CS 558: Computer Vision 13 th Set of Notes
|
|
|
- Oscar Walker
- 5 years ago
- Views:
Transcription
1 CS 558: Computer Vision 13 th Set of Notes Instructor: Philippos Mordohai Webpage: Office: Lieb 215
2 Overview Context and Spatial Layout Relating Objects and Geometry Putting Objects in Perspective Interpretation of indoor scenes Based on slides by D. Hoiem

3 Context in Recognition Objects usually are surrounded by a scene that can provide context in the form of nearby objects, surfaces, scene category, geometry, etc.
4 Context provides clues for function What is this? Examples from Antonio Torralba


5 Context provides clues for function What is this? Now can you tell?
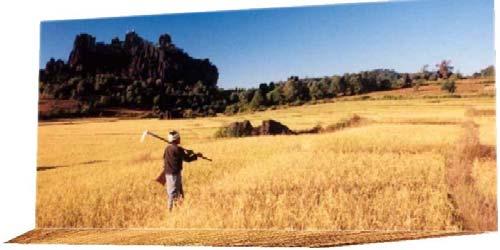
6 Sometimes context is the major component of recognition What is this?


7 Sometimes context is the major component of recognition What is this? Now can you tell?
8 More Low-Res What are these blobs?

9 More Low-Res The same pixels! (a car)
10 There are many types of context Local pixels window, surround, image neighborhood, object boundary/shape, global image statistics 2D Scene Gist global image statistics 3D Geometric 3D scene layout, support surface, surface orientations, occlusions, contact points, etc. Semantic event/activity depicted, scene category, objects present in the scene and their spatial extents, keywords Photogrammetric camera height orientation, focal length, lens distortion, radiometric, response function Illumination sun direction, sky color, cloud cover, shadow contrast, etc. Geographic GPS location, terrain type, land use category, elevation, population density, etc. Temporal nearby frames of video, photos taken at similar times, videos of similar scenes, time of capture Cultural photographer bias, dataset selection bias, visual clichés, etc. from Divvala et al. CVPR 2009

11 Jason Salavon: Cultural context

12 Cultural context Mildred and Lisa : Who is Mildred? Who is Lisa? Andrew Gallagher:
13 Cultural context Age given Appearance Age given Name Andrew Gallagher:




14 Spatial layout is especially important 1. Context for recognition


15 Spatial layout is especially important 1. Context for recognition

16 Spatial layout is especially important 1. Context for recognition 2. Scene understanding
17 Spatial Layout: 2D vs. 3D
18 But object relations are in 3D Close Not Close

19 Highly Structured 3D Models Figs from Hoiem - Savarese 2011 book


20 High detail, Low abstraction Depth Map Saxena, Chung & Ng 2005, 2007

21 Medium detail, High abstraction Room as a Box Hedau Hoiem Forsyth 2009



22 Med-High detail, High abstraction Complete 3D Layout Guo Zou Hoiem 2015



23 Surface Layout: describe 3D surfaces with geometric classes Sky Non-Planar Porous Vertical Non-Planar Solid Support Planar (Left/Center/Right)

24 The challenge???


25 Our World is Structured Abstract World Our World Image Credit (left): F. Cunin and M.J. Sailor, UCSD














26 Learn the Structure of the World Training Images

27 Infer the most likely interpretation Unlikely Likely

28 Geometry estimation as recognition Features Color Texture Perspective Position Surface Geometry Classifier Vertical, Planar Region Training Data



29 Use a variety of image cues Color, texture, image location Vanishing points, lines Texture gradient

30 Surface Layout Algorithm Input Image Segmentation Features Perspective Color Texture Position Surface Labels Trained Region Classifier Training Data Hoiem Efros Hebert (2007)
31 Surface Layout Algorithm Input Image Multiple Segmentations Features Perspective Color Texture Position Confidence-Weighted Predictions Final Surface Labels Trained Region Classifier Training Data Hoiem Efros Hebert (2007)

, Porous")
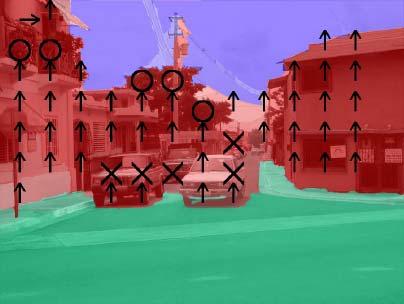
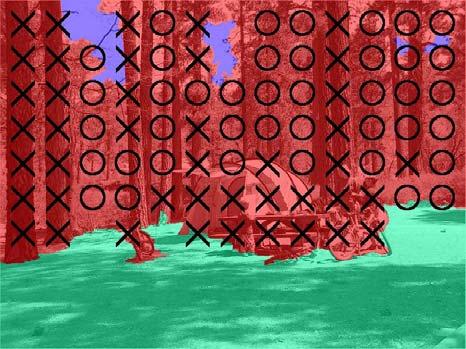
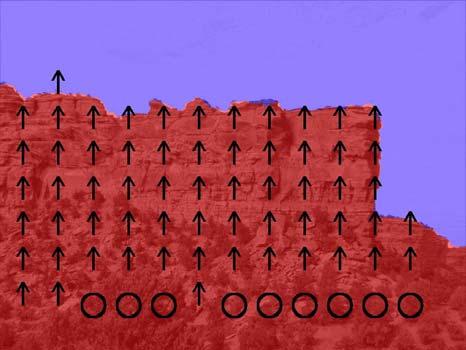
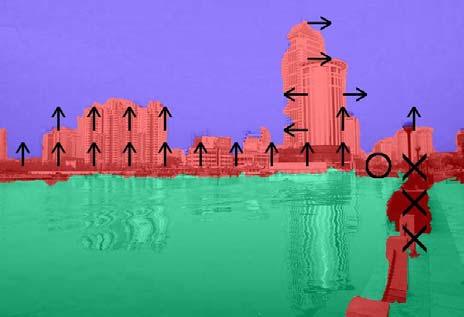
32 Geometric Classes Ground Vertical Planar: facing Left ( ), Center ( ), Right ( ) Non-planar: Solid (X), Porous (O) or wiry Sky

33 Surface Description Result

34 Automatic Photo Popup Labeled Image Fit Ground-Vertical Boundary with Line Segments Form Segments into Polylines Cut and Fold Final Pop-up Model [Hoiem Efros Hebert 2005]

35 The World Behind the Image




36 Geometric Cues Color Texture Location Perspective






37 Need Good Spatial Support 50x50 Patch 50x50 Patch Color Texture Perspective Color Texture Perspective
38 Need Good Spatial Support
39 Image Segmentation Single segmentation won t work Solution: multiple segmentations
 P(label good segment,")
40 Labeling Segments For each segment: -Get P(good segment data) P(label good segment, data)

 P( label good")
41 Image Labeling Labeled Segmentations Labeled Pixels P( label data) segments P( good segment data) P( label good segment, data)





42 Labeling Results Input image Ground Truth Hoiem et al.




43 Results Input Image Ground Truth Hoiem et al.





44 Results Input Image Ground Truth Hoiem et al.






45 Results Input Image Ground Truth Hoiem et al.



46 Failures: Reflections, Rare Viewpoint Input Image Ground Truth Hoiem et al.
47 Average Accuracy Main Class: 88% Subclasses: 61%

48 48 Automatic Photo Popup [SIGGRAPH 2005]
49 Relating Objects and Geometry

50 Knowledge of Geometry Critical for Object Detection? 2? 1? 3

51 Geometrically Coherent Interpretation Geometry Objects Image v 0 : horizon position Camera Parameters y c : camera height
52 What can we do with these models? Local Queries (marginalization) What is the likelihood that this is a car? What is the distribution of the camera height given the image? Global Queries (maximization) What is the most likely complete hypothesis of objects, geometry, parameters?

53 Objects Object detector: Defines a set of objects Estimate likelihood of object identities at possible locations/scales Learn distribution of object heights in the 3D world E.g. consumerreports.com for cars








54 Geometry Image Labels Ground Vertical Sky V-Left V-Center V-Right V-Porous V-Solid Geometry estimates: produce probability maps for each label Compute: Likelihoods of object identities at each position given the geometry and image data Likelihood of geometry given image data Initial estimates (top of ground, bottom of sky) help horizon estimate

55 Camera Parameters Camera Height Estimate prior from training images Horizon Position Estimate based on prior, estimated geometry, and potential vanishing points Identified objects of known height distribution help refine camera parameter estimates Image Plane Horizon Position Camera Object Image Height Camera Height 3D Object 3D Object Object World Height Object World Height


56 Local Queries (Marginalization) Exact marginalization not tractable Assumptions Objects depend on local geometry Local geometry independent Objects independent given camera parameters Approximations Marginalize only over hypotheses that have at most one other object Discard extremely unlikely objects/camera parameters early
")
 given")
57 How far can camera parameters get us? What the system knows: Estimated horizon position Camera height prior (in meters) Distribution of car heights in the world (in meters) No other image data! What the system tells you: 50% confidence interval for size of car (in the image) given bottom-center position 50% confidence intervals for camera parameters
58 Hallucinations: Camera Parameters No Objects Given 1 Object Given
59 Hallucinations: Camera Parameters No Objects Given 1 Object Given

60 How far can camera parameters and geometry get us? What the system knows: Same as before but with geometry estimates No other image data! What the system tells you: Most likely position/size of car in image 50% confidence intervals for camera parameters


61 Hallucinations: Geometry and Camera Parameters Estimated Geometry No Object Given 1 Object Given
?")


62 How much do geometry estimates help (with local image data)? 40 contextual features based on average confidence values of geometric labels within windows Above Object Window Below [ICCV 2005]




63 Example Results [Murphy et al., 2003] [Hoiem et al., 2005] + 40 context features [ICCV 2005]
64 64 Global Queries (Maximization) Provides full image interpretation (for modeled aspects of scene) Finding optimal solution is intractable Branch and bound algorithm Greedy algorithms Usefulness depends on the peakedness of the joint distribution
65 Putting Objects in Perspective Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University Robotics Institute
66 Local Object Detection True Detection False Detections Missed Missed True Detections Local Detector: [Dalal-Triggs 2005]
67 Real Relationships are 3D Close Not Close
68 Objects and Scenes Hock, Romanski, Galie, & Williams 1978 Biederman s Relations among Objects in a Well-Formed Scene (1981): Support Size Position Interposition Likelihood of Appearance
69 Contribution of this Research Hock, Romanski, Galie, & Williams 1978 Biederman s Relations among Objects in a Well-Formed Scene (1981): Support Size Position Interposition Likelihood of Appearance
70 Object Support

71 Object Size in the Image Is the person or the car taller? World
72 Object Size Camera Viewpoint Input Image Loose Viewpoint Prior
73 Object Size Camera Viewpoint Object Position/Sizes Viewpoint
74 Object Size Camera Viewpoint Object Position/Sizes Viewpoint
75 Object Size Camera Viewpoint Object Position/Sizes Viewpoint
76 Object Size Camera Viewpoint Object Position/Sizes Viewpoint

 P(object surfaces)")
77 What does surface and viewpoint say about objects? Image P(surfaces) P(viewpoint) P(object) P(object surfaces) P(object viewpoint)
78 What does surface and viewpoint say about objects? Image P(surfaces) P(viewpoint) P(object) P(object surfaces, viewpoint)
79 Scene Parts Are All Interconnected Objects Camera Viewpoint 3D Surfaces




80 Input to Algorithm Object Detection Surface Estimates Viewpoint Prior Local Car Detector Local Ped Detector Local Detector: [Dalal-Triggs 2005] Surfaces: [Hoiem-Efros-Hebert 2005]
81 Scene Parts Are All Interconnected Objects Viewpoint 3D Surfaces

82 Approximate Model Objects Viewpoint 3D Surfaces

83 Object detection Car: TP / FP Ped: TP / FP Initial (Local) Final (Global) Car Detection 4 TP / 2 FP 4 TP / 1 FP Ped Detection 3 TP / 2 FP 4 TP / 0 FP Local Detector: [Dalal-Triggs 2005]








84 Experiments on LabelMe Dataset Testing with LabelMe dataset: Cars as small as 14 pixels Peds as small as 36 pixels
85 More Tasks Better Detection Local Detector from Murphy et al All Information Objects + View Objects + Geom Objects Only Car Detection Pedestrian Detection All Information Objects + View Objects + Geom Objects Only [Hoiem Efros Hebert 2006]
86 Good Detectors Become Better Local Detector from Dalal-Triggs 2005 All Information Objects Only Car Detection All Information Objects Only Pedestrian Detection


87 Better Detectors Better Viewpoint Median Error: Horizon Prior Using 2003 Local Detector Using 2005 Local Detector 8.5% 3.8% 3.0% 90% Bound:
88 More is Better More objects Detect Cars Only Detect Peds Only Detect Both Better viewpoint estimates 7.3% Error 5.0% Error 3.8% Error Better viewpoint Better object detection 10% fewer false positives at same detection rate

89 Qualitative Results Car: TP / FP Ped: TP / FP Initial: 6 TP / 1 FP Final: 9 TP / 0 FP
90 Qualitative Results Car: TP / FP Ped: TP / FP Initial: 3 TP / 3 FP Final: 5 TP / 1 FP

91 Putting Objects in Perspective meters Ped Car Ped meters
92 Interpretation of indoor scenes
93









94 Vision = assigning labels to pixels? Lamp Wall Sofa Table Floor Floor




95 Vision = interpreting within physical space Wall Sofa Table Floor
96 Physical space needed for affordance Is this a good place to sit? Could I stand over here? Can I put my cup here? Walkable path


97 Physical space needed for recognition Apparent shape depends strongly on viewpoint


98 Physical space needed for recognition Vanishing point
99 Key challenges How to represent the physical space? Requires seeing beyond the visible How to estimate the physical space? Requires simplified models Requires learning from examples
100 Hedau Hoiem Forsyth, ICCV 2009 Box Layout Room is an oriented 3D box Three vanishing points specify orientation Two pairs of sampled rays specify position/size

101 Another box consistent with the same vanishing points Box Layout

102 Image Cues for Box Layout Straight edges Edges on floor/wall surfaces are usually oriented towards VPs Edges on objects might mislead Appearance of visible surfaces Floor, wall, ceiling, object labels should be consistent with box floor left wall right wall objects


103 Box Layout Algorithm 1. Detect edges 2. Estimate 3 orthogonal vanishing points + 3. Apply region classifier to label pixels with visible surfaces Boosted decision trees on region based on color, texture, edges, position 4. Generate box candidates by sampling pairs of rays from VPs 5. Score each box based on edges and pixel labels Learn score via structured learning 6. Jointly refine box layout and pixel labels to get final estimate





104 Evaluation Dataset: 308 indoor images Train with 204 images, test with 104 images





105 Experimental results Detected Edges Surface Labels Box Layout Detected Edges Surface Labels Box Layout




106 Experimental results Detected Edges Surface Labels Box Layout Detected Edges Surface Labels Box Layout
107 Experimental results Joint reasoning of surface label / box layout helps Pixel error: 26.5% 21.2% Corner error: 7.4% 6.3% Similar performance for cluttered and uncluttered rooms

108 Using room layout to improve object detection Box layout helps 1. Predict the appearance of objects, because they are often aligned with the room 2. Predict the position and size of objects, due to physical constraints and size consistency 2D Bed Detection 3D Bed Detection with Scene Geometry Hedau, Hoiem, Forsyth, ECCV 2010, CVPR 2012
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
Context. CS 554 Computer Vision Pinar Duygulu Bilkent University. (Source:Antonio Torralba, James Hays)
") Context CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Antonio Torralba, James Hays) A computer vision goal Recognize many different objects under many viewing conditions in unconstrained
Context CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Antonio Torralba, James Hays) A computer vision goal Recognize many different objects under many viewing conditions in unconstrained
Closing the Loop in Scene Interpretation
 Closing the Loop in Scene Interpretation Derek Hoiem Beckman Institute University of Illinois dhoiem@uiuc.edu Alexei A. Efros Robotics Institute Carnegie Mellon University efros@cs.cmu.edu Martial Hebert
Closing the Loop in Scene Interpretation Derek Hoiem Beckman Institute University of Illinois dhoiem@uiuc.edu Alexei A. Efros Robotics Institute Carnegie Mellon University efros@cs.cmu.edu Martial Hebert
Local cues and global constraints in image understanding
 Local cues and global constraints in image understanding Olga Barinova Lomonosov Moscow State University *Many slides adopted from the courses of Anton Konushin Image understanding «To see means to know
Local cues and global constraints in image understanding Olga Barinova Lomonosov Moscow State University *Many slides adopted from the courses of Anton Konushin Image understanding «To see means to know
Automatic Photo Popup
 Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Can Similar Scenes help Surface Layout Estimation?
 Can Similar Scenes help Surface Layout Estimation? Santosh K. Divvala, Alexei A. Efros, Martial Hebert Robotics Institute, Carnegie Mellon University. {santosh,efros,hebert}@cs.cmu.edu Abstract We describe
Can Similar Scenes help Surface Layout Estimation? Santosh K. Divvala, Alexei A. Efros, Martial Hebert Robotics Institute, Carnegie Mellon University. {santosh,efros,hebert}@cs.cmu.edu Abstract We describe
Correcting User Guided Image Segmentation
 Correcting User Guided Image Segmentation Garrett Bernstein (gsb29) Karen Ho (ksh33) Advanced Machine Learning: CS 6780 Abstract We tackle the problem of segmenting an image into planes given user input.
Correcting User Guided Image Segmentation Garrett Bernstein (gsb29) Karen Ho (ksh33) Advanced Machine Learning: CS 6780 Abstract We tackle the problem of segmenting an image into planes given user input.
3D Spatial Layout Propagation in a Video Sequence
 3D Spatial Layout Propagation in a Video Sequence Alejandro Rituerto 1, Roberto Manduchi 2, Ana C. Murillo 1 and J. J. Guerrero 1 arituerto@unizar.es, manduchi@soe.ucsc.edu, acm@unizar.es, and josechu.guerrero@unizar.es
3D Spatial Layout Propagation in a Video Sequence Alejandro Rituerto 1, Roberto Manduchi 2, Ana C. Murillo 1 and J. J. Guerrero 1 arituerto@unizar.es, manduchi@soe.ucsc.edu, acm@unizar.es, and josechu.guerrero@unizar.es
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
CEng Computational Vision
 CEng 583 - Computational Vision 2011-2012 Spring Week 4 18 th of March, 2011 Today 3D Vision Binocular (Multi-view) cues: Stereopsis Motion Monocular cues Shading Texture Familiar size etc. "God must
CEng 583 - Computational Vision 2011-2012 Spring Week 4 18 th of March, 2011 Today 3D Vision Binocular (Multi-view) cues: Stereopsis Motion Monocular cues Shading Texture Familiar size etc. "God must
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Segmentation. Bottom up Segmentation Semantic Segmentation
 Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Support surfaces prediction for indoor scene understanding
 2013 IEEE International Conference on Computer Vision Support surfaces prediction for indoor scene understanding Anonymous ICCV submission Paper ID 1506 Abstract In this paper, we present an approach to
2013 IEEE International Conference on Computer Vision Support surfaces prediction for indoor scene understanding Anonymous ICCV submission Paper ID 1506 Abstract In this paper, we present an approach to
Region-based Segmentation and Object Detection
 Region-based Segmentation and Object Detection Stephen Gould Tianshi Gao Daphne Koller Presented at NIPS 2009 Discussion and Slides by Eric Wang April 23, 2010 Outline Introduction Model Overview Model
Region-based Segmentation and Object Detection Stephen Gould Tianshi Gao Daphne Koller Presented at NIPS 2009 Discussion and Slides by Eric Wang April 23, 2010 Outline Introduction Model Overview Model
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
CS395T paper review. Indoor Segmentation and Support Inference from RGBD Images. Chao Jia Sep
 CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
Supplementary Material: Piecewise Planar and Compact Floorplan Reconstruction from Images
 Supplementary Material: Piecewise Planar and Compact Floorplan Reconstruction from Images Ricardo Cabral Carnegie Mellon University rscabral@cmu.edu Yasutaka Furukawa Washington University in St. Louis
Supplementary Material: Piecewise Planar and Compact Floorplan Reconstruction from Images Ricardo Cabral Carnegie Mellon University rscabral@cmu.edu Yasutaka Furukawa Washington University in St. Louis
Recovering the Spatial Layout of Cluttered Rooms
 Recovering the Spatial Layout of Cluttered Rooms Varsha Hedau Electical and Computer Engg. Department University of Illinois at Urbana Champaign vhedau2@uiuc.edu Derek Hoiem, David Forsyth Computer Science
Recovering the Spatial Layout of Cluttered Rooms Varsha Hedau Electical and Computer Engg. Department University of Illinois at Urbana Champaign vhedau2@uiuc.edu Derek Hoiem, David Forsyth Computer Science
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues
 2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
Single-view 3D reasoning
 Single-view 3D reasoning Lecturer: Bryan Russell UW CSE 576, May 2013 Slides borrowed from Antonio Torralba, Alyosha Efros, Antonio Criminisi, Derek Hoiem, Steve Seitz, Stephen Palmer, Abhinav Gupta, James
Single-view 3D reasoning Lecturer: Bryan Russell UW CSE 576, May 2013 Slides borrowed from Antonio Torralba, Alyosha Efros, Antonio Criminisi, Derek Hoiem, Steve Seitz, Stephen Palmer, Abhinav Gupta, James
Focusing Attention on Visual Features that Matter
 TSAI, KUIPERS: FOCUSING ATTENTION ON VISUAL FEATURES THAT MATTER 1 Focusing Attention on Visual Features that Matter Grace Tsai gstsai@umich.edu Benjamin Kuipers kuipers@umich.edu Electrical Engineering
TSAI, KUIPERS: FOCUSING ATTENTION ON VISUAL FEATURES THAT MATTER 1 Focusing Attention on Visual Features that Matter Grace Tsai gstsai@umich.edu Benjamin Kuipers kuipers@umich.edu Electrical Engineering
Detecting Object Instances Without Discriminative Features
 Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Data-driven Depth Inference from a Single Still Image
 Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Decomposing a Scene into Geometric and Semantically Consistent Regions
 Decomposing a Scene into Geometric and Semantically Consistent Regions Stephen Gould sgould@stanford.edu Richard Fulton rafulton@cs.stanford.edu Daphne Koller koller@cs.stanford.edu IEEE International
Decomposing a Scene into Geometric and Semantically Consistent Regions Stephen Gould sgould@stanford.edu Richard Fulton rafulton@cs.stanford.edu Daphne Koller koller@cs.stanford.edu IEEE International
What are we trying to achieve? Why are we doing this? What do we learn from past history? What will we talk about today?
 Introduction What are we trying to achieve? Why are we doing this? What do we learn from past history? What will we talk about today? What are we trying to achieve? Example from Scott Satkin 3D interpretation
Introduction What are we trying to achieve? Why are we doing this? What do we learn from past history? What will we talk about today? What are we trying to achieve? Example from Scott Satkin 3D interpretation
3D layout propagation to improve object recognition in egocentric videos
 3D layout propagation to improve object recognition in egocentric videos Alejandro Rituerto, Ana C. Murillo and José J. Guerrero {arituerto,acm,josechu.guerrero}@unizar.es Instituto de Investigación en
3D layout propagation to improve object recognition in egocentric videos Alejandro Rituerto, Ana C. Murillo and José J. Guerrero {arituerto,acm,josechu.guerrero}@unizar.es Instituto de Investigación en
3DNN: Viewpoint Invariant 3D Geometry Matching for Scene Understanding
 3DNN: Viewpoint Invariant 3D Geometry Matching for Scene Understanding Scott Satkin Google Inc satkin@googlecom Martial Hebert Carnegie Mellon University hebert@ricmuedu Abstract We present a new algorithm
3DNN: Viewpoint Invariant 3D Geometry Matching for Scene Understanding Scott Satkin Google Inc satkin@googlecom Martial Hebert Carnegie Mellon University hebert@ricmuedu Abstract We present a new algorithm
Interpreting 3D Scenes Using Object-level Constraints
 Interpreting 3D Scenes Using Object-level Constraints Rehan Hameed Stanford University 353 Serra Mall, Stanford CA rhameed@stanford.edu Abstract As humans we are able to understand the structure of a scene
Interpreting 3D Scenes Using Object-level Constraints Rehan Hameed Stanford University 353 Serra Mall, Stanford CA rhameed@stanford.edu Abstract As humans we are able to understand the structure of a scene
Shadows in the graphics pipeline
 Shadows in the graphics pipeline Steve Marschner Cornell University CS 569 Spring 2008, 19 February There are a number of visual cues that help let the viewer know about the 3D relationships between objects
Shadows in the graphics pipeline Steve Marschner Cornell University CS 569 Spring 2008, 19 February There are a number of visual cues that help let the viewer know about the 3D relationships between objects
Blocks World Revisited: Image Understanding Using Qualitative Geometry and Mechanics
 Carnegie Mellon University Research Showcase @ CMU Robotics Institute School of Computer Science 9-2010 Blocks World Revisited: Image Understanding Using Qualitative Geometry and Mechanics Abhinav Gupta
Carnegie Mellon University Research Showcase @ CMU Robotics Institute School of Computer Science 9-2010 Blocks World Revisited: Image Understanding Using Qualitative Geometry and Mechanics Abhinav Gupta
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Object Detection Using Cascaded Classification Models
 Object Detection Using Cascaded Classification Models Chau Nguyen December 17, 2010 Abstract Building a robust object detector for robots is alway essential for many robot operations. The traditional problem
Object Detection Using Cascaded Classification Models Chau Nguyen December 17, 2010 Abstract Building a robust object detector for robots is alway essential for many robot operations. The traditional problem
c 2011 Varsha Chandrashekhar Hedau
 c 2011 Varsha Chandrashekhar Hedau 3D SPATIAL LAYOUT AND GEOMETRIC CONSTRAINTS FOR SCENE UNDERSTANDING BY VARSHA CHANDRASHEKHAR HEDAU DISSERTATION Submitted in partial fulfillment of the requirements for
c 2011 Varsha Chandrashekhar Hedau 3D SPATIAL LAYOUT AND GEOMETRIC CONSTRAINTS FOR SCENE UNDERSTANDING BY VARSHA CHANDRASHEKHAR HEDAU DISSERTATION Submitted in partial fulfillment of the requirements for
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan yuxiang@umich.edu Silvio Savarese Stanford University ssilvio@stanford.edu Abstract We propose a novel framework
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan yuxiang@umich.edu Silvio Savarese Stanford University ssilvio@stanford.edu Abstract We propose a novel framework
Viewpoint Invariant Features from Single Images Using 3D Geometry
 Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Visual localization using global visual features and vanishing points
 Visual localization using global visual features and vanishing points Olivier Saurer, Friedrich Fraundorfer, and Marc Pollefeys Computer Vision and Geometry Group, ETH Zürich, Switzerland {saurero,fraundorfer,marc.pollefeys}@inf.ethz.ch
Visual localization using global visual features and vanishing points Olivier Saurer, Friedrich Fraundorfer, and Marc Pollefeys Computer Vision and Geometry Group, ETH Zürich, Switzerland {saurero,fraundorfer,marc.pollefeys}@inf.ethz.ch
Learning Spatial Context: Using Stuff to Find Things
 Learning Spatial Context: Using Stuff to Find Things Wei-Cheng Su Motivation 2 Leverage contextual information to enhance detection Some context objects are non-rigid and are more naturally classified
Learning Spatial Context: Using Stuff to Find Things Wei-Cheng Su Motivation 2 Leverage contextual information to enhance detection Some context objects are non-rigid and are more naturally classified
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
HOG-based Pedestriant Detector Training
 HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
Revisiting 3D Geometric Models for Accurate Object Shape and Pose
 Revisiting 3D Geometric Models for Accurate Object Shape and Pose M. 1 Michael Stark 2,3 Bernt Schiele 3 Konrad Schindler 1 1 Photogrammetry and Remote Sensing Laboratory Swiss Federal Institute of Technology
Revisiting 3D Geometric Models for Accurate Object Shape and Pose M. 1 Michael Stark 2,3 Bernt Schiele 3 Konrad Schindler 1 1 Photogrammetry and Remote Sensing Laboratory Swiss Federal Institute of Technology
Indoor Object Recognition of 3D Kinect Dataset with RNNs
 Indoor Object Recognition of 3D Kinect Dataset with RNNs Thiraphat Charoensripongsa, Yue Chen, Brian Cheng 1. Introduction Recent work at Stanford in the area of scene understanding has involved using
Indoor Object Recognition of 3D Kinect Dataset with RNNs Thiraphat Charoensripongsa, Yue Chen, Brian Cheng 1. Introduction Recent work at Stanford in the area of scene understanding has involved using
Single-view metrology
 Single-view metrology Magritte, Personal Values, 952 Many slides from S. Seitz, D. Hoiem Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features
Single-view metrology Magritte, Personal Values, 952 Many slides from S. Seitz, D. Hoiem Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
CS4495/6495 Introduction to Computer Vision. 3B-L3 Stereo correspondence
 CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
Simple 3D Reconstruction of Single Indoor Image with Perspe
 Simple 3D Reconstruction of Single Indoor Image with Perspective Cues Jingyuan Huang Bill Cowan University of Waterloo May 26, 2009 1 Introduction 2 Our Method 3 Results and Conclusions Problem Statement
Simple 3D Reconstruction of Single Indoor Image with Perspective Cues Jingyuan Huang Bill Cowan University of Waterloo May 26, 2009 1 Introduction 2 Our Method 3 Results and Conclusions Problem Statement
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Scene Modeling for a Single View
 on to 3D Scene Modeling for a Single View We want real 3D scene walk-throughs: rotation translation Can we do it from a single photograph? Reading: A. Criminisi, I. Reid and A. Zisserman, Single View Metrology
on to 3D Scene Modeling for a Single View We want real 3D scene walk-throughs: rotation translation Can we do it from a single photograph? Reading: A. Criminisi, I. Reid and A. Zisserman, Single View Metrology
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Combining Semantic Scene Priors and Haze Removal for Single Image Depth Estimation
 Combining Semantic Scene Priors and Haze Removal for Single Image Depth Estimation Ke Wang Enrique Dunn Joseph Tighe Jan-Michael Frahm University of North Carolina at Chapel Hill Chapel Hill, NC, USA {kewang,dunn,jtighe,jmf}@cs.unc.edu
Combining Semantic Scene Priors and Haze Removal for Single Image Depth Estimation Ke Wang Enrique Dunn Joseph Tighe Jan-Michael Frahm University of North Carolina at Chapel Hill Chapel Hill, NC, USA {kewang,dunn,jtighe,jmf}@cs.unc.edu
arxiv: v1 [cs.cv] 3 Jul 2016
![arxiv: v1 [cs.cv] 3 Jul 2016](/thumbs/95/123101257.jpg "arxiv: v1 [cs.cv] 3 Jul 2016") A Coarse-to-Fine Indoor Layout Estimation (CFILE) Method Yuzhuo Ren, Chen Chen, Shangwen Li, and C.-C. Jay Kuo arxiv:1607.00598v1 [cs.cv] 3 Jul 2016 Abstract. The task of estimating the spatial layout
A Coarse-to-Fine Indoor Layout Estimation (CFILE) Method Yuzhuo Ren, Chen Chen, Shangwen Li, and C.-C. Jay Kuo arxiv:1607.00598v1 [cs.cv] 3 Jul 2016 Abstract. The task of estimating the spatial layout
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE
 SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
Single Image Super-resolution. Slides from Libin Geoffrey Sun and James Hays
 Single Image Super-resolution Slides from Libin Geoffrey Sun and James Hays Cs129 Computational Photography James Hays, Brown, fall 2012 Types of Super-resolution Multi-image (sub-pixel registration) Single-image
Single Image Super-resolution Slides from Libin Geoffrey Sun and James Hays Cs129 Computational Photography James Hays, Brown, fall 2012 Types of Super-resolution Multi-image (sub-pixel registration) Single-image
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
12/3/2009. What is Computer Vision? Applications. Application: Assisted driving Pedestrian and car detection. Application: Improving online search
 Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Contextual Classification with Functional Max-Margin Markov Networks
 Contextual Classification with Functional Max-Margin Markov Networks Dan Munoz Nicolas Vandapel Drew Bagnell Martial Hebert Geometry Estimation (Hoiem et al.) Sky Problem 3-D Point Cloud Classification
Contextual Classification with Functional Max-Margin Markov Networks Dan Munoz Nicolas Vandapel Drew Bagnell Martial Hebert Geometry Estimation (Hoiem et al.) Sky Problem 3-D Point Cloud Classification
More Single View Geometry
 More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Quiz: which is 1,2,3-point perspective Image
More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Quiz: which is 1,2,3-point perspective Image
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
LEARNING BOUNDARIES WITH COLOR AND DEPTH. Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen
 LEARNING BOUNDARIES WITH COLOR AND DEPTH Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen School of Electrical and Computer Engineering, Cornell University ABSTRACT To enable high-level understanding of a scene,
LEARNING BOUNDARIES WITH COLOR AND DEPTH Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen School of Electrical and Computer Engineering, Cornell University ABSTRACT To enable high-level understanding of a scene,
Parsing Indoor Scenes Using RGB-D Imagery
 Robotics: Science and Systems 2012 Sydney, NSW, Australia, July 09-13, 2012 Parsing Indoor Scenes Using RGB-D Imagery Camillo J. Taylor and Anthony Cowley GRASP Laboratory University of Pennsylvania Philadelphia,
Robotics: Science and Systems 2012 Sydney, NSW, Australia, July 09-13, 2012 Parsing Indoor Scenes Using RGB-D Imagery Camillo J. Taylor and Anthony Cowley GRASP Laboratory University of Pennsylvania Philadelphia,
Room Reconstruction from a Single Spherical Image by Higher-order Energy Minimization
 Room Reconstruction from a Single Spherical Image by Higher-order Energy Minimization Kosuke Fukano, Yoshihiko Mochizuki, Satoshi Iizuka, Edgar Simo-Serra, Akihiro Sugimoto, and Hiroshi Ishikawa Waseda
Room Reconstruction from a Single Spherical Image by Higher-order Energy Minimization Kosuke Fukano, Yoshihiko Mochizuki, Satoshi Iizuka, Edgar Simo-Serra, Akihiro Sugimoto, and Hiroshi Ishikawa Waseda
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
The Kinect Sensor. Luís Carriço FCUL 2014/15
 Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Linear combinations of simple classifiers for the PASCAL challenge
 Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Methods for Automatically Modeling and Representing As-built Building Information Models
 NSF GRANT # CMMI-0856558 NSF PROGRAM NAME: Automating the Creation of As-built Building Information Models Methods for Automatically Modeling and Representing As-built Building Information Models Daniel
NSF GRANT # CMMI-0856558 NSF PROGRAM NAME: Automating the Creation of As-built Building Information Models Methods for Automatically Modeling and Representing As-built Building Information Models Daniel
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
DEPTH MAP ESTIMATION FROM SINGLE-VIEW IMAGE USING OBJECT CLASSIFICATION BASED ON BAYESIAN LEARNING
 DEPTH MAP ESTIMATION FROM SINGLE-VIEW IMAGE USING OBJECT CLASSIFICATION BASED ON BAYESIAN LEARNING Jae-Il Jung and Yo-Sung Ho Gwangu Institute of Science and Technology (GIST) 261 Cheomdan-gwagiro, Buk-gu,
DEPTH MAP ESTIMATION FROM SINGLE-VIEW IMAGE USING OBJECT CLASSIFICATION BASED ON BAYESIAN LEARNING Jae-Il Jung and Yo-Sung Ho Gwangu Institute of Science and Technology (GIST) 261 Cheomdan-gwagiro, Buk-gu,
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
OCCLUSION BOUNDARIES ESTIMATION FROM A HIGH-RESOLUTION SAR IMAGE
 OCCLUSION BOUNDARIES ESTIMATION FROM A HIGH-RESOLUTION SAR IMAGE Wenju He, Marc Jäger, and Olaf Hellwich Berlin University of Technology FR3-1, Franklinstr. 28, 10587 Berlin, Germany {wenjuhe, jaeger,
OCCLUSION BOUNDARIES ESTIMATION FROM A HIGH-RESOLUTION SAR IMAGE Wenju He, Marc Jäger, and Olaf Hellwich Berlin University of Technology FR3-1, Franklinstr. 28, 10587 Berlin, Germany {wenjuhe, jaeger,
Introduction to 3D Concepts
 PART I Introduction to 3D Concepts Chapter 1 Scene... 3 Chapter 2 Rendering: OpenGL (OGL) and Adobe Ray Tracer (ART)...19 1 CHAPTER 1 Scene s0010 1.1. The 3D Scene p0010 A typical 3D scene has several
PART I Introduction to 3D Concepts Chapter 1 Scene... 3 Chapter 2 Rendering: OpenGL (OGL) and Adobe Ray Tracer (ART)...19 1 CHAPTER 1 Scene s0010 1.1. The 3D Scene p0010 A typical 3D scene has several
CMPSCI 670: Computer Vision! Image formation. University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji
 CMPSCI 670: Computer Vision! Image formation University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji MATLAB setup and tutorial Does everyone have access to MATLAB yet? EdLab accounts
CMPSCI 670: Computer Vision! Image formation University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji MATLAB setup and tutorial Does everyone have access to MATLAB yet? EdLab accounts
Self Lane Assignment Using Smart Mobile Camera For Intelligent GPS Navigation and Traffic Interpretation
 For Intelligent GPS Navigation and Traffic Interpretation Tianshi Gao Stanford University tianshig@stanford.edu 1. Introduction Imagine that you are driving on the highway at 70 mph and trying to figure
For Intelligent GPS Navigation and Traffic Interpretation Tianshi Gao Stanford University tianshig@stanford.edu 1. Introduction Imagine that you are driving on the highway at 70 mph and trying to figure
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Course Administration
 Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Perspective projection. A. Mantegna, Martyrdom of St. Christopher, c. 1450
 Perspective projection A. Mantegna, Martyrdom of St. Christopher, c. 1450 Overview of next two lectures The pinhole projection model Qualitative properties Perspective projection matrix Cameras with lenses
Perspective projection A. Mantegna, Martyrdom of St. Christopher, c. 1450 Overview of next two lectures The pinhole projection model Qualitative properties Perspective projection matrix Cameras with lenses
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Probabilistic Parameter Selection for Learning Scene Structure from Video
 Probabilistic Parameter Selection for Learning Scene Structure from Video M. D. Breitenstein 1 E. Sommerlade 2 B. Leibe 1 L. Van Gool 1 I. Reid 2 1 ETH Zurich, Switzerland 2 University of Oxford, UK Abstract
Probabilistic Parameter Selection for Learning Scene Structure from Video M. D. Breitenstein 1 E. Sommerlade 2 B. Leibe 1 L. Van Gool 1 I. Reid 2 1 ETH Zurich, Switzerland 2 University of Oxford, UK Abstract
CS381V Experiment Presentation. Chun-Chen Kuo
 CS381V Experiment Presentation Chun-Chen Kuo The Paper Indoor Segmentation and Support Inference from RGBD Images. N. Silberman, D. Hoiem, P. Kohli, and R. Fergus. ECCV 2012. 50 100 150 200 250 300 350
CS381V Experiment Presentation Chun-Chen Kuo The Paper Indoor Segmentation and Support Inference from RGBD Images. N. Silberman, D. Hoiem, P. Kohli, and R. Fergus. ECCV 2012. 50 100 150 200 250 300 350
Optimizing Monocular Cues for Depth Estimation from Indoor Images
 Optimizing Monocular Cues for Depth Estimation from Indoor Images Aditya Venkatraman 1, Sheetal Mahadik 2 1, 2 Department of Electronics and Telecommunication, ST Francis Institute of Technology, Mumbai,
Optimizing Monocular Cues for Depth Estimation from Indoor Images Aditya Venkatraman 1, Sheetal Mahadik 2 1, 2 Department of Electronics and Telecommunication, ST Francis Institute of Technology, Mumbai,
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
CSCI 4972/6963 Advanced Computer Graphics Quiz 2 Tuesday April 17, 2007 noon-1:30pm
 CSCI 4972/6963 Advanced Computer Graphics Quiz 2 Tuesday April 17, 2007 noon-1:30pm Name: RCS username: This quiz is closed book & closed notes except for one 8.5x11 (double-sided) sheet of notes. Please
CSCI 4972/6963 Advanced Computer Graphics Quiz 2 Tuesday April 17, 2007 noon-1:30pm Name: RCS username: This quiz is closed book & closed notes except for one 8.5x11 (double-sided) sheet of notes. Please
From 3D Scene Geometry to Human Workspace
 From 3D Scene Geometry to Human Workspace Abhinav Gupta, Scott Satkin, Alexei A. Efros and Martial Hebert The Robotics Institute, Carnegie Mellon University {abhinavg,ssatkin,efros,hebert}@ri.cmu.edu Abstract
From 3D Scene Geometry to Human Workspace Abhinav Gupta, Scott Satkin, Alexei A. Efros and Martial Hebert The Robotics Institute, Carnegie Mellon University {abhinavg,ssatkin,efros,hebert}@ri.cmu.edu Abstract
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Toward Coherent Object Detection And Scene Layout Understanding
 Toward Coherent Object Detection And Scene Layout Understanding Sid Ying-Ze Bao Min Sun Silvio Savarese Dept. of Electrical and Computer Engineering, University of Michigan at Ann Arbor, USA {yingze,sunmin,silvio}@eecs.umich.edu
Toward Coherent Object Detection And Scene Layout Understanding Sid Ying-Ze Bao Min Sun Silvio Savarese Dept. of Electrical and Computer Engineering, University of Michigan at Ann Arbor, USA {yingze,sunmin,silvio}@eecs.umich.edu
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Real-time Indoor Scene Understanding using Bayesian Filtering with Motion Cues
 Real-time Indoor Scene Understanding using Bayesian Filtering with Motion Cues Grace Tsai :, Changhai Xu ;, Jingen Liu :, Benjamin Kuipers : : Dept. of Electrical Engineering and Computer Science, University
Real-time Indoor Scene Understanding using Bayesian Filtering with Motion Cues Grace Tsai :, Changhai Xu ;, Jingen Liu :, Benjamin Kuipers : : Dept. of Electrical Engineering and Computer Science, University