Perception IV: Place Recognition, Line Extraction
|
|
|
- Augusta McDonald
- 5 years ago
- Views:
Transcription

1 Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1
2 Outline of Today s lecture Place recognition using Vocabulary Tree Line extraction from images Line extraction from laser data Introduction 2
3 K-means clustering - Review Minimizes the sum of squared Euclidean distances between points x i and their nearest cluster centers m 2 k ( xi D( X, M ) m cluster k point i in cluster k k ) Algorithm: Randomly initialize K cluster centers Iterate until convergence: Assign each data point to the nearest center Recompute each cluster center as the mean of all points assigned to it
4 K-means clustering - Demo Source:

5 Feature-based object recognition - Review Q: Is this Book present in the Scene? Look for corresponding matches Most of the Book s keypoints are present in the Scene A: The Book is present in the Scene





6 Taking this a step further Find an object in an image? Find an object in multiple images? Find multiple objects in multiple images As the number of images increases, feature based object recognition becomes computationaly unfeasable?

7 Fast visual search Query in a database of 110 million images in 5.8 seconds Video Google, Sivic and Zisserman, ICCV 2003 Scalable Recognition with a Vocabulary Tree, Nister and Stewenius, CVPR 2006.


8 How much is 110 million images? Slide

9 How much is 110 million images? Slide

10 How much is 110 million images?
11 Bag of Words Extension to scene/place recognition: Is this image in my database? Robot: Have I been to this place before? Use analogies from text retrieval: Visual Words Vocabulary of Visual Words Bag of Words (BOW) approach
12 Indexing local features With potentially thousands of features per image, and hundreds to millions of images to search, how to efficiently find those that are relevant to a new image? Quantize/cluster the descriptors into `visual words Inverted file indexing schemes

13 Indexing local features: inverted file text For text documents, an efficient way to find all pages on which a word occurs is to use an index We want to find all images in which a feature occurs To use this idea, we ll need to map our features to visual words


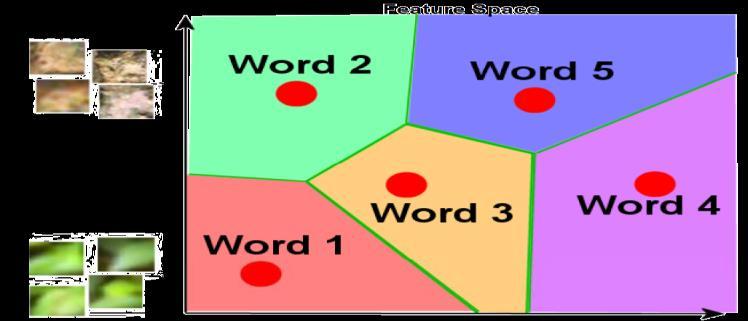
14 Building the Visual Vocabulary Extract Features Image Collection Cluster Descriptors Descriptors space Examples of Visual Words:


15 Video Google These features map to the same visual word Video Google [J.Sivic and A. Zisserman, ICCV 2003] Demo:







16 Video Google System 1. Collect all words within query region 2. Inverted file index to find relevant frames 3. Compare word counts 4. Spatial verification Query region Sivic & Zisserman, ICCV 2003 Demo online at : Retrieved frames
17 Efficient Place/Object Recognition We can describe a scene as a collection of words and look up in the database for images with a similar collection of words What if we need to find an object/scene in a database of millions of images? Build Vocabulary Tree via hierarchical clustering Use the Inverted File system for efficient indexing [Nister and Stewénius, CVPR 2006]

18 Recognition with K-tree Populate the descriptor space

19 Recognition with K-tree Populate the descriptor space

20 Recognition with K-tree Populate the descriptor space

21 Recognition with K-tree Populate the descriptor space

22 Recognition with K-tree Populate the descriptor space

23 Recognition with K-tree Populate the descriptor space
24
25
26
27
28
29
30
31
32
33
34
35
36 Building the inverted file index
37 Building the inverted file index
38 Building the inverted file index
39 Building the inverted file index





40 Building the inverted file index

41 Inverted File index Inverted File DB lists all possible visual words Each word points to a list of images where this word occurs Voting array: has as many cells as the images in the DB each word in query image, votes for an image Query image Q Visual words in Q Inverted File DB Visual word Voting Array for Q List of images that this word appears in
![FABMAP [Cummins and Newman IJRR 2011] Place recognition for robot localization Use training images to build the BoW database Probabilistic model of the world At a new frame, compute: P(being](/docs-images/96/127789249/images/42-2.jpg "at a known place) P(being at a new place) Captures the dependencies of words to distinguish the most characteristic structure of each scene (using the Chow-Liu tree) Binaries available")
42 FABMAP [Cummins and Newman IJRR 2011] Place recognition for robot localization Use training images to build the BoW database Probabilistic model of the world At a new frame, compute: P(being at a known place) P(being at a new place) Captures the dependencies of words to distinguish the most characteristic structure of each scene (using the Chow-Liu tree) Binaries available online

43 FABMAP example robots.ox.ac.uk/~mjc/appearance_based_results.htm p = probability of images coming from the same place

44 FABMAP example robots.ox.ac.uk/~mjc/appearance_based_results.htm p = probability of images coming from the same place
45 Robust object/scene recognition Visual Vocabulary holds appearance information but discards the spatial relationships between features Two images with the same features shuffled around in the image will be a 100% match when using only appearance information. If different arrangements of the same features are expected then one might use geometric verification Test the k most similar images to the query image for geometric consistency (e.g. using RANSAC) Further reading (out of the scope of this course): [Cummins and Newman, IJRR 2011] [Stewénius et al, ECCV 2012]
46 Outline of Today s lecture Place recognition using Vocabulary Tree Line extraction from images Line extraction from laser data Introduction 46

47 Line extraction Supose that you have been commissioned to implement a lane detection for a car driving-assistance system. How would you proceed?
48 Line extraction How do we extract lines from edges?
49 Two popular line extraction algorithms Hough transform (used also to detect circles, ellipses, and any sort of shape) RANSAC (Random Sample Consensus)
50 Hough-Transform Finds lines from a binary edge image using a voting procedure The voting space (or accumulator) is called Hough space 1. P. Hough, Machine Analysis of Bubble Chamber Pictures, Proc. Int. Conf. High Energy Accelerators and Instrumentation, J. Richard, O. Duda, P.E. Hart (April 1971). "Use of the Hough Transformation to Detect Lines and Curves in Pictures". Artificial Intelligence Center (SRI International)
51 Hough-Transform Let x 0, y 0 be an image point We can represent all the lines passing through it by y 0 = mx 0 + b The Hough transform works by parameterizing this expression in terms of m and b: b = x 0 m + y 0 This is represented by a line in the Hough space x 0, y 0 Every point votes a line in the Hough space b = x 0 m + y 0
52 Hough-Transform Let x 0, y 0 be an image point We can represent all the lines passing through it by y 0 = mx 0 + b The Hough transform works by parameterizing this expression in terms of m and b: b = x 0 m + y 0 This is represented by a line in the Hough space x 1, y 1 b = x 1 m + y 1 x 0, y 0 b = x 0 m + y 0 Every point votes a line in the Hough space
53 Hough-Transform How do we determine the line (b, m ) that contains both x 0, y 0 and x 1, y 1? It is the intersection of the lines b = x 0 m + y 0 and b = x 1 m + y 1 x 1, y 1 b = x 1 m + y 1 x 0, y 0 b = x 0 m + y 0 Every point votes a line in the Hough space b m
54 Hough-Transform x 1, y 1 b = x 1 m + y 1 x 0, y 0 b = x 0 m + y 0 Every point votes a line in the Hough space Each point in image space, votes for line-parameters in Hough parameter space
55 Hough-Transform Problems with the (m, b) space: Unbounded parameter domain m, b can assume any value in [, + ]
56 Hough-Transform Problems with the (m, b) space: Unbounded parameter domain m, b can assume any value in [, + ] Alternative line representation: polar representation x cos y sin
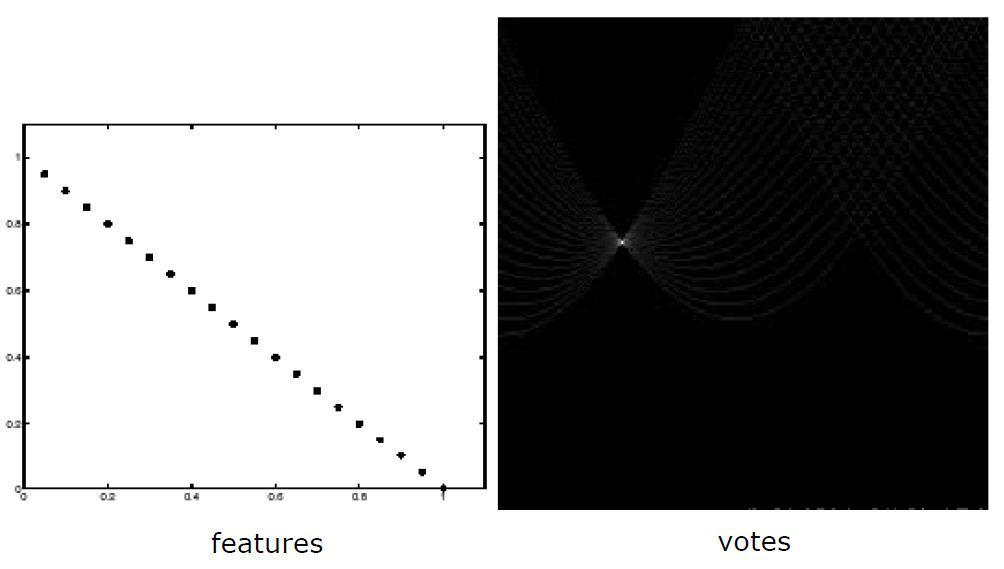
57 Hough-Transform Each point in image space maps to a sinusoid in the parameter space (ρ, θ) x cos y sin x = 0 y = 180 = 0 = 100
 x cos y sin x = 0 y = 180 = 0 =")
58 Hough-Transform Each point in image space maps to a sinusoid in the parameter space (ρ, θ) x cos y sin x = 0 y = 180 = 0 = 100
 in the image for all θ in [0 : step : 180] Compute ρ = x cos θ + y sin θ H(θ, ρ) = H(θ, ρ) + 1 end end 3.")
59 Hough-Transform 1. Initialize: set all accumulator cells to zero 2. for each edge point (x,y) in the image for all θ in [0 : step : 180] Compute ρ = x cos θ + y sin θ H(θ, ρ) = H(θ, ρ) + 1 end end 3. Find the values of (θ, ρ) where H(θ, ρ) is a local maximum 4. The detected line in the image is given by: ρ = x cos θ + y sin θ
60 Examples
61 Examples Hough Transform Notice, however, that the Hough only find the parameters of the line, not the ends of it. How do you find them?
62 Examples
63 Examples
; however, this reduces the accuracy of the line parameters")
64 Problems Effects of noise: peaks get fuzzy and hard to locate How to overcome this? Increase bin size (increase resolution of the Hough space); however, this reduces the accuracy of the line parameters Convolute the output with a box filter; why?
65 RANSAC (RAndom SAmple Consensus) It has become the standard method for model fitting in the presence of outliers (very noisy points or wrong data) It can be applied to line fitting but also to thousands of different problems where the goal is to estimate the parameters of a model from noisy data (e.g., camera calibration, structure from motion, DLT, homography, etc.) Let s now focus on line extraction M. A.Fischler and R. C.Bolles. Random sample consensus: A paradigm for model fitting with applicatlons to image analysis and automated cartography. Graphics and Image Processing, 24(6): , 1981.
66 RANSAC
67 RANSAC Select sample of 2 points at random
68 RANSAC Select sample of 2 points at random Calculate model parameters that fit the data in the sample
69 RANSAC Select sample of 2 points at random Calculate model parameters that fit the data in the sample Calculate error function for each data point
70 RANSAC Select sample of 2 points at random Calculate model parameters that fit the data in the sample Calculate error function for each data point Select data that supports current hypothesis
71 RANSAC Select sample of 2 points at random Calculate model parameters that fit the data in the sample Calculate error function for each data point Select data that supports current hypothesis Repeat sampling
72 RANSAC Select sample of 2 points at random Calculate model parameters that fit the data in the sample Calculate error function for each data point Select data that supports current hypothesis Repeat sampling
73 RANSAC Set with the maximum number of inliers obtained after k iterations
74 RANSAC How many iterations does RANSAC need? Ideally: check all possible combinations of 2 points in a dataset of N points. Number of all pairwise combinations: N(N-1)/2 computationally unfeasible if N is too large. example: edge points need to check all *9999/2= 50 million combinations! Do we really need to check all combinations or can we stop after some iterations? Checking a subset of combinations is enough if we have a rough estimate of the percentage of inliers in our dataset This can be done in a probabilistic way
75 RANSAC How many iterations does RANSAC need? w := percentage of inliers: number of inliers/n N := total number of data points w : fraction of inliers in the dataset w = P(selecting an inlier-point out of the dataset) Let p := P(selecting a set of points free of outliers) Assumption: the 2 points necessary to estimate a line are selected independently w 2 = P(both selected points are inliers) 1-w 2 = P(at least one of these two points is an outlier) Let k := no. RANSAC iterations executed so far ( 1-w 2 ) k = P(RANSAC never selects two points that are both inliers) 1-p = ( 1-w 2 ) k and therefore : k log(1 log(1 p) ) 2 w
76 RANSAC How many iterations does RANSAC need? The number of iterations k is k log(1 log(1 p) ) 2 w knowing the fraction of inliers w, after k RANSAC iterations we will have a probability p of finding a set of points free of outliers Example: if we want a probability of success p=99% and we know that w=50% k=16 iterations these are dramatically fewer than the number of all possible combinations! Notice that the number of points does not influence the estimated number of iterations, only w does! In practice we need only a rough estimate of w. More advanced variants of RANSAC estimate the fraction of inliers and adaptively change it on every iteration
77 RANSAC - Algorithm Let A be a set of N points 1. repeat 2. Randomly select a sample of 2 points from A 3. Fit a line through the 2 points 4. Compute the distances of all other points to this line 5. Construct the inlier set (i.e. count the number of points whose distance < d) 6. Store these inliers 7. until maximum number of iterations k reached 8. The set with the maximum number of inliers is chosen as a solution to the problem
 Can be applied in general to any problem where the goal is to identify the inliers which satisfy a predefined model.")

78 RANSAC - Applications RANSAC = RANdom SAmple Consensus. A generic & robust fitting algorithm of models in the presence of outliers (i.e. points which do not satisfy a model) Can be applied in general to any problem where the goal is to identify the inliers which satisfy a predefined model.? Typical applications in robotics are: line extraction from 2D range data, plane extraction from 3D data, feature matching, structure from motion, camera calibration, homography estimation, etc. RANSAC is iterative and non-deterministic the probability to find a set free of outliers increases as more iterations are used Drawback: a non-deterministic method, results are different between runs.
79 Outline of Today s lecture Place recognition using Vocabulary Tree Line extraction from images Line extraction from laser data RANSAC (same as for line dtection from images) Hough (same as for line dtection from images) Split and Merge (only laser scans: uses sequential order of scan data) Line regression (only laser scans: uses sequential order of scan data) Introduction 79
80 Algorithm 1: Split-and-Merge (standard) Popular algorithm, originates from Computer Vision. A recursive procedure of fitting and splitting. A slightly different version, called Iterative end-point-fit, simply connects the end points for line fitting. Let S be the set of all data points Split Fit a line to points in current set S Find the most distant point to the line If distance > threshold split set & repeat with left and right point sets Merge If two consecutive segments are collinear enough, obtain the common line and find the most distant point If distance <= threshold, merge both segments Introduction 80
81 Algorithm 1: Split-and-Merge (iterative end-point-fit) Iterative end-point-fit: simply connects the end points for line fitting
82 Algorithm 1: Split-and-Merge (iterative end-point-fit) Iterative end-point-fit: simply connects the end points for line fitting Split
83 Algorithm 1: Split-and-Merge (iterative end-point-fit) Iterative end-point-fit: simply connects the end points for line fitting Split Split Split
84 Algorithm 1: Split-and-Merge (iterative end-point-fit) Iterative end-point-fit: simply connects the end points for line fitting Split Split No more Splits Split
85 Algorithm 1: Split-and-Merge (iterative end-point-fit) Iterative end-point-fit: simply connects the end points for line fitting Split Split Merge No more Splits Split
86 Algorithm 2: Line-Regression Sliding window of size N f points Fit line-segment to all points in each window Then adjacent segments are merged if their line parameters are close Line-Regression Initialize sliding window size N f Fit a line to every N f consecutive points (i.e. in each window) Merge overlapping line segments + recompute line parameters for each segment N f = 3 Introduction 86
87 Algorithm 2: Line-Regression Sliding window of size N f points Fit line-segment to all points in each window Then adjacent segments are merged if their line parameters are close Line-Regression Initialize sliding window size N f Fit a line to every N f consecutive points (i.e. in each window) Merge overlapping line segments + recompute line parameters for each segment N f = 3
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza http://rpg.ifi.uzh.ch/ 1 Lab exercise today replaced by Deep Learning Tutorial by Antonio Loquercio Room
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza http://rpg.ifi.uzh.ch/ 1 Lab exercise today replaced by Deep Learning Tutorial by Antonio Loquercio Room
Uncertainties: Representation and Propagation & Line Extraction from Range data
 41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
Lecture 12 Recognition. Davide Scaramuzza
 Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Hough Transform and RANSAC
 CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Keypoint-based Recognition and Object Search
 03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Lecture 8 Fitting and Matching
 Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
EECS 442 Computer vision. Fitting methods
 EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Lecture 9 Fitting and Matching
 Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
10/03/11. Model Fitting. Computer Vision CS 143, Brown. James Hays. Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem
 10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
Fitting. Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! EECS Fall 2014! Foundations of Computer Vision!
! web.eecs.umich.edu/~jjcorso/t/598f14!! EECS Fall 2014! Foundations of Computer Vision!") Fitting EECS 598-08 Fall 2014! Foundations of Computer Vision!! Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! Readings: FP 10; SZ 4.3, 5.1! Date: 10/8/14!! Materials on these
Fitting EECS 598-08 Fall 2014! Foundations of Computer Vision!! Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! Readings: FP 10; SZ 4.3, 5.1! Date: 10/8/14!! Materials on these
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Model Fitting: The Hough transform I
 Model Fitting: The Hough transform I Guido Gerig, CS6640 Image Processing, Utah Credit: Svetlana Lazebnik (Computer Vision UNC Chapel Hill, 2008) Fitting Parametric Models: Beyond Lines Choose a parametric
Model Fitting: The Hough transform I Guido Gerig, CS6640 Image Processing, Utah Credit: Svetlana Lazebnik (Computer Vision UNC Chapel Hill, 2008) Fitting Parametric Models: Beyond Lines Choose a parametric
Feature Matching + Indexing and Retrieval
 CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
Homography estimation
 RANSAC continued Homography estimation x w? ~x img H~x w Homography estimation? x img ~x w = H 1 ~x img Homography estimation (0,0) (1,0) (6.4,2.8) (8.0,2.9) (5.6, 4.0) (7.8, 4.2) (0,1) (1,1) Ah =0s.tkhk
RANSAC continued Homography estimation x w? ~x img H~x w Homography estimation? x img ~x w = H 1 ~x img Homography estimation (0,0) (1,0) (6.4,2.8) (8.0,2.9) (5.6, 4.0) (7.8, 4.2) (0,1) (1,1) Ah =0s.tkhk
An Extended Line Tracking Algorithm
 An Extended Line Tracking Algorithm Leonardo Romero Muñoz Facultad de Ingeniería Eléctrica UMSNH Morelia, Mich., Mexico Email: lromero@umich.mx Moises García Villanueva Facultad de Ingeniería Eléctrica
An Extended Line Tracking Algorithm Leonardo Romero Muñoz Facultad de Ingeniería Eléctrica UMSNH Morelia, Mich., Mexico Email: lromero@umich.mx Moises García Villanueva Facultad de Ingeniería Eléctrica
RANSAC and some HOUGH transform
 RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
Straight Lines and Hough
 09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
RANSAC: RANdom Sampling And Consensus
 CS231-M RANSAC: RANdom Sampling And Consensus Roland Angst rangst@stanford.edu www.stanford.edu/~rangst CS231-M 2014-04-30 1 The Need for RANSAC Why do I need RANSAC? I know robust statistics! Robust Statistics
CS231-M RANSAC: RANdom Sampling And Consensus Roland Angst rangst@stanford.edu www.stanford.edu/~rangst CS231-M 2014-04-30 1 The Need for RANSAC Why do I need RANSAC? I know robust statistics! Robust Statistics
Robot localization method based on visual features and their geometric relationship
 , pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
, pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
Computer Vision 6 Segmentation by Fitting
 Computer Vision 6 Segmentation by Fitting MAP-I Doctoral Programme Miguel Tavares Coimbra Outline The Hough Transform Fitting Lines Fitting Curves Fitting as a Probabilistic Inference Problem Acknowledgements:
Computer Vision 6 Segmentation by Fitting MAP-I Doctoral Programme Miguel Tavares Coimbra Outline The Hough Transform Fitting Lines Fitting Curves Fitting as a Probabilistic Inference Problem Acknowledgements:
Indexing local features and instance recognition May 16 th, 2017
 Indexing local features and instance recognition May 16 th, 2017 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 16 th, 2017 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Object Recognition and Augmented Reality
 11/02/17 Object Recognition and Augmented Reality Dali, Swans Reflecting Elephants Computational Photography Derek Hoiem, University of Illinois Last class: Image Stitching 1. Detect keypoints 2. Match
11/02/17 Object Recognition and Augmented Reality Dali, Swans Reflecting Elephants Computational Photography Derek Hoiem, University of Illinois Last class: Image Stitching 1. Detect keypoints 2. Match
A Systems View of Large- Scale 3D Reconstruction
 Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Indexing local features and instance recognition May 14 th, 2015
 Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
CS 664 Image Matching and Robust Fitting. Daniel Huttenlocher
 CS 664 Image Matching and Robust Fitting Daniel Huttenlocher Matching and Fitting Recognition and matching are closely related to fitting problems Parametric fitting can serve as more restricted domain
CS 664 Image Matching and Robust Fitting Daniel Huttenlocher Matching and Fitting Recognition and matching are closely related to fitting problems Parametric fitting can serve as more restricted domain
CS 4495 Computer Vision Classification 3: Bag of Words. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Classification 3: Bag of Words Aaron Bobick School of Interactive Computing Administrivia PS 6 is out. Due Tues Nov 25th, 11:55pm. One more assignment after that Mea culpa This
CS 4495 Computer Vision Classification 3: Bag of Words Aaron Bobick School of Interactive Computing Administrivia PS 6 is out. Due Tues Nov 25th, 11:55pm. One more assignment after that Mea culpa This
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Large Scale Image Retrieval
 Large Scale Image Retrieval Ondřej Chum and Jiří Matas Center for Machine Perception Czech Technical University in Prague Features Affine invariant features Efficient descriptors Corresponding regions
Large Scale Image Retrieval Ondřej Chum and Jiří Matas Center for Machine Perception Czech Technical University in Prague Features Affine invariant features Efficient descriptors Corresponding regions
DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS INTRODUCTION
 DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS Yun-Ting Su James Bethel Geomatics Engineering School of Civil Engineering Purdue University 550 Stadium Mall Drive, West Lafayette,
DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS Yun-Ting Su James Bethel Geomatics Engineering School of Civil Engineering Purdue University 550 Stadium Mall Drive, West Lafayette,
human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC
 COS 429: COMPUTER VISON Segmentation human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC Reading: Chapters 14, 15 Some of the slides are credited to:
COS 429: COMPUTER VISON Segmentation human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC Reading: Chapters 14, 15 Some of the slides are credited to:
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
INFO0948 Fitting and Shape Matching
 INFO0948 Fitting and Shape Matching Renaud Detry University of Liège, Belgium Updated March 31, 2015 1 / 33 These slides are based on the following book: D. Forsyth and J. Ponce. Computer vision: a modern
INFO0948 Fitting and Shape Matching Renaud Detry University of Liège, Belgium Updated March 31, 2015 1 / 33 These slides are based on the following book: D. Forsyth and J. Ponce. Computer vision: a modern
Photo by Carl Warner
 Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Large scale object/scene recognition
 Large scale object/scene recognition Image dataset: > 1 million images query Image search system ranked image list Each image described by approximately 2000 descriptors 2 10 9 descriptors to index! Database
Large scale object/scene recognition Image dataset: > 1 million images query Image search system ranked image list Each image described by approximately 2000 descriptors 2 10 9 descriptors to index! Database
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Large Scale 3D Reconstruction by Structure from Motion
 Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
OBJECT detection in general has many applications
 1 Implementing Rectangle Detection using Windowed Hough Transform Akhil Singh, Music Engineering, University of Miami Abstract This paper implements Jung and Schramm s method to use Hough Transform for
1 Implementing Rectangle Detection using Windowed Hough Transform Akhil Singh, Music Engineering, University of Miami Abstract This paper implements Jung and Schramm s method to use Hough Transform for
Model Fitting. Introduction to Computer Vision CSE 152 Lecture 11
 Model Fitting CSE 152 Lecture 11 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 10: Grouping and Model Fitting What to do with edges? Segment linked edge chains into curve features (e.g.,
Model Fitting CSE 152 Lecture 11 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 10: Grouping and Model Fitting What to do with edges? Segment linked edge chains into curve features (e.g.,
Bag of Words Models. CS4670 / 5670: Computer Vision Noah Snavely. Bag-of-words models 11/26/2013
 CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
Feature-based methods for image matching
 Feature-based methods for image matching Bag of Visual Words approach Feature descriptors SIFT descriptor SURF descriptor Geometric consistency check Vocabulary tree Digital Image Processing: Bernd Girod,
Feature-based methods for image matching Bag of Visual Words approach Feature descriptors SIFT descriptor SURF descriptor Geometric consistency check Vocabulary tree Digital Image Processing: Bernd Girod,
CPSC 425: Computer Vision
 1 / 45 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 45 Menu March 3, 2016 Topics: Hough
1 / 45 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 45 Menu March 3, 2016 Topics: Hough
Recognizing object instances
 Recognizing object instances UT-Austin Instance recognition Motivation visual search Visual words quantization, index, bags of words Spatial verification affine; RANSAC, Hough Other text retrieval tools
Recognizing object instances UT-Austin Instance recognition Motivation visual search Visual words quantization, index, bags of words Spatial verification affine; RANSAC, Hough Other text retrieval tools
Mobile Robots Summery. Autonomous Mobile Robots
 Mobile Robots Summery Roland Siegwart Mike Bosse, Marco Hutter, Martin Rufli, Davide Scaramuzza, (Margarita Chli, Paul Furgale) Mobile Robots Summery 1 Introduction probabilistic map-based localization
Mobile Robots Summery Roland Siegwart Mike Bosse, Marco Hutter, Martin Rufli, Davide Scaramuzza, (Margarita Chli, Paul Furgale) Mobile Robots Summery 1 Introduction probabilistic map-based localization
Fitting. Lecture 8. Cristian Sminchisescu. Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce
 Fitting Lecture 8 Cristian Sminchisescu Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce Fitting We want to associate a model with observed features [Fig from Marszalek & Schmid,
Fitting Lecture 8 Cristian Sminchisescu Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce Fitting We want to associate a model with observed features [Fig from Marszalek & Schmid,
Observations. Basic iteration Line estimated from 2 inliers
 Line estimated from 2 inliers 3 Observations We need (in this case!) a minimum of 2 points to determine a line Given such a line l, we can determine how well any other point y fits the line l For example:
Line estimated from 2 inliers 3 Observations We need (in this case!) a minimum of 2 points to determine a line Given such a line l, we can determine how well any other point y fits the line l For example:
By Suren Manvelyan,
 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
Automatic Image Alignment
 Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
HOUGH TRANSFORM CS 6350 C V
 HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
Maximally Stable Extremal Regions and Local Geometry for Visual Correspondences
 Maximally Stable Extremal Regions and Local Geometry for Visual Correspondences Michal Perďoch Supervisor: Jiří Matas Center for Machine Perception, Department of Cb Cybernetics Faculty of Electrical Engineering
Maximally Stable Extremal Regions and Local Geometry for Visual Correspondences Michal Perďoch Supervisor: Jiří Matas Center for Machine Perception, Department of Cb Cybernetics Faculty of Electrical Engineering
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Lecture 8: Fitting. Tuesday, Sept 25
 Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Large-scale visual recognition The bag-of-words representation
 Large-scale visual recognition The bag-of-words representation Florent Perronnin, XRCE Hervé Jégou, INRIA CVPR tutorial June 16, 2012 Outline Bag-of-words Large or small vocabularies? Extensions for instance-level
Large-scale visual recognition The bag-of-words representation Florent Perronnin, XRCE Hervé Jégou, INRIA CVPR tutorial June 16, 2012 Outline Bag-of-words Large or small vocabularies? Extensions for instance-level
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 7 Part-1 (Convolution Transform Speed-up and Hough Linear Transform) February 26, 2014 Sam Siewert Outline of Week 7 Basic Convolution Transform Speed-Up Concepts
Computer and Machine Vision Lecture Week 7 Part-1 (Convolution Transform Speed-up and Hough Linear Transform) February 26, 2014 Sam Siewert Outline of Week 7 Basic Convolution Transform Speed-Up Concepts
Fitting. Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local
 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on a line by looking only at each
Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on a line by looking only at each
Automatic Image Alignment
 Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM INTRODUCTION
 A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Lecture 9: Hough Transform and Thresholding base Segmentation
 #1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
#1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
Recognition. Topics that we will try to cover:
 Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) Object classification (we did this one already) Neural Networks Object class detection Hough-voting techniques
Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) Object classification (we did this one already) Neural Networks Object class detection Hough-voting techniques
Nonparametric estimation of multiple structures with outliers
 Nonparametric estimation of multiple structures with outliers Wei Zhang and Jana Kosecka George Mason University, 44 University Dr. Fairfax, VA 223 USA Abstract. Common problem encountered in the analysis
Nonparametric estimation of multiple structures with outliers Wei Zhang and Jana Kosecka George Mason University, 44 University Dr. Fairfax, VA 223 USA Abstract. Common problem encountered in the analysis
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Davide Scaramuzza. University of Zurich
 Davide Scaramuzza University of Zurich Robotics and Perception Group http://rpg.ifi.uzh.ch/ Scaramuzza, D., Fraundorfer, F., Visual Odometry: Part I - The First 30 Years and Fundamentals, IEEE Robotics
Davide Scaramuzza University of Zurich Robotics and Perception Group http://rpg.ifi.uzh.ch/ Scaramuzza, D., Fraundorfer, F., Visual Odometry: Part I - The First 30 Years and Fundamentals, IEEE Robotics
ECG782: Multidimensional Digital Signal Processing
 ECG782: Multidimensional Digital Signal Processing Object Recognition http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Knowledge Representation Statistical Pattern Recognition Neural Networks Boosting
ECG782: Multidimensional Digital Signal Processing Object Recognition http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Knowledge Representation Statistical Pattern Recognition Neural Networks Boosting
CS 231A Computer Vision (Winter 2018) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
Fitting (LMedS, RANSAC)
") Fitting (LMedS, RANSAC) Thursday, 23/03/2017 Antonis Argyros e-mail: argyros@csd.uoc.gr LMedS and RANSAC What if we have very many outliers? 2 1 Least Median of Squares ri : Residuals Least Squares n 2
Fitting (LMedS, RANSAC) Thursday, 23/03/2017 Antonis Argyros e-mail: argyros@csd.uoc.gr LMedS and RANSAC What if we have very many outliers? 2 1 Least Median of Squares ri : Residuals Least Squares n 2
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
HOUGH TRANSFORM. Plan for today. Introduction to HT. An image with linear structures. INF 4300 Digital Image Analysis
 INF 4300 Digital Image Analysis HOUGH TRANSFORM Fritz Albregtsen 14.09.2011 Plan for today This lecture goes more in detail than G&W 10.2! Introduction to Hough transform Using gradient information to
INF 4300 Digital Image Analysis HOUGH TRANSFORM Fritz Albregtsen 14.09.2011 Plan for today This lecture goes more in detail than G&W 10.2! Introduction to Hough transform Using gradient information to
Fitting. Fitting. Slides S. Lazebnik Harris Corners Pkwy, Charlotte, NC
 Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
SYDE Winter 2011 Introduction to Pattern Recognition. Clustering
 SYDE 372 - Winter 2011 Introduction to Pattern Recognition Clustering Alexander Wong Department of Systems Design Engineering University of Waterloo Outline 1 2 3 4 5 All the approaches we have learned
SYDE 372 - Winter 2011 Introduction to Pattern Recognition Clustering Alexander Wong Department of Systems Design Engineering University of Waterloo Outline 1 2 3 4 5 All the approaches we have learned
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
RANSAC RANdom SAmple Consensus
 Talk Outline importance for computer vision principle line fitting epipolar geometry estimation RANSAC RANdom SAmple Consensus Tomáš Svoboda, svoboda@cmp.felk.cvut.cz courtesy of Ondřej Chum, Jiří Matas
Talk Outline importance for computer vision principle line fitting epipolar geometry estimation RANSAC RANdom SAmple Consensus Tomáš Svoboda, svoboda@cmp.felk.cvut.cz courtesy of Ondřej Chum, Jiří Matas
Fitting D.A. Forsyth, CS 543
 Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
VK Multimedia Information Systems
 VK Multimedia Information Systems Mathias Lux, mlux@itec.uni-klu.ac.at Dienstags, 16.oo Uhr This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Agenda Evaluations
VK Multimedia Information Systems Mathias Lux, mlux@itec.uni-klu.ac.at Dienstags, 16.oo Uhr This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Agenda Evaluations
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Video Google: A Text Retrieval Approach to Object Matching in Videos
 Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
A Summary of Projective Geometry
 A Summary of Projective Geometry Copyright 22 Acuity Technologies Inc. In the last years a unified approach to creating D models from multiple images has been developed by Beardsley[],Hartley[4,5,9],Torr[,6]
A Summary of Projective Geometry Copyright 22 Acuity Technologies Inc. In the last years a unified approach to creating D models from multiple images has been developed by Beardsley[],Hartley[4,5,9],Torr[,6]
Evaluation of GIST descriptors for web scale image search
 Evaluation of GIST descriptors for web scale image search Matthijs Douze Hervé Jégou, Harsimrat Sandhawalia, Laurent Amsaleg and Cordelia Schmid INRIA Grenoble, France July 9, 2009 Evaluation of GIST for
Evaluation of GIST descriptors for web scale image search Matthijs Douze Hervé Jégou, Harsimrat Sandhawalia, Laurent Amsaleg and Cordelia Schmid INRIA Grenoble, France July 9, 2009 Evaluation of GIST for
Nonparametric estimation of multiple structures with outliers
 Nonparametric estimation of multiple structures with outliers Wei Zhang and Jana Kosecka Department of Computer Science, George Mason University, 44 University Dr. Fairfax, VA 223 USA {wzhang2,kosecka}@cs.gmu.edu
Nonparametric estimation of multiple structures with outliers Wei Zhang and Jana Kosecka Department of Computer Science, George Mason University, 44 University Dr. Fairfax, VA 223 USA {wzhang2,kosecka}@cs.gmu.edu
IMAGE MATCHING - ALOK TALEKAR - SAIRAM SUNDARESAN 11/23/2010 1
 IMAGE MATCHING - ALOK TALEKAR - SAIRAM SUNDARESAN 11/23/2010 1 : Presentation structure : 1. Brief overview of talk 2. What does Object Recognition involve? 3. The Recognition Problem 4. Mathematical background:
IMAGE MATCHING - ALOK TALEKAR - SAIRAM SUNDARESAN 11/23/2010 1 : Presentation structure : 1. Brief overview of talk 2. What does Object Recognition involve? 3. The Recognition Problem 4. Mathematical background:
Compressed local descriptors for fast image and video search in large databases
 Compressed local descriptors for fast image and video search in large databases Matthijs Douze2 joint work with Hervé Jégou1, Cordelia Schmid2 and Patrick Pérez3 1: INRIA Rennes, TEXMEX team, France 2:
Compressed local descriptors for fast image and video search in large databases Matthijs Douze2 joint work with Hervé Jégou1, Cordelia Schmid2 and Patrick Pérez3 1: INRIA Rennes, TEXMEX team, France 2: