Combinatorial Geometry & Topology arising in Game Theory and Optimization
|
|
|
- Ambrose Marsh
- 5 years ago
- Views:
Transcription
1 Combinatorial Geometry & Topology arising in Game Theory and Optimization Jesús A. De Loera University of California, Davis
2 LAST EPISODE... We discuss the content of the course...
y : 0 α 1} EXERCISE Prove or disprove: the image of a convex set under a linear transformation is again a convex")
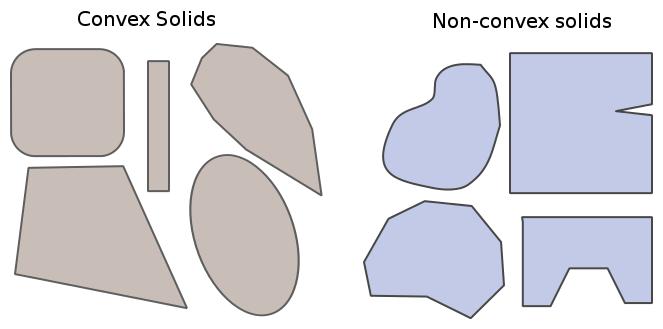
3 Convex Sets A set is CONVEX if it contains any line segment joining two of its points: NOT CONVEX CONVEX The line segment between x and y is given by [x, y] := {αx + (1 α)y : 0 α 1} EXERCISE Prove or disprove: the image of a convex set under a linear transformation is again a convex set.
4 Examples


5 TEST: Which of the following are convex sets? x 4 (z 1) 0 and x 2 (y 1) 0 and z 0 Proposition: The intersection of convex sets is always convex.
6 HYPERPLANES A linear functional f : R d R is given by a vector c R d, c 0. For a number α R we say that H α = {x R d : f (x) = α} is an affine hyperplane or hyperplane for short. The intersection of finitely many hyperplanes is an affine space. The affine hull of a set A is the smallest affine space containing A. Affine spaces are important examples of convex sets in particular because they allow us to speak about dimension: The dimension of an affine set is the largest number of affinely independent points in the set minus one. The dimension of a convex set in R d is the dimension of its affine hull.
7 HALF-SPACES A hyperplane divides R d into two halfspaces H + α = {x R d : f (x) α} and H α = {x R d : f (x) α}. Half-spaces are convex sets each denoted formally by a linear inequality: a 1 x 1 + a 2 x a d x d b
8 For a convex set S in R d. A linear inequality f (x) α is said to be valid on S if every point in S satisfies it. A set F S is a face of S if there exists a linear inequality f (x) α which is valid on P and such that F = {x P : f (x) = α}. The hyperplane defined by f is a supporting hyperplane of F. It defines a supporting half-space A face of dimension 0 is called a vertex. A face of dimension 1 is called an edge, and a face of dimension dim(p) 1 is called a facet.

9 Let K be a closed and bounded convex set in R d. Let x 0 / K. Then, There is a unique nearest point x1 of K to x 0. The hyperplane H through x1 orthogonal to x 1 x 0 is a supporting hyperplane of K. A hyperplane H red separates sets X and Y if and only if X and Y lie in different closed halfspaces of H. If X and Y lie in different open halfspaces, we say that H strictly separates X and Y.

10 CONVEX BODIES ARE INTERSECTION OF HALF-SPACES!!! Theorem A convex body K is the intersection of its closed supporting half-spaces. Theorem convex bodies are the sets of solutions of systems of LINEAR inequalities. WARNING: It may require infinitely many hyperplanes

11 POLYHEDRA: THE INTERSECTION OF FINITELY MANY HALF-SPACES
12 Examples d-dimensional unit cube C d = {x R d : 0 x i 1, i = 1..n} the (d 1)-dimensional standard simplex n 1 = {x R d : d x i = 1, x i 0}. i the d-dimensional cross-polytope d O n = {x R d : x i 1}. a simplotope is the Cartesian product of several simplices m1 m2 mr. i
13 SOLVABILITY OF SYSTEMS OF LINEAR INEQUALITIES Find a vector (x 1, x 2,..., x d ), satisfying: a 1,1 x 1 + a 1,2 x a 1,d x d b 1 a 2,1 x 1 + a 2,2 x a 2,d x d b 2. a k,1 x 1 + a k,2 x a k,d x d b k This is the Linear feasibility problem

14 Convex Sets are EVERYWHERE!


15 and ALTHOUGH not all sets in nature are convex!
, is the intersection of all the")

16 Convex Sets APPROXIMATE ALL SHAPES! Let A R d. The convex hull of A, denoted by conv(a), is the intersection of all the convex sets containing A. The smallest convex set that contains A. A polytope is the convex hull of a finite set of points in R d. It is the smallest convex set containing the points.
17 linear convex and conic combinations Definition: Given finitely many points A := {x 1, x 2,..., x n } we say the linear combination γ i x i is a conic combination is one P with all γi non-negative. an affine combination if γi = 1. a convex combination if it is affine and γi 0 for all i. Lemma: (EXERCISE) For a set of points A in R d we have that conv(a) equals all finite convex combinations of A: conv(a) = { x i A γ i x i : γ i 0 and γ γ k = 1} Definition A set of points x 1,..., x n is affinely dependent if there is a linear combination a i x i = 0 with a i = 0. Otherwise we say they are affinely independent. Lemma: A set of d + 2 or more points in R d is affinely dependent. Lemma: A set B R d is affinely independent every point has a unique representation as an affine combination of points in B. A k-dimensional simplex is the convex hull of k + 1 affinely independent points.


18 Weyl-Minkowski: How to represent the points of a polyhedron? There are TWO ways to represent a convex set: As the intersection of half-spaces OR as the convex/conic hull of extreme points. For polyhedra, even better!! Either as a finite system of inequalities or with finitely many generators.
19 Weyl-Minkowski Theorem Theorem: (Weyl-Minkowski s Theorem): For a polyhedral subset P of R d the following statements are equivalent: P is an H-polyhedron, i.e., P is given by a system of linear inequalities P = {x : Ax b}. P is a V-polyhedron, i.e., For finitely many vectors v1,..., v n and r 1,..., r s we can write P = conv(v 1, v 2,..., v n) + cone(r 1, r 2,..., r s) R + S denotes the Minkowski sum of two sets, R + S = {r + s : r R, s S}. There are algorithms for the conversion between the H-polyhedron and V-polyhedron. NOTE: Any cone can be decomposed into a pointed cone plus a linear space.
Convex Geometry arising in Optimization
 Convex Geometry arising in Optimization Jesús A. De Loera University of California, Davis Berlin Mathematical School Summer 2015 WHAT IS THIS COURSE ABOUT? Combinatorial Convexity and Optimization PLAN
Convex Geometry arising in Optimization Jesús A. De Loera University of California, Davis Berlin Mathematical School Summer 2015 WHAT IS THIS COURSE ABOUT? Combinatorial Convexity and Optimization PLAN
Lecture 2 - Introduction to Polytopes
 Lecture 2 - Introduction to Polytopes Optimization and Approximation - ENS M1 Nicolas Bousquet 1 Reminder of Linear Algebra definitions Let x 1,..., x m be points in R n and λ 1,..., λ m be real numbers.
Lecture 2 - Introduction to Polytopes Optimization and Approximation - ENS M1 Nicolas Bousquet 1 Reminder of Linear Algebra definitions Let x 1,..., x m be points in R n and λ 1,..., λ m be real numbers.
COMP331/557. Chapter 2: The Geometry of Linear Programming. (Bertsimas & Tsitsiklis, Chapter 2)
") COMP331/557 Chapter 2: The Geometry of Linear Programming (Bertsimas & Tsitsiklis, Chapter 2) 49 Polyhedra and Polytopes Definition 2.1. Let A 2 R m n and b 2 R m. a set {x 2 R n A x b} is called polyhedron
COMP331/557 Chapter 2: The Geometry of Linear Programming (Bertsimas & Tsitsiklis, Chapter 2) 49 Polyhedra and Polytopes Definition 2.1. Let A 2 R m n and b 2 R m. a set {x 2 R n A x b} is called polyhedron
ACTUALLY DOING IT : an Introduction to Polyhedral Computation
 ACTUALLY DOING IT : an Introduction to Polyhedral Computation Jesús A. De Loera Department of Mathematics Univ. of California, Davis http://www.math.ucdavis.edu/ deloera/ 1 What is a Convex Polytope? 2
ACTUALLY DOING IT : an Introduction to Polyhedral Computation Jesús A. De Loera Department of Mathematics Univ. of California, Davis http://www.math.ucdavis.edu/ deloera/ 1 What is a Convex Polytope? 2
Linear programming and duality theory
 Linear programming and duality theory Complements of Operations Research Giovanni Righini Linear Programming (LP) A linear program is defined by linear constraints, a linear objective function. Its variables
Linear programming and duality theory Complements of Operations Research Giovanni Righini Linear Programming (LP) A linear program is defined by linear constraints, a linear objective function. Its variables
Math 5593 Linear Programming Lecture Notes
 Math 5593 Linear Programming Lecture Notes Unit II: Theory & Foundations (Convex Analysis) University of Colorado Denver, Fall 2013 Topics 1 Convex Sets 1 1.1 Basic Properties (Luenberger-Ye Appendix B.1).........................
Math 5593 Linear Programming Lecture Notes Unit II: Theory & Foundations (Convex Analysis) University of Colorado Denver, Fall 2013 Topics 1 Convex Sets 1 1.1 Basic Properties (Luenberger-Ye Appendix B.1).........................
FACES OF CONVEX SETS
 FACES OF CONVEX SETS VERA ROSHCHINA Abstract. We remind the basic definitions of faces of convex sets and their basic properties. For more details see the classic references [1, 2] and [4] for polytopes.
FACES OF CONVEX SETS VERA ROSHCHINA Abstract. We remind the basic definitions of faces of convex sets and their basic properties. For more details see the classic references [1, 2] and [4] for polytopes.
Modeling and Analysis of Hybrid Systems
 Modeling and Analysis of Hybrid Systems Convex polyhedra Prof. Dr. Erika Ábrahám Informatik 2 - LuFG Theory of Hybrid Systems RWTH Aachen University Szeged, Hungary, 27 September - 06 October 2017 Ábrahám
Modeling and Analysis of Hybrid Systems Convex polyhedra Prof. Dr. Erika Ábrahám Informatik 2 - LuFG Theory of Hybrid Systems RWTH Aachen University Szeged, Hungary, 27 September - 06 October 2017 Ábrahám
Modeling and Analysis of Hybrid Systems
 Modeling and Analysis of Hybrid Systems 6. Convex polyhedra Prof. Dr. Erika Ábrahám Informatik 2 - LuFG Theory of Hybrid Systems RWTH Aachen University Szeged, Hungary, 27 September - 06 October 2017 Ábrahám
Modeling and Analysis of Hybrid Systems 6. Convex polyhedra Prof. Dr. Erika Ábrahám Informatik 2 - LuFG Theory of Hybrid Systems RWTH Aachen University Szeged, Hungary, 27 September - 06 October 2017 Ábrahám
maximize c, x subject to Ax b,
 Lecture 8 Linear programming is about problems of the form maximize c, x subject to Ax b, where A R m n, x R n, c R n, and b R m, and the inequality sign means inequality in each row. The feasible set
Lecture 8 Linear programming is about problems of the form maximize c, x subject to Ax b, where A R m n, x R n, c R n, and b R m, and the inequality sign means inequality in each row. The feasible set
4 LINEAR PROGRAMMING (LP) E. Amaldi Fondamenti di R.O. Politecnico di Milano 1
 E. Amaldi Fondamenti di R.O. Politecnico di Milano 1") 4 LINEAR PROGRAMMING (LP) E. Amaldi Fondamenti di R.O. Politecnico di Milano 1 Mathematical programming (optimization) problem: min f (x) s.t. x X R n set of feasible solutions with linear objective function
4 LINEAR PROGRAMMING (LP) E. Amaldi Fondamenti di R.O. Politecnico di Milano 1 Mathematical programming (optimization) problem: min f (x) s.t. x X R n set of feasible solutions with linear objective function
Applied Integer Programming
 Applied Integer Programming D.S. Chen; R.G. Batson; Y. Dang Fahimeh 8.2 8.7 April 21, 2015 Context 8.2. Convex sets 8.3. Describing a bounded polyhedron 8.4. Describing unbounded polyhedron 8.5. Faces,
Applied Integer Programming D.S. Chen; R.G. Batson; Y. Dang Fahimeh 8.2 8.7 April 21, 2015 Context 8.2. Convex sets 8.3. Describing a bounded polyhedron 8.4. Describing unbounded polyhedron 8.5. Faces,
Convexity: an introduction
 Convexity: an introduction Geir Dahl CMA, Dept. of Mathematics and Dept. of Informatics University of Oslo 1 / 74 1. Introduction 1. Introduction what is convexity where does it arise main concepts and
Convexity: an introduction Geir Dahl CMA, Dept. of Mathematics and Dept. of Informatics University of Oslo 1 / 74 1. Introduction 1. Introduction what is convexity where does it arise main concepts and
Chapter 4 Concepts from Geometry
 Chapter 4 Concepts from Geometry An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Line Segments The line segment between two points and in R n is the set of points on the straight line joining
Chapter 4 Concepts from Geometry An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Line Segments The line segment between two points and in R n is the set of points on the straight line joining
CS675: Convex and Combinatorial Optimization Spring 2018 Convex Sets. Instructor: Shaddin Dughmi
 CS675: Convex and Combinatorial Optimization Spring 2018 Convex Sets Instructor: Shaddin Dughmi Outline 1 Convex sets, Affine sets, and Cones 2 Examples of Convex Sets 3 Convexity-Preserving Operations
CS675: Convex and Combinatorial Optimization Spring 2018 Convex Sets Instructor: Shaddin Dughmi Outline 1 Convex sets, Affine sets, and Cones 2 Examples of Convex Sets 3 Convexity-Preserving Operations
Math 414 Lecture 2 Everyone have a laptop?
 Math 44 Lecture 2 Everyone have a laptop? THEOREM. Let v,...,v k be k vectors in an n-dimensional space and A = [v ;...; v k ] v,..., v k independent v,..., v k span the space v,..., v k a basis v,...,
Math 44 Lecture 2 Everyone have a laptop? THEOREM. Let v,...,v k be k vectors in an n-dimensional space and A = [v ;...; v k ] v,..., v k independent v,..., v k span the space v,..., v k a basis v,...,
Conic Duality. yyye
 Conic Linear Optimization and Appl. MS&E314 Lecture Note #02 1 Conic Duality Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A. http://www.stanford.edu/
Conic Linear Optimization and Appl. MS&E314 Lecture Note #02 1 Conic Duality Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A. http://www.stanford.edu/
Convex Hull Representation Conversion (cddlib, lrslib)
") Convex Hull Representation Conversion (cddlib, lrslib) Student Seminar in Combinatorics: Mathematical Software Niklas Pfister October 31, 2014 1 Introduction In this report we try to give a short overview
Convex Hull Representation Conversion (cddlib, lrslib) Student Seminar in Combinatorics: Mathematical Software Niklas Pfister October 31, 2014 1 Introduction In this report we try to give a short overview
POLYHEDRAL GEOMETRY. Convex functions and sets. Mathematical Programming Niels Lauritzen Recall that a subset C R n is convex if
 POLYHEDRAL GEOMETRY Mathematical Programming Niels Lauritzen 7.9.2007 Convex functions and sets Recall that a subset C R n is convex if {λx + (1 λ)y 0 λ 1} C for every x, y C and 0 λ 1. A function f :
POLYHEDRAL GEOMETRY Mathematical Programming Niels Lauritzen 7.9.2007 Convex functions and sets Recall that a subset C R n is convex if {λx + (1 λ)y 0 λ 1} C for every x, y C and 0 λ 1. A function f :
Polyhedral Computation Today s Topic: The Double Description Algorithm. Komei Fukuda Swiss Federal Institute of Technology Zurich October 29, 2010
 Polyhedral Computation Today s Topic: The Double Description Algorithm Komei Fukuda Swiss Federal Institute of Technology Zurich October 29, 2010 1 Convexity Review: Farkas-Type Alternative Theorems Gale
Polyhedral Computation Today s Topic: The Double Description Algorithm Komei Fukuda Swiss Federal Institute of Technology Zurich October 29, 2010 1 Convexity Review: Farkas-Type Alternative Theorems Gale
Polytopes Course Notes
 Polytopes Course Notes Carl W. Lee Department of Mathematics University of Kentucky Lexington, KY 40506 lee@ms.uky.edu Fall 2013 i Contents 1 Polytopes 1 1.1 Convex Combinations and V-Polytopes.....................
Polytopes Course Notes Carl W. Lee Department of Mathematics University of Kentucky Lexington, KY 40506 lee@ms.uky.edu Fall 2013 i Contents 1 Polytopes 1 1.1 Convex Combinations and V-Polytopes.....................
Linear Programming in Small Dimensions
 Linear Programming in Small Dimensions Lekcija 7 sergio.cabello@fmf.uni-lj.si FMF Univerza v Ljubljani Edited from slides by Antoine Vigneron Outline linear programming, motivation and definition one dimensional
Linear Programming in Small Dimensions Lekcija 7 sergio.cabello@fmf.uni-lj.si FMF Univerza v Ljubljani Edited from slides by Antoine Vigneron Outline linear programming, motivation and definition one dimensional
DM545 Linear and Integer Programming. Lecture 2. The Simplex Method. Marco Chiarandini
 DM545 Linear and Integer Programming Lecture 2 The Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark Outline 1. 2. 3. 4. Standard Form Basic Feasible Solutions
DM545 Linear and Integer Programming Lecture 2 The Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark Outline 1. 2. 3. 4. Standard Form Basic Feasible Solutions
Polyhedral Computation and their Applications. Jesús A. De Loera Univ. of California, Davis
 Polyhedral Computation and their Applications Jesús A. De Loera Univ. of California, Davis 1 1 Introduction It is indeniable that convex polyhedral geometry is an important tool of modern mathematics.
Polyhedral Computation and their Applications Jesús A. De Loera Univ. of California, Davis 1 1 Introduction It is indeniable that convex polyhedral geometry is an important tool of modern mathematics.
ORIE 6300 Mathematical Programming I September 2, Lecture 3
 ORIE 6300 Mathematical Programming I September 2, 2014 Lecturer: David P. Williamson Lecture 3 Scribe: Divya Singhvi Last time we discussed how to take dual of an LP in two different ways. Today we will
ORIE 6300 Mathematical Programming I September 2, 2014 Lecturer: David P. Williamson Lecture 3 Scribe: Divya Singhvi Last time we discussed how to take dual of an LP in two different ways. Today we will
Numerical Optimization
 Convex Sets Computer Science and Automation Indian Institute of Science Bangalore 560 012, India. NPTEL Course on Let x 1, x 2 R n, x 1 x 2. Line and line segment Line passing through x 1 and x 2 : {y
Convex Sets Computer Science and Automation Indian Institute of Science Bangalore 560 012, India. NPTEL Course on Let x 1, x 2 R n, x 1 x 2. Line and line segment Line passing through x 1 and x 2 : {y
MA4254: Discrete Optimization. Defeng Sun. Department of Mathematics National University of Singapore Office: S Telephone:
 MA4254: Discrete Optimization Defeng Sun Department of Mathematics National University of Singapore Office: S14-04-25 Telephone: 6516 3343 Aims/Objectives: Discrete optimization deals with problems of
MA4254: Discrete Optimization Defeng Sun Department of Mathematics National University of Singapore Office: S14-04-25 Telephone: 6516 3343 Aims/Objectives: Discrete optimization deals with problems of
Lecture 4: Rational IPs, Polyhedron, Decomposition Theorem
 IE 5: Integer Programming, Spring 29 24 Jan, 29 Lecture 4: Rational IPs, Polyhedron, Decomposition Theorem Lecturer: Karthik Chandrasekaran Scribe: Setareh Taki Disclaimer: These notes have not been subjected
IE 5: Integer Programming, Spring 29 24 Jan, 29 Lecture 4: Rational IPs, Polyhedron, Decomposition Theorem Lecturer: Karthik Chandrasekaran Scribe: Setareh Taki Disclaimer: These notes have not been subjected
Advanced Operations Research Techniques IE316. Quiz 1 Review. Dr. Ted Ralphs
 Advanced Operations Research Techniques IE316 Quiz 1 Review Dr. Ted Ralphs IE316 Quiz 1 Review 1 Reading for The Quiz Material covered in detail in lecture. 1.1, 1.4, 2.1-2.6, 3.1-3.3, 3.5 Background material
Advanced Operations Research Techniques IE316 Quiz 1 Review Dr. Ted Ralphs IE316 Quiz 1 Review 1 Reading for The Quiz Material covered in detail in lecture. 1.1, 1.4, 2.1-2.6, 3.1-3.3, 3.5 Background material
What is a cone? Anastasia Chavez. Field of Dreams Conference President s Postdoctoral Fellow NSF Postdoctoral Fellow UC Davis
 What is a cone? Anastasia Chavez President s Postdoctoral Fellow NSF Postdoctoral Fellow UC Davis Field of Dreams Conference 2018 Roadmap for today 1 Cones 2 Vertex/Ray Description 3 Hyperplane Description
What is a cone? Anastasia Chavez President s Postdoctoral Fellow NSF Postdoctoral Fellow UC Davis Field of Dreams Conference 2018 Roadmap for today 1 Cones 2 Vertex/Ray Description 3 Hyperplane Description
CS599: Convex and Combinatorial Optimization Fall 2013 Lecture 4: Convex Sets. Instructor: Shaddin Dughmi
 CS599: Convex and Combinatorial Optimization Fall 2013 Lecture 4: Convex Sets Instructor: Shaddin Dughmi Announcements New room: KAP 158 Today: Convex Sets Mostly from Boyd and Vandenberghe. Read all of
CS599: Convex and Combinatorial Optimization Fall 2013 Lecture 4: Convex Sets Instructor: Shaddin Dughmi Announcements New room: KAP 158 Today: Convex Sets Mostly from Boyd and Vandenberghe. Read all of
Polar Duality and Farkas Lemma
 Lecture 3 Polar Duality and Farkas Lemma October 8th, 2004 Lecturer: Kamal Jain Notes: Daniel Lowd 3.1 Polytope = bounded polyhedron Last lecture, we were attempting to prove the Minkowsky-Weyl Theorem:
Lecture 3 Polar Duality and Farkas Lemma October 8th, 2004 Lecturer: Kamal Jain Notes: Daniel Lowd 3.1 Polytope = bounded polyhedron Last lecture, we were attempting to prove the Minkowsky-Weyl Theorem:
Lecture 5: Properties of convex sets
 Lecture 5: Properties of convex sets Rajat Mittal IIT Kanpur This week we will see properties of convex sets. These properties make convex sets special and are the reason why convex optimization problems
Lecture 5: Properties of convex sets Rajat Mittal IIT Kanpur This week we will see properties of convex sets. These properties make convex sets special and are the reason why convex optimization problems
11 Linear Programming
 11 Linear Programming 11.1 Definition and Importance The final topic in this course is Linear Programming. We say that a problem is an instance of linear programming when it can be effectively expressed
11 Linear Programming 11.1 Definition and Importance The final topic in this course is Linear Programming. We say that a problem is an instance of linear programming when it can be effectively expressed
Lecture 2 Convex Sets
 Optimization Theory and Applications Lecture 2 Convex Sets Prof. Chun-Hung Liu Dept. of Electrical and Computer Engineering National Chiao Tung University Fall 2016 2016/9/29 Lecture 2: Convex Sets 1 Outline
Optimization Theory and Applications Lecture 2 Convex Sets Prof. Chun-Hung Liu Dept. of Electrical and Computer Engineering National Chiao Tung University Fall 2016 2016/9/29 Lecture 2: Convex Sets 1 Outline
be a polytope. has such a representation iff it contains the origin in its interior. For a generic, sort the inequalities so that
 ( Shelling (Bruggesser-Mani 1971) and Ranking Let be a polytope. has such a representation iff it contains the origin in its interior. For a generic, sort the inequalities so that. a ranking of vertices
( Shelling (Bruggesser-Mani 1971) and Ranking Let be a polytope. has such a representation iff it contains the origin in its interior. For a generic, sort the inequalities so that. a ranking of vertices
Lecture 2: August 29, 2018
 10-725/36-725: Convex Optimization Fall 2018 Lecturer: Ryan Tibshirani Lecture 2: August 29, 2018 Scribes: Adam Harley Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These notes have
10-725/36-725: Convex Optimization Fall 2018 Lecturer: Ryan Tibshirani Lecture 2: August 29, 2018 Scribes: Adam Harley Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These notes have
EC 521 MATHEMATICAL METHODS FOR ECONOMICS. Lecture 2: Convex Sets
 EC 51 MATHEMATICAL METHODS FOR ECONOMICS Lecture : Convex Sets Murat YILMAZ Boğaziçi University In this section, we focus on convex sets, separating hyperplane theorems and Farkas Lemma. And as an application
EC 51 MATHEMATICAL METHODS FOR ECONOMICS Lecture : Convex Sets Murat YILMAZ Boğaziçi University In this section, we focus on convex sets, separating hyperplane theorems and Farkas Lemma. And as an application
Lecture 2. Topology of Sets in R n. August 27, 2008
 Lecture 2 Topology of Sets in R n August 27, 2008 Outline Vectors, Matrices, Norms, Convergence Open and Closed Sets Special Sets: Subspace, Affine Set, Cone, Convex Set Special Convex Sets: Hyperplane,
Lecture 2 Topology of Sets in R n August 27, 2008 Outline Vectors, Matrices, Norms, Convergence Open and Closed Sets Special Sets: Subspace, Affine Set, Cone, Convex Set Special Convex Sets: Hyperplane,
Integer Programming Theory
 Integer Programming Theory Laura Galli October 24, 2016 In the following we assume all functions are linear, hence we often drop the term linear. In discrete optimization, we seek to find a solution x
Integer Programming Theory Laura Galli October 24, 2016 In the following we assume all functions are linear, hence we often drop the term linear. In discrete optimization, we seek to find a solution x
Lecture 3. Corner Polyhedron, Intersection Cuts, Maximal Lattice-Free Convex Sets. Tepper School of Business Carnegie Mellon University, Pittsburgh
 Lecture 3 Corner Polyhedron, Intersection Cuts, Maximal Lattice-Free Convex Sets Gérard Cornuéjols Tepper School of Business Carnegie Mellon University, Pittsburgh January 2016 Mixed Integer Linear Programming
Lecture 3 Corner Polyhedron, Intersection Cuts, Maximal Lattice-Free Convex Sets Gérard Cornuéjols Tepper School of Business Carnegie Mellon University, Pittsburgh January 2016 Mixed Integer Linear Programming
LECTURE 10 LECTURE OUTLINE
 We now introduce a new concept with important theoretical and algorithmic implications: polyhedral convexity, extreme points, and related issues. LECTURE 1 LECTURE OUTLINE Polar cones and polar cone theorem
We now introduce a new concept with important theoretical and algorithmic implications: polyhedral convexity, extreme points, and related issues. LECTURE 1 LECTURE OUTLINE Polar cones and polar cone theorem
Lecture 3: Convex sets
 Lecture 3: Convex sets Rajat Mittal IIT Kanpur We denote the set of real numbers as R. Most of the time we will be working with space R n and its elements will be called vectors. Remember that a subspace
Lecture 3: Convex sets Rajat Mittal IIT Kanpur We denote the set of real numbers as R. Most of the time we will be working with space R n and its elements will be called vectors. Remember that a subspace
Mathematical Programming and Research Methods (Part II)
") Mathematical Programming and Research Methods (Part II) 4. Convexity and Optimization Massimiliano Pontil (based on previous lecture by Andreas Argyriou) 1 Today s Plan Convex sets and functions Types
Mathematical Programming and Research Methods (Part II) 4. Convexity and Optimization Massimiliano Pontil (based on previous lecture by Andreas Argyriou) 1 Today s Plan Convex sets and functions Types
AMS : Combinatorial Optimization Homework Problems - Week V
 AMS 553.766: Combinatorial Optimization Homework Problems - Week V For the following problems, A R m n will be m n matrices, and b R m. An affine subspace is the set of solutions to a a system of linear
AMS 553.766: Combinatorial Optimization Homework Problems - Week V For the following problems, A R m n will be m n matrices, and b R m. An affine subspace is the set of solutions to a a system of linear
On the Hardness of Computing Intersection, Union and Minkowski Sum of Polytopes
 On the Hardness of Computing Intersection, Union and Minkowski Sum of Polytopes Hans Raj Tiwary hansraj@cs.uni-sb.de FR Informatik Universität des Saarlandes D-66123 Saarbrücken, Germany Tel: +49 681 3023235
On the Hardness of Computing Intersection, Union and Minkowski Sum of Polytopes Hans Raj Tiwary hansraj@cs.uni-sb.de FR Informatik Universität des Saarlandes D-66123 Saarbrücken, Germany Tel: +49 681 3023235
MATH 890 HOMEWORK 2 DAVID MEREDITH
 MATH 890 HOMEWORK 2 DAVID MEREDITH (1) Suppose P and Q are polyhedra. Then P Q is a polyhedron. Moreover if P and Q are polytopes then P Q is a polytope. The facets of P Q are either F Q where F is a facet
MATH 890 HOMEWORK 2 DAVID MEREDITH (1) Suppose P and Q are polyhedra. Then P Q is a polyhedron. Moreover if P and Q are polytopes then P Q is a polytope. The facets of P Q are either F Q where F is a facet
COM Optimization for Communications Summary: Convex Sets and Convex Functions
 1 Convex Sets Affine Sets COM524500 Optimization for Communications Summary: Convex Sets and Convex Functions A set C R n is said to be affine if A point x 1, x 2 C = θx 1 + (1 θ)x 2 C, θ R (1) y = k θ
1 Convex Sets Affine Sets COM524500 Optimization for Communications Summary: Convex Sets and Convex Functions A set C R n is said to be affine if A point x 1, x 2 C = θx 1 + (1 θ)x 2 C, θ R (1) y = k θ
15-451/651: Design & Analysis of Algorithms October 11, 2018 Lecture #13: Linear Programming I last changed: October 9, 2018
 15-451/651: Design & Analysis of Algorithms October 11, 2018 Lecture #13: Linear Programming I last changed: October 9, 2018 In this lecture, we describe a very general problem called linear programming
15-451/651: Design & Analysis of Algorithms October 11, 2018 Lecture #13: Linear Programming I last changed: October 9, 2018 In this lecture, we describe a very general problem called linear programming
CS 372: Computational Geometry Lecture 10 Linear Programming in Fixed Dimension
 CS 372: Computational Geometry Lecture 10 Linear Programming in Fixed Dimension Antoine Vigneron King Abdullah University of Science and Technology November 7, 2012 Antoine Vigneron (KAUST) CS 372 Lecture
CS 372: Computational Geometry Lecture 10 Linear Programming in Fixed Dimension Antoine Vigneron King Abdullah University of Science and Technology November 7, 2012 Antoine Vigneron (KAUST) CS 372 Lecture
arxiv: v1 [math.co] 15 Dec 2009
![arxiv: v1 [math.co] 15 Dec 2009](/thumbs/93/112153607.jpg "arxiv: v1 [math.co] 15 Dec 2009") ANOTHER PROOF OF THE FACT THAT POLYHEDRAL CONES ARE FINITELY GENERATED arxiv:092.2927v [math.co] 5 Dec 2009 VOLKER KAIBEL Abstract. In this note, we work out a simple inductive proof showing that every
ANOTHER PROOF OF THE FACT THAT POLYHEDRAL CONES ARE FINITELY GENERATED arxiv:092.2927v [math.co] 5 Dec 2009 VOLKER KAIBEL Abstract. In this note, we work out a simple inductive proof showing that every
Linear Programming and its Applications
 Linear Programming and its Applications Outline for Today What is linear programming (LP)? Examples Formal definition Geometric intuition Why is LP useful? A first look at LP algorithms Duality Linear
Linear Programming and its Applications Outline for Today What is linear programming (LP)? Examples Formal definition Geometric intuition Why is LP useful? A first look at LP algorithms Duality Linear
Convex Optimization. Chapter 1 - chapter 2.2
 Convex Optimization Chapter 1 - chapter 2.2 Introduction In optimization literatures, one will frequently encounter terms like linear programming, convex set convex cone, convex hull, semidefinite cone
Convex Optimization Chapter 1 - chapter 2.2 Introduction In optimization literatures, one will frequently encounter terms like linear programming, convex set convex cone, convex hull, semidefinite cone
3. The Simplex algorithmn The Simplex algorithmn 3.1 Forms of linear programs
 11 3.1 Forms of linear programs... 12 3.2 Basic feasible solutions... 13 3.3 The geometry of linear programs... 14 3.4 Local search among basic feasible solutions... 15 3.5 Organization in tableaus...
11 3.1 Forms of linear programs... 12 3.2 Basic feasible solutions... 13 3.3 The geometry of linear programs... 14 3.4 Local search among basic feasible solutions... 15 3.5 Organization in tableaus...
A PROOF OF THE LOWER BOUND CONJECTURE FOR CONVEX POLYTOPES
 PACIFIC JOURNAL OF MATHEMATICS Vol. 46, No. 2, 1973 A PROOF OF THE LOWER BOUND CONJECTURE FOR CONVEX POLYTOPES DAVID BARNETTE A d polytope is defined to be a cz-dimensional set that is the convex hull
PACIFIC JOURNAL OF MATHEMATICS Vol. 46, No. 2, 1973 A PROOF OF THE LOWER BOUND CONJECTURE FOR CONVEX POLYTOPES DAVID BARNETTE A d polytope is defined to be a cz-dimensional set that is the convex hull
We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance.
 Solid geometry We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance. First, note that everything we have proven for the
Solid geometry We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance. First, note that everything we have proven for the
Lecture 4: Linear Programming
 COMP36111: Advanced Algorithms I Lecture 4: Linear Programming Ian Pratt-Hartmann Room KB2.38: email: ipratt@cs.man.ac.uk 2017 18 Outline The Linear Programming Problem Geometrical analysis The Simplex
COMP36111: Advanced Algorithms I Lecture 4: Linear Programming Ian Pratt-Hartmann Room KB2.38: email: ipratt@cs.man.ac.uk 2017 18 Outline The Linear Programming Problem Geometrical analysis The Simplex
Circuit Walks in Integral Polyhedra
 Circuit Walks in Integral Polyhedra Charles Viss Steffen Borgwardt University of Colorado Denver Optimization and Discrete Geometry: Theory and Practice Tel Aviv University, April 2018 LINEAR PROGRAMMING
Circuit Walks in Integral Polyhedra Charles Viss Steffen Borgwardt University of Colorado Denver Optimization and Discrete Geometry: Theory and Practice Tel Aviv University, April 2018 LINEAR PROGRAMMING
Linear programming and the efficiency of the simplex algorithm for transportation polytopes
 Linear programming and the efficiency of the simplex algorithm for transportation polytopes Edward D. Kim University of Wisconsin-La Crosse February 20, 2015 Loras College Department of Mathematics Colloquium
Linear programming and the efficiency of the simplex algorithm for transportation polytopes Edward D. Kim University of Wisconsin-La Crosse February 20, 2015 Loras College Department of Mathematics Colloquium
arxiv: v1 [math.co] 12 Dec 2017
![arxiv: v1 [math.co] 12 Dec 2017](/thumbs/76/73466018.jpg "arxiv: v1 [math.co] 12 Dec 2017") arxiv:1712.04381v1 [math.co] 12 Dec 2017 Semi-reflexive polytopes Tiago Royer Abstract The Ehrhart function L P(t) of a polytope P is usually defined only for integer dilation arguments t. By allowing
arxiv:1712.04381v1 [math.co] 12 Dec 2017 Semi-reflexive polytopes Tiago Royer Abstract The Ehrhart function L P(t) of a polytope P is usually defined only for integer dilation arguments t. By allowing
Convex Optimization. 2. Convex Sets. Prof. Ying Cui. Department of Electrical Engineering Shanghai Jiao Tong University. SJTU Ying Cui 1 / 33
 Convex Optimization 2. Convex Sets Prof. Ying Cui Department of Electrical Engineering Shanghai Jiao Tong University 2018 SJTU Ying Cui 1 / 33 Outline Affine and convex sets Some important examples Operations
Convex Optimization 2. Convex Sets Prof. Ying Cui Department of Electrical Engineering Shanghai Jiao Tong University 2018 SJTU Ying Cui 1 / 33 Outline Affine and convex sets Some important examples Operations
Lecture 6: Faces, Facets
 IE 511: Integer Programming, Spring 2019 31 Jan, 2019 Lecturer: Karthik Chandrasekaran Lecture 6: Faces, Facets Scribe: Setareh Taki Disclaimer: These notes have not been subjected to the usual scrutiny
IE 511: Integer Programming, Spring 2019 31 Jan, 2019 Lecturer: Karthik Chandrasekaran Lecture 6: Faces, Facets Scribe: Setareh Taki Disclaimer: These notes have not been subjected to the usual scrutiny
Simplex Algorithm in 1 Slide
 Administrivia 1 Canonical form: Simplex Algorithm in 1 Slide If we do pivot in A r,s >0, where c s
Administrivia 1 Canonical form: Simplex Algorithm in 1 Slide If we do pivot in A r,s >0, where c s
Convex Optimization - Chapter 1-2. Xiangru Lian August 28, 2015
 Convex Optimization - Chapter 1-2 Xiangru Lian August 28, 2015 1 Mathematical optimization minimize f 0 (x) s.t. f j (x) 0, j=1,,m, (1) x S x. (x 1,,x n ). optimization variable. f 0. R n R. objective
Convex Optimization - Chapter 1-2 Xiangru Lian August 28, 2015 1 Mathematical optimization minimize f 0 (x) s.t. f j (x) 0, j=1,,m, (1) x S x. (x 1,,x n ). optimization variable. f 0. R n R. objective
However, this is not always true! For example, this fails if both A and B are closed and unbounded (find an example).
.") 98 CHAPTER 3. PROPERTIES OF CONVEX SETS: A GLIMPSE 3.2 Separation Theorems It seems intuitively rather obvious that if A and B are two nonempty disjoint convex sets in A 2, then there is a line, H, separating
98 CHAPTER 3. PROPERTIES OF CONVEX SETS: A GLIMPSE 3.2 Separation Theorems It seems intuitively rather obvious that if A and B are two nonempty disjoint convex sets in A 2, then there is a line, H, separating
CS522: Advanced Algorithms
 Lecture 1 CS5: Advanced Algorithms October 4, 004 Lecturer: Kamal Jain Notes: Chris Re 1.1 Plan for the week Figure 1.1: Plan for the week The underlined tools, weak duality theorem and complimentary slackness,
Lecture 1 CS5: Advanced Algorithms October 4, 004 Lecturer: Kamal Jain Notes: Chris Re 1.1 Plan for the week Figure 1.1: Plan for the week The underlined tools, weak duality theorem and complimentary slackness,
Lecture 4: Convexity
 10-725: Convex Optimization Fall 2013 Lecture 4: Convexity Lecturer: Barnabás Póczos Scribes: Jessica Chemali, David Fouhey, Yuxiong Wang Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer:
10-725: Convex Optimization Fall 2013 Lecture 4: Convexity Lecturer: Barnabás Póczos Scribes: Jessica Chemali, David Fouhey, Yuxiong Wang Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer:
CS 473: Algorithms. Ruta Mehta. Spring University of Illinois, Urbana-Champaign. Ruta (UIUC) CS473 1 Spring / 29
 CS473 1 Spring / 29") CS 473: Algorithms Ruta Mehta University of Illinois, Urbana-Champaign Spring 2018 Ruta (UIUC) CS473 1 Spring 2018 1 / 29 CS 473: Algorithms, Spring 2018 Simplex and LP Duality Lecture 19 March 29, 2018
CS 473: Algorithms Ruta Mehta University of Illinois, Urbana-Champaign Spring 2018 Ruta (UIUC) CS473 1 Spring 2018 1 / 29 CS 473: Algorithms, Spring 2018 Simplex and LP Duality Lecture 19 March 29, 2018
A mini-introduction to convexity
 A mini-introduction to convexity Geir Dahl March 14, 2017 1 Introduction Convexity, or convex analysis, is an area of mathematics where one studies questions related to two basic objects, namely convex
A mini-introduction to convexity Geir Dahl March 14, 2017 1 Introduction Convexity, or convex analysis, is an area of mathematics where one studies questions related to two basic objects, namely convex
CS 473: Algorithms. Ruta Mehta. Spring University of Illinois, Urbana-Champaign. Ruta (UIUC) CS473 1 Spring / 50
 CS473 1 Spring / 50") CS 473: Algorithms Ruta Mehta University of Illinois, Urbana-Champaign Spring 2018 Ruta (UIUC) CS473 1 Spring 2018 1 / 50 CS 473: Algorithms, Spring 2018 Introduction to Linear Programming Lecture 18 March
CS 473: Algorithms Ruta Mehta University of Illinois, Urbana-Champaign Spring 2018 Ruta (UIUC) CS473 1 Spring 2018 1 / 50 CS 473: Algorithms, Spring 2018 Introduction to Linear Programming Lecture 18 March
A Course in Convexity
 A Course in Convexity Alexander Barvinok Graduate Studies in Mathematics Volume 54 American Mathematical Society Providence, Rhode Island Preface vii Chapter I. Convex Sets at Large 1 1. Convex Sets. Main
A Course in Convexity Alexander Barvinok Graduate Studies in Mathematics Volume 54 American Mathematical Society Providence, Rhode Island Preface vii Chapter I. Convex Sets at Large 1 1. Convex Sets. Main
Discrete Optimization 2010 Lecture 5 Min-Cost Flows & Total Unimodularity
 Discrete Optimization 2010 Lecture 5 Min-Cost Flows & Total Unimodularity Marc Uetz University of Twente m.uetz@utwente.nl Lecture 5: sheet 1 / 26 Marc Uetz Discrete Optimization Outline 1 Min-Cost Flows
Discrete Optimization 2010 Lecture 5 Min-Cost Flows & Total Unimodularity Marc Uetz University of Twente m.uetz@utwente.nl Lecture 5: sheet 1 / 26 Marc Uetz Discrete Optimization Outline 1 Min-Cost Flows
Lecture 2: August 29, 2018
 10-725/36-725: Convex Optimization Fall 2018 Lecturer: Ryan Tibshirani Lecture 2: August 29, 2018 Scribes: Yingjing Lu, Adam Harley, Ruosong Wang Note: LaTeX template courtesy of UC Berkeley EECS dept.
10-725/36-725: Convex Optimization Fall 2018 Lecturer: Ryan Tibshirani Lecture 2: August 29, 2018 Scribes: Yingjing Lu, Adam Harley, Ruosong Wang Note: LaTeX template courtesy of UC Berkeley EECS dept.
Lecture 2: August 31
 10-725/36-725: Convex Optimization Fall 2016 Lecture 2: August 31 Lecturer: Lecturer: Ryan Tibshirani Scribes: Scribes: Lidan Mu, Simon Du, Binxuan Huang 2.1 Review A convex optimization problem is of
10-725/36-725: Convex Optimization Fall 2016 Lecture 2: August 31 Lecturer: Lecturer: Ryan Tibshirani Scribes: Scribes: Lidan Mu, Simon Du, Binxuan Huang 2.1 Review A convex optimization problem is of
IE 5531: Engineering Optimization I
 IE 5531: Engineering Optimization I Lecture 3: Linear Programming, Continued Prof. John Gunnar Carlsson September 15, 2010 Prof. John Gunnar Carlsson IE 5531: Engineering Optimization I September 15, 2010
IE 5531: Engineering Optimization I Lecture 3: Linear Programming, Continued Prof. John Gunnar Carlsson September 15, 2010 Prof. John Gunnar Carlsson IE 5531: Engineering Optimization I September 15, 2010
Chapter 15 Introduction to Linear Programming
 Chapter 15 Introduction to Linear Programming An Introduction to Optimization Spring, 2015 Wei-Ta Chu 1 Brief History of Linear Programming The goal of linear programming is to determine the values of
Chapter 15 Introduction to Linear Programming An Introduction to Optimization Spring, 2015 Wei-Ta Chu 1 Brief History of Linear Programming The goal of linear programming is to determine the values of
Convex sets and convex functions
 Convex sets and convex functions Convex optimization problems Convex sets and their examples Separating and supporting hyperplanes Projections on convex sets Convex functions, conjugate functions ECE 602,
Convex sets and convex functions Convex optimization problems Convex sets and their examples Separating and supporting hyperplanes Projections on convex sets Convex functions, conjugate functions ECE 602,
Lecture notes on the simplex method September We will present an algorithm to solve linear programs of the form. maximize.
 Cornell University, Fall 2017 CS 6820: Algorithms Lecture notes on the simplex method September 2017 1 The Simplex Method We will present an algorithm to solve linear programs of the form maximize subject
Cornell University, Fall 2017 CS 6820: Algorithms Lecture notes on the simplex method September 2017 1 The Simplex Method We will present an algorithm to solve linear programs of the form maximize subject
Three Dimensional Geometry. Linear Programming
 Three Dimensional Geometry Linear Programming A plane is determined uniquely if any one of the following is known: The normal to the plane and its distance from the origin is given, i.e. equation of a
Three Dimensional Geometry Linear Programming A plane is determined uniquely if any one of the following is known: The normal to the plane and its distance from the origin is given, i.e. equation of a
Convex sets and convex functions
 Convex sets and convex functions Convex optimization problems Convex sets and their examples Separating and supporting hyperplanes Projections on convex sets Convex functions, conjugate functions ECE 602,
Convex sets and convex functions Convex optimization problems Convex sets and their examples Separating and supporting hyperplanes Projections on convex sets Convex functions, conjugate functions ECE 602,
7. The Gauss-Bonnet theorem
 7. The Gauss-Bonnet theorem 7.1 Hyperbolic polygons In Euclidean geometry, an n-sided polygon is a subset of the Euclidean plane bounded by n straight lines. Thus the edges of a Euclidean polygon are formed
7. The Gauss-Bonnet theorem 7.1 Hyperbolic polygons In Euclidean geometry, an n-sided polygon is a subset of the Euclidean plane bounded by n straight lines. Thus the edges of a Euclidean polygon are formed
4 Linear Programming (LP) E. Amaldi -- Foundations of Operations Research -- Politecnico di Milano 1
 E. Amaldi -- Foundations of Operations Research -- Politecnico di Milano 1") 4 Linear Programming (LP) E. Amaldi -- Foundations of Operations Research -- Politecnico di Milano 1 Definition: A Linear Programming (LP) problem is an optimization problem: where min f () s.t. X n the
4 Linear Programming (LP) E. Amaldi -- Foundations of Operations Research -- Politecnico di Milano 1 Definition: A Linear Programming (LP) problem is an optimization problem: where min f () s.t. X n the
Lectures on Discrete Geometry
 Jiří Matoušek Lectures on Discrete Geometry Excerpt Springer-Verlag Berlin Heidelberg NewYork London Paris Tokyo Hong Kong Barcelona Budapest Contents Notation and Terminology iii 1 Convexity 1 1.1 Linear
Jiří Matoušek Lectures on Discrete Geometry Excerpt Springer-Verlag Berlin Heidelberg NewYork London Paris Tokyo Hong Kong Barcelona Budapest Contents Notation and Terminology iii 1 Convexity 1 1.1 Linear
COMPUTATIONAL GEOMETRY
 Thursday, September 20, 2007 (Ming C. Lin) Review on Computational Geometry & Collision Detection for Convex Polytopes COMPUTATIONAL GEOMETRY (Refer to O'Rourke's and Dutch textbook ) 1. Extreme Points
Thursday, September 20, 2007 (Ming C. Lin) Review on Computational Geometry & Collision Detection for Convex Polytopes COMPUTATIONAL GEOMETRY (Refer to O'Rourke's and Dutch textbook ) 1. Extreme Points
Lecture 5: Duality Theory
 Lecture 5: Duality Theory Rajat Mittal IIT Kanpur The objective of this lecture note will be to learn duality theory of linear programming. We are planning to answer following questions. What are hyperplane
Lecture 5: Duality Theory Rajat Mittal IIT Kanpur The objective of this lecture note will be to learn duality theory of linear programming. We are planning to answer following questions. What are hyperplane
EE/ACM Applications of Convex Optimization in Signal Processing and Communications Lecture 6
 EE/ACM 150 - Applications of Convex Optimization in Signal Processing and Communications Lecture 6 Andre Tkacenko Signal Processing Research Group Jet Propulsion Laboratory April 19, 2012 Andre Tkacenko
EE/ACM 150 - Applications of Convex Optimization in Signal Processing and Communications Lecture 6 Andre Tkacenko Signal Processing Research Group Jet Propulsion Laboratory April 19, 2012 Andre Tkacenko
Interval-Vector Polytopes
 Interval-Vector Polytopes Jessica De Silva Gabriel Dorfsman-Hopkins California State University, Stanislaus Dartmouth College Joseph Pruitt California State University, Long Beach July 28, 2012 Abstract
Interval-Vector Polytopes Jessica De Silva Gabriel Dorfsman-Hopkins California State University, Stanislaus Dartmouth College Joseph Pruitt California State University, Long Beach July 28, 2012 Abstract
In this chapter we introduce some of the basic concepts that will be useful for the study of integer programming problems.
 2 Basics In this chapter we introduce some of the basic concepts that will be useful for the study of integer programming problems. 2.1 Notation Let A R m n be a matrix with row index set M = {1,...,m}
2 Basics In this chapter we introduce some of the basic concepts that will be useful for the study of integer programming problems. 2.1 Notation Let A R m n be a matrix with row index set M = {1,...,m}
LP Geometry: outline. A general LP. minimize x c T x s.t. a T i. x b i, i 2 M 1 a T i x = b i, i 2 M 3 x j 0, j 2 N 1. where
 LP Geometry: outline I Polyhedra I Extreme points, vertices, basic feasible solutions I Degeneracy I Existence of extreme points I Optimality of extreme points IOE 610: LP II, Fall 2013 Geometry of Linear
LP Geometry: outline I Polyhedra I Extreme points, vertices, basic feasible solutions I Degeneracy I Existence of extreme points I Optimality of extreme points IOE 610: LP II, Fall 2013 Geometry of Linear
Convex Sets. Pontus Giselsson
 Convex Sets Pontus Giselsson 1 Today s lecture convex sets convex, affine, conical hulls closure, interior, relative interior, boundary, relative boundary separating and supporting hyperplane theorems
Convex Sets Pontus Giselsson 1 Today s lecture convex sets convex, affine, conical hulls closure, interior, relative interior, boundary, relative boundary separating and supporting hyperplane theorems
Convex Sets (cont.) Convex Functions
 Convex Functions") Convex Sets (cont.) Convex Functions Optimization - 10725 Carlos Guestrin Carnegie Mellon University February 27 th, 2008 1 Definitions of convex sets Convex v. Non-convex sets Line segment definition:
Convex Sets (cont.) Convex Functions Optimization - 10725 Carlos Guestrin Carnegie Mellon University February 27 th, 2008 1 Definitions of convex sets Convex v. Non-convex sets Line segment definition:
Integer Programming Chapter 9
 Integer Programming Chapter 9 University of Chicago Booth School of Business Kipp Martin October 25, 2017 1 / 40 Outline Key Concepts MILP Set Monoids LP set Relaxation of MILP Set Formulation Quality
Integer Programming Chapter 9 University of Chicago Booth School of Business Kipp Martin October 25, 2017 1 / 40 Outline Key Concepts MILP Set Monoids LP set Relaxation of MILP Set Formulation Quality
Equality Set Projection: A new algorithm for the projection of polytopes in halfspace representation Colin N. Jones, Eric C. Kerrigan and Jan M.
 Equality Set Projection: A new algorithm for the projection of polytopes in halfspace representation Colin N. Jones, Eric C. Kerrigan and Jan M. Maciejowski CUED/F-INFENG/TR.463 June 8, 2004 Equality Set
Equality Set Projection: A new algorithm for the projection of polytopes in halfspace representation Colin N. Jones, Eric C. Kerrigan and Jan M. Maciejowski CUED/F-INFENG/TR.463 June 8, 2004 Equality Set
Elementary Combinatorial Topology
 Elementary Combinatorial Topology Frédéric Meunier Université Paris Est, CERMICS, Ecole des Ponts Paristech, 6-8 avenue Blaise Pascal, 77455 Marne-la-Vallée Cedex E-mail address: frederic.meunier@cermics.enpc.fr
Elementary Combinatorial Topology Frédéric Meunier Université Paris Est, CERMICS, Ecole des Ponts Paristech, 6-8 avenue Blaise Pascal, 77455 Marne-la-Vallée Cedex E-mail address: frederic.meunier@cermics.enpc.fr
Optimality certificates for convex minimization and Helly numbers
 Optimality certificates for convex minimization and Helly numbers Amitabh Basu Michele Conforti Gérard Cornuéjols Robert Weismantel Stefan Weltge May 10, 2017 Abstract We consider the problem of minimizing
Optimality certificates for convex minimization and Helly numbers Amitabh Basu Michele Conforti Gérard Cornuéjols Robert Weismantel Stefan Weltge May 10, 2017 Abstract We consider the problem of minimizing
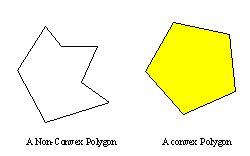
Question. Why is the third shape not convex?
 1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
Advanced Operations Research Techniques IE316. Quiz 2 Review. Dr. Ted Ralphs
 Advanced Operations Research Techniques IE316 Quiz 2 Review Dr. Ted Ralphs IE316 Quiz 2 Review 1 Reading for The Quiz Material covered in detail in lecture Bertsimas 4.1-4.5, 4.8, 5.1-5.5, 6.1-6.3 Material
Advanced Operations Research Techniques IE316 Quiz 2 Review Dr. Ted Ralphs IE316 Quiz 2 Review 1 Reading for The Quiz Material covered in detail in lecture Bertsimas 4.1-4.5, 4.8, 5.1-5.5, 6.1-6.3 Material
Figure 2.1: An example of a convex set and a nonconvex one.
 Convex Hulls 2.1 Definitions 2 Convexity is the key to understanding and simplifying geometry, and the convex hull plays a role in geometry akin to the sorted order for a collection of numbers. So what
Convex Hulls 2.1 Definitions 2 Convexity is the key to understanding and simplifying geometry, and the convex hull plays a role in geometry akin to the sorted order for a collection of numbers. So what
Optimality certificates for convex minimization and Helly numbers
 Optimality certificates for convex minimization and Helly numbers Amitabh Basu Michele Conforti Gérard Cornuéjols Robert Weismantel Stefan Weltge October 20, 2016 Abstract We consider the problem of minimizing
Optimality certificates for convex minimization and Helly numbers Amitabh Basu Michele Conforti Gérard Cornuéjols Robert Weismantel Stefan Weltge October 20, 2016 Abstract We consider the problem of minimizing
Introduction to Modern Control Systems
 Introduction to Modern Control Systems Convex Optimization, Duality and Linear Matrix Inequalities Kostas Margellos University of Oxford AIMS CDT 2016-17 Introduction to Modern Control Systems November
Introduction to Modern Control Systems Convex Optimization, Duality and Linear Matrix Inequalities Kostas Margellos University of Oxford AIMS CDT 2016-17 Introduction to Modern Control Systems November