Unsupervised Action Proposal Ranking through Proposal Recombination
|
|
|
- Victoria Jackson
- 5 years ago
- Views:
Transcription
1 Unsupervised Action Proposal Ranking through Proposal Recombination Waqas Sultani, Dong Zhang and Mubarak Shah Center for Research in Computer Vision, University of Central Florida, USA arxiv: v1 [cs.cv] 3 Apr 2017 Abstract Recently, action proposal methods have played an important role in action recognition tasks, as they reduce the search space dramatically. Most unsupervised action proposal methods tend to generate hundreds of action proposals which include many noisy, inconsistent, and unranked action proposals, while supervised action proposal methods take advantage of predefined object detectors (e.g., human detector) to refine and score the action proposals, but they require thousands of manual annotations to train. Given the action proposals in a video, the goal of the proposed work is to generate a few better action proposals that are ranked properly. In our approach, we first divide action proposal into sub-proposal and then use Dynamic Programming based graph optimization scheme to select the optimal combinations of sub-proposals from different proposals and assign each new proposal a score. We propose a new unsupervised image-based actioness detector that leverages web images and employ it as one of the node scores in our graph formulation. Moreover, we capture motion information by estimating the number of motion contours within each action proposal patch. The proposed method is an unsupervised method that neither needs bounding box annotations nor video level labels, which is desirable with the current explosion of large-scale action datasets. Our approach is generic and does not depend on a specific action proposal method. We evaluate our approach on several publicly available trimmed and un-trimmed datasets and obtain better performance compared to several proposal ranking methods. In addition, we demonstrate that properly ranked proposals Preprint submitted to Computer Vision and Image Understanding April 5, 2017
2 produce significantly better action detection as compared to state-of-the-art proposal based methods. Keywords: Action Proposal Ranking, Action Recognition, Unsupervised Method 1. Introduction Spatio-Temporal detection of human actions in real-world videos is one of the most challenging problems in computer vision. Taking page from object detection in images, several action detection methods have been introduced for videos [1, 2, 3, 4, 5, 6]. Following the success of sliding window-based approaches for images, authors in [1, 2] used sliding windows for action detection/localization in videos. However, videos have much larger search space as compared to images (for instance, the number of 3D bounding boxes (or tubes) is O(w 2 h 2 t 2 ) for a video of size w h with t frames). Moreover, these 3D boxes may contain large portion of background and cannot fully capture complex articulations of human actions. Therefore, several action proposal methods have been introduced [4, 7, 5, 8, 9] in recent years to reduce the search space and improve action localization accuracy. These methods rely heavily on video segmentation [7, 4, 9] or clustering of motion trajectories [10, 5]. These methods not only improve efficiency but also improve the accuracy of detection by reducing false positive rate. Since these methods use hierarchical segmentation or clustering, they tend to generate thousands of action proposals in each video, where many of proposals are noisy and do not contain action. Moreover, these methods utilize low-level color, motion and saliency cues but ignore high-level action cues, which make them difficult to generate actioness score for each proposal. Hence, the classification methods treat all proposals equally. Fully supervised action proposal methods such as [8] employ thousands of manual human annotations and use motion information from training videos to obtain ranked action proposals. However, with the recent explosive growth of action datasets [11], it is prohibitive to obtain bounding box annotations for each video, thus the application of fully supervised action proposal methods is limited. In this paper, we address the above-mentioned limitations of action proposals methods. We do not propose any new action proposal method. Instead, given the output of 2
3 any recent action proposal method [7, 4, 5], our goal is to generate a few new action proposals which are properly ranked according to how well they localize an action. The proposed method assigns an accurate actioness score to each proposal, without using any labeled data (no human detection [8] or bounding box annotations), thus is easier to generalize to other datasets. The proposed approach begins with dividing each proposal into sub-proposals. We assume that the quality of proposal remains the same within each sub-proposal. We, then employ a graph optimization method to recombine the sub-proposals in all action proposals in a single video in order to optimally build new action proposals and rank them by the combined node and edge scores. The node score is a combination of image-based actioness score (or image actioness; since this is computed for an image, not a video) and motion scores. The image-based actionnes scores are obtained by a deep network trained on web images. The training data is obtained without manual annotation by an automatic image co-localization method. In essence, the trained deep network is a generic image actioness detector rather than a specific action detector. The motion scores are obtained by measuring the number of motion contours enclosed by each proposal bounding box patch. The edge scores between sub-proposals are computed by the overlap ratio and appearance similarity of temporally neighboring sub-proposals. Note that edges are made between temporally adjacent sub-proposals. For an untrimmed video, we first divide the video into shots and then make the abovementioned graph within each shot. Our method generates a few ranked proposals that can be better than all the existing underlying proposals. Our experimental results validated that the properly ranked action proposals can significantly boost action detection results. Our method is summarized in Figure 1. The rest of the paper is organized as follows. In Section 2, the related work on action and object proposals is introduced. Section 3 presents how we score and rank action proposals in order to obtain fewer but better proposals. In Section 4, we quantitatively evaluate proposal ranking, contributions of different components and effect of properly ranked proposals on action detection. We conclude in Section 5. 3
4 Proposal 1 (a) Original Proposals Sub-proposal 1 Sub-proposal 2 Sub-proposal 3 Sub-proposal 4 (b) Proposal Patch Graph Unary Score: Actionness + Motion Proposal 2 Proposal 3 Frame index: Binary Score: Appearance + Overlap New Proposal 1 New Proposal 2 New Proposal 3 (d) Recombined Proposals (c) Selected Paths Figure 1: An illustration of the proposed method. In this illustration, there are 3 action proposals with 8 frames each. (a) shows the sub-proposal patches of the original action proposals. (b) shows the corresponding graph. Each node in (b) represents one sub-proposal, and edges represent the consistencies between the nodes. (c) shows the 3 top selected paths in the graph (in the order of blue, red, and purple). (d) shows the ranked new action proposals corresponding to the graph in (c), and it is easy to see that these are much better than the original proposals in (a). 2. Related work Till the last few years, most object detection methods used sliding window approaches [12]. In order to reduce search space and computation complexity of sliding window approach, several improvements have been made [13, 14]. The most popular approach in this direction is to use object proposals [15, 16, 13, 17]. An object proposal provides category independent candidate object location which might contain an object. Due to their high recall and efficiency, it is not surprising that most of the successful object detection approaches use object proposals as their pre-processing steps [18]. Although quite successful, the object proposal methods have two main limitations: 1) They tend to generate thousands of candidate object locations, where many of these locations either do not contain any object or enclose only a part of object; 2) Since 4
5 proposals are used as a pre-processing step, if an object is missed at this step, irrespective of robustness of object detection method, that object can never be detected. Ku et al. [19] pointed out that the small number of properly ranked proposals can have a significant impact on efficiency and quality of object detection system. The authors in [19] proposed to rank object proposals using a light weight CNN network trained on carefully obtained ground truth annotations. More recently, Zhong et al. [20] utilized semantic, contextual and low-level cues in a fully supervised approach to re-rank object proposals. Following the line of object detection research, [1, 21] proposed to detect complex human actions in videos using sliding window search in spatio-temporal space. Tian et al. [1] introduced 3D version of [12] and used spatio-temporal parts to detect action. Yu et al. [21] used a branch and bound method to efficiently search action volumes. As videos have much larger search space than images and fixed sized video sub-volumes are unable to capture spatio-temporal articulation of actions; several action proposal methods have been proposed recently[4, 7, 5, 8]. Following selective search based object proposal method [13] in images, Jain et al. [4] presented a video based action proposal method using motion information. The method [4] starts with supervoxel segmentation [22], followed by a hierarchical grouping method using motion, color and texture cues. The method shows improved action classification results compared to several sliding window alternatives. Similarly, Oneata et al. [7] extend [17] from images to videos and introduced randomized supervoxel segmentation method for proposal generation. Although both methods [7, 4] produce good quality proposals, they are computationally expensive due to their dependencies on supervoxel segmentation. Recently, [5, 8] presented a faster method for generating action proposals by removing supervoxel segmentation altogether. Yu et al. [8] generated action proposals using supervised human detector and connecting human detection boxes across multiple frames. In addition to action proposals, authors in [8] also produce a probability of actioness for each proposal. Van Gemert et al. in [5] employ dense trajectory features [10] and produce accurate action proposals by clustering [23] dense trajectory features. This method has shown good action classification results as compared to several baseline methods on many challenging datasets. Inspired by the success of deep learning 5
6 features for object detection [18], Gkioxari et al. [3] proposed to use two stream network using object proposals [13]. They link the high scored action boxes across frames to find action tubes. Weinzaepfel et al. [24] employ tracking by detection approach to obtain action localization using CNN features and motion histograms. Similar to objectness score [15], Wei et al. [25] introduced a supervised method using lattice conditional random field to estimate the actioness of the region in frames of videos. Limin et al. [26] presented hybrid convolution neural network based method to compute the probability of actioness. However, these methods require lots of carefully obtained manual annotations. Similar to object proposals, action proposals tend to generate hundreds or thousands of action proposals; however, only a few of them contain action. Moreover, while most object proposal methods [13, 19, 16, 15] produce objectness scores (or ranking) for the proposals; however, most action proposal methods [4, 5, 7] do not produce actioness scores (or ranking), and [8] is among the few outliers. In order to obtain a properly ranked action proposals and discover the most action representative proposal, Siva et al. [27] proposed to use negative mining approach. Specifically, they utilized videos with the labels other than the label of interest and select the proposal whose distance to the nearest neighbor in negative videos is the maximum. Tang et al [28] presented an approach to obtain ranked proposals using negative videos similar to [27], but they used more robust criterion by using all negative proposals. Using ranked proposals, they have shown excellent results for weakly supervised object segmentation in videos. Recently, Sultani and Shah [29] used web images to rank action proposal in action videos. Although these methods have shown improved ranking results, they are weakly supervised and hence needs video level labels. Moreover, if the action location is missed by underlying proposal generation method, these ranking methods cannot discover missed action location as they just do the ranking. In contrast, given action proposals, we propose to automatically obtain only a few properly ranked action proposals. Our approach is unsupervised as it needs neither bounding box annotations nor video level labels. Moreover, due to the recombination of sub-proposals across different proposals, it has the ability to discover new proposals that can be better than all of the initially generated proposals. 6
7 3. Action Proposal Recombination and Ranking The proposed approach for action proposal ranking starts by obtaining candidate action proposals and then recombines them in order to get fewer but better-ranked proposals. Since the number of candidate action proposals is huge in number and many proposals are noisy, in order to obtain robust ranking, we divide each proposal into sub-proposals and build a graph across the proposals with the sub-proposals as the nodes. The node score of the graph is a combination of image-based actioness score and motion score. Edges between nodes impose the frame consistencies, and their scores are a combination of intersection-over-union and appearance similarity between sub-proposals. The action proposals are generated and ranked in an iterative manner: to maximize the node+edge scores.the combined node+edge score is assigned to each proposal as its score. After selection of this proposal, all related nodes are removed from the graph and the next proposal is selected in the same way. This is an iterative process and it can produce and rank an arbitrary number of action proposals as needed. Note that our method is not limited to any specific methods for generating candidate action proposals; any recent action proposal method [8, 7, 4, 5] can be employed within the framework. In experiments, we demonstrate the superior performance of our approach using initial proposals obtained from three different proposal methods. In what follows, we introduce the graph formulation in Section 3.1, and explain the node and edge scores, respectively, in Sections 3.1.1, 3.1.2, and Graph Formulation We formulate the problem of action proposal ranking as a graph optimization problem (Fig. 1). The graph G = {V, E} consists of a set of nodes V = {v f i i = 1..N, f = 1...F } and edges E = {e f i,j i, j = 1...N, f = 1...F }, where i, j are the proposal indices, f is the sub-proposal index, N is the number of action proposals and F is the number of sub-proposals in the video. In order to obtain sub-proposals, we divide video into five equal temporal segments. stable across several different number of sub-proposals. Note that the accuracy of our approach is 7
8 Node scores are defined as Φ = λ i Φ i + λ m Φ m, (1) where Φ a and Φ m are the image-based actioness score and motion score respectively. λ a and λ m are the corresponding weights for each term. The edge scores are defined as Ψ = λ o Ψ o + λ a Ψ a, (2) where Ψ a, Ψ o are the appearance similarity and shape consistency scores, and λ a, λ o are the weight adjustments accordingly. Combining the node and edge scores we get as follows: E(P ) = F (Φ f p f + λ Ψ f (p f,p f+1 )), (3) f=1 where P = {p 1,..., p F } are the sub-proposal indices selected to make one proposals, Φ f i is the node score of ith proposal in f sub-proposal, Ψf (i,j) is the edge score for the edge that connects two ith and jth proposal in temporally adjacent sub-proposals, and Ψ F (.,.) is: = 0 (i.e. just to ensure the notation to be consistent for the last frame). The goal P = arg max E(P ). (4) P Our aim now is to select optimal paths through this graph. The graph G in Fig. 1 is a directed acyclic graph and the solution for Eqn. 4 can be obtained in polynomial time using dynamic programming [30], we use the value of this function to rank different proposals. After each iteration, the selected nodes are removed, and the next subset of nodes is selected using the same process until a specific number of action proposals are obtained. Each term of the node score Φ in Eqn. 1 and edge score Ψ in Eqn. 2 is introduced in next two sections Image-based actioness score The objective of image-based actioness score is to provide a probability score for each proposal patch to measure whether or not some action is being performed there. 8
9 In contrast to generic object-ness, little work has been done for the generic imagebased actioness score (also sometimes called actioness). It is well known that different actions share much high-level articulation and semantic information. Many actions, for instance, walking, jogging, running, kicking, diving, swinging, share similar patterns of motion in different images of the videos. Therefore, we believe that learning a generic image-based action detector for all actions can robustly provide us a probability of the presence of some action in an image. Training a actioness detector from videos is a daunting task, as it requires a large number of spatio-temporal annotated frames of actions. In that case, generic action detector is practically useless since one would expect that training generic action detector should be easy as compared to training specific action detector. Fortunately, recent works [31, 29] have demonstrated that deep network trained on images can also provide good classification and localization results in videos. Since that obtaining the bounding box annotations of images is less expensive than for videos, we employ images for the actioness detector. It is still a cumbersome task to get enough bounding box image annotations for a deep network. Therefore, we leverage the internet to obtain relevant images. However, a simple search for human and person does not work well since it results in producing images contain faces or simple standing people. In contrast, by searching action terms ( man walking, cricket bowling, swing, etc.), top retrieved images contain good quality, well-centered action images that capture the key poses and distinct articulation of actions. Therefore, these images can be a good source for training an actioness detector. Positive Images for Image Actioness Detector. We use UCF-Sports (10 actions) [32] action names to download action images from Google. To avoid ambiguity in a text query, we changed some action names slightly, for example using, soccer kicking instead of kicking, men walking instead of walk. In order to cope with noisy images and backgrounds within images, we used following pre-processing steps [29]. Noisy Image Removal. Since most of the retrieved images belong to the same concept (the textual query), they form a dense cluster in a feature space [33]. On the other hand, outliers are usually far away from dense clusters or make small clusters. To 9
 Single-image Actionness Detector Figure 2:")
 shows some action images downloaded from Google.")




![[35] and make a fully connected graph between all the images.](/docs-images/88/115058644/images/10-6.jpg "The transition probability of random walk on this graph from")
 ψ(j) 2 k.")
 where s k represents similarity score of image j at k th")



10 (b) Positive Patches AlexNet (a) Action Images (c) Negative Patches (d) Single-image Actionness Detector Figure 2: Single-image actioness detection. (a) shows some action images downloaded from Google. (b) shows the positive patches obtained by unsupervised bounding box generation. (c) shows some of the low optical flow negative patches obtained from UCF-Sports videos. (d) is the Alexnet based actioness detector. remove these outliers, we employed random walk, which is well proven to be good at getting rid of outliers in such scenarios [34]. We represent each image with 16-layer VGG features, ψ, [35] and make a fully connected graph between all the images. The transition probability of random walk on this graph from image i to image j is given by p(i, j) = The random walk over the graph is then formulated as: e α ψ(i) ψ(j) 2 k. (5) m=1 e α ψ(i) ψ(m) 2 s k (j) = γ i s k 1 (i)p ij + (1 β)z j, (6) where s k represents similarity score of image j at k th iteration. We use the same initial probability z j for each image. After a fixed number of iterations, we remove the images that receive lower confidence. Unsupervised Bounding Boxes Generation. Action images that contain actors with significant background may hurt the performance of the classifier. In order to get rid of the background and capture actual action (the common pattern across images), we employ an unsupervised localization approach similar to [36]. First, for all images of the same action, the nearest neighbors are computed using GIST features and then part 10

 shows the failure cases.")

.")
 on image patches and remove low consistency noisy patches.")




, we fine-tune Alexnet [37] to obtain We use around 6,000 positive and negative")
11 (a) (b) (c) (d) (e) Figure 3: Automatically obtained bounding boxes using multiple images. We used these automatically obtained bounding boxes to train our actioness detector. Last column (right) shows the failure cases. based matching is performed by employing Probabilistic Hough Matching (PHM) in HOG feature space. The final localization is the patches in the images that contain common pattern across images (action in action images). In order to further remove noisy patches, we repeat random walk framework (described above) on image patches and remove low consistency noisy patches. A few qualitative examples of unsupervised bounding box extraction for these images are shown in Fig. 3. Negative Samples for Actioness Detection. Given the video action proposals in each video, we find the ones that have very low optical flow derivatives and hence probably do not contain an action. We sample patches from those proposals and use them as negative data for training actionness detector. In practice, we found these patches are more useful compared to non-action images from Google. Image Actionness Detector. Given the positive and negative samples( see Fig. 2), we fine-tune Alexnet [37] to obtain actionness detector. We use around 6,000 positive and negative samples for training and 3000 positive and negative samples for validation. For training, the batch size is 256, the learning rate is 10 3 and number of iterations is 50K. The output of this classifier is the probability of each patch being representative of an action. Finally, the actionness score of sub-proposal is the mean of actionness score of each individual patch within sub-proposal. 11
12 Motion Score Actionness measure generic notion of actionnness within the bounding box of each sub-proposal but does not capture the explicit motion information. Due to large camera motion and background clutter, the straightforward use of optical flow magnitude within each proposal is noisy. Moreover, mostly, a large motion is generated by legs or hands and therefore, the proposals which capture these parts would get high motion scores. However, we want to assign high motion score to the proposals that enclose the complete moving body. Fortunately, motion edges produce high gradients across the whole moving body. We build upon the observation from [16], that higher the number of motion contours enclosed by proposal patch, the higher the probability the patch contains a complete moving body. Specifically, given the optical flow of two video frames (see Fig 4.), we compute motion edges for each channel of optical flow separately, The final motion edges are obtained as: E m =E u + E v, where E u and E v represent motion edges of u and v respectively. We, then, use an efficient framework of [16] to obtain several bounding boxes which represent the moving bodies in each frame. Figure 4 (c) shows motion edges for shown video frames and Figure 4(d) shows bounding boxes obtained using these motion edges. In Figure 4(e), we show that the bounding boxes obtained using motion edges enclose the action better than the bounding boxes obtained using image edges. To obtain motion score for any video proposal patch in a particular frame, we compute its overlap with all bounding boxes (obtained using motion edges) in that frame and assign it the score of the highest overlapped bounding box. Finally, the motion score of any sub-proposal is the mean of the motion score of its proposal patches Edge Score The combined actionness and motion scores give the probability that a sub-proposal contains some action; however, it ignores the consistency and similarity between subproposal across different proposals. These similarities and consistencies are encoded in the edge score, which is a combination of sub-proposal appearance and shape similarities. 12
 proposals computed based on image edges.")
 between last")
 Area(b i,l b j,1 ), (7) where b i,l represents bounding")



")
13 (a) (b) (c) (d) (e) Figure 4: (a) video frames, (b) optical flow, (c) motion edges, (d) proposals computed based on motion edges and (e) proposals computed based on image edges. The red bounding box shows the highest scored proposal. The shape similarity of two sub-proposal is measured by intersection-over-union (IOU) between last frame in one sub-proposal and the first frame of its temporally next sub-proposal. It is defined as: Ψ o = Area(b i,l b j,1 ) Area(b i,l b j,1 ), (7) where b i,l represents bounding box in the last frame of a sub-proposal i and b j,1 represents the bounding box in the first frame of its temporally next sub-proposal j. To capture appearance similarity Ψ a, we use Euclidean similarity between mean of HOGs of patches within each sub-proposal. 4. Experiments The main goal of our experiments is to evaluate the accuracy of proposal ranking for trimmed and untrimmed datasets and validate proposal ranking effectiveness for action detection. In all the experiments, we used λ i =λ m =λ o =λ a =1 (in Equation (1) and (2)) Proposal Ranking in Trimmed Videos We evaluated the proposed approach on two challenging datasets: UCF-Sports [32] and sub-jhmdb [38]. UCF-Sports contains 10 human actions. This dataset includes actions such as diving, horse riding, running, walking, swinging, etc. These videos contain large camera motion and dynamic backgrounds. 13



















![[7, 4] are based on](/docs-images/88/115058644/images/14-19.jpg "supervoxel segmentation")





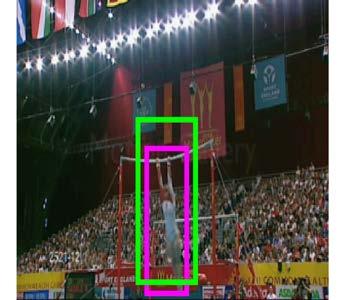

14 Horse Riding Lifting Kicking Golf Swing Swing SideAngle Swing Bench Walk Skateboarding Diving Running Figure 5: Qualitative results for UCF-Sports. Each row shows four frames of videos from two UCF-Sports actions. The magenta and green boxes respectively indicate ground truth and top ranked action proposal. Sub-JHMDB contains 316 video clips covering 12 human actions: climb, pullups, push, climb stairs, jump, catch, etc. This dataset is quite challenging due to clutter and variations in human motion and appearances. In order to calculate localization accuracy, we compute overlap of top ranked action proposal with ground truth annotations as defined in [4]. Since our approach is generic as it does not depend on any specific underlying action proposal method, we demonstrate localization results for three recent action proposals methods [7, 4, 5]. The method proposed in [7, 4] are based on supervoxel segmentation and hierarchical merging of those segments. While van Gemert et al. [5] used improved dense trajectories [10] clustering to obtain action proposals. We first compute optical flow derivatives for each proposal and remove highly overlapped proposals using non-maximal suppression. We compared our approach with two recently proposed weakly supervised proposal ranking methods [28, 27]. These methods achieve proposals ranking by exploiting proposals from negative videos, i.e., by using proposals from the videos that contain ac- 14











![The method in [28] improved](/docs-images/88/115058644/images/15-11.jpg "over [27] and employed all")











15 Swingball Run Pullups Kick Golf Walk Shootball Push Pick Jump Catch Climb Figure 6: Qualitative examples from Sub-JHMDB. Each block shows four frames from a different action video in Sub-JHMDB. The magenta and green boxes respectively indicate ground truth and top ranked action proposals. tions other than the action of interest. Specifically, [27] ranked the proposals according to their nearest neighbor in negative videos. Larger the distance of proposal to the nearest neighbor proposal in the negative videos, the higher is the rank of the proposal. The method in [28] improved over [27] and employed all negatives proposals and penalize proposals to be ranked using their distance to negative proposals. We implemented both methods as described in [28]. For proposals representation, we used CNN features [35] within proposal patch averaging over sample frames in the proposal, similar to [31]. In Table 2, we demonstrate localization accuracy of top most proposal over different thresholds. We compared our approach with both methods [28, 27] for all proposals methods we used. We do not use Jain et al. [4] proposals for Sub-JHMDB, due unavailability of their code for this dataset. Since [7, 4, 5] do not provide proposal ranking, we randomly sample proposal from each video and report their localization accuracy (averaged over three iterations). 15
16 Recall Recall Proposed Tang et al. Siva et al Number of Proposals (a) 0.1 Proposed Tang et al. Siva et al Number of Proposals (b) Figure 7: Recall versus number of proposals for UCF-Sports (a) and sub-jhmdb (b). The results are shown for Proposed method (red), Tang et. al. (green) and Siva et. al. (blue). It can be seen in Table 2 that for both datasets and for all proposal methods, our method significantly outperforms baselines without even using video level labels. As we increase the threshold, the localization accuracy decreases; however, our results are always better compared to the baselines. At overlap threshold of 20%, as used by several recent works for action detection [1, 6, 4], our method has more than 85% accuracy for both datasets. In Figure 7, we demonstrate recall versus different number of proposals. The results demonstrate that our approach significantly outperforms baselines at all different number of proposals. Fig. 5 and Fig. 6 show the qualitative results for top-ranked proposals for different videos of UCF-Sports and Sub-JHMDB. It can be seen that top ranked proposals cover the actor very well despite the presence of many noisy proposals due to clutter, large camera motion, and dynamic backgrounds. Table 1: Contribution from different components on UCF-sports with van Germert et al. proposals. Components t=0.1 t=0.2 t=0.3 t=0.4 t=0.5 t=0.6 MABO Motion Score + Shape + Appearance Actionness + Shape + Appearance Actionness + Motion Score + Appearance Actionness + Motion Score + Shape Motion Score + Actionness + Shape + Appearance
17 Table 1. shows the contribution of actioness score and motion score for final action localization. Top row shows that using Motion score and Shape + Appearance similarities (for graph construction), we achieve 40.4 (MABO). Second-row shows using Actionness and Shape + Appearance gives The last row demonstrates that motion and actionness have complementary information and combination of both results in total MABO of Finally, third and forth rows show localization accuracies using individual graph edge component. The results demonstrate that each component of our method is essential to achieve final localization accuracy. It is interesting to observe that through proposal recombination, in many videos, we are able to discover proposals that are better than the best existing proposal in the initial proposal method. Given top 20 proposals, for UCF Sports and Sub-JHMDB, in 64 and 83 videos respectively, our newly generated proposals are better than all underlying proposals [7] Proposal Ranking in Untrimmed Videos In addition to trimmed datasets, we tested our approach on untrimmed MSR-II dataset. This dataset has 54 untrimmed videos and contains three actions: Handwaving, Clapping, and Boxing. This dataset is very challenging due to background clutter and occlusions. Since these videos are untrimmed, we first employ an unsupervised shot-detection method [39] to divide the long video sequences to small shots and limit the action proposals within the shots. Below, we describe in details shot detection procedure. Temporal Segmentation: We calculate the mean location of the action proposals in each video frame, and then the action proposal speed is calculated by the location distance between adjacent frames. For action proposal diversity, we calculate the standard deviation of the locations of action proposals in every video frame. Finally, for the frame difference, we simply calculate the sum of the pixel differences between adjacent video frames. Given these three features, we employ a thoroughly studied and well developed multiple change point detection scheme technique in statistic [39] for detecting shots. 17
18 Table 2: Comparisons of Proposal Ranking using Different Action Proposal Datasets Proposal Methods t=0.1 t=0.2 t=0.3 t=0.4 t=0.5 t=0.6 MABO Ours Jain et al. Tang et.al Siva et.al Jain et.al UCF- Ours Sports Oneata et al. Tang et.al Siva et.al Oneata et al Ours van Gemert et al. Tang et.al Siva et.al van Gemert et al Ours Oneata et al. Tang et.al Sub- Siva et.al JHMDB Oneata et al Ours van Gemert et al. Tang et.al Siva et.al van Gemert et al Proposed (Unsupervised), Number of Proposals=1434 Yu et al. (Supervised), Number of Proposals = 2000 van Gemert et al. (Unsupervised), Number of Proposals= CorLoc Overlap Ratio Figure 8: CorLoc comparision for different thresholds on MSR-II. 18
19 Let Z R N K represents the matrix obtained by horizontal concatenation of features vectors of length K from N video frames. Note that in our case, since we have 3 features, K=3. We seek to identify piece-wise approximation of Z, i.e., X using following convex optimization formulation: min X N Z X n+1,. X n,. X 2 + λ, (8) w n=1 n where number of shots are automatically determined by convex total variation [39] and w n represents temporal location-dependent weights given as: N w n = n(n n). (9) Note that the first term in Equation. 1 represents quadratic error criterion and the second term enforce row-wise sparsity in X. We solve above equation efficiently using group LARS [40]. On average, we have 9 shots (unsupervisedly selected) in each video and we found top ranked proposals in each shot. We compared our method with recently proposed state-of-the-art supervised action proposals method [8] and report CorLoc results in Figure. 8. It can be seen that even with 30% less number of proposals, our unsupervised approach performs better than the supervised action proposal method. Furthermore, we show the results of [5] (blue curve) with the number of proposals equal to our method (randomly selected). The quantitative results shown in Figure 8 demonstrates that our method significantly outperform when considering less number of proposals. In the next section, we discuss the action detection using re-ranked proposals Action Detection Better-ranked action proposals not only improve computation efficiency by reducing the search space but also improve action recognition accuracy by reducing the false positive rate. We closely followed the procedure described in [5] for proposal classification. Specifically, we concatenate dense trajectory features (MBH, HOG, HOF, Traj) into 426-dimensional vector and reduce its dimension to half using PCA. We randomly sample features from training videos and fit 128 GMMs to it. We compute fisher 19
20 Proposed van Gemert et al AUC 0.3 map Van Gemert et. al. Jain et. al. Ours Overlap threshold Overlap threshold Figure 9: Left: The AUC curves for UCF-Sports dataset [32]. The results are shown for proposed method (red), Jain et al. [4] (blue) and Van Gemert et al. [5] (green). Right: map curves are shown for Proposed method (red), van Van Gemert et al. [5] (green) vector representation of each proposal followed by power and L 2 normalization. Finally, we used a linear classifier for training action detector. In our case, during testing, we only used top 25 proposals for features computation as well as classification. The final prediction scores of top 25 proposals are obtained by multiply proposal scores and classifier scores. In Fig. 9, we compared our results with two recent state-of-theart proposal based action detection methods. It can be seen that we outperform both methods with significant margin at all overlapping thresholds. In addition to UCF-Sports, we also demonstrate results for action detection results on UCF101. We use [5] for getting initial proposals. Experimental results in Figure 9 shows the superiority of our approach as compared to baseline [5]. Note that author in [5] have used 2299 proposals in each video. In contrast, our method just use only 200 proposals in each video. Performing better than the baselines emphasizes the strength of the proposed approach and reinforces that properly ranked action proposals have significant impact on action detection. 20
21 4.4. Computation Time: Our approach works on top of [7][4][5]. These proposals take few minutes for computing proposal in each video. We now have optimized our code slightly. Our code takes seconds to compute action score for each proposal patch and 0.02 seconds for optimal path discovery for both UCF-Sports and sub-jhmdb datasets. Other steps: optical flow derivatives, HOGs similarity also take less than a sec. 5. Conclusions We have proposed a method for action proposal ranking which aims to generate fewer but better action proposals which are ranked properly. We have tested our method on UCF-Sports, sub-jhmdb and MSR-II for action proposal ranking and compared it to several baseline methods. We have shown that the proposed method generates fewer but better proposals. The method is useful for many applications and can reduce the search space dramatically. We also performed experiments for action detection and showed better performance compared with state-of-the-art proposals based action detection methods. References References [1] Y. Tian, R. Sukthankar, M. Shah, Spatiotemporal deformable part models for action detection, in: CVPR, [2] T. Lan, Y. Wang, G. Mori, Discriminative figure-centric models for joint action localization and recognition, in: ICCV, [3] G. Gkioxari, J. Malik, Finding action tubes, in: Computer Vision and Pattern Recognition (CVPR), 2015 IEEE Conference on, [4] M. Jain, J. van Gemert, H. Jegou, P. Bouthemy, C. Snoek, Action localization with tubelets from motion, in: Computer Vision and Pattern Recognition (CVPR), 2014 IEEE Conference on, 2014, pp
22 [5] J. van Gemert, M. Jain, G. Ella, C. Snoek, Apt: Action localization proposals from dense trajectories, in: BMVC, 2015, pp [6] K. Soomor, H. Idrees, M. Shah, Action localization in videos through context walk, in: ICCV, [7] D. Oneata, J. Revaud, J. Verbeek, C. Schmid, Spatio-Temporal Object Detection Proposals, in: ECCV, [8] G. Yu, J. Yuan, Fast action proposals for human action detection and search, in: Computer Vision and Pattern Recognition (CVPR), 2015 IEEE Conference on, [9] C. Xu, S. Whitt, J. J. Corso, Flattening supervoxel hierarchies by the uniform entropy slice, in: 2013 IEEE International Conference on Computer Vision, [10] H. Wang, C. Schmid, Action recognition with improved trajectories, in: ICCV, [11] Y.-G. Jiang, J. Liu, A. Roshan Zamir, G. Toderici, I. Laptev, M. Shah, R. Sukthankar, THUMOS challenge: Action recognition with a large number of classes, [12] P. F. Felzenszwalb, R. B. Girshick, D. McAllester, D. Ramanan, Object detection with discriminatively trained part based models, IEEE Transactions on Pattern Analysis and Machine Intelligence 32 (9) (2010) [13] J. R. R. Uijlings, K. E. A. van de Sande, T. Gevers, A. W. M. Smeulders, Selective search for object recognition, in: IJCV, [14] C. H. Lampert, M. B. Blaschko, T. Hofmann, Efficient subwindow search: A branch and bound framework for object localization, IEEE Trans. Pattern Anal. Mach. Intell. [15] B. Alexe, T. Deselaers, V. Ferrari, What is an object?, in: CVPR,
23 [16] C. L. Zitnick, P. Dollár, Edge boxes: Locating object proposals from edges, in: ECCV, [17] S. Manén, M. Guillaumin, L. Van Gool, Prime Object Proposals with Randomized Prim s Algorithm, in: ICCV, [18] R. Girshick, J. Donahue, T. Darrell, J. Malik, Rich feature hierarchies for accurate object detection and semantic segmentation, in: Computer Vision and Pattern Recognition, [19] W. Kuo, B. Hariharan, J. Malik, Deepbox: Learning objectness with convolutional networks, in: The IEEE International Conference on Computer Vision (ICCV), [20] Z. Zhong, M. Lei, S. Li, J. Fan, Re-ranking object proposals for object detection in automatic driving, CoRR. URL [21] J. Yuan, Z. Liu, Y. Wu, Discriminative video pattern search for efficient action detection, IEEE Transactions on Pattern Analysis and Machine Intelligence. [22] C. Xu, C. Xiong, J. J. Corso, Streaming hierarchical video segmentation, in: ECCV, [23] R. Sibson, Slink: an optimally efficient algorithm for the single-link cluster method, in: The Computer Journal, [24] P. Weinzaepfel, Z. Harchaoui, C. Schmid, Learning to track for spatio-temporal action localization, in: The IEEE International Conference on Computer Vision (ICCV), [25] W. Chen, C. Xiong, R. Xu, J. J. Corso, Actionness ranking with lattice conditional ordinal random fields, in: 2014 IEEE Conference on Computer Vision and Pattern Recognition,
24 [26] L. Wang, Y. Qiao, X. Tang, L. Van Gool, Actionness estimation using hybrid fully convolutional networks, in: The IEEE Conference on Computer Vision and Pattern Recognition (CVPR), [27] P. Siva, C. Russell, T. Xiang, In defence of negative mining for annotating weakly labelled data, in: ECCV, [28] K. Tang, R. Sukthankar, J. Yagnik, L. Fei-Fei, Discriminative segment annotation in weakly labeled video, in: CVPR, [29] W. Sultani, M. Shah, What if we do not have multiple videos of the same action? video action localization using web images, in: The IEEE Conference on Computer Vision and Pattern Recognition (CVPR), [30] Y. Yang, D. Ramanan, Articulated pose estimation with flexible mixtures-ofparts, in: Computer Vision and Pattern Recognition (CVPR), 2011 IEEE Conference on, IEEE, 2011, pp [31] M. Jain, J. C. van Gemert, C. G. M. Snoek, What do 15,000 object categories tell us about classifying and localizing actions?, in: Computer Vision and Pattern Recognition (CVPR), 2015 IEEE Conference on, [32] M. Rodriguez, J. Ahmed, M. Shah, Action MACH: A spatio-temporal maximum average correlation height filter for action recognition, in: CVPR, [33] X. Chen, A. Shrivastava, A. Gupta, Neil: Extracting visual knowledge from web data, in: Computer Vision (ICCV), 2013 IEEE International Conference on, [34] H. Moonesinghe, P.-N. Tan, Outlier detection using random walks, in: Tools with Artificial Intelligence, ICTAI th IEEE International Conference on, [35] A. Vedaldi, K. Lenc, Matconvnet convolutional neural networks for matlab,
25 [36] M. Cho, S. Kwak, C. Schmid, J. Ponce, Unsupervised object discovery and localization in the wild: Part-based matching with bottom-up region proposals, in: CVPR, [37] A. Krizhevsky, I. Sutskever, G. E. Hinton, Imagenet classification with deep convolutional neural networks, in: Advances in Neural Information Processing Systems 25, [38] Y. Q. L. Wang, X. Tang, Video action detection with relational dynamic-poselets, [39] K. Bleakley, J.-P. Vert., The group fused lasso for multiple change-point detection., in: arxiv preprint arxiv: , [40] Ming Yuan and Yi Lin., Model selection and estimation in regression with grouped variables., in: JOURNAL OF THE ROYAL STATISTICAL SOCIETY, SERIES B,
APT: Action localization Proposals from dense Trajectories
 VAN GEMERT, JAIN, GATI, SNOEK: ACTION LOCALIZATION PROPOSALS FROM DENSE TRAJECTORIES 1 APT: Action localization Proposals from dense Trajectories Jan C. van Gemert 1,2 j.c.vangemert@gmail.com Mihir Jain
VAN GEMERT, JAIN, GATI, SNOEK: ACTION LOCALIZATION PROPOSALS FROM DENSE TRAJECTORIES 1 APT: Action localization Proposals from dense Trajectories Jan C. van Gemert 1,2 j.c.vangemert@gmail.com Mihir Jain
Automatic Action Annotation in Weakly Labeled Videos
 Automatic Action Annotation in Weakly Labeled Videos Waqas Sultani, Mubarak Shah Center for Research in Computer Vision, University of Central Florida, USA waqassultani@knights.ucf.edu, shah@crcv.ucf.edu
Automatic Action Annotation in Weakly Labeled Videos Waqas Sultani, Mubarak Shah Center for Research in Computer Vision, University of Central Florida, USA waqassultani@knights.ucf.edu, shah@crcv.ucf.edu
Segmenting Objects in Weakly Labeled Videos
 Segmenting Objects in Weakly Labeled Videos Mrigank Rochan, Shafin Rahman, Neil D.B. Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, Canada {mrochan, shafin12, bruce, ywang}@cs.umanitoba.ca
Segmenting Objects in Weakly Labeled Videos Mrigank Rochan, Shafin Rahman, Neil D.B. Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, Canada {mrochan, shafin12, bruce, ywang}@cs.umanitoba.ca
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
arxiv: v3 [cs.cv] 2 Aug 2017
![arxiv: v3 [cs.cv] 2 Aug 2017](/thumbs/72/66392286.jpg "arxiv: v3 [cs.cv] 2 Aug 2017") Action Detection ( 4.3) Tube Proposal Network ( 4.1) Tube Convolutional Neural Network (T-CNN) for Action Detection in Videos Rui Hou, Chen Chen, Mubarak Shah Center for Research in Computer Vision (CRCV),
Action Detection ( 4.3) Tube Proposal Network ( 4.1) Tube Convolutional Neural Network (T-CNN) for Action Detection in Videos Rui Hou, Chen Chen, Mubarak Shah Center for Research in Computer Vision (CRCV),
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
BING3D: Fast Spatio-Temporal Proposals for Action Localization
 : Fast Spatio-Temporal Proposals for Action Localization Ella Gati University of Amsterdam John G. M. Schavemaker TNO Jan C. van Gemert Delft University of Technology Abstract The goal of this work is
: Fast Spatio-Temporal Proposals for Action Localization Ella Gati University of Amsterdam John G. M. Schavemaker TNO Jan C. van Gemert Delft University of Technology Abstract The goal of this work is
REJECTION-BASED CLASSIFICATION FOR ACTION RECOGNITION USING A SPATIO-TEMPORAL DICTIONARY. Stefen Chan Wai Tim, Michele Rombaut, Denis Pellerin
 REJECTION-BASED CLASSIFICATION FOR ACTION RECOGNITION USING A SPATIO-TEMPORAL DICTIONARY Stefen Chan Wai Tim, Michele Rombaut, Denis Pellerin Univ. Grenoble Alpes, GIPSA-Lab, F-38000 Grenoble, France ABSTRACT
REJECTION-BASED CLASSIFICATION FOR ACTION RECOGNITION USING A SPATIO-TEMPORAL DICTIONARY Stefen Chan Wai Tim, Michele Rombaut, Denis Pellerin Univ. Grenoble Alpes, GIPSA-Lab, F-38000 Grenoble, France ABSTRACT
Tube Convolutional Neural Network (T-CNN) for Action Detection in Videos
 for Action Detection in Videos") Tube Convolutional Neural Network (T-CNN) for Action Detection in Videos Rui Hou, Chen Chen, Mubarak Shah Center for Research in Computer Vision (CRCV), University of Central Florida (UCF) houray@gmail.com,
Tube Convolutional Neural Network (T-CNN) for Action Detection in Videos Rui Hou, Chen Chen, Mubarak Shah Center for Research in Computer Vision (CRCV), University of Central Florida (UCF) houray@gmail.com,
Action Localization in Video using a Graph-based Feature Representation
 Action Localization in Video using a Graph-based Feature Representation Iveel Jargalsaikhan, Suzanne Little and Noel E O Connor Insight Centre for Data Analytics, Dublin City University, Ireland iveel.jargalsaikhan2@mail.dcu.ie
Action Localization in Video using a Graph-based Feature Representation Iveel Jargalsaikhan, Suzanne Little and Noel E O Connor Insight Centre for Data Analytics, Dublin City University, Ireland iveel.jargalsaikhan2@mail.dcu.ie
Action recognition in videos
 Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK
 TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
arxiv: v1 [cs.cv] 25 Apr 2016
![arxiv: v1 [cs.cv] 25 Apr 2016](/thumbs/90/103699370.jpg "arxiv: v1 [cs.cv] 25 Apr 2016") Actionness Estimation Using Hybrid Fully Convolutional Networks Limin Wang,3 Yu Qiao Xiaoou Tang,2 Luc Van Gool 3 Shenzhen key lab of Comp. Vis. & Pat. Rec., Shenzhen Institutes of Advanced Technology,
Actionness Estimation Using Hybrid Fully Convolutional Networks Limin Wang,3 Yu Qiao Xiaoou Tang,2 Luc Van Gool 3 Shenzhen key lab of Comp. Vis. & Pat. Rec., Shenzhen Institutes of Advanced Technology,
THE goal of action detection is to detect every occurrence
 JOURNAL OF L A T E X CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 An End-to-end 3D Convolutional Neural Network for Action Detection and Segmentation in Videos Rui Hou, Student Member, IEEE, Chen Chen, Member,
JOURNAL OF L A T E X CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 An End-to-end 3D Convolutional Neural Network for Action Detection and Segmentation in Videos Rui Hou, Student Member, IEEE, Chen Chen, Member,
Lecture 18: Human Motion Recognition
 Lecture 18: Human Motion Recognition Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction Motion classification using template matching Motion classification i using spatio
Lecture 18: Human Motion Recognition Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction Motion classification using template matching Motion classification i using spatio
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Predicting the Where and What of actors and actions through Online Action Localization
 216 IEEE Conference on Computer Vision and Pattern Recognition Predicting the Where and What of actors and actions through Online Action Localization Khurram Soomro, Haroon Idrees, Mubarak Shah Center
216 IEEE Conference on Computer Vision and Pattern Recognition Predicting the Where and What of actors and actions through Online Action Localization Khurram Soomro, Haroon Idrees, Mubarak Shah Center
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
MSR-CNN: Applying Motion Salient Region Based Descriptors for Action Recognition
 MSR-CNN: Applying Motion Salient Region Based Descriptors for Action Recognition Zhigang Tu School of Computing, Informatics, Decision System Engineering Arizona State University Tempe, USA Email: Zhigang.Tu@asu.edu
MSR-CNN: Applying Motion Salient Region Based Descriptors for Action Recognition Zhigang Tu School of Computing, Informatics, Decision System Engineering Arizona State University Tempe, USA Email: Zhigang.Tu@asu.edu
arxiv: v1 [cs.cv] 2 Sep 2018
![arxiv: v1 [cs.cv] 2 Sep 2018](/thumbs/85/92128474.jpg "arxiv: v1 [cs.cv] 2 Sep 2018") Natural Language Person Search Using Deep Reinforcement Learning Ankit Shah Language Technologies Institute Carnegie Mellon University aps1@andrew.cmu.edu Tyler Vuong Electrical and Computer Engineering
Natural Language Person Search Using Deep Reinforcement Learning Ankit Shah Language Technologies Institute Carnegie Mellon University aps1@andrew.cmu.edu Tyler Vuong Electrical and Computer Engineering
Lecture 5: Object Detection
 Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object detection with CNNs
 Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Unsupervised Co-Activity Detection from Multiple Videos Using Absorbing Markov Chain
 Proceedings of the Thirtieth AAAI Conference on Artificial Intelligence (AAAI-16) Unsupervised Co-Activity Detection from Multiple Videos Using Absorbing Markov Chain Donghun Yeo, Bohyung Han, Joon Hee
Proceedings of the Thirtieth AAAI Conference on Artificial Intelligence (AAAI-16) Unsupervised Co-Activity Detection from Multiple Videos Using Absorbing Markov Chain Donghun Yeo, Bohyung Han, Joon Hee
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
Action Localization in Videos through Context Walk
 215 IEEE International Conference on Computer Vision Action Localization in Videos through Context Walk Khurram Soomro, Haroon Idrees, Mubarak Shah Center for Research in Computer Vision (CRCV), University
215 IEEE International Conference on Computer Vision Action Localization in Videos through Context Walk Khurram Soomro, Haroon Idrees, Mubarak Shah Center for Research in Computer Vision (CRCV), University
CAP 6412 Advanced Computer Vision
 CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Activity Recognition in Temporally Untrimmed Videos
 Activity Recognition in Temporally Untrimmed Videos Bryan Anenberg Stanford University anenberg@stanford.edu Norman Yu Stanford University normanyu@stanford.edu Abstract We investigate strategies to apply
Activity Recognition in Temporally Untrimmed Videos Bryan Anenberg Stanford University anenberg@stanford.edu Norman Yu Stanford University normanyu@stanford.edu Abstract We investigate strategies to apply
Fast Action Proposals for Human Action Detection and Search
 Fast Action Proposals for Human Action Detection and Search Gang Yu Nanyang Technological University School of EEE, Singapore iskicy@gmail.com Junsong Yuan Nanyang Technological University School of EEE,
Fast Action Proposals for Human Action Detection and Search Gang Yu Nanyang Technological University School of EEE, Singapore iskicy@gmail.com Junsong Yuan Nanyang Technological University School of EEE,
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
Learning to track for spatio-temporal action localization
 Learning to track for spatio-temporal action localization Philippe Weinzaepfel a Zaid Harchaoui a,b Cordelia Schmid a a Inria b NYU firstname.lastname@inria.fr Abstract We propose an effective approach
Learning to track for spatio-temporal action localization Philippe Weinzaepfel a Zaid Harchaoui a,b Cordelia Schmid a a Inria b NYU firstname.lastname@inria.fr Abstract We propose an effective approach
Object Detection with YOLO on Artwork Dataset
 Object Detection with YOLO on Artwork Dataset Yihui He Computer Science Department, Xi an Jiaotong University heyihui@stu.xjtu.edu.cn Abstract Person: 0.64 Horse: 0.28 I design a small object detection
Object Detection with YOLO on Artwork Dataset Yihui He Computer Science Department, Xi an Jiaotong University heyihui@stu.xjtu.edu.cn Abstract Person: 0.64 Horse: 0.28 I design a small object detection
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
Proceedings of the International MultiConference of Engineers and Computer Scientists 2018 Vol I IMECS 2018, March 14-16, 2018, Hong Kong
 , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
, March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network
 Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Class 9 Action Recognition
 Class 9 Action Recognition Liangliang Cao, April 4, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Class 9 Action Recognition Liangliang Cao, April 4, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Spot On: Action Localization from Pointly-Supervised Proposals
 Spot On: Action Localization from Pointly-Supervised Proposals Pascal Mettes, Jan C. van Gemert, and Cees G. M. Snoek University of Amsterdam Delft University of Technology Abstract. We strive for spatio-temporal
Spot On: Action Localization from Pointly-Supervised Proposals Pascal Mettes, Jan C. van Gemert, and Cees G. M. Snoek University of Amsterdam Delft University of Technology Abstract. We strive for spatio-temporal
Edge Boxes: Locating Object Proposals from Edges
 Edge Boxes: Locating Object Proposals from Edges C. Lawrence Zitnick and Piotr Dollár Microsoft Research Abstract. The use of object proposals is an effective recent approach for increasing the computational
Edge Boxes: Locating Object Proposals from Edges C. Lawrence Zitnick and Piotr Dollár Microsoft Research Abstract. The use of object proposals is an effective recent approach for increasing the computational
Texture Complexity based Redundant Regions Ranking for Object Proposal
 26 IEEE Conference on Computer Vision and Pattern Recognition Workshops Texture Complexity based Redundant Regions Ranking for Object Proposal Wei Ke,2, Tianliang Zhang., Jie Chen 2, Fang Wan, Qixiang
26 IEEE Conference on Computer Vision and Pattern Recognition Workshops Texture Complexity based Redundant Regions Ranking for Object Proposal Wei Ke,2, Tianliang Zhang., Jie Chen 2, Fang Wan, Qixiang
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection
 Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Multi-region two-stream R-CNN for action detection
 Multi-region two-stream R-CNN for action detection Xiaojiang Peng, Cordelia Schmid To cite this version: Xiaojiang Peng, Cordelia Schmid. Multi-region two-stream R-CNN for action detection. ECCV 2016 -
Multi-region two-stream R-CNN for action detection Xiaojiang Peng, Cordelia Schmid To cite this version: Xiaojiang Peng, Cordelia Schmid. Multi-region two-stream R-CNN for action detection. ECCV 2016 -
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors
![[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors](/thumbs/89/97941029.jpg "[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors") [Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
Large-scale Video Classification with Convolutional Neural Networks
 Large-scale Video Classification with Convolutional Neural Networks Andrej Karpathy, George Toderici, Sanketh Shetty, Thomas Leung, Rahul Sukthankar, Li Fei-Fei Note: Slide content mostly from : Bay Area
Large-scale Video Classification with Convolutional Neural Networks Andrej Karpathy, George Toderici, Sanketh Shetty, Thomas Leung, Rahul Sukthankar, Li Fei-Fei Note: Slide content mostly from : Bay Area
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Extracting Spatio-temporal Local Features Considering Consecutiveness of Motions
 Extracting Spatio-temporal Local Features Considering Consecutiveness of Motions Akitsugu Noguchi and Keiji Yanai Department of Computer Science, The University of Electro-Communications, 1-5-1 Chofugaoka,
Extracting Spatio-temporal Local Features Considering Consecutiveness of Motions Akitsugu Noguchi and Keiji Yanai Department of Computer Science, The University of Electro-Communications, 1-5-1 Chofugaoka,
Person Action Recognition/Detection
 Person Action Recognition/Detection Fabrício Ceschin Visão Computacional Prof. David Menotti Departamento de Informática - Universidade Federal do Paraná 1 In object recognition: is there a chair in the
Person Action Recognition/Detection Fabrício Ceschin Visão Computacional Prof. David Menotti Departamento de Informática - Universidade Federal do Paraná 1 In object recognition: is there a chair in the
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
arxiv: v1 [cs.cv] 26 Jul 2018
![arxiv: v1 [cs.cv] 26 Jul 2018](/thumbs/88/117269915.jpg "arxiv: v1 [cs.cv] 26 Jul 2018") A Better Baseline for AVA Rohit Girdhar João Carreira Carl Doersch Andrew Zisserman DeepMind Carnegie Mellon University University of Oxford arxiv:1807.10066v1 [cs.cv] 26 Jul 2018 Abstract We introduce
A Better Baseline for AVA Rohit Girdhar João Carreira Carl Doersch Andrew Zisserman DeepMind Carnegie Mellon University University of Oxford arxiv:1807.10066v1 [cs.cv] 26 Jul 2018 Abstract We introduce
Human Action Segmentation with Hierarchical Supervoxel Consistency
 Human Action Segmentation with Hierarchical Supervoxel Consistency Jiasen Lu 1, Ran Xu 1 and Jason J. Corso 2 1 Computer Science and Engineering, SUNY at Buffalo 2 Electrical Engineering and Computer Science,
Human Action Segmentation with Hierarchical Supervoxel Consistency Jiasen Lu 1, Ran Xu 1 and Jason J. Corso 2 1 Computer Science and Engineering, SUNY at Buffalo 2 Electrical Engineering and Computer Science,
P-CNN: Pose-based CNN Features for Action Recognition. Iman Rezazadeh
 P-CNN: Pose-based CNN Features for Action Recognition Iman Rezazadeh Introduction automatic understanding of dynamic scenes strong variations of people and scenes in motion and appearance Fine-grained
P-CNN: Pose-based CNN Features for Action Recognition Iman Rezazadeh Introduction automatic understanding of dynamic scenes strong variations of people and scenes in motion and appearance Fine-grained
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling
 [DOI: 10.2197/ipsjtcva.7.99] Express Paper Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling Takayoshi Yamashita 1,a) Takaya Nakamura 1 Hiroshi Fukui 1,b) Yuji
[DOI: 10.2197/ipsjtcva.7.99] Express Paper Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling Takayoshi Yamashita 1,a) Takaya Nakamura 1 Hiroshi Fukui 1,b) Yuji
An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b
 5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
Finding Tiny Faces Supplementary Materials
 Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Video Object Proposals
 Video Object Proposals Gilad Sharir Tinne Tuytelaars KU Leuven ESAT/PSI - IBBT Abstract In this paper, we extend a recently proposed method for generic object detection in images, category-independent
Video Object Proposals Gilad Sharir Tinne Tuytelaars KU Leuven ESAT/PSI - IBBT Abstract In this paper, we extend a recently proposed method for generic object detection in images, category-independent
Minimizing hallucination in Histogram of Oriented Gradients
 Minimizing hallucination in Histogram of Oriented Gradients Javier Ortiz Sławomir Bąk Michał Koperski François Brémond INRIA Sophia Antipolis, STARS group 2004, route des Lucioles, BP93 06902 Sophia Antipolis
Minimizing hallucination in Histogram of Oriented Gradients Javier Ortiz Sławomir Bąk Michał Koperski François Brémond INRIA Sophia Antipolis, STARS group 2004, route des Lucioles, BP93 06902 Sophia Antipolis
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
PEDESTRIAN DETECTION IN CROWDED SCENES VIA SCALE AND OCCLUSION ANALYSIS
 PEDESTRIAN DETECTION IN CROWDED SCENES VIA SCALE AND OCCLUSION ANALYSIS Lu Wang Lisheng Xu Ming-Hsuan Yang Northeastern University, China University of California at Merced, USA ABSTRACT Despite significant
PEDESTRIAN DETECTION IN CROWDED SCENES VIA SCALE AND OCCLUSION ANALYSIS Lu Wang Lisheng Xu Ming-Hsuan Yang Northeastern University, China University of California at Merced, USA ABSTRACT Despite significant
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Det De e t cting abnormal event n s Jaechul Kim
 Detecting abnormal events Jaechul Kim Purpose Introduce general methodologies used in abnormality detection Deal with technical details of selected papers Abnormal events Easy to verify, but hard to describe
Detecting abnormal events Jaechul Kim Purpose Introduce general methodologies used in abnormality detection Deal with technical details of selected papers Abnormal events Easy to verify, but hard to describe
Spatial-Aware Object Embeddings for Zero-Shot Localization and Classification of Actions
 Spatial-Aware Object Embeddings for Zero-Shot Localization and Classification of Actions Pascal Mettes and Cees G. M. Snoek University of Amsterdam Abstract We aim for zero-shot localization and classification
Spatial-Aware Object Embeddings for Zero-Shot Localization and Classification of Actions Pascal Mettes and Cees G. M. Snoek University of Amsterdam Abstract We aim for zero-shot localization and classification
Online Object Tracking with Proposal Selection. Yang Hua Karteek Alahari Cordelia Schmid Inria Grenoble Rhône-Alpes, France
 Online Object Tracking with Proposal Selection Yang Hua Karteek Alahari Cordelia Schmid Inria Grenoble Rhône-Alpes, France Outline 2 Background Our approach Experimental results Summary Background 3 Tracking-by-detection
Online Object Tracking with Proposal Selection Yang Hua Karteek Alahari Cordelia Schmid Inria Grenoble Rhône-Alpes, France Outline 2 Background Our approach Experimental results Summary Background 3 Tracking-by-detection
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task
 Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Multiple-Person Tracking by Detection
 http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
Robust PDF Table Locator
 Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
arxiv: v2 [cs.cv] 25 Aug 2014
![arxiv: v2 [cs.cv] 25 Aug 2014](/thumbs/88/116094031.jpg "arxiv: v2 [cs.cv] 25 Aug 2014") ARTOS Adaptive Real-Time Object Detection System Björn Barz Erik Rodner bjoern.barz@uni-jena.de erik.rodner@uni-jena.de arxiv:1407.2721v2 [cs.cv] 25 Aug 2014 Joachim Denzler Computer Vision Group Friedrich
ARTOS Adaptive Real-Time Object Detection System Björn Barz Erik Rodner bjoern.barz@uni-jena.de erik.rodner@uni-jena.de arxiv:1407.2721v2 [cs.cv] 25 Aug 2014 Joachim Denzler Computer Vision Group Friedrich
Common Action Discovery and Localization in Unconstrained Videos
 Common Action Discovery and Localization in Unconstrained Videos Jiong Yang 1 Junsong Yuan 2 1 Interdisciplinary Graduate School 2 School of Electrical and Electronic Engineering Nanyang Technological
Common Action Discovery and Localization in Unconstrained Videos Jiong Yang 1 Junsong Yuan 2 1 Interdisciplinary Graduate School 2 School of Electrical and Electronic Engineering Nanyang Technological
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
Storyline Reconstruction for Unordered Images
 Introduction: Storyline Reconstruction for Unordered Images Final Paper Sameedha Bairagi, Arpit Khandelwal, Venkatesh Raizaday Storyline reconstruction is a relatively new topic and has not been researched
Introduction: Storyline Reconstruction for Unordered Images Final Paper Sameedha Bairagi, Arpit Khandelwal, Venkatesh Raizaday Storyline reconstruction is a relatively new topic and has not been researched
Object Detection with Discriminatively Trained Part Based Models
 Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Supplementary Material for Ensemble Diffusion for Retrieval
 Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Flow-free Video Object Segmentation
 1 Flow-free Video Object Segmentation Aditya Vora and Shanmuganathan Raman Electrical Engineering, Indian Institute of Technology Gandhinagar, Gujarat, India, 382355 Email: aditya.vora@iitgn.ac.in, shanmuga@iitgn.ac.in
1 Flow-free Video Object Segmentation Aditya Vora and Shanmuganathan Raman Electrical Engineering, Indian Institute of Technology Gandhinagar, Gujarat, India, 382355 Email: aditya.vora@iitgn.ac.in, shanmuga@iitgn.ac.in
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
arxiv: v1 [cs.cv] 30 May 2017
![arxiv: v1 [cs.cv] 30 May 2017](/thumbs/91/106774319.jpg "arxiv: v1 [cs.cv] 30 May 2017") Trampoline ing Trampoline ing Generic Tubelet Proposals for Action Localization arxiv:1705.10861v1 [cs.cv] 30 May 2017 Jiawei He Simon Fraser University jha203@sfu.ca Abstract We develop a novel framework
Trampoline ing Trampoline ing Generic Tubelet Proposals for Action Localization arxiv:1705.10861v1 [cs.cv] 30 May 2017 Jiawei He Simon Fraser University jha203@sfu.ca Abstract We develop a novel framework
Supplementary Material: Unconstrained Salient Object Detection via Proposal Subset Optimization
 Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
Detecting Parts for Action Localization
 CHESNEAU ET AL.: DETECTING PARTS FOR ACTION LOCALIZATION 1 Detecting Parts for Action Localization Nicolas Chesneau nicolas.chesneau@inria.fr Grégory Rogez gregory.rogez@inria.fr Karteek Alahari karteek.alahari@inria.fr
CHESNEAU ET AL.: DETECTING PARTS FOR ACTION LOCALIZATION 1 Detecting Parts for Action Localization Nicolas Chesneau nicolas.chesneau@inria.fr Grégory Rogez gregory.rogez@inria.fr Karteek Alahari karteek.alahari@inria.fr
Learning Spatio-Temporal Features with 3D Residual Networks for Action Recognition
 Learning Spatio-Temporal Features with 3D Residual Networks for Action Recognition Kensho Hara, Hirokatsu Kataoka, Yutaka Satoh National Institute of Advanced Industrial Science and Technology (AIST) Tsukuba,
Learning Spatio-Temporal Features with 3D Residual Networks for Action Recognition Kensho Hara, Hirokatsu Kataoka, Yutaka Satoh National Institute of Advanced Industrial Science and Technology (AIST) Tsukuba,
Combining PGMs and Discriminative Models for Upper Body Pose Detection
 Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
arxiv: v1 [cs.cv] 16 Nov 2015
![arxiv: v1 [cs.cv] 16 Nov 2015](/thumbs/85/92600288.jpg "arxiv: v1 [cs.cv] 16 Nov 2015") Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
Deep Learning For Video Classification. Presented by Natalie Carlebach & Gil Sharon
 Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in
Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Project 3 Q&A. Jonathan Krause
 Project 3 Q&A Jonathan Krause 1 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations 2 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations
Project 3 Q&A Jonathan Krause 1 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations 2 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations
Detecting and Parsing of Visual Objects: Humans and Animals. Alan Yuille (UCLA)
") Detecting and Parsing of Visual Objects: Humans and Animals Alan Yuille (UCLA) Summary This talk describes recent work on detection and parsing visual objects. The methods represent objects in terms of
Detecting and Parsing of Visual Objects: Humans and Animals Alan Yuille (UCLA) Summary This talk describes recent work on detection and parsing visual objects. The methods represent objects in terms of
An efficient face recognition algorithm based on multi-kernel regularization learning
 Acta Technica 61, No. 4A/2016, 75 84 c 2017 Institute of Thermomechanics CAS, v.v.i. An efficient face recognition algorithm based on multi-kernel regularization learning Bi Rongrong 1 Abstract. A novel
Acta Technica 61, No. 4A/2016, 75 84 c 2017 Institute of Thermomechanics CAS, v.v.i. An efficient face recognition algorithm based on multi-kernel regularization learning Bi Rongrong 1 Abstract. A novel
SSD: Single Shot MultiBox Detector. Author: Wei Liu et al. Presenter: Siyu Jiang
 SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
G-CNN: an Iterative Grid Based Object Detector
 G-CNN: an Iterative Grid Based Object Detector Mahyar Najibi 1, Mohammad Rastegari 1,2, Larry S. Davis 1 1 University of Maryland, College Park 2 Allen Institute for Artificial Intelligence najibi@cs.umd.edu
G-CNN: an Iterative Grid Based Object Detector Mahyar Najibi 1, Mohammad Rastegari 1,2, Larry S. Davis 1 1 University of Maryland, College Park 2 Allen Institute for Artificial Intelligence najibi@cs.umd.edu
arxiv: v1 [cs.cv] 10 Jul 2014
![arxiv: v1 [cs.cv] 10 Jul 2014](/thumbs/88/116093932.jpg "arxiv: v1 [cs.cv] 10 Jul 2014") ARTOS Adaptive Real-Time Object Detection System Björn Barz Erik Rodner bjoern.barz@uni-jena.de erik.rodner@uni-jena.de arxiv:1407.2721v1 [cs.cv] 10 Jul 2014 Joachim Denzler Computer Vision Group Friedrich
ARTOS Adaptive Real-Time Object Detection System Björn Barz Erik Rodner bjoern.barz@uni-jena.de erik.rodner@uni-jena.de arxiv:1407.2721v1 [cs.cv] 10 Jul 2014 Joachim Denzler Computer Vision Group Friedrich
DeepProposals: Hunting Objects and Actions by Cascading Deep Convolutional Layers
 DOI.7/s263-7-6-x DeepProposals: Hunting Objects and Actions by Cascading Deep Convolutional Layers Amir Ghodrati Ali Diba 2 Marco Pedersoli 3 Tinne Tuytelaars 2 Luc Van Gool 2 Received: 3 May 26 / Accepted:
DOI.7/s263-7-6-x DeepProposals: Hunting Objects and Actions by Cascading Deep Convolutional Layers Amir Ghodrati Ali Diba 2 Marco Pedersoli 3 Tinne Tuytelaars 2 Luc Van Gool 2 Received: 3 May 26 / Accepted:
Fast Edge Detection Using Structured Forests
 Fast Edge Detection Using Structured Forests Piotr Dollár, C. Lawrence Zitnick [1] Zhihao Li (zhihaol@andrew.cmu.edu) Computer Science Department Carnegie Mellon University Table of contents 1. Introduction
Fast Edge Detection Using Structured Forests Piotr Dollár, C. Lawrence Zitnick [1] Zhihao Li (zhihaol@andrew.cmu.edu) Computer Science Department Carnegie Mellon University Table of contents 1. Introduction
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach
 Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Aggregating Descriptors with Local Gaussian Metrics
 Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
on learned visual embedding patrick pérez Allegro Workshop Inria Rhônes-Alpes 22 July 2015
 on learned visual embedding patrick pérez Allegro Workshop Inria Rhônes-Alpes 22 July 2015 Vector visual representation Fixed-size image representation High-dim (100 100,000) Generic, unsupervised: BoW,
on learned visual embedding patrick pérez Allegro Workshop Inria Rhônes-Alpes 22 July 2015 Vector visual representation Fixed-size image representation High-dim (100 100,000) Generic, unsupervised: BoW,