Computer Vision cmput 428/615
|
|
|
- Adelia Campbell
- 5 years ago
- Views:
Transcription




1 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand
2 The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations? Mathematically: Cartesian coordinates: (x, y, z) ( f x z, f y z ) Projectively: x = PX


3 Challenges in Computer Vision: What images don t provide lengths depth
4 Distant objects are smaller


5 Visual ambiguity Will the scissors cut the paper in the middle?



6 Ambiguity Will the scissors cut the paper in the middle? NO!
7 Visual ambiguity Is the probe contacting the wire?

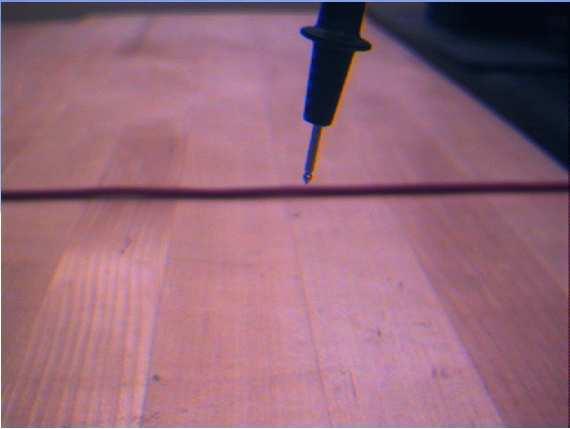
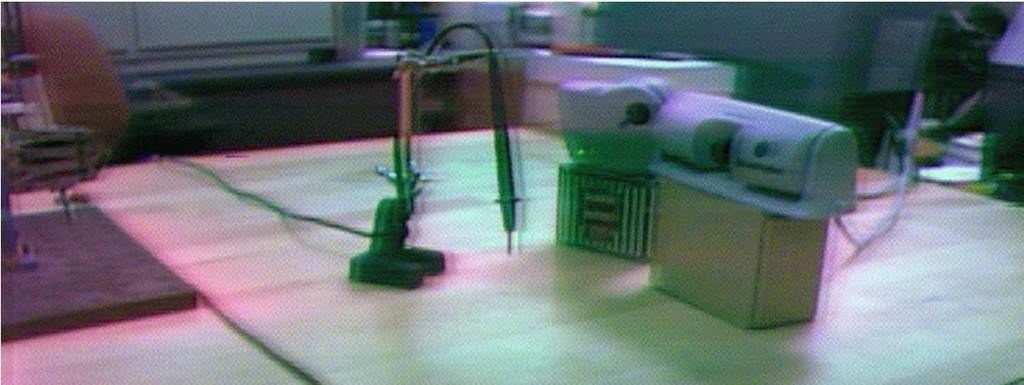
8 Ambiguity Is the probe contacting the wire? NO!


9 Visual ambiguity Is the probe contacting the wire?


10 Ambiguity Is the probe contacting the wire? NO!

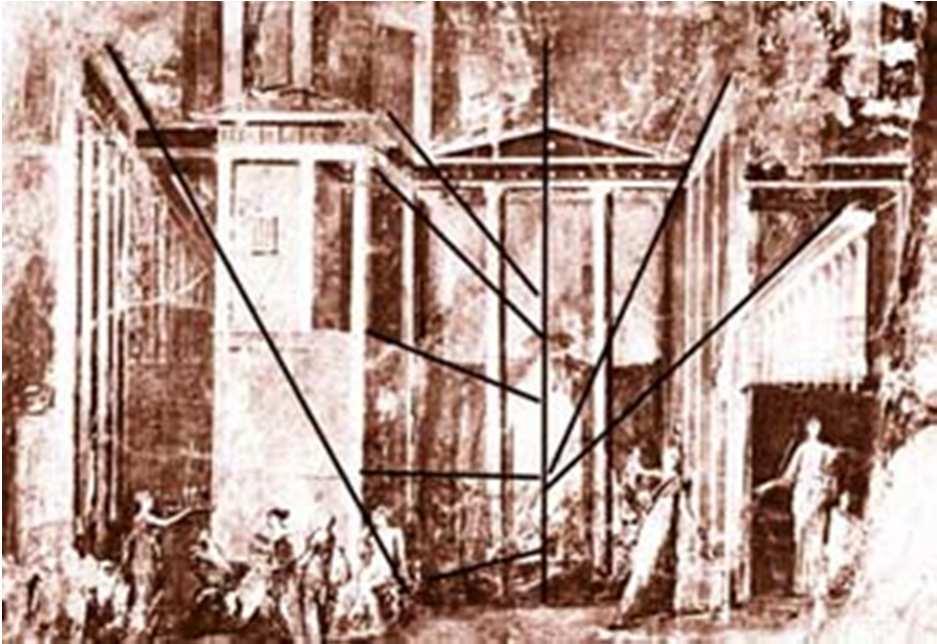
11 History of Perspective Prehistoric: Roman



12 Perspective: Da Vinci
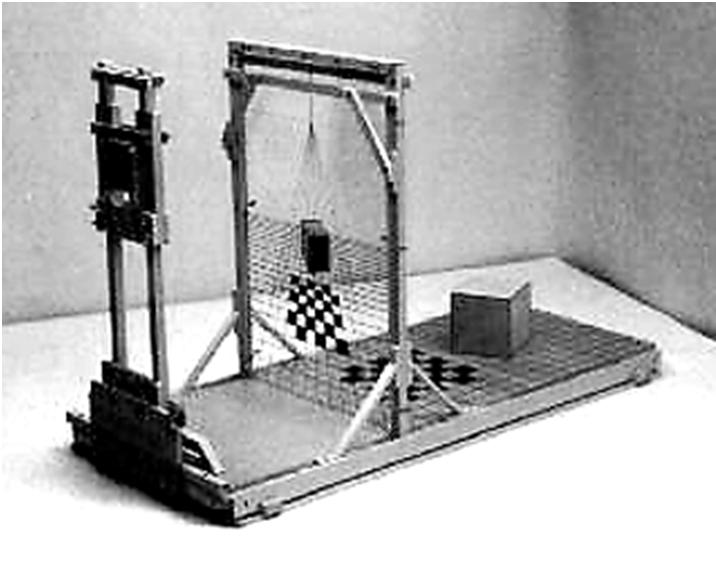
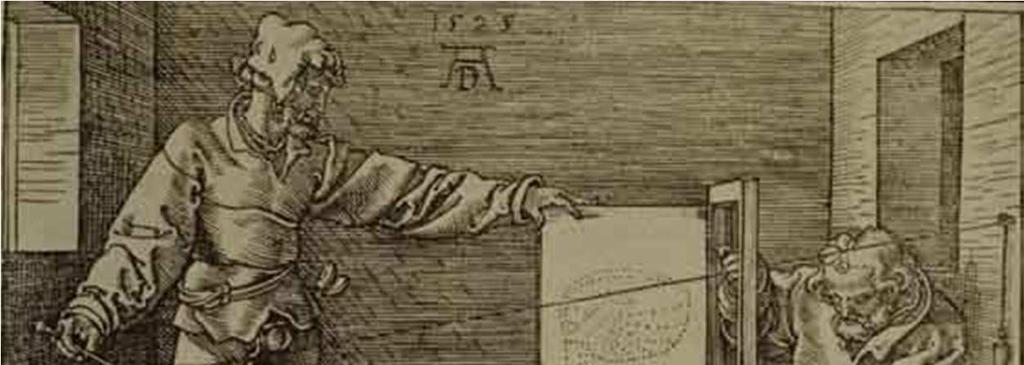
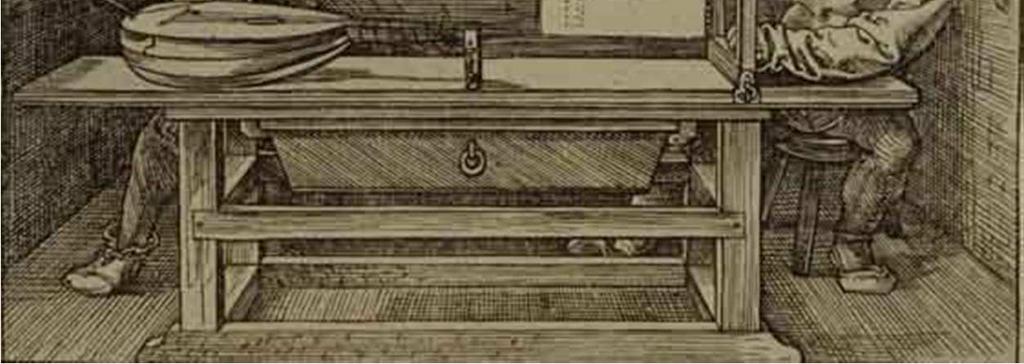
13 Visualizing perspective: Dürer Perspectograph 1500 s
14 Parallel lines meet Image plane common to draw image plane in front of the focal point Centre of projection 3D world
15 Perspective Imaging Properties Challenges with measurements in multiple images: Distances/angles change Ratios of dist/angles change Parallel lines intersect 90

16 What is preserved? Invariants: Points map to points Intersections are preserved Lines map to lines Collinearity preserved Ratios of ratios (cross ratio) Horizon horizon What is a good way to represent imaged geometry?
17 Vanishing points each set of parallel lines (=direction) meets at a different point The vanishing point for this direction How would you show this? Sets of parallel lines on the same plane lead to collinear vanishing points. The line is called the horizon for that plane
18 Geometric properties of projection Points go to points Lines go to lines Planes go to whole image Polygons go to polygons Degenerate cases line through focal point to point plane through focal point to line
19 Polyhedra project to polygons (because lines project to lines)
20 Junctions are constrained This leads to a process called line labelling one looks for consistent sets of labels, bounding polyhedra disadv - can t get the lines and junctions to label from real images
21 Back to projection Cartesian coordinates: (x, y, z) ( f x z, f y z ) We will develop a framework to express projection as x=px, where x is 2D image projection, P a projection matrix and X is 3D world point.
22 Basic geometric transformations: Translation A translation is a straight line movement of an object from one postion to another. A point (x,y) is transformed to the point (x,y ) by adding the translation distances T x and T y : x = x + T x y = y + T y z = z + T z
23 Coordinate rotation Example: Around y-axis p = [ x ] y z = cos 0 sin sin 0 cos [ x ] y z = R y p Z P X X
24 Euler angles Note: Successive rotations. Order matters. = [ cosϕ sinϕ ] 0 sinϕ cos ϕ R=R z R y R x cos 0 sin sin 0 cos cosψ sinψ 0 sinψ cos ψ
25 Rotation and translation Translation t in new o coordinates Z P p = cos 0 sin p + t sin 0 cos X X
26 Basic transformations Scaling A scaling transformation alters the scale of an object. Suppose a point (x,y) is transformed to the point (x',y') by a scaling with scaling factors S x and S y, then: x' = x S x y' = y S y z' = z S z A uniform scaling is produced if S x = S y = S z.
27 Basic transformations Scaling The previous scaling transformation leaves the origin unaltered. If the point (x f,y f ) is to be the fixed point, the transformation is: x' = x f + (x - x f ) S x y' = y f + (y - y f ) S y This can be rearranged to give: x' = x S x + (1 - S x ) x f y' = y S y + (1 - S y ) y f
28 Affine Geometric Transforms In general, a point in n-d space transforms by P = rotate(point) + translate(point) In 2-D space, this can be written as a matrix equation: x' y' = Cos( θ ) Sin( θ ) Sin( θ ) Cos( θ ) x y + tx ty In 3-D space (or n-d), this can generalized as a matrix equation: p = R p + T or p = R t (p T)
29 A Simple 2-D Example p = (0,1) p = (1,0) x' y' x' y' Cos( π / 4) = Sin( π / 4) Cos( π / 4) = Sin( π / 4) Sin( π / 4) 1 Cos( π / 4) 0 Suppose we rotate the coordinate system through 45 degrees (note that this is measured relative to the rotated system! x' y' x' y' Cos( π / 4) = Sin( π / 4) = Sin Cos ( π / 4) ( π / 4) Sin( π / 4) 0 Cos( π / 4) 1
30 Matrix representation and Homogeneous coordinates Often need to combine several transformations to build the total transformation. So far using affine transforms need both add and multiply Good if all transformations could be represented as matrix multiplications then the combination of transformations simply involves the multiplication of the respective matrices As translations do not have a 2 x 2 matrix representation, we introduce homogeneous coordinates to allow a 3 x 3 matrix representation.
31 How to translate a 2D point: Old way: New way:
32 Relationship between 3D homogeneous and inhomogeneous The Homogeneous coordinate corresponding to the point (x,y,z) is the triple (x h, y h, z h, w) where: x h = wx y h = wy z h = wz We can (initially) set w = 1. Suppose a point P = (x,y,z,1) in the homogeneous coordinate system is mapped to a point P' = (x',y',z,1) by a transformations, then the transformation can be expressed in matrix form.
33 Matrix representation and Homogeneous coordinates For the basic transformations we have: Translation Scaling P = P = x y z w x y z w = = T x T y T z s x s y s z x y z w x y z w
34 Geometric Transforms Using the idea of homogeneous transforms, we can write: p' = 0 R 0 0 T R and T both require 3 parameters. 1 p R = [ cosϕ sinϕ ] 0 sinϕ cosϕ cos 0 sin sin 0 cos cosψ sinψ 0 sinψ cosψ
35 Geometric Transforms If we compute the matrix inverse, we find that ' ' ' p R T R p = R and T both require 3 parameters. These correspond to the 6 extrinsic parameters needed for camera calibration
36 Rotation about a Specified Axis It is useful to be able to rotate about any axis in 3D space This is achieved by composing 7 elementary transformations (next slide)
37 Rotation through θ about Specified Axis y P2 y y z y P1 x initial position z y x translate P1 to origin z x rotate so that P2 lies on z-axis (2 rotations) y P2 z x rotate through requ d angle, θ z x rotate axis z to orig orientation P1 x translate back
38 Comparison: Homogeneous coordinates Rotations and translations are represented in a uniform way Successive transforms are composed using matrix products: y = Pn*..*P2*P1*x Affine coordinates Non-uniform representations: y = Ax + b Difficult to keep track of separate elements
39 Camera models and projections Geometry part 2. x Using geometry and homogeneous transforms to describe: Perspective projection Weak perspective projection Orthographic projection y z y x
40 The equation of projection Cartesian coordinates: We have, by similar triangles, that (x, y, z) -> (f x/z, f y/z, -f) Ignore the third coordinate, and get (x, y, z) ( f x z, f y z )
41 The camera matrix Homogenous coordinates for 3D four coordinates for 3D point equivalence relation (X,Y,Z,T) is the same as (k X, k Y, k Z,k T) Turn previous expression into HC s HC s for 3D point are (X,Y,Z,T) HC s for point in image are (U,V,W) U V W = f 0 X Y Z T ), ( ), ( ),, ( v u W V W U W V U =
42 Camera parameters Issue camera may not be at the origin, looking down the z-axis extrinsic parameters one unit in camera coordinates may not be the same as one unit in world coordinates intrinsic parameters - focal length, principal point, aspect ratio, angle between axes, etc. U V W = Transforma tion representi ng intrinsic parameters Transforma tion Transforma tion representi ng representi ng projection model extrinsic parameters Note: f moved from proj to intrinsics! X Y Z T
43 Intrinsic Parameters Intrinsic Parameters describe the conversion from metric to pixel coordinates (and the reverse) x mm = - (x pix o x ) s x y mm = - (y pix o y ) s y p M w y x o s f o s f w y x mm y y x x pix int / 0 0 / = = or Note: Focal length is a property of the camera and can be incorporated as above


44 Example: A real camera Laser range finder Camera
45 Relative location Camera-Laser Camera Laser R=10deg T=(16,6,-9)
46 In homogeneous coordinates Rotation: Translation R = cos 10 0 sin sin 10 0 cos 10 T =
47 Full projection model Camera internal parameters Camera projection p camera = ( )( ) Extrinsic rot and translation = ( )
48 Camera parameters Issue camera may not be at the origin, looking down the z-axis extrinsic parameters one unit in camera coordinates may not be the same as one unit in world coordinates intrinsic parameters - focal length, principal point, aspect ratio, angle between axes, etc. U V W = Transforma tion representi ng intrinsic parameters Transforma tion Transforma tion representi ng representi ng projection model extrinsic parameters Note: f moved from proj to intrinsics! X Y Z T


49 Result Camera image Laser measured 3D structure
50 Hierarchy of different camera models x orth x wp x parap x persp Image plane Object plane X 0 (origin) Camera center Perspective: non-linear Weak perspective: linear approx Orthographic: lin, no scaling Para-perspective: lin
51 Orthographic projection u v = = x y
52 The fundamental model for orthographic projection U V W = X Y Z T


53 Perspective and Orthographic Projection perspective Orthographic (parallel)
54 Weak perspective Issue perspective effects, but not over the scale of individual objects u v T = = Tx Ty = f / Z collect points into a group at about the same depth, then divide each point by the depth of its group Adv: easy Disadv: wrong
55 The fundamental model for weak perspective projection = T Z Y X Z f W V U * / Note Z* is a fixed value, usually mean distance to scene
56 Weak perspective projection = k t t y x 1/ 0 r r 1 α α P 2 2T 1 1T (7dof) Weak perspective projection for an arbitrary camera pose R,t
57 Full Affine linear camera Affine camera (8dof) 1T α x s r t1 m11 2T PA = α y r t 2 A = m / k P A = 3 3 affine affine [ ] [ ] 1. Affine camera=camera with principal plane coinciding with Π 2. Affine camera maps parallel lines to parallel lines 3. No center of projection, but direction of projection P A D=0 (point on Π ) m m 0 m m 0 t1 t P
58 Hierarchy of camera models Camera center Image plane Object plane X 0 (origin) x persp Perspective: x parap Para-perspective: First order approximation of perspective = z y x persp t t t f f P k j i 1 x orth Orthographic: = 1 T y x orth t t P 0 j i Weak perspective: x wp = 1 1 T y x wp t t k k P 0 j i
59 Camera Models Internal calibration: Weak calibration: Affine calibration: Stratification of stereo vision: - characterizes the reconstructive certainty of weakly, affinely, and internally calibrated stereo rigs C sim up to a similarity (scaled Euclidean transformation) C aff up to an affine transformation of task space C proj up to a projective transformation of task space C inj reconstruction up to a bijection of task space
60 Visual Invariance sim aff aff proj proj proj inj inj inj inj
61 Perspective Camera Model Structure Assume R and T express camera in world coordinates, then p R T R p w c = ' ' Combining with a perspective model (and neglecting internal parameters) yields p f R T T R T R f R R R p M u w z y x z y x w c = = ' ' ' ' Note the M is defined only up to a scale factor at this point! If M is viewed as a 3x4 matrix defined up to scale, it is called the projection matrix.
62 Perspective Camera Model Structure Assume R and T express camera in world coordinates, then p R T R p w c = ' ' Combining with a weak perspective model (and neglecting internal parameters) yields p f T P R T R T R R R p M u w z y x y x w c = = ) ( ' ' 0 ' ' Where is the nominal distance to the viewed object P
63 Other Models The affine camera is a generalization of weak perspective. The projective camera is a generalization of the perspective camera. Both have the advantage of being linear models on real and projective spaces, respectively. But in general will recover structure up to an affine or projective transform only. (ie distorted structure)
64 Camera Internal Calibration Recall: Intrinsic Parameters Intrinsic Parameters describe the conversion from metric to pixel coordinates (and the reverse) x mm = - (x pix o x ) s x y mm = - (y pix o y ) s y p M w y x o s o s w y x mm y y x x pix int / 0 0 1/ = = or

65 CAMERA INTERNAL CALIBRATION Compute Sx Known distance d Focal length = 1/ Sx rki = ( x d r ( x d = i i+ 1 o x x i ) s ) s x x known regular offset r A simple way to get scale parameters; we can compute the optical center as the numerical center and therefore have the intrinsic parameters
66 Camera calibration Issues: what are intrinsic parameters of the camera? what is the camera matrix? (intrinsic+extrinsic) General strategy: view calibration object identify image points obtain camera matrix by minimizing error obtain intrinsic parameters from camera matrix Error minimization: Linear least squares easy problem numerically solution can be rather bad Minimize image distance more difficult numerical problem solution usually rather good, but can be hard to find start with linear least squares Numerical scaling is an issue


67 GOAL: Passive 2- camera system for triangulating 3D position of points in space to generate a depth map of a world scene. Humans use stereo vision to obtain depth Stereo Vision
68 Stereo depth calculation: Simple case, aligned cameras DISPARITY= (XL - XR) Similar triangles: Z = (f/xl) X Z= (f/xr) (X-d) Z Solve for X: (f/xl) X = (f/xr) (X-d) X = (XL d) / (XL - XR) Solve for Z: f XL XR Z = d*f (XL - XR) (0,0) (d,0) X


69 Epipolar constraint Special case: parallel cameras epipolar lines are parallel and aligned with rows
70 Stereo measurement example: Left image Resolution = 1280 x 1024 pixels f = 1360 pixels Right image Baseline d = 1.2m Q: How wide is the hallway
71 How wide is the hallway? General strategy Similar triangles: W = Z Need depth Z v f Then solve for W W Z v f
72 How wide is the hallway? Steps in solution: 1. Compute focal length f in meters from pixels 2. Compute depth Z using stereo formula (aligned camera planes) Z = d*f (XL - XR) 3. Compute width: W = Z v f
73 Focal length: Here screen projection is metric image plane. f = 1360 pixels f = *0.224 = 0.238m 0.224m is 1280 pixels
74 How wide Depth calculation XL = 0.144m XR = 0.074m Disparity: XL XR = 0.07m (Note in the disparity calculation the choice of reference (here the edge) doesn t matter. But in the case of say X-coordinate calculation it should be w.r.t. the center of the image as in the stereo formula derivation Depth 1.2*0.238 Z = = 4. 1m 0.07



75 Similar triangles: How wide? Answer: W = Z The width of the hallway is: v f W = 4.1* = 2. 3m V = 0.135m W Z v f
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Remember: The equation of projection. Imaging Geometry 1. Basic Geometric Coordinate Transforms. C306 Martin Jagersand
 Imaging Geometr 1. Basic Geometric Coordinate Transorms emember: The equation o rojection Cartesian coordinates: (,, z) ( z, z ) C36 Martin Jagersand How do we develo a consistent mathematical ramework
Imaging Geometr 1. Basic Geometric Coordinate Transorms emember: The equation o rojection Cartesian coordinates: (,, z) ( z, z ) C36 Martin Jagersand How do we develo a consistent mathematical ramework
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Computer Vision Projective Geometry and Calibration
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Camera Projection Models We will introduce different camera projection models that relate the location of an image point to the coordinates of the
 Camera Projection Models We will introduce different camera projection models that relate the location of an image point to the coordinates of the corresponding 3D points. The projection models include:
Camera Projection Models We will introduce different camera projection models that relate the location of an image point to the coordinates of the corresponding 3D points. The projection models include:
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Computer Vision. Coordinates. Prof. Flávio Cardeal DECOM / CEFET- MG.
 Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
3D Sensing and Reconstruction Readings: Ch 12: , Ch 13: ,
 3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Interactive Computer Graphics. Hearn & Baker, chapter D transforms Hearn & Baker, chapter 5. Aliasing and Anti-Aliasing
 Interactive Computer Graphics Aliasing and Anti-Aliasing Hearn & Baker, chapter 4-7 D transforms Hearn & Baker, chapter 5 Aliasing and Anti-Aliasing Problem: jaggies Also known as aliasing. It results
Interactive Computer Graphics Aliasing and Anti-Aliasing Hearn & Baker, chapter 4-7 D transforms Hearn & Baker, chapter 5 Aliasing and Anti-Aliasing Problem: jaggies Also known as aliasing. It results
COMP30019 Graphics and Interaction Three-dimensional transformation geometry and perspective
 COMP30019 Graphics and Interaction Three-dimensional transformation geometry and perspective Department of Computing and Information Systems The Lecture outline Introduction Rotation about artibrary axis
COMP30019 Graphics and Interaction Three-dimensional transformation geometry and perspective Department of Computing and Information Systems The Lecture outline Introduction Rotation about artibrary axis
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Sameer Agarwal LECTURE 1 Image Formation 1.1. The geometry of image formation We begin by considering the process of image formation when a
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Sameer Agarwal LECTURE 1 Image Formation 1.1. The geometry of image formation We begin by considering the process of image formation when a
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Augmented Reality II - Camera Calibration - Gudrun Klinker May 11, 2004
 Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
CS 664 Slides #9 Multi-Camera Geometry. Prof. Dan Huttenlocher Fall 2003
 CS 664 Slides #9 Multi-Camera Geometry Prof. Dan Huttenlocher Fall 2003 Pinhole Camera Geometric model of camera projection Image plane I, which rays intersect Camera center C, through which all rays pass
CS 664 Slides #9 Multi-Camera Geometry Prof. Dan Huttenlocher Fall 2003 Pinhole Camera Geometric model of camera projection Image plane I, which rays intersect Camera center C, through which all rays pass
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
Machine vision. Summary # 11: Stereo vision and epipolar geometry. u l = λx. v l = λy
 1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
Structure from Motion. Prof. Marco Marcon
 Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Graphics and Interaction Transformation geometry and homogeneous coordinates
 433-324 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
433-324 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
Prof. Feng Liu. Fall /19/2016
 Prof. Feng Liu Fall 26 http://www.cs.pdx.edu/~fliu/courses/cs447/ /9/26 Last time More 2D Transformations Homogeneous Coordinates 3D Transformations The Viewing Pipeline 2 Today Perspective projection
Prof. Feng Liu Fall 26 http://www.cs.pdx.edu/~fliu/courses/cs447/ /9/26 Last time More 2D Transformations Homogeneous Coordinates 3D Transformations The Viewing Pipeline 2 Today Perspective projection
COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates
 COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
Multiple Views Geometry
 Multiple Views Geometry Subhashis Banerjee Dept. Computer Science and Engineering IIT Delhi email: suban@cse.iitd.ac.in January 2, 28 Epipolar geometry Fundamental geometric relationship between two perspective
Multiple Views Geometry Subhashis Banerjee Dept. Computer Science and Engineering IIT Delhi email: suban@cse.iitd.ac.in January 2, 28 Epipolar geometry Fundamental geometric relationship between two perspective
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction
 Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Camera models and calibration
 Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
2D Image Transforms Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") 2D Image Transforms 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Extract features from an image what do we do next? Feature matching (object recognition, 3D reconstruction, augmented
2D Image Transforms 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Extract features from an image what do we do next? Feature matching (object recognition, 3D reconstruction, augmented
Rectification and Disparity
 Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Image formation. Thanks to Peter Corke and Chuck Dyer for the use of some slides
 Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Discriminant Functions for the Normal Density
 Announcements Project Meetings CSE Rm. 4120 HW1: Not yet posted Pattern classification & Image Formation CSE 190 Lecture 5 CSE190d, Winter 2011 CSE190d, Winter 2011 Discriminant Functions for the Normal
Announcements Project Meetings CSE Rm. 4120 HW1: Not yet posted Pattern classification & Image Formation CSE 190 Lecture 5 CSE190d, Winter 2011 CSE190d, Winter 2011 Discriminant Functions for the Normal
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Chapter 2 - Basic Mathematics for 3D Computer Graphics
 Chapter 2 - Basic Mathematics for 3D Computer Graphics Three-Dimensional Geometric Transformations Affine Transformations and Homogeneous Coordinates Combining Transformations Translation t + t Add a vector
Chapter 2 - Basic Mathematics for 3D Computer Graphics Three-Dimensional Geometric Transformations Affine Transformations and Homogeneous Coordinates Combining Transformations Translation t + t Add a vector
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
Lecture 9: Epipolar Geometry
 Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration
 MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration Image formation How are objects in the world captured in an image? Phsical parameters of image formation Geometric Tpe of projection Camera
MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration Image formation How are objects in the world captured in an image? Phsical parameters of image formation Geometric Tpe of projection Camera
Specifying Complex Scenes
 Transformations Specifying Complex Scenes (x,y,z) (r x,r y,r z ) 2 (,,) Specifying Complex Scenes Absolute position is not very natural Need a way to describe relative relationship: The lego is on top
Transformations Specifying Complex Scenes (x,y,z) (r x,r y,r z ) 2 (,,) Specifying Complex Scenes Absolute position is not very natural Need a way to describe relative relationship: The lego is on top
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
2D/3D Geometric Transformations and Scene Graphs
 2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Unit 3 Multiple View Geometry
 Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Cameras and Radiometry. Last lecture in a nutshell. Conversion Euclidean -> Homogenous -> Euclidean. Affine Camera Model. Simplified Camera Models
 Cameras and Radiometry Last lecture in a nutshell CSE 252A Lecture 5 Conversion Euclidean -> Homogenous -> Euclidean In 2-D Euclidean -> Homogenous: (x, y) -> k (x,y,1) Homogenous -> Euclidean: (x, y,
Cameras and Radiometry Last lecture in a nutshell CSE 252A Lecture 5 Conversion Euclidean -> Homogenous -> Euclidean In 2-D Euclidean -> Homogenous: (x, y) -> k (x,y,1) Homogenous -> Euclidean: (x, y,
Introduction to Homogeneous coordinates
 Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
MAPI Computer Vision. Multiple View Geometry
 MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
Agenda. Perspective projection. Rotations. Camera models
 Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
Computer Graphics with OpenGL ES (J. Han) Chapter IV Spaces and Transforms
 Chapter IV Spaces and Transforms") Chapter IV Spaces and Transforms Scaling 2D scaling with the scaling factors, s x and s y, which are independent. Examples When a polygon is scaled, all of its vertices are processed by the same scaling
Chapter IV Spaces and Transforms Scaling 2D scaling with the scaling factors, s x and s y, which are independent. Examples When a polygon is scaled, all of its vertices are processed by the same scaling
UNIT 2 2D TRANSFORMATIONS
 UNIT 2 2D TRANSFORMATIONS Introduction With the procedures for displaying output primitives and their attributes, we can create variety of pictures and graphs. In many applications, there is also a need
UNIT 2 2D TRANSFORMATIONS Introduction With the procedures for displaying output primitives and their attributes, we can create variety of pictures and graphs. In many applications, there is also a need
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
3D Modeling using multiple images Exam January 2008
 3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
3D Mathematics. Co-ordinate systems, 3D primitives and affine transformations
 3D Mathematics Co-ordinate systems, 3D primitives and affine transformations Coordinate Systems 2 3 Primitive Types and Topologies Primitives Primitive Types and Topologies 4 A primitive is the most basic
3D Mathematics Co-ordinate systems, 3D primitives and affine transformations Coordinate Systems 2 3 Primitive Types and Topologies Primitives Primitive Types and Topologies 4 A primitive is the most basic
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
521466S Machine Vision Exercise #1 Camera models
 52466S Machine Vision Exercise # Camera models. Pinhole camera. The perspective projection equations or a pinhole camera are x n = x c, = y c, where x n = [x n, ] are the normalized image coordinates,
52466S Machine Vision Exercise # Camera models. Pinhole camera. The perspective projection equations or a pinhole camera are x n = x c, = y c, where x n = [x n, ] are the normalized image coordinates,
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Image warping , , Computational Photography Fall 2017, Lecture 10
 Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Projective geometry, camera models and calibration
 Projective geometry, camera models and calibration Subhashis Banerjee Dept. Computer Science and Engineering IIT Delhi email: suban@cse.iitd.ac.in January 6, 2008 The main problems in computer vision Image
Projective geometry, camera models and calibration Subhashis Banerjee Dept. Computer Science and Engineering IIT Delhi email: suban@cse.iitd.ac.in January 6, 2008 The main problems in computer vision Image
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
COS429: COMPUTER VISON CAMERAS AND PROJECTIONS (2 lectures)
") COS429: COMPUTER VISON CMERS ND PROJECTIONS (2 lectures) Pinhole cameras Camera with lenses Sensing nalytical Euclidean geometry The intrinsic parameters of a camera The extrinsic parameters of a camera
COS429: COMPUTER VISON CMERS ND PROJECTIONS (2 lectures) Pinhole cameras Camera with lenses Sensing nalytical Euclidean geometry The intrinsic parameters of a camera The extrinsic parameters of a camera
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
CSE152a Computer Vision Assignment 1 WI14 Instructor: Prof. David Kriegman. Revision 0
 CSE152a Computer Vision Assignment 1 WI14 Instructor: Prof. David Kriegman. Revision Instructions: This assignment should be solved, and written up in groups of 2. Work alone only if you can not find a
CSE152a Computer Vision Assignment 1 WI14 Instructor: Prof. David Kriegman. Revision Instructions: This assignment should be solved, and written up in groups of 2. Work alone only if you can not find a
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Epipolar Geometry and the Essential Matrix
 Epipolar Geometry and the Essential Matrix Carlo Tomasi The epipolar geometry of a pair of cameras expresses the fundamental relationship between any two corresponding points in the two image planes, and
Epipolar Geometry and the Essential Matrix Carlo Tomasi The epipolar geometry of a pair of cameras expresses the fundamental relationship between any two corresponding points in the two image planes, and
CS 4204 Computer Graphics
 CS 4204 Computer Graphics 3D Viewing and Projection Yong Cao Virginia Tech Objective We will develop methods to camera through scenes. We will develop mathematical tools to handle perspective projection.
CS 4204 Computer Graphics 3D Viewing and Projection Yong Cao Virginia Tech Objective We will develop methods to camera through scenes. We will develop mathematical tools to handle perspective projection.
Single View Geometry. Camera model & Orientation + Position estimation. What am I?
 Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
521493S Computer Graphics Exercise 2 Solution (Chapters 4-5)
") 5493S Computer Graphics Exercise Solution (Chapters 4-5). Given two nonparallel, three-dimensional vectors u and v, how can we form an orthogonal coordinate system in which u is one of the basis vectors?
5493S Computer Graphics Exercise Solution (Chapters 4-5). Given two nonparallel, three-dimensional vectors u and v, how can we form an orthogonal coordinate system in which u is one of the basis vectors?
More Mosaic Madness. CS194: Image Manipulation & Computational Photography. Steve Seitz and Rick Szeliski. Jeffrey Martin (jeffrey-martin.
 More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
2D and 3D Transformations AUI Course Denbigh Starkey
 2D and 3D Transformations AUI Course Denbigh Starkey. Introduction 2 2. 2D transformations using Cartesian coordinates 3 2. Translation 3 2.2 Rotation 4 2.3 Scaling 6 3. Introduction to homogeneous coordinates
2D and 3D Transformations AUI Course Denbigh Starkey. Introduction 2 2. 2D transformations using Cartesian coordinates 3 2. Translation 3 2.2 Rotation 4 2.3 Scaling 6 3. Introduction to homogeneous coordinates
Assignment 2 : Projection and Homography
 TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Stereo CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
3D reconstruction class 11
 3D reconstruction class 11 Multiple View Geometry Comp 290-089 Marc Pollefeys Multiple View Geometry course schedule (subject to change) Jan. 7, 9 Intro & motivation Projective 2D Geometry Jan. 14, 16
3D reconstruction class 11 Multiple View Geometry Comp 290-089 Marc Pollefeys Multiple View Geometry course schedule (subject to change) Jan. 7, 9 Intro & motivation Projective 2D Geometry Jan. 14, 16
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: :59AM
 CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
CSC 305 The Graphics Pipeline-1
 C. O. P. d y! "#"" (-1, -1) (1, 1) x z CSC 305 The Graphics Pipeline-1 by Brian Wyvill The University of Victoria Graphics Group Perspective Viewing Transformation l l l Tools for creating and manipulating
C. O. P. d y! "#"" (-1, -1) (1, 1) x z CSC 305 The Graphics Pipeline-1 by Brian Wyvill The University of Victoria Graphics Group Perspective Viewing Transformation l l l Tools for creating and manipulating
CSE328 Fundamentals of Computer Graphics
 CSE328 Fundamentals of Computer Graphics Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 794--44 Tel: (63)632-845; Fax: (63)632-8334 qin@cs.sunysb.edu
CSE328 Fundamentals of Computer Graphics Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 794--44 Tel: (63)632-845; Fax: (63)632-8334 qin@cs.sunysb.edu
Camera Pose Measurement from 2D-3D Correspondences of Three Z Shaped Lines
 International Journal of Intelligent Engineering & Systems http://www.inass.org/ Camera Pose Measurement from 2D-3D Correspondences of Three Z Shaped Lines Chang Liu 1,2,3,4, Feng Zhu 1,4, Jinjun Ou 1,4,
International Journal of Intelligent Engineering & Systems http://www.inass.org/ Camera Pose Measurement from 2D-3D Correspondences of Three Z Shaped Lines Chang Liu 1,2,3,4, Feng Zhu 1,4, Jinjun Ou 1,4,
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Robotics - Projective Geometry and Camera model. Marcello Restelli
 Robotics - Projective Geometr and Camera model Marcello Restelli marcello.restelli@polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano Ma 2013 Inspired from Matteo
Robotics - Projective Geometr and Camera model Marcello Restelli marcello.restelli@polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano Ma 2013 Inspired from Matteo
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg