Bridging the Gap Between Local and Global Approaches for 3D Object Recognition. Isma Hadji G. N. DeSouza
|
|
|
- Candice Newman
- 5 years ago
- Views:
Transcription
1 Bridging the Gap Between Local and Global Approaches for 3D Object Recognition Isma Hadji G. N. DeSouza
2 Outline Introduction Motivation Proposed Methods: 1. LEFT keypoint Detector 2. LGS Feature Descriptor The LEFT-LGS combination Conclusion and Future Work

3 Introduction Object recognition algorithms, usually, rely on three main steps: Descriptors play the most critical step in the Object Recognition Pipeline The techniques adopted for object recognition can be divided into two main categories: Global versus Local


4 Introduction The techniques adopted for 3D object description can be divided into two main categories: Global Descriptors e.g: 1-NN Local Descriptors e.g: 1-NN e.g: CG Algotms.


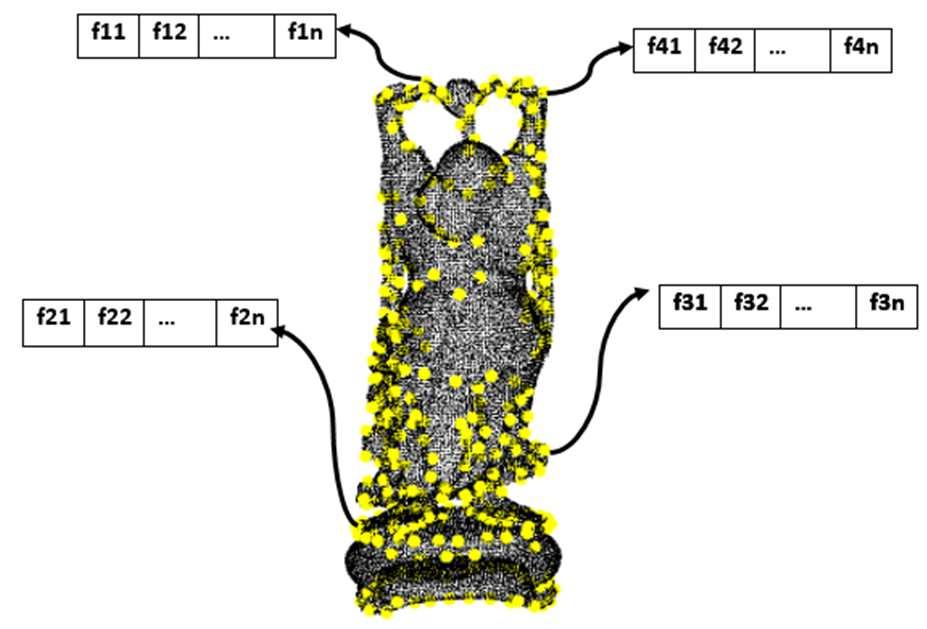
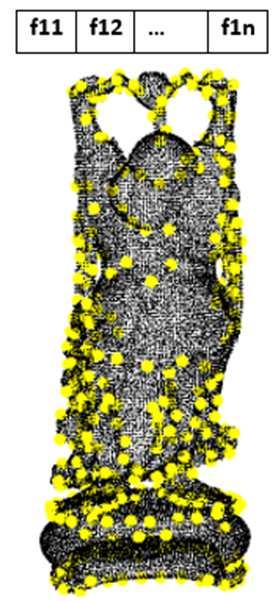
5 Local Approaches

6 Global Approaches
7 Local Versus Global PROS? Local Approaches 1. No segmentation needed. 2. Local descriptors proved to be a more attractive within cluttered/occluded scenes. 3. Straightforward pose estimation. CONS? 1. less discriminating due to the limited scope of the local neighborhood. 2. Additional step required for bad correspondence rejection. PROS? Global Approaches 1. Global descriptors are usually more discriminating as they encode the entire structure of objects. 2. Simple Nearest Neighbor matching is enough to find correspondences. CONS? 1. Requires segmentation for scene 2. Verymuchaffected by occlusions and clutter. 3. Requires complicated algorithms for estimating poses.
8 The Local-to-Global Approach Solution? The Local-to-Global approach Why Local? Local in the sense that each feature vector describes a single keypoint, rather than the entire object Follows the local object recognition pipeline! Why Global? Globalas it looks beyond the local neighborhood (support regions) to detect and describe object Global detection and description

9 Keypoint Detection There are two main motivations for finding keypoints: 1. We want to reduce the computational overhead. 2. We only want to rely on distinctive parts of an object to recognize it. The main challenge when selecting keypoints is to maximize: 1. Distinctiveness. 2. Repeatability.
10 LEFT Detector - Motivation HOW? First estimate some low level features describing each point in the cloud. Traditionally keypoint detectors rely on local threshold-based algorithms. In this research, we question both: 1. The local characteristic of traditional 3D keypoint detectors. 2. The threshold based approaches.
11 LEFT Detector - Algorithm The proposed keypointdetection scheme was inspired on the way animals detect important information. The least frequent a specific shape is, the more representative it is of the object! 1. Low level features describing a 3D cloud of points or mesh are estimated for each point pi in the object. 2. Most similar features are grouped together Quantizing the feature space. 3. The histogram built in the previous step is sorted in ascending order The features are sorted from least to most frequent. 4. Points with least frequent feature occurrence in the object are selected as keypoints!

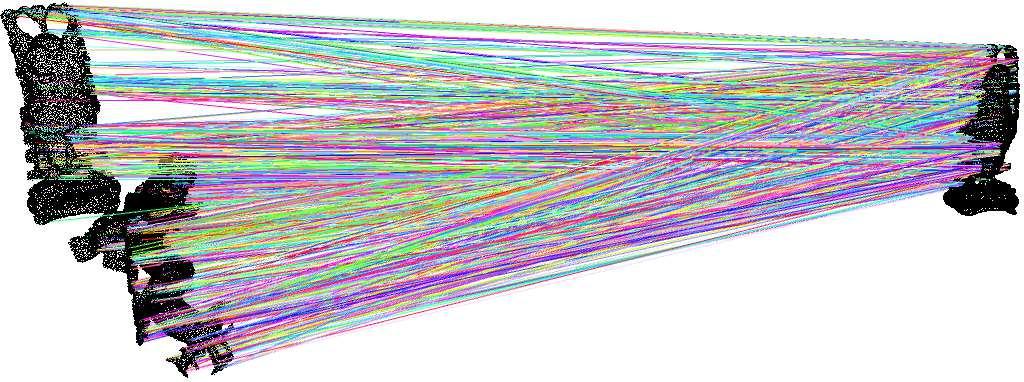
12 LEFT Experimental Evaluation In order to evaluate the repeatability of the keypointsdetected using LEFT we performed experiments using 4 benchmark datasets. a) The Retrieval Dataset b) The Stereo Dataset We also compare our results to 3 SOTA detectors : ISS, LSP and KPQ
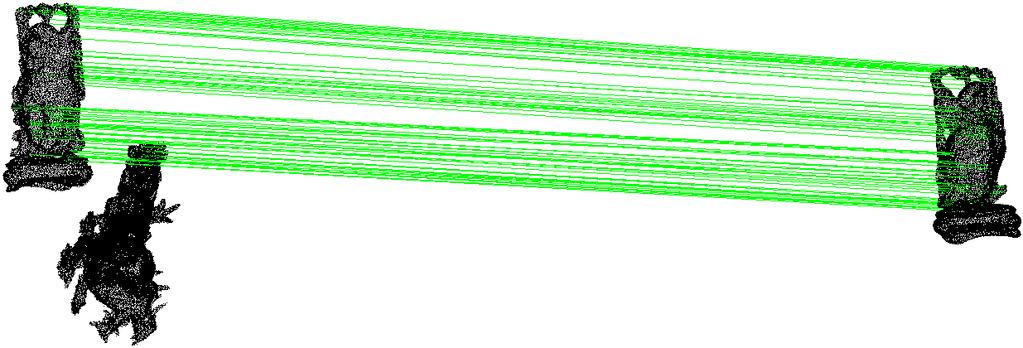
13 LEFT Experimental Evaluation A good keypoint detector is characterized by a high repeatability. The steps followed for measuring repeatability are as follows: 1. Find keypointson both scene and model. 2. Rotate and translate the model based on the ground truth transformation. 3. Find correspondences between detected keypoints in the model and in the scene. 4. Calculate the relative repeatability as the number of correspondences divided by the total number of unoccluded keypoints detected in the model.
14 LEFT Performance LEFT repeatability for variable number of keypoints.
15 Feature Description The role of the descriptors is to encode the geometry of the object. In the case of feature descriptors the main challenges are: 1. Maximizing the discrimination power of the descriptors. 2. Robustness to occlusion and clutter.
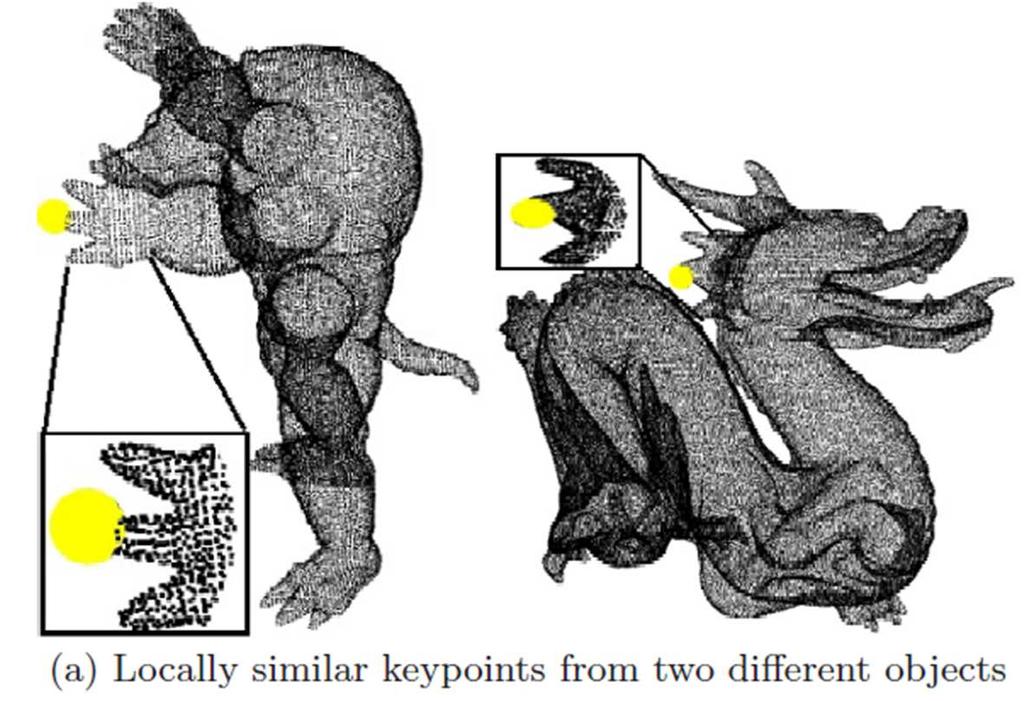
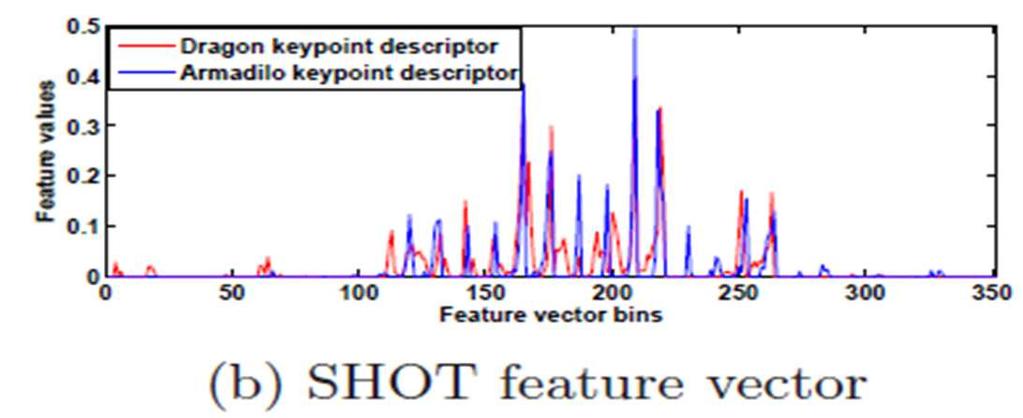
16 LGS Descriptor - Motivation



17 LGS Descriptor - Motivation Dragon GFPFH Feature Vectors Armadillo Partial view of Armadillo
18 LGS Descriptor More specifically, the LGS was built around the following five main ideas: 1. Relying on surface point classification to capture the entire geometry of the object (global property). 2. Describing keypoints(local property), but using both local and global support regions grouped by the same surface class. 3. Using signatures to avoid loss of information and mitigate the effects of occlusion (local property). 4. Using distributions of L2-distances to encode the relationship between keypointand global support regions while increasing robustness to noise by eliminating the use of sensitive features such as surface normal (global property). 5. Using confidence on the relationship above to improve the matching during object recognition (local property).
19 LGS Descriptor Step 1 Point Classification To classify the points we use the radius-based surface classification proposed in the RSD descriptor. The original RSD used both the minimum and maximum radii to classify points as belonging to one of the geometric primitive shapes. In our implementation we chose to classify points from very sharp to very smooth. Why? The ability to find a pre-defined number of classes independently of the object considered i.e. we can vary the number of classes by simply varying the ranges of sharpness and smoothness. Using the minimal radii of each point on the object s surface, the algorithm splits the radii values into N different ranges, representing the N classes of the object s surfaces.
20 LGS Descriptor Step 2 Class Confidence Estimation LGS uses continuous ranges of radii values, therefore fuzzy regions may emerge. Fuzzy regions contain points that could belong to any of the two consecutive ranges Unstable Points Solution? We assign both a class and a membership to the class for each point in the cloud. A low confidence indicates that the point belongs to a fuzzy or noisy region. This determines when the algorithm gives high or low weights to the points used in the next steps.
.")
21 LGS Descriptor Step 3 Signature Construction The LGS descriptor is constructed in a signature-based fashion using: Sorted in D clusters L2 distances and Confidences Concatenated D*N Feature Vector 3 K-neighbors in each one of the N classes (e.g. N=3).


22 LGS Descriptor Step 3 Signature Construction Another example: N=5 classes.
23 LGS Descriptor Step 4 LGS Descriptor Matching The confidences estimated in step 2 are used as weights during the matching stage, when the LGS computes the distance dijbetween a pair of signatures (i, j). The distance between each entry of the pair of signatures is multiplied by the corresponding minimum confidence. This allows LGS to reduce the effect of unstable points located on fuzzy regions. Mathematically, the weighted distance used to compare LGS descriptors is given by:
24 LGS Experimental Evaluation In order to evaluate the robustness of the LGS descriptor we performed experiments using the previous datasets. We also compare our results to SOTA descriptors. 3 local descriptors: (SI, FPFH, SHOT) and 2 Global ones (VFH, GFPFH). A good descriptor is characterized by a high percentage of correct matches. 1. Find and describe all keypointsin both the scene and the model. 2. For each feature vector in the scene find it s nearest neighbor in the model. 3. Find the true correspondences using the provided ground-truth transformation between model and scene. 4. Compare the correspondences from step 2 and step 3 and count total number of true/false matches.
25 LGS Experimental Evaluation Effect of the number of classes N used to construct the signature As expected: 1. A small number of classes does not capture enough of the variations in the structure of these objects. 2. Too many classes also leads to reduced discriminating power. Why? Possible miss-classification error
26 LGS Experimental Evaluation Classification Accuracy Again, as expected addingmore classes caused a drop in the classification accuracy, which ultimately caused a drop in the number of good correspondences.
27 LGS Experimental Evaluation Effect of the number of neighbors in each class Interestingly enough, we can see that the LGS descriptor is not too sensitive to the use of larger neighborhoods. We attribute this to the advantages of the use of a signature-based feature vector.
28 LGS Performance Quantitative Comparison of LGS with respect to Local SOTA 3D descriptors
29 LEFT-LGS Performance Quantitative Comparison of LEFT-LGS with respect to Local SOTA 3D descriptors
30 LEFT-LGS for Object Recognition A good Object Recognition algorithm should have a high TPR and a small FPR. 1. Find keypointsand their corresponding descriptors for both scene and models. 2. Find Potential matches using the a simple Nearest Neighbor matching. 3. Prune correspondences using a Correspondence Grouping algorithm! 4. Count the number of consistent correspondences to decide upon model presence or absence.



31 LEFT-LGS Compared to Local Descriptors LEFT-LGS combined in the object recognition pipeline compared to Local SOTA 3D descriptors
32 LEFT-LGS Compared to Global Descriptors We can compare the performance of LEFT-LGS to global descriptors directly in terms of correctly recognized objects. 1. Segment the scene and describe each segment. 2. For each segment descriptor find its closest model descriptor. 3. Confirm model presence or absence according to the ground truth scene annotation.

33 LEFT-LGS Compared to Global Descriptors LEFT-LGS combined in the object recognition pipeline compared to Global SOTA 3D descriptors.
34 Conclusion and Future Work This work? Built a bridge between Local and Global approaches used the field of Object Recognition. Introduced the concept of detecting keypoints globally LEFT Proposedahybrid descriptor using the advantages of local and global approaches while minimizing the shortcomings of each LGS Future Work? Make the detection stage completely independent of the segmentation step. Address the problem of surface misclassification. Devisea method for automatic selection of the number of classes N.
35 Thank you! QUESTIONS?
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Efficient Surface and Feature Estimation in RGBD
 Efficient Surface and Feature Estimation in RGBD Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RGB-D Workshop on 3D Perception
Efficient Surface and Feature Estimation in RGBD Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RGB-D Workshop on 3D Perception
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Video Google: A Text Retrieval Approach to Object Matching in Videos
 Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
CSC494: Individual Project in Computer Science
 CSC494: Individual Project in Computer Science Seyed Kamyar Seyed Ghasemipour Department of Computer Science University of Toronto kamyar@cs.toronto.edu Abstract One of the most important tasks in computer
CSC494: Individual Project in Computer Science Seyed Kamyar Seyed Ghasemipour Department of Computer Science University of Toronto kamyar@cs.toronto.edu Abstract One of the most important tasks in computer
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Specular 3D Object Tracking by View Generative Learning
 Specular 3D Object Tracking by View Generative Learning Yukiko Shinozuka, Francois de Sorbier and Hideo Saito Keio University 3-14-1 Hiyoshi, Kohoku-ku 223-8522 Yokohama, Japan shinozuka@hvrl.ics.keio.ac.jp
Specular 3D Object Tracking by View Generative Learning Yukiko Shinozuka, Francois de Sorbier and Hideo Saito Keio University 3-14-1 Hiyoshi, Kohoku-ku 223-8522 Yokohama, Japan shinozuka@hvrl.ics.keio.ac.jp
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
TEXTURE CLASSIFICATION METHODS: A REVIEW
 TEXTURE CLASSIFICATION METHODS: A REVIEW Ms. Sonal B. Bhandare Prof. Dr. S. M. Kamalapur M.E. Student Associate Professor Deparment of Computer Engineering, Deparment of Computer Engineering, K. K. Wagh
TEXTURE CLASSIFICATION METHODS: A REVIEW Ms. Sonal B. Bhandare Prof. Dr. S. M. Kamalapur M.E. Student Associate Professor Deparment of Computer Engineering, Deparment of Computer Engineering, K. K. Wagh
3D Object Recognition using Multiclass SVM-KNN
 3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury Problem We address the problem of recognizing 3D objects based on various
3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury Problem We address the problem of recognizing 3D objects based on various
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features
 Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Recognizing Deformable Shapes. Salvador Ruiz Correa Ph.D. UW EE
 Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. UW EE Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes from range data.
Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. UW EE Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes from range data.
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
CS 231A Computer Vision (Fall 2011) Problem Set 4
 Problem Set 4") CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
Recognizing Deformable Shapes. Salvador Ruiz Correa UW Ph.D. Graduate Researcher at Children s Hospital
 Recognizing Deformable Shapes Salvador Ruiz Correa UW Ph.D. Graduate Researcher at Children s Hospital Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable
Recognizing Deformable Shapes Salvador Ruiz Correa UW Ph.D. Graduate Researcher at Children s Hospital Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Toward Part-based Document Image Decoding
 2012 10th IAPR International Workshop on Document Analysis Systems Toward Part-based Document Image Decoding Wang Song, Seiichi Uchida Kyushu University, Fukuoka, Japan wangsong@human.ait.kyushu-u.ac.jp,
2012 10th IAPR International Workshop on Document Analysis Systems Toward Part-based Document Image Decoding Wang Song, Seiichi Uchida Kyushu University, Fukuoka, Japan wangsong@human.ait.kyushu-u.ac.jp,
Fast Image Matching Using Multi-level Texture Descriptor
 Fast Image Matching Using Multi-level Texture Descriptor Hui-Fuang Ng *, Chih-Yang Lin #, and Tatenda Muindisi * Department of Computer Science, Universiti Tunku Abdul Rahman, Malaysia. E-mail: nghf@utar.edu.my
Fast Image Matching Using Multi-level Texture Descriptor Hui-Fuang Ng *, Chih-Yang Lin #, and Tatenda Muindisi * Department of Computer Science, Universiti Tunku Abdul Rahman, Malaysia. E-mail: nghf@utar.edu.my
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES
 IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Sea Turtle Identification by Matching Their Scale Patterns
 Sea Turtle Identification by Matching Their Scale Patterns Technical Report Rajmadhan Ekambaram and Rangachar Kasturi Department of Computer Science and Engineering, University of South Florida Abstract
Sea Turtle Identification by Matching Their Scale Patterns Technical Report Rajmadhan Ekambaram and Rangachar Kasturi Department of Computer Science and Engineering, University of South Florida Abstract
Dietrich Paulus Joachim Hornegger. Pattern Recognition of Images and Speech in C++
 Dietrich Paulus Joachim Hornegger Pattern Recognition of Images and Speech in C++ To Dorothea, Belinda, and Dominik In the text we use the following names which are protected, trademarks owned by a company
Dietrich Paulus Joachim Hornegger Pattern Recognition of Images and Speech in C++ To Dorothea, Belinda, and Dominik In the text we use the following names which are protected, trademarks owned by a company
Image Processing. Image Features
 Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Lecture 9: Hough Transform and Thresholding base Segmentation
 #1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
#1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
PROBLEM FORMULATION AND RESEARCH METHODOLOGY
 PROBLEM FORMULATION AND RESEARCH METHODOLOGY ON THE SOFT COMPUTING BASED APPROACHES FOR OBJECT DETECTION AND TRACKING IN VIDEOS CHAPTER 3 PROBLEM FORMULATION AND RESEARCH METHODOLOGY The foregoing chapter
PROBLEM FORMULATION AND RESEARCH METHODOLOGY ON THE SOFT COMPUTING BASED APPROACHES FOR OBJECT DETECTION AND TRACKING IN VIDEOS CHAPTER 3 PROBLEM FORMULATION AND RESEARCH METHODOLOGY The foregoing chapter
Classification Algorithms in Data Mining
 August 9th, 2016 Suhas Mallesh Yash Thakkar Ashok Choudhary CIS660 Data Mining and Big Data Processing -Dr. Sunnie S. Chung Classification Algorithms in Data Mining Deciding on the classification algorithms
August 9th, 2016 Suhas Mallesh Yash Thakkar Ashok Choudhary CIS660 Data Mining and Big Data Processing -Dr. Sunnie S. Chung Classification Algorithms in Data Mining Deciding on the classification algorithms
A Keypoint Descriptor Inspired by Retinal Computation
 A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
Designing Applications that See Lecture 7: Object Recognition
 stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
Extracting Spatio-temporal Local Features Considering Consecutiveness of Motions
 Extracting Spatio-temporal Local Features Considering Consecutiveness of Motions Akitsugu Noguchi and Keiji Yanai Department of Computer Science, The University of Electro-Communications, 1-5-1 Chofugaoka,
Extracting Spatio-temporal Local Features Considering Consecutiveness of Motions Akitsugu Noguchi and Keiji Yanai Department of Computer Science, The University of Electro-Communications, 1-5-1 Chofugaoka,
Recognizing Deformable Shapes. Salvador Ruiz Correa (CSE/EE576 Computer Vision I)
") Recognizing Deformable Shapes Salvador Ruiz Correa (CSE/EE576 Computer Vision I) Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes
Recognizing Deformable Shapes Salvador Ruiz Correa (CSE/EE576 Computer Vision I) Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Introduction to SLAM Part II. Paul Robertson
 Introduction to SLAM Part II Paul Robertson Localization Review Tracking, Global Localization, Kidnapping Problem. Kalman Filter Quadratic Linear (unless EKF) SLAM Loop closing Scaling: Partition space
Introduction to SLAM Part II Paul Robertson Localization Review Tracking, Global Localization, Kidnapping Problem. Kalman Filter Quadratic Linear (unless EKF) SLAM Loop closing Scaling: Partition space
Recognizing Deformable Shapes. Salvador Ruiz Correa Ph.D. Thesis, Electrical Engineering
 Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. Thesis, Electrical Engineering Basic Idea Generalize existing numeric surface representations for matching 3-D objects to the problem of identifying
Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. Thesis, Electrical Engineering Basic Idea Generalize existing numeric surface representations for matching 3-D objects to the problem of identifying
Learning to Recognize Faces in Realistic Conditions
 000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 045 046 047 048 049 050
000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 045 046 047 048 049 050
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Classification and Detection in Images. D.A. Forsyth
 Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Object of interest discovery in video sequences
 Object of interest discovery in video sequences A Design Project Report Presented to Engineering Division of the Graduate School Of Cornell University In Partial Fulfillment of the Requirements for the
Object of interest discovery in video sequences A Design Project Report Presented to Engineering Division of the Graduate School Of Cornell University In Partial Fulfillment of the Requirements for the
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi
 Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Trademark Matching and Retrieval in Sport Video Databases
 Trademark Matching and Retrieval in Sport Video Databases Andrew D. Bagdanov, Lamberto Ballan, Marco Bertini and Alberto Del Bimbo {bagdanov, ballan, bertini, delbimbo}@dsi.unifi.it 9th ACM SIGMM International
Trademark Matching and Retrieval in Sport Video Databases Andrew D. Bagdanov, Lamberto Ballan, Marco Bertini and Alberto Del Bimbo {bagdanov, ballan, bertini, delbimbo}@dsi.unifi.it 9th ACM SIGMM International
Gender Classification
 Gender Classification Thomas Witzig Master student, 76128 Karlsruhe, Germany, Computer Vision for Human-Computer Interaction Lab KIT University of the State of Baden-Wuerttemberg and National Research
Gender Classification Thomas Witzig Master student, 76128 Karlsruhe, Germany, Computer Vision for Human-Computer Interaction Lab KIT University of the State of Baden-Wuerttemberg and National Research
/10/$ IEEE 4048
 21 IEEE International onference on Robotics and Automation Anchorage onvention District May 3-8, 21, Anchorage, Alaska, USA 978-1-4244-54-4/1/$26. 21 IEEE 448 Fig. 2: Example keyframes of the teabox object.
21 IEEE International onference on Robotics and Automation Anchorage onvention District May 3-8, 21, Anchorage, Alaska, USA 978-1-4244-54-4/1/$26. 21 IEEE 448 Fig. 2: Example keyframes of the teabox object.
Articulated Pose Estimation with Flexible Mixtures-of-Parts
 Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Topological Mapping. Discrete Bayes Filter
 Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
CHAPTER 3 ADAPTIVE DECISION BASED MEDIAN FILTER WITH FUZZY LOGIC
 48 CHAPTER 3 ADAPTIVE DECISION BASED MEDIAN ILTER WITH UZZY LOGIC In the previous algorithm, the noisy pixel is replaced by trimmed mean value, when all the surrounding pixels of noisy pixel are noisy.
48 CHAPTER 3 ADAPTIVE DECISION BASED MEDIAN ILTER WITH UZZY LOGIC In the previous algorithm, the noisy pixel is replaced by trimmed mean value, when all the surrounding pixels of noisy pixel are noisy.
Improved Coding for Image Feature Location Information
 Improved Coding for Image Feature Location Information Sam S. Tsai, David Chen, Gabriel Takacs, Vijay Chandrasekhar Mina Makar, Radek Grzeszczuk, and Bernd Girod Department of Electrical Engineering, Stanford
Improved Coding for Image Feature Location Information Sam S. Tsai, David Chen, Gabriel Takacs, Vijay Chandrasekhar Mina Makar, Radek Grzeszczuk, and Bernd Girod Department of Electrical Engineering, Stanford
Content based Image Retrieval Using Multichannel Feature Extraction Techniques
 ISSN 2395-1621 Content based Image Retrieval Using Multichannel Feature Extraction Techniques #1 Pooja P. Patil1, #2 Prof. B.H. Thombare 1 patilpoojapandit@gmail.com #1 M.E. Student, Computer Engineering
ISSN 2395-1621 Content based Image Retrieval Using Multichannel Feature Extraction Techniques #1 Pooja P. Patil1, #2 Prof. B.H. Thombare 1 patilpoojapandit@gmail.com #1 M.E. Student, Computer Engineering
Partial Shape Matching using Transformation Parameter Similarity - Additional Material
 Volume xx (y), Number z, pp. 7 Partial Shape Matching using Transformation Parameter Similarity - Additional Material paper66. An Example for Local Contour Descriptors As mentioned in Section 4 of the
Volume xx (y), Number z, pp. 7 Partial Shape Matching using Transformation Parameter Similarity - Additional Material paper66. An Example for Local Contour Descriptors As mentioned in Section 4 of the
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
TA Section 7 Problem Set 3. SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)
 Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)") TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Determinant of homography-matrix-based multiple-object recognition
 Determinant of homography-matrix-based multiple-object recognition 1 Nagachetan Bangalore, Madhu Kiran, Anil Suryaprakash Visio Ingenii Limited F2-F3 Maxet House Liverpool Road Luton, LU1 1RS United Kingdom
Determinant of homography-matrix-based multiple-object recognition 1 Nagachetan Bangalore, Madhu Kiran, Anil Suryaprakash Visio Ingenii Limited F2-F3 Maxet House Liverpool Road Luton, LU1 1RS United Kingdom
Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki
 Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki 2011 The MathWorks, Inc. 1 Today s Topics Introduction Computer Vision Feature-based registration Automatic image registration Object recognition/rotation
Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki 2011 The MathWorks, Inc. 1 Today s Topics Introduction Computer Vision Feature-based registration Automatic image registration Object recognition/rotation
Grammar Rule Extraction and Transfer in Buildings
 Grammar Rule Extraction and Transfer in Buildings Asad Khalid Ismail Lahore University of Management Sciences Sector U, DHA, Lahore 13100004@lums.edu.pk Zuha Agha Lahore University of Management Sciences
Grammar Rule Extraction and Transfer in Buildings Asad Khalid Ismail Lahore University of Management Sciences Sector U, DHA, Lahore 13100004@lums.edu.pk Zuha Agha Lahore University of Management Sciences
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
3D Keypoints Detection for Objects Recognition
 3D Keypoints Detection for Objects Recognition Ayet Shaiek 1, and Fabien Moutarde 1 1 Robotics laboratory (CAOR) Mines ParisTech 60 Bd St Michel, F-75006 Paris, France Abstract - In this paper, we propose
3D Keypoints Detection for Objects Recognition Ayet Shaiek 1, and Fabien Moutarde 1 1 Robotics laboratory (CAOR) Mines ParisTech 60 Bd St Michel, F-75006 Paris, France Abstract - In this paper, we propose
Scalable Object Classification using Range Images
 Scalable Object Classification using Range Images Eunyoung Kim and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California 1 What is a Range Image? Depth measurement
Scalable Object Classification using Range Images Eunyoung Kim and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California 1 What is a Range Image? Depth measurement
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
CAP 6412 Advanced Computer Vision
 CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Det De e t cting abnormal event n s Jaechul Kim
 Detecting abnormal events Jaechul Kim Purpose Introduce general methodologies used in abnormality detection Deal with technical details of selected papers Abnormal events Easy to verify, but hard to describe
Detecting abnormal events Jaechul Kim Purpose Introduce general methodologies used in abnormality detection Deal with technical details of selected papers Abnormal events Easy to verify, but hard to describe
Why study Computer Vision?
 Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what)
Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what)
Short Survey on Static Hand Gesture Recognition
 Short Survey on Static Hand Gesture Recognition Huu-Hung Huynh University of Science and Technology The University of Danang, Vietnam Duc-Hoang Vo University of Science and Technology The University of
Short Survey on Static Hand Gesture Recognition Huu-Hung Huynh University of Science and Technology The University of Danang, Vietnam Duc-Hoang Vo University of Science and Technology The University of
Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping
 Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Motivation: Analogy to Documents O f a l l t h e s e
Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Motivation: Analogy to Documents O f a l l t h e s e
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Clustering in Registration of 3D Point Clouds
 Sergey Arkhangelskiy 1 Ilya Muchnik 2 1 Google Moscow 2 Rutgers University, New Jersey, USA International Workshop Clusters, orders, trees: Methods and applications in honor of Professor Boris Mirkin December
Sergey Arkhangelskiy 1 Ilya Muchnik 2 1 Google Moscow 2 Rutgers University, New Jersey, USA International Workshop Clusters, orders, trees: Methods and applications in honor of Professor Boris Mirkin December
Bundling Features for Large Scale Partial-Duplicate Web Image Search
 Bundling Features for Large Scale Partial-Duplicate Web Image Search Zhong Wu, Qifa Ke, Michael Isard, and Jian Sun Microsoft Research Abstract In state-of-the-art image retrieval systems, an image is
Bundling Features for Large Scale Partial-Duplicate Web Image Search Zhong Wu, Qifa Ke, Michael Isard, and Jian Sun Microsoft Research Abstract In state-of-the-art image retrieval systems, an image is
Implementing the Scale Invariant Feature Transform(SIFT) Method
 Method") Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction
 Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction Chieh-Chih Wang and Ko-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction Chieh-Chih Wang and Ko-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
Clustering Lecture 4: Density-based Methods
 Clustering Lecture 4: Density-based Methods Jing Gao SUNY Buffalo 1 Outline Basics Motivation, definition, evaluation Methods Partitional Hierarchical Density-based Mixture model Spectral methods Advanced
Clustering Lecture 4: Density-based Methods Jing Gao SUNY Buffalo 1 Outline Basics Motivation, definition, evaluation Methods Partitional Hierarchical Density-based Mixture model Spectral methods Advanced
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Basic Problem Addressed. The Approach I: Training. Main Idea. The Approach II: Testing. Why a set of vocabularies?
 Visual Categorization With Bags of Keypoints. ECCV,. G. Csurka, C. Bray, C. Dance, and L. Fan. Shilpa Gulati //7 Basic Problem Addressed Find a method for Generic Visual Categorization Visual Categorization:
Visual Categorization With Bags of Keypoints. ECCV,. G. Csurka, C. Bray, C. Dance, and L. Fan. Shilpa Gulati //7 Basic Problem Addressed Find a method for Generic Visual Categorization Visual Categorization:
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Deep Learning for Robust Normal Estimation in Unstructured Point Clouds. Alexandre Boulch. Renaud Marlet
 Deep Learning for Robust Normal Estimation in Unstructured Point Clouds Alexandre Boulch Renaud Marlet Normal estimation in point clouds Normal: 3D normalized vector At each point: local orientation of
Deep Learning for Robust Normal Estimation in Unstructured Point Clouds Alexandre Boulch Renaud Marlet Normal estimation in point clouds Normal: 3D normalized vector At each point: local orientation of
DA Progress report 2 Multi-view facial expression. classification Nikolas Hesse
 DA Progress report 2 Multi-view facial expression classification 16.12.2010 Nikolas Hesse Motivation Facial expressions (FE) play an important role in interpersonal communication FE recognition can help
DA Progress report 2 Multi-view facial expression classification 16.12.2010 Nikolas Hesse Motivation Facial expressions (FE) play an important role in interpersonal communication FE recognition can help
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Elsevier Editorial System(tm) for Information Sciences Manuscript Draft
 for Information Sciences Manuscript Draft") Elsevier Editorial System(tm) for Information Sciences Manuscript Draft Manuscript Number: INS-D-13-1432R3 Title: A Novel Local Surface Feature for 3D Object Recognition under Clutter and Occlusion Article
Elsevier Editorial System(tm) for Information Sciences Manuscript Draft Manuscript Number: INS-D-13-1432R3 Title: A Novel Local Surface Feature for 3D Object Recognition under Clutter and Occlusion Article