Deep Optical Flow Estimation Via Multi-Scale Correspondence Structure Learning
|
|
|
- Derrick Carroll
- 6 years ago
- Views:
Transcription
1 Deep Optical Flow Estimation Via Multi-Scale Correspondence Structure Learning Shanshan Zhao 1, Xi Li 1,2,, Omar El Farouk Bourahla 1 1 Zhejiang University, Hangzhou, China 2 Alibaba-Zhejiang University Joint Institute of Frontier Technologies, Hangzhou, China {zsszju,xilizju,obourahla}@zju.edu.cn Abstract As an important and challenging problem in computer vision, learning based optical flow estimation aims to discover the intrinsic correspondence structure between two adjacent video frames through statistical learning. Therefore, a key issue to solve in this area is how to effectively model the multi-scale correspondence structure properties in an adaptive end-to-end learning fashion. Motivated by this observation, we propose an end-to-end multi-scale correspondence structure learning (M- SCSL) approach for optical flow estimation. In principle, the proposed MSCSL approach is capable of effectively capturing the multi-scale interimage-correlation correspondence structures within a multi-level feature space from deep learning. Moreover, the proposed MSCSL approach builds a spatial Conv- neural network model to adaptively model the intrinsic dependency relationships among these multi-scale correspondence structures. Finally, the above procedures for correspondence structure learning and multi-scale dependency modeling are implemented in a unified end-toend deep learning framework. Experimental results on several benchmark datasets demonstrate the effectiveness of the proposed approach. 1 Introduction Optical flow estimation seeks for perceiving the motion information across consecutive video frames, and has a wide range of vision applications such as human action recognition and abnormal event detection. Despite the significant progress in the literature, optical flow estimation is still confronted with a number of difficulties in discriminative feature representation, correspondence structure modeling, computational flexibility, etc. In this paper, we focus on how to set up an effective learning pipeline that is capable of performing multiscale correspondence structure modeling with discriminative feature representation in a flexible end-to-end deep learning framework. Corresponding author Due to the effectiveness in statistical modeling, learning based approaches emerge as an effective tool of optical flow estimation [Dosovitskiy et al., 2015; Jason et al., 2016; Ahmadi and Patras, 2016; Zhu et al., 2017]. Usually, these approaches either just take image matching at a single scale into account, or take a divide-and-conquer strategy that copes with image matching at multiple scales layer by layer. Under the circumstances of complicated situations (e.g., large inter-image displacement or complex motion), they are often incapable of effectively capturing the interaction or dependency relationships among the multi-scale inter-image correspondence structures, which play an important role in robust optical flow estimation. Furthermore, their matching strategies are often carried out in the following two aspects. 1) Set a fixed range of correspondence at a single scale in the learning process [Dosovitskiy et al., 2015; Jason et al., 2016; Zhu et al., 2017]; and 2) update the matching range dynamically with a coarse-to-fine scheme [Ahmadi and Patras, 2016; Ranjan and Black, 2016]. In practice, since videos have timevarying dynamic properties, selecting an appropriate fixed range for matching is difficult for adapting to various complicated situations. Besides, the coarse-to-fine scheme may cause matching error propagations or accumulations from coarse scales to fine scales. Therefore, for the sake of robust optical flow estimation, correspondence structure modeling ought to be performed in an adaptive multi-scale collaborative way. Moreover, it is crucial to effectively capture the cross-scale dependency information while preserving spatial self-correlations for each individual scale in a totally datadriven fashion. Motivated by the above observations, we propose a novel unified end-to-end optical flow estimation approach called Multi-Scale Correspondence Structure Learning (MSC- SL) (as shown in Fig. 1), which jointly models the dependency of multi-scale correspondence structures by a Spatial Conv- neural network model based on multi-level deep learning features. To summarize, the contributions of this work are twofold: We propose a multi-scale correspondence structure learning approach, which captures the multi-scale interimage-correlation correspondence structures based on the multi-level deep learning features. As a result, the task of optical flow estimation is accomplished by jointly learning the inter-image correspondence structures 3490
2 at multiple scales within an end-to-end deep learning framework. Such a multi-scale correspondence structure learning approach is innovative in optical flow estimation to the best of our knowledge. We design a Spatial Conv- neural network model to model the cross-scale dependency relationships among the multi-scale correspondence structures while preserving spatial self-correlations for each individual scale in a totally data-driven manner. As a result, adaptive multiscale matching information fusion is enabled to make optical flow estimation adapt to various complicated situations, resulting in robust estimation results. 2 Our Approach 2.1 Problem Formulation Let {(X i, O i )} N i=1 be a set of N training samples, where X i = (X A i R H W 3, X B i R H W 3 ) and O i R H W 2 represent an RGB image pair and the corresponding optical flow respectively. In this paper, our objective is to learn a model f(x i ; θ) parameterized by θ to predict the dense motion of the first image X A i. For the sake of expression, we ignore the left subscript i in the remaining parts. In this paper, we focus on two factors, (1) computing the correlation maps between image representations at different scales and adaptively setting up the correspondence structure in a data-driven way, (2) encoding the correspondence maps into high-level feature representation for regressing the optical flow. 2.2 Multi-Scale Correspondence Structure Modelling Multi-Scale Image Representations. To represent the input image at multiple scales, we firstly employ convolution neural networks (CNNs) to extract the deep features at a single scale parameterized by θ 1 to represent the image I, as illustrated in Fig. 1: Y = f CNN1 (I; θ 1 ) (1) and then model the multi-level feature representations parameterized by {θ 2,l } with Y as the input, as depicted in Fig. 1: F l = f CNN2 (Y; θ 2,l, l = 1, 2,... ) (2) where F l represents the l-th level, and the size of F l+1 is larger than that of F l. From top to bottom (or coarse to fine), the feature representations at small scales 1 tend to learn the sematic components, which contribute to find the correspondence of semantic parts with large displacements; Furthermore, the large scale feature maps tend to learn the local representation, which can distinguish the patches with small displacements. In this paper, we use {F A,l } and {F B,l } to denote the multi-scale representations of X A and X B respectively. Correspondence Structure Modelling. Given an image pair (X A, X B ) from a video sequence, we firstly extract their 1 In this paper, the small scale means small size; the large scale means large size multi-level feature representations {F A,l } and {F B,l } using Eq. 1 and Eq. 2. In order to learn the correspondence structures between the image pair, we calculate the similarity between the corresponding feature representations instead. Firstly, we discuss the correlation computation proposed in [Dosovitskiy et al., 2015]: Corr(F A i,j,f B S(i,j;d) ) = k Concat{ k o x= k o y= k F A i+o x,j+o y, F B p+o x,q+o y, (p, q) [i d, i + d] [j d, j + d]} where F A i,j and FB i,j denote the feature vector at the (i, j)- th location of F A and F B respectively, and Concat{ } denotes concatenating the elements in the set { } to a vector, S(i, j; d) denotes the (2d + 1) (2d + 1) neighborhood of location (i, j). The meaning of Eq. 3 is that given a maximum displacement d, the correlations between the location (i, j) in F A and S(i, j; d) in F B can be obtained by computing the similarities between the square patch of size (2k + 1) (2k + 1) centered at location (i, j) in F A and square patches of the same size centered at all locations of S in F B. To model the correspondence between the (i, j)-th location in F A and its corresponding location (î, ĵ) in F B, we can (1) calculate Corr(F A i,j, FB S(i,j;d) ) in a small neighbourhood S of the (i, j)-th location in F B, or (2) calculate Corr(F A i,j, FB S(i,j;d) ) in a large enough neighbourhood S of the (i, j)-th location in F B, or even in the whole feature map F B. But the former can not guarantee the computation of similarity between the (i, j)-th location and the corresponding (î, ĵ)-th location, while the latter leads to low computational efficiency, because the complexity O(d 2 k 2 ) of Eq. 3 exhibits quadratic growth when the value of d increases. To address that problem, we adopt correlation computation at each scale of multi-scale feature representations {F A,l } and {F B,l }: M l i,j = Corr(F A,l i,j, FB,l S(i,j;d l ) ) (4) where the maximum displacement d l varies from bottom to top. In order to give the network more flexibility in how to deal with the correspondence maps, we add three convolutional layers to the outputs of the Correlation operation, which is the same as that proposed in [Dosovitskiy et al., 2015], to extract the high-level representations parameterized by {θ 3,l }, as described in Fig. 1: (3) Q l = f CNN3 (M l ; θ 3,l, l = 1, 2,... ) (5) 2.3 Correspondence Maps Encoding Using Spatial Conv- Cross-Scale Dependency Relationships Modelling. For the sake of combining the correlation representations {Q l } and preserving the spatial structure to estimate dense optical flow, we consider the representations as a feature map sequence, 3491
 3 Conv(1) 3 Conv(1) 3 Conv(1) 3 Q 1 Q 2 Q 3 Q 4 Concat 640 Intra Level Dependency Maps")
3 Image X B Multi-Scale Reprsentations Y B Siamese Network Y A Y A Pool(4)+Conv(2) Pool(2)+Conv(2) Conv (2) Conv (1) Pool(4)+Conv(2) Pool(2)+Conv(2) Conv (2) Conv (1) Correlation F B,1 F B,2 F B,3 F B,4 F A,1 F A,2 F A,3 F A,4 M 1 M 2 M 3 M 4 Correspondence Maps P 1 P 2 P 3 P 4 Conv(1) 3 Conv(1) 3 Conv(1) 3 Conv(1) 3 Q 1 Q 2 Q 3 Q 4 Concat 640 Intra Level Dependency Maps Prediction Image X A Copy Y A Flow Map Figure 1: The proposed CNN framework of Multi-Scale Correspondence Structure Learning (MSCSL). The n in Pool(n) and Conv(n) denotes the stride of corresponding operation, and 3 denotes three consecutive operations. The network consists of three parts: (1) Multi-Scale Correspondence Structure Modelling, this part uses a Siamese Network to extract robust multi-level deep features for the two images, and then constructs the correspondence structures between the feature maps at different scales, (2) Correspondence Maps Encoding, this part employs a Spatial Conv- presented in this work to encode the correspondence maps at different scales, (3) Prediction, we use the encoded feature representation to predict the optical flow map. and then apply Convolutional Gated-Recurrent-Unit Recurrent Networks(Conv-s) to model the cross-scale dependency relationships among the multi-scale correspondence structures. Conv-s have been used to model the temporal dependencies between frames of the video sequence [Ballas et al., 2015; Siam et al., 2016]. A key advantage of Conv- s is that they can not only model the dependencies a- mong a sequence, but also preserve the spatial location of each feature vector. One of significant differences between a Conv- and a traditional is that innerproduct operations are replaced by convolution operations. However, because of the employed scheme similar to coarse-to-fine, the size of the (t + 1)-th input in the sequence is larger than that of the t-th input. We cannot apply the s- tandard Conv- on our problem, so instead we propose a Spatial Conv- in which each layer s output is upsampled as the input of the next layer. For the input sequence {Q l }, the formulation of the Spatial Conv- is: Z l = σ(w z Q l + U z H l 1, ) (6) R l = σ(w r Q l + U r H l 1, ) (7) H l = tanh(w Q l + U (R l H l 1, )) (8) H l = (1 Z l ) H l 1, + Z l H l (9) H l, = W H l (10) where and denote a convolution operation and an element-wise multiplication respectively, and σ is an activation function, e.g., sigmoid., denotes the transposed convolution. The Spatial Conv- can model the transition from coarse to fine and recover the spatial topology, outputting intra-level dependency maps {H l }. Intra-Level Dependency Maps Combination. After getting the hidden outputs {H l }, we upsample them to the same size, written as P l : P l = f CNN4 (Q l ; θ 4 ) (11) where θ 4 := {W z, U z, W r, U r, W, U, W } are the parameters needed to be optimized. Furthermore, we concatenate the hidden outputs {P l } with the 2nd convolutional output Ỹ A of X A to get the final encoded feature representation for optical flow estimation, as depicted in Fig. 1: E = Concat{ỸA, P l, l = 1, 2,... } (12) where Concat represents the concatenation operation. Finally, the proposed framework learns a function parameterized by θ 5 to predict the optical flow: Ô = f CNN5 (E; θ 5 ) = f(x A, X B ; θ 1, θ 2,l, θ 3,l, θ 4, θ 5, l = 1, 2,... ) (13) 2.4 Unified End-to-End Optimization As the image representation, correspondence structure learning and correspondence maps encoding are highly related, we construct a unified end-to-end framework to optimize the 3492




 train test train test train test train test EpicFlow 2.40 4.12 3.70 6.")



 6.85 (5.28) 8.51 8.79 0.93 2.")
 5.68 (4.21) 7.49 5.89 6.90 0.81 2.51 0.")
 5.78 (4.15) 7.42 5.77 7.10 0.86 2.25 0.06 three parts jointly.")
.")


 = i,j (14) (O u i,j Ôu i,j )2 + (O v i,j Ôv i,j )2 (15) (X A i,j")


![, 2015]: H W X Bwarp i,j = X B m,nmax(0, 1 i + Ôu i,j m ) n m max(0, 1 j + Ôv](/docs-images/71/65798085/images/4-17.jpg "i,j n ) (17) Because the raw data X A and X B contain noise and illumination")

![regions, the assumption also suffers difficulties [Jason et al., 2016].](/docs-images/71/65798085/images/4-19.jpg "Therefore, applying Eq.")







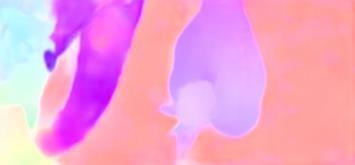
4 Table 1: Comparison of average endpoint errors (EPE) to the state-of-the-art. The times with right superscript indicate that the methods run on CPU, while the rest run on GPU. The numbers in parentheses are the results of the networks on dataset they were fine-tuned on. And the methods with +ft represent that the models were fine-tuned on MPI Sintel training dataset (two versions together) after trained on Flying Chairs training dataset. Methods Sintel clean Sintel final KITTI 2012 Middlebury Flying Chairs Time (sec) train test train test train test train test EpicFlow DeepFlow FlowFields EPPM DenseFlow LDOF FlowNetS FlowNetC SPyNet MSCSL/wosr MSCSL/wor MSCSL FlowNetS+ft (3.66) 6.97 (4.44) FlowNetC+ft (3.78) 6.85 (5.28) SPyNet+ft (3.17) 6.64 (4.32) MSCSL/wosr+ft (3.18) 5.68 (4.21) MSCSL/wor+ft (3.07) 5.79 (4.16) MSCSL+ft (3.07) 5.78 (4.15) three parts jointly. The loss function used in the optimization framework consists of two parts, namely, a supervised loss and an unsupervised loss (or reconstruction loss). The former is the endpoint error (EPE), which measures the Euclidean distance between the predicted flow Ô and the ground truth O, while the latter is based on the brightness constancy assumption, which measures the Euclidean distance between the first image X A and the warped second image X Bwarp. L(O, Ô; XA, X B ) = L s (O, Ô) + λl us(ô; XA, X B ) L s (O, Ô) = i,j L us (Ô; XA, X B ) = i,j (14) (O u i,j Ôu i,j )2 + (O v i,j Ôv i,j )2 (15) (X A i,j XBwarp i,j ) 2 (16) where Ôu and Ôv denote the displacement in horizontal and vertical respectively, and λ is the balance parameter. X Bwarp can be calculated via bilinear sampling according to Ô, as proposed in Spatial Transform Networks[Jaderberg et al., 2015]: H W X Bwarp i,j = X B m,nmax(0, 1 i + Ôu i,j m ) n m max(0, 1 j + Ôv i,j n ) (17) Because the raw data X A and X B contain noise and illumination changes and are less discriminative, in some cases the brightness constancy assumption is not satisfied; Furthermore, in highly saturated or very dark regions, the assumption also suffers difficulties [Jason et al., 2016]. Therefore, applying Eq. 16 on the raw data directly will make the network more difficult when training. To address that issue, we apply the brightness constancy assumption on the 2nd convolutional outputs ỸA and ỸB of X A and X B instead of X A and X B. The training and test stages are shown in Alg. 1. Images Ground Truth FlowNetC MSCSL/wosr MSCSL/wor MSCSL Figure 2: Examples of optical flow estimation using FlowNetC, M- SCSL/wosr, MSCSL/wor and MSCSL on the MPI Sintel dataset (Clean version). Note that our proposed methods perform well in both small displacement and large displacement. 3 Experiments 3.1 Datasets Flying Chairs [Dosovitskiy et al., 2015] is a synthetic dataset created by applying affine transformations to a real image dataset and a rendered set of 3D chair models. This dataset contains 22, 872 image pairs, and is split into 22, 232 training and 640 test pairs. MPI Sintel [Butler et al., 2012] is created from an animated movie and contains many large displacements and provides dense ground truth. It consists of two versions: the Final version and the Clean version. The former contains motion blurs and atmospheric effects, while the latter does not include these effects. There are 1, 041 training image pairs for each version. KITTI 2012 [Geiger et al., 2012] is created from real world scenes by using a camera and a 3D laser scanner. It consists of 194 training image pairs with sparse optical flow ground truth. Middlebury [Baker et al., 2011] is a very small dataset, containing only 8 image pairs for training. And the displacements are typically limited to 10 pixels. 3493
5 Table 2: Comparison of FlowNet, SPyNet and our proposed methods on MPI Sintel test datasets for different velocities (s ) and displacement (d ). Methods Sintel Final d 0 10 d d s 0 10 s s 40+ FlowNetS+ft FlowNetC+ft SPyNet+ft MSCSL/wosr+ft MSCSL/wor+ft MSCSL+ft Methods Sintel Clean d 0 10 d d s 0 10 s s 40+ FlowNetS+ft FlowNetC+ft SPyNet+ft MSCSL/wosr+ft MSCSL/wor+ft MSCSL+ft Implementation Details Network Architecture In this part, we introduce the network architecture briefly. We use 7 7 convolutional kernel for the first convolutional layer and 5 5 for the second and third convolutional layers. Then we use max-pooling and convolutional operations to obtain multi-scale representations, as illustrated in Fig. 1. The correlation layer is the same as that proposed in [Dosovitskiy et al., 2015], and the d l are set to 5, 5, 10, 10 from top to bottom (or from coarse to fine). And then we employ 3 3 kernel and 4 4 kernel for the other convolutional layers and deconvolutional layers respectively. Data Augmentation To avoid overfitting and improve the generalization of network, we employ the data augmentation strategy for the training by performing random online transformations, including scaling, rotation, translation, as well as additive Gaussian noise, contrast, multiplicative color changes to the RGB channels per image, gamma and additive brightness. Training Details We implement our architecture using Caffe [Jia et al., 2014] and use an NVIDIA TITAN X GPU to train the network. To verify our proposed framework, we conduct three comparison experiments, (1) MSCSL/wosr, this experiment does not contain both the proposed Spatial Conv- and reconstruction loss, and use the refinement network proposed in [Dosovitskiy et al., 2015] to predict dense optical flow, (2) M- SCSL/wor, this experiment employs the Spatial Conv-, which can be implemented by unfolding the recurrent model in the prototxt file, to encode the correspondence maps for dense optical flow estimation and demonstrates the effectiveness of the Spatial Conv- in comparison to MSCL/wosr, (3) MSCSL, this experiment contains all parts (Spatial Conv- and reconstruction loss) aforementioned. In the MSCSL/wosr and MSCSL/wor, we train the networks on Flying Chairs training dataset using Adam optimization with β 1 = 0.9 and β 2 = To tackle the gradients explosion, we adopt the same strategy as proposed in [Dosovitskiy et al., 2015]. Specifically, we firstly use a learning rate of 1e 6 for the first 10k iterations with a batch size of 8 pairs. After that, we increase the learning rate to 1e 4 for the following 300k iterations, and then divide it by 2 every 100k iterations. We terminate the training after 600k iterations (about 116 hours). In the MSCSL, we firstly train the MSCSL/wor for 500k iterations using the training strategy above. After that, we add the reconstruction loss with the balance parameter λ = And then we fine-tune the network for 100k iterations with a fixed learning of 1.25e 5. After training the three networks on Flying Chairs training dataset respectively, we fine-tune the networks on the MPI Sintel training dataset for tens of thousands of iterations with a fixed learning rate of 1e 6 until the networks converge. Specifically, we fine-tune the networks on the Clean version and Final version together with 1, 816 for training and 266 for validation. Since the KITTI 2012 dataset and Middlebury dataset are small and only contain sparse ground truth, we do not conduct fine-tuning on these two datasets. 3.3 Comparison to State-of-the-Art In this section, we compare our proposed methods to recent state-of-the-art approaches, including traditional methods, such as EpicFlow [Revaud et al., 2015], DeepFlow [Weinzaepfel et al., 2013], FlowFields [Bailer et al., 2015], EPP- M [Bao et al., 2014], LDOF [Brox and Malik, 2011], DenseFlow [Yang and Li, 2015], and deep learning based methods, such as FlowNetS [Dosovitskiy et al., 2015], FlowNetC [Dosovitskiy et al., 2015], SPyNet [Ranjan and Black, 2016]. Table 1 shows the performance comparison between our proposed methods and the state-of-the-art using average endpoint errors (EPE). We mainly focus on the deep learning based methods, so we only compare our proposed methods with the learning-based frameworks such as FlowNet and SpyNet. Flying Chairs. For all three comparison experiments, We train our networks on this dataset firstly, and employ MPI S- intel dataset to fine-tune them further. Table 1 shows that M- SCSL outperforms the other comparison experiments, MSC- SL/wosr and MSCSL/wor. Furthermore, our proposed methods achieve better performance comparable with the state-ofthe-art methods. After fine-tuning, in most cases most learning based methods suffer from performance decay, this is mostly because of the disparity between Flying Chairs and MPI Sintel dataset. Some visual estimation results on this dataset are shown in Fig. 3. MPI Sintel. After the training on Flying Chairs firstly, we fine-tune the trained models on this dataset. The models 3494



 and the trained deep model f(x A, X B ; θ) Output: The")






6 Algorithm 1: Deep Optical Flow Estimation Via MSCSL Input: A set of N training samples {((X A i, X B i ), O i)} N i=1 Output: The deep model parameterized by θ: f(x A, X B ; θ) /* The training stage */ 1 repeat /* For the K batches, do */ 2 for k = 1,..., K do /* Process the k-th training mini-batches B k */ 3 for n B k do /* Process the n-th image pair in B k */ 4 Extract the image representation Yn A and Yn B using Eq. 1; 5 Model the multi-scale feature representation {F A,l n } and {F B,l n } using Eq. 2; 6 Compute the correlation between feature representations {M l n} using Eq. 3 and Eq. 4; 7 Extract the high-level representations {Q l n} of {M l n} using Eq. 5; 8 Encode the correspondence representations {Q l n} to get {P l n} using Eq. 6; 9 Concatenate {P l n} with the 2nd convolutional outputs of X A n to obtain E n using Eq. 12; 10 Regress the optical flow estimation Ôn using Eq. 13; 11 Minimize the objective function Eq. 14; 12 end /* Update network parameters 13 Update parameters */ θ = {θ 1, θ 2,l, θ 3,l, θ 4, θ 5, l = 1, 2,... } using Adam; 14 end 15 iter iter until iter < max iter; 17 return; /* The test stage */ Input: Given an image pair (X A t, X B t ) and the trained deep model f(x A, X B ; θ) Output: The predicted optical flow Ôt = f(x A t, X B t ; θ 1, θ 2,l, θ 3,l, θ 4, θ 5, l = 1, 2,... ) 18 return; trained on Flying Chairs are evaluated on the training dataset. The results shown in Table 1 demonstrate MSCSL s and M- SCSL/sor s better ability to generalize than MSCSL/wosr s and other learning based approaches. To further verify our proposed methods, we compare our methods with FlowNetS, FlownetC and SPyNet on MPI Sintel test dataset for different velocities and distances from motion boundaries, as described in Table 2. As shown in Table 1 and Table 2, our proposed methods perform better than other deep learning based methods. However, in the regions with velocities larger than 40 pixels (smaller than 10 pixels), the proposed methods are less accurate than FlowNetC (SpyNet). Some visual results are shown in Fig. 2. KITTI 2012 and Middlebury. These two datasets are too s- mall, so we do not fine-tune the models on these datasets. We evaluate the trained models on KITTI 2010 training dataset, Images Ground Truth MSCSL/wosr MSCSL/wor MSCSL Figure 3: Examples of optical flow prediction on the Flying Chairs dataset. Comparison to MSCSL/wosr, the results of MSCSL/wor and MSCSL are more smooth and finer. KITTI 2012 test dataset and Middlebury training dataset respectively. Table 1 shows that our proposed methods outperform other deep learning based approaches remarkably on the KITTI 2012 dataset (including training set and test set). However, in most cases, on Middlebury training dataset, mainly containing small displacements, our proposed methods do not perform well, comparison to SPyNet. Analysis. The results of our framework are more smooth and fine-grained. Specifically, our framework is capable of capturing the motion information of fine-grained object parts, as well as preserving edge information. Meanwhile, our Spatial Conv- can suppress the noises in the results of model without it. All these insights can be observed in Fig. 3 and Fig. 2. However, our proposed frameworks are incapable of effectively capturing the correspondence structure and unstable in regions where the texture is uniform (e.g., on Middlebury dataset). Timings. In Table 1, we show the per-frame runtimes of different approaches. Traditional methods are often implemented on a single CPU, while deep learning based methods tend to run on GPU. Therefore, we only compare the runtimes with FlowNetS, FlowNetC and SPyNet. The results in Table 1 demonstrate that our proposed methods (run on NVIDIA TI- TAN X GPU) improve the accuracy with a comparable speed against the state-of-the-art. 4 Conclusion In this paper, we propose a novel end-to-end multi-scale correspondence structure learning based on deep learning for optical flow estimation. The proposed MSCSL learns the correspondence structure and models the multi-scale dependency in a unified end-to-end deep learning framework. Our model outperforms the state-of-the-art approaches based on deep learning by a considerable computing efficiency. The experimental results on several datasets demonstrate the effectiveness of our proposed framework. Acknowledgements This work was supported in part by the National Natural Science Foundation of China under Grant U and Grant , in part by the Alibaba-Zhejiang University Joint Institute of Frontier Technologies. 3495
7 References [Ahmadi and Patras, 2016] Aria Ahmadi and Ioannis Patras. Unsupervised convolutional neural networks for motion estimation. In Image Processing (ICIP), 2016 IEEE International Conference on, pages IEEE, [Bailer et al., 2015] Christian Bailer, Bertram Taetz, and Didier Stricker. Flow fields: Dense correspondence fields for highly accurate large displacement optical flow estimation. In Proceedings of the IEEE International Conference on Computer Vision, pages , [Baker et al., 2011] Simon Baker, Daniel Scharstein, JP Lewis, Stefan Roth, Michael J Black, and Richard Szeliski. A database and evaluation methodology for optical flow. International Journal of Computer Vision, 92(1):1 31, [Ballas et al., 2015] Nicolas Ballas, Li Yao, Chris Pal, and Aaron Courville. Delving deeper into convolutional networks for learning video representations. arxiv preprint arxiv: , [Bao et al., 2014] Linchao Bao, Qingxiong Yang, and Hailin Jin. Fast edge-preserving patchmatch for large displacement optical flow. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages , [Brox and Malik, 2011] Thomas Brox and Jitendra Malik. Large displacement optical flow: descriptor matching in variational motion estimation. IEEE transactions on pattern analysis and machine intelligence, 33(3): , [Butler et al., 2012] Daniel J Butler, Jonas Wulff, Garrett B Stanley, and Michael J Black. A naturalistic open source movie for optical flow evaluation. In European Conference on Computer Vision, pages Springer, [Dosovitskiy et al., 2015] Alexey Dosovitskiy, Philipp Fischery, Eddy Ilg, Caner Hazirbas, Vladimir Golkov, Patrick van der Smagt, Daniel Cremers, Thomas Brox, et al. Flownet: Learning optical flow with convolutional networks. In 2015 IEEE International Conference on Computer Vision (ICCV), pages IEEE, [Geiger et al., 2012] Andreas Geiger, Philip Lenz, and Raquel Urtasun. Are we ready for autonomous driving? the kitti vision benchmark suite. In Computer Vision and Pattern Recognition (CVPR), 2012 IEEE Conference on, pages IEEE, [Jaderberg et al., 2015] Max Jaderberg, Karen Simonyan, Andrew Zisserman, et al. Spatial transformer networks. In Advances in Neural Information Processing Systems, pages , [Jason et al., 2016] J Yu Jason, Adam W Harley, and Konstantinos G Derpanis. Back to basics: Unsupervised learning of optical flow via brightness constancy and motion smoothness. In Computer Vision ECCV 2016 Workshops, pages Springer, [Jia et al., 2014] Yangqing Jia, Evan Shelhamer, Jeff Donahue, Sergey Karayev, Jonathan Long, Ross Girshick, Sergio Guadarrama, and Trevor Darrell. Caffe: Convolutional architecture for fast feature embedding. In Proceedings of the 22nd ACM international conference on Multimedia, pages ACM, [Ranjan and Black, 2016] Anurag Ranjan and Michael J Black. Optical flow estimation using a spatial pyramid network. arxiv preprint arxiv: , [Revaud et al., 2015] Jerome Revaud, Philippe Weinzaepfel, Zaid Harchaoui, and Cordelia Schmid. Epicflow: Edgepreserving interpolation of correspondences for optical flow. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages , [Siam et al., 2016] Mennatullah Siam, Sepehr Valipour, Martin Jagersand, and Nilanjan Ray. Convolutional gated recurrent networks for video segmentation. arxiv preprint arxiv: , [Weinzaepfel et al., 2013] Philippe Weinzaepfel, Jerome Revaud, Zaid Harchaoui, and Cordelia Schmid. Deepflow: Large displacement optical flow with deep matching. In Proceedings of the IEEE International Conference on Computer Vision, pages , [Yang and Li, 2015] Jiaolong Yang and Hongdong Li. Dense, accurate optical flow estimation with piecewise parametric model. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages , [Zhu et al., 2017] Yi Zhu, Zhenzhong Lan, Shawn Newsam, and Alexander G Hauptmann. Guided optical flow learning. arxiv preprint arxiv: ,
MOTION ESTIMATION USING CONVOLUTIONAL NEURAL NETWORKS. Mustafa Ozan Tezcan
 MOTION ESTIMATION USING CONVOLUTIONAL NEURAL NETWORKS Mustafa Ozan Tezcan Boston University Department of Electrical and Computer Engineering 8 Saint Mary s Street Boston, MA 2215 www.bu.edu/ece Dec. 19,
MOTION ESTIMATION USING CONVOLUTIONAL NEURAL NETWORKS Mustafa Ozan Tezcan Boston University Department of Electrical and Computer Engineering 8 Saint Mary s Street Boston, MA 2215 www.bu.edu/ece Dec. 19,
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains
 Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
arxiv: v1 [cs.cv] 9 May 2018
![arxiv: v1 [cs.cv] 9 May 2018](/thumbs/89/97538145.jpg "arxiv: v1 [cs.cv] 9 May 2018") Layered Optical Flow Estimation Using a Deep Neural Network with a Soft Mask Xi Zhang, Di Ma, Xu Ouyang, Shanshan Jiang, Lin Gan, Gady Agam, Computer Science Department, Illinois Institute of Technology
Layered Optical Flow Estimation Using a Deep Neural Network with a Soft Mask Xi Zhang, Di Ma, Xu Ouyang, Shanshan Jiang, Lin Gan, Gady Agam, Computer Science Department, Illinois Institute of Technology
Supplementary Material for "FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks"
 Supplementary Material for "FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks" Architecture Datasets S short S long S fine FlowNetS FlowNetC Chairs 15.58 - - Chairs - 14.60 14.28 Things3D
Supplementary Material for "FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks" Architecture Datasets S short S long S fine FlowNetS FlowNetC Chairs 15.58 - - Chairs - 14.60 14.28 Things3D
DENSENET FOR DENSE FLOW. Yi Zhu and Shawn Newsam. University of California, Merced 5200 N Lake Rd, Merced, CA, US {yzhu25,
 ENSENET FOR ENSE FLOW Yi Zhu and Shawn Newsam University of California, Merced 5200 N Lake Rd, Merced, CA, US {yzhu25, snewsam}@ucmerced.edu ASTRACT Classical approaches for estimating optical flow have
ENSENET FOR ENSE FLOW Yi Zhu and Shawn Newsam University of California, Merced 5200 N Lake Rd, Merced, CA, US {yzhu25, snewsam}@ucmerced.edu ASTRACT Classical approaches for estimating optical flow have
arxiv: v1 [cs.cv] 7 May 2018
![arxiv: v1 [cs.cv] 7 May 2018](/thumbs/79/78829573.jpg "arxiv: v1 [cs.cv] 7 May 2018") LEARNING OPTICAL FLOW VIA DILATED NETWORKS AND OCCLUSION REASONING Yi Zhu and Shawn Newsam University of California, Merced 5200 N Lake Rd, Merced, CA, US {yzhu25, snewsam}@ucmerced.edu arxiv:1805.02733v1
LEARNING OPTICAL FLOW VIA DILATED NETWORKS AND OCCLUSION REASONING Yi Zhu and Shawn Newsam University of California, Merced 5200 N Lake Rd, Merced, CA, US {yzhu25, snewsam}@ucmerced.edu arxiv:1805.02733v1
Optical flow. Cordelia Schmid
 Optical flow Cordelia Schmid Motion field The motion field is the projection of the 3D scene motion into the image Optical flow Definition: optical flow is the apparent motion of brightness patterns in
Optical flow Cordelia Schmid Motion field The motion field is the projection of the 3D scene motion into the image Optical flow Definition: optical flow is the apparent motion of brightness patterns in
UnFlow: Unsupervised Learning of Optical Flow with a Bidirectional Census Loss
 UnFlow: Unsupervised Learning of Optical Flow with a Bidirectional Census Loss AAAI 2018, New Orleans, USA Simon Meister, Junhwa Hur, and Stefan Roth Department of Computer Science, TU Darmstadt 2 Deep
UnFlow: Unsupervised Learning of Optical Flow with a Bidirectional Census Loss AAAI 2018, New Orleans, USA Simon Meister, Junhwa Hur, and Stefan Roth Department of Computer Science, TU Darmstadt 2 Deep
Semi-Supervised Learning for Optical Flow with Generative Adversarial Networks
 Semi-Supervised Learning for Optical Flow with Generative Adversarial Networks Wei-Sheng Lai 1 Jia-Bin Huang 2 Ming-Hsuan Yang 1,3 1 University of California, Merced 2 Virginia Tech 3 Nvidia Research 1
Semi-Supervised Learning for Optical Flow with Generative Adversarial Networks Wei-Sheng Lai 1 Jia-Bin Huang 2 Ming-Hsuan Yang 1,3 1 University of California, Merced 2 Virginia Tech 3 Nvidia Research 1
arxiv: v1 [cs.cv] 22 Jan 2016
![arxiv: v1 [cs.cv] 22 Jan 2016](/thumbs/76/73216866.jpg "arxiv: v1 [cs.cv] 22 Jan 2016") UNSUPERVISED CONVOLUTIONAL NEURAL NETWORKS FOR MOTION ESTIMATION Aria Ahmadi, Ioannis Patras School of Electronic Engineering and Computer Science Queen Mary University of London Mile End road, E1 4NS,
UNSUPERVISED CONVOLUTIONAL NEURAL NETWORKS FOR MOTION ESTIMATION Aria Ahmadi, Ioannis Patras School of Electronic Engineering and Computer Science Queen Mary University of London Mile End road, E1 4NS,
Fast Guided Global Interpolation for Depth and. Yu Li, Dongbo Min, Minh N. Do, Jiangbo Lu
 Fast Guided Global Interpolation for Depth and Yu Li, Dongbo Min, Minh N. Do, Jiangbo Lu Introduction Depth upsampling and motion interpolation are often required to generate a dense, high-quality, and
Fast Guided Global Interpolation for Depth and Yu Li, Dongbo Min, Minh N. Do, Jiangbo Lu Introduction Depth upsampling and motion interpolation are often required to generate a dense, high-quality, and
arxiv: v2 [cs.cv] 4 Apr 2018
![arxiv: v2 [cs.cv] 4 Apr 2018](/thumbs/82/84891090.jpg "arxiv: v2 [cs.cv] 4 Apr 2018") Occlusion Aware Unsupervised Learning of Optical Flow Yang Wang 1 Yi Yang 1 Zhenheng Yang 2 Liang Zhao 1 Peng Wang 1 Wei Xu 1,3 1 Baidu Research 2 University of Southern California 3 National Engineering
Occlusion Aware Unsupervised Learning of Optical Flow Yang Wang 1 Yi Yang 1 Zhenheng Yang 2 Liang Zhao 1 Peng Wang 1 Wei Xu 1,3 1 Baidu Research 2 University of Southern California 3 National Engineering
Perceptual Loss for Convolutional Neural Network Based Optical Flow Estimation. Zong-qing LU, Xiang ZHU and Qing-min LIAO *
 2017 2nd International Conference on Software, Multimedia and Communication Engineering (SMCE 2017) ISBN: 978-1-60595-458-5 Perceptual Loss for Convolutional Neural Network Based Optical Flow Estimation
2017 2nd International Conference on Software, Multimedia and Communication Engineering (SMCE 2017) ISBN: 978-1-60595-458-5 Perceptual Loss for Convolutional Neural Network Based Optical Flow Estimation
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials)
") ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network
 Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
arxiv: v1 [cs.cv] 6 Dec 2016
![arxiv: v1 [cs.cv] 6 Dec 2016](/thumbs/73/69202460.jpg "arxiv: v1 [cs.cv] 6 Dec 2016") FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks Eddy Ilg, Nikolaus Mayer, Tonmoy Saikia, Margret Keuper, Alexey Dosovitskiy, Thomas Brox University of Freiburg, Germany arxiv:1612.01925v1
FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks Eddy Ilg, Nikolaus Mayer, Tonmoy Saikia, Margret Keuper, Alexey Dosovitskiy, Thomas Brox University of Freiburg, Germany arxiv:1612.01925v1
arxiv: v1 [cs.cv] 25 Feb 2019
![arxiv: v1 [cs.cv] 25 Feb 2019](/thumbs/94/120600417.jpg "arxiv: v1 [cs.cv] 25 Feb 2019") DD: Learning Optical with Unlabeled Data Distillation Pengpeng Liu, Irwin King, Michael R. Lyu, Jia Xu The Chinese University of Hong Kong, Shatin, N.T., Hong Kong Tencent AI Lab, Shenzhen, China {ppliu,
DD: Learning Optical with Unlabeled Data Distillation Pengpeng Liu, Irwin King, Michael R. Lyu, Jia Xu The Chinese University of Hong Kong, Shatin, N.T., Hong Kong Tencent AI Lab, Shenzhen, China {ppliu,
Convolutional Neural Network Layer Reordering for Acceleration
 R1-15 SASIMI 2016 Proceedings Convolutional Neural Network Layer Reordering for Acceleration Vijay Daultani Subhajit Chaudhury Kazuhisa Ishizaka System Platform Labs Value Co-creation Center System Platform
R1-15 SASIMI 2016 Proceedings Convolutional Neural Network Layer Reordering for Acceleration Vijay Daultani Subhajit Chaudhury Kazuhisa Ishizaka System Platform Labs Value Co-creation Center System Platform
FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks
 Net 2.0: Evolution of Optical Estimation with Deep Networks Eddy Ilg, Nikolaus Mayer, Tonmoy Saikia, Margret Keuper, Alexey Dosovitskiy, Thomas Brox University of Freiburg, Germany {ilg,mayern,saikiat,keuper,dosovits,brox}@cs.uni-freiburg.de
Net 2.0: Evolution of Optical Estimation with Deep Networks Eddy Ilg, Nikolaus Mayer, Tonmoy Saikia, Margret Keuper, Alexey Dosovitskiy, Thomas Brox University of Freiburg, Germany {ilg,mayern,saikiat,keuper,dosovits,brox}@cs.uni-freiburg.de
Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material
 Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material Ayush Tewari 1,2 Michael Zollhöfer 1,2,3 Pablo Garrido 1,2 Florian Bernard 1,2 Hyeongwoo
Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material Ayush Tewari 1,2 Michael Zollhöfer 1,2,3 Pablo Garrido 1,2 Florian Bernard 1,2 Hyeongwoo
A Deep Learning Approach to Vehicle Speed Estimation
 A Deep Learning Approach to Vehicle Speed Estimation Benjamin Penchas bpenchas@stanford.edu Tobin Bell tbell@stanford.edu Marco Monteiro marcorm@stanford.edu ABSTRACT Given car dashboard video footage,
A Deep Learning Approach to Vehicle Speed Estimation Benjamin Penchas bpenchas@stanford.edu Tobin Bell tbell@stanford.edu Marco Monteiro marcorm@stanford.edu ABSTRACT Given car dashboard video footage,
Optical flow. Cordelia Schmid
 Optical flow Cordelia Schmid Motion field The motion field is the projection of the 3D scene motion into the image Optical flow Definition: optical flow is the apparent motion of brightness patterns in
Optical flow Cordelia Schmid Motion field The motion field is the projection of the 3D scene motion into the image Optical flow Definition: optical flow is the apparent motion of brightness patterns in
Models Matter, So Does Training: An Empirical Study of CNNs for Optical Flow Estimation
 1 Models Matter, So Does Training: An Empirical Study of CNNs for Optical Flow Estimation Deqing Sun, Xiaodong Yang, Ming-Yu Liu, and Jan Kautz arxiv:1809.05571v1 [cs.cv] 14 Sep 2018 Abstract We investigate
1 Models Matter, So Does Training: An Empirical Study of CNNs for Optical Flow Estimation Deqing Sun, Xiaodong Yang, Ming-Yu Liu, and Jan Kautz arxiv:1809.05571v1 [cs.cv] 14 Sep 2018 Abstract We investigate
arxiv: v1 [cs.cv] 13 Apr 2018
![arxiv: v1 [cs.cv] 13 Apr 2018](/thumbs/91/106898522.jpg "arxiv: v1 [cs.cv] 13 Apr 2018") arxiv:1804.04785v1 [cs.cv] 13 Apr 2018 Deep Motion Boundary Detection Xiaoqing Yin 1,2, Xiyang Dai 3, Xinchao Wang 4, Maojun Zhang 2, Dacheng Tao 1, Larry Davis 3 1 University of Sydney, 2 National University
arxiv:1804.04785v1 [cs.cv] 13 Apr 2018 Deep Motion Boundary Detection Xiaoqing Yin 1,2, Xiyang Dai 3, Xinchao Wang 4, Maojun Zhang 2, Dacheng Tao 1, Larry Davis 3 1 University of Sydney, 2 National University
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Ryerson University CP8208. Soft Computing and Machine Intelligence. Naive Road-Detection using CNNS. Authors: Sarah Asiri - Domenic Curro
 Ryerson University CP8208 Soft Computing and Machine Intelligence Naive Road-Detection using CNNS Authors: Sarah Asiri - Domenic Curro April 24 2016 Contents 1 Abstract 2 2 Introduction 2 3 Motivation
Ryerson University CP8208 Soft Computing and Machine Intelligence Naive Road-Detection using CNNS Authors: Sarah Asiri - Domenic Curro April 24 2016 Contents 1 Abstract 2 2 Introduction 2 3 Motivation
Notes 9: Optical Flow
 Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015
 CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015 Etienne Gadeski, Hervé Le Borgne, and Adrian Popescu CEA, LIST, Laboratory of Vision and Content Engineering, France
CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015 Etienne Gadeski, Hervé Le Borgne, and Adrian Popescu CEA, LIST, Laboratory of Vision and Content Engineering, France
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
PWC-Net: CNNs for Optical Flow Using Pyramid, Warping, and Cost Volume
 : CNNs for Optical Flow Using Pyramid, Warping, and Cost Volume Deqing Sun, Xiaodong Yang, Ming-Yu Liu, and Jan Kautz NVIDIA Abstract We present a compact but effective CNN model for optical flow, called.
: CNNs for Optical Flow Using Pyramid, Warping, and Cost Volume Deqing Sun, Xiaodong Yang, Ming-Yu Liu, and Jan Kautz NVIDIA Abstract We present a compact but effective CNN model for optical flow, called.
Efficient Coarse-to-Fine PatchMatch for Large Displacement Optical Flow
 Efficient Coarse-to-Fine PatchMatch for Large Displacement Optical Flow Yinlin Hu 1 Rui Song 1,2 Yunsong Li 1, huyinlin@gmail.com rsong@xidian.edu.cn ysli@mail.xidian.edu.cn 1 Xidian University, China
Efficient Coarse-to-Fine PatchMatch for Large Displacement Optical Flow Yinlin Hu 1 Rui Song 1,2 Yunsong Li 1, huyinlin@gmail.com rsong@xidian.edu.cn ysli@mail.xidian.edu.cn 1 Xidian University, China
EVALUATION OF DEEP LEARNING BASED STEREO MATCHING METHODS: FROM GROUND TO AERIAL IMAGES
 EVALUATION OF DEEP LEARNING BASED STEREO MATCHING METHODS: FROM GROUND TO AERIAL IMAGES J. Liu 1, S. Ji 1,*, C. Zhang 1, Z. Qin 1 1 School of Remote Sensing and Information Engineering, Wuhan University,
EVALUATION OF DEEP LEARNING BASED STEREO MATCHING METHODS: FROM GROUND TO AERIAL IMAGES J. Liu 1, S. Ji 1,*, C. Zhang 1, Z. Qin 1 1 School of Remote Sensing and Information Engineering, Wuhan University,
Unsupervised Learning of Stereo Matching
 Unsupervised Learning of Stereo Matching Chao Zhou 1 Hong Zhang 1 Xiaoyong Shen 2 Jiaya Jia 1,2 1 The Chinese University of Hong Kong 2 Youtu Lab, Tencent {zhouc, zhangh}@cse.cuhk.edu.hk dylanshen@tencent.com
Unsupervised Learning of Stereo Matching Chao Zhou 1 Hong Zhang 1 Xiaoyong Shen 2 Jiaya Jia 1,2 1 The Chinese University of Hong Kong 2 Youtu Lab, Tencent {zhouc, zhangh}@cse.cuhk.edu.hk dylanshen@tencent.com
Real-time Hand Tracking under Occlusion from an Egocentric RGB-D Sensor Supplemental Document
 Real-time Hand Tracking under Occlusion from an Egocentric RGB-D Sensor Supplemental Document Franziska Mueller 1,2 Dushyant Mehta 1,2 Oleksandr Sotnychenko 1 Srinath Sridhar 1 Dan Casas 3 Christian Theobalt
Real-time Hand Tracking under Occlusion from an Egocentric RGB-D Sensor Supplemental Document Franziska Mueller 1,2 Dushyant Mehta 1,2 Oleksandr Sotnychenko 1 Srinath Sridhar 1 Dan Casas 3 Christian Theobalt
Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29,
 Variations on the Hermann grid: an extinction illusion. Perception, 29,") Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29, 1209-1217. CS 4495 Computer Vision A. Bobick Sparse to Dense Correspodence Building Rome in
Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29, 1209-1217. CS 4495 Computer Vision A. Bobick Sparse to Dense Correspodence Building Rome in
arxiv: v1 [cs.cv] 30 Nov 2017
![arxiv: v1 [cs.cv] 30 Nov 2017](/thumbs/75/71644976.jpg "arxiv: v1 [cs.cv] 30 Nov 2017") Super SloMo: High Quality Estimation of Multiple Intermediate Frames for Video Interpolation Huaizu Jiang 1 Deqing Sun 2 Varun Jampani 2 Ming-Hsuan Yang 3,2 Erik Learned-Miller 1 Jan Kautz 2 1 UMass Amherst
Super SloMo: High Quality Estimation of Multiple Intermediate Frames for Video Interpolation Huaizu Jiang 1 Deqing Sun 2 Varun Jampani 2 Ming-Hsuan Yang 3,2 Erik Learned-Miller 1 Jan Kautz 2 1 UMass Amherst
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Video Frame Interpolation Using Recurrent Convolutional Layers
 2018 IEEE Fourth International Conference on Multimedia Big Data (BigMM) Video Frame Interpolation Using Recurrent Convolutional Layers Zhifeng Zhang 1, Li Song 1,2, Rong Xie 2, Li Chen 1 1 Institute of
2018 IEEE Fourth International Conference on Multimedia Big Data (BigMM) Video Frame Interpolation Using Recurrent Convolutional Layers Zhifeng Zhang 1, Li Song 1,2, Rong Xie 2, Li Chen 1 1 Institute of
Structured Prediction using Convolutional Neural Networks
 Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
Convolutional Neural Network Implementation of Superresolution Video
 Convolutional Neural Network Implementation of Superresolution Video David Zeng Stanford University Stanford, CA dyzeng@stanford.edu Abstract This project implements Enhancing and Experiencing Spacetime
Convolutional Neural Network Implementation of Superresolution Video David Zeng Stanford University Stanford, CA dyzeng@stanford.edu Abstract This project implements Enhancing and Experiencing Spacetime
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs
 DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
Robust Local Optical Flow: Dense Motion Vector Field Interpolation
 Robust Local Optical Flow: Dense Motion Vector Field Interpolation Jonas Geistert geistert@nue.tu-berlin.de Tobias Senst senst@nue.tu-berlin.de Thomas Sikora sikora@nue.tu-berlin.de Abstract Optical flow
Robust Local Optical Flow: Dense Motion Vector Field Interpolation Jonas Geistert geistert@nue.tu-berlin.de Tobias Senst senst@nue.tu-berlin.de Thomas Sikora sikora@nue.tu-berlin.de Abstract Optical flow
ACCURATE estimation of optical flow is a useful but challenging. Pyramidal Gradient Matching for Optical Flow Estimation
 1 Pyramidal Gradient Matching for Optical Flow Estimation Yuanwei Li arxiv:1704.03217v1 [cs.cv] 11 Apr 2017 Abstract Initializing optical flow field by either sparse descriptor matching or dense patch
1 Pyramidal Gradient Matching for Optical Flow Estimation Yuanwei Li arxiv:1704.03217v1 [cs.cv] 11 Apr 2017 Abstract Initializing optical flow field by either sparse descriptor matching or dense patch
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
arxiv: v1 [cs.cv] 14 Dec 2016
![arxiv: v1 [cs.cv] 14 Dec 2016](/thumbs/88/115095109.jpg "arxiv: v1 [cs.cv] 14 Dec 2016") Detect, Replace, Refine: Deep Structured Prediction For Pixel Wise Labeling arxiv:1612.04770v1 [cs.cv] 14 Dec 2016 Spyros Gidaris University Paris-Est, LIGM Ecole des Ponts ParisTech spyros.gidaris@imagine.enpc.fr
Detect, Replace, Refine: Deep Structured Prediction For Pixel Wise Labeling arxiv:1612.04770v1 [cs.cv] 14 Dec 2016 Spyros Gidaris University Paris-Est, LIGM Ecole des Ponts ParisTech spyros.gidaris@imagine.enpc.fr
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK
 TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
Motion Estimation using Block Overlap Minimization
 Motion Estimation using Block Overlap Minimization Michael Santoro, Ghassan AlRegib, Yucel Altunbasak School of Electrical and Computer Engineering, Georgia Institute of Technology Atlanta, GA 30332 USA
Motion Estimation using Block Overlap Minimization Michael Santoro, Ghassan AlRegib, Yucel Altunbasak School of Electrical and Computer Engineering, Georgia Institute of Technology Atlanta, GA 30332 USA
Large-scale gesture recognition based on Multimodal data with C3D and TSN
 Large-scale gesture recognition based on Multimodal data with C3D and TSN July 6, 2017 1 Team details Team name ASU Team leader name Yunan Li Team leader address, phone number and email address: Xidian
Large-scale gesture recognition based on Multimodal data with C3D and TSN July 6, 2017 1 Team details Team name ASU Team leader name Yunan Li Team leader address, phone number and email address: Xidian
Two-Stream Convolutional Networks for Action Recognition in Videos
 Two-Stream Convolutional Networks for Action Recognition in Videos Karen Simonyan Andrew Zisserman Cemil Zalluhoğlu Introduction Aim Extend deep Convolution Networks to action recognition in video. Motivation
Two-Stream Convolutional Networks for Action Recognition in Videos Karen Simonyan Andrew Zisserman Cemil Zalluhoğlu Introduction Aim Extend deep Convolution Networks to action recognition in video. Motivation
Fully Convolutional Networks for Semantic Segmentation
 Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
arxiv: v1 [cs.cv] 29 Sep 2016
![arxiv: v1 [cs.cv] 29 Sep 2016](/thumbs/76/73787064.jpg "arxiv: v1 [cs.cv] 29 Sep 2016") arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
Spatio-Temporal Transformer Network for Video Restoration
 Spatio-Temporal Transformer Network for Video Restoration Tae Hyun Kim 1,2, Mehdi S. M. Sajjadi 1,3, Michael Hirsch 1,4, Bernhard Schölkopf 1 1 Max Planck Institute for Intelligent Systems, Tübingen, Germany
Spatio-Temporal Transformer Network for Video Restoration Tae Hyun Kim 1,2, Mehdi S. M. Sajjadi 1,3, Michael Hirsch 1,4, Bernhard Schölkopf 1 1 Max Planck Institute for Intelligent Systems, Tübingen, Germany
arxiv: v2 [cs.cv] 14 May 2018
![arxiv: v2 [cs.cv] 14 May 2018](/thumbs/79/79495201.jpg "arxiv: v2 [cs.cv] 14 May 2018") ContextVP: Fully Context-Aware Video Prediction Wonmin Byeon 1234, Qin Wang 1, Rupesh Kumar Srivastava 3, and Petros Koumoutsakos 1 arxiv:1710.08518v2 [cs.cv] 14 May 2018 Abstract Video prediction models
ContextVP: Fully Context-Aware Video Prediction Wonmin Byeon 1234, Qin Wang 1, Rupesh Kumar Srivastava 3, and Petros Koumoutsakos 1 arxiv:1710.08518v2 [cs.cv] 14 May 2018 Abstract Video prediction models
Deep learning for dense per-pixel prediction. Chunhua Shen The University of Adelaide, Australia
 Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deconvolutions in Convolutional Neural Networks
 Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Real-Time Simultaneous 3D Reconstruction and Optical Flow Estimation
 Real-Time Simultaneous 3D Reconstruction and Optical Flow Estimation Menandro Roxas Takeshi Oishi Institute of Industrial Science, The University of Tokyo roxas, oishi @cvl.iis.u-tokyo.ac.jp Abstract We
Real-Time Simultaneous 3D Reconstruction and Optical Flow Estimation Menandro Roxas Takeshi Oishi Institute of Industrial Science, The University of Tokyo roxas, oishi @cvl.iis.u-tokyo.ac.jp Abstract We
Part Localization by Exploiting Deep Convolutional Networks
 Part Localization by Exploiting Deep Convolutional Networks Marcel Simon, Erik Rodner, and Joachim Denzler Computer Vision Group, Friedrich Schiller University of Jena, Germany www.inf-cv.uni-jena.de Abstract.
Part Localization by Exploiting Deep Convolutional Networks Marcel Simon, Erik Rodner, and Joachim Denzler Computer Vision Group, Friedrich Schiller University of Jena, Germany www.inf-cv.uni-jena.de Abstract.
Novel Approach of Small and Large Displacement in Optical Flow for Object Detection
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735.Volume 11, Issue 4, Ver. II (Jul.-Aug.2016), PP 69-74 www.iosrjournals.org Novel Approach of Small
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735.Volume 11, Issue 4, Ver. II (Jul.-Aug.2016), PP 69-74 www.iosrjournals.org Novel Approach of Small
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Flow Estimation. Min Bai. February 8, University of Toronto. Min Bai (UofT) Flow Estimation February 8, / 47
 Flow Estimation February 8, / 47") Flow Estimation Min Bai University of Toronto February 8, 2016 Min Bai (UofT) Flow Estimation February 8, 2016 1 / 47 Outline Optical Flow - Continued Min Bai (UofT) Flow Estimation February 8, 2016 2
Flow Estimation Min Bai University of Toronto February 8, 2016 Min Bai (UofT) Flow Estimation February 8, 2016 1 / 47 Outline Optical Flow - Continued Min Bai (UofT) Flow Estimation February 8, 2016 2
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Motion and Optical Flow. Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi
 Motion and Optical Flow Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion and Optical Flow Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Ruch (Motion) Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska. Krzysztof Krawiec IDSS
 Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska. Krzysztof Krawiec IDSS") Ruch (Motion) Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska 1 Krzysztof Krawiec IDSS 2 The importance of visual motion Adds entirely new (temporal) dimension to visual
Ruch (Motion) Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska 1 Krzysztof Krawiec IDSS 2 The importance of visual motion Adds entirely new (temporal) dimension to visual
arxiv: v1 [cs.cv] 22 Feb 2017
![arxiv: v1 [cs.cv] 22 Feb 2017](/thumbs/75/72094284.jpg "arxiv: v1 [cs.cv] 22 Feb 2017") Synthesising Dynamic Textures using Convolutional Neural Networks arxiv:1702.07006v1 [cs.cv] 22 Feb 2017 Christina M. Funke, 1, 2, 3, Leon A. Gatys, 1, 2, 4, Alexander S. Ecker 1, 2, 5 1, 2, 3, 6 and Matthias
Synthesising Dynamic Textures using Convolutional Neural Networks arxiv:1702.07006v1 [cs.cv] 22 Feb 2017 Christina M. Funke, 1, 2, 3, Leon A. Gatys, 1, 2, 4, Alexander S. Ecker 1, 2, 5 1, 2, 3, 6 and Matthias
Supplemental Material for End-to-End Learning of Video Super-Resolution with Motion Compensation
 Supplemental Material for End-to-End Learning of Video Super-Resolution with Motion Compensation Osama Makansi, Eddy Ilg, and Thomas Brox Department of Computer Science, University of Freiburg 1 Computation
Supplemental Material for End-to-End Learning of Video Super-Resolution with Motion Compensation Osama Makansi, Eddy Ilg, and Thomas Brox Department of Computer Science, University of Freiburg 1 Computation
Combining Stereo Disparity and Optical Flow for Basic Scene Flow
 Combining Stereo Disparity and Optical Flow for Basic Scene Flow René Schuster, Christian Bailer, Oliver Wasenmüller, Didier Stricker DFKI German Research Center for Artificial Intelligence firstname.lastname@dfki.de
Combining Stereo Disparity and Optical Flow for Basic Scene Flow René Schuster, Christian Bailer, Oliver Wasenmüller, Didier Stricker DFKI German Research Center for Artificial Intelligence firstname.lastname@dfki.de
Recovering Realistic Texture in Image Super-resolution by Deep Spatial Feature Transform. Xintao Wang Ke Yu Chao Dong Chen Change Loy
 Recovering Realistic Texture in Image Super-resolution by Deep Spatial Feature Transform Xintao Wang Ke Yu Chao Dong Chen Change Loy Problem enlarge 4 times Low-resolution image High-resolution image Previous
Recovering Realistic Texture in Image Super-resolution by Deep Spatial Feature Transform Xintao Wang Ke Yu Chao Dong Chen Change Loy Problem enlarge 4 times Low-resolution image High-resolution image Previous
Deep Learning. Vladimir Golkov Technical University of Munich Computer Vision Group
 Deep Learning Vladimir Golkov Technical University of Munich Computer Vision Group 1D Input, 1D Output target input 2 2D Input, 1D Output: Data Distribution Complexity Imagine many dimensions (data occupies
Deep Learning Vladimir Golkov Technical University of Munich Computer Vision Group 1D Input, 1D Output target input 2 2D Input, 1D Output: Data Distribution Complexity Imagine many dimensions (data occupies
Filter Flow: Supplemental Material
 Filter Flow: Supplemental Material Steven M. Seitz University of Washington Simon Baker Microsoft Research We include larger images and a number of additional results obtained using Filter Flow [5]. 1
Filter Flow: Supplemental Material Steven M. Seitz University of Washington Simon Baker Microsoft Research We include larger images and a number of additional results obtained using Filter Flow [5]. 1
Comparison of stereo inspired optical flow estimation techniques
 Comparison of stereo inspired optical flow estimation techniques ABSTRACT The similarity of the correspondence problems in optical flow estimation and disparity estimation techniques enables methods to
Comparison of stereo inspired optical flow estimation techniques ABSTRACT The similarity of the correspondence problems in optical flow estimation and disparity estimation techniques enables methods to
Motion. 1 Introduction. 2 Optical Flow. Sohaib A Khan. 2.1 Brightness Constancy Equation
 Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
S2F: Slow-To-Fast Interpolator Flow
 S2F: Slow-To-Fast Interpolator Flow Yanchao Yang Stefano Soatto UCLA Vision Lab, University of California, Los Angeles, CA 90095 {yanchao.yang, soatto}@cs.ucla.edu Abstract We introduce a method to compute
S2F: Slow-To-Fast Interpolator Flow Yanchao Yang Stefano Soatto UCLA Vision Lab, University of California, Los Angeles, CA 90095 {yanchao.yang, soatto}@cs.ucla.edu Abstract We introduce a method to compute
arxiv: v1 [cs.cv] 20 Sep 2017
![arxiv: v1 [cs.cv] 20 Sep 2017](/thumbs/76/74170999.jpg "arxiv: v1 [cs.cv] 20 Sep 2017") SegFlow: Joint Learning for Video Object Segmentation and Optical Flow Jingchun Cheng 1,2 Yi-Hsuan Tsai 2 Shengjin Wang 1 Ming-Hsuan Yang 2 1 Tsinghua University 2 University of California, Merced 1 chengjingchun@gmail.com,
SegFlow: Joint Learning for Video Object Segmentation and Optical Flow Jingchun Cheng 1,2 Yi-Hsuan Tsai 2 Shengjin Wang 1 Ming-Hsuan Yang 2 1 Tsinghua University 2 University of California, Merced 1 chengjingchun@gmail.com,
Feature-Fused SSD: Fast Detection for Small Objects
 Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Exploiting Semantic Information and Deep Matching for Optical Flow
 Exploiting Semantic Information and Deep Matching for Optical Flow Min Bai, Wenjie Luo, Kaustav Kundu, Raquel Urtasun Department of Computer Science, University of Toronto {mbai, wenjie, kkundu, urtasun}@cs.toronto.edu
Exploiting Semantic Information and Deep Matching for Optical Flow Min Bai, Wenjie Luo, Kaustav Kundu, Raquel Urtasun Department of Computer Science, University of Toronto {mbai, wenjie, kkundu, urtasun}@cs.toronto.edu
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Using temporal seeding to constrain the disparity search range in stereo matching
 Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
arxiv: v1 [cs.cv] 16 Nov 2017
![arxiv: v1 [cs.cv] 16 Nov 2017](/thumbs/77/76133890.jpg "arxiv: v1 [cs.cv] 16 Nov 2017") Frame Interpolation with Multi-Scale Deep Loss Functions and Generative Adversarial Networks arxiv:1711.06045v1 [cs.cv] 16 Nov 2017 Joost van Amersfoort, Wenzhe Shi, Alejandro Acosta, Francisco Massa,
Frame Interpolation with Multi-Scale Deep Loss Functions and Generative Adversarial Networks arxiv:1711.06045v1 [cs.cv] 16 Nov 2017 Joost van Amersfoort, Wenzhe Shi, Alejandro Acosta, Francisco Massa,
arxiv: v2 [cs.cv] 28 Mar 2018
![arxiv: v2 [cs.cv] 28 Mar 2018](/thumbs/77/75965075.jpg "arxiv: v2 [cs.cv] 28 Mar 2018") Learning for Disparity Estimation through Feature Constancy Zhengfa Liang Yiliu Feng Yulan Guo Hengzhu Liu Wei Chen Linbo Qiao Li Zhou Jianfeng Zhang arxiv:1712.01039v2 [cs.cv] 28 Mar 2018 National University
Learning for Disparity Estimation through Feature Constancy Zhengfa Liang Yiliu Feng Yulan Guo Hengzhu Liu Wei Chen Linbo Qiao Li Zhou Jianfeng Zhang arxiv:1712.01039v2 [cs.cv] 28 Mar 2018 National University
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Deep Learning with Tensorflow AlexNet
 Machine Learning and Computer Vision Group Deep Learning with Tensorflow http://cvml.ist.ac.at/courses/dlwt_w17/ AlexNet Krizhevsky, Alex, Ilya Sutskever, and Geoffrey E. Hinton, "Imagenet classification
Machine Learning and Computer Vision Group Deep Learning with Tensorflow http://cvml.ist.ac.at/courses/dlwt_w17/ AlexNet Krizhevsky, Alex, Ilya Sutskever, and Geoffrey E. Hinton, "Imagenet classification
RSRN: Rich Side-output Residual Network for Medial Axis Detection
 RSRN: Rich Side-output Residual Network for Medial Axis Detection Chang Liu, Wei Ke, Jianbin Jiao, and Qixiang Ye University of Chinese Academy of Sciences, Beijing, China {liuchang615, kewei11}@mails.ucas.ac.cn,
RSRN: Rich Side-output Residual Network for Medial Axis Detection Chang Liu, Wei Ke, Jianbin Jiao, and Qixiang Ye University of Chinese Academy of Sciences, Beijing, China {liuchang615, kewei11}@mails.ucas.ac.cn,
Transfer Learning. Style Transfer in Deep Learning
 Transfer Learning & Style Transfer in Deep Learning 4-DEC-2016 Gal Barzilai, Ram Machlev Deep Learning Seminar School of Electrical Engineering Tel Aviv University Part 1: Transfer Learning in Deep Learning
Transfer Learning & Style Transfer in Deep Learning 4-DEC-2016 Gal Barzilai, Ram Machlev Deep Learning Seminar School of Electrical Engineering Tel Aviv University Part 1: Transfer Learning in Deep Learning
Learning visual odometry with a convolutional network
 Learning visual odometry with a convolutional network Kishore Konda 1, Roland Memisevic 2 1 Goethe University Frankfurt 2 University of Montreal konda.kishorereddy@gmail.com, roland.memisevic@gmail.com
Learning visual odometry with a convolutional network Kishore Konda 1, Roland Memisevic 2 1 Goethe University Frankfurt 2 University of Montreal konda.kishorereddy@gmail.com, roland.memisevic@gmail.com
CNN-based Patch Matching for Optical Flow with Thresholded Hinge Embedding Loss
 CNN-based Patch Matching for Optical Flow with Thresholded Hinge Embedding Loss Christian Bailer 1 Kiran Varanasi 1 Didier Stricker 1,2 Christian.Bailer@dfki.de Kiran.Varanasi@dfki.de Didier.Stricker@dfki.de
CNN-based Patch Matching for Optical Flow with Thresholded Hinge Embedding Loss Christian Bailer 1 Kiran Varanasi 1 Didier Stricker 1,2 Christian.Bailer@dfki.de Kiran.Varanasi@dfki.de Didier.Stricker@dfki.de
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
Supplementary Material: Unconstrained Salient Object Detection via Proposal Subset Optimization
 Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
Optical Flow-Based Motion Estimation. Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides.
 Optical Flow-Based Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Optical Flow-Based Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object