Revisiting 3D Geometric Models for Accurate Object Shape and Pose
|
|
|
- Erik Heath
- 5 years ago
- Views:
Transcription







1 Revisiting 3D Geometric Models for Accurate Object Shape and Pose M. 1 Michael Stark 2,3 Bernt Schiele 3 Konrad Schindler 1 1 Photogrammetry and Remote Sensing Laboratory Swiss Federal Institute of Technology (ETH), Zurich 2 Artificial Intelligence Lab Stanford University, USA 3 Max-Planck-Institute for Informatics Saarbrücken, Germany


2 Current object models: coarse grained estimates 1


3 Our goal: finer-grained models to aid scene-level reasoning 2
4 Revival of 3D geometric representations 1970 [Marr, Nishihara 78] [Brooks 81] [Pentland 86] [Lowe 87] [Koller, Daniilidis, Nagel 93] [Sullivan, Worrall, Ferryman 95] [Haag, Nagel 99]
![Revival of 3D geometric representations 1970 [Marr, Nishihara 78]](/docs-images/90/103495081/images/5-5.jpg "[Brooks 81] [Pentland 86] [Lowe 87] 1980 1990 [Koller, Daniilidis,")
![Nagel 93] [Sullivan, Worrall, Ferryman 95] [Haag, Nagel 99] 2000](/docs-images/90/103495081/images/5-6.jpg "[Hoiem, Efros, Hebert 08] [Ess, Leibe, Schindler, Van Gool 09] [Wang,")
![Gould, Koller 10] [Hedau, Hoiem, Forsyth 10] [Barinova, Lempitsky,](/docs-images/90/103495081/images/5-7.jpg "Tretyak, Kohli 10] [Gupta, Efros, Hebert 10] [Wojek, Roth, Schindler,")
5 Revival of 3D geometric representations 1970 [Marr, Nishihara 78] [Brooks 81] [Pentland 86] [Lowe 87] [Koller, Daniilidis, Nagel 93] [Sullivan, Worrall, Ferryman 95] [Haag, Nagel 99] 2000 [Hoiem, Efros, Hebert 08] [Ess, Leibe, Schindler, Van Gool 09] [Wang, Gould, Koller 10] [Hedau, Hoiem, Forsyth 10] [Barinova, Lempitsky, Tretyak, Kohli 10] [Gupta, Efros, Hebert 10] [Wojek, Roth, Schindler, Schiele 10]
 [Thomas et al.")
![, 06] [Yan, Khan, Shah 07] [Ozuysal, Lepetit, Fua 09] [Nachimson, Basri 09] [Su, Sun, Fei-Fei, Savarese 09] [Gu, Ren](/docs-images/90/103495081/images/6-1.jpg "10] [Stark, Goesele, Schiele 10] 1) 1) 2) Explicit 3D geometry representation [Liebelt, Schmid 10] 2) [Sun, Xu,")
6 Related work in viewpoint invariant detection Multiple, viewpoint dependent representations (connected in different ways) [Thomas et al., 06] [Yan, Khan, Shah 07] [Ozuysal, Lepetit, Fua 09] [Nachimson, Basri 09] [Su, Sun, Fei-Fei, Savarese 09] [Gu, Ren 10] [Stark, Goesele, Schiele 10] 1) 1) 2) Explicit 3D geometry representation [Liebelt, Schmid 10] 2) [Sun, Xu, Bradski, Savarese 10] [Gupta, Efros, Hebert 10] [Chen, Kim, Cipolla 10] [Gupta, Satkin, Efros, Hebert 11] 4
7 Overview Simplify 3D Active Shape Model PCA 3D CAD Models 5
8 Overview Simplify 3D Active Shape Model PCA 3D CAD Models Render Positive examples (per part) 5
9 Overview Simplify 3D Active Shape Model PCA 3D CAD Models Render Positive examples (per part) AdaBoost Negative examples (background) 5
10 Overview Simplify 3D Active Shape Model PCA 3D CAD Models Render Positive examples (per part) AdaBoost Negative examples (background) Detection maps Test image 5
 AdaBoost Negative examples (background) Detection maps Test image")
11 Overview Simplify 3D Active Shape Model PCA Inference 3D CAD Models Render Positive examples (per part) AdaBoost Negative examples (background) Detection maps Test image 5

12 Representation: 3D geometry Simplified 3D wireframes : fixed number of vertices 6
13 Learning: 3D geometry Eigen-Cars Principal Components Analysis (PCA) Tightly constrained global geometry 7
14 Representation: Local appearance Accurate foreground shape Very cheap training data, dense sampling of viewpoints! 8
 + - Annotated vertices are our parts.")
15 Learning: Local appearance Dense Shape Context features [Belongie, Malik. 00] AdaBoost classifiers (per part-viewpoint) + - Annotated vertices are our parts. Related work: [Andriluka, Roth, Schiele 09] 9
16 Inference Test Image 10
17 Inference Test Image Detection maps 10




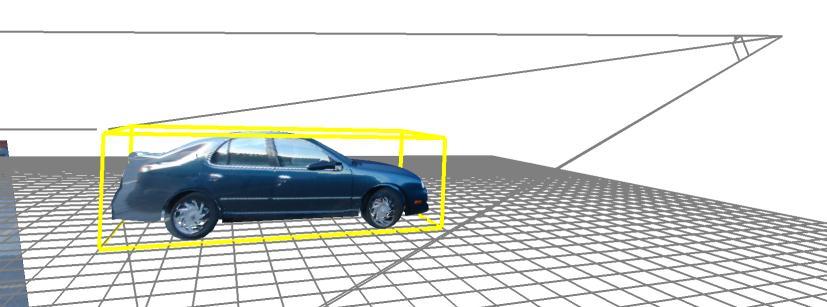
18 Inference Test Image Detection maps Sample 3D wireframes, project, compute image likelihood 10
19 Inference Detection maps Sample 3D cars, project, compute image likelihood image evidence shape of wireframe camera focal length recognition hypothesis viewpoint parameters, azimuth and elevation image space translation and scaling Projection matrix local part scale part likelihood self-occlusion indicator 11




![al., 2007]](/docs-images/90/103495081/images/20-4.jpg "Car class (8")



20 Experimental evaluation Test Dataset Evaluations on 3D Object Classes dataset [Savarese et al., 2007] Car class (8 azimuth angles, 2 elevation angles, 3 distances, varying backgrounds) 240 images, 5 cars 12
.")

21 Experimental evaluation - Training 38 3D CAD models 36 vertices as model points, 20 annotations per model (due to symmetry). Separate local part shape detectors trained from: - 72 different azimuth angles, - 2 different elevation angles (7.5, 15 from ground plane) 13
22 Experimental evaluation - Initialization Two initializations : 20 Stark et al., 2010 (full system) True initial value (tight bounding box, rough azimuth) 14
23 Experimental evaluation - Inference







24 Example wireframe fits Parts correctly localized Full system: 74.2% True initial value: 83.4% 15

25 Fine-grained 3D geometry estimation Accurate estimation of closest 3D CAD model, camera parameters, and ground plane 16
 Impossible using interest point matching Related work: [Bao, Savarese 11]")
26 Ultra-wide baseline matching UW-Baseline matching using only model fits (corresponding part locations) Impossible using interest point matching Related work: [Bao, Savarese 11] 17
 Impossible using interest point matching Related work: [Bao, Savarese 11]")
27 Ultra-wide baseline matching UW-Baseline matching using only model fits (corresponding part locations) Impossible using interest point matching Related work: [Bao, Savarese 11] 18
28 Ultra-wide baseline matching Azimuth Difference No. of Image Pairs True initial value Full system SIFT Part detections only % 55% 2% 27% % 60% 0% 27% % 52% 0% 10% % 41% 0% 24% Correct fit = Sampson error < E max on ground truth correspondences 3D Geometric model improves significantly over part detections only 19
29 Multiview recognition Rescored hypotheses Good 2D localization 20
30 Continuous viewpoint estimation Total Images True Positives % correct azimuth Average error azimuth Average error elevation Stark et al., % Full system % True initial value* % Comparison against ground truth pose, manually labeled. Full system improves 6% over Stark et al., * Approximate pose initialization quantized to 45 steps 21
31 Conclusion 3D deformable object class model have potential for accurate geometric reasoning on scene level. - accurate object localization - geometric parts in 2D - 3D pose estimation Novel application examples - fine-grained object categorization - ultra-wide baseline matching Future extensions - efficient multi-class methods for part likelihoods - analyze importance of geometric model vs. local appearance - occlusion invariance 22
32 OLD SLIDES

33 Learning: 3D Geometry any wireframe mean wireframe weight of k th principal component standard deviation of j th principal component direction of j th principal Eigen-Cars component residual (if r < m)


34 Part localization correct localization ~ localized within 4% of car length from ground truth
35 Experimental evaluation - Inference

36 Experimental evaluation - Inference
Revisiting 3D Geometric Models for Accurate Object Shape and Pose
 Revisiting 3D Geometric Models for Accurate Object Shape and Pose M. Zeeshan Zia 1, Michael Stark 2, Bernt Schiele 2, and Konrad Schindler 1 1 Photogrammetry and Remote Sensing Laboratory, ETH Zürich,
Revisiting 3D Geometric Models for Accurate Object Shape and Pose M. Zeeshan Zia 1, Michael Stark 2, Bernt Schiele 2, and Konrad Schindler 1 1 Photogrammetry and Remote Sensing Laboratory, ETH Zürich,
Lecture 15 Visual recognition
 Lecture 15 Visual recognition 3D object detection Introduction Single instance 3D object detectors Generic 3D object detectors Silvio Savarese Lecture 15-26-Feb-14 3D object detection Object: Building
Lecture 15 Visual recognition 3D object detection Introduction Single instance 3D object detectors Generic 3D object detectors Silvio Savarese Lecture 15-26-Feb-14 3D object detection Object: Building
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Part-Based Models for Object Class Recognition Part 3
 High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
3D 2 PM 3D Deformable Part Models
 3D 2 PM 3D Deformable Part Models Bojan Pepik 1, Peter Gehler 3, Michael Stark 1,2, and Bernt Schiele 1 1 Max Planck Institute for Informatics, 2 Stanford University 3 Max Planck Institute for Intelligent
3D 2 PM 3D Deformable Part Models Bojan Pepik 1, Peter Gehler 3, Michael Stark 1,2, and Bernt Schiele 1 1 Max Planck Institute for Informatics, 2 Stanford University 3 Max Planck Institute for Intelligent
High Level Computer Vision
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
Towards Scene Understanding with Detailed 3D Object Representations
 International Journal of Computer Vision manuscript No. (will be inserted by the editor) Towards Scene Understanding with Detailed 3D Object Representations M. Zeeshan Zia Michael Stark Konrad Schindler
International Journal of Computer Vision manuscript No. (will be inserted by the editor) Towards Scene Understanding with Detailed 3D Object Representations M. Zeeshan Zia Michael Stark Konrad Schindler
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan yuxiang@umich.edu Silvio Savarese Stanford University ssilvio@stanford.edu Abstract We propose a novel framework
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan yuxiang@umich.edu Silvio Savarese Stanford University ssilvio@stanford.edu Abstract We propose a novel framework
Deformable Part Models Revisited: A Performance Evaluation for Object Category Pose Estimation
 Deformable Part Models Revisited: A Performance Evaluation for Object Category Pose Estimation Roberto J. Lo pez-sastre Tinne Tuytelaars2 Silvio Savarese3 GRAM, Dept. Signal Theory and Communications,
Deformable Part Models Revisited: A Performance Evaluation for Object Category Pose Estimation Roberto J. Lo pez-sastre Tinne Tuytelaars2 Silvio Savarese3 GRAM, Dept. Signal Theory and Communications,
EECS 442 Computer vision. 3D Object Recognition and. Scene Understanding
 EECS 442 Computer vision 3D Object Recognition and Scene Understanding Interpreting the visual world Object: Building 8-10 meters away Object: Traffic light Object: Car, ¾ view 2-3 meters away How can
EECS 442 Computer vision 3D Object Recognition and Scene Understanding Interpreting the visual world Object: Building 8-10 meters away Object: Traffic light Object: Car, ¾ view 2-3 meters away How can
3D Object Representations for Recognition. Yu Xiang Computational Vision and Geometry Lab Stanford University
 3D Object Representations for Recognition Yu Xiang Computational Vision and Geometry Lab Stanford University 1 2D Object Recognition Ren et al. NIPS15 Ordonez et al. ICCV13 Image classification/tagging/annotation
3D Object Representations for Recognition Yu Xiang Computational Vision and Geometry Lab Stanford University 1 2D Object Recognition Ren et al. NIPS15 Ordonez et al. ICCV13 Image classification/tagging/annotation
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Toward Coherent Object Detection And Scene Layout Understanding
 Toward Coherent Object Detection And Scene Layout Understanding Sid Ying-Ze Bao Min Sun Silvio Savarese Dept. of Electrical and Computer Engineering, University of Michigan at Ann Arbor, USA {yingze,sunmin,silvio}@eecs.umich.edu
Toward Coherent Object Detection And Scene Layout Understanding Sid Ying-Ze Bao Min Sun Silvio Savarese Dept. of Electrical and Computer Engineering, University of Michigan at Ann Arbor, USA {yingze,sunmin,silvio}@eecs.umich.edu
3D Spatial Layout Propagation in a Video Sequence
 3D Spatial Layout Propagation in a Video Sequence Alejandro Rituerto 1, Roberto Manduchi 2, Ana C. Murillo 1 and J. J. Guerrero 1 arituerto@unizar.es, manduchi@soe.ucsc.edu, acm@unizar.es, and josechu.guerrero@unizar.es
3D Spatial Layout Propagation in a Video Sequence Alejandro Rituerto 1, Roberto Manduchi 2, Ana C. Murillo 1 and J. J. Guerrero 1 arituerto@unizar.es, manduchi@soe.ucsc.edu, acm@unizar.es, and josechu.guerrero@unizar.es
Is 2D Information Enough For Viewpoint Estimation? Amir Ghodrati, Marco Pedersoli, Tinne Tuytelaars BMVC 2014
 Is 2D Information Enough For Viewpoint Estimation? Amir Ghodrati, Marco Pedersoli, Tinne Tuytelaars BMVC 2014 Problem Definition Viewpoint estimation: Given an image, predicting viewpoint for object of
Is 2D Information Enough For Viewpoint Estimation? Amir Ghodrati, Marco Pedersoli, Tinne Tuytelaars BMVC 2014 Problem Definition Viewpoint estimation: Given an image, predicting viewpoint for object of
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Local cues and global constraints in image understanding
 Local cues and global constraints in image understanding Olga Barinova Lomonosov Moscow State University *Many slides adopted from the courses of Anton Konushin Image understanding «To see means to know
Local cues and global constraints in image understanding Olga Barinova Lomonosov Moscow State University *Many slides adopted from the courses of Anton Konushin Image understanding «To see means to know
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
Multi-View Object Class Detection with a 3D Geometric Model
 Multi-View Object Class Detection with a 3D Geometric Model Jörg Liebelt, Cordelia Schmid To cite this version: Jörg Liebelt, Cordelia Schmid. Multi-View Object Class Detection with a 3D Geometric Model.
Multi-View Object Class Detection with a 3D Geometric Model Jörg Liebelt, Cordelia Schmid To cite this version: Jörg Liebelt, Cordelia Schmid. Multi-View Object Class Detection with a 3D Geometric Model.
Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections
 Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections Nima Razavi 1, Juergen Gall 1, and Luc Van Gool 1,2 1 Computer Vision Laboratory, ETH Zurich 2 ESAT-PSI/IBBT,
Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections Nima Razavi 1, Juergen Gall 1, and Luc Van Gool 1,2 1 Computer Vision Laboratory, ETH Zurich 2 ESAT-PSI/IBBT,
3D Pose-by-Detection of Vehicles via Discriminatively Reduced Ensembles of Correlation Filters
 MOVSHOVITZ-ATTIAS, et al.: 3D POSE-BY-DETECTION 1 3D Pose-by-Detection of Vehicles via Discriminatively Reduced Ensembles of Correlation Filters Yair Movshovitz-Attias 1 www.cs.cmu.edu/~ymovshov Vishnu
MOVSHOVITZ-ATTIAS, et al.: 3D POSE-BY-DETECTION 1 3D Pose-by-Detection of Vehicles via Discriminatively Reduced Ensembles of Correlation Filters Yair Movshovitz-Attias 1 www.cs.cmu.edu/~ymovshov Vishnu
Constructing Implicit 3D Shape Models for Pose Estimation
 Constructing Implicit 3D Shape Models for Pose Estimation Mica Arie-Nachimson Ronen Basri Dept. of Computer Science and Applied Math. Weizmann Institute of Science Rehovot 76100, Israel Abstract We present
Constructing Implicit 3D Shape Models for Pose Estimation Mica Arie-Nachimson Ronen Basri Dept. of Computer Science and Applied Math. Weizmann Institute of Science Rehovot 76100, Israel Abstract We present
A Novel Illumination-Invariant Loss for Monocular 3D Pose Estimation
 A Novel Illumination-Invariant Loss for Monocular 3D Pose Estimation Srimal Jayawardena Marcus Hutter Nathan Brewer Australian National University srimal(dot)jayawardena(at)anu(dot)edu(dot)au http://users.cecs.anu.edu.au/~srimalj
A Novel Illumination-Invariant Loss for Monocular 3D Pose Estimation Srimal Jayawardena Marcus Hutter Nathan Brewer Australian National University srimal(dot)jayawardena(at)anu(dot)edu(dot)au http://users.cecs.anu.edu.au/~srimalj
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Viewpoint Invariant Features from Single Images Using 3D Geometry
 Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Efficient Object Localization and Pose Estimation with 3D Wireframe Models
 Efficient Object Localization and Pose Estimation with 3D Wireframe Models Erdem Yörük René Vidal Center for Imaging Science, Johns Hopkins University, Baltimore, MD 21218, USA Abstract We propose a new
Efficient Object Localization and Pose Estimation with 3D Wireframe Models Erdem Yörük René Vidal Center for Imaging Science, Johns Hopkins University, Baltimore, MD 21218, USA Abstract We propose a new
Learning People Detectors for Tracking in Crowded Scenes
 Learning People Detectors for Tracking in Crowded Scenes Siyu Tang1 Mykhaylo Andriluka1 Konrad Schindler3 Stefan Roth2 1 Anton Milan2 Bernt Schiele1 Max Planck Institute for Informatics, Saarbru cken,
Learning People Detectors for Tracking in Crowded Scenes Siyu Tang1 Mykhaylo Andriluka1 Konrad Schindler3 Stefan Roth2 1 Anton Milan2 Bernt Schiele1 Max Planck Institute for Informatics, Saarbru cken,
3D Object Class Detection in the Wild
 3D Object Class Detection in the Wild Bojan Pepik1 1 Michael Stark1 Peter Gehler2 Tobias Ritschel1 Bernt Schiele1 Max Planck Institute for Informatics, 2 Max Planck Institute for Intelligent Systems Abstract
3D Object Class Detection in the Wild Bojan Pepik1 1 Michael Stark1 Peter Gehler2 Tobias Ritschel1 Bernt Schiele1 Max Planck Institute for Informatics, 2 Max Planck Institute for Intelligent Systems Abstract
Learning People Detectors for Tracking in Crowded Scenes
 2013 IEEE International Conference on Computer Vision Learning People Detectors for Tracking in Crowded Scenes Siyu Tang 1 Mykhaylo Andriluka 1 Anton Milan 2 Konrad Schindler 3 Stefan Roth 2 Bernt Schiele
2013 IEEE International Conference on Computer Vision Learning People Detectors for Tracking in Crowded Scenes Siyu Tang 1 Mykhaylo Andriluka 1 Anton Milan 2 Konrad Schindler 3 Stefan Roth 2 Bernt Schiele
What are we trying to achieve? Why are we doing this? What do we learn from past history? What will we talk about today?
 Introduction What are we trying to achieve? Why are we doing this? What do we learn from past history? What will we talk about today? What are we trying to achieve? Example from Scott Satkin 3D interpretation
Introduction What are we trying to achieve? Why are we doing this? What do we learn from past history? What will we talk about today? What are we trying to achieve? Example from Scott Satkin 3D interpretation
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Efficient Detector Adaptation for Object Detection in a Video
 2013 IEEE Conference on Computer Vision and Pattern Recognition Efficient Detector Adaptation for Object Detection in a Video Pramod Sharma and Ram Nevatia Institute for Robotics and Intelligent Systems,
2013 IEEE Conference on Computer Vision and Pattern Recognition Efficient Detector Adaptation for Object Detection in a Video Pramod Sharma and Ram Nevatia Institute for Robotics and Intelligent Systems,
Scene Understanding From a Moving Camera for Object Detection and Free Space Estimation
 Scene Understanding From a Moving Camera for Object Detection and Free Space Estimation Vladimir Haltakov, Heidrun Belzner and Slobodan Ilic Abstract Modern vehicles are equipped with multiple cameras
Scene Understanding From a Moving Camera for Object Detection and Free Space Estimation Vladimir Haltakov, Heidrun Belzner and Slobodan Ilic Abstract Modern vehicles are equipped with multiple cameras
Occlusion Reasoning for Object Detection under Arbitrary Viewpoint
 Occlusion Reasoning for Object Detection under Arbitrary Viewpoint Edward Hsiao and Martial Hebert Robotics Institute, Carnegie Mellon University, USA {ehsiao,hebert}@cs.cmu.edu Abstract We present a unified
Occlusion Reasoning for Object Detection under Arbitrary Viewpoint Edward Hsiao and Martial Hebert Robotics Institute, Carnegie Mellon University, USA {ehsiao,hebert}@cs.cmu.edu Abstract We present a unified
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
Modeling 3D viewpoint for part-based object recognition of rigid objects
 Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Detecting Object Instances Without Discriminative Features
 Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Class-Specific Object Pose Estimation and Reconstruction using 3D Part Geometry
 Class-Specific Object Pose Estimation and Reconstruction using 3D Part Geometry Arun CS Kumar 1 András Bódis-Szomorú 2 Suchendra Bhandarkar 1 Mukta Prasad 3 1 University of Georgia 2 ETH Zürich 3 Trinity
Class-Specific Object Pose Estimation and Reconstruction using 3D Part Geometry Arun CS Kumar 1 András Bódis-Szomorú 2 Suchendra Bhandarkar 1 Mukta Prasad 3 1 University of Georgia 2 ETH Zürich 3 Trinity
Methods for Representing and Recognizing 3D objects
 Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
Simultaneous Recognition and Homography Extraction of Local Patches with a Simple Linear Classifier
 Simultaneous Recognition and Homography Extraction of Local Patches with a Simple Linear Classifier Stefan Hinterstoisser 1, Selim Benhimane 1, Vincent Lepetit 2, Pascal Fua 2, Nassir Navab 1 1 Department
Simultaneous Recognition and Homography Extraction of Local Patches with a Simple Linear Classifier Stefan Hinterstoisser 1, Selim Benhimane 1, Vincent Lepetit 2, Pascal Fua 2, Nassir Navab 1 1 Department
CS 558: Computer Vision 13 th Set of Notes
 CS 558: Computer Vision 13 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Context and Spatial Layout
CS 558: Computer Vision 13 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Context and Spatial Layout
Multiple Viewpoint Recognition and Localization
 Multiple Viewpoint Recognition and Localization Scott Helmer, David Meger, Marius Muja, James J. Little, David G. Lowe University of British Columbia Abstract. This paper presents a novel approach for
Multiple Viewpoint Recognition and Localization Scott Helmer, David Meger, Marius Muja, James J. Little, David G. Lowe University of British Columbia Abstract. This paper presents a novel approach for
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Visual Object Recognition
 Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
PoseEstimationfor CategorySpecific Multiview Object Localization
 PoseEstimationfor CategorySpecific Multiview Object Localization Mustafa Özuysal Vincent Lepetit Pascal Fua Computer Vision Laboratory École Polytechnique Fédérale de Lausanne(EPFL) 5 Lausanne, Switzerland
PoseEstimationfor CategorySpecific Multiview Object Localization Mustafa Özuysal Vincent Lepetit Pascal Fua Computer Vision Laboratory École Polytechnique Fédérale de Lausanne(EPFL) 5 Lausanne, Switzerland
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
3DNN: Viewpoint Invariant 3D Geometry Matching for Scene Understanding
 3DNN: Viewpoint Invariant 3D Geometry Matching for Scene Understanding Scott Satkin Google Inc satkin@googlecom Martial Hebert Carnegie Mellon University hebert@ricmuedu Abstract We present a new algorithm
3DNN: Viewpoint Invariant 3D Geometry Matching for Scene Understanding Scott Satkin Google Inc satkin@googlecom Martial Hebert Carnegie Mellon University hebert@ricmuedu Abstract We present a new algorithm
Continuous Pose Estimation in 2D Images at Instance and Category Levels
 Appearing in the proceedings of the 10th Conference on Computer and Robot Vision (CRV), 2013. Continuous Pose Estimation in 2D Images at Instance and Category Levels Damien Teney University of Liège, Belgium
Appearing in the proceedings of the 10th Conference on Computer and Robot Vision (CRV), 2013. Continuous Pose Estimation in 2D Images at Instance and Category Levels Damien Teney University of Liège, Belgium
arxiv: v3 [cs.cv] 7 Nov 2018
![arxiv: v3 [cs.cv] 7 Nov 2018](/thumbs/96/128009810.jpg "arxiv: v3 [cs.cv] 7 Nov 2018") 3D Pose Estimation for Fine-Grained Object Categories Yaming Wang 1, Xiao Tan 2, Yi Yang 2, Xiao Liu 2, Errui Ding 2, Feng Zhou 2, and Larry S. Davis 1 arxiv:1806.04314v3 [cs.cv] 7 Nov 2018 1 University
3D Pose Estimation for Fine-Grained Object Categories Yaming Wang 1, Xiao Tan 2, Yi Yang 2, Xiao Liu 2, Errui Ding 2, Feng Zhou 2, and Larry S. Davis 1 arxiv:1806.04314v3 [cs.cv] 7 Nov 2018 1 University
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Single-view metrology
 Single-view metrology Magritte, Personal Values, 952 Many slides from S. Seitz, D. Hoiem Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features
Single-view metrology Magritte, Personal Values, 952 Many slides from S. Seitz, D. Hoiem Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features
Object and Class Recognition I:
 Object and Class Recognition I: Object Recognition Lectures 10 Sources ICCV 2005 short courses Li Fei-Fei (UIUC), Rob Fergus (Oxford-MIT), Antonio Torralba (MIT) http://people.csail.mit.edu/torralba/iccv2005
Object and Class Recognition I: Object Recognition Lectures 10 Sources ICCV 2005 short courses Li Fei-Fei (UIUC), Rob Fergus (Oxford-MIT), Antonio Torralba (MIT) http://people.csail.mit.edu/torralba/iccv2005
Specular 3D Object Tracking by View Generative Learning
 Specular 3D Object Tracking by View Generative Learning Yukiko Shinozuka, Francois de Sorbier and Hideo Saito Keio University 3-14-1 Hiyoshi, Kohoku-ku 223-8522 Yokohama, Japan shinozuka@hvrl.ics.keio.ac.jp
Specular 3D Object Tracking by View Generative Learning Yukiko Shinozuka, Francois de Sorbier and Hideo Saito Keio University 3-14-1 Hiyoshi, Kohoku-ku 223-8522 Yokohama, Japan shinozuka@hvrl.ics.keio.ac.jp
Segmenting Objects in Weakly Labeled Videos
 Segmenting Objects in Weakly Labeled Videos Mrigank Rochan, Shafin Rahman, Neil D.B. Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, Canada {mrochan, shafin12, bruce, ywang}@cs.umanitoba.ca
Segmenting Objects in Weakly Labeled Videos Mrigank Rochan, Shafin Rahman, Neil D.B. Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, Canada {mrochan, shafin12, bruce, ywang}@cs.umanitoba.ca
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Efficient Object Detection and Segmentation with a Cascaded Hough Forest ISM
 Efficient Object Detection and Segmentation with a Cascaded Hough Forest ISM Konstantinos Rematas ESAT-PSI / IBBT K.U. Leuven krematas@esat.kuleuven.be Bastian Leibe UMIC Research Centre RWTH Aachen University
Efficient Object Detection and Segmentation with a Cascaded Hough Forest ISM Konstantinos Rematas ESAT-PSI / IBBT K.U. Leuven krematas@esat.kuleuven.be Bastian Leibe UMIC Research Centre RWTH Aachen University
Shape-based instance detection under arbitrary viewpoint
 Shape-based instance detection under arbitrary viewpoint Edward Hsiao and Martial Hebert Abstract Shape-based instance detection under arbitrary viewpoint is a very challenging problem. Current approaches
Shape-based instance detection under arbitrary viewpoint Edward Hsiao and Martial Hebert Abstract Shape-based instance detection under arbitrary viewpoint is a very challenging problem. Current approaches
EE290T : 3D Reconstruction and Recognition
 EE290T : 3D Reconstruction and Recognition Acknowledgement Courtesy of Prof. Silvio Savarese. Introduction There was a table set out under a tree in front of the house, and the March Hare and the Hatter
EE290T : 3D Reconstruction and Recognition Acknowledgement Courtesy of Prof. Silvio Savarese. Introduction There was a table set out under a tree in front of the house, and the March Hare and the Hatter
Announcements. Recognition. Recognition. Recognition. Recognition. Homework 3 is due May 18, 11:59 PM Reading: Computer Vision I CSE 152 Lecture 14
 Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Active View Selection for Object and Pose Recognition
 Active View Selection for Object and Pose Recognition Zhaoyin Jia, Yao-Jen Chang Carnegie Mellon University Pittsburgh, PA, USA {zhaoyin, kevinchang}@cmu.edu Tsuhan Chen Cornell University Ithaca, NY,
Active View Selection for Object and Pose Recognition Zhaoyin Jia, Yao-Jen Chang Carnegie Mellon University Pittsburgh, PA, USA {zhaoyin, kevinchang}@cmu.edu Tsuhan Chen Cornell University Ithaca, NY,
Efficient 3D Object Detection using Multiple Pose-Specific Classifiers
 VILLAMIZAR ET AL.: EFFICIENT 3D DETECTION USING MULTIPLE CLASSIFIERS Efficient 3D Object Detection using Multiple Pose-Specific Michael Villamizar mvillami@iri.upc.edu Helmut Grabner 2 grabner@vision.ee.ethz.ch
VILLAMIZAR ET AL.: EFFICIENT 3D DETECTION USING MULTIPLE CLASSIFIERS Efficient 3D Object Detection using Multiple Pose-Specific Michael Villamizar mvillami@iri.upc.edu Helmut Grabner 2 grabner@vision.ee.ethz.ch
Combining PGMs and Discriminative Models for Upper Body Pose Detection
 Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
3D model search and pose estimation from single images using VIP features
 3D model search and pose estimation from single images using VIP features Changchang Wu 2, Friedrich Fraundorfer 1, 1 Department of Computer Science ETH Zurich, Switzerland {fraundorfer, marc.pollefeys}@inf.ethz.ch
3D model search and pose estimation from single images using VIP features Changchang Wu 2, Friedrich Fraundorfer 1, 1 Department of Computer Science ETH Zurich, Switzerland {fraundorfer, marc.pollefeys}@inf.ethz.ch
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Depth-Encoded Hough Voting for Joint Object Detection and Shape Recovery
 Depth-Encoded Hough Voting for Joint Object Detection and Shape Recovery Min Sun 1 Gary Bradski 2 Bing-Xin Xu 1 Silvio Savarese 1 1 Electrical and Computer Engineering University of Michigan, Ann Arbor,
Depth-Encoded Hough Voting for Joint Object Detection and Shape Recovery Min Sun 1 Gary Bradski 2 Bing-Xin Xu 1 Silvio Savarese 1 1 Electrical and Computer Engineering University of Michigan, Ann Arbor,
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 18 Object Recognition I Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 18 Object Recognition I Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
Object Detection Using Segmented Images
 Object Detection Using Segmented Images Naran Bayanbat Stanford University Palo Alto, CA naranb@stanford.edu Jason Chen Stanford University Palo Alto, CA jasonch@stanford.edu Abstract Object detection
Object Detection Using Segmented Images Naran Bayanbat Stanford University Palo Alto, CA naranb@stanford.edu Jason Chen Stanford University Palo Alto, CA jasonch@stanford.edu Abstract Object detection
PEDESTRIAN DETECTION IN CROWDED SCENES VIA SCALE AND OCCLUSION ANALYSIS
 PEDESTRIAN DETECTION IN CROWDED SCENES VIA SCALE AND OCCLUSION ANALYSIS Lu Wang Lisheng Xu Ming-Hsuan Yang Northeastern University, China University of California at Merced, USA ABSTRACT Despite significant
PEDESTRIAN DETECTION IN CROWDED SCENES VIA SCALE AND OCCLUSION ANALYSIS Lu Wang Lisheng Xu Ming-Hsuan Yang Northeastern University, China University of California at Merced, USA ABSTRACT Despite significant
Course Administration
 Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Automatic occlusion removal from facades for 3D urban reconstruction
 Automatic occlusion removal from facades for 3D urban reconstruction C. Engels 1, D. Tingdahl 1, M. Vercruysse 1, T. Tuytelaars 1, H. Sahli 2, and L. Van Gool 1,3 1 K.U.Leuven, ESAT-PSI/IBBT 2 V.U.Brussel,
Automatic occlusion removal from facades for 3D urban reconstruction C. Engels 1, D. Tingdahl 1, M. Vercruysse 1, T. Tuytelaars 1, H. Sahli 2, and L. Van Gool 1,3 1 K.U.Leuven, ESAT-PSI/IBBT 2 V.U.Brussel,
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Detecting and Segmenting Humans in Crowded Scenes
 Detecting and Segmenting Humans in Crowded Scenes Mikel D. Rodriguez University of Central Florida 4000 Central Florida Blvd Orlando, Florida, 32816 mikel@cs.ucf.edu Mubarak Shah University of Central
Detecting and Segmenting Humans in Crowded Scenes Mikel D. Rodriguez University of Central Florida 4000 Central Florida Blvd Orlando, Florida, 32816 mikel@cs.ucf.edu Mubarak Shah University of Central
Closing the Loop in Scene Interpretation
 Closing the Loop in Scene Interpretation Derek Hoiem Beckman Institute University of Illinois dhoiem@uiuc.edu Alexei A. Efros Robotics Institute Carnegie Mellon University efros@cs.cmu.edu Martial Hebert
Closing the Loop in Scene Interpretation Derek Hoiem Beckman Institute University of Illinois dhoiem@uiuc.edu Alexei A. Efros Robotics Institute Carnegie Mellon University efros@cs.cmu.edu Martial Hebert
Gender Classification
 Gender Classification Thomas Witzig Master student, 76128 Karlsruhe, Germany, Computer Vision for Human-Computer Interaction Lab KIT University of the State of Baden-Wuerttemberg and National Research
Gender Classification Thomas Witzig Master student, 76128 Karlsruhe, Germany, Computer Vision for Human-Computer Interaction Lab KIT University of the State of Baden-Wuerttemberg and National Research
In Good Shape: Robust People Detection based on Appearance and Shape
 PISHCHULIN et al.: PEOPLE DETECTION USING APPEARANCE AND SHAPE 1 In Good Shape: Robust People Detection based on Appearance and Shape Leonid Pishchulin leonid@mpi-inf.mpg.de Arjun Jain ajain@mpi-inf.mpg.de
PISHCHULIN et al.: PEOPLE DETECTION USING APPEARANCE AND SHAPE 1 In Good Shape: Robust People Detection based on Appearance and Shape Leonid Pishchulin leonid@mpi-inf.mpg.de Arjun Jain ajain@mpi-inf.mpg.de
3dRR: Representation and Recognition
 CS331B (3 units) 3dRR: Representation and Recognition Instructor: Silvio Savarese Email: ssilvio@stanford.edu Office: Gates, room: 228 Office hour: by appointment TA: Scott Chung scottc52@gmail.com Class
CS331B (3 units) 3dRR: Representation and Recognition Instructor: Silvio Savarese Email: ssilvio@stanford.edu Office: Gates, room: 228 Office hour: by appointment TA: Scott Chung scottc52@gmail.com Class
Visual Object Recognition
 Visual Object Recognition -67777 Instructor: Daphna Weinshall, daphna@cs.huji.ac.il Office: Ross 211 Office hours: Sunday 12:00-13:00 1 Sources Recognizing and Learning Object Categories ICCV 2005 short
Visual Object Recognition -67777 Instructor: Daphna Weinshall, daphna@cs.huji.ac.il Office: Ross 211 Office hours: Sunday 12:00-13:00 1 Sources Recognizing and Learning Object Categories ICCV 2005 short
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Geometric verifica-on of matching
 Geometric verifica-on of matching The correspondence problem The correspondence problem tries to figure out which parts of an image correspond to which parts of another image, a;er the camera has moved,
Geometric verifica-on of matching The correspondence problem The correspondence problem tries to figure out which parts of an image correspond to which parts of another image, a;er the camera has moved,
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
Occlusion Patterns for Object Class Detection
 Occlusion Patterns for Object Class Detection Bojan Pepik1 Michael Stark1,2 Peter Gehler3 Bernt Schiele1 Max Planck Institute for Informatics, 2Stanford University, 3Max Planck Institute for Intelligent
Occlusion Patterns for Object Class Detection Bojan Pepik1 Michael Stark1,2 Peter Gehler3 Bernt Schiele1 Max Planck Institute for Informatics, 2Stanford University, 3Max Planck Institute for Intelligent
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Part-based models. Lecture 10
 Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Viewpoint-Aware Object Detection and Continuous Pose Estimation
 Viewpoint-Aware Object Detection and Continuous Pose Estimation Daniel Glasner a, Meirav Galun a, Sharon Alpert a, Ronen Basri a, Gregory Shakhnarovich b a Department of Computer Science and Applied Mathematics
Viewpoint-Aware Object Detection and Continuous Pose Estimation Daniel Glasner a, Meirav Galun a, Sharon Alpert a, Ronen Basri a, Gregory Shakhnarovich b a Department of Computer Science and Applied Mathematics
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
arxiv: v1 [cs.cv] 1 Dec 2016
![arxiv: v1 [cs.cv] 1 Dec 2016](/thumbs/89/98666847.jpg "arxiv: v1 [cs.cv] 1 Dec 2016") arxiv:1612.00496v1 [cs.cv] 1 Dec 2016 3D Bounding Box Estimation Using Deep Learning and Geometry Arsalan Mousavian George Mason University Dragomir Anguelov Zoox, Inc. John Flynn Zoox, Inc. amousavi@gmu.edu
arxiv:1612.00496v1 [cs.cv] 1 Dec 2016 3D Bounding Box Estimation Using Deep Learning and Geometry Arsalan Mousavian George Mason University Dragomir Anguelov Zoox, Inc. John Flynn Zoox, Inc. amousavi@gmu.edu
FPM: Fine Pose Parts-Based Model with 3D CAD Models
 FPM: Fine Pose Parts-Based Model with 3D CAD Models The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published Publisher
FPM: Fine Pose Parts-Based Model with 3D CAD Models The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published Publisher
3D Object Detection and Pose Estimation. Yu Xiang University of Michigan 1st Workshop on Recovering 6D Object Pose 12/17/2015
 3D Object Detection and Pose Estimation Yu Xiang University of Michigan 1st Workshop on Recovering 6D Object Pose 12/17/2015 1 2D Object Detection 2 2D detection is NOT enough! 3 Applications that need
3D Object Detection and Pose Estimation Yu Xiang University of Michigan 1st Workshop on Recovering 6D Object Pose 12/17/2015 1 2D Object Detection 2 2D detection is NOT enough! 3 Applications that need
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
LEARNING BOUNDARIES WITH COLOR AND DEPTH. Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen
 LEARNING BOUNDARIES WITH COLOR AND DEPTH Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen School of Electrical and Computer Engineering, Cornell University ABSTRACT To enable high-level understanding of a scene,
LEARNING BOUNDARIES WITH COLOR AND DEPTH Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen School of Electrical and Computer Engineering, Cornell University ABSTRACT To enable high-level understanding of a scene,
Context. CS 554 Computer Vision Pinar Duygulu Bilkent University. (Source:Antonio Torralba, James Hays)
") Context CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Antonio Torralba, James Hays) A computer vision goal Recognize many different objects under many viewing conditions in unconstrained
Context CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Antonio Torralba, James Hays) A computer vision goal Recognize many different objects under many viewing conditions in unconstrained
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer