3D Models from Contours: Further Identification of Unexposed Areas
|
|
|
- Bryan Newman
- 5 years ago
- Views:
Transcription
1 3D Models from Contours: Further Identification of Unexposed Areas Jiang Yu Zheng and Fumio Kishino ATR Communication Systems Research Laboratory 2-2 Hikaridai, Seika, Soraku, Kyoto , Japan Abstract This paper explores shape from contour method for acquiring a 30 model by using a continuous sequence of images taken as an object rotates. We analyze the areas that are unexposed to contours ana' detect them for further investigation. We describe a general approach to use the shape from contours. Our direct goal is to establish a 30 model of human face for the growing needs of visual communications. We have obtained some good results. 1. Introduction In recent years, developments in model based coding, stereoscopic display, and graphics generated virtual space have been an increasing demand for three-dimensional modeling of the human face as well as other objects. The application areas include visual communication, education, (and entertainment. We are attempting to generate views in some 3D virtual space for teleconferencing and video phone where a complete 3D head in needed. Although laser range finders and other structured light-projecting systems have been developed for acquiring precise 3D shape, They still have the following drawbacks: (1) they receive bad data from areas where the surface reflectance is low (such as black hair), and, (2) people do not feel comfortable when a laser continually scans across their face. We therefore explore a vision method. Shape from rotation is a natural way to observe an object. We look at an object while rotating it by hand, or, alternatively, we move our view point around the object. Rotational movement and its axis are particularly easy to obtain either from control or input images. There are different kinds of information in the image sequence of a rotating object --- information such as contour, flow, stereo disparity, and shading. Among them, the occluding contour in a 2D image directly reflects the 3D shape. At a contour point, the surface normal is perpendicular to both the line of sight and the contour itself. Giblin et al. [l] described a scheme to recover shape from continuous contours, but they did not consider the visibility of concave parts. Cipolla et al. [2] generalized the relative motion between camera and object to arbitrary translation and rotation, and applied algorithm to simple objects, but they were unable to detect the concave parts. Here we use occluding contour to recover shape because it has a good detectability in front of a homogeneous background. We will further deal with area that is invisible when viewing only silhouettes. We found that the unexposed area, which might be concave or planer surface, is numerically related to the nonsmoothness of the contour distribution (or to the discontinuity in the image velocity of a contour). We detect these areas by filtering contour distribution according to the model resolution required. The detection of unknown areas allows us to plan further acquisition of information inside these areas --- that is, by looking for such other infomation as fixed features or selfoccluding edges, and etc.. We also think that it as an important step towards automatic exploration of a model by an active vision approach. 2. Recovery of a 3D Model from Contours 2.1 Previous Work For simplicity, we consider the orthorgonal projection, but the results needed for perspective projection can be deduced in the same way. We have a face rotating around an axis that is stationary relative to a camera. Assume that the camera is set so that the y axis of the image frame is parallel to the axis of rotation. The surface of object can thereby be decomposed into connected boundaries on rotational planes (see Fig. 1). The rotation axis is at the position 0, the rotation angle of the face is 8, and the point on the boundary viewed at the angle is denoted as P(X,Z). In the image frame, the projection of this point is a contour point p(6) and its image distance from the projection of the axis x0 is o(6). The point P should be on the line of sight L(6): X cos0 + Zsin0 = o(8) (1). Imagefame /XO Fig. 1. Recovering shape from occluding contours. The shape on the slice is the envelope of lines of sight through the contour points p(6) changing in the image sequence, and the normal of the boundary (X',Z) is perpendicular to the line of sight. We have (X', Z') (cos& sin0)=o (2) for a smooth boundary where the first derivative exists. Taking the first derivative of Eq. (l), we obtain X/92 $3.00 Q 1992 IEEE 349
 The depth of P(XZ) from the image fmme is w'(e) and the radius of curvature of the boundary is w+w\" [l].")
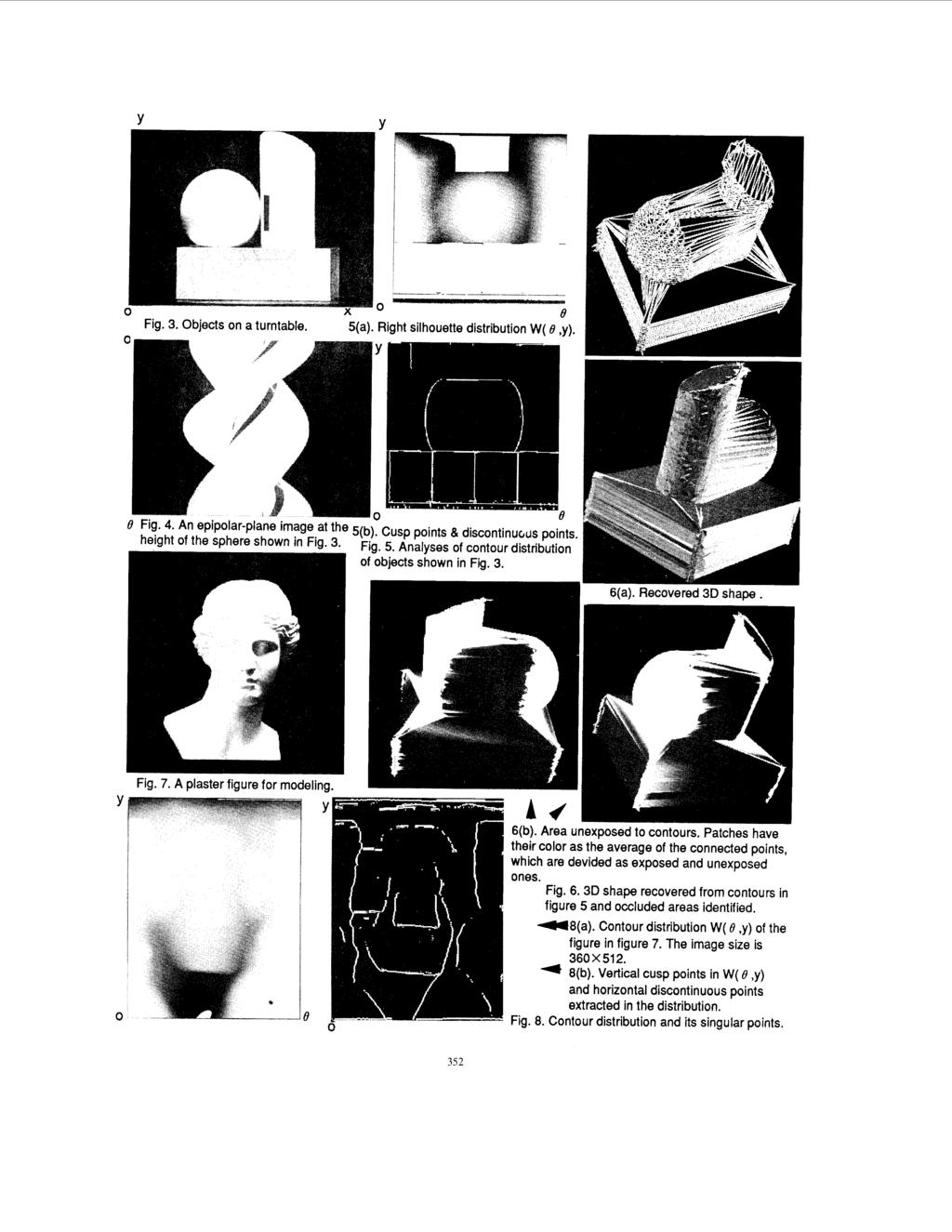
2 X'cos0 +Zsin0 - Xsin0 +Zcos0 = U'@). (3) Solving for X and Z, the coordinztes of PGZ) can be given as P(X, Z): X = w cos0- w'sin0 (4.1) 2 = w sin6 + w' cos0 (4.2) The depth of P(XZ) from the image fmme is w'(e) and the radius of curvature of the boundary is w+w" [l]. In practise, w can be located in the image to the precision of a pixel, whereas d(e) is less precise because it is determined from digitized values. The method is therefore good at estimating the distance of 3D points from the axis (the first terms in Eqs. (4.1) and (4.2)) but contains errors in the angle with respect to the axis (determined by the second terms in these equations). 2.2 Shape Unexposed to Contour A good vision algoriihm should be able to locate where the unknown part is in its output so that the area can be further explored by other methods. In the shape from contour method, a nonconvex shape on the moving plane, as well as other occluded parts, are unknown. Let us look at the behavior of line of sight at an occluded boundary on a rotational plane (Fig. 2). Lie of sight\ Fig.2. Detecting the boundary uneyposed to contour. A concave or linear segment of the boundary is between two convex segments and is occluded by them on both sides. As a face rotates, the line of sight shifts as a tangent line on a convex boundary. Along a particular viewing direction 80, the line of sight will touch two convex tangent points at the same time and then jump from the first mountain to the second. At the angle 80, the trace of the image point p(8), or the change is not smooth, although it is still continuous. Figure 3 shows three objects set put on a turntable or modelling: a sphere, a cylinder, and a box. A horizontal epipolar plane at the center of the sphere is shown in Fig. 4. We can intuitively see the cusp points (which are due to the existence of occluded areas between the sphere and cylinder) on the traces of the left and right contours. Denoting the left and right derivatives of as 0'- and a'+, and denoting the tangent points sharing the same line of sight at the separated convex segments as Pl(X1,Zl) and Pz(X2,Z2), we have X1 cos sin0 = w(8) (5.1) x2 cos sin0 = w(8) (5.2). Taking the left derivative about 8 at the point P1 and the right derivative about 8 at the point P2, we obtain -Xi sin6 + Z1 cos0 = U'- (e) L'- (e): (6.1) L'+(8): -X2 sin cos6 = 0'+(8) (6.2) Solving for X1, X2,Z1, and 22, we have Pi(X1, U): X1 =w cos0-0'- sin0 (7.1) Zl =w sin0 + 0'- cos0 (7.2) P2(X2,22): X2 =w cos0 - U'+ sin0 (8.1) 22 =a sin0 + a'+ cos0 (8.2) D(AX, U) X2 -XI = -(a'+ - d-1 sin0 (9.1) zz - zi = (o'+ - UP-) case. (9.2) The vector jumping from Pl(X1, Zl) to P2(X2,Z2) thus has the length a'+ - CO'-, and we can compute two margin points that indicate the unexposed segment. For a smooth trace where w'+ = w'- = a', the jump is zero and the formulas for computing the points on the boundary are the same as Eqs. (4.1) and (4.2). If we find discontinuity in the first derivative o'(e) and, correspondingly, a linear segment connecting two tangent points, we can assert there is a concave, linear, or occluded convex boundary between these points. 2.3 Detecting the Unexposed Areas Suppose that the resolution required for a 3D model is expressed as the size of the smallest patch on the model. This resolution's component on the rotational plane is denoted as the length 6. According to this given 6, we identify areas unexposed to contours by locating the cusp points of o(0). Because the length over an unexposed boundary is equal to the difference between the left and right first derivatives of de), we have the criterion o'+ - 0'- > 6. (10) As 8 increases, w(e) comes in continuously by tracking a contour point. We fed the sequence w(e) to a connected pair of differential operators, which has the same effect as a second-order differential filter denoted F. The first convolution with the filter yields the step-type signals at the cusp points and then the second convolution yields the peaks in the output at cusp points. It is interesting to notice that cusp points on the trace of the right silhouette are always leftward, and the cusp points on the left trace are rightward. We can therefore find nonsmooth points of w(0) from the right silhouette by extracting the local maxima in the filtered sequence F(o(8)). To ignore the concave or linear segments that are shorter than the required length 6, we set the threshold of F(o(8)) at the 6 before finding the local maximum. At the same time, we set a window moving over the w(e) to compute precise first derivative for Eqs. (4) at smooth place. The window size is adaptive near the extracted cusp points so that the cusp points are excluded from the estimation of 61'- (e) and a'+@) for the Eqs. (7-9). We simply use the least square approximation to fit a line to the data in the window so that we can obtain its tangent as the derivatives. This processing for the shape and unknown area

3 identification can be carried out almost instantaneously as images come in continuously; with the only delay as the size of the filter F(o(8)). 3. General Approach of Using Contours 3.1 Relations between Contours and 3D Points There are several kinds of relationship between contours in the image and 3D points on the observed object, and the distribution of estimated 3D points is related to the surface curvature. Let us first look at the case where the contour in the image is not parallel to the rotational plane. As a line of sight shifts across a smooth convex surface on the rotational plane, there is a one-to-one correspondence between a contour point and a surface point. Differentiating Eqs (4.1) and (4.2). we obtain AX = - (ww") sin0 A8 (11.1) AZ = (WO") cos0 A8 (11.2). If an interval of A8 is given, the density of the estimated 3D points on the boundary is 1 1 curvature =- denrity=~~=(o+o")a8 A8 ' (12) According to Giblin's [l] results, this density is proportional to the curvature of the boundary. This is desired for the data reduction in representing shape of the 3D model. In the extreme case of infinite curvature, which is a convex cusp point on the surface, more than one line of sight goes through the cusp point and the recovered 3D points should be at the same position. This forms a manyto-one correspondence between contours and a surface point, and this kind of correspondence may allow us to refine the estimation by using redundant dab. Moreover, in the case of unexposed boundary, there is a one-to-many correspondence between a contour point through which a line of sight touches two convex boundaries, and points that are occluded. The shape invisible to contours should be investigated by using other visual cues. If the contour is, on the other hand, parallel to the rotational plane, a line of sight through that contour may touch many 3D points, and a 3D point will be projected to contours in more than one image. This produces a manyto-many correspondence. A plane on the rotational plane is one such case. This kind of contour can be detected at the discontinuity in each contour o(8,y) along the y axis. 3.2 Implementation We choose to implement this method in an algorithm for a fixed camera and an object that rotates around an axis. This geometry needs little space, is easy to set up, and allows the use of a static background that reduces the cost in image processing. Moreover, it needs almost no calibration of camera to get the rotational axis. Our algorithm starts tracking continuous contours from image to image and generates a matrix W(8,y) that describes the distribution of o(8,y) at each height. Figure 5(a) shows the contour distribution of the objects shown in Fig. 3: the period here is 21c and the value of o is displayed in grey level. To find the vertical valleys in this image, the dynamically yielded W(8,y) is filtered horizontally by the operator F(o(8)). After thresholding its output at k6, where k is a weighted constant, local maxima are detecled and marked as cusp points. At the same time, we locate horizontal edge points in W(B,y), where discontinuities in the vertical direction appear in the contour, by convoluting with a normal vertical differential operator. The resulting positions are marked for exclusion from shape estimation by Eqs. (4) and (7-9). For the distribution W(6,y) in Fig. 5(a), vertically distributed nonsmooth points and horizontal edges are shown in Fig. 5(b). Surface points are estimated as fallows: Small adaptive windows shift over W(8,y) at the places without cusp points or discontinuous points. The derivatives are approximated inside the windows, and the 3D positions are computed either by Eqs. (4) or by Eqs. (7)-(9), with the unexposed area detected. Figure qa) shows two views of the estimated shape of the objects shown in Fig. 3. The obtained 3D points are connected by triangular patches. In figure 6@), the unexposed areas are shown as gray patches. The occluded part may still have some convex and concave segments. Due to the differences in surface orientation, the convex segments extended from both sides can be calculated from the self-occluding edges by using Eqs. (4.1) and (4.2) (see Fig. 2). But if the concave part is shallow, it is difficult to locate self-occluding contours in a long period of rotation. We need some verification of the results. Fixed points due to the discontinuity in surface albedo or surface orientation can help to determine the shape in an unexposed area [3]. 4, Experiments Experiments were performed using plater models and real people. The cvnera was fixed far away from subjects and a lens with long focal length was used to approximate orthorgond projection. A model was put on a turntable that could be controlled by computer step by step. The results generated from a total of 360 images are shown in Figs In a more difficult experiment, people sat in a swivel chair and about 200 images (256*256) were taken by a video camera as the chair rotated. We do not have control of the chair so the changeable rotation speed and unknown axis position had to be obtained from image sequence. We tracked two marks attached to the subjects' shoulders and succeeded in estimating the information about their positions. The texture of the face was also collected in a dynamic projection image [4]. When the images were taken, this texture was dynamically sampled from a vertical pixel line at the center of both left and right silhouettes. The memorized texture was then mapped onto the recovered 3D model. Figures 11 show one example of models made from real people. Our algorithm has stably modelled many people by using image sequences about 7 seconds long. 35 I
4 352

5 5. Conclusion We made 3D models from a sequence of rotational images. We analyzed the behavior of contour and the unexposed area in the image sequence, and we gave a general approach to use contour. Identification of the areas that an algorithm is unable to model will allow other vision modules to further plan active investigation. We think this ability is very important for an algorithm in qualitative understanding of the visual world. The established facial model will be used in graphics-generated vi mal space for visual communications.- References [l] P. Giblin, R. Weiss, "Reconstruction of surface from profiles", 1st ICCV, pp , [2] R. Cipolla, and A. Black, "The dynamic analysis of apparent contours", 3th ICCV, pp [3] J.Y. Zheng. F.Kishino, "Verifying and combining different visual cues into a complete 3D model", CVPR92, June, [4] J. Y. Zheng, and S. Tsuji, "From Anothorscopic Perception to dynamic vision", 1990 IEEE Conf. Robotics and Automation, V01.2, pp Fig. 10. Area unexposedto the contours on the plaster figure. Fig. 9. Wire frame model and shaded model of the recovered figure. Fig. 11. An example of 3D face models obtained from a real person with only a swivel chair and a homogeneous background behind the subjects. Several views of the recovered model are shown. It contains about 80 x 100 3D points. 3.53
Constructing a 3D Object Model from Multiple Visual Features
 Constructing a 3D Object Model from Multiple Visual Features Jiang Yu Zheng Faculty of Computer Science and Systems Engineering Kyushu Institute of Technology Iizuka, Fukuoka 820, Japan Abstract This work
Constructing a 3D Object Model from Multiple Visual Features Jiang Yu Zheng Faculty of Computer Science and Systems Engineering Kyushu Institute of Technology Iizuka, Fukuoka 820, Japan Abstract This work
Acquiring 3-D Models from Sequences of Contours
 IEEE TRANSACTIONS ON PATI ERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 16, NO. 2, FEBRUARY 1994 163 Acquiring 3-D Models from Sequences of Contours Jiang Yu Zheng Abshulcf-This paper explores shape from
IEEE TRANSACTIONS ON PATI ERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 16, NO. 2, FEBRUARY 1994 163 Acquiring 3-D Models from Sequences of Contours Jiang Yu Zheng Abshulcf-This paper explores shape from
of 3D Models from Specular Motion Using Circular Lights
 Reconstruction of 3D Models from Specular Motion Using Circular Lights Jiang Yu Zheng, Akio Murata, Yoshihiro Fukagawa, and1 Norihiro Abe Faculty of Computer Science and Systems Engineering Kyushu Institute
Reconstruction of 3D Models from Specular Motion Using Circular Lights Jiang Yu Zheng, Akio Murata, Yoshihiro Fukagawa, and1 Norihiro Abe Faculty of Computer Science and Systems Engineering Kyushu Institute
Computing 3 odels of Rotating Objects from Moving Shading
 Computing 3 odels of Rotating Objects from Moving Shading Jiang Yu Zheng, Hiroshi Kakinoki, Kazuaki Tanaka and Norihiro Abe Faculty of Computer Science and Systems Engineering Kyushu Institute of Technology
Computing 3 odels of Rotating Objects from Moving Shading Jiang Yu Zheng, Hiroshi Kakinoki, Kazuaki Tanaka and Norihiro Abe Faculty of Computer Science and Systems Engineering Kyushu Institute of Technology
Acquiring a Complete 3D Model from Specular Motion under the Illumination of Circular-Shaped Light Sources
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL., NO. 8, AUGUST 000 913 Acquiring a Complete 3D Model from Specular Motion under the Illumination of Circular-Shaped Light Sources Jiang
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL., NO. 8, AUGUST 000 913 Acquiring a Complete 3D Model from Specular Motion under the Illumination of Circular-Shaped Light Sources Jiang
3D Sensing and Reconstruction Readings: Ch 12: , Ch 13: ,
 3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
Stereo CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Acquiring 3D Models from Rotation and Highlights
 Acquiring 3D Models from Rotation and Highlights Jiang Y U Zheng, Y oshihiro Fukagawa, Tetsuo Ohtsuka and Norihiro Abe Faculty of Computer Science and Systems Engineering Kyushu nstitute of Technology
Acquiring 3D Models from Rotation and Highlights Jiang Y U Zheng, Y oshihiro Fukagawa, Tetsuo Ohtsuka and Norihiro Abe Faculty of Computer Science and Systems Engineering Kyushu nstitute of Technology
STRUCTURE AND MOTION ESTIMATION FROM DYNAMIC SILHOUETTES UNDER PERSPECTIVE PROJECTION *
 STRUCTURE AND MOTION ESTIMATION FROM DYNAMIC SILHOUETTES UNDER PERSPECTIVE PROJECTION * Tanuja Joshi Narendra Ahuja Jean Ponce Beckman Institute, University of Illinois, Urbana, Illinois 61801 Abstract:
STRUCTURE AND MOTION ESTIMATION FROM DYNAMIC SILHOUETTES UNDER PERSPECTIVE PROJECTION * Tanuja Joshi Narendra Ahuja Jean Ponce Beckman Institute, University of Illinois, Urbana, Illinois 61801 Abstract:
Automatic Reconstruction of 3D Objects Using a Mobile Monoscopic Camera
 Automatic Reconstruction of 3D Objects Using a Mobile Monoscopic Camera Wolfgang Niem, Jochen Wingbermühle Universität Hannover Institut für Theoretische Nachrichtentechnik und Informationsverarbeitung
Automatic Reconstruction of 3D Objects Using a Mobile Monoscopic Camera Wolfgang Niem, Jochen Wingbermühle Universität Hannover Institut für Theoretische Nachrichtentechnik und Informationsverarbeitung
Complex Sensors: Cameras, Visual Sensing. The Robotics Primer (Ch. 9) ECE 497: Introduction to Mobile Robotics -Visual Sensors
 ECE 497: Introduction to Mobile Robotics -Visual Sensors") Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Affine Surface Reconstruction By Purposive Viewpoint Control
 Affine Surface Reconstruction By Purposive Viewpoint Control Kiriakos N. Kutulakos kyros@cs.rochester.edu Department of Computer Sciences University of Rochester Rochester, NY 14627-0226 USA Abstract We
Affine Surface Reconstruction By Purposive Viewpoint Control Kiriakos N. Kutulakos kyros@cs.rochester.edu Department of Computer Sciences University of Rochester Rochester, NY 14627-0226 USA Abstract We
Generating Dynamic Projection Images for Scene Representation and Understanding
 COMPUTER VISION AND IMAGE UNDERSTANDING Vol. 72, No. 3, December, pp. 237 256, 1998 ARTICLE NO. IV980678 Generating Dynamic Projection Images for Scene Representation and Understanding Jiang Yu Zheng and
COMPUTER VISION AND IMAGE UNDERSTANDING Vol. 72, No. 3, December, pp. 237 256, 1998 ARTICLE NO. IV980678 Generating Dynamic Projection Images for Scene Representation and Understanding Jiang Yu Zheng and
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
A Novel Stereo Camera System by a Biprism
 528 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 16, NO. 5, OCTOBER 2000 A Novel Stereo Camera System by a Biprism DooHyun Lee and InSo Kweon, Member, IEEE Abstract In this paper, we propose a novel
528 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 16, NO. 5, OCTOBER 2000 A Novel Stereo Camera System by a Biprism DooHyun Lee and InSo Kweon, Member, IEEE Abstract In this paper, we propose a novel
3D Environment Measurement Using Binocular Stereo and Motion Stereo by Mobile Robot with Omnidirectional Stereo Camera
 3D Environment Measurement Using Binocular Stereo and Motion Stereo by Mobile Robot with Omnidirectional Stereo Camera Shinichi GOTO Department of Mechanical Engineering Shizuoka University 3-5-1 Johoku,
3D Environment Measurement Using Binocular Stereo and Motion Stereo by Mobile Robot with Omnidirectional Stereo Camera Shinichi GOTO Department of Mechanical Engineering Shizuoka University 3-5-1 Johoku,
Optical Flow-Based Person Tracking by Multiple Cameras
 Proc. IEEE Int. Conf. on Multisensor Fusion and Integration in Intelligent Systems, Baden-Baden, Germany, Aug. 2001. Optical Flow-Based Person Tracking by Multiple Cameras Hideki Tsutsui, Jun Miura, and
Proc. IEEE Int. Conf. on Multisensor Fusion and Integration in Intelligent Systems, Baden-Baden, Germany, Aug. 2001. Optical Flow-Based Person Tracking by Multiple Cameras Hideki Tsutsui, Jun Miura, and
Stereo imaging ideal geometry
 Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Introduction to 3D Imaging: Perceiving 3D from 2D Images
 Introduction to 3D Imaging: Perceiving 3D from 2D Images How can we derive 3D information from one or more 2D images? There have been 2 approaches: 1. intrinsic images: a 2D representation that stores
Introduction to 3D Imaging: Perceiving 3D from 2D Images How can we derive 3D information from one or more 2D images? There have been 2 approaches: 1. intrinsic images: a 2D representation that stores
1 (5 max) 2 (10 max) 3 (20 max) 4 (30 max) 5 (10 max) 6 (15 extra max) total (75 max + 15 extra)
 2 (10 max) 3 (20 max) 4 (30 max) 5 (10 max) 6 (15 extra max) total (75 max + 15 extra)") Mierm Exam CS223b Stanford CS223b Computer Vision, Winter 2004 Feb. 18, 2004 Full Name: Email: This exam has 7 pages. Make sure your exam is not missing any sheets, and write your name on every page. The
Mierm Exam CS223b Stanford CS223b Computer Vision, Winter 2004 Feb. 18, 2004 Full Name: Email: This exam has 7 pages. Make sure your exam is not missing any sheets, and write your name on every page. The
VOLUMETRIC MODEL REFINEMENT BY SHELL CARVING
 VOLUMETRIC MODEL REFINEMENT BY SHELL CARVING Y. Kuzu a, O. Sinram b a Yıldız Technical University, Department of Geodesy and Photogrammetry Engineering 34349 Beşiktaş Istanbul, Turkey - kuzu@yildiz.edu.tr
VOLUMETRIC MODEL REFINEMENT BY SHELL CARVING Y. Kuzu a, O. Sinram b a Yıldız Technical University, Department of Geodesy and Photogrammetry Engineering 34349 Beşiktaş Istanbul, Turkey - kuzu@yildiz.edu.tr
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
16.6. Parametric Surfaces. Parametric Surfaces. Parametric Surfaces. Vector Calculus. Parametric Surfaces and Their Areas
 16 Vector Calculus 16.6 and Their Areas Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. and Their Areas Here we use vector functions to describe more general
16 Vector Calculus 16.6 and Their Areas Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. and Their Areas Here we use vector functions to describe more general
Robert Collins CSE486, Penn State Lecture 08: Introduction to Stereo
 Lecture 08: Introduction to Stereo Reading: T&V Section 7.1 Stereo Vision Inferring depth from images taken at the same time by two or more cameras. Basic Perspective Projection Scene Point Perspective
Lecture 08: Introduction to Stereo Reading: T&V Section 7.1 Stereo Vision Inferring depth from images taken at the same time by two or more cameras. Basic Perspective Projection Scene Point Perspective
TOWARDS STRUCTURE AND MOTION ESTIMATION FROM DYNAMIC SILHOUETTES *
 TOWARDS STRUCTURE AND MOTION ESTIMATION FROM DYNAMIC SILHOUETTES * Tanuja Joshi Narendra Ahuja Jean Ponce Beckman Institute, University Of Illinois, Urbana, IL 61801 Abstract: We address the problem of
TOWARDS STRUCTURE AND MOTION ESTIMATION FROM DYNAMIC SILHOUETTES * Tanuja Joshi Narendra Ahuja Jean Ponce Beckman Institute, University Of Illinois, Urbana, IL 61801 Abstract: We address the problem of
Perspective and vanishing points
 Last lecture when I discussed defocus blur and disparities, I said very little about neural computation. Instead I discussed how blur and disparity are related to each other and to depth in particular,
Last lecture when I discussed defocus blur and disparities, I said very little about neural computation. Instead I discussed how blur and disparity are related to each other and to depth in particular,
A High Speed Face Measurement System
 A High Speed Face Measurement System Kazuhide HASEGAWA, Kazuyuki HATTORI and Yukio SATO Department of Electrical and Computer Engineering, Nagoya Institute of Technology Gokiso, Showa, Nagoya, Japan, 466-8555
A High Speed Face Measurement System Kazuhide HASEGAWA, Kazuyuki HATTORI and Yukio SATO Department of Electrical and Computer Engineering, Nagoya Institute of Technology Gokiso, Showa, Nagoya, Japan, 466-8555
Measurements using three-dimensional product imaging
 ARCHIVES of FOUNDRY ENGINEERING Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (1897-3310) Volume 10 Special Issue 3/2010 41 46 7/3 Measurements using
ARCHIVES of FOUNDRY ENGINEERING Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (1897-3310) Volume 10 Special Issue 3/2010 41 46 7/3 Measurements using
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision QUIZ II
 Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision QUIZ II Handed out: 001 Nov. 30th Due on: 001 Dec. 10th Problem 1: (a (b Interior
Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision QUIZ II Handed out: 001 Nov. 30th Due on: 001 Dec. 10th Problem 1: (a (b Interior
Local qualitative shape from stereo. without detailed correspondence. Extended Abstract. Shimon Edelman. Internet:
 Local qualitative shape from stereo without detailed correspondence Extended Abstract Shimon Edelman Center for Biological Information Processing MIT E25-201, Cambridge MA 02139 Internet: edelman@ai.mit.edu
Local qualitative shape from stereo without detailed correspondence Extended Abstract Shimon Edelman Center for Biological Information Processing MIT E25-201, Cambridge MA 02139 Internet: edelman@ai.mit.edu
Depth. Chapter Stereo Imaging
 Chapter 11 Depth Calculating the distance of various points in the scene relative to the position of the camera is one of the important tasks for a computer vision system. A common method for extracting
Chapter 11 Depth Calculating the distance of various points in the scene relative to the position of the camera is one of the important tasks for a computer vision system. A common method for extracting
Shape and Model from Specular Motion
 Shape and Model from Specular Motion Jiang Y u Zheng, Yoshihiro Fukagawa and Norihiro Abe Faculty of Computer Science and Systems Engineering Kyushu Institute of Technology, Iizuka, Fukuoka 820, Japan
Shape and Model from Specular Motion Jiang Y u Zheng, Yoshihiro Fukagawa and Norihiro Abe Faculty of Computer Science and Systems Engineering Kyushu Institute of Technology, Iizuka, Fukuoka 820, Japan
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
Transactions on Information and Communications Technologies vol 16, 1996 WIT Press, ISSN
 ransactions on Information and Communications echnologies vol 6, 996 WI Press, www.witpress.com, ISSN 743-357 Obstacle detection using stereo without correspondence L. X. Zhou & W. K. Gu Institute of Information
ransactions on Information and Communications echnologies vol 6, 996 WI Press, www.witpress.com, ISSN 743-357 Obstacle detection using stereo without correspondence L. X. Zhou & W. K. Gu Institute of Information
Stereo Image Rectification for Simple Panoramic Image Generation
 Stereo Image Rectification for Simple Panoramic Image Generation Yun-Suk Kang and Yo-Sung Ho Gwangju Institute of Science and Technology (GIST) 261 Cheomdan-gwagiro, Buk-gu, Gwangju 500-712 Korea Email:{yunsuk,
Stereo Image Rectification for Simple Panoramic Image Generation Yun-Suk Kang and Yo-Sung Ho Gwangju Institute of Science and Technology (GIST) 261 Cheomdan-gwagiro, Buk-gu, Gwangju 500-712 Korea Email:{yunsuk,
Computer Vision cmput 428/615
 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Range Sensors (time of flight) (1)
 (1)") Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Optics II. Reflection and Mirrors
 Optics II Reflection and Mirrors Geometric Optics Using a Ray Approximation Light travels in a straight-line path in a homogeneous medium until it encounters a boundary between two different media The
Optics II Reflection and Mirrors Geometric Optics Using a Ray Approximation Light travels in a straight-line path in a homogeneous medium until it encounters a boundary between two different media The
cse 252c Fall 2004 Project Report: A Model of Perpendicular Texture for Determining Surface Geometry
 cse 252c Fall 2004 Project Report: A Model of Perpendicular Texture for Determining Surface Geometry Steven Scher December 2, 2004 Steven Scher SteveScher@alumni.princeton.edu Abstract Three-dimensional
cse 252c Fall 2004 Project Report: A Model of Perpendicular Texture for Determining Surface Geometry Steven Scher December 2, 2004 Steven Scher SteveScher@alumni.princeton.edu Abstract Three-dimensional
A Linear Dual-Space Approach to 3D Surface Reconstruction from Occluding Contours using Algebraic Surfaces
 A Linear Dual-Space Approach to 3D Surface Reconstruction from Occluding Contours using Algebraic Surfaces Kongbin Kang Jean-Philippe Tarel Richard Fishman David Cooper Div. of Eng. LIVIC (INRETS-LCPC)
A Linear Dual-Space Approach to 3D Surface Reconstruction from Occluding Contours using Algebraic Surfaces Kongbin Kang Jean-Philippe Tarel Richard Fishman David Cooper Div. of Eng. LIVIC (INRETS-LCPC)
3D Shape Recovery of Smooth Surfaces: Dropping the Fixed Viewpoint Assumption
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL., NO., 1 3D Shape Recovery of Smooth Surfaces: Dropping the Fixed Viewpoint Assumption Yael Moses Member, IEEE and Ilan Shimshoni Member,
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL., NO., 1 3D Shape Recovery of Smooth Surfaces: Dropping the Fixed Viewpoint Assumption Yael Moses Member, IEEE and Ilan Shimshoni Member,
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Chapters 1 7: Overview
 Chapters 1 7: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 7: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapter
Chapters 1 7: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 7: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapter
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
2D Object Definition (1/3)
") 2D Object Definition (1/3) Lines and Polylines Lines drawn between ordered points to create more complex forms called polylines Same first and last point make closed polyline or polygon Can intersect itself
2D Object Definition (1/3) Lines and Polylines Lines drawn between ordered points to create more complex forms called polylines Same first and last point make closed polyline or polygon Can intersect itself
Self-calibration of a pair of stereo cameras in general position
 Self-calibration of a pair of stereo cameras in general position Raúl Rojas Institut für Informatik Freie Universität Berlin Takustr. 9, 14195 Berlin, Germany Abstract. This paper shows that it is possible
Self-calibration of a pair of stereo cameras in general position Raúl Rojas Institut für Informatik Freie Universität Berlin Takustr. 9, 14195 Berlin, Germany Abstract. This paper shows that it is possible
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
The Three Dimensional Coordinate System
 The Three-Dimensional Coordinate System The Three Dimensional Coordinate System You can construct a three-dimensional coordinate system by passing a z-axis perpendicular to both the x- and y-axes at the
The Three-Dimensional Coordinate System The Three Dimensional Coordinate System You can construct a three-dimensional coordinate system by passing a z-axis perpendicular to both the x- and y-axes at the
Topics and things to know about them:
 Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Reflection & Mirrors
 Reflection & Mirrors Geometric Optics Using a Ray Approximation Light travels in a straight-line path in a homogeneous medium until it encounters a boundary between two different media A ray of light is
Reflection & Mirrors Geometric Optics Using a Ray Approximation Light travels in a straight-line path in a homogeneous medium until it encounters a boundary between two different media A ray of light is
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
An Overview of Matchmoving using Structure from Motion Methods
 An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
EECS 442 Computer vision. Announcements
 EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Judging Whether Multiple Silhouettes Can Come from the Same Object
 Judging Whether Multiple Silhouettes Can Come from the Same Object David Jacobs 1, eter Belhumeur 2, and Ian Jermyn 3 1 NEC Research Institute 2 Yale University 3 New York University Abstract. We consider
Judging Whether Multiple Silhouettes Can Come from the Same Object David Jacobs 1, eter Belhumeur 2, and Ian Jermyn 3 1 NEC Research Institute 2 Yale University 3 New York University Abstract. We consider
coding of various parts showing different features, the possibility of rotation or of hiding covering parts of the object's surface to gain an insight
 Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
General Principles of 3D Image Analysis
 General Principles of 3D Image Analysis high-level interpretations objects scene elements Extraction of 3D information from an image (sequence) is important for - vision in general (= scene reconstruction)
General Principles of 3D Image Analysis high-level interpretations objects scene elements Extraction of 3D information from an image (sequence) is important for - vision in general (= scene reconstruction)
3D-OBJECT DETECTION METHOD BASED ON THE STEREO IMAGE TRANSFORMATION TO THE COMMON OBSERVATION POINT
 3D-OBJECT DETECTION METHOD BASED ON THE STEREO IMAGE TRANSFORMATION TO THE COMMON OBSERVATION POINT V. M. Lisitsyn *, S. V. Tikhonova ** State Research Institute of Aviation Systems, Moscow, Russia * lvm@gosniias.msk.ru
3D-OBJECT DETECTION METHOD BASED ON THE STEREO IMAGE TRANSFORMATION TO THE COMMON OBSERVATION POINT V. M. Lisitsyn *, S. V. Tikhonova ** State Research Institute of Aviation Systems, Moscow, Russia * lvm@gosniias.msk.ru
Chapter 5. Projections and Rendering
 Chapter 5 Projections and Rendering Topics: Perspective Projections The rendering pipeline In order to view manipulate and view a graphics object we must find ways of storing it a computer-compatible way.
Chapter 5 Projections and Rendering Topics: Perspective Projections The rendering pipeline In order to view manipulate and view a graphics object we must find ways of storing it a computer-compatible way.
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
Realtime Omnidirectional Stereo for Obstacle Detection and Tracking in Dynamic Environments
 Proc. 2001 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems pp. 31-36, Maui, Hawaii, Oct./Nov. 2001. Realtime Omnidirectional Stereo for Obstacle Detection and Tracking in Dynamic Environments Hiroshi
Proc. 2001 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems pp. 31-36, Maui, Hawaii, Oct./Nov. 2001. Realtime Omnidirectional Stereo for Obstacle Detection and Tracking in Dynamic Environments Hiroshi
10/5/09 1. d = 2. Range Sensors (time of flight) (2) Ultrasonic Sensor (time of flight, sound) (1) Ultrasonic Sensor (time of flight, sound) (2) 4.1.
 (2) Ultrasonic Sensor (time of flight, sound) (1) Ultrasonic Sensor (time of flight, sound) (2) 4.1.") Range Sensors (time of flight) (1) Range Sensors (time of flight) (2) arge range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic
Range Sensors (time of flight) (1) Range Sensors (time of flight) (2) arge range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic
3D Object Model Acquisition from Silhouettes
 4th International Symposium on Computing and Multimedia Studies 1 3D Object Model Acquisition from Silhouettes Masaaki Iiyama Koh Kakusho Michihiko Minoh Academic Center for Computing and Media Studies
4th International Symposium on Computing and Multimedia Studies 1 3D Object Model Acquisition from Silhouettes Masaaki Iiyama Koh Kakusho Michihiko Minoh Academic Center for Computing and Media Studies
Omni Stereo Vision of Cooperative Mobile Robots
 Omni Stereo Vision of Cooperative Mobile Robots Zhigang Zhu*, Jizhong Xiao** *Department of Computer Science **Department of Electrical Engineering The City College of the City University of New York (CUNY)
Omni Stereo Vision of Cooperative Mobile Robots Zhigang Zhu*, Jizhong Xiao** *Department of Computer Science **Department of Electrical Engineering The City College of the City University of New York (CUNY)
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Introduction to Homogeneous coordinates
 Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Curve Matching and Stereo Calibration
 Curve Matching and Stereo Calibration John Porrill & Stephen Pollard The topological obstacles to the matching of smooth curves in stereo images are shown to occur at epipolar tangencies. Such points are
Curve Matching and Stereo Calibration John Porrill & Stephen Pollard The topological obstacles to the matching of smooth curves in stereo images are shown to occur at epipolar tangencies. Such points are
CS223b Midterm Exam, Computer Vision. Monday February 25th, Winter 2008, Prof. Jana Kosecka
 CS223b Midterm Exam, Computer Vision Monday February 25th, Winter 2008, Prof. Jana Kosecka Your name email This exam is 8 pages long including cover page. Make sure your exam is not missing any pages.
CS223b Midterm Exam, Computer Vision Monday February 25th, Winter 2008, Prof. Jana Kosecka Your name email This exam is 8 pages long including cover page. Make sure your exam is not missing any pages.
Grasping Known Objects with Aldebaran Nao
 CS365 Project Report Grasping Known Objects with Aldebaran Nao By: Ashu Gupta( ashug@iitk.ac.in) Mohd. Dawood( mdawood@iitk.ac.in) Department of Computer Science and Engineering IIT Kanpur Mentor: Prof.
CS365 Project Report Grasping Known Objects with Aldebaran Nao By: Ashu Gupta( ashug@iitk.ac.in) Mohd. Dawood( mdawood@iitk.ac.in) Department of Computer Science and Engineering IIT Kanpur Mentor: Prof.
Computational Foundations of Cognitive Science
 Computational Foundations of Cognitive Science Lecture 16: Models of Object Recognition Frank Keller School of Informatics University of Edinburgh keller@inf.ed.ac.uk February 23, 2010 Frank Keller Computational
Computational Foundations of Cognitive Science Lecture 16: Models of Object Recognition Frank Keller School of Informatics University of Edinburgh keller@inf.ed.ac.uk February 23, 2010 Frank Keller Computational
1) Find. a) b) c) d) e) 2) The function g is defined by the formula. Find the slope of the tangent line at x = 1. a) b) c) e) 3) Find.
 Find. a) b) c) d) e) 2) The function g is defined by the formula. Find the slope of the tangent line at x = 1. a) b) c) e) 3) Find.") 1 of 7 1) Find 2) The function g is defined by the formula Find the slope of the tangent line at x = 1. 3) Find 5 1 The limit does not exist. 4) The given function f has a removable discontinuity at x
1 of 7 1) Find 2) The function g is defined by the formula Find the slope of the tangent line at x = 1. 3) Find 5 1 The limit does not exist. 4) The given function f has a removable discontinuity at x
Clipping. CSC 7443: Scientific Information Visualization
 Clipping Clipping to See Inside Obscuring critical information contained in a volume data Contour displays show only exterior visible surfaces Isosurfaces can hide other isosurfaces Other displays can
Clipping Clipping to See Inside Obscuring critical information contained in a volume data Contour displays show only exterior visible surfaces Isosurfaces can hide other isosurfaces Other displays can
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera
 Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera Tomokazu Satoy, Masayuki Kanbaray, Naokazu Yokoyay and Haruo Takemuraz ygraduate School of Information
Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera Tomokazu Satoy, Masayuki Kanbaray, Naokazu Yokoyay and Haruo Takemuraz ygraduate School of Information
Silhouette Coherence for Camera Calibration under Circular Motion
 Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Appendix I 2 I. ERROR ANALYSIS OF THE SILHOUETTE COHERENCE AS A FUNCTION OF SILHOUETTE
Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Appendix I 2 I. ERROR ANALYSIS OF THE SILHOUETTE COHERENCE AS A FUNCTION OF SILHOUETTE
DEVELOPMENT OF REAL TIME 3-D MEASUREMENT SYSTEM USING INTENSITY RATIO METHOD
 DEVELOPMENT OF REAL TIME 3-D MEASUREMENT SYSTEM USING INTENSITY RATIO METHOD Takeo MIYASAKA and Kazuo ARAKI Graduate School of Computer and Cognitive Sciences, Chukyo University, Japan miyasaka@grad.sccs.chukto-u.ac.jp,
DEVELOPMENT OF REAL TIME 3-D MEASUREMENT SYSTEM USING INTENSITY RATIO METHOD Takeo MIYASAKA and Kazuo ARAKI Graduate School of Computer and Cognitive Sciences, Chukyo University, Japan miyasaka@grad.sccs.chukto-u.ac.jp,
Real-Time Human Detection using Relational Depth Similarity Features
 Real-Time Human Detection using Relational Depth Similarity Features Sho Ikemura, Hironobu Fujiyoshi Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai, Aichi, 487-8501 Japan. si@vision.cs.chubu.ac.jp,
Real-Time Human Detection using Relational Depth Similarity Features Sho Ikemura, Hironobu Fujiyoshi Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai, Aichi, 487-8501 Japan. si@vision.cs.chubu.ac.jp,
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION
 CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
Announcements. Stereo
 Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
CS602 Midterm Subjective Solved with Reference By WELL WISHER (Aqua Leo)
") CS602 Midterm Subjective Solved with Reference By WELL WISHER (Aqua Leo) www.vucybarien.com Question No: 1 What are the two focusing methods in CRT? Explain briefly. Page no : 26 1. Electrostatic focusing
CS602 Midterm Subjective Solved with Reference By WELL WISHER (Aqua Leo) www.vucybarien.com Question No: 1 What are the two focusing methods in CRT? Explain briefly. Page no : 26 1. Electrostatic focusing
COMP 558 lecture 22 Dec. 1, 2010
 Binocular correspondence problem Last class we discussed how to remap the pixels of two images so that corresponding points are in the same row. This is done by computing the fundamental matrix, defining
Binocular correspondence problem Last class we discussed how to remap the pixels of two images so that corresponding points are in the same row. This is done by computing the fundamental matrix, defining
Dynamic Time Warping for Binocular Hand Tracking and Reconstruction
 Dynamic Time Warping for Binocular Hand Tracking and Reconstruction Javier Romero, Danica Kragic Ville Kyrki Antonis Argyros CAS-CVAP-CSC Dept. of Information Technology Institute of Computer Science KTH,
Dynamic Time Warping for Binocular Hand Tracking and Reconstruction Javier Romero, Danica Kragic Ville Kyrki Antonis Argyros CAS-CVAP-CSC Dept. of Information Technology Institute of Computer Science KTH,
3D shape from the structure of pencils of planes and geometric constraints
 3D shape from the structure of pencils of planes and geometric constraints Paper ID: 691 Abstract. Active stereo systems using structured light has been used as practical solutions for 3D measurements.
3D shape from the structure of pencils of planes and geometric constraints Paper ID: 691 Abstract. Active stereo systems using structured light has been used as practical solutions for 3D measurements.
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Mathematics 308 Geometry. Chapter 9. Drawing three dimensional objects
 Mathematics 308 Geometry Chapter 9. Drawing three dimensional objects In this chapter we will see how to draw three dimensional objects with PostScript. The task will be made easier by a package of routines
Mathematics 308 Geometry Chapter 9. Drawing three dimensional objects In this chapter we will see how to draw three dimensional objects with PostScript. The task will be made easier by a package of routines
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Midterm Exam Solutions
 Midterm Exam Solutions Computer Vision (J. Košecká) October 27, 2009 HONOR SYSTEM: This examination is strictly individual. You are not allowed to talk, discuss, exchange solutions, etc., with other fellow
Midterm Exam Solutions Computer Vision (J. Košecká) October 27, 2009 HONOR SYSTEM: This examination is strictly individual. You are not allowed to talk, discuss, exchange solutions, etc., with other fellow
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Structure from Motion. Prof. Marco Marcon
 Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
COMP 546. Lecture 11. Shape from X: perspective, texture, shading. Thurs. Feb. 15, 2018
 COMP 546 Lecture 11 Shape from X: perspective, texture, shading Thurs. Feb. 15, 2018 1 Level of Analysis in Perception high - behavior: what is the task? what problem is being solved? - brain areas and
COMP 546 Lecture 11 Shape from X: perspective, texture, shading Thurs. Feb. 15, 2018 1 Level of Analysis in Perception high - behavior: what is the task? what problem is being solved? - brain areas and