Affine Transformations. Transforming shape models Combining affine transformations Scene graphs, interactor trees Hit tests on transformed shapes
|
|
|
- Ami Dawson
- 5 years ago
- Views:
Transcription
1 Affine Transformations Transforming shape models Combining affine transformations Scene graphs, interactor trees Hit tests on transformed shapes



2 Reacll: Shape Models We can think of widgets as shape models Consist of an array of points {P1, P2,, Pn} Properties describing how to draw it e.g. Button Points (0,0), (10,0), (5,0), (10,5) Properties Text: OK Border width: 1 pixel Border color: blue 0,5 10,5 OK 5 0,0 10,0 10 2
3 Recall: Interactor Tree The interactor tree describes the hierarchy of widgets Widget location is always specified in terms of parent s coordinate system (i.e. relative or local coordinates). We need to do some math before painting Performing hit test requires taking parent location into account (i.e. determining which components a given location corresponds to, relative to its parent) In this lecture, we ll show how to use affine transformations with an interactor tree to: Manipulate and transform widgets (shape models). Tell widgets how to draw themselves on-screen, relative to their parent. Determine if a mouse-click intersects one of these widgets in the interactor tree. 3
4 Linear Algebra: Review of Terms (s) Scalar: a single value (usually real number) (v) Vector: directed line segment (represents direction and magnitude) (P) Point: a fixed location in space (represents a position) Legal operations: vector + vector: v1 + v2 = v3 vector multiplied by a scalar: v1 x s1 = v4 point minus point = P1 - P2 = v5 point + vector: P2 + v5 = P1 2 ways to multiply vector by vector dot (inner) product: v1 o v2 = s2 cross (outer) product: v1 x v2 = v6 4

5 Moving Shapes, Multiple Instances Translate by adding offset to shape points What about scaling? Or rotation? transform 5
6 Moving Shapes, Multiple Instances How to create multiple instances of a shape? Rotation + Scaling + Translation transform 6

7 Translation Translate: add a scalar to each of the components tx=2, ty=4 x' = x + tx y' = y + ty 7

8 Uniform Scaling Uniform scale: multiply each component by the same scalar multiply by s = 2 8 x' = x s y' = y s
9 Non-Uniform Scaling Scale: multiply each component by different scalar multiply by sx = 2, sy = 1/2 x' = x sx 9 y' = y sy
10 Rotation Rotate: each component is some function of x, y, Θ rotate by Θ = 30 o Θ 10 x' = f(x,y,θ) y' = f(x,y,θ)
11 Rotation Rotate: each component is some function of x, y, Θ rotate by Θ = 30 o Θ 11 x' = x cos(θ)-y sin(θ) y' = x sin(θ)+y cos(θ)
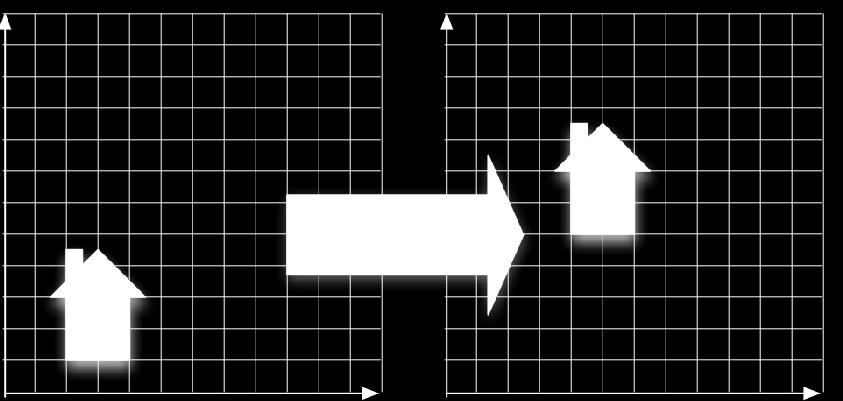
12 Combining Transformations Rotate: x' = x cos(θ)-y sin(θ) y' = x sin(θ)+y cos(θ) Translate: x' = x + tx y' = y + ty Scale: x' = x sx y' = y sy Goal: Paint the house at 2x the size, up the hill. What s our strategy? 12
13 Combining Transformations: (1) Scale Rotate: x' = x cos(θ)-y sin(θ) y' = x sin(θ)+y cos(θ) Translate: x' = x + tx y' = y + ty Scale: x' = x sx y' = y sy Steps 1. Scale x1 = 2x y1 = 2y 13
14 Combining Transformations: (2) Rotate Rotate: x' = x cos(θ)-y sin(θ) y' = x sin(θ)+y cos(θ) Translate: x' = x + tx y' = y + ty Scale: x' = x sx y' = y sy Steps 1. Scale 2. Rotate x2 = 2( x cos(30) - y sin(30) ) y2 = 2( x sin(30) + y cos(30) ) 14
15 Combining Transformations: (3) Translation Rotate: x' = x cos(θ)-y sin(θ) y' = x sin(θ)+y cos(θ) Translate: x' = x + tx y' = y + ty Scale: x' = x sx y' = y sy Steps 1. Scale 2. Rotate 3. Translate x3 = 2( x cos(30) - y sin(30) ) + 8 y3 = 2( x sin(30) + y cos (30) ) + 4 Order of operations is important. What if you translate first? 15


16 Matrix Representation Goal: represent each 2D transformation with a matrix This is a succinct way of expressing a single transformation, that can be used to transform all of the points in our shape model Multiply matrix by column vector <=> apply transformation to point 16


17 Matrix Representation Matrix notation also supports combining transformations by multiplication (i.e. transformations are associative) We can multiply transformation matrices together This single matrix can then be used to transform many points. Can be sent to a GPU to speed the process. 17


18 2 x 2 Matrices Why types of transformations can be represented by a 2x2 matrix? 2D Scale around (0,0)? 18
19 2 x 2 Matrices Why types of transformations can be represented by a 2x2 matrix? 2D Rotate around (0,0)? 19


20 2 x 2 Matrices Why types of transformations can be represented by a 2x2 matrix? 2D Mirror about Y axis? 20


21 2 x 2 Matrices Why types of transformations can be represented by a 2x2 matrix? 2D Translation Maybe this? = 1 / / 1 We can t generalize 2D translation this way; this only works for a specific point! We need a general solution. 21

 [7.")
22 Homogeneous Coordinates Solution: add an extra component (w) to each coordinate [x, y, w] T represents a point at location [x/w, y/w] T convenient coordinate system to represent many useful transformations [3, 2, 1] T [6, 4, 2] T (divide by w to get cartesean coords) [7.5, 5, 2.5] T 22


23 Homogeneous Coordinates The w component is needed to represent translation (we re not working in 3D space, it just looks like it!) extra row w (just set to 1) This gives us an Affine Transformation Matrix that we can use to represent all combined transformations: translation, scaling and rotation a, d: scaling a, b, c, d: rotation tx, ty: translation last row is always (0,0,1) 23
24 Vector and Point Operations This gives us a general representation of a set of transformations, that we can apply to a point or a vector. vector point What we typically use for manipulating shape models.. 24

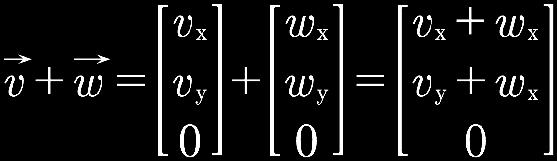
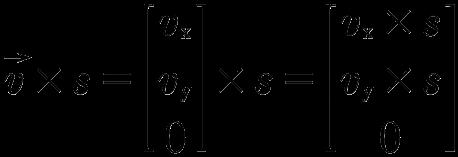

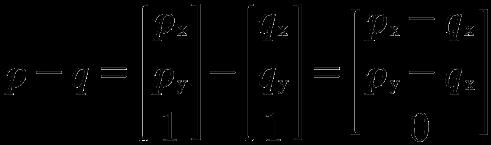
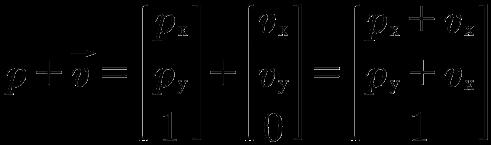
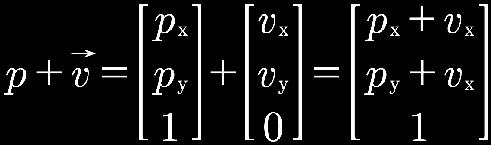
25 Vector and Point Homogeneous Coordinates add vectors subtract points scalar multiply point + vector 25


26 Translating Vectors A vector has no position so translating it shouldn t change anything. 26


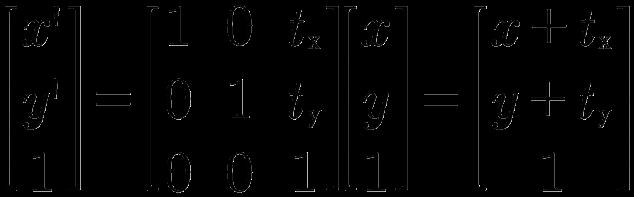

27 Translation Matrix We can represent 2D point translation with a 3x3 matrix 27



28 Translation Matrix: Example 28


29 Rotation Matrix Vectors: Points: 29
30 Rotation Matrix: Example rotate by Θ = 30 o Θ 30


31 Scaling Matrix Vectors: Points: 31
32 Scaling Matrix: Example multiply by sx = 2, sy = 1/2 32


33 Matrix Composition Transformations can be combined by matrix multiplication Translation Rotation Scaling apply transformations to point, from right-to-left 33
 = (AB)C")

 R = R(30 ) S =")
34 Matrix Composition Order Associative: A(BC) = (AB)C Not Commutative: AB BA The order of transformations matters! T = T(100, 0) R = R(30 ) S = S(2, 1.2) 34 TransConDemo.java
 { g2.")
35 Exercise A bar is drawn at (100, 150). Rotate it by 22.5 degrees (π/8 rads) about the left endpoint. private static final int x1 = 100; private static final int y1 = 150; private static final int len = 200; // draw the horizontal bar private void drawbar(graphics2d g2) { g2.drawline(x1, y1, x1+len, y1); g2.filloval(x1-10, y1-10, 20, 20); g2.filloval(x1+len-10, y1-10, 20, 20); } What steps do I need to take to draw the transformed bar? 35 CS D Graphic Transforms
36 Multiplication Order Wrong Way Beginning situation Rotate 22.5 degrees (π/8 rads) Oops, both endpoints moved Could try translating to return a to its original position But by how much? 36 CS D Graphic Transforms

37 Multiplication Order - Correct Way p' = I$ p p' = T( - x1, - y1 ) I$ p p' = R( r / 8) T( - x1, - y1 ) $ p p' = T( x1, y1) R( r/ 8) T( -x1,-y1$ ) p Remember: Scaling and rotation are both about the origin 1. Translate shape to the origin 2. Rotate 3. Translate back to where you want it 37 CS D Graphic Transforms
38 Approach 1: Do it in Java We can mimic this approach in Java Create a shape model, containing points (e.g. line) Create instances of this shape model (e.g. red, green) Use the Java AffineTransform static methods to create transform, scale or rotation matrices reflecting the operations needed. AffineTransform.getRotateInstance AffineTransform.getTranslateInstance AffineTransform.getScaleInstance For each of these operations, use the resulting matrix to transform the points in your model. matrix.transform (p1, p1); ShapeModel1.java 38 CS D Graphic Transforms
39 Approach 2: Do it in Java We can also use the Graphics Context to describe transformations that should be applied to shapes before they are drawn. g2.rotate(r) g2.translate(x,y) g2.scale(s) Notice that in Java, the origin is in the top-left corner of the screen. Previous demos showed standard Cartesean coordinate system In computer graphics, the origin is typically top-left ShapeModel2.java 39 CS D Graphic Transforms
40 Code Review: RotateLine1 (1 of 3) We can draw at fixed locations, or use transformations. RotateLine1 mixes affine transforms and drawing at fixed positions. It s easier if you don t. RotateLine2 is a cleaner implementation that positions the shape model at the origin, and relies on transformations (trsnslations) to position the shapes. Recommendation: draw at the origin and then translate to the position you want!. private static final int x1 = 100; private static final int y1 = 150; private static final int len = 200; // Draw bar at the origin private void drawbar(graphics2d g2) { g2.drawline(0, 0, len, 0); g2.filloval(-15, -15, 30, 30); g2.filloval(len - 15, -15, 30, 30); } 40 CS D Graphic Transforms
41 Code Review: RotateLine2 (2 of 3) /* Draw everything. */ public void paintcomponent(graphics g) { Graphics2D g2 = (Graphics2D) g; g2.setstroke(new BasicStroke(8)); this.drawaxes(g2); } g2.setstroke(new BasicStroke(10)); g2.setcolor(color.red); // Transform WRT previous transformations (none) g2.translate(x1, y1); this.drawbar(g2); // Transform WRT previous transformations g2.rotate(-math.pi/8); g2.setcolor(color.green.darker()); this.drawbar(g2); 41 CS D Graphic Transforms
); g2.setcolor(color.red); g2.translate(x1, y1); this.drawbar(g2); AffineTransform at = g2.gettransform(); g2.rotate(-math.pi/8); g2.setcolor(color.green.darker()); this.")
42 Code Review: RotateLine3 (1 of 3) public void paintcomponent(graphics g) { Graphics2D g2 = (Graphics2D) g; g2.setstroke(new BasicStroke(8)); g2.translate(30, 30); this.drawaxes(g2); } g2.setstroke(new BasicStroke(10)); g2.setcolor(color.red); g2.translate(x1, y1); this.drawbar(g2); AffineTransform at = g2.gettransform(); g2.rotate(-math.pi/8); g2.setcolor(color.green.darker()); this.drawbar(g2); g2.settransform(at); g2.rotate(-math.pi/4); g2.setcolor(color.blue); this.drawbar(g2); T(30, 30) T(x1, y1) R(π/8) R(π/4) 42 CS D Graphic Transforms
43 Scene Graphs 43 CS D Graphic Transforms



44 Scene Graph Mechanism for drawing a series of connected components Each part has a transform matrix Each part draws its children relative to itself 44
45 Affine Transformations + Interactor Tree An interactor tree is a type of scene graph. Each component has an affine transformation matrix, and a paint routine. Matrix describes the components location relative to its parent (i.e. what translations should be performed on it) The paint routine concatenates the parents affine transformation matrix with the components matrix and then paints using the resulting matrix. e.g. M1: translate (10,10) M2: translate (5,5) M1 M2 x 45
46 Affine Transformations + Interactor Tree As we navigate the interactor tree, we combine successive matrices to reflect the way that each component is positioned relative to it s parent. Each component should: 1. paint itself (using it s affine transformation matrix) 2. for each child save the current affine transform calculate a new transform matrix using the current transform matrix and the location of the child (i.e. current * child s translation transformation) tell child to paint themselves using the new affine transform matrix return the original affine transform matrix 46
47 Useful Graphics2D methods AffineTransform gettransform(), void settransform(affinetransform Tx) Returns/sets a copy of the current Transform in the Graphics2D context. void rotate(double theta), void rotate(double theta, double x, double y) Concatenates the current Graphics2D Transform with a rotation transform. Second variant translates origin to (x,y), rotates, and translates origin (-x, -y). void scale(double sx, double sy) Concatenates the current Graphics2D Transform with a scaling transformation. Subsequent rendering is resized according to the specified scaling factors relative to the previous scaling. void translate(double tx, double ty) Concatenates the current Graphics2D Transform with a translation transform. 47 CS D Graphic Transforms
48 Java2D AffineTransform Class AffineTransform handles all matrix manipulations A bit more control than Graphics2D Static Methods static AffineTransform getrotateinstance(double theta) static AffineTransform getrotateinstance(double theta, double anchorx, double anchory) static AffineTransform getscaleinstance( double sx, double sy) static AffineTransform gettranslateinstance( double tx, double ty) 48 CS D Graphic Transforms
49 Java2D AffineTransform Class Concatenation methods void rotate(double theta), void rotate(double theta, double anchorx, double anchory) void scale(double sx, double sy) void translate(double tx, double ty) void concatenate(affinetransform Tx) Other Methods AffineTransform createinverse() void transform(point2d[ ] ptsrc, int srcoff, Point2D[ ] ptdst, int dstoff, int numpts) * 49 CS D Graphic Transforms


50 Example: Rotate Triangle We can develop the transformations to animate a triangle (drawn at the origin) in a circle in two different ways: RotateTriangle.java 50
51 Benefits of Geometric Manipulations Allow reuse of objects in scenes Can create multiple instances by translating model of object and re-rendering Allows specification of object in its own coordinate system Don t need to define object in terms of its screen location or orientation Simplifies remapping of models after a change e.g. animation 51 CS D Graphic Transforms
52 Inside Tests 52 CS D Graphic Transforms
53 Affine Transformations + Interactor Tree We also need to transform any coordinates in events as the events are passed down the interactor tree. This allows us to translate between global and local (or relative) coordinate systems. For example, a mouse event in the window s coordinates will need its coordinates translated to a child component s local (relative) location prior to passing it down. Affine transforms can be used for this, too. 53

54 Inside / Hit Tests with Transformed Shapes Mouse and shape model must use the same coordinate system Two options: 1. Transform mouse to model coordinates, or 2. Transform model to mouse coordinates 54
55 Option 1: Transform Mouse to Model Coordinates Only one transformation Selection: Within 3 pixels of a line in screen coordinates is how far in model coordinates? Uniform scaling Maintaining the inverse 55
56 Option 2: Transform Model to Mouse Coordinates Many transformations Manipulations (e.g. dragging) must be transformed back into model coordinates Not recommended 56
Graphics Transformations
 Graphics Transformations Translate, Scale, Rotate Homogeneous Coordinates Affine Transformation Matrices Combining Transformations Shape Model Class 2.7 Graphics Transformations 1 Positioning Shapes Translate
Graphics Transformations Translate, Scale, Rotate Homogeneous Coordinates Affine Transformation Matrices Combining Transformations Shape Model Class 2.7 Graphics Transformations 1 Positioning Shapes Translate
Affine Transformation. Edith Law & Mike Terry
 Affine Transformation Edith Law & Mike Terry Graphic Models vs. Images Computer Graphics: the creation, storage and manipulation of images and their models Model: a mathematical representation of an image
Affine Transformation Edith Law & Mike Terry Graphic Models vs. Images Computer Graphics: the creation, storage and manipulation of images and their models Model: a mathematical representation of an image
Java 2D Graphics. Drawing Primitives, Affine Transformations, Scene Graphs, Hit Tests. Drawing Primitives 2/9/2014. Using it is simple.
 Java 2D Graphics Drawing Primitives, Affine Transformations, Scene Graphs, Hit Tests Drawing Primitives Graphics - Abstract Base Class that supports basic drawing and rendering - Conceptually sim. to WatGUI
Java 2D Graphics Drawing Primitives, Affine Transformations, Scene Graphs, Hit Tests Drawing Primitives Graphics - Abstract Base Class that supports basic drawing and rendering - Conceptually sim. to WatGUI
Graphics Hit-testing. Shape Models Selecting Lines and Shapes. 2.7 Graphics Hit-testing 1
 Graphics Hit-testing Shape Models Selecting Lines and Shapes 2.7 Graphics Hit-testing 1 Recap - Graphic Models and Images Computer Graphics is the creation, storage, and manipulation of images and their
Graphics Hit-testing Shape Models Selecting Lines and Shapes 2.7 Graphics Hit-testing 1 Recap - Graphic Models and Images Computer Graphics is the creation, storage, and manipulation of images and their
2D/3D Geometric Transformations and Scene Graphs
 2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
GEOMETRIC TRANSFORMATIONS AND VIEWING
 GEOMETRIC TRANSFORMATIONS AND VIEWING 2D and 3D 1/44 2D TRANSFORMATIONS HOMOGENIZED Transformation Scaling Rotation Translation Matrix s x s y cosθ sinθ sinθ cosθ 1 dx 1 dy These 3 transformations are
GEOMETRIC TRANSFORMATIONS AND VIEWING 2D and 3D 1/44 2D TRANSFORMATIONS HOMOGENIZED Transformation Scaling Rotation Translation Matrix s x s y cosθ sinθ sinθ cosθ 1 dx 1 dy These 3 transformations are
Computer Science 336 Fall 2017 Homework 2
 Computer Science 336 Fall 2017 Homework 2 Use the following notation as pseudocode for standard 3D affine transformation matrices. You can refer to these by the names below. There is no need to write out
Computer Science 336 Fall 2017 Homework 2 Use the following notation as pseudocode for standard 3D affine transformation matrices. You can refer to these by the names below. There is no need to write out
Math background. 2D Geometric Transformations. Implicit representations. Explicit representations. Read: CS 4620 Lecture 6
 Math background 2D Geometric Transformations CS 4620 Lecture 6 Read: Chapter 2: Miscellaneous Math Chapter 5: Linear Algebra Notation for sets, functions, mappings Linear transformations Matrices Matrix-vector
Math background 2D Geometric Transformations CS 4620 Lecture 6 Read: Chapter 2: Miscellaneous Math Chapter 5: Linear Algebra Notation for sets, functions, mappings Linear transformations Matrices Matrix-vector
Vector Algebra Transformations. Lecture 4
 Vector Algebra Transformations Lecture 4 Cornell CS4620 Fall 2008 Lecture 4 2008 Steve Marschner 1 Geometry A part of mathematics concerned with questions of size, shape, and relative positions of figures
Vector Algebra Transformations Lecture 4 Cornell CS4620 Fall 2008 Lecture 4 2008 Steve Marschner 1 Geometry A part of mathematics concerned with questions of size, shape, and relative positions of figures
2D Graphics. Shape Models, Drawing, Selection. CS d Graphics 1
 2D Graphics Shape Models, Drawing, Selection 1 Graphic Models vs. Images Computer Graphics: the creation, storage, and manipulation of images and their models Model: a mathematical representation of an
2D Graphics Shape Models, Drawing, Selection 1 Graphic Models vs. Images Computer Graphics: the creation, storage, and manipulation of images and their models Model: a mathematical representation of an
Graphics and Interaction Transformation geometry and homogeneous coordinates
 433-324 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
433-324 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates
 COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
2D transformations: An introduction to the maths behind computer graphics
 2D transformations: An introduction to the maths behind computer graphics Lecturer: Dr Dan Cornford d.cornford@aston.ac.uk http://wiki.aston.ac.uk/dancornford CS2150, Computer Graphics, Aston University,
2D transformations: An introduction to the maths behind computer graphics Lecturer: Dr Dan Cornford d.cornford@aston.ac.uk http://wiki.aston.ac.uk/dancornford CS2150, Computer Graphics, Aston University,
2D and 3D Transformations AUI Course Denbigh Starkey
 2D and 3D Transformations AUI Course Denbigh Starkey. Introduction 2 2. 2D transformations using Cartesian coordinates 3 2. Translation 3 2.2 Rotation 4 2.3 Scaling 6 3. Introduction to homogeneous coordinates
2D and 3D Transformations AUI Course Denbigh Starkey. Introduction 2 2. 2D transformations using Cartesian coordinates 3 2. Translation 3 2.2 Rotation 4 2.3 Scaling 6 3. Introduction to homogeneous coordinates
UNIT 2 2D TRANSFORMATIONS
 UNIT 2 2D TRANSFORMATIONS Introduction With the procedures for displaying output primitives and their attributes, we can create variety of pictures and graphs. In many applications, there is also a need
UNIT 2 2D TRANSFORMATIONS Introduction With the procedures for displaying output primitives and their attributes, we can create variety of pictures and graphs. In many applications, there is also a need
Lecture 5 2D Transformation
 Lecture 5 2D Transformation What is a transformation? In computer graphics an object can be transformed according to position, orientation and size. Exactly what it says - an operation that transforms
Lecture 5 2D Transformation What is a transformation? In computer graphics an object can be transformed according to position, orientation and size. Exactly what it says - an operation that transforms
Geometric Transformations
 Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
3D Mathematics. Co-ordinate systems, 3D primitives and affine transformations
 3D Mathematics Co-ordinate systems, 3D primitives and affine transformations Coordinate Systems 2 3 Primitive Types and Topologies Primitives Primitive Types and Topologies 4 A primitive is the most basic
3D Mathematics Co-ordinate systems, 3D primitives and affine transformations Coordinate Systems 2 3 Primitive Types and Topologies Primitives Primitive Types and Topologies 4 A primitive is the most basic
CS 4204 Computer Graphics
 CS 424 Computer Graphics 2D Transformations Yong Cao Virginia Tech References: Introduction to Computer Graphics course notes by Doug Bowman Interactive Computer Graphics, Fourth Edition, Ed Angle Transformations
CS 424 Computer Graphics 2D Transformations Yong Cao Virginia Tech References: Introduction to Computer Graphics course notes by Doug Bowman Interactive Computer Graphics, Fourth Edition, Ed Angle Transformations
2D TRANSFORMATIONS AND MATRICES
 2D TRANSFORMATIONS AND MATRICES Representation of Points: 2 x 1 matrix: x y General Problem: B = T A T represents a generic operator to be applied to the points in A. T is the geometric transformation
2D TRANSFORMATIONS AND MATRICES Representation of Points: 2 x 1 matrix: x y General Problem: B = T A T represents a generic operator to be applied to the points in A. T is the geometric transformation
Core Graphics and OpenGL ES. Dr. Sarah Abraham
 Core Graphics and OpenGL ES Dr. Sarah Abraham University of Texas at Austin CS329e Fall 2018 Core Graphics Apple s vector-drawing framework Previously known as Quartz or Quartz2D Includes handling for:
Core Graphics and OpenGL ES Dr. Sarah Abraham University of Texas at Austin CS329e Fall 2018 Core Graphics Apple s vector-drawing framework Previously known as Quartz or Quartz2D Includes handling for:
2D Image Transforms Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") 2D Image Transforms 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Extract features from an image what do we do next? Feature matching (object recognition, 3D reconstruction, augmented
2D Image Transforms 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Extract features from an image what do we do next? Feature matching (object recognition, 3D reconstruction, augmented
UNIT 2. Translation/ Scaling/ Rotation. Unit-02/Lecture-01
 UNIT 2 Translation/ Scaling/ Rotation Unit-02/Lecture-01 Translation- (RGPV-2009,10,11,13,14) Translation is to move, or parallel shift, a figure. We use a simple point as a starting point. This is a simple
UNIT 2 Translation/ Scaling/ Rotation Unit-02/Lecture-01 Translation- (RGPV-2009,10,11,13,14) Translation is to move, or parallel shift, a figure. We use a simple point as a starting point. This is a simple
Lecture 4: Transforms. Computer Graphics CMU /15-662, Fall 2016
 Lecture 4: Transforms Computer Graphics CMU 15-462/15-662, Fall 2016 Brief recap from last class How to draw a triangle - Why focus on triangles, and not quads, pentagons, etc? - What was specific to triangles
Lecture 4: Transforms Computer Graphics CMU 15-462/15-662, Fall 2016 Brief recap from last class How to draw a triangle - Why focus on triangles, and not quads, pentagons, etc? - What was specific to triangles
Graphics Pipeline 2D Geometric Transformations
 Graphics Pipeline 2D Geometric Transformations CS 4620 Lecture 8 1 Plane projection in drawing Albrecht Dürer 2 Plane projection in drawing source unknown 3 Rasterizing triangles Summary 1 evaluation of
Graphics Pipeline 2D Geometric Transformations CS 4620 Lecture 8 1 Plane projection in drawing Albrecht Dürer 2 Plane projection in drawing source unknown 3 Rasterizing triangles Summary 1 evaluation of
Linear and Affine Transformations Coordinate Systems
 Linear and Affine Transformations Coordinate Systems Recall A transformation T is linear if Recall A transformation T is linear if Every linear transformation can be represented as matrix Linear Transformation
Linear and Affine Transformations Coordinate Systems Recall A transformation T is linear if Recall A transformation T is linear if Every linear transformation can be represented as matrix Linear Transformation
Game Engineering: 2D
 Game Engineering: 2D CS420-2010F-07 Objects in 2D David Galles Department of Computer Science University of San Francisco 07-0: Representing Polygons We want to represent a simple polygon Triangle, rectangle,
Game Engineering: 2D CS420-2010F-07 Objects in 2D David Galles Department of Computer Science University of San Francisco 07-0: Representing Polygons We want to represent a simple polygon Triangle, rectangle,
3D Transformation. In 3D, we have x, y, and z. We will continue use column vectors:. Homogenous systems:. x y z. x y z. glvertex3f(x, y,z);
;") 3D Transformation In 3D, we have x, y, and z. We will continue use column vectors:. Homogenous systems:. 3D Transformation glvertex3f(x, y,z); x y z x y z A Right Handle Coordinate System x y z; y z x;
3D Transformation In 3D, we have x, y, and z. We will continue use column vectors:. Homogenous systems:. 3D Transformation glvertex3f(x, y,z); x y z x y z A Right Handle Coordinate System x y z; y z x;
Modeling Transformations
 Modeling Transformations Connelly Barnes CS 4810: Graphics Acknowledgment: slides by Connelly Barnes, Misha Kazhdan, Allison Klein, Tom Funkhouser, Adam Finkelstein and David Dobkin Modeling Transformations
Modeling Transformations Connelly Barnes CS 4810: Graphics Acknowledgment: slides by Connelly Barnes, Misha Kazhdan, Allison Klein, Tom Funkhouser, Adam Finkelstein and David Dobkin Modeling Transformations
Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ x + 5y + 7z 9x + 3y + 11z
 Basic Linear Algebra Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ 1 5 ] 7 9 3 11 Often matrices are used to describe in a simpler way a series of linear equations.
Basic Linear Algebra Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ 1 5 ] 7 9 3 11 Often matrices are used to describe in a simpler way a series of linear equations.
CV: 3D sensing and calibration
 CV: 3D sensing and calibration Coordinate system changes; perspective transformation; Stereo and structured light MSU CSE 803 1 roadmap using multiple cameras using structured light projector 3D transformations
CV: 3D sensing and calibration Coordinate system changes; perspective transformation; Stereo and structured light MSU CSE 803 1 roadmap using multiple cameras using structured light projector 3D transformations
the gamedesigninitiative at cornell university Lecture 14 2D Sprite Graphics
 Lecture 14 Drawing Images Graphics Lectures SpriteBatch interface Coordinates and Transforms Drawing Perspective Camera Projections Drawing Primitives Color and Textures Polygons 2 Drawing Images Graphics
Lecture 14 Drawing Images Graphics Lectures SpriteBatch interface Coordinates and Transforms Drawing Perspective Camera Projections Drawing Primitives Color and Textures Polygons 2 Drawing Images Graphics
Overview. By end of the week:
 Overview By end of the week: - Know the basics of git - Make sure we can all compile and run a C++/ OpenGL program - Understand the OpenGL rendering pipeline - Understand how matrices are used for geometric
Overview By end of the week: - Know the basics of git - Make sure we can all compile and run a C++/ OpenGL program - Understand the OpenGL rendering pipeline - Understand how matrices are used for geometric
Therefore, after becoming familiar with the Matrix Method, you will be able to solve a system of two linear equations in four different ways.
 Grade 9 IGCSE A1: Chapter 9 Matrices and Transformations Materials Needed: Straightedge, Graph Paper Exercise 1: Matrix Operations Matrices are used in Linear Algebra to solve systems of linear equations.
Grade 9 IGCSE A1: Chapter 9 Matrices and Transformations Materials Needed: Straightedge, Graph Paper Exercise 1: Matrix Operations Matrices are used in Linear Algebra to solve systems of linear equations.
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
Transformations. Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico
 Transformations Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico Angel: Interactive Computer Graphics 4E Addison-Wesley 25 1 Objectives
Transformations Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico Angel: Interactive Computer Graphics 4E Addison-Wesley 25 1 Objectives
1 Affine and Projective Coordinate Notation
 CS348a: Computer Graphics Handout #9 Geometric Modeling Original Handout #9 Stanford University Tuesday, 3 November 992 Original Lecture #2: 6 October 992 Topics: Coordinates and Transformations Scribe:
CS348a: Computer Graphics Handout #9 Geometric Modeling Original Handout #9 Stanford University Tuesday, 3 November 992 Original Lecture #2: 6 October 992 Topics: Coordinates and Transformations Scribe:
Basics of Computational Geometry
 Basics of Computational Geometry Nadeem Mohsin October 12, 2013 1 Contents This handout covers the basic concepts of computational geometry. Rather than exhaustively covering all the algorithms, it deals
Basics of Computational Geometry Nadeem Mohsin October 12, 2013 1 Contents This handout covers the basic concepts of computational geometry. Rather than exhaustively covering all the algorithms, it deals
Computer Graphics Geometric Transformations
 Computer Graphics 2016 6. Geometric Transformations Hongxin Zhang State Key Lab of CAD&CG, Zhejiang University 2016-10-31 Contents Transformations Homogeneous Co-ordinates Matrix Representations of Transformations
Computer Graphics 2016 6. Geometric Transformations Hongxin Zhang State Key Lab of CAD&CG, Zhejiang University 2016-10-31 Contents Transformations Homogeneous Co-ordinates Matrix Representations of Transformations
Homework #1. Displays, Image Processing, Affine Transformations, Hierarchical Modeling
 Computer Graphics Instructor: Brian Curless CSE 457 Spring 217 Homework #1 Displays, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Friday, April 7 th Due: Thursday, April 2
Computer Graphics Instructor: Brian Curless CSE 457 Spring 217 Homework #1 Displays, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Friday, April 7 th Due: Thursday, April 2
Today. Parity. General Polygons? Non-Zero Winding Rule. Winding Numbers. CS559 Lecture 11 Polygons, Transformations
 CS559 Lecture Polygons, Transformations These are course notes (not used as slides) Written by Mike Gleicher, Oct. 005 With some slides adapted from the notes of Stephen Chenney Final version (after class)
CS559 Lecture Polygons, Transformations These are course notes (not used as slides) Written by Mike Gleicher, Oct. 005 With some slides adapted from the notes of Stephen Chenney Final version (after class)
Computer Graphics 7: Viewing in 3-D
 Computer Graphics 7: Viewing in 3-D In today s lecture we are going to have a look at: Transformations in 3-D How do transformations in 3-D work? Contents 3-D homogeneous coordinates and matrix based transformations
Computer Graphics 7: Viewing in 3-D In today s lecture we are going to have a look at: Transformations in 3-D How do transformations in 3-D work? Contents 3-D homogeneous coordinates and matrix based transformations
CS 184, Fall 1992 MT Solutions Professor Brian A. Barsky
 CS 184, Fall 1992 MT Solutions Professor Brian A. Barsky Problem #1 A) There are two ways to solve this problem - the easy way and the hard way. Let's solve it the easy way first. Think o a b c T= d e
CS 184, Fall 1992 MT Solutions Professor Brian A. Barsky Problem #1 A) There are two ways to solve this problem - the easy way and the hard way. Let's solve it the easy way first. Think o a b c T= d e
COMP 175 COMPUTER GRAPHICS. Ray Casting. COMP 175: Computer Graphics April 26, Erik Anderson 09 Ray Casting
 Ray Casting COMP 175: Computer Graphics April 26, 2018 1/41 Admin } Assignment 4 posted } Picking new partners today for rest of the assignments } Demo in the works } Mac demo may require a new dylib I
Ray Casting COMP 175: Computer Graphics April 26, 2018 1/41 Admin } Assignment 4 posted } Picking new partners today for rest of the assignments } Demo in the works } Mac demo may require a new dylib I
2D Graphics. Shape Models, Drawing, Selection. CS d Graphics 1
 2D Graphics Shape Models, Drawing, Selection 1 Graphic Models vs. Images Computer Graphics: the creation, storage, and manipulation of images and their models Model: a mathematical representation of an
2D Graphics Shape Models, Drawing, Selection 1 Graphic Models vs. Images Computer Graphics: the creation, storage, and manipulation of images and their models Model: a mathematical representation of an
Last week. Machiraju/Zhang/Möller/Fuhrmann
 Last week Machiraju/Zhang/Möller/Fuhrmann 1 Geometry basics Scalar, point, and vector Vector space and affine space Basic point and vector operations Sided-ness test Lines, planes, and triangles Linear
Last week Machiraju/Zhang/Möller/Fuhrmann 1 Geometry basics Scalar, point, and vector Vector space and affine space Basic point and vector operations Sided-ness test Lines, planes, and triangles Linear
Lecture 11: Output 2. Fall UI Design and Implementation 1
 Lecture 11: Output 2 Fall 2006 6.831 UI Design and Implementation 1 1 UI Hall of Fame or Shame? Fall 2006 6.831 UI Design and Implementation 2 Here s our hall of fame example. StatCounter is a web site
Lecture 11: Output 2 Fall 2006 6.831 UI Design and Implementation 1 1 UI Hall of Fame or Shame? Fall 2006 6.831 UI Design and Implementation 2 Here s our hall of fame example. StatCounter is a web site
CT5510: Computer Graphics. Transformation BOCHANG MOON
 CT5510: Computer Graphics Transformation BOCHANG MOON 2D Translation Transformations such as rotation and scale can be represented using a matrix M.., How about translation? No way to express this using
CT5510: Computer Graphics Transformation BOCHANG MOON 2D Translation Transformations such as rotation and scale can be represented using a matrix M.., How about translation? No way to express this using
Computer Graphics. Chapter 5 Geometric Transformations. Somsak Walairacht, Computer Engineering, KMITL
 Chapter 5 Geometric Transformations Somsak Walairacht, Computer Engineering, KMITL 1 Outline Basic Two-Dimensional Geometric Transformations Matrix Representations and Homogeneous Coordinates Inverse Transformations
Chapter 5 Geometric Transformations Somsak Walairacht, Computer Engineering, KMITL 1 Outline Basic Two-Dimensional Geometric Transformations Matrix Representations and Homogeneous Coordinates Inverse Transformations
CS770/870 Spring 2017 Transformations
 CS770/870 Spring 2017 Transformations Coordinate sstems 2D Transformations Homogeneous coordinates Matrices, vectors, points 01/29/2017 1 Coordinate Sstems Coordinate sstems used in graphics Screen coordinates:
CS770/870 Spring 2017 Transformations Coordinate sstems 2D Transformations Homogeneous coordinates Matrices, vectors, points 01/29/2017 1 Coordinate Sstems Coordinate sstems used in graphics Screen coordinates:
Polar Coordinates. 2, π and ( )
") Polar Coordinates Up to this point we ve dealt exclusively with the Cartesian (or Rectangular, or x-y) coordinate system. However, as we will see, this is not always the easiest coordinate system to work
Polar Coordinates Up to this point we ve dealt exclusively with the Cartesian (or Rectangular, or x-y) coordinate system. However, as we will see, this is not always the easiest coordinate system to work
Warping. 12 May 2015
 Warping 12 May 2015 Warping, morphing, mosaic Slides from Durand and Freeman (MIT), Efros (CMU, Berkeley), Szeliski (MSR), Seitz (UW), Lowe (UBC) http://szeliski.org/book/ 2 Image Warping Image filtering:
Warping 12 May 2015 Warping, morphing, mosaic Slides from Durand and Freeman (MIT), Efros (CMU, Berkeley), Szeliski (MSR), Seitz (UW), Lowe (UBC) http://szeliski.org/book/ 2 Image Warping Image filtering:
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES
 CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
Introduction to Homogeneous coordinates
 Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
CS 465 Program 4: Modeller
 CS 465 Program 4: Modeller out: 30 October 2004 due: 16 November 2004 1 Introduction In this assignment you will work on a simple 3D modelling system that uses simple primitives and curved surfaces organized
CS 465 Program 4: Modeller out: 30 October 2004 due: 16 November 2004 1 Introduction In this assignment you will work on a simple 3D modelling system that uses simple primitives and curved surfaces organized
Computer Graphics: Geometric Transformations
 Computer Graphics: Geometric Transformations Geometric 2D transformations By: A. H. Abdul Hafez Abdul.hafez@hku.edu.tr, 1 Outlines 1. Basic 2D transformations 2. Matrix Representation of 2D transformations
Computer Graphics: Geometric Transformations Geometric 2D transformations By: A. H. Abdul Hafez Abdul.hafez@hku.edu.tr, 1 Outlines 1. Basic 2D transformations 2. Matrix Representation of 2D transformations
COMP3421. Week 2 - Transformations in 2D and Vector Geometry Revision
 COMP3421 Week 2 - Transformations in 2D and Vector Geometry Revision Exercise 1. Write code to draw (an approximation) of the surface of a circle at centre 0,0 with radius 1 using triangle fans. 2. At
COMP3421 Week 2 - Transformations in 2D and Vector Geometry Revision Exercise 1. Write code to draw (an approximation) of the surface of a circle at centre 0,0 with radius 1 using triangle fans. 2. At
CS475/675: Computer Graphics End-Semester Examination (Solutions), Fall 2016
, Fall 2016") CS475/675: Computer Graphics End-Semester Examination (Solutions), Fall 2016 This paper has 6 (six) pages and 10 (ten) questions, totalling 80 (eighty) points. No calculators, notes, books, phones, tablets,
CS475/675: Computer Graphics End-Semester Examination (Solutions), Fall 2016 This paper has 6 (six) pages and 10 (ten) questions, totalling 80 (eighty) points. No calculators, notes, books, phones, tablets,
Computer Graphics: Viewing in 3-D. Course Website:
 Computer Graphics: Viewing in 3-D Course Website: http://www.comp.dit.ie/bmacnamee 2 Contents Transformations in 3-D How do transformations in 3-D work? 3-D homogeneous coordinates and matrix based transformations
Computer Graphics: Viewing in 3-D Course Website: http://www.comp.dit.ie/bmacnamee 2 Contents Transformations in 3-D How do transformations in 3-D work? 3-D homogeneous coordinates and matrix based transformations
Object Representation Affine Transforms. Polygonal Representation. Polygonal Representation. Polygonal Representation of Objects
 Object Representation Affine Transforms Polygonal Representation of Objects Although perceivable the simplest form of representation they can also be the most problematic. To represent an object polygonally,
Object Representation Affine Transforms Polygonal Representation of Objects Although perceivable the simplest form of representation they can also be the most problematic. To represent an object polygonally,
Coordinate Spaces & Transformations. in InDesign CS4 CC Chapter 1
 Coordinate Spaces & Transformations in InDesign CS4 CC Chapter 1 S C R I P T I N G S E C R E T S 02 Dealing with coordinate spaces and transformation matrices is one of the most obscure and underappreciated
Coordinate Spaces & Transformations in InDesign CS4 CC Chapter 1 S C R I P T I N G S E C R E T S 02 Dealing with coordinate spaces and transformation matrices is one of the most obscure and underappreciated
Math 7 Elementary Linear Algebra PLOTS and ROTATIONS
 Spring 2007 PLOTTING LINE SEGMENTS Math 7 Elementary Linear Algebra PLOTS and ROTATIONS Example 1: Suppose you wish to use MatLab to plot a line segment connecting two points in the xy-plane. Recall that
Spring 2007 PLOTTING LINE SEGMENTS Math 7 Elementary Linear Algebra PLOTS and ROTATIONS Example 1: Suppose you wish to use MatLab to plot a line segment connecting two points in the xy-plane. Recall that
Linear transformations Affine transformations Transformations in 3D. Graphics 2009/2010, period 1. Lecture 5: linear and affine transformations
 Graphics 2009/2010, period 1 Lecture 5 Linear and affine transformations Vector transformation: basic idea Definition Examples Finding matrices Compositions of transformations Transposing normal vectors
Graphics 2009/2010, period 1 Lecture 5 Linear and affine transformations Vector transformation: basic idea Definition Examples Finding matrices Compositions of transformations Transposing normal vectors
Software Engineering. ò Look up Design Patterns. ò Code Refactoring. ò Code Documentation? ò One of the lessons to learn for good design:
 Software Engineering ò Look up Design Patterns ò Code Refactoring ò Code Documentation? ò One of the lessons to learn for good design: ò Coupling: the amount of interconnectedness between classes ò Cohesion:
Software Engineering ò Look up Design Patterns ò Code Refactoring ò Code Documentation? ò One of the lessons to learn for good design: ò Coupling: the amount of interconnectedness between classes ò Cohesion:
Today. Today. Introduction. Matrices. Matrices. Computergrafik. Transformations & matrices Introduction Matrices
 Computergrafik Matthias Zwicker Universität Bern Herbst 2008 Today Transformations & matrices Introduction Matrices Homogeneous Affine transformations Concatenating transformations Change of Common coordinate
Computergrafik Matthias Zwicker Universität Bern Herbst 2008 Today Transformations & matrices Introduction Matrices Homogeneous Affine transformations Concatenating transformations Change of Common coordinate
MAT 343 Laboratory 4 Plotting and computer animation in MATLAB
 MAT 4 Laboratory 4 Plotting and computer animation in MATLAB In this laboratory session we will learn how to. Plot in MATLAB. The geometric properties of special types of matrices (rotations, dilations,
MAT 4 Laboratory 4 Plotting and computer animation in MATLAB In this laboratory session we will learn how to. Plot in MATLAB. The geometric properties of special types of matrices (rotations, dilations,
COMP3421. Week 2 - Transformations in 2D and Vector Geometry Revision
 COMP3421 Week 2 - Transformations in 2D and Vector Geometry Revision Exercise 1. Write code to draw (an approximation) of the surface of a circle at centre 0,0 with radius 1 using triangle fans. Transformation
COMP3421 Week 2 - Transformations in 2D and Vector Geometry Revision Exercise 1. Write code to draw (an approximation) of the surface of a circle at centre 0,0 with radius 1 using triangle fans. Transformation
GRAFIKA KOMPUTER. ~ M. Ali Fauzi
 GRAFIKA KOMPUTER ~ M. Ali Fauzi Drawing 2D Graphics VIEWPORT TRANSFORMATION Recall :Coordinate System glutreshapefunc(reshape); void reshape(int w, int h) { glviewport(0,0,(glsizei) w, (GLsizei) h); glmatrixmode(gl_projection);
GRAFIKA KOMPUTER ~ M. Ali Fauzi Drawing 2D Graphics VIEWPORT TRANSFORMATION Recall :Coordinate System glutreshapefunc(reshape); void reshape(int w, int h) { glviewport(0,0,(glsizei) w, (GLsizei) h); glmatrixmode(gl_projection);
Transformations Computer Graphics I Lecture 4
 15-462 Computer Graphics I Lecture 4 Transformations Vector Spaces Affine and Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices January 23, 2003 [Angel, Ch. 4] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 4 Transformations Vector Spaces Affine and Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices January 23, 2003 [Angel, Ch. 4] Frank Pfenning Carnegie
CMSC427: Computer Graphics Lecture Notes Last update: November 21, 2014
 CMSC427: Computer Graphics Lecture Notes Last update: November 21, 2014 TA: Josh Bradley 1 Linear Algebra Review 1.1 Vector Multiplication Suppose we have a vector a = [ x a y a ] T z a. Then for some
CMSC427: Computer Graphics Lecture Notes Last update: November 21, 2014 TA: Josh Bradley 1 Linear Algebra Review 1.1 Vector Multiplication Suppose we have a vector a = [ x a y a ] T z a. Then for some
Letterkenny Institute of Technology
 Letterkenny Institute of Technology BSc in Computing(Games) Subject: Games Programming 1 Stage: 1 Date: Autumn 2007 Examiners: J.G. Campbell Dr. M.D.J. McNeill Time Allowed: Two hours. INSTRUCTIONS Answer
Letterkenny Institute of Technology BSc in Computing(Games) Subject: Games Programming 1 Stage: 1 Date: Autumn 2007 Examiners: J.G. Campbell Dr. M.D.J. McNeill Time Allowed: Two hours. INSTRUCTIONS Answer
Transforms 1 Christian Miller CS Fall 2011
 Transforms 1 Christian Miller CS 354 - Fall 2011 Transformations What happens if you multiply a square matrix and a vector together? You get a different vector with the same number of coordinates These
Transforms 1 Christian Miller CS 354 - Fall 2011 Transformations What happens if you multiply a square matrix and a vector together? You get a different vector with the same number of coordinates These
EECE 478. Learning Objectives. Learning Objectives. Linear Algebra and 3D Geometry. Linear algebra in 3D. Coordinate systems
 EECE 478 Linear Algebra and 3D Geometry Learning Objectives Linear algebra in 3D Define scalars, points, vectors, lines, planes Manipulate to test geometric properties Coordinate systems Use homogeneous
EECE 478 Linear Algebra and 3D Geometry Learning Objectives Linear algebra in 3D Define scalars, points, vectors, lines, planes Manipulate to test geometric properties Coordinate systems Use homogeneous
Homework #1. Displays, Image Processing, Affine Transformations, Hierarchical modeling, Projections
 Computer Graphics Instructor: rian Curless CSEP 557 Winter 213 Homework #1 Displays, Image Processing, Affine Transformations, Hierarchical modeling, Projections Assigned: Tuesday, January 22 nd Due: Tuesday,
Computer Graphics Instructor: rian Curless CSEP 557 Winter 213 Homework #1 Displays, Image Processing, Affine Transformations, Hierarchical modeling, Projections Assigned: Tuesday, January 22 nd Due: Tuesday,
CS 4620 Midterm, October 23, 2018 SOLUTION
 1. [20 points] Transformations CS 4620 Midterm, October 23, 2018 SOLUTION (a) Describe the action of each of the following matrices, as transformations in homogeneous coordinates, in terms of rotation,
1. [20 points] Transformations CS 4620 Midterm, October 23, 2018 SOLUTION (a) Describe the action of each of the following matrices, as transformations in homogeneous coordinates, in terms of rotation,
Transforms. COMP 575/770 Spring 2013
 Transforms COMP 575/770 Spring 2013 Transforming Geometry Given any set of points S Could be a 2D shape, a 3D object A transform is a function T that modifies all points in S: T S S T v v S Different transforms
Transforms COMP 575/770 Spring 2013 Transforming Geometry Given any set of points S Could be a 2D shape, a 3D object A transform is a function T that modifies all points in S: T S S T v v S Different transforms
Translation. 3D Transformations. Rotation about z axis. Scaling. CS 4620 Lecture 8. 3 Cornell CS4620 Fall 2009!Lecture 8
 Translation 3D Transformations CS 4620 Lecture 8 1 2 Scaling Rotation about z axis 3 4 Rotation about x axis Rotation about y axis 5 6 Transformations in OpenGL Stack-based manipulation of model-view transformation,
Translation 3D Transformations CS 4620 Lecture 8 1 2 Scaling Rotation about z axis 3 4 Rotation about x axis Rotation about y axis 5 6 Transformations in OpenGL Stack-based manipulation of model-view transformation,
CSC 470 Computer Graphics
 CSC 470 Computer Graphics Transformations of Objects CSC 470 Computer Graphics, Dr.N. Georgieva, CSI/CUNY 1 Transformations of objects - 2D CSC 470 Computer Graphics, Dr.N. Georgieva, CSI/CUNY 2 Using
CSC 470 Computer Graphics Transformations of Objects CSC 470 Computer Graphics, Dr.N. Georgieva, CSI/CUNY 1 Transformations of objects - 2D CSC 470 Computer Graphics, Dr.N. Georgieva, CSI/CUNY 2 Using
Image Warping, Linear Algebra CIS581
 Image Warping, Linear Algebra CIS581 From Plane to Plane Degree of freedom Translation: # correspondences? How many correspondences needed for translation? How many Degrees of Freedom? What is the transformation
Image Warping, Linear Algebra CIS581 From Plane to Plane Degree of freedom Translation: # correspondences? How many correspondences needed for translation? How many Degrees of Freedom? What is the transformation
Affine Transformations Computer Graphics Scott D. Anderson
 Affine Transformations Computer Graphics Scott D. Anderson 1 Linear Combinations To understand the poer of an affine transformation, it s helpful to understand the idea of a linear combination. If e have
Affine Transformations Computer Graphics Scott D. Anderson 1 Linear Combinations To understand the poer of an affine transformation, it s helpful to understand the idea of a linear combination. If e have
COMP30019 Graphics and Interaction Three-dimensional transformation geometry and perspective
 COMP30019 Graphics and Interaction Three-dimensional transformation geometry and perspective Department of Computing and Information Systems The Lecture outline Introduction Rotation about artibrary axis
COMP30019 Graphics and Interaction Three-dimensional transformation geometry and perspective Department of Computing and Information Systems The Lecture outline Introduction Rotation about artibrary axis
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Class #10 Wednesday, November 8, 2017
 Graphics In Excel Before we create a simulation, we need to be able to make a drawing in Excel. The techniques we use here are also used in Mathematica and LabVIEW. Drawings in Excel take place inside
Graphics In Excel Before we create a simulation, we need to be able to make a drawing in Excel. The techniques we use here are also used in Mathematica and LabVIEW. Drawings in Excel take place inside
INTRODUCTION TO COMPUTER GRAPHICS. It looks like a matrix Sort of. Viewing III. Projection in Practice. Bin Sheng 10/11/ / 52
 cs337 It looks like a matrix Sort of Viewing III Projection in Practice / 52 cs337 Arbitrary 3D views Now that we have familiarity with terms we can say that these view volumes/frusta can be specified
cs337 It looks like a matrix Sort of Viewing III Projection in Practice / 52 cs337 Arbitrary 3D views Now that we have familiarity with terms we can say that these view volumes/frusta can be specified
Figure 1. Lecture 1: Three Dimensional graphics: Projections and Transformations
 Lecture 1: Three Dimensional graphics: Projections and Transformations Device Independence We will start with a brief discussion of two dimensional drawing primitives. At the lowest level of an operating
Lecture 1: Three Dimensional graphics: Projections and Transformations Device Independence We will start with a brief discussion of two dimensional drawing primitives. At the lowest level of an operating
Scene Graphs. CS4620/5620: Lecture 7. Announcements. HW 1 out. PA 1 will be out on Wed
 CS4620/5620: Lecture 7 Scene Graphs 1 Announcements HW 1 out PA 1 will be out on Wed Next week practicum will have an office hour type session on Open GL 2 Example Can represent drawing with flat list
CS4620/5620: Lecture 7 Scene Graphs 1 Announcements HW 1 out PA 1 will be out on Wed Next week practicum will have an office hour type session on Open GL 2 Example Can represent drawing with flat list
Coordinate transformations. 5554: Packet 8 1
 Coordinate transformations 5554: Packet 8 1 Overview Rigid transformations are the simplest Translation, rotation Preserve sizes and angles Affine transformation is the most general linear case Homogeneous
Coordinate transformations 5554: Packet 8 1 Overview Rigid transformations are the simplest Translation, rotation Preserve sizes and angles Affine transformation is the most general linear case Homogeneous
Overview. Affine Transformations (2D and 3D) Coordinate System Transformations Vectors Rays and Intersections
 Coordinate System Transformations Vectors Rays and Intersections") Overview Affine Transformations (2D and 3D) Coordinate System Transformations Vectors Rays and Intersections ITCS 4120/5120 1 Mathematical Fundamentals Geometric Transformations A set of tools that aid
Overview Affine Transformations (2D and 3D) Coordinate System Transformations Vectors Rays and Intersections ITCS 4120/5120 1 Mathematical Fundamentals Geometric Transformations A set of tools that aid
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
Building Java Programs
 Building Java Programs Graphics reading: Supplement 3G videos: Ch. 3G #1-2 Objects (briefly) object: An entity that contains data and behavior. data: variables inside the object behavior: methods inside
Building Java Programs Graphics reading: Supplement 3G videos: Ch. 3G #1-2 Objects (briefly) object: An entity that contains data and behavior. data: variables inside the object behavior: methods inside
The Menger Sponge in Google SketchUp
 The Sierpinsky Carpet (shown below on the left) is a 2D fractal made from squares repeatedly divided into nine smaller squares. The Menger Sponge (shown below on the right) is the 3D version of this fractal.
The Sierpinsky Carpet (shown below on the left) is a 2D fractal made from squares repeatedly divided into nine smaller squares. The Menger Sponge (shown below on the right) is the 3D version of this fractal.
Today s class. Geometric objects and transformations. Informationsteknologi. Wednesday, November 7, 2007 Computer Graphics - Class 5 1
 Toda s class Geometric objects and transformations Wednesda, November 7, 27 Computer Graphics - Class 5 Vector operations Review of vector operations needed for working in computer graphics adding two
Toda s class Geometric objects and transformations Wednesda, November 7, 27 Computer Graphics - Class 5 Vector operations Review of vector operations needed for working in computer graphics adding two
(C) 2010 Pearson Education, Inc. All rights reserved. Omer Boyaci
 2010 Pearson Education, Inc. All rights reserved. Omer Boyaci") Omer Boyaci A sprite must monitor the game environment, for example, reacting to collisions with different sprites or stopping when it encounters an obstacle. Collision processing can be split into two
Omer Boyaci A sprite must monitor the game environment, for example, reacting to collisions with different sprites or stopping when it encounters an obstacle. Collision processing can be split into two
CS F-07 Objects in 2D 1
 CS420-2010F-07 Objects in 2D 1 07-0: Representing Polgons We want to represent a simple polgon Triangle, rectangle, square, etc Assume for the moment our game onl uses these simple shapes No curves for
CS420-2010F-07 Objects in 2D 1 07-0: Representing Polgons We want to represent a simple polgon Triangle, rectangle, square, etc Assume for the moment our game onl uses these simple shapes No curves for
Homework #1. Displays, Alpha Compositing, Image Processing, Affine Transformations, Hierarchical Modeling
 Computer Graphics Instructor: Brian Curless CSE 457 Spring 2014 Homework #1 Displays, Alpha Compositing, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Saturday, April th Due:
Computer Graphics Instructor: Brian Curless CSE 457 Spring 2014 Homework #1 Displays, Alpha Compositing, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Saturday, April th Due:
Computer Graphics. Lecture 2. Doç. Dr. Mehmet Gokturk
 Computer Graphics Lecture 2 Doç. Dr. Mehmet Gokturk Mathematical Foundations l Hearn and Baker (A1 A4) appendix gives good review l Some of the mathematical tools l Trigonometry l Vector spaces l Points,
Computer Graphics Lecture 2 Doç. Dr. Mehmet Gokturk Mathematical Foundations l Hearn and Baker (A1 A4) appendix gives good review l Some of the mathematical tools l Trigonometry l Vector spaces l Points,
Computer Vision cmput 428/615
 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Topics. Transient vs Persistent Representation of Objects. Object Serialization CSE Lecture 9 Inheritance, III
 Topics CSE 1720 object serialization transformation of drawing space (rotate, shear, ) Lecture 9 Inheritance, III 2 Transient vs Persistent Representation of Objects we already know and understand that
Topics CSE 1720 object serialization transformation of drawing space (rotate, shear, ) Lecture 9 Inheritance, III 2 Transient vs Persistent Representation of Objects we already know and understand that
Homework #1. Displays, Image Processing, Affine Transformations, Hierarchical Modeling
 Computer Graphics Instructor: Brian Curless CSE 457 Spring 215 Homework #1 Displays, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Thursday, April 9 th Due: Thursday, April
Computer Graphics Instructor: Brian Curless CSE 457 Spring 215 Homework #1 Displays, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Thursday, April 9 th Due: Thursday, April
DHANALAKSHMI COLLEGE OF ENGINEERING, CHENNAI
 DHANALAKSHMI COLLEGE OF ENGINEERING, CHENNAI Department of Computer Science and Engineering CS6504-COMPUTER GRAPHICS Anna University 2 & 16 Mark Questions & Answers Year / Semester: III / V Regulation:
DHANALAKSHMI COLLEGE OF ENGINEERING, CHENNAI Department of Computer Science and Engineering CS6504-COMPUTER GRAPHICS Anna University 2 & 16 Mark Questions & Answers Year / Semester: III / V Regulation: