Data Fusion Virtual Surgery Medical Virtual Reality Team. Endo-Robot. Database Functional. Database
|
|
|
- Sabina Quinn
- 5 years ago
- Views:
Transcription







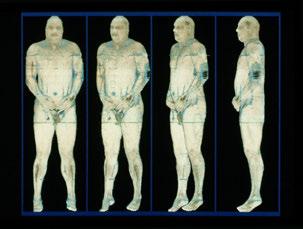
1 GITI 3D From 3D to 4D imaging Data Fusion Virtual Surgery Medical Virtual Reality Team Morphological Database Functional Database Endo-Robot High Dimensional Database Team Tele-surgery Robotic Surgery Team 4D Viewer 4DCT Development 4D Imaging Team Institute for High Dimensional Medical Imaging GITI 3D D - -









2 Tokyo, Japan Bonn, Germany Joseph M. Rosen, Hooman Soltanian, Richard J. Redett and Donald R. Laub IEEE ENGINEERING MEDICINE AND BIOLOGY March/April 1996 Telesurgery and telepresence system Surgeon: Susumu KOBAYASHI Surgeon: Andreas HIRNER Situation of tele-virtual surgery experiment (NHK TV, Tokyo, Japan)


3 3D - -








4 Equipments in the operating room Augmented Navigation Surgery C-arm CT Operating table made of carbon fiber material Ceiling-mounted displays Optical 3D location sensor Image processing computers LCD projector with a transparent screen Operating Room No.9 The operating room has been connected to our institute by an optical fiber network to utilize our visual super computer. Overview of the high-tech operating room Overview of the high-tech operating room We assumed that surgery, such as an endoscopic surgery, that needs the operator to look at a monitor will increase; so we used diffused green lighting that can have its brightness adjusted, instead of the usual operating room lighting, to aid the operators concentration.






 and right (c)")


5 Application for Abdominal Surgery Application for Otorhinolaryngology Stereo-endoscope based navigation Superimposed images on the GWS display (a); the patient s organ models are superimposed onto the surgical field image; top window: the left eye view, bottom window: the right eye view. Figure b, c show left (b) and right (c) eye navigation images displayed on the stereoscopic monitor. a Experiment of Navigation Function for Stereo-Endoscopic Sinus Surgery b c









6 a b c Pointer based navigation The result of the pointer based navigation function. Figure a,b shows a coronal image at the location of the tip of pointer. According to the pointer s movement, the image is changed in the 3D virtual space. The 3D patient s models are also displayed. Figure c shows a sagittal image after changing view point. 3D - - 4D Analysis of Human Body Locomotion Construction of 4D Muscle Models Fundamental Interference with External Force Mutual Interferences During Locomotion




.")



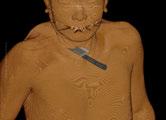
7 4D Visualization of the THA patient Development of 4-dimensional Human Model System for the Patient after Total Hip Arthroplasty Replacement of the implant model with CAD data CAD data Position of the Infrared Markers 4-dimensional Visualization reference points Wearing estimation of the sliding surface Display of the implant with transparent bone!! Register CAD data to the implant model by using surface based registration algorithm(icp,iterative Closest Point). RMS error at the registration was within 0.8 mm. Result of replacement 15 markers were attached to the patient s lower extremity Marker Internal Rotation Adduction Flexion Joint Angle Graph Entire view of the patient s lower extremity Superimpose of the skeletal model onto the video footage Camera calibration by the correspondence of the marker positions in the 2-D image and the 3-D space Superimposed video footage
 for 4D observation, analysis and modeling of human body locomotion Simultaneous measurement of Open MRI and optical")



 The position and angle of the camera (The position and angle of a triangular")

8 Methods (a) OpenMRI (b) Skin surface markers Whole bone Bone surface model from Marker from OpenMRI conventional data MRI data Optical tracking system Angles obtained from Open MRI Angles calculated from the skin surface markers Development of Dynamic Spatial Video Camera (DSVC) for 4D observation, analysis and modeling of human body locomotion Simultaneous measurement of Open MRI and optical 3-D tracking system (a) - (b) = Measurement error The appearance of the constructed DSVC system Method! For the camera assembly, we positioned 60 video cameras around the subject in a circular pattern. Specifically, we designed a 4m diameter ring shaped camera assembly in order to provide a space for the subject to be able to move freely in.! The ring port was hung under a motor controlled crane that is movable along a rail attached to the ceiling of the room.! During filming sequential image data from every 2 camera are stored in 1 ordinal PC (PC clustering). Before filming, the location and direction of each camera was calibrated for the precise reconstruction of a 4D model of the human body movement. Each cameras position and angle was reproduced in virtual space by the camera calibration based on the theory of the self-calibration method. Camera Calibration Instrument for the calibration The focal length of the camera (The height of a triangular pyramid) The position and angle of the camera (The position and angle of a triangular pyramid) The appearance of a 4m diameter ring and crane PC clustering The appearance of the console The origin of the coordinate axis Floor Extraction of subject s shapes from captured images Subject s shapes in images are extracted from captured images by difference of precaptured background images. Resizing of the skeletal model with standard proportion An estimation of 4D skeletal structure in motion The dynamic skeletal state of the swinging foot was visualized by applying tracking data and constructed subject s skeletal model data. Observations of the dynamic skeletal state could be made from any viewpoint and at any time with the developed software. The Extraction of Subject s shapes from captured images (a: Captured images from DSVC, b: Extracted subject s shapes) Resizing of the skeletal model (a: skeletal model with standard proportion, b: constructed subject s skeletal model) The subject s skeletal model was constructed by resizing the skeletal structure of the standard 4D human model based on distance differences between joints. Observing the results of estimated dynamic skeletal state in motion superposed on a 4D body surface model



 and the display image of")
 Skin surface, abdominal")


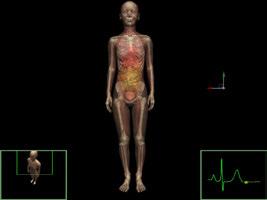
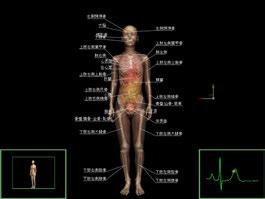
9 Result of full body movement display 4D model in walking motion. a: 4D whole body model, b: skeletal model, c: dendritic model that corresponds to joint group based on anatomical shape of the skeletal model, d: dendritic model that was constructed based on the optical markers Series of video images of the participant s movements (a d) and the display image of the directional movement of the full body model driven by the captured data (a d ) Skin surface, abdominal organs, arteries and veins are deformed by following skeletal model's motion 4D model with muscles Skin surface, abdominal organs, arteries and veins are deformed by following skeletal model's motion Skin surface, abdominal organs, arteries and veins are deformed by following skeletal model's motion








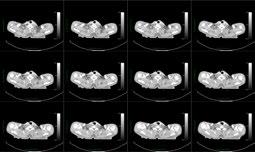
10 We were able to measure the movements of the upper and lower limbs when certain parts moved relatively slowly. A scene of MRI measurement on driving limb in the gantry Time sequential images of each sagittal sectioning planes of MRI data Time-sequential sectioning planes are reconstructed to 4D images of thigh part



11 Movement of the quadriceps femoris during driving limb Sectioning plane of the quadriceps femoris during driving limb on 4D model MRI measurement data was compared with muscle shape in 4D model We compared 4D model and the MRI measurement result concerning movements of the lower muscles including quadriceps femoris. Changes in the muscle length resulted in errors of 5% nearly OK Changes in the area of the muscle section resulted in errors from 5% to 30% To be discussed later Evaluations for the muscle shape Methods under consideration We think large deformation of major organs and blood vessels due to body movement can endure clinical use with the current 4D model. For deformation of muscle systems We will make revisions according to the role of the muscles of the deformation model and deformation parameter. We will use the MRI measurement results obtained from the movement of the limb that we developed this time to set the parameter of the above. Conclusion! By the method we presented, we enabled the quantitative display of changes of the soft tissue and body surface according to body motion using patient oriented data, which was not possible by the current diagnostic imaging equipment.! Doctors can only imagine the inner structure of the body when in motion. But we believe this method will contribute to doctors being able to actually see inside the body and make better analysis.
Navigation System for ACL Reconstruction Using Registration between Multi-Viewpoint X-ray Images and CT Images
 Navigation System for ACL Reconstruction Using Registration between Multi-Viewpoint X-ray Images and CT Images Mamoru Kuga a*, Kazunori Yasuda b, Nobuhiko Hata a, Takeyoshi Dohi a a Graduate School of
Navigation System for ACL Reconstruction Using Registration between Multi-Viewpoint X-ray Images and CT Images Mamoru Kuga a*, Kazunori Yasuda b, Nobuhiko Hata a, Takeyoshi Dohi a a Graduate School of
Optical Guidance. Sanford L. Meeks. July 22, 2010
 Optical Guidance Sanford L. Meeks July 22, 2010 Optical Tracking Optical tracking is a means of determining in real-time the position of a patient relative to the treatment unit. Markerbased systems track
Optical Guidance Sanford L. Meeks July 22, 2010 Optical Tracking Optical tracking is a means of determining in real-time the position of a patient relative to the treatment unit. Markerbased systems track
Tracked surgical drill calibration
 Tracked surgical drill calibration An acetabular fracture is a break in the socket portion of the "ball-and-socket" hip joint. The majority of acetabular fractures are caused by some type of highenergy
Tracked surgical drill calibration An acetabular fracture is a break in the socket portion of the "ball-and-socket" hip joint. The majority of acetabular fractures are caused by some type of highenergy
3D Ultrasound Reconstruction By The 3 Cons: Michael Golden Khayriyyah Munir Omid Nasser Bigdeli
 3D Ultrasound Reconstruction By The 3 Cons: Michael Golden Khayriyyah Munir Omid Nasser Bigdeli Client Contact: Dr. Joseph McIsaac Hartford Hospital 80 Seymour St. PO Box 5037 Hartford, CT 06102 (860)
3D Ultrasound Reconstruction By The 3 Cons: Michael Golden Khayriyyah Munir Omid Nasser Bigdeli Client Contact: Dr. Joseph McIsaac Hartford Hospital 80 Seymour St. PO Box 5037 Hartford, CT 06102 (860)
Applications. Systems. Motion capture pipeline. Biomechanical analysis. Graphics research
 Motion capture Applications Systems Motion capture pipeline Biomechanical analysis Graphics research Applications Computer animation Biomechanics Robotics Cinema Video games Anthropology What is captured?
Motion capture Applications Systems Motion capture pipeline Biomechanical analysis Graphics research Applications Computer animation Biomechanics Robotics Cinema Video games Anthropology What is captured?
A Study of Medical Image Analysis System
 Indian Journal of Science and Technology, Vol 8(25), DOI: 10.17485/ijst/2015/v8i25/80492, October 2015 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 A Study of Medical Image Analysis System Kim Tae-Eun
Indian Journal of Science and Technology, Vol 8(25), DOI: 10.17485/ijst/2015/v8i25/80492, October 2015 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 A Study of Medical Image Analysis System Kim Tae-Eun
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Computed tomography (Item No.: P )
") Computed tomography (Item No.: P2550100) Curricular Relevance Area of Expertise: Biology Education Level: University Topic: Modern Imaging Methods Subtopic: X-ray Imaging Experiment: Computed tomography
Computed tomography (Item No.: P2550100) Curricular Relevance Area of Expertise: Biology Education Level: University Topic: Modern Imaging Methods Subtopic: X-ray Imaging Experiment: Computed tomography
Orthopedic Devices The Future is Powered by Embedded Technology Axiomtek Co. Ltd., All Rights Reserved.
 Orthopedic Devices The Future is Powered by Embedded Technology 2017 Axiomtek Co. Ltd., All Rights Reserved. The orthopedics medical device industry landscape is changing with the utilization of advanced
Orthopedic Devices The Future is Powered by Embedded Technology 2017 Axiomtek Co. Ltd., All Rights Reserved. The orthopedics medical device industry landscape is changing with the utilization of advanced
LEAD LOCALIZATION. Version 1.0. Software User Guide Revision 1.1. Copyright 2018, Brainlab AG Germany. All rights reserved.
 LEAD LOCALIZATION Version 1.0 Software User Guide Revision 1.1 Copyright 2018, Brainlab AG Germany. All rights reserved. TABLE OF CONTENTS TABLE OF CONTENTS 1 GENERAL INFORMATION...5 1.1 Contact Data...5
LEAD LOCALIZATION Version 1.0 Software User Guide Revision 1.1 Copyright 2018, Brainlab AG Germany. All rights reserved. TABLE OF CONTENTS TABLE OF CONTENTS 1 GENERAL INFORMATION...5 1.1 Contact Data...5
Improved Navigated Spine Surgery Utilizing Augmented Reality Visualization
 Improved Navigated Spine Surgery Utilizing Augmented Reality Visualization Zein Salah 1,2, Bernhard Preim 1, Erck Elolf 3, Jörg Franke 4, Georg Rose 2 1Department of Simulation and Graphics, University
Improved Navigated Spine Surgery Utilizing Augmented Reality Visualization Zein Salah 1,2, Bernhard Preim 1, Erck Elolf 3, Jörg Franke 4, Georg Rose 2 1Department of Simulation and Graphics, University
Avatar Communication: Virtual Instructor in the Demonstration Exhibit
 Avatar Communication: Virtual Instructor in the Demonstration Exhibit Tetsuro Ogi 1, 2, 3, Toshio Yamada 1, Takuro Kayahara 1, 2, Yuji Kurita 1 1 Telecommunications Advancement Organization of Japan 2
Avatar Communication: Virtual Instructor in the Demonstration Exhibit Tetsuro Ogi 1, 2, 3, Toshio Yamada 1, Takuro Kayahara 1, 2, Yuji Kurita 1 1 Telecommunications Advancement Organization of Japan 2
Computed tomography of simple objects. Related topics. Principle. Equipment TEP Beam hardening, artefacts, and algorithms
 Related topics Beam hardening, artefacts, and algorithms Principle The CT principle is demonstrated with the aid of simple objects. In the case of very simple targets, only a few images need to be taken
Related topics Beam hardening, artefacts, and algorithms Principle The CT principle is demonstrated with the aid of simple objects. In the case of very simple targets, only a few images need to be taken
3D Ultrasound System Using a Magneto-optic Hybrid Tracker for Augmented Reality Visualization in Laparoscopic Liver Surgery
 3D Ultrasound System Using a Magneto-optic Hybrid Tracker for Augmented Reality Visualization in Laparoscopic Liver Surgery Masahiko Nakamoto 1, Yoshinobu Sato 1, Masaki Miyamoto 1, Yoshikazu Nakamjima
3D Ultrasound System Using a Magneto-optic Hybrid Tracker for Augmented Reality Visualization in Laparoscopic Liver Surgery Masahiko Nakamoto 1, Yoshinobu Sato 1, Masaki Miyamoto 1, Yoshikazu Nakamjima
Computational Medical Imaging Analysis Chapter 4: Image Visualization
 Computational Medical Imaging Analysis Chapter 4: Image Visualization Jun Zhang Laboratory for Computational Medical Imaging & Data Analysis Department of Computer Science University of Kentucky Lexington,
Computational Medical Imaging Analysis Chapter 4: Image Visualization Jun Zhang Laboratory for Computational Medical Imaging & Data Analysis Department of Computer Science University of Kentucky Lexington,
INTRODUCTION TO MEDICAL IMAGING- 3D LOCALIZATION LAB MANUAL 1. Modifications for P551 Fall 2013 Medical Physics Laboratory
 INTRODUCTION TO MEDICAL IMAGING- 3D LOCALIZATION LAB MANUAL 1 Modifications for P551 Fall 2013 Medical Physics Laboratory Introduction Following the introductory lab 0, this lab exercise the student through
INTRODUCTION TO MEDICAL IMAGING- 3D LOCALIZATION LAB MANUAL 1 Modifications for P551 Fall 2013 Medical Physics Laboratory Introduction Following the introductory lab 0, this lab exercise the student through
Computed Photography - Final Project Endoscope Exploration on Knee Surface
 15-862 Computed Photography - Final Project Endoscope Exploration on Knee Surface Chenyu Wu Robotics Institute, Nov. 2005 Abstract Endoscope is widely used in the minimally invasive surgery. However the
15-862 Computed Photography - Final Project Endoscope Exploration on Knee Surface Chenyu Wu Robotics Institute, Nov. 2005 Abstract Endoscope is widely used in the minimally invasive surgery. However the
Alternative Designs Report 3D Ultrasound Reconstruction By: Michael Golden Khayriyyah Munir Omid Nasser Bidgeli. Team #3. Client: Dr.
 Alternative Designs Report 3D Ultrasound Reconstruction By: Michael Golden Khayriyyah Munir Omid Nasser Bidgeli Team #3 Client: Dr. Joseph McIsaac Alternative Design 1- Camera Mounting Two cameras will
Alternative Designs Report 3D Ultrasound Reconstruction By: Michael Golden Khayriyyah Munir Omid Nasser Bidgeli Team #3 Client: Dr. Joseph McIsaac Alternative Design 1- Camera Mounting Two cameras will
Construction Progress Management and Interior Work Analysis Using Kinect 3D Image Sensors
 33 rd International Symposium on Automation and Robotics in Construction (ISARC 2016) Construction Progress Management and Interior Work Analysis Using Kinect 3D Image Sensors Kosei Ishida 1 1 School of
33 rd International Symposium on Automation and Robotics in Construction (ISARC 2016) Construction Progress Management and Interior Work Analysis Using Kinect 3D Image Sensors Kosei Ishida 1 1 School of
OPMI Vario/S 88 System Expand your vision
 OPMI Vario/S 88 System Expand your vision OPMI Vario/S 88 System See the difference ZEISS makes 2 Extend your horizons OPMI Vario/S 88 System Photos: Courtesy of Professor emeritus Atsushi Komatsuzaki,
OPMI Vario/S 88 System Expand your vision OPMI Vario/S 88 System See the difference ZEISS makes 2 Extend your horizons OPMI Vario/S 88 System Photos: Courtesy of Professor emeritus Atsushi Komatsuzaki,
SYNFRAME RL AND SYNFRAME
 SYNFRAME RL AND SYNFRAME Modular approach ach and retraction system Instruments and implants approved by the AO Foundation. This publication is not intended for distribution in the USA. SURGICAL TECHNIQUE
SYNFRAME RL AND SYNFRAME Modular approach ach and retraction system Instruments and implants approved by the AO Foundation. This publication is not intended for distribution in the USA. SURGICAL TECHNIQUE
Motion Control of Wearable Walking Support System with Accelerometer Considering Swing Phase Support
 Proceedings of the 17th IEEE International Symposium on Robot and Human Interactive Communication, Technische Universität München, Munich, Germany, August 1-3, Motion Control of Wearable Walking Support
Proceedings of the 17th IEEE International Symposium on Robot and Human Interactive Communication, Technische Universität München, Munich, Germany, August 1-3, Motion Control of Wearable Walking Support
Optimal Planning of Robotically Assisted Heart Surgery: Transfer Precision in the Operating Room
 Optimal Planning of Robotically Assisted Heart Surgery: Transfer Precision in the Operating Room Ève Coste-Manière 1, Louaï Adhami 1, Fabien Mourgues 1, Olivier Bantiche 1, David Le 2, David Hunt 2, Nick
Optimal Planning of Robotically Assisted Heart Surgery: Transfer Precision in the Operating Room Ève Coste-Manière 1, Louaï Adhami 1, Fabien Mourgues 1, Olivier Bantiche 1, David Le 2, David Hunt 2, Nick
Sensor-aided Milling with a Surgical Robot System
 1 Sensor-aided Milling with a Surgical Robot System Dirk Engel, Joerg Raczkowsky, Heinz Woern Institute for Process Control and Robotics (IPR), Universität Karlsruhe (TH) Engler-Bunte-Ring 8, 76131 Karlsruhe
1 Sensor-aided Milling with a Surgical Robot System Dirk Engel, Joerg Raczkowsky, Heinz Woern Institute for Process Control and Robotics (IPR), Universität Karlsruhe (TH) Engler-Bunte-Ring 8, 76131 Karlsruhe
Fully Automatic Endoscope Calibration for Intraoperative Use
 Fully Automatic Endoscope Calibration for Intraoperative Use Christian Wengert, Mireille Reeff, Philippe C. Cattin, Gábor Székely Computer Vision Laboratory, ETH Zurich, 8092 Zurich, Switzerland {wengert,
Fully Automatic Endoscope Calibration for Intraoperative Use Christian Wengert, Mireille Reeff, Philippe C. Cattin, Gábor Székely Computer Vision Laboratory, ETH Zurich, 8092 Zurich, Switzerland {wengert,
Augmented Reality System for Oral Surgery Using 3D Auto Stereoscopic Visualization
 Augmented Reality System for Oral Surgery Using 3D Auto Stereoscopic Visualization Huy Hoang Tran 1, Hideyuki Suenaga 2,KentaKuwana 1, Ken Masamune 1, Takeyoshi Dohi 1, Susumu Nakajima 2, and Hongen Liao
Augmented Reality System for Oral Surgery Using 3D Auto Stereoscopic Visualization Huy Hoang Tran 1, Hideyuki Suenaga 2,KentaKuwana 1, Ken Masamune 1, Takeyoshi Dohi 1, Susumu Nakajima 2, and Hongen Liao
 SIMULATION OF POSTOPERATIVE 3D FACIAL MORPHOLOGY USING PHYSICS-BASED HEAD MODEL Yoshimitsu AOKI*, Shuji Hashimoto*, Masahiko Terajima**, Akihiko Nakasima** * Waseda University, Japan Department of Applied
SIMULATION OF POSTOPERATIVE 3D FACIAL MORPHOLOGY USING PHYSICS-BASED HEAD MODEL Yoshimitsu AOKI*, Shuji Hashimoto*, Masahiko Terajima**, Akihiko Nakasima** * Waseda University, Japan Department of Applied
Research on Laser Positioning Technology of CMOS Triangulation for Precision Surgery
 Research on Laser Positioning Technology of CMOS Triangulation for Precision Surgery Abstract Huihui Zhang a, Haiyan Jin b, Na Shao c and Shunhua Wang d, * Qingdao Municipal Hospital, Qingdao 266000, China
Research on Laser Positioning Technology of CMOS Triangulation for Precision Surgery Abstract Huihui Zhang a, Haiyan Jin b, Na Shao c and Shunhua Wang d, * Qingdao Municipal Hospital, Qingdao 266000, China
The Quantification of Volumetric Asymmetry by Dynamic Surface Topography. Thomas Shannon Oxford Brookes University Oxford, U.K.
 The Quantification of Volumetric Asymmetry by Dynamic Surface Topography Thomas Shannon Oxford Brookes University Oxford, U.K. The psychosocial impact of the cosmetic defect on Adolescent Idiopathic Scoliosis
The Quantification of Volumetric Asymmetry by Dynamic Surface Topography Thomas Shannon Oxford Brookes University Oxford, U.K. The psychosocial impact of the cosmetic defect on Adolescent Idiopathic Scoliosis
Augmenting Reality with Projected Interactive Displays
 Augmenting Reality with Projected Interactive Displays Claudio Pinhanez IBM T.J. Watson Research Center, P.O. Box 218 Yorktown Heights, N.Y. 10598, USA Abstract. This paper examines a steerable projection
Augmenting Reality with Projected Interactive Displays Claudio Pinhanez IBM T.J. Watson Research Center, P.O. Box 218 Yorktown Heights, N.Y. 10598, USA Abstract. This paper examines a steerable projection
Depth Camera Calibration and Knife Tip Position Estimation for Liver Surgery Support System
 Depth Camera Calibration and Knife Tip Position Estimation for Liver Surgery Support System Masanao Koeda 1, Akio Tsukushi 1, Hiroshi Noborio 1, Katsuhiko Onishi 1, Kiminori Mizushino 2, Takahiro Kunii
Depth Camera Calibration and Knife Tip Position Estimation for Liver Surgery Support System Masanao Koeda 1, Akio Tsukushi 1, Hiroshi Noborio 1, Katsuhiko Onishi 1, Kiminori Mizushino 2, Takahiro Kunii
A model-based approach for tool tracking in laparoscopy
 A model-based approach for tool tracking in laparoscopy Potential applications and evaluation challenges Sandrine Voros (INSERM), TIMC-IMAG laboratory Computer Assisted Medical Interventions (CAMI) team
A model-based approach for tool tracking in laparoscopy Potential applications and evaluation challenges Sandrine Voros (INSERM), TIMC-IMAG laboratory Computer Assisted Medical Interventions (CAMI) team
THE BEST WAY TO OPERATE
 THE BEST WAY TO OPERATE TABLE OF CONTENTS 01 ABOUT US MULTIMEDIAMEDICAL is a multimedia centre 02 03 VIDEOSURGERY MULTIMEDIAMEDICAL offers highly specialized recording of surgery TRAINING Multimedia platform
THE BEST WAY TO OPERATE TABLE OF CONTENTS 01 ABOUT US MULTIMEDIAMEDICAL is a multimedia centre 02 03 VIDEOSURGERY MULTIMEDIAMEDICAL offers highly specialized recording of surgery TRAINING Multimedia platform
Copyright 2017 Medical IP - Tutorial Medip v /2018, Revision
 Copyright 2017 Medical IP - Tutorial Medip v.1.0.0.9 01/2018, Revision 1.0.0.2 List of Contents 1. Introduction......................................................... 2 2. Overview..............................................................
Copyright 2017 Medical IP - Tutorial Medip v.1.0.0.9 01/2018, Revision 1.0.0.2 List of Contents 1. Introduction......................................................... 2 2. Overview..............................................................
Gamepad Controls. Figure 1: A diagram of an Xbox controller. Figure 2: A screenshot of the BodyViz Controller Panel. BodyViz 3 User Manual 1
 BodyViz User Manual Gamepad Controls The first step in becoming an expert BodyViz user is to get acquainted with the Xbox gamepad, also known as a controller, and the BodyViz Controller Panel. These can
BodyViz User Manual Gamepad Controls The first step in becoming an expert BodyViz user is to get acquainted with the Xbox gamepad, also known as a controller, and the BodyViz Controller Panel. These can
Automatic Patient Registration for Port Placement in Minimally Invasive Endoscopic Surgery
 Automatic Patient Registration for Port Placement in Minimally Invasive Endoscopic Surgery Marco Feuerstein 1,2, Stephen M. Wildhirt 2, Robert Bauernschmitt 2, and Nassir Navab 1 1 Computer Aided Medical
Automatic Patient Registration for Port Placement in Minimally Invasive Endoscopic Surgery Marco Feuerstein 1,2, Stephen M. Wildhirt 2, Robert Bauernschmitt 2, and Nassir Navab 1 1 Computer Aided Medical
A Method for Tracking the Camera Motion of Real Endoscope by Epipolar Geometry Analysis and Virtual Endoscopy System
 A Method for Tracking the Camera Motion of Real Endoscope by Epipolar Geometry Analysis and Virtual Endoscopy System Kensaku Mori 1,2, Daisuke Deguchi 2, Jun-ichi Hasegawa 3, Yasuhito Suenaga 2, Jun-ichiro
A Method for Tracking the Camera Motion of Real Endoscope by Epipolar Geometry Analysis and Virtual Endoscopy System Kensaku Mori 1,2, Daisuke Deguchi 2, Jun-ichi Hasegawa 3, Yasuhito Suenaga 2, Jun-ichiro
Introduction. Biomedical Image Analysis. Contents. Prof. Dr. Philippe Cattin. MIAC, University of Basel. Feb 22nd, of
 Introduction Prof. Dr. Philippe Cattin MIAC, University of Basel Contents Abstract 1 Varia About Me About these Slides 2 My Research 2.1 Segmentation Segmentation of Facial Soft Tissues Segmentation of
Introduction Prof. Dr. Philippe Cattin MIAC, University of Basel Contents Abstract 1 Varia About Me About these Slides 2 My Research 2.1 Segmentation Segmentation of Facial Soft Tissues Segmentation of
Human body animation. Computer Animation. Human Body Animation. Skeletal Animation
 Computer Animation Aitor Rovira March 2010 Human body animation Based on slides by Marco Gillies Human Body Animation Skeletal Animation Skeletal Animation (FK, IK) Motion Capture Motion Editing (retargeting,
Computer Animation Aitor Rovira March 2010 Human body animation Based on slides by Marco Gillies Human Body Animation Skeletal Animation Skeletal Animation (FK, IK) Motion Capture Motion Editing (retargeting,
Development and Human Factors Analysis of Neuronavigation vs. Augmented Reality
 Development and Human Factors Analysis of Neuronavigation vs. Augmented Reality Abhilash Pandya 1, 3, Mohammad-Reza Siadat 2, Greg Auner 1, 3, Mohammad Kalash 1, R. Darin Ellis 3, 4 1 Electrical and Computer
Development and Human Factors Analysis of Neuronavigation vs. Augmented Reality Abhilash Pandya 1, 3, Mohammad-Reza Siadat 2, Greg Auner 1, 3, Mohammad Kalash 1, R. Darin Ellis 3, 4 1 Electrical and Computer
Computational Medical Imaging Analysis
 Computational Medical Imaging Analysis Chapter 1: Introduction to Imaging Science Jun Zhang Laboratory for Computational Medical Imaging & Data Analysis Department of Computer Science University of Kentucky
Computational Medical Imaging Analysis Chapter 1: Introduction to Imaging Science Jun Zhang Laboratory for Computational Medical Imaging & Data Analysis Department of Computer Science University of Kentucky
Introducing Computer-Assisted Surgery into combined PET/CT image based Biopsy
 Introducing Computer-Assisted Surgery into combined PET/CT image based Biopsy Santos TO(1), Weitzel T(2), Klaeser B(2), Reyes M(1), Weber S(1) 1 - Artorg Center, University of Bern, Bern, Switzerland 2
Introducing Computer-Assisted Surgery into combined PET/CT image based Biopsy Santos TO(1), Weitzel T(2), Klaeser B(2), Reyes M(1), Weber S(1) 1 - Artorg Center, University of Bern, Bern, Switzerland 2
MUSCULOSKELETAL SIMULATION :
 TUTORIAL MUSCULOSKELETAL SIMULATION : FROM MOTION CAPTURE TO MUSCULAR ACTIVITY IN LOWER LIMB MODELS Nicolas Pronost and Anders Sandholm Musculoskeletal simulation? What is it? 2 Musculoskeletal simulation?
TUTORIAL MUSCULOSKELETAL SIMULATION : FROM MOTION CAPTURE TO MUSCULAR ACTIVITY IN LOWER LIMB MODELS Nicolas Pronost and Anders Sandholm Musculoskeletal simulation? What is it? 2 Musculoskeletal simulation?
MODELLING OF PROSTHETIC HIP JOINT GENERATED FROM CT SCAN DATA Mahender Koduri 1, G Krishna Teja 2, O Rajender 3 1,2,3
 MODELLING OF PROSTHETIC HIP JOINT GENERATED FROM CT SCAN DATA Mahender Koduri 1, G Krishna Teja 2, O Rajender 3 1,2,3 Asst. Professor, Dept. of Mech. Engg. AGI ABSTRACT Total hip arthroplasty is a surgical
MODELLING OF PROSTHETIC HIP JOINT GENERATED FROM CT SCAN DATA Mahender Koduri 1, G Krishna Teja 2, O Rajender 3 1,2,3 Asst. Professor, Dept. of Mech. Engg. AGI ABSTRACT Total hip arthroplasty is a surgical
microscope OP-Dent-5
 microscope OP-Dent-5 OP-Dent-5 The OP-Dent-5 microscope manufactured by OP- TOMIC fulfils the most demanding requirements in the dental field. The OP-Dent-5 microscope offers one of the widest ranges of
microscope OP-Dent-5 OP-Dent-5 The OP-Dent-5 microscope manufactured by OP- TOMIC fulfils the most demanding requirements in the dental field. The OP-Dent-5 microscope offers one of the widest ranges of
Interpolation and extrapolation of motion capture data
 Interpolation and extrapolation of motion capture data Kiyoshi Hoshino Biological Cybernetics Lab, University of the Ryukyus and PRESTO-SORST, Japan Science and Technology Corporation Nishihara, Okinawa
Interpolation and extrapolation of motion capture data Kiyoshi Hoshino Biological Cybernetics Lab, University of the Ryukyus and PRESTO-SORST, Japan Science and Technology Corporation Nishihara, Okinawa
Motion Capture and Its Application for Vehicle Ingress/Egress
 Motion Capture and Its Application for Vehicle Ingress/Egress N. WANG*, G. GOMEZ-LEVI, K. KOZAK and J. WAN Research and Advanced Engineering, Ford Motor Company, USA Abstract Understanding how drivers
Motion Capture and Its Application for Vehicle Ingress/Egress N. WANG*, G. GOMEZ-LEVI, K. KOZAK and J. WAN Research and Advanced Engineering, Ford Motor Company, USA Abstract Understanding how drivers
Medical Image Registration by Maximization of Mutual Information
 Medical Image Registration by Maximization of Mutual Information EE 591 Introduction to Information Theory Instructor Dr. Donald Adjeroh Submitted by Senthil.P.Ramamurthy Damodaraswamy, Umamaheswari Introduction
Medical Image Registration by Maximization of Mutual Information EE 591 Introduction to Information Theory Instructor Dr. Donald Adjeroh Submitted by Senthil.P.Ramamurthy Damodaraswamy, Umamaheswari Introduction
7 Modelling and Animating Human Figures. Chapter 7. Modelling and Animating Human Figures. Department of Computer Science and Engineering 7-1
 Modelling and Animating Human Figures 7-1 Introduction Modeling and animating an articulated figure is one of the most formidable tasks that an animator can be faced with. It is especially challenging
Modelling and Animating Human Figures 7-1 Introduction Modeling and animating an articulated figure is one of the most formidable tasks that an animator can be faced with. It is especially challenging
Real-time self-calibration of a tracked augmented reality display
 Real-time self-calibration of a tracked augmented reality display Zachary Baum, Andras Lasso, Tamas Ungi, Gabor Fichtinger Laboratory for Percutaneous Surgery, Queen s University, Kingston, Canada ABSTRACT
Real-time self-calibration of a tracked augmented reality display Zachary Baum, Andras Lasso, Tamas Ungi, Gabor Fichtinger Laboratory for Percutaneous Surgery, Queen s University, Kingston, Canada ABSTRACT
MR-Guided Mixed Reality for Breast Conserving Surgical Planning
 MR-Guided Mixed Reality for Breast Conserving Surgical Planning Suba Srinivasan (subashini7@gmail.com) March 30 th 2017 Mentors: Prof. Brian A. Hargreaves, Prof. Bruce L. Daniel MEDICINE MRI Guided Mixed
MR-Guided Mixed Reality for Breast Conserving Surgical Planning Suba Srinivasan (subashini7@gmail.com) March 30 th 2017 Mentors: Prof. Brian A. Hargreaves, Prof. Bruce L. Daniel MEDICINE MRI Guided Mixed
Tomographic Reconstruction
 Tomographic Reconstruction 3D Image Processing Torsten Möller Reading Gonzales + Woods, Chapter 5.11 2 Overview Physics History Reconstruction basic idea Radon transform Fourier-Slice theorem (Parallel-beam)
Tomographic Reconstruction 3D Image Processing Torsten Möller Reading Gonzales + Woods, Chapter 5.11 2 Overview Physics History Reconstruction basic idea Radon transform Fourier-Slice theorem (Parallel-beam)
Human Arm Simulation Using Kinect
 Human Arm Simulation Using Kinect Nikunj Agarwal 1, Priya Bajaj 2, Jayesh Pal 3, Piyush Kushwaha 4 1,2,3,4 Student, Computer Science & Engineering Department, IMS Engineering College, Ghaziabad, Uttar
Human Arm Simulation Using Kinect Nikunj Agarwal 1, Priya Bajaj 2, Jayesh Pal 3, Piyush Kushwaha 4 1,2,3,4 Student, Computer Science & Engineering Department, IMS Engineering College, Ghaziabad, Uttar
HS ALLEGRA 300. Setting the pace
 Setting the pace Tradition and innovation Since 1858 visionary thinking and a fascination with technology have guided us to develop innovative products of outstanding reliability: Anticipating trends to
Setting the pace Tradition and innovation Since 1858 visionary thinking and a fascination with technology have guided us to develop innovative products of outstanding reliability: Anticipating trends to
Dynamic Superimposition of Synthetic Objects on Rigid and Simple-deformable Real Objects
 Dynamic Superimposition of Synthetic Objects on Rigid and Simple-deformable Real Objects Yann Argotti, Larry Davis, Valerie Outters, and Jannick P. Rolland School of Electrical Engineering and Computer
Dynamic Superimposition of Synthetic Objects on Rigid and Simple-deformable Real Objects Yann Argotti, Larry Davis, Valerie Outters, and Jannick P. Rolland School of Electrical Engineering and Computer
Research and Literature Review on Developing Motion Capture System for Analyzing Athletes Action
 International Conference on Education Technology, Management and Humanities Science (ETMHS 2015) Research and Literature Review on Developing Motion Capture System for Analyzing Athletes Action HAN Fang
International Conference on Education Technology, Management and Humanities Science (ETMHS 2015) Research and Literature Review on Developing Motion Capture System for Analyzing Athletes Action HAN Fang
OPMI Vario/S 88 System Expand your vision
 Surgical Microscopes from Carl Zeiss OPMI Vario/S 88 System Expand your vision We make it visible. OPMI Vario/S 88 System See the difference Zeiss makes 2 Extend your horizons OPMI Vario/S 88 System Photos:
Surgical Microscopes from Carl Zeiss OPMI Vario/S 88 System Expand your vision We make it visible. OPMI Vario/S 88 System See the difference Zeiss makes 2 Extend your horizons OPMI Vario/S 88 System Photos:
Intramedullary Nail Distal Hole Axis Estimation using Blob Analysis and Hough Transform
 Intramedullary Nail Distal Hole Axis Estimation using Blob Analysis and Hough Transform Chatchai Neatpisarnvanit Department of Electrical Engineering Mahidol University Nakorn Pathom, Thailand egcnp@mahidol.ac.th
Intramedullary Nail Distal Hole Axis Estimation using Blob Analysis and Hough Transform Chatchai Neatpisarnvanit Department of Electrical Engineering Mahidol University Nakorn Pathom, Thailand egcnp@mahidol.ac.th
Extract Features. 2-D and 3-D Analysis. Markerless Tracking. Create Data Reports
 Extract Features 2-D and 3-D Analysis Markerless Tracking Create Data Reports Extract ProAnalyst provides motion analysis tools that can be applied to any video or image sequence, regardless of content
Extract Features 2-D and 3-D Analysis Markerless Tracking Create Data Reports Extract ProAnalyst provides motion analysis tools that can be applied to any video or image sequence, regardless of content
Measurement of 3D Foot Shape Deformation in Motion
 Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
CHAPTER 2: THREE DIMENSIONAL TOPOGRAPHICAL MAPPING SYSTEM. Target Object
 CHAPTER 2: THREE DIMENSIONAL TOPOGRAPHICAL MAPPING SYSTEM 2.1 Theory and Construction Target Object Laser Projector CCD Camera Host Computer / Image Processor Figure 2.1 Block Diagram of 3D Areal Mapper
CHAPTER 2: THREE DIMENSIONAL TOPOGRAPHICAL MAPPING SYSTEM 2.1 Theory and Construction Target Object Laser Projector CCD Camera Host Computer / Image Processor Figure 2.1 Block Diagram of 3D Areal Mapper
Design approach for a Highly Accurate Patient Positioning System for NPTC
 Design approach for a Highly Accurate Patient Positioning System for NPTC J. Flanz, K. Gall, M. Goitein, S. Rosenthal, and A. Smith, Massachusetts General Hospital, Bosoton MA L. Nissley, G. Silke, T.
Design approach for a Highly Accurate Patient Positioning System for NPTC J. Flanz, K. Gall, M. Goitein, S. Rosenthal, and A. Smith, Massachusetts General Hospital, Bosoton MA L. Nissley, G. Silke, T.
Image Thickness Correction for Navigation with 3D Intra-cardiac Ultrasound Catheter
 Image Thickness Correction for Navigation with 3D Intra-cardiac Ultrasound Catheter Hua Zhong 1, Takeo Kanade 1,andDavidSchwartzman 2 1 Computer Science Department, Carnegie Mellon University, USA 2 University
Image Thickness Correction for Navigation with 3D Intra-cardiac Ultrasound Catheter Hua Zhong 1, Takeo Kanade 1,andDavidSchwartzman 2 1 Computer Science Department, Carnegie Mellon University, USA 2 University
Animation COM3404. Richard Everson. School of Engineering, Computer Science and Mathematics University of Exeter
 Animation COM3404 Richard Everson School of Engineering, Computer Science and Mathematics University of Exeter R.M.Everson@exeter.ac.uk http://www.secamlocal.ex.ac.uk/studyres/com304 Richard Everson Animation
Animation COM3404 Richard Everson School of Engineering, Computer Science and Mathematics University of Exeter R.M.Everson@exeter.ac.uk http://www.secamlocal.ex.ac.uk/studyres/com304 Richard Everson Animation
An Accuracy Approach to Robotic Microsurgery in the Ear
 An Accuracy Approach to Robotic Microsurgery in the Ear B. Bell¹,J.Salzmann 1, E.Nielsen 3, N.Gerber 1, G.Zheng 1, L.Nolte 1, C.Stieger 4, M.Caversaccio², S. Weber 1 ¹ Institute for Surgical Technologies
An Accuracy Approach to Robotic Microsurgery in the Ear B. Bell¹,J.Salzmann 1, E.Nielsen 3, N.Gerber 1, G.Zheng 1, L.Nolte 1, C.Stieger 4, M.Caversaccio², S. Weber 1 ¹ Institute for Surgical Technologies
Leksell SurgiPlan. Powerful planning for success
 Leksell SurgiPlan Powerful planning for success Making a difference in surgical planning Leksell SurgiPlan Leksell SurgiPlan is an advanced image-based neurosurgical planning software, specifically designed
Leksell SurgiPlan Powerful planning for success Making a difference in surgical planning Leksell SurgiPlan Leksell SurgiPlan is an advanced image-based neurosurgical planning software, specifically designed
HS Hi-R NEO 900 For first class surgery
 HS Hi-R NEO 900 For first class surgery Strong Name Strong Product Our highlights: Enjoy high optical visualization with Haag-Streit SurgicaL s microscope HS Hi-R NEO 900 for ophthalmology and hand surgery.
HS Hi-R NEO 900 For first class surgery Strong Name Strong Product Our highlights: Enjoy high optical visualization with Haag-Streit SurgicaL s microscope HS Hi-R NEO 900 for ophthalmology and hand surgery.
CS 231. Deformation simulation (and faces)
") CS 231 Deformation simulation (and faces) Deformation BODY Simulation Discretization Spring-mass models difficult to model continuum properties Simple & fast to implement and understand Finite Element
CS 231 Deformation simulation (and faces) Deformation BODY Simulation Discretization Spring-mass models difficult to model continuum properties Simple & fast to implement and understand Finite Element
Automatic Recognition of Postoperative Shoulder Surgery Physical Therapy Exercises from Depth Camera Images
 Proceedings of The National Conference On Undergraduate Research (NCUR) 2015 Eastern Washington University, Cheney, WA April 16-18, 2015 Automatic Recognition of Postoperative Shoulder Surgery Physical
Proceedings of The National Conference On Undergraduate Research (NCUR) 2015 Eastern Washington University, Cheney, WA April 16-18, 2015 Automatic Recognition of Postoperative Shoulder Surgery Physical
(b) (a) 394 H. Liao et al. Fig.1 System configuration
 (a) 394 H. Liao et al. Fig.1 System configuration") 394 H. Liao et al. PC 3-D Voxel Data MRI etc. RS232C RGB IP Display Optical Tracking System Probe control equipment Fig.1 System configuration We use optical 3-D tracking system to track the position of
394 H. Liao et al. PC 3-D Voxel Data MRI etc. RS232C RGB IP Display Optical Tracking System Probe control equipment Fig.1 System configuration We use optical 3-D tracking system to track the position of
Exam in DD2426 Robotics and Autonomous Systems
 Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Basic Training Course for Robotic Console Surgeon Standard Da Vinci Surgical System Setup Tutorial
 Materials: Power point slide presentation Torso trainer Basic Training Course for Robotic Console Surgeon Standard Da Vinci Surgical System Laparoscopes (0 o, 30 o ) 3 Sterile adapters Instrument arm drape
Materials: Power point slide presentation Torso trainer Basic Training Course for Robotic Console Surgeon Standard Da Vinci Surgical System Laparoscopes (0 o, 30 o ) 3 Sterile adapters Instrument arm drape
Fraunhofer Heinrich Hertz Institute: Innovations in Medical Technology
 : Innovations in Medical Technology Michael Witte - Berlin, Germany / Cambridge, MA www.hhi.fraunhofer.de Within the Association Key figures Association 80 research units 22.000 employees Budget (2012):
: Innovations in Medical Technology Michael Witte - Berlin, Germany / Cambridge, MA www.hhi.fraunhofer.de Within the Association Key figures Association 80 research units 22.000 employees Budget (2012):
Robot Control for Medical Applications and Hair Transplantation
 Dr. John Tenney Director of Research Restoration Robotics, Inc. Robot Control for Medical Applications and Hair Transplantation Presented to the IEEE Control Systems Society, Santa Clara Valley 18 November
Dr. John Tenney Director of Research Restoration Robotics, Inc. Robot Control for Medical Applications and Hair Transplantation Presented to the IEEE Control Systems Society, Santa Clara Valley 18 November
Shadow casting. What is the problem? Cone Beam Computed Tomography THE OBJECTIVES OF DIAGNOSTIC IMAGING IDEAL DIAGNOSTIC IMAGING STUDY LIMITATIONS
 Cone Beam Computed Tomography THE OBJECTIVES OF DIAGNOSTIC IMAGING Reveal pathology Reveal the anatomic truth Steven R. Singer, DDS srs2@columbia.edu IDEAL DIAGNOSTIC IMAGING STUDY Provides desired diagnostic
Cone Beam Computed Tomography THE OBJECTIVES OF DIAGNOSTIC IMAGING Reveal pathology Reveal the anatomic truth Steven R. Singer, DDS srs2@columbia.edu IDEAL DIAGNOSTIC IMAGING STUDY Provides desired diagnostic
DOM 3000 Series Dental Microscopes For Dentistry, For you
 See more,treat more Version: DOM3000s MS en 2016/A. Semorr Medical Tech 2016. Printed in China. Pics, Specifications and Technical data subject to change without advance notifications. DOM 3000 Series
See more,treat more Version: DOM3000s MS en 2016/A. Semorr Medical Tech 2016. Printed in China. Pics, Specifications and Technical data subject to change without advance notifications. DOM 3000 Series
A Navigation System for Minimally Invasive Abdominal Intervention Surgery Robot
 A Navigation System for Minimally Invasive Abdominal Intervention Surgery Robot Weiming ZHAI, Yannan ZHAO and Peifa JIA State Key Laboratory of Intelligent Technology and Systems Tsinghua National Laboratory
A Navigation System for Minimally Invasive Abdominal Intervention Surgery Robot Weiming ZHAI, Yannan ZHAO and Peifa JIA State Key Laboratory of Intelligent Technology and Systems Tsinghua National Laboratory
VIEWER. Version 4.0. Software User Guide Revision 1.0. Copyright 2018, Brainlab AG Germany. All rights reserved.
 VIEWER Version 4.0 Software User Guide Revision 1.0 Copyright 2018, Brainlab AG Germany. All rights reserved. TABLE OF CONTENTS TABLE OF CONTENTS 1 GENERAL INFORMATION...5 1.1 Contact Data...5 1.2 Legal
VIEWER Version 4.0 Software User Guide Revision 1.0 Copyright 2018, Brainlab AG Germany. All rights reserved. TABLE OF CONTENTS TABLE OF CONTENTS 1 GENERAL INFORMATION...5 1.1 Contact Data...5 1.2 Legal
Intraoperative Fast 3D Shape Recovery of Abdominal Organs in Laparoscopy
 Intraoperative Fast 3D Shape Recovery of Abdominal Organs in Laparoscopy Mitsuhiro Hayashibe 1, Naoki Suzuki 1, Asaki Hattori 1, and Yoshihiko Nakamura 2 1 Institute for High Dimensional Medical Imaging,
Intraoperative Fast 3D Shape Recovery of Abdominal Organs in Laparoscopy Mitsuhiro Hayashibe 1, Naoki Suzuki 1, Asaki Hattori 1, and Yoshihiko Nakamura 2 1 Institute for High Dimensional Medical Imaging,
XRADIA microxct Manual
 XRADIA microxct Manual Multiscale CT Lab Table of Contents 1. Introduction and Basics 1.1 Instrument Parts 1.2 Powering up the system 1.3 Preparing your sample 2. TXM Controller 2.1 Starting up 2.2 Finding
XRADIA microxct Manual Multiscale CT Lab Table of Contents 1. Introduction and Basics 1.1 Instrument Parts 1.2 Powering up the system 1.3 Preparing your sample 2. TXM Controller 2.1 Starting up 2.2 Finding
Leksell SurgiPlan Overview. Powerful planning for surgical success
 Leksell SurgiPlan Overview Powerful planning for surgical success Making a Difference in Surgical Planning Leksell SurgiPlan Leksell SurgiPlan is an advanced image-based neuro surgical planning software,
Leksell SurgiPlan Overview Powerful planning for surgical success Making a Difference in Surgical Planning Leksell SurgiPlan Leksell SurgiPlan is an advanced image-based neuro surgical planning software,
Lecture 6: Medical imaging and image-guided interventions
 ME 328: Medical Robotics Winter 2019 Lecture 6: Medical imaging and image-guided interventions Allison Okamura Stanford University Updates Assignment 3 Due this Thursday, Jan. 31 Note that this assignment
ME 328: Medical Robotics Winter 2019 Lecture 6: Medical imaging and image-guided interventions Allison Okamura Stanford University Updates Assignment 3 Due this Thursday, Jan. 31 Note that this assignment
Towards Projector-based Visualization for Computer-assisted CABG at the Open Heart
 Towards Projector-based Visualization for Computer-assisted CABG at the Open Heart Christine Hartung 1, Claudia Gnahm 1, Stefan Sailer 1, Marcel Schenderlein 1, Reinhard Friedl 2, Martin Hoffmann 3, Klaus
Towards Projector-based Visualization for Computer-assisted CABG at the Open Heart Christine Hartung 1, Claudia Gnahm 1, Stefan Sailer 1, Marcel Schenderlein 1, Reinhard Friedl 2, Martin Hoffmann 3, Klaus
MR-Mirror: A Complex of Real and Virtual Mirrors
 MR-Mirror: A Complex of Real and Virtual Mirrors Hideaki Sato 1, Itaru Kitahara 1, and Yuichi Ohta 1 1 Department of Intelligent Interaction Technologies, Graduate School of Systems and Information Engineering,
MR-Mirror: A Complex of Real and Virtual Mirrors Hideaki Sato 1, Itaru Kitahara 1, and Yuichi Ohta 1 1 Department of Intelligent Interaction Technologies, Graduate School of Systems and Information Engineering,
DICOM VIEWER. Version 3.2. Software User Guide Revision 1.1. Copyright 2017, Brainlab AG Germany. All rights reserved.
 DICOM VIEWER Version 3.2 Software User Guide Revision 1.1 Copyright 2017, Brainlab AG Germany. All rights reserved. TABLE OF CONTENTS TABLE OF CONTENTS 1 GENERAL INFORMATION...5 1.1 Contact Data...5 1.2
DICOM VIEWER Version 3.2 Software User Guide Revision 1.1 Copyright 2017, Brainlab AG Germany. All rights reserved. TABLE OF CONTENTS TABLE OF CONTENTS 1 GENERAL INFORMATION...5 1.1 Contact Data...5 1.2
Comp 471 / Cart 498: Final Project Proposal
 Pierre-Luc Bertrand Ramzy Hissin Justin Mereb Eric Zaino Comp 471 / Cart 498: Final Project Proposal Work Presented to Dr. Sha Xin Wei Concordia University October 23, 2006 Taste of Reality A Project on
Pierre-Luc Bertrand Ramzy Hissin Justin Mereb Eric Zaino Comp 471 / Cart 498: Final Project Proposal Work Presented to Dr. Sha Xin Wei Concordia University October 23, 2006 Taste of Reality A Project on
CHomework Assignment /655 Fall 2017 (Circle One)
") CHomework Assignment 2 600.455/655 Fall 2017 (Circle One) Instructions and Score Sheet (hand in with answers) Name Email Other contact information (optional) Signature (required) I/We have followed the
CHomework Assignment 2 600.455/655 Fall 2017 (Circle One) Instructions and Score Sheet (hand in with answers) Name Email Other contact information (optional) Signature (required) I/We have followed the
More space, better access: DPMI PRO magis on the S S Floor Stand
 Surgical Microscopes from Carl Zeiss More space, better access: DPMI PRO magis on the S S Floor Stand ZEISS DPMI The is on the S В - for microsurgery Every microsurgical intervention requires a special
Surgical Microscopes from Carl Zeiss More space, better access: DPMI PRO magis on the S S Floor Stand ZEISS DPMI The is on the S В - for microsurgery Every microsurgical intervention requires a special
The team. Disclosures. Ultrasound Guidance During Radiation Delivery: Confronting the Treatment Interference Challenge.
 Ultrasound Guidance During Radiation Delivery: Confronting the Treatment Interference Challenge Dimitre Hristov Radiation Oncology Stanford University The team Renhui Gong 1 Magdalena Bazalova-Carter 1
Ultrasound Guidance During Radiation Delivery: Confronting the Treatment Interference Challenge Dimitre Hristov Radiation Oncology Stanford University The team Renhui Gong 1 Magdalena Bazalova-Carter 1
Anatomy Project. Adi Mesika, Dima Trushin, Ksenia Kaganer [GIP] [234329] [ ]
![Anatomy Project. Adi Mesika, Dima Trushin, Ksenia Kaganer [GIP] [234329] [ ]](/thumbs/90/102664632.jpg "Anatomy Project. Adi Mesika, Dima Trushin, Ksenia Kaganer [GIP] [234329] [ ]") Anatomy Project Adi Mesika, Dima Trushin, Ksenia Kaganer [GIP] [234329] [24.01.17] Project idea We developed a 3D Anatomic learning application. Our application assist you in the learning process by creating
Anatomy Project Adi Mesika, Dima Trushin, Ksenia Kaganer [GIP] [234329] [24.01.17] Project idea We developed a 3D Anatomic learning application. Our application assist you in the learning process by creating
SIGMI. ISL & CGV Joint Research Proposal ~Image Fusion~
 SIGMI ISL & CGV Joint Research Proposal ~Image Fusion~ Introduction Research Diagram What CGV Lab is interested in What ISL is interested in Research Plan Research Diagram Medical Imaging and Application
SIGMI ISL & CGV Joint Research Proposal ~Image Fusion~ Introduction Research Diagram What CGV Lab is interested in What ISL is interested in Research Plan Research Diagram Medical Imaging and Application
Endoscopic Reconstruction with Robust Feature Matching
 Endoscopic Reconstruction with Robust Feature Matching Students: Xiang Xiang Mentors: Dr. Daniel Mirota, Dr. Gregory Hager and Dr. Russell Taylor Abstract Feature matching based 3D reconstruction is a
Endoscopic Reconstruction with Robust Feature Matching Students: Xiang Xiang Mentors: Dr. Daniel Mirota, Dr. Gregory Hager and Dr. Russell Taylor Abstract Feature matching based 3D reconstruction is a
Extract, Analyze, and Report Motion from Video
 Extract, Analyze, and Report Motion from Video Extract ProAnalyst provides motion analysis tools that can be applied to any video or image sequence, regardless of content or acquisition method. With ProAnalyst,
Extract, Analyze, and Report Motion from Video Extract ProAnalyst provides motion analysis tools that can be applied to any video or image sequence, regardless of content or acquisition method. With ProAnalyst,
Suturing in Confined Spaces: Constrained Motion Control of a Hybrid 8-DoF Robot
 Suturing in Confined Spaces: Constrained Motion Control of a Hybrid 8-DoF Robot Ankur Kapoor 1, Nabil Simaan 2, Russell H. Taylor 1 1 ERC-CISST Department of Computer Science Johns Hopkins University 2
Suturing in Confined Spaces: Constrained Motion Control of a Hybrid 8-DoF Robot Ankur Kapoor 1, Nabil Simaan 2, Russell H. Taylor 1 1 ERC-CISST Department of Computer Science Johns Hopkins University 2
Introduction to Medical Image Processing
 Introduction to Medical Image Processing Δ Essential environments of a medical imaging system Subject Image Analysis Energy Imaging System Images Image Processing Feature Images Image processing may be
Introduction to Medical Image Processing Δ Essential environments of a medical imaging system Subject Image Analysis Energy Imaging System Images Image Processing Feature Images Image processing may be
Compact Forceps Manipulator Using Friction Wheel Mechanism and Gimbals Mechanism for Laparoscopic Surgery
 Compact Manipulator Using Friction Wheel Mechanism and Gimbals Mechanism for Laparoscopic Surgery Takashi Suzuki, Youichi Katayama, Etsuko Kobayashi, and Ichiro Sakuma Institute of Environmental Studies,
Compact Manipulator Using Friction Wheel Mechanism and Gimbals Mechanism for Laparoscopic Surgery Takashi Suzuki, Youichi Katayama, Etsuko Kobayashi, and Ichiro Sakuma Institute of Environmental Studies,
fmri/dti analysis using Dynasuite
 fmri/dti analysis using Dynasuite Contents 1 Logging in 2 Finding patient session 3 Viewing and adjusting images 4 Checking brain segmentation 5 Checking image registration 6 Seeing fmri results 7 Saving
fmri/dti analysis using Dynasuite Contents 1 Logging in 2 Finding patient session 3 Viewing and adjusting images 4 Checking brain segmentation 5 Checking image registration 6 Seeing fmri results 7 Saving
Design and Fabrication of a Programmable Stiffness-Sensitive Gripper for Object Handling
 Design and Fabrication of a Programmable Stiffness-Sensitive Gripper for Object Handling Mehdi Modabberifar, Sanaz Jabary, Mojtaba Ghodsi Abstract Stiffness sensing is an important issue in medical diagnostic,
Design and Fabrication of a Programmable Stiffness-Sensitive Gripper for Object Handling Mehdi Modabberifar, Sanaz Jabary, Mojtaba Ghodsi Abstract Stiffness sensing is an important issue in medical diagnostic,
ACHIEVE A NEW PERSPECTIVE
 3D Imaging Solution ACHIEVE A NEW PERSPECTIVE The only HD 3D system with a fully flexible direction of view. 3D from the surgeon s point of view enters the surgical field at last Introducing a new 3D imaging
3D Imaging Solution ACHIEVE A NEW PERSPECTIVE The only HD 3D system with a fully flexible direction of view. 3D from the surgeon s point of view enters the surgical field at last Introducing a new 3D imaging
Advanced Visual Medicine: Techniques for Visual Exploration & Analysis
 Advanced Visual Medicine: Techniques for Visual Exploration & Analysis Interactive Visualization of Multimodal Volume Data for Neurosurgical Planning Felix Ritter, MeVis Research Bremen Multimodal Neurosurgical
Advanced Visual Medicine: Techniques for Visual Exploration & Analysis Interactive Visualization of Multimodal Volume Data for Neurosurgical Planning Felix Ritter, MeVis Research Bremen Multimodal Neurosurgical