: Introduction and Basic concepts 1 Module 1 Lecture Notes 2 Optimization Problem and Model Formulation Introduction In the previous lecture we studied the evolution of optimization
25. NLP algorithms. ˆ Overview. ˆ Local methods. ˆ Constrained optimization. ˆ Global methods. ˆ Black-box methods.
 CS/ECE/ISyE 524 Introduction to Optimization Spring 2017 18 25. NLP algorithms ˆ Overview ˆ Local methods ˆ Constrained optimization ˆ Global methods ˆ Black-box methods ˆ Course wrap-up Laurent Lessard
CS/ECE/ISyE 524 Introduction to Optimization Spring 2017 18 25. NLP algorithms ˆ Overview ˆ Local methods ˆ Constrained optimization ˆ Global methods ˆ Black-box methods ˆ Course wrap-up Laurent Lessard
Convex Optimization M2
 Convex Optimization M2 Lecture 1 A. d Aspremont. Convex Optimization M2. 1/49 Today Convex optimization: introduction Course organization and other gory details... Convex sets, basic definitions. A. d
Convex Optimization M2 Lecture 1 A. d Aspremont. Convex Optimization M2. 1/49 Today Convex optimization: introduction Course organization and other gory details... Convex sets, basic definitions. A. d
Lecture 5: Properties of convex sets
 Lecture 5: Properties of convex sets Rajat Mittal IIT Kanpur This week we will see properties of convex sets. These properties make convex sets special and are the reason why convex optimization problems
Lecture 5: Properties of convex sets Rajat Mittal IIT Kanpur This week we will see properties of convex sets. These properties make convex sets special and are the reason why convex optimization problems