/10/$ IEEE 4048
|
|
|
- Lauren Butler
- 5 years ago
- Views:
Transcription

1 21 IEEE International onference on Robotics and Automation Anchorage onvention District May 3-8, 21, Anchorage, Alaska, USA /1/$ IEEE 448


![Drummond and ipolla [3] solved a similar problem, but enhanced robustness by using the iterative re-weighted least squares with a M-estimator.](/docs-images/95/124846362/images/2-2.jpg "To perform hidden line removal, they used a BSP (Binary Space Partition) tree.")
![Marchand and haumette [4] proposed an augmented reality framework, which relies on points and lines, and that has been applied to the visual servoing [5]. omport et al.](/docs-images/95/124846362/images/2-3.jpg "[6] compared and evaluated the two different systems, but they concluded both are fundamentally equivalent. In keypoint-based methods, a sparse 3D metric model is used.")

2 Fig. 2: Example keyframes of the teabox object. The keyframes are saved during offline analysis and later utilized in the GPE. to the real object, the system use the previous pose estimate as a priori. Since it use an 1-D search along the normal direction of sample points for the closest edge locations, it rapidly calculate errors which must be minimized to solve for the 6-DOF motion parameters. The motion parameters are subsequently estimated between frames. Drummond and ipolla [3] solved a similar problem, but enhanced robustness by using the iterative re-weighted least squares with a M-estimator. To perform hidden line removal, they used a BSP (Binary Space Partition) tree. Marchand and haumette [4] proposed an augmented reality framework, which relies on points and lines, and that has been applied to the visual servoing [5]. omport et al. [6] compared and evaluated the two different systems, but they concluded both are fundamentally equivalent. In keypoint-based methods, a sparse 3D metric model is used. Like AD models, the keypoint models are built offline. With a set of images in each has a view of an object from a slightly different viewpoint, the non-linear optimization algorithm, such as Levenberg-Marquardt, return a refined 3D model of keypoints. Since this model maintains 3D coordinates of each keypoint, the pose estimation is easily performed by using the correspondence between the 3D points of the model and the 2D keypoints in an input image. Using this model, Gordon and Lowe [7] proposed an augmented reality system that calculates pose with scale invariant features [8]. ollet et al. [9] applied a similar method to robot manipulation where they combined RANSA [1] with a clustering algorithm to locate multiple instances. Vacchetti et al. [11] used standard corner features to match the current image and the reference frames, so called keyframes. Unlike the efforts using non-linear optimization, they obtained 3D coordinates of 2D corner points by back-projecting them onto the object AD model. Since the edge and the keypoint methods are complementary to each other, several have reported combined approaches [12], [13]. Vacchetti et al. [14] incorporated the edge-based method with their corner point-based method to make the system more robust and jitter free. As part of the edge-based tracking, they used multiple hypotheses to handle erroneous edge correspondence, but it is equivalent to the nearest hypothesis of RAPiD-like approaches. Rosten and Drummond [15] similarly combined corner points with lines, but they only used corner points to estimate motion parameters between frames. We also adopt a combined approach in which keypointbased matching and edge-based tracking are employed. As depicted in Fig. 1, our system is composed of a Global Pose Estimation (GPE) and a Local Pose Estimation (LPE). Unlike [14] and [15] which use keypoints to estimate motion between frames, we only use the keypoints for estimating the initial pose in GPE. After estimating the initial pose an edge-based tracking scheme is utilized in the LPE. In the remainder of the paper, we first explain the GPE in Section III. Section IV describes the LPE including the salient edge selection from polygon mesh models and the edge-based tracking formulation. Quantitative and qualitative results using the system are presented in Section V. III. GLOBAL POSE ESTIMATION USING KEYPOINTS In this section, we present the Global Pose Estimation (GPE) in which we use SURF keypoints [16] to match the current image with keyframes. The model keyframe is a set of images that contains a target object. The keyframes are saved offline. To estimate pose, the 3D coordinate of each keypoint is computed by back-projecting to the AD model. A. Keyframe Model Acquisition To estimate an initial pose, our system requires keyframes, which are reference images. Since the keyframes will be compared with the input image, the keyframes should contain appearance of the object similar to the one in the input image. But it is practically impossible to maintain every image to cover all possible appearances of the object due to variability across illumination, scale, orientation and viewpoint. In a real application, a smaller number of keyframes is preferred. Ideally there would only be one keyframe per aspect for the object. For the maximum coverage of a keyframe, a keypoint descriptor that describes local appearance around corner-like points is used. If the local descriptor is discriminative then matching keypoints between two images can be performed despite variations in orientation, scale, and illumination. However, the local appearance is only semiinvariant to viewpoint change. For robust pose initialization we are required to maintain multiple keyframes to cover multiple view aspects. apturing keyframes is performed offline. Since keyframes will be used for pose estimation in which there is a need for generation of 2D-3D correspondences, we need to know the 3D coordinates of each keypoint. To calculate 3D coordinates, we use 3D AD models with the current pose estimate. In this phase, the current pose is estimated by the LPE as will be explained in Section IV. With a AD model and the current pose, we can compute the 3D coordinates of each keypoint by back-projecting the 2D keypoint to 449

![the image buffer that OpenGL renders [11]. The 3D coordinates of the keypoints are then saved into a file for later use in keypoint matching. B.](/docs-images/95/124846362/images/3-1.jpg "Matching keypoints After obtaining keyframes offline, keypoint matching is performed between an input frame and keyframes. A simple strategy for the matching might use naïve exhaustive search.")
 algorithm [17] which can be performed in O(n log n).")
3 Fig. 3: Original and simplified AD models. By using the salient edges selection, we can get a set of good model edges to track. the corresponding facet of the AD model. For fast facet identification, we use Facet-ID trick which encodes i-th facet of the target object s model in an unique color in order to identify the membership of each 2D keypoints by looking up the image buffer that OpenGL renders [11]. The 3D coordinates of the keypoints are then saved into a file for later use in keypoint matching. B. Matching keypoints After obtaining keyframes offline, keypoint matching is performed between an input frame and keyframes. A simple strategy for the matching might use naïve exhaustive search. However, such a search has O(n 2 ) complexity. Using an approximate method the complexity can be reduced. As an approximated search, we use the Best-Bin-First (BBF) algorithm [17] which can be performed in O(n log n). While [18] and [8] used a fixed number of nearest-neighbors, we set the number of nearest-neighbors as the number of keyframe + 1. We use the ratio test described by [8], and the ratio threshold we used was.7. Once the putative correspondences has been determined, they are further refined using RANSA [1]. In each RANSA iteration, we estimate a homography matrix and eliminate outliers from the homography matrix. Since general objects have multiple faces or even curved surface, using the homography matrix might not be an optimal solution. It is here assumed that correspondences can be approximated by a plane to plane transformation. In addition, the size of objects is relatively small in images, so this approximation does not limit the number of correspondences. Another solution would be estimating a camera projection matrix directly as part of the RANSA as we know 3D coordinates of each 2D keypoint, an option that may be considered in future work. After removing outliers, we then calculate the 6-DOF pose parameters by using standard least square estimation. This pose estimate is provided to the LPE as an initial value. IV. LOAL POSE ESTIMATION USING EDGES In this section, we explain the Local Pose Estimation (LPE) in which edges are utilized for object tracking. A. Automatic Salient Model Edges Selection Fig. 5: Determining salient edges. We use the face normal vectors available in the model. Since most of objects which exist in our daily environment are manufactured, their AD models might be available, and such models provide helpful information for robotic manipulation. Although there are various formats in AD models, most of them can be represented in a polygon mesh. A polygon mesh is usually composed of vertices, edges, faces, polygons and surfaces. In the LPE, we use edge features in images coming from a monocular camera to estimate the pose difference between two consecutive frames. So we should determine which edges in the model of a targeted object would be visible in images. Here we make an assumption that sharp edges are more likely to be salient. To identify sharp edges, we use the face normal vectors from the model. As illustrated in Fig. 5, if the face normal vectors of two adjacent faces are close to perpendicular, the edge shared by the two faces is regarded a sharp edge. If two face normal vectors are close to parallel, the edge is regarded a dull edge. For the decision, we use a simple thresholding scheme with the value of the inner product of two normal vectors. More formally, we can define an indicator function with respect to 45

4 451













 T and N is the number of")


 ui i v i T = n ( ) i")

 ( ) ũ")




5 Fig. 6: Tracking results of the four targeted objects. From top to bottom, teabox, book, cup and car door. From left to right, t < 1, t = 1, t = 2, t = 3, t = 4 and t = 5 where t is the frame number. The very left images are results of the GPE. where e i is the Euclidean distance from i-th sample point to the nearest edge and N is the number of valid sample points (i.e. sample points correspond to the nearest edge). Fig. 7 illustrates the error calculation, and e i is the length of the i-th red arrow. D. Update Pose with IRLS After calculating the error vector e, the problem is reduced to: ˆµ = arg min µ = arg min µ N e i 2 i=1 N p i Proj(P M i ;E t exp(µ), K) 2 i=1 where p i is the 2D image coordinates of the nearest edge which is corresponding to the projected 2D point of the i-th 3D model coordinates P M i = (x M i y M i z M i 1) T and N is the number of valid sample points. To calculate µ which minimizes the error e, a Jacobian matrix J R N 6 can be obtained by computing partial derivatives at the current pose: J ij = e i T = n ( ) ui i v i T = n ( ) i Proj(P M i ;E t exp(µ), K) where n i is the unit normal vector of the i-th sample point. We can split Proj() in Eq. 2 into two parts as follows: ( ) ( ) ũ ui fu u i = ṽ v i f v v i 1 ) (ũi = ṽ i ũ i v i ũ i u i ṽ i v i ṽ i x i zi y i zi Their corresponding Jacobian matrices can be obtained: ( ) ui ( ) fu J K = = f v Since J P = ( ũi x i ṽ i x i ũ i yi ṽ i yi ũ i zi ṽ i zi ) = 1 zi 1 z i x i (z i )2 y i (z i )2 (exp(µ)) = G j at µ = by Eq. 1, we can get: P i = (E t exp(µ)p M i ) = E t G j P M i Therefore the i th row and j th column element of the Jacobian matrix J is: J ij = e ( ) i = n T i J K J P E t G j P M i We can solve the following equation to calculate the motion velocities: Jµ = e 452
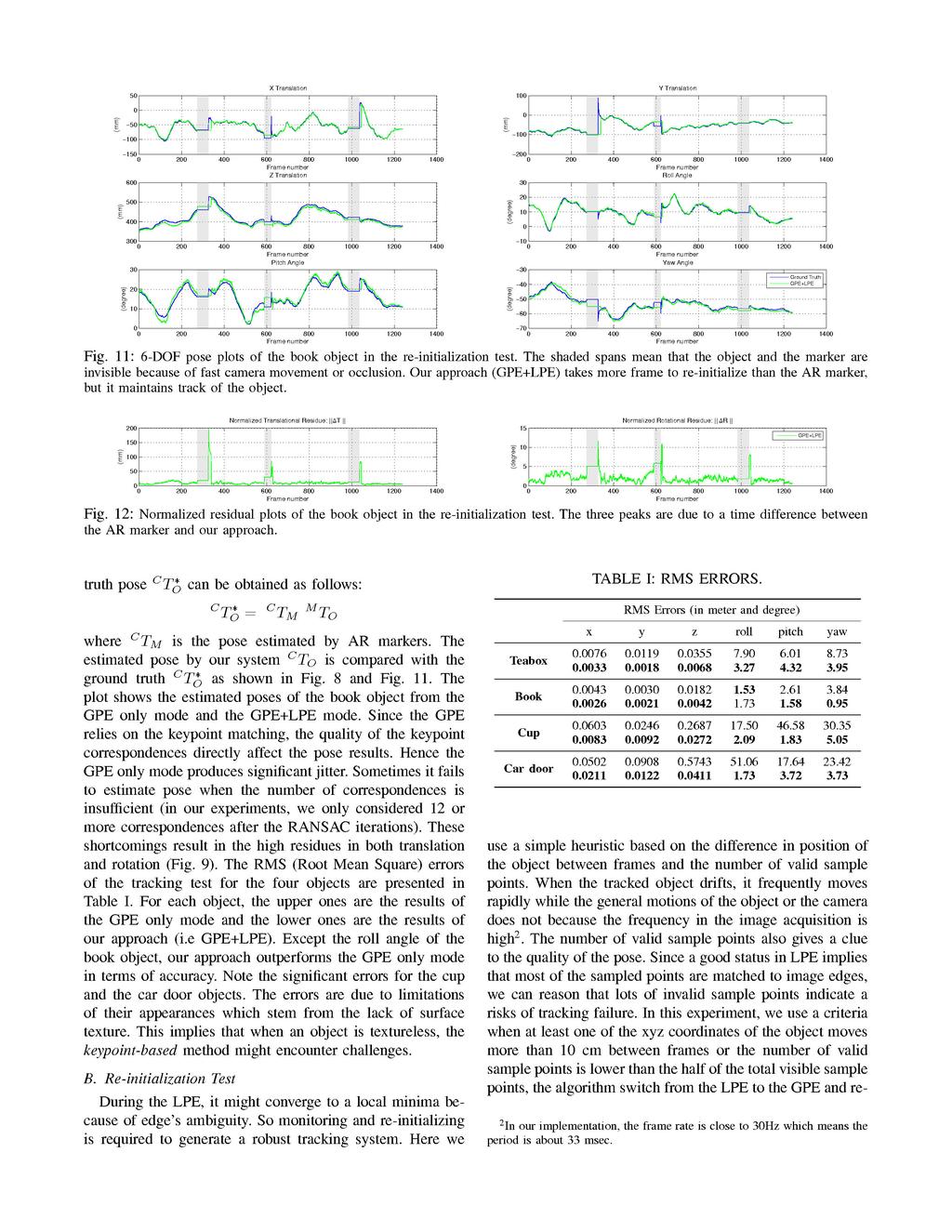
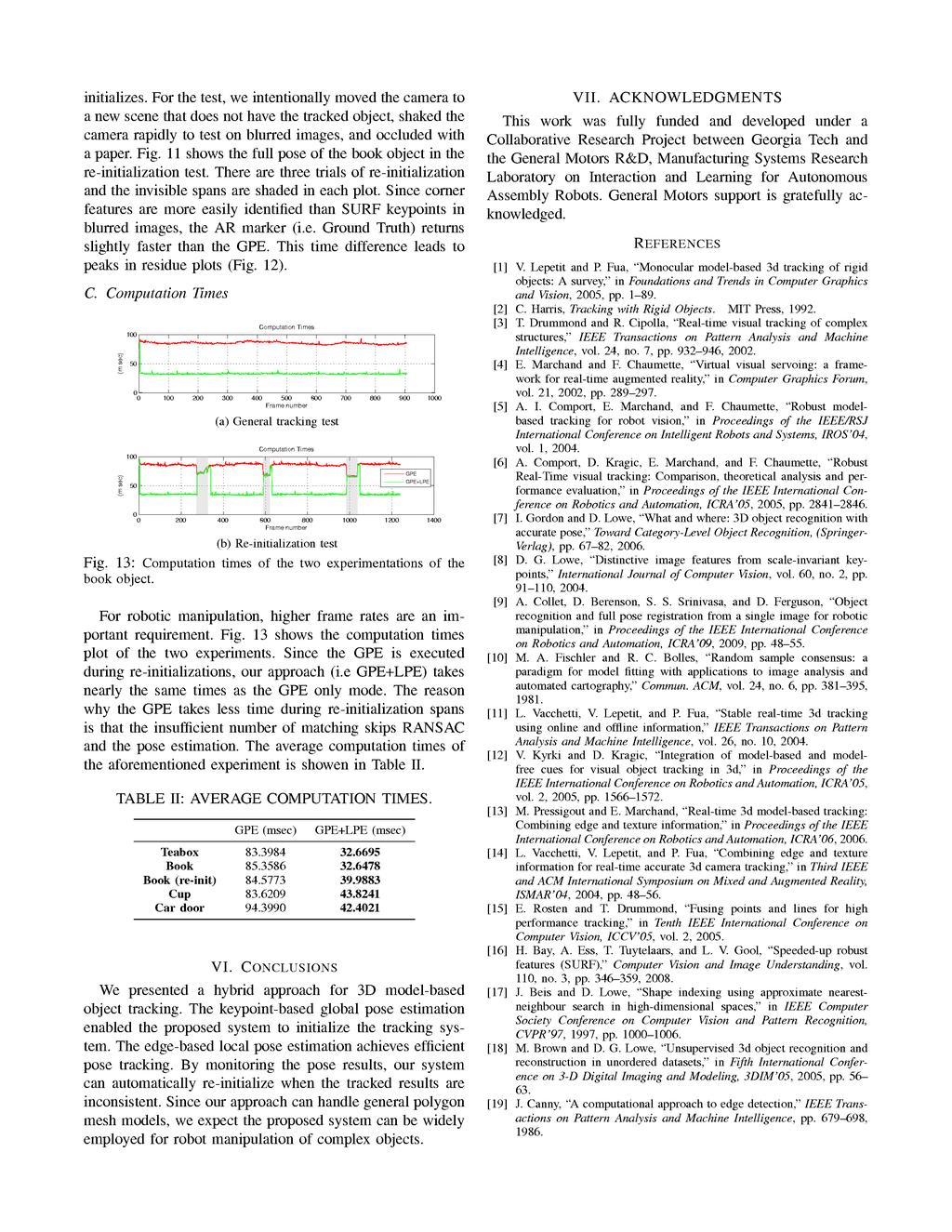
6 X Translation Y Translation (mm) 5 1 (mm) Z Translation Roll Angle 1 (mm) 5 4 (degree) 5 (degree) Pitch Angle (degree) Yaw Angle 2 Ground Truth GPE GPE+LPE Fig. 8: 6-DOF pose plots of the book object in the general tracking test. While our approach (GPE+LPE) has convergence to ground truth, the GPE only mode suffers from jitter and occasionally fails to estimate pose. (mm) Normalized Translational Residue: T (degree) Normalized Rotational Residue: R GPE GPE+LPE Fig. 9: Normalized residue plots of the book object in the general tracking test. The jitter and tracking failures result in a high residual. Rather than using the usual pseudo-inverse of J, we solve the above equation with Iterative Re-weight Least Square (IRLS) and M-estimator: ˆµ = (J T WJ) 1 J T We where W is a diagonal matrix determined by a M-estimator. The i-th diagonal element in W is w i = 1 c+e i where c is a constant. V. EXPERIMENTAL RESULTS Fig. 1: Experimental setting and transformations between camera {}, object {O} and marker {M} frames. We used AR markers to compute the ground truth pose. In this section, we validate our visual recognition and tracking algorithm with several experiments. To show the generality of our system, we performed experiments with 4 objects: teabox, book, cup and car door. Note that these objects have different complexity and characteristics. The first three objects are especially interesting in for service robotics while the last object is of interest for assembly robots. Our system is composed of a standard desktop computer and a Point Grey Research s Flea 1394 camera (64 48 resolution). The AD models of teabox, book and cup were generated by using Blender TM which is an open source 3D modeling tool. The car door model was provided by an automobile company. We converted all of the models to the OBJ format 1 to be used in our ++ implementation. For the GPE, we prepared keyframe images. As a smaller number of keyframes is desirable, we captured only five keyframes per object. Each keyframe has different appearances of object as shown in Fig. 2. A. General Tracking Test The tracking results for the four objects are shown in Fig. 6. The images in left-most column show estimated pose from the GPE and the last of them depicts the pose estimated by the LPE. Note that although the pose estimated by the GPE is not perfect, the subsequent LPE corrects the error and the pose estimates converge to the real pose. For quantitative evaluation, we employed AR markers to gather ground truth pose data. As shown in Fig. 1, we manually measured the transformation M T O which is the description of the object frame {O} relative to the marker frame {M}. So the ground 1 OBJ format is developed by Wavefront Technologies and has been widely accepted for 3D graphics. That format can be easily handled by using the GLUT library. 453
7 454
8 455
Real-time 3D Model-based Tracking Using Edge and Keypoint Features for Robotic Manipulation
 21 IEEE International onference on Robotics and Automation Anchorage onvention District May 3-8, 21, Anchorage, Alaska, USA Real-time 3D Model-based Tracking Using Edge and Keypoint Features for Robotic
21 IEEE International onference on Robotics and Automation Anchorage onvention District May 3-8, 21, Anchorage, Alaska, USA Real-time 3D Model-based Tracking Using Edge and Keypoint Features for Robotic
Augmenting Reality, Naturally:
 Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Computational Optical Imaging - Optique Numerique. -- Multiple View Geometry and Stereo --
 Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Outline. Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion. Media IC & System Lab Po-Chen Wu 2
 Outline Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion Media IC & System Lab Po-Chen Wu 2 Outline Introduction System Overview Camera Calibration
Outline Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion Media IC & System Lab Po-Chen Wu 2 Outline Introduction System Overview Camera Calibration
Computational Optical Imaging - Optique Numerique. -- Single and Multiple View Geometry, Stereo matching --
 Computational Optical Imaging - Optique Numerique -- Single and Multiple View Geometry, Stereo matching -- Autumn 2015 Ivo Ihrke with slides by Thorsten Thormaehlen Reminder: Feature Detection and Matching
Computational Optical Imaging - Optique Numerique -- Single and Multiple View Geometry, Stereo matching -- Autumn 2015 Ivo Ihrke with slides by Thorsten Thormaehlen Reminder: Feature Detection and Matching
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
CS231A Section 6: Problem Set 3
 CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
Overview. Augmented reality and applications Marker-based augmented reality. Camera model. Binary markers Textured planar markers
 Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
A REAL-TIME TRACKING SYSTEM COMBINING TEMPLATE-BASED AND FEATURE-BASED APPROACHES
 A REAL-TIME TRACKING SYSTEM COMBINING TEMPLATE-BASED AND FEATURE-BASED APPROACHES Alexander Ladikos, Selim Benhimane, Nassir Navab Department of Computer Science, Technical University of Munich, Boltzmannstr.
A REAL-TIME TRACKING SYSTEM COMBINING TEMPLATE-BASED AND FEATURE-BASED APPROACHES Alexander Ladikos, Selim Benhimane, Nassir Navab Department of Computer Science, Technical University of Munich, Boltzmannstr.
Identifying Car Model from Photographs
 Identifying Car Model from Photographs Fine grained Classification using 3D Reconstruction and 3D Shape Registration Xinheng Li davidxli@stanford.edu Abstract Fine grained classification from photographs
Identifying Car Model from Photographs Fine grained Classification using 3D Reconstruction and 3D Shape Registration Xinheng Li davidxli@stanford.edu Abstract Fine grained classification from photographs
A Systems View of Large- Scale 3D Reconstruction
 Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Scene Modelling, Recognition and Tracking with Invariant Image Features
 Scene Modelling, Recognition and Tracking with Invariant Image Features Iryna Gordon and David G. Lowe University of British olumbia Department of omputer Science Vancouver, B, anada skrypnyk, lowe @cs.ubc.ca
Scene Modelling, Recognition and Tracking with Invariant Image Features Iryna Gordon and David G. Lowe University of British olumbia Department of omputer Science Vancouver, B, anada skrypnyk, lowe @cs.ubc.ca
CS 395T Lecture 12: Feature Matching and Bundle Adjustment. Qixing Huang October 10 st 2018
 CS 395T Lecture 12: Feature Matching and Bundle Adjustment Qixing Huang October 10 st 2018 Lecture Overview Dense Feature Correspondences Bundle Adjustment in Structure-from-Motion Image Matching Algorithm
CS 395T Lecture 12: Feature Matching and Bundle Adjustment Qixing Huang October 10 st 2018 Lecture Overview Dense Feature Correspondences Bundle Adjustment in Structure-from-Motion Image Matching Algorithm
Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving assistance applications on smart mobile devices
 Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
3D Environment Reconstruction
 3D Environment Reconstruction Using Modified Color ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15,
3D Environment Reconstruction Using Modified Color ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15,
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Robot localization method based on visual features and their geometric relationship
 , pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
, pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features
 Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Dynamic Geometry Processing
 Dynamic Geometry Processing EG 2012 Tutorial Will Chang, Hao Li, Niloy Mitra, Mark Pauly, Michael Wand Tutorial: Dynamic Geometry Processing 1 Articulated Global Registration Introduction and Overview
Dynamic Geometry Processing EG 2012 Tutorial Will Chang, Hao Li, Niloy Mitra, Mark Pauly, Michael Wand Tutorial: Dynamic Geometry Processing 1 Articulated Global Registration Introduction and Overview
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Tracking system. Danica Kragic. Object Recognition & Model Based Tracking
 Tracking system Object Recognition & Model Based Tracking Motivation Manipulating objects in domestic environments Localization / Navigation Object Recognition Servoing Tracking Grasping Pose estimation
Tracking system Object Recognition & Model Based Tracking Motivation Manipulating objects in domestic environments Localization / Navigation Object Recognition Servoing Tracking Grasping Pose estimation
3D Model Acquisition by Tracking 2D Wireframes
 3D Model Acquisition by Tracking 2D Wireframes M. Brown, T. Drummond and R. Cipolla {96mab twd20 cipolla}@eng.cam.ac.uk Department of Engineering University of Cambridge Cambridge CB2 1PZ, UK Abstract
3D Model Acquisition by Tracking 2D Wireframes M. Brown, T. Drummond and R. Cipolla {96mab twd20 cipolla}@eng.cam.ac.uk Department of Engineering University of Cambridge Cambridge CB2 1PZ, UK Abstract
3D Visualization through Planar Pattern Based Augmented Reality
 NATIONAL TECHNICAL UNIVERSITY OF ATHENS SCHOOL OF RURAL AND SURVEYING ENGINEERS DEPARTMENT OF TOPOGRAPHY LABORATORY OF PHOTOGRAMMETRY 3D Visualization through Planar Pattern Based Augmented Reality Dr.
NATIONAL TECHNICAL UNIVERSITY OF ATHENS SCHOOL OF RURAL AND SURVEYING ENGINEERS DEPARTMENT OF TOPOGRAPHY LABORATORY OF PHOTOGRAMMETRY 3D Visualization through Planar Pattern Based Augmented Reality Dr.
Robotic Grasping Based on Efficient Tracking and Visual Servoing using Local Feature Descriptors
 INTERNATIONAL JOURNAL OF PRECISION ENGINEERING AND MANUFACTURING Vol. 13, No. 3, pp. 387-393 MARCH 2012 / 387 DOI: 10.1007/s12541-012-0049-8 Robotic Grasping Based on Efficient Tracking and Visual Servoing
INTERNATIONAL JOURNAL OF PRECISION ENGINEERING AND MANUFACTURING Vol. 13, No. 3, pp. 387-393 MARCH 2012 / 387 DOI: 10.1007/s12541-012-0049-8 Robotic Grasping Based on Efficient Tracking and Visual Servoing
Tracking complex targets for space rendezvous and debris removal applications
 Tracking complex targets for space rendezvous and debris removal applications Antoine Petit, Eric Marchand, Keyvan Kanani Abstract In the context of autonomous rendezvous and space debris removal, visual
Tracking complex targets for space rendezvous and debris removal applications Antoine Petit, Eric Marchand, Keyvan Kanani Abstract In the context of autonomous rendezvous and space debris removal, visual
Local quadrics surface approximation for real-time tracking of textureless 3D rigid curved objects
 Local quadrics surface approximation for real-time tracking of textureless 3D rigid curved objects Marina Atsumi Oikawa, Takafumi Taketomi, Goshiro Yamamoto Nara Institute of Science and Technology, Japan
Local quadrics surface approximation for real-time tracking of textureless 3D rigid curved objects Marina Atsumi Oikawa, Takafumi Taketomi, Goshiro Yamamoto Nara Institute of Science and Technology, Japan
Topological Mapping. Discrete Bayes Filter
 Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels
 Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIENCE, VOL.32, NO.9, SEPTEMBER 2010 Hae Jong Seo, Student Member,
Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIENCE, VOL.32, NO.9, SEPTEMBER 2010 Hae Jong Seo, Student Member,
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Specular 3D Object Tracking by View Generative Learning
 Specular 3D Object Tracking by View Generative Learning Yukiko Shinozuka, Francois de Sorbier and Hideo Saito Keio University 3-14-1 Hiyoshi, Kohoku-ku 223-8522 Yokohama, Japan shinozuka@hvrl.ics.keio.ac.jp
Specular 3D Object Tracking by View Generative Learning Yukiko Shinozuka, Francois de Sorbier and Hideo Saito Keio University 3-14-1 Hiyoshi, Kohoku-ku 223-8522 Yokohama, Japan shinozuka@hvrl.ics.keio.ac.jp
Trademark Matching and Retrieval in Sport Video Databases
 Trademark Matching and Retrieval in Sport Video Databases Andrew D. Bagdanov, Lamberto Ballan, Marco Bertini and Alberto Del Bimbo {bagdanov, ballan, bertini, delbimbo}@dsi.unifi.it 9th ACM SIGMM International
Trademark Matching and Retrieval in Sport Video Databases Andrew D. Bagdanov, Lamberto Ballan, Marco Bertini and Alberto Del Bimbo {bagdanov, ballan, bertini, delbimbo}@dsi.unifi.it 9th ACM SIGMM International
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images
 Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images 1 Introduction - Steve Chuang and Eric Shan - Determining object orientation in images is a well-established topic
Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images 1 Introduction - Steve Chuang and Eric Shan - Determining object orientation in images is a well-established topic
CSCI 5980/8980: Assignment #4. Fundamental Matrix
 Submission CSCI 598/898: Assignment #4 Assignment due: March 23 Individual assignment. Write-up submission format: a single PDF up to 5 pages (more than 5 page assignment will be automatically returned.).
Submission CSCI 598/898: Assignment #4 Assignment due: March 23 Individual assignment. Write-up submission format: a single PDF up to 5 pages (more than 5 page assignment will be automatically returned.).
UNIVERSITY OF TORONTO Faculty of Applied Science and Engineering. ROB501H1 F: Computer Vision for Robotics. Midterm Examination.
 UNIVERSITY OF TORONTO Faculty of Applied Science and Engineering ROB501H1 F: Computer Vision for Robotics October 26, 2016 Student Name: Student Number: Instructions: 1. Attempt all questions. 2. The value
UNIVERSITY OF TORONTO Faculty of Applied Science and Engineering ROB501H1 F: Computer Vision for Robotics October 26, 2016 Student Name: Student Number: Instructions: 1. Attempt all questions. 2. The value
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Visual Tracking (1) Pixel-intensity-based methods
 Pixel-intensity-based methods") Intelligent Control Systems Visual Tracking (1) Pixel-intensity-based methods Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Pixel-intensity-based methods Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Robust PDF Table Locator
 Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/91/106305353.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Expanding gait identification methods from straight to curved trajectories
 Expanding gait identification methods from straight to curved trajectories Yumi Iwashita, Ryo Kurazume Kyushu University 744 Motooka Nishi-ku Fukuoka, Japan yumi@ieee.org Abstract Conventional methods
Expanding gait identification methods from straight to curved trajectories Yumi Iwashita, Ryo Kurazume Kyushu University 744 Motooka Nishi-ku Fukuoka, Japan yumi@ieee.org Abstract Conventional methods
Inverse Kinematics II and Motion Capture
 Mathematical Foundations of Computer Graphics and Vision Inverse Kinematics II and Motion Capture Luca Ballan Institute of Visual Computing Comparison 0 1 A B 2 C 3 Fake exponential map Real exponential
Mathematical Foundations of Computer Graphics and Vision Inverse Kinematics II and Motion Capture Luca Ballan Institute of Visual Computing Comparison 0 1 A B 2 C 3 Fake exponential map Real exponential
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
ROBUST LINE-BASED CALIBRATION OF LENS DISTORTION FROM A SINGLE VIEW
 ROBUST LINE-BASED CALIBRATION OF LENS DISTORTION FROM A SINGLE VIEW Thorsten Thormählen, Hellward Broszio, Ingolf Wassermann thormae@tnt.uni-hannover.de University of Hannover, Information Technology Laboratory,
ROBUST LINE-BASED CALIBRATION OF LENS DISTORTION FROM A SINGLE VIEW Thorsten Thormählen, Hellward Broszio, Ingolf Wassermann thormae@tnt.uni-hannover.de University of Hannover, Information Technology Laboratory,
Bridging the Gap Between Local and Global Approaches for 3D Object Recognition. Isma Hadji G. N. DeSouza
 Bridging the Gap Between Local and Global Approaches for 3D Object Recognition Isma Hadji G. N. DeSouza Outline Introduction Motivation Proposed Methods: 1. LEFT keypoint Detector 2. LGS Feature Descriptor
Bridging the Gap Between Local and Global Approaches for 3D Object Recognition Isma Hadji G. N. DeSouza Outline Introduction Motivation Proposed Methods: 1. LEFT keypoint Detector 2. LGS Feature Descriptor
Advanced Topics In Machine Learning Project Report : Low Dimensional Embedding of a Pose Collection Fabian Prada
 Advanced Topics In Machine Learning Project Report : Low Dimensional Embedding of a Pose Collection Fabian Prada 1 Introduction In this project we present an overview of (1) low dimensional embedding,
Advanced Topics In Machine Learning Project Report : Low Dimensional Embedding of a Pose Collection Fabian Prada 1 Introduction In this project we present an overview of (1) low dimensional embedding,
Occluded Facial Expression Tracking
 Occluded Facial Expression Tracking Hugo Mercier 1, Julien Peyras 2, and Patrice Dalle 1 1 Institut de Recherche en Informatique de Toulouse 118, route de Narbonne, F-31062 Toulouse Cedex 9 2 Dipartimento
Occluded Facial Expression Tracking Hugo Mercier 1, Julien Peyras 2, and Patrice Dalle 1 1 Institut de Recherche en Informatique de Toulouse 118, route de Narbonne, F-31062 Toulouse Cedex 9 2 Dipartimento
Motion. 1 Introduction. 2 Optical Flow. Sohaib A Khan. 2.1 Brightness Constancy Equation
 Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Global localization from a single feature correspondence
 Global localization from a single feature correspondence Friedrich Fraundorfer and Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology {fraunfri,bischof}@icg.tu-graz.ac.at
Global localization from a single feature correspondence Friedrich Fraundorfer and Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology {fraunfri,bischof}@icg.tu-graz.ac.at
Monocular SLAM for a Small-Size Humanoid Robot
 Tamkang Journal of Science and Engineering, Vol. 14, No. 2, pp. 123 129 (2011) 123 Monocular SLAM for a Small-Size Humanoid Robot Yin-Tien Wang*, Duen-Yan Hung and Sheng-Hsien Cheng Department of Mechanical
Tamkang Journal of Science and Engineering, Vol. 14, No. 2, pp. 123 129 (2011) 123 Monocular SLAM for a Small-Size Humanoid Robot Yin-Tien Wang*, Duen-Yan Hung and Sheng-Hsien Cheng Department of Mechanical
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013
 Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Hartley - Zisserman reading club. Part I: Hartley and Zisserman Appendix 6: Part II: Zhengyou Zhang: Presented by Daniel Fontijne
 Hartley - Zisserman reading club Part I: Hartley and Zisserman Appendix 6: Iterative estimation methods Part II: Zhengyou Zhang: A Flexible New Technique for Camera Calibration Presented by Daniel Fontijne
Hartley - Zisserman reading club Part I: Hartley and Zisserman Appendix 6: Iterative estimation methods Part II: Zhengyou Zhang: A Flexible New Technique for Camera Calibration Presented by Daniel Fontijne
EN1610 Image Understanding Lab # 4: Corners, Interest Points, Hough Transform
 EN1610 Image Understanding Lab # 4: Corners, Interest Points, Hough Transform The goal of this fourth lab is to ˆ Learn how to detect corners, and use them in a tracking application ˆ Learn how to describe
EN1610 Image Understanding Lab # 4: Corners, Interest Points, Hough Transform The goal of this fourth lab is to ˆ Learn how to detect corners, and use them in a tracking application ˆ Learn how to describe
Augmented reality with the ARToolKit FMA175 version 1.3 Supervisor Petter Strandmark By Olle Landin
 Augmented reality with the ARToolKit FMA75 version.3 Supervisor Petter Strandmark By Olle Landin Ic7ol3@student.lth.se Introduction Agumented Reality (AR) is the overlay of virtual computer graphics images
Augmented reality with the ARToolKit FMA75 version.3 Supervisor Petter Strandmark By Olle Landin Ic7ol3@student.lth.se Introduction Agumented Reality (AR) is the overlay of virtual computer graphics images
Appearance-Based Place Recognition Using Whole-Image BRISK for Collaborative MultiRobot Localization
 Appearance-Based Place Recognition Using Whole-Image BRISK for Collaborative MultiRobot Localization Jung H. Oh, Gyuho Eoh, and Beom H. Lee Electrical and Computer Engineering, Seoul National University,
Appearance-Based Place Recognition Using Whole-Image BRISK for Collaborative MultiRobot Localization Jung H. Oh, Gyuho Eoh, and Beom H. Lee Electrical and Computer Engineering, Seoul National University,
Face Alignment Across Large Poses: A 3D Solution
 Face Alignment Across Large Poses: A 3D Solution Outline Face Alignment Related Works 3D Morphable Model Projected Normalized Coordinate Code Network Structure 3D Image Rotation Performance on Datasets
Face Alignment Across Large Poses: A 3D Solution Outline Face Alignment Related Works 3D Morphable Model Projected Normalized Coordinate Code Network Structure 3D Image Rotation Performance on Datasets
ORB SLAM 2 : an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras
 ORB SLAM 2 : an OpenSource SLAM System for Monocular, Stereo and RGBD Cameras Raul urartal and Juan D. Tardos Presented by: Xiaoyu Zhou Bolun Zhang Akshaya Purohit Lenord Melvix 1 Outline Background Introduction
ORB SLAM 2 : an OpenSource SLAM System for Monocular, Stereo and RGBD Cameras Raul urartal and Juan D. Tardos Presented by: Xiaoyu Zhou Bolun Zhang Akshaya Purohit Lenord Melvix 1 Outline Background Introduction
CS 664 Structure and Motion. Daniel Huttenlocher
 CS 664 Structure and Motion Daniel Huttenlocher Determining 3D Structure Consider set of 3D points X j seen by set of cameras with projection matrices P i Given only image coordinates x ij of each point
CS 664 Structure and Motion Daniel Huttenlocher Determining 3D Structure Consider set of 3D points X j seen by set of cameras with projection matrices P i Given only image coordinates x ij of each point
Robust and Accurate Detection of Object Orientation and ID without Color Segmentation
 0 Robust and Accurate Detection of Object Orientation and ID without Color Segmentation Hironobu Fujiyoshi, Tomoyuki Nagahashi and Shoichi Shimizu Chubu University Japan Open Access Database www.i-techonline.com
0 Robust and Accurate Detection of Object Orientation and ID without Color Segmentation Hironobu Fujiyoshi, Tomoyuki Nagahashi and Shoichi Shimizu Chubu University Japan Open Access Database www.i-techonline.com
Vision-Based Registration for Augmented Reality with Integration of Arbitrary Multiple Planes
 Vision-Based Registration for Augmented Reality with Integration of Arbitrary Multiple Planes Yuo Uematsu and Hideo Saito Keio University, Dept. of Information and Computer Science, Yoohama, Japan {yu-o,
Vision-Based Registration for Augmented Reality with Integration of Arbitrary Multiple Planes Yuo Uematsu and Hideo Saito Keio University, Dept. of Information and Computer Science, Yoohama, Japan {yu-o,
Multi-View Stereo for Static and Dynamic Scenes
 Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Robust Geometry Estimation from two Images
 Robust Geometry Estimation from two Images Carsten Rother 09/12/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation Process 09/12/2016 2 Appearance-based
Robust Geometry Estimation from two Images Carsten Rother 09/12/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation Process 09/12/2016 2 Appearance-based
3D SLAM in texture-less environments using rank order statistics Khalid Yousif, Alireza Bab-Hadiashar and Reza Hoseinnezhad
 3D SLAM in texture-less environments using rank order statistics Khalid Yousif, Alireza Bab-Hadiashar and Reza Hoseinnezhad School of Aerospace, Mechanical and Manufacturing Engineering, RMIT University,
3D SLAM in texture-less environments using rank order statistics Khalid Yousif, Alireza Bab-Hadiashar and Reza Hoseinnezhad School of Aerospace, Mechanical and Manufacturing Engineering, RMIT University,
Simultaneous Recognition and Homography Extraction of Local Patches with a Simple Linear Classifier
 Simultaneous Recognition and Homography Extraction of Local Patches with a Simple Linear Classifier Stefan Hinterstoisser 1, Selim Benhimane 1, Vincent Lepetit 2, Pascal Fua 2, Nassir Navab 1 1 Department
Simultaneous Recognition and Homography Extraction of Local Patches with a Simple Linear Classifier Stefan Hinterstoisser 1, Selim Benhimane 1, Vincent Lepetit 2, Pascal Fua 2, Nassir Navab 1 1 Department
SYDE Winter 2011 Introduction to Pattern Recognition. Clustering
 SYDE 372 - Winter 2011 Introduction to Pattern Recognition Clustering Alexander Wong Department of Systems Design Engineering University of Waterloo Outline 1 2 3 4 5 All the approaches we have learned
SYDE 372 - Winter 2011 Introduction to Pattern Recognition Clustering Alexander Wong Department of Systems Design Engineering University of Waterloo Outline 1 2 3 4 5 All the approaches we have learned
CS231A Course Notes 4: Stereo Systems and Structure from Motion
 CS231A Course Notes 4: Stereo Systems and Structure from Motion Kenji Hata and Silvio Savarese 1 Introduction In the previous notes, we covered how adding additional viewpoints of a scene can greatly enhance
CS231A Course Notes 4: Stereo Systems and Structure from Motion Kenji Hata and Silvio Savarese 1 Introduction In the previous notes, we covered how adding additional viewpoints of a scene can greatly enhance
ICRA 2016 Tutorial on SLAM. Graph-Based SLAM and Sparsity. Cyrill Stachniss
 ICRA 2016 Tutorial on SLAM Graph-Based SLAM and Sparsity Cyrill Stachniss 1 Graph-Based SLAM?? 2 Graph-Based SLAM?? SLAM = simultaneous localization and mapping 3 Graph-Based SLAM?? SLAM = simultaneous
ICRA 2016 Tutorial on SLAM Graph-Based SLAM and Sparsity Cyrill Stachniss 1 Graph-Based SLAM?? 2 Graph-Based SLAM?? SLAM = simultaneous localization and mapping 3 Graph-Based SLAM?? SLAM = simultaneous
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
Verslag Project beeldverwerking A study of the 2D SIFT algorithm
 Faculteit Ingenieurswetenschappen 27 januari 2008 Verslag Project beeldverwerking 2007-2008 A study of the 2D SIFT algorithm Dimitri Van Cauwelaert Prof. dr. ir. W. Philips dr. ir. A. Pizurica 2 Content
Faculteit Ingenieurswetenschappen 27 januari 2008 Verslag Project beeldverwerking 2007-2008 A study of the 2D SIFT algorithm Dimitri Van Cauwelaert Prof. dr. ir. W. Philips dr. ir. A. Pizurica 2 Content
Viewpoint Invariant Features from Single Images Using 3D Geometry
 Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Inverse KKT Motion Optimization: A Newton Method to Efficiently Extract Task Spaces and Cost Parameters from Demonstrations
 Inverse KKT Motion Optimization: A Newton Method to Efficiently Extract Task Spaces and Cost Parameters from Demonstrations Peter Englert Machine Learning and Robotics Lab Universität Stuttgart Germany
Inverse KKT Motion Optimization: A Newton Method to Efficiently Extract Task Spaces and Cost Parameters from Demonstrations Peter Englert Machine Learning and Robotics Lab Universität Stuttgart Germany
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Euclidean Reconstruction Independent on Camera Intrinsic Parameters
 Euclidean Reconstruction Independent on Camera Intrinsic Parameters Ezio MALIS I.N.R.I.A. Sophia-Antipolis, FRANCE Adrien BARTOLI INRIA Rhone-Alpes, FRANCE Abstract bundle adjustment techniques for Euclidean
Euclidean Reconstruction Independent on Camera Intrinsic Parameters Ezio MALIS I.N.R.I.A. Sophia-Antipolis, FRANCE Adrien BARTOLI INRIA Rhone-Alpes, FRANCE Abstract bundle adjustment techniques for Euclidean
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
Occlusion Detection of Real Objects using Contour Based Stereo Matching
 Occlusion Detection of Real Objects using Contour Based Stereo Matching Kenichi Hayashi, Hirokazu Kato, Shogo Nishida Graduate School of Engineering Science, Osaka University,1-3 Machikaneyama-cho, Toyonaka,
Occlusion Detection of Real Objects using Contour Based Stereo Matching Kenichi Hayashi, Hirokazu Kato, Shogo Nishida Graduate School of Engineering Science, Osaka University,1-3 Machikaneyama-cho, Toyonaka,
Perception IV: Place Recognition, Line Extraction
 Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
CHAPTER 6 MODIFIED FUZZY TECHNIQUES BASED IMAGE SEGMENTATION
 CHAPTER 6 MODIFIED FUZZY TECHNIQUES BASED IMAGE SEGMENTATION 6.1 INTRODUCTION Fuzzy logic based computational techniques are becoming increasingly important in the medical image analysis arena. The significant
CHAPTER 6 MODIFIED FUZZY TECHNIQUES BASED IMAGE SEGMENTATION 6.1 INTRODUCTION Fuzzy logic based computational techniques are becoming increasingly important in the medical image analysis arena. The significant
Geometry for Computer Vision
 Geometry for Computer Vision Lecture 5b Calibrated Multi View Geometry Per-Erik Forssén 1 Overview The 5-point Algorithm Structure from Motion Bundle Adjustment 2 Planar degeneracy In the uncalibrated
Geometry for Computer Vision Lecture 5b Calibrated Multi View Geometry Per-Erik Forssén 1 Overview The 5-point Algorithm Structure from Motion Bundle Adjustment 2 Planar degeneracy In the uncalibrated
Optic Flow and Basics Towards Horn-Schunck 1
 Optic Flow and Basics Towards Horn-Schunck 1 Lecture 7 See Section 4.1 and Beginning of 4.2 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information.
Optic Flow and Basics Towards Horn-Schunck 1 Lecture 7 See Section 4.1 and Beginning of 4.2 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information.
Determinant of homography-matrix-based multiple-object recognition
 Determinant of homography-matrix-based multiple-object recognition 1 Nagachetan Bangalore, Madhu Kiran, Anil Suryaprakash Visio Ingenii Limited F2-F3 Maxet House Liverpool Road Luton, LU1 1RS United Kingdom
Determinant of homography-matrix-based multiple-object recognition 1 Nagachetan Bangalore, Madhu Kiran, Anil Suryaprakash Visio Ingenii Limited F2-F3 Maxet House Liverpool Road Luton, LU1 1RS United Kingdom
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
A REAL-TIME REGISTRATION METHOD OF AUGMENTED REALITY BASED ON SURF AND OPTICAL FLOW
 A REAL-TIME REGISTRATION METHOD OF AUGMENTED REALITY BASED ON SURF AND OPTICAL FLOW HONGBO LI, MING QI AND 3 YU WU,, 3 Institute of Web Intelligence, Chongqing University of Posts and Telecommunications,
A REAL-TIME REGISTRATION METHOD OF AUGMENTED REALITY BASED ON SURF AND OPTICAL FLOW HONGBO LI, MING QI AND 3 YU WU,, 3 Institute of Web Intelligence, Chongqing University of Posts and Telecommunications,
Towards a visual perception system for LNG pipe inspection
 Towards a visual perception system for LNG pipe inspection LPV Project Team: Brett Browning (PI), Peter Rander (co PI), Peter Hansen Hatem Alismail, Mohamed Mustafa, Joey Gannon Qri8 Lab A Brief Overview
Towards a visual perception system for LNG pipe inspection LPV Project Team: Brett Browning (PI), Peter Rander (co PI), Peter Hansen Hatem Alismail, Mohamed Mustafa, Joey Gannon Qri8 Lab A Brief Overview
Mysteries of Parameterizing Camera Motion - Part 1
 Mysteries of Parameterizing Camera Motion - Part 1 Instructor - Simon Lucey 16-623 - Advanced Computer Vision Apps Today Motivation SO(3) Convex? Exponential Maps SL(3) Group. Adapted from: Computer vision:
Mysteries of Parameterizing Camera Motion - Part 1 Instructor - Simon Lucey 16-623 - Advanced Computer Vision Apps Today Motivation SO(3) Convex? Exponential Maps SL(3) Group. Adapted from: Computer vision:
Factorization Method Using Interpolated Feature Tracking via Projective Geometry
 Factorization Method Using Interpolated Feature Tracking via Projective Geometry Hideo Saito, Shigeharu Kamijima Department of Information and Computer Science, Keio University Yokohama-City, 223-8522,
Factorization Method Using Interpolated Feature Tracking via Projective Geometry Hideo Saito, Shigeharu Kamijima Department of Information and Computer Science, Keio University Yokohama-City, 223-8522,
Correcting Radial Distortion of Cameras With Wide Angle Lens Using Point Correspondences
 Correcting Radial istortion of Cameras With Wide Angle Lens Using Point Correspondences Leonardo Romero and Cuauhtemoc Gomez Universidad Michoacana de San Nicolas de Hidalgo Morelia, Mich., 58000, Mexico
Correcting Radial istortion of Cameras With Wide Angle Lens Using Point Correspondences Leonardo Romero and Cuauhtemoc Gomez Universidad Michoacana de San Nicolas de Hidalgo Morelia, Mich., 58000, Mexico