Collision detection. Piotr Fulma«ski. 19 pa¹dziernika Wydziaª Matematyki i Informatyki, Uniwersytet Šódzki, Polska
|
|
|
- Rachel Norton
- 6 years ago
- Views:
Transcription
1 Collision detection Piotr Fulma«ski Wydziaª Matematyki i Informatyki, Uniwersytet Šódzki, Polska 19 pa¹dziernika 2015
2 Table of contents
3 Collision in games Algorithms to detect collision in games depend on the type of shapes that can collide (e.g. rectangle to rectangle, rectangle to circle, circle to circle). Generally we have a simple generic shape known as a "hitbox" that covers somehow the entity so even though collision may not be pixel perfect, it will look good enough and be performant across multiple entities.

4 Collision in games Dierent hitbox: bounding sphere
")
5 Collision in games Dierent hitbox: axis aligned bounding boxes (AABB)
6 Collision in games Dierent hitbox: oriented bounding boxes (OBB)

7 Collision in games Dierent hitbox: capsule

8 Collision in games Dierent hitbox: convex polygon
9 Collision in games Dierent hitbox: concave polygon
10 Collision in games Dierent hitbox: concave polygon A simple polygon that is not convex is called concave or non-convex (sometimes also reentrant). It is always possible to partition a concave polygon into a set of convex polygons 1. 1 A polynomial-time algorithm for nding a decomposition into as few convex polygons is described in: Chazelle, Bernard; Dobkin, David P., Optimal convex decompositions, in Toussaint, G.T., Computational Geometry, Elsevier 1985, pp
11 Collision in games Dierent hitbox: concave polygon
12 Collision in games Multiple levels of collision It's also worth noting that it's not uncommon for games to have multiple levels of collision geometry per object. This way, a simple collision check (such as with spheres) can be performed rst to check whether there's any possibility whatsoever that two objects collided. If the simple collision check says there might be a collision, we can then perform calculations with more complex collision geometry.
13 Collision in games Sphere versus sphere intersection Two spheres intersect if the distance between their center points is less than the sum of their radii. However, computing a distance requires the use of a square root, so to avoid the square root, it is common instead to check the distance squared against the sum of the radii squared.
14 Collision in games Sphere versus sphere intersection The algorithm for this is only a couple of lines of code. It's also extremely ecient, which is what makes using spheres a very popular basic collision detection option. function SphereIntersection(BoundingSphere a, BoundingSphere b) // Construct a vector between centers, and get length squared Vector3 centervector = b. center - a. center // Recall that the length squared of v is the same as v dot v float distsquared = DotProduct(centerVector, centervector) // Is distsquared < sum of radii squared? if distsquared < ((a.radius+b.radius)*(a.radius+b.radius)) return true else return false end end
15 Collision in games AABB versus AABB intersection As with spheres, AABB intersection is not very expensive, even for 3D games.
16 Collision in games AABB versus AABB intersection In 2D case when checking for intersection between two AABBs, rather than trying to test the cases where the two AABBs do intersect, it's easier to test the four cases where two AABBs denitely cannot intersect.
17 Collision in games AABB versus AABB intersection function AABBIntersection(AABB2D a, AABB2D b) bool test = (a.max.x < b.min.x) (b.max.x < a.min.x) (a.max.y < b.min.y) (b.max.y < a.min.y) return!test end
18 Separating Axis Theorem (SAT) Introduction The Separating Axis Theorem, SAT for short, is a method to determine if two convex shapes are intersecting. The algorithm can also be used to nd the minimum penetration vector. SAT is a fast generic algorithm that can remove the need to have collision detection code for each shape type pair thereby reducing code and maintenance.
19 Separating Axis Theorem Only for convex SAT can only handle convex shapes, but this is not a problem because as we have see non-convex shapes can be represented by a combination of convex shapes (called a convex decomposition). We can then test each convex shape to determine collision for the whole shape.
20 Separating Axis Theorem (SAT) An idea of projection The concept that SAT uses is projection. Imagine that you have a light source whose rays are all parallel. If you shine that light at an object it will create a shadow on a surface. A shadow is a two dimensional projection of a three dimensional object. The projection of a two dimensional object is a one dimensional "shadow".
21 Separating Axis Theorem (SAT) Theorem Theorem (Separating Axis Theorem (SAT)) If two disjoint convex sets in n-dimensional Euclidean space sets are closed and at least one of them is compact, then there is a hyperplane in between them and even two parallel hyperplanes in between them separated by a gap. We can refolmulate this a little bit mathematical statement into more readable version Theorem (Separating Axis Theorem (SAT)) If two convex objects are not collide, there exists an axis for which the projection of the objects will not overlap.
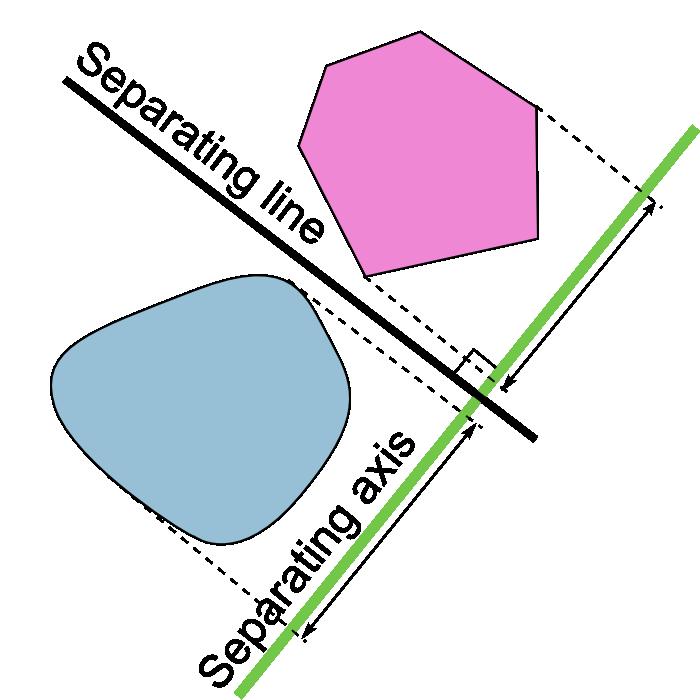
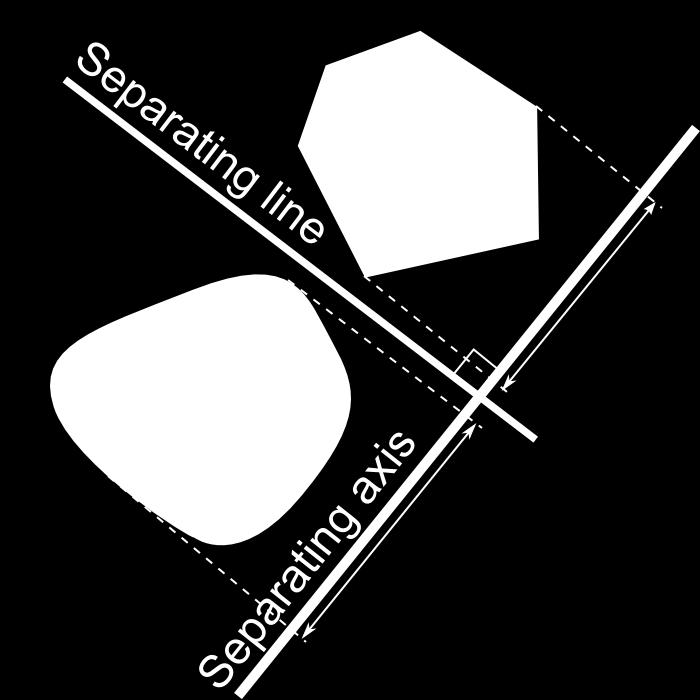
22 Separating Axis Theorem (SAT) Theorem

23 Separating Axis Theorem (SAT) Analogy for SAT Imagine taking a torch and shining it on the two shapes we are testing from dierent angles.

24 Separating Axis Theorem (SAT) Analogy for SAT If we work our way around the shapes and never nd a gap in the shadows then the objects must be touching. If we nd a gap, then they are clearly not touching.
25 Separating Axis Theorem (SAT) Obtaining the separating axes From a programming point of view it would be to intensive to check every possible angle. Luckily, due to the nature of the polygons, there is only a few key angles we need to check. The number of angles we need to check are the same as the number of sides of the polygons. This means that the maximum number of angles to check is the sum of the number of sides the two shapes we are testing have.
26 Separating Axis Theorem (SAT) Obtaining the separating axes From a programming point of view it would be to intensive to check every possible angle. Luckily, due to the nature of the polygons, there is only a few key angles we need to check. The number of angles we need to check are the same as the number of sides of the polygons. This means that the maximum number of angles to check is the sum of the number of sides the two shapes we are testing have.

27 Separating Axis Theorem (SAT) Obtaining the separating axes

28 Separating Axis Theorem (SAT) Obtaining the separating axes

29 Separating Axis Theorem (SAT) Obtaining the separating axes

30 Separating Axis Theorem (SAT) Obtaining the separating axes From the programmer point of view, the axes we must test are the normals of each shape's edges.
31 Separating Axis Theorem (SAT) Normals The normals of the edges can be easily obtained by ipping the coordinates and negating one.
32 Separating Axis Theorem (SAT) Determine that the shapes are not intersecting SAT may test many axes for overlap, however, the rst axis where the projections are not overlapping, the algorithm can immediately exit determining that the shapes are not intersecting. Because of this early exit, SAT is ideal for applications that have many objects but few collisions.
33 Separating Axis Theorem (SAT) Determine that the shapes are intersecting If, for all axes, the shape's projections overlap, then we can conclude that the shapes are intersecting. Note that to determine intersection, all axes must be tested for overlap.
34 Separating Axis Theorem (SAT) Determine that the shapes are intersecting
35 Separating Axis Theorem (SAT) Projecting a shape onto an axis When we know how to obtain the separating axes another question is how to project a shape onto an axis. Fortunately to project a polygon onto an axis is relatively simple. It is enought to loop over all the vertices performing the dot product with the axis and storing the minimum and maximum.

36 Separating Axis Theorem (SAT) Projecting a shape onto an axis
37 Separating Axis Theorem (SAT) Projecting a shape onto an axis As we have seen, SAT is a simple but repetitive method. Here we have one iteration of it, step by step: 1 Take one side from one of the polygons we are testing and nd the normal (perpendicular) vector from it. This will be the `axis'. 2 Loop through every point on the rst polygon and project it onto the axis. Keep track of the highest and lowest values found for this polygon. 3 Do the same for the second polygon. 4 Check the values you found and see if they overlap. If there is no gap, then polygons might be touching and we have to keep checking until we have gone through every side of both polygons. If we get through them all without nding a gap then they collide.
38 Separating Axis Theorem (SAT) Circle case Testing a circle against a polygon in SAT is a little bit strange but it can be done. The main thing to note is that a circle does not have any sides so there is no obvious axis that we can test against. Other words, there are innitely many axis we should take into account. There is one 'not so obvious' axis we do need to test however. This is the axis that runs from the centre of the circle to the closest vertex on the polygon.
 Circle")
39 Separating Axis Theorem (SAT) Circle case
40 Separating Axis Theorem (SAT) Circle case After that it is just a matter of going through the usual routine of looping through every axis on the other polygon and checking for overlaps. To project a circle onto the axis, we simply project the centre point of the circle and then add and subtract the radius.
41 Separating Axis Theorem (SAT) Finding the Minimum Translation Vector (MTV) In addition to returning true or false depending on whether the two shapes are intersecting SAT can return a Minimum Translation Vector (MTV). The MTV is the minimum magnitude vector used to push the shapes out of the collision. That axis which has the smallest overlap and that overlap is the MTV, the axis being the vector portion, and the overlap being the magnitude portion. To determine if the shapes are intersecting we must loop over all the axes from both shapes, so at the same time we can keep track of the minimum overlap and axis to be able to return a MTV when the shapes intersect.
42 Collision in games Bullet-through-paper problem To this point, we have covered instantaneous collision detection algorithms. This means the algorithm checks to see if the two objects collide on the current frame. Although this can work in many cases, there are some instances where it won't.
43 Collision in games Bullet-through-paper problem If a bullet is red at a piece of paper, it's unlikely there will be a precise frame where the bullet and the paper intersect with each other. That's because the bullet is travelling so fast and the paper is so thin. This problem is ttingly known as the bullet-through-paper problem.
44 Collision in games Swept sphere intersection In order to solve this problem, we can use either form of continuous collision detection (CCD) or simpler swept sphere intersection. In swept sphere intersection, there are two moving spheres. The inputs are the positions of both spheres during the last frame (t = 0) and the current frame (t = 1). Given these values, we can determine whether or not the two spheres collided at any point between the two frames. So unlike the instantaneous sphere-sphere intersection, it won't miss out on any intersections that occur between frames.
45 Collision in games Swept sphere intersection
46 Collision in games Swept sphere intersection We might notice that a swept sphere looks a lot like a capsule. That's because a swept sphere is a capsule. A swept sphere has a start point, end point, and a radius, which is exactly like a capsule. So the algorithm discussed for this case can also be used for "capsule versus capsule" intersection. Algorithm: use SAT, use dedicated algorithm like one described in: Sanjay Madhav, Game Programming Algorithms and Techniques, Addison-Wesley, 2014, pp
47 Collision performance Broad and narrow phase Although some of algorithms for collision detection are simple enough to calculate, it can be a waste of time to test every entity with every other entity. Usually games will split collision into two phases, broad and narrow. Broad Phase Broad phase should give us a list of entities that possibly could be colliding. This can be implemented with a spacial data structure that will give us a rough idea of where the entity exists and what exist around it. Some examples of spacial data structures are Quad Trees, R-Trees but we can also try to use less sophisticated but not less eective like spacial hashmap. Narrow Phase When you have a small list of entities to check you will want to use a narrow phase algorithm (like the ones listed above) to provide a certain answer as to whether there is a collision or not.

48 Hash table A hash table (hash map) is a data structure used to implement an associative array, a structure that can map keys to values. A hash table uses a hash function to compute an index into an array of buckets or slots, from which the desired value can be found. The idea of hashing is to distribute the entries (key/value pairs) across an array of buckets. Given a key, the algorithm computes an index that suggests where the entry can be found.
49 Spatial Hashing A spatial hash is a 2 or 3 dimensional extension of the hash table. Typically the keys to a hash table would be strings, but in a spatial hash we use 2 or 3 dimensional points as the keys. And here is where the twist comes in: for a normal hash table, a good hash function distributes keys as evenly as possible across the available buckets, in an eort to keep lookup time short. The result of this is that keys which are very close (lexicographically speaking) to each other, are likely to end up in distant buckets. But in a spatial hash we are dealing with locations in space, and locality is very important to us (especially for collision detection), so our hash function will not change the distribution of the inputs.
50 Spatial Hashing There are a few problems with inserting objects other than simple points into the spatial hash: the object may overlap several cells/buckets if it is near the edge of a bucket, an object may actually be larger than a single bucket. To solve this problem we add the object to all relevant buckets.
Collision detection. Piotr Fulma«ski. 1 grudnia
 Collision detection Piotr Fulma«ski piotr@fulmanski.pl 1 grudnia 2016 Table of contents Collision in games Algorithms to detect collision in games depend on the type of shapes that can collide (e.g. rectangle
Collision detection Piotr Fulma«ski piotr@fulmanski.pl 1 grudnia 2016 Table of contents Collision in games Algorithms to detect collision in games depend on the type of shapes that can collide (e.g. rectangle
Using Bounding Volume Hierarchies Efficient Collision Detection for Several Hundreds of Objects
 Part 7: Collision Detection Virtuelle Realität Wintersemester 2007/08 Prof. Bernhard Jung Overview Bounding Volumes Separating Axis Theorem Using Bounding Volume Hierarchies Efficient Collision Detection
Part 7: Collision Detection Virtuelle Realität Wintersemester 2007/08 Prof. Bernhard Jung Overview Bounding Volumes Separating Axis Theorem Using Bounding Volume Hierarchies Efficient Collision Detection
Lesson 05. Mid Phase. Collision Detection
 Lesson 05 Mid Phase Collision Detection Lecture 05 Outline Problem definition and motivations Generic Bounding Volume Hierarchy (BVH) BVH construction, fitting, overlapping Metrics and Tandem traversal
Lesson 05 Mid Phase Collision Detection Lecture 05 Outline Problem definition and motivations Generic Bounding Volume Hierarchy (BVH) BVH construction, fitting, overlapping Metrics and Tandem traversal
Physics Tutorial 4: Collision Detection
 Physics Tutorial 4: Collision Detection Summary Collision detection is explicitly introduced, and explored in the context of physics simulation. We discuss the two-tiered approach which is typically taken
Physics Tutorial 4: Collision Detection Summary Collision detection is explicitly introduced, and explored in the context of physics simulation. We discuss the two-tiered approach which is typically taken
Geometric Computations for Simulation
 1 Geometric Computations for Simulation David E. Johnson I. INTRODUCTION A static virtual world would be boring and unlikely to draw in a user enough to create a sense of immersion. Simulation allows things
1 Geometric Computations for Simulation David E. Johnson I. INTRODUCTION A static virtual world would be boring and unlikely to draw in a user enough to create a sense of immersion. Simulation allows things
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
Math for Gameplay / AI. John O Brien Senior Gameplay Programmer Insomniac Games, Inc
 Math for Gameplay / AI John O Brien Senior Gameplay Programmer Insomniac Games, Inc jobrien@insomniacgames.com jobrien@nc.rr.com Overview Basic Object Intersection Tests Real gameplay example(s) AI-specific
Math for Gameplay / AI John O Brien Senior Gameplay Programmer Insomniac Games, Inc jobrien@insomniacgames.com jobrien@nc.rr.com Overview Basic Object Intersection Tests Real gameplay example(s) AI-specific
Rigid Body Simulation. Jeremy Ulrich Advised by David Mount Fall 2013
 Rigid Body Simulation Jeremy Ulrich Advised by David Mount Fall 2013 Overview The project presented here is a real-time 3D rigid body physics engine, and is the result of an Independent Study on collision
Rigid Body Simulation Jeremy Ulrich Advised by David Mount Fall 2013 Overview The project presented here is a real-time 3D rigid body physics engine, and is the result of an Independent Study on collision
Simulation (last lecture and this one)
") Simulation (last lecture and this one) How used in games? Dynamics Collisions simple ------------------------------- Collisions harder detection bounding boxes response Controllers Mocap + simulation User
Simulation (last lecture and this one) How used in games? Dynamics Collisions simple ------------------------------- Collisions harder detection bounding boxes response Controllers Mocap + simulation User
Collisions/Reflection
 Collisions/Reflection General Collisions The calculating whether or not two 2D objects collide is equivalent to calculating if the two shapes share a common area (intersect). For general polygons this
Collisions/Reflection General Collisions The calculating whether or not two 2D objects collide is equivalent to calculating if the two shapes share a common area (intersect). For general polygons this
CPSC / Sonny Chan - University of Calgary. Collision Detection II
 CPSC 599.86 / 601.86 Sonny Chan - University of Calgary Collision Detection II Outline Broad phase collision detection: - Problem definition and motivation - Bounding volume hierarchies - Spatial partitioning
CPSC 599.86 / 601.86 Sonny Chan - University of Calgary Collision Detection II Outline Broad phase collision detection: - Problem definition and motivation - Bounding volume hierarchies - Spatial partitioning
Collision Detection II. These slides are mainly from Ming Lin s course notes at UNC Chapel Hill
 Collision Detection II These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Some Possible Approaches Geometric methods Algebraic techniques Hierarchical
Collision Detection II These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Some Possible Approaches Geometric methods Algebraic techniques Hierarchical
This blog addresses the question: how do we determine the intersection of two circles in the Cartesian plane?
 Intersecting Circles This blog addresses the question: how do we determine the intersection of two circles in the Cartesian plane? This is a problem that a programmer might have to solve, for example,
Intersecting Circles This blog addresses the question: how do we determine the intersection of two circles in the Cartesian plane? This is a problem that a programmer might have to solve, for example,
Collision and Proximity Queries
 Collision and Proximity Queries Dinesh Manocha (based on slides from Ming Lin) COMP790-058 Fall 2013 Geometric Proximity Queries l Given two object, how would you check: If they intersect with each other
Collision and Proximity Queries Dinesh Manocha (based on slides from Ming Lin) COMP790-058 Fall 2013 Geometric Proximity Queries l Given two object, how would you check: If they intersect with each other
Lecture 13 Geometry and Computational Geometry
 Lecture 13 Geometry and Computational Geometry Euiseong Seo (euiseong@skku.edu) 1 Geometry a Branch of mathematics concerned with questions of shape, size, relative position of figures, and the properties
Lecture 13 Geometry and Computational Geometry Euiseong Seo (euiseong@skku.edu) 1 Geometry a Branch of mathematics concerned with questions of shape, size, relative position of figures, and the properties
Collision Detection. These slides are mainly from Ming Lin s course notes at UNC Chapel Hill
 Collision Detection These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Computer Animation ILE5030 Computer Animation and Special Effects 2 Haptic
Collision Detection These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Computer Animation ILE5030 Computer Animation and Special Effects 2 Haptic
Glossary of dictionary terms in the AP geometry units
 Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
Spatial Data Structures
 CSCI 420 Computer Graphics Lecture 17 Spatial Data Structures Jernej Barbic University of Southern California Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees [Angel Ch. 8] 1 Ray Tracing Acceleration
CSCI 420 Computer Graphics Lecture 17 Spatial Data Structures Jernej Barbic University of Southern California Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees [Angel Ch. 8] 1 Ray Tracing Acceleration
Spatial Data Structures
 CSCI 480 Computer Graphics Lecture 7 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids BSP Trees [Ch. 0.] March 8, 0 Jernej Barbic University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s/
CSCI 480 Computer Graphics Lecture 7 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids BSP Trees [Ch. 0.] March 8, 0 Jernej Barbic University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s/
Collision Detection with Bounding Volume Hierarchies
 Simulation in Computer Graphics Collision Detection with Bounding Volume Hierarchies Matthias Teschner Computer Science Department University of Freiburg Outline introduction bounding volumes BV hierarchies
Simulation in Computer Graphics Collision Detection with Bounding Volume Hierarchies Matthias Teschner Computer Science Department University of Freiburg Outline introduction bounding volumes BV hierarchies
Collision Detection between Dynamic Rigid Objects and Static Displacement Mapped Surfaces in Computer Games
 between Dynamic Rigid Objects and Static Displacement Mapped Surfaces in Computer Games Author:, KTH Mentor: Joacim Jonsson, Avalanche Studios Supervisor: Prof. Christopher Peters, KTH 26 June, 2015 Overview
between Dynamic Rigid Objects and Static Displacement Mapped Surfaces in Computer Games Author:, KTH Mentor: Joacim Jonsson, Avalanche Studios Supervisor: Prof. Christopher Peters, KTH 26 June, 2015 Overview
Computer Graphics (CS 543) Lecture 13b Ray Tracing (Part 1) Prof Emmanuel Agu. Computer Science Dept. Worcester Polytechnic Institute (WPI)
 Lecture 13b Ray Tracing (Part 1) Prof Emmanuel Agu. Computer Science Dept. Worcester Polytechnic Institute (WPI)") Computer Graphics (CS 543) Lecture 13b Ray Tracing (Part 1) Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Raytracing Global illumination-based rendering method Simulates
Computer Graphics (CS 543) Lecture 13b Ray Tracing (Part 1) Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Raytracing Global illumination-based rendering method Simulates
Collision handling: detection and response
 Collision handling: detection and response Collision handling overview Detection Discrete collision detection Convex polygon intersection test General polygon intersection test Continuous collision detection
Collision handling: detection and response Collision handling overview Detection Discrete collision detection Convex polygon intersection test General polygon intersection test Continuous collision detection
Intersection of an Oriented Box and a Cone
 Intersection of an Oriented Box and a Cone David Eberly, Geometric Tools, Redmond WA 98052 https://www.geometrictools.com/ This work is licensed under the Creative Commons Attribution 4.0 International
Intersection of an Oriented Box and a Cone David Eberly, Geometric Tools, Redmond WA 98052 https://www.geometrictools.com/ This work is licensed under the Creative Commons Attribution 4.0 International
Tomas Akenine-Möller Department of Computer Engineering Chalmers University of Technology
 Tomas Akenine-Möller Department of Computer Engineering Chalmers University of Technology A tool needed for the graphics people all the time Very important components: Need to make them fast! Finding if
Tomas Akenine-Möller Department of Computer Engineering Chalmers University of Technology A tool needed for the graphics people all the time Very important components: Need to make them fast! Finding if
Computational Geometry
 Lecture 1: Introduction and convex hulls Geometry: points, lines,... Geometric objects Geometric relations Combinatorial complexity Computational geometry Plane (two-dimensional), R 2 Space (three-dimensional),
Lecture 1: Introduction and convex hulls Geometry: points, lines,... Geometric objects Geometric relations Combinatorial complexity Computational geometry Plane (two-dimensional), R 2 Space (three-dimensional),
Virtual Environments
 ELG 524 Virtual Environments Jean-Christian Delannoy viewing in 3D world coordinates / geometric modeling culling lighting virtualized reality collision detection collision response interactive forces
ELG 524 Virtual Environments Jean-Christian Delannoy viewing in 3D world coordinates / geometric modeling culling lighting virtualized reality collision detection collision response interactive forces
Lecture 25 of 41. Spatial Sorting: Binary Space Partitioning Quadtrees & Octrees
 Spatial Sorting: Binary Space Partitioning Quadtrees & Octrees William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Spatial Sorting: Binary Space Partitioning Quadtrees & Octrees William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Course Number: Course Title: Geometry
 Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
Basics of Computational Geometry
 Basics of Computational Geometry Nadeem Mohsin October 12, 2013 1 Contents This handout covers the basic concepts of computational geometry. Rather than exhaustively covering all the algorithms, it deals
Basics of Computational Geometry Nadeem Mohsin October 12, 2013 1 Contents This handout covers the basic concepts of computational geometry. Rather than exhaustively covering all the algorithms, it deals
Dynamic Collision Detection
 Distance Computation Between Non-Convex Polyhedra June 17, 2002 Applications Dynamic Collision Detection Applications Dynamic Collision Detection Evaluating Safety Tolerances Applications Dynamic Collision
Distance Computation Between Non-Convex Polyhedra June 17, 2002 Applications Dynamic Collision Detection Applications Dynamic Collision Detection Evaluating Safety Tolerances Applications Dynamic Collision
Geometry Definitions and Theorems. Chapter 9. Definitions and Important Terms & Facts
 Geometry Definitions and Theorems Chapter 9 Definitions and Important Terms & Facts A circle is the set of points in a plane at a given distance from a given point in that plane. The given point is the
Geometry Definitions and Theorems Chapter 9 Definitions and Important Terms & Facts A circle is the set of points in a plane at a given distance from a given point in that plane. The given point is the
Lecture 11: Ray tracing (cont.)
") Interactive Computer Graphics Ray tracing - Summary Lecture 11: Ray tracing (cont.) Graphics Lecture 10: Slide 1 Some slides adopted from H. Pfister, Harvard Graphics Lecture 10: Slide 2 Ray tracing -
Interactive Computer Graphics Ray tracing - Summary Lecture 11: Ray tracing (cont.) Graphics Lecture 10: Slide 1 Some slides adopted from H. Pfister, Harvard Graphics Lecture 10: Slide 2 Ray tracing -
Some Open Problems in Graph Theory and Computational Geometry
 Some Open Problems in Graph Theory and Computational Geometry David Eppstein Univ. of California, Irvine Dept. of Information and Computer Science ICS 269, January 25, 2002 Two Models of Algorithms Research
Some Open Problems in Graph Theory and Computational Geometry David Eppstein Univ. of California, Irvine Dept. of Information and Computer Science ICS 269, January 25, 2002 Two Models of Algorithms Research
Overview. Collision Detection. A Simple Collision Detection Algorithm. Collision Detection in a Dynamic Environment. Query Types.
 Overview Collision Detection Alan Liu aliu@usuhs.mil The Surgical Simulation Laboratory National Capital Area Medical Simulation Center Uniformed Services University http://simcen.usuhs.mil/miccai2003
Overview Collision Detection Alan Liu aliu@usuhs.mil The Surgical Simulation Laboratory National Capital Area Medical Simulation Center Uniformed Services University http://simcen.usuhs.mil/miccai2003
Curriki Geometry Glossary
 Curriki Geometry Glossary The following terms are used throughout the Curriki Geometry projects and represent the core vocabulary and concepts that students should know to meet Common Core State Standards.
Curriki Geometry Glossary The following terms are used throughout the Curriki Geometry projects and represent the core vocabulary and concepts that students should know to meet Common Core State Standards.
Geometry proxies (in 2D): a Convex Polygon
: a Convex Polygon") Geometry proxies (in 2D): a Convex Polygon Intersection of half-planes each delimited by a line Stored as: Test: a collection of (oriented) lines a point is inside iff it is in each half-plane A very good
Geometry proxies (in 2D): a Convex Polygon Intersection of half-planes each delimited by a line Stored as: Test: a collection of (oriented) lines a point is inside iff it is in each half-plane A very good
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
A Different Approach for Continuous Physics. Vincent ROBERT Physics Programmer at Ubisoft
 A Different Approach for Continuous Physics Vincent ROBERT vincent.robert@ubisoft.com Physics Programmer at Ubisoft A Different Approach for Continuous Physics Existing approaches Our method Limitations
A Different Approach for Continuous Physics Vincent ROBERT vincent.robert@ubisoft.com Physics Programmer at Ubisoft A Different Approach for Continuous Physics Existing approaches Our method Limitations
UNM - PNM STATEWIDE MATHEMATICS CONTEST XLI. February 7, 2009 Second Round Three Hours
 UNM - PNM STATEWIDE MATHEMATICS CONTEST XLI February 7, 009 Second Round Three Hours (1) An equilateral triangle is inscribed in a circle which is circumscribed by a square. This square is inscribed in
UNM - PNM STATEWIDE MATHEMATICS CONTEST XLI February 7, 009 Second Round Three Hours (1) An equilateral triangle is inscribed in a circle which is circumscribed by a square. This square is inscribed in
Interactive Math Glossary Terms and Definitions
 Terms and Definitions Absolute Value the magnitude of a number, or the distance from 0 on a real number line Addend any number or quantity being added addend + addend = sum Additive Property of Area the
Terms and Definitions Absolute Value the magnitude of a number, or the distance from 0 on a real number line Addend any number or quantity being added addend + addend = sum Additive Property of Area the
COMPUTER GRAPHICS - MIDTERM 1
 COMPUTER GRAPHICS - MIDTERM 1 Instructions: Answer 4 of the 5 questions below. The total points for each question is specied. Answer only one of the questions 3,4. Write your name and email below. 1 (1)
COMPUTER GRAPHICS - MIDTERM 1 Instructions: Answer 4 of the 5 questions below. The total points for each question is specied. Answer only one of the questions 3,4. Write your name and email below. 1 (1)
Ray Tracing Acceleration Data Structures
 Ray Tracing Acceleration Data Structures Sumair Ahmed October 29, 2009 Ray Tracing is very time-consuming because of the ray-object intersection calculations. With the brute force method, each ray has
Ray Tracing Acceleration Data Structures Sumair Ahmed October 29, 2009 Ray Tracing is very time-consuming because of the ray-object intersection calculations. With the brute force method, each ray has
Section 12.1 Translations and Rotations
 Section 12.1 Translations and Rotations Any rigid motion that preserves length or distance is an isometry. We look at two types of isometries in this section: translations and rotations. Translations A
Section 12.1 Translations and Rotations Any rigid motion that preserves length or distance is an isometry. We look at two types of isometries in this section: translations and rotations. Translations A
The radius for a regular polygon is the same as the radius of the circumscribed circle.
 Perimeter and Area The perimeter and area of geometric shapes are basic properties that we need to know. The more complex a shape is, the more complex the process can be in finding its perimeter and area.
Perimeter and Area The perimeter and area of geometric shapes are basic properties that we need to know. The more complex a shape is, the more complex the process can be in finding its perimeter and area.
Aston Hall s A-Z of mathematical terms
 Aston Hall s A-Z of mathematical terms The following guide is a glossary of mathematical terms, covering the concepts children are taught in FS2, KS1 and KS2. This may be useful to clear up any homework
Aston Hall s A-Z of mathematical terms The following guide is a glossary of mathematical terms, covering the concepts children are taught in FS2, KS1 and KS2. This may be useful to clear up any homework
It s hard to believe that it s already The last year moved at an incredible
 by Jeff Lander GRAPHIC CONTENT Crashing into the New Year It s hard to believe that it s already 1999. The last year moved at an incredible pace. It was a year with amazing advances in the visual quality
by Jeff Lander GRAPHIC CONTENT Crashing into the New Year It s hard to believe that it s already 1999. The last year moved at an incredible pace. It was a year with amazing advances in the visual quality
The Geometry of Carpentry and Joinery
 The Geometry of Carpentry and Joinery Pat Morin and Jason Morrison School of Computer Science, Carleton University, 115 Colonel By Drive Ottawa, Ontario, CANADA K1S 5B6 Abstract In this paper we propose
The Geometry of Carpentry and Joinery Pat Morin and Jason Morrison School of Computer Science, Carleton University, 115 Colonel By Drive Ottawa, Ontario, CANADA K1S 5B6 Abstract In this paper we propose
layers in a raster model
 layers in a raster model Layer 1 Layer 2 layers in an vector-based model (1) Layer 2 Layer 1 layers in an vector-based model (2) raster versus vector data model Raster model Vector model Simple data structure
layers in a raster model Layer 1 Layer 2 layers in an vector-based model (1) Layer 2 Layer 1 layers in an vector-based model (2) raster versus vector data model Raster model Vector model Simple data structure
Prime Time (Factors and Multiples)
") CONFIDENCE LEVEL: Prime Time Knowledge Map for 6 th Grade Math Prime Time (Factors and Multiples). A factor is a whole numbers that is multiplied by another whole number to get a product. (Ex: x 5 = ;
CONFIDENCE LEVEL: Prime Time Knowledge Map for 6 th Grade Math Prime Time (Factors and Multiples). A factor is a whole numbers that is multiplied by another whole number to get a product. (Ex: x 5 = ;
Ray-tracing Acceleration. Acceleration Data Structures for Ray Tracing. Shadows. Shadows & Light Sources. Antialiasing Supersampling.
 Ray-tracing Acceleration Acceleration Data Structures for Ray Tracing Thanks to Fredo Durand and Barb Cutler Soft shadows Antialiasing (getting rid of jaggies) Glossy reflection Motion blur Depth of field
Ray-tracing Acceleration Acceleration Data Structures for Ray Tracing Thanks to Fredo Durand and Barb Cutler Soft shadows Antialiasing (getting rid of jaggies) Glossy reflection Motion blur Depth of field
Continuous Collision Detection and Physics
 Continuous Collision Detection and Physics Erwin Coumans, Sony Computer Entertainment August 2005, Draft revision 5 0 Overview A novel approach to Angular and Linear Continuous Collision Detection is presented.
Continuous Collision Detection and Physics Erwin Coumans, Sony Computer Entertainment August 2005, Draft revision 5 0 Overview A novel approach to Angular and Linear Continuous Collision Detection is presented.
Accelerating Geometric Queries. Computer Graphics CMU /15-662, Fall 2016
 Accelerating Geometric Queries Computer Graphics CMU 15-462/15-662, Fall 2016 Geometric modeling and geometric queries p What point on the mesh is closest to p? What point on the mesh is closest to p?
Accelerating Geometric Queries Computer Graphics CMU 15-462/15-662, Fall 2016 Geometric modeling and geometric queries p What point on the mesh is closest to p? What point on the mesh is closest to p?
Spatial Data Structures and Speed-Up Techniques. Tomas Akenine-Möller Department of Computer Engineering Chalmers University of Technology
 Spatial Data Structures and Speed-Up Techniques Tomas Akenine-Möller Department of Computer Engineering Chalmers University of Technology Spatial data structures What is it? Data structure that organizes
Spatial Data Structures and Speed-Up Techniques Tomas Akenine-Möller Department of Computer Engineering Chalmers University of Technology Spatial data structures What is it? Data structure that organizes
Grade 9 Math Terminology
 Unit 1 Basic Skills Review BEDMAS a way of remembering order of operations: Brackets, Exponents, Division, Multiplication, Addition, Subtraction Collect like terms gather all like terms and simplify as
Unit 1 Basic Skills Review BEDMAS a way of remembering order of operations: Brackets, Exponents, Division, Multiplication, Addition, Subtraction Collect like terms gather all like terms and simplify as
Spatial Data Structures
 15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) April 1, 2003 [Angel 9.10] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) April 1, 2003 [Angel 9.10] Frank Pfenning Carnegie
CURVES OF CONSTANT WIDTH AND THEIR SHADOWS. Have you ever wondered why a manhole cover is in the shape of a circle? This
 CURVES OF CONSTANT WIDTH AND THEIR SHADOWS LUCIE PACIOTTI Abstract. In this paper we will investigate curves of constant width and the shadows that they cast. We will compute shadow functions for the circle,
CURVES OF CONSTANT WIDTH AND THEIR SHADOWS LUCIE PACIOTTI Abstract. In this paper we will investigate curves of constant width and the shadows that they cast. We will compute shadow functions for the circle,
We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance.
 Solid geometry We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance. First, note that everything we have proven for the
Solid geometry We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance. First, note that everything we have proven for the
Data Organization and Processing
 Data Organization and Processing Spatial Join (NDBI007) David Hoksza http://siret.ms.mff.cuni.cz/hoksza Outline Spatial join basics Relational join Spatial join Spatial join definition (1) Given two sets
Data Organization and Processing Spatial Join (NDBI007) David Hoksza http://siret.ms.mff.cuni.cz/hoksza Outline Spatial join basics Relational join Spatial join Spatial join definition (1) Given two sets
Topics. Ray Tracing II. Intersecting transformed objects. Transforming objects
 Topics Ray Tracing II CS 4620 Lecture 16 Transformations in ray tracing Transforming objects Transformation hierarchies Ray tracing acceleration structures Bounding volumes Bounding volume hierarchies
Topics Ray Tracing II CS 4620 Lecture 16 Transformations in ray tracing Transforming objects Transformation hierarchies Ray tracing acceleration structures Bounding volumes Bounding volume hierarchies
Developmental Math An Open Program Unit 7 Geometry First Edition
 Developmental Math An Open Program Unit 7 Geometry First Edition Lesson 1 Basic Geometric Concepts and Figures TOPICS 7.1.1 Figures in 1 and 2 Dimensions 1 Identify and define points, lines, line segments,
Developmental Math An Open Program Unit 7 Geometry First Edition Lesson 1 Basic Geometric Concepts and Figures TOPICS 7.1.1 Figures in 1 and 2 Dimensions 1 Identify and define points, lines, line segments,
Dynamic Bounding Volume Hierarchies. Erin Catto, Blizzard Entertainment
 Dynamic Bounding Volume Hierarchies Erin Catto, Blizzard Entertainment 1 This is one of my favorite Overwatch maps: BlizzardWorld. This is the spawn area inside the Hearthstone Tavern. 2 All the objects
Dynamic Bounding Volume Hierarchies Erin Catto, Blizzard Entertainment 1 This is one of my favorite Overwatch maps: BlizzardWorld. This is the spawn area inside the Hearthstone Tavern. 2 All the objects
Collision Detection of Triangle Meshes using GPU
 Collision Detection of Triangle Meshes using GPU Nils Bäckman March 13, 2011 Master s Thesis in Computing Science, 30 ECTS credits Supervisor at CS-UmU: Daniel Sjölie Examiner: Fredrik Georgsson Umeå University
Collision Detection of Triangle Meshes using GPU Nils Bäckman March 13, 2011 Master s Thesis in Computing Science, 30 ECTS credits Supervisor at CS-UmU: Daniel Sjölie Examiner: Fredrik Georgsson Umeå University
Spatial Data Structures
 15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) March 28, 2002 [Angel 8.9] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) March 28, 2002 [Angel 8.9] Frank Pfenning Carnegie
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Lecture 3: Art Gallery Problems and Polygon Triangulation
 EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
Polygon decomposition. Motivation: Art gallery problem
 CG Lecture 3 Polygon decomposition 1. Polygon triangulation Triangulation theory Monotone polygon triangulation 2. Polygon decomposition into monotone pieces 3. Trapezoidal decomposition 4. Convex decomposition
CG Lecture 3 Polygon decomposition 1. Polygon triangulation Triangulation theory Monotone polygon triangulation 2. Polygon decomposition into monotone pieces 3. Trapezoidal decomposition 4. Convex decomposition
Properties of a Circle Diagram Source:
 Properties of a Circle Diagram Source: http://www.ricksmath.com/circles.html Definitions: Circumference (c): The perimeter of a circle is called its circumference Diameter (d): Any straight line drawn
Properties of a Circle Diagram Source: http://www.ricksmath.com/circles.html Definitions: Circumference (c): The perimeter of a circle is called its circumference Diameter (d): Any straight line drawn
Math 113 Exam 1 Practice
 Math Exam Practice January 6, 00 Exam will cover sections 6.-6.5 and 7.-7.5 This sheet has three sections. The first section will remind you about techniques and formulas that you should know. The second
Math Exam Practice January 6, 00 Exam will cover sections 6.-6.5 and 7.-7.5 This sheet has three sections. The first section will remind you about techniques and formulas that you should know. The second
l Without collision detection (CD), it is practically impossible to construct e.g., games, movie production tools (e.g., Avatar)
, it is practically impossible to construct e.g., games, movie production tools (e.g., Avatar)") Collision Detection Originally created by Tomas Akenine-Möller Updated by Ulf Assarsson Department of Computer Engineering Chalmers University of Technology Introduction l Without collision detection (CD),
Collision Detection Originally created by Tomas Akenine-Möller Updated by Ulf Assarsson Department of Computer Engineering Chalmers University of Technology Introduction l Without collision detection (CD),
CMSC 425: Lecture 10 Geometric Data Structures for Games: Index Structures Tuesday, Feb 26, 2013
 CMSC 2: Lecture 10 Geometric Data Structures for Games: Index Structures Tuesday, Feb 2, 201 Reading: Some of today s materials can be found in Foundations of Multidimensional and Metric Data Structures,
CMSC 2: Lecture 10 Geometric Data Structures for Games: Index Structures Tuesday, Feb 2, 201 Reading: Some of today s materials can be found in Foundations of Multidimensional and Metric Data Structures,
Grade 6 Math Circles October 16 & Non-Euclidean Geometry and the Globe
 Faculty of Mathematics Waterloo, Ontario N2L 3G1 Centre for Education in Mathematics and Computing Grade 6 Math Circles October 16 & 17 2018 Non-Euclidean Geometry and the Globe (Euclidean) Geometry Review:
Faculty of Mathematics Waterloo, Ontario N2L 3G1 Centre for Education in Mathematics and Computing Grade 6 Math Circles October 16 & 17 2018 Non-Euclidean Geometry and the Globe (Euclidean) Geometry Review:
Topics. Ray Tracing II. Transforming objects. Intersecting transformed objects
 Topics Ray Tracing II CS 4620 ations in ray tracing ing objects ation hierarchies Ray tracing acceleration structures Bounding volumes Bounding volume hierarchies Uniform spatial subdivision Adaptive spatial
Topics Ray Tracing II CS 4620 ations in ray tracing ing objects ation hierarchies Ray tracing acceleration structures Bounding volumes Bounding volume hierarchies Uniform spatial subdivision Adaptive spatial
Acceleration Data Structures
 CT4510: Computer Graphics Acceleration Data Structures BOCHANG MOON Ray Tracing Procedure for Ray Tracing: For each pixel Generate a primary ray (with depth 0) While (depth < d) { Find the closest intersection
CT4510: Computer Graphics Acceleration Data Structures BOCHANG MOON Ray Tracing Procedure for Ray Tracing: For each pixel Generate a primary ray (with depth 0) While (depth < d) { Find the closest intersection
Ray Tracing Basics I. Computer Graphics as Virtual Photography. camera (captures light) real scene. photo. Photographic print. Photography: processing
 real scene. photo. Photographic print. Photography: processing") Ray Tracing Basics I Computer Graphics as Virtual Photography Photography: real scene camera (captures light) photo processing Photographic print processing Computer Graphics: 3D models camera model (focuses
Ray Tracing Basics I Computer Graphics as Virtual Photography Photography: real scene camera (captures light) photo processing Photographic print processing Computer Graphics: 3D models camera model (focuses
Announcements. Written Assignment2 is out, due March 8 Graded Programming Assignment2 next Tuesday
 Announcements Written Assignment2 is out, due March 8 Graded Programming Assignment2 next Tuesday 1 Spatial Data Structures Hierarchical Bounding Volumes Grids Octrees BSP Trees 11/7/02 Speeding Up Computations
Announcements Written Assignment2 is out, due March 8 Graded Programming Assignment2 next Tuesday 1 Spatial Data Structures Hierarchical Bounding Volumes Grids Octrees BSP Trees 11/7/02 Speeding Up Computations
Ray Tracing. Cornell CS4620/5620 Fall 2012 Lecture Kavita Bala 1 (with previous instructors James/Marschner)
") CS4620/5620: Lecture 37 Ray Tracing 1 Announcements Review session Tuesday 7-9, Phillips 101 Posted notes on slerp and perspective-correct texturing Prelim on Thu in B17 at 7:30pm 2 Basic ray tracing Basic
CS4620/5620: Lecture 37 Ray Tracing 1 Announcements Review session Tuesday 7-9, Phillips 101 Posted notes on slerp and perspective-correct texturing Prelim on Thu in B17 at 7:30pm 2 Basic ray tracing Basic
Overview. Collision detection. Collision detection. Brute force collision detection. Brute force collision detection. Motivation
 Overview Collision detection Alan Liu aliu@simcen.usuhs.mil Surgical Simulation Laboratory National Capital Area Medical Simulation Center Uniformed Services University of the Health Sciences http://simcen.usuhs.mil/mmvr2002
Overview Collision detection Alan Liu aliu@simcen.usuhs.mil Surgical Simulation Laboratory National Capital Area Medical Simulation Center Uniformed Services University of the Health Sciences http://simcen.usuhs.mil/mmvr2002
Bridges To Computing
 Bridges To Computing General Information: This document was created for use in the "Bridges to Computing" project of Brooklyn College. You are invited and encouraged to use this presentation to promote
Bridges To Computing General Information: This document was created for use in the "Bridges to Computing" project of Brooklyn College. You are invited and encouraged to use this presentation to promote
9. Visible-Surface Detection Methods
 9. Visible-Surface Detection Methods More information about Modelling and Perspective Viewing: Before going to visible surface detection, we first review and discuss the followings: 1. Modelling Transformation:
9. Visible-Surface Detection Methods More information about Modelling and Perspective Viewing: Before going to visible surface detection, we first review and discuss the followings: 1. Modelling Transformation:
6 Randomized rounding of semidefinite programs
 6 Randomized rounding of semidefinite programs We now turn to a new tool which gives substantially improved performance guarantees for some problems We now show how nonlinear programming relaxations can
6 Randomized rounding of semidefinite programs We now turn to a new tool which gives substantially improved performance guarantees for some problems We now show how nonlinear programming relaxations can
1 Proximity via Graph Spanners
 CS273: Algorithms for Structure Handout # 11 and Motion in Biology Stanford University Tuesday, 4 May 2003 Lecture #11: 4 May 2004 Topics: Proximity via Graph Spanners Geometric Models of Molecules, I
CS273: Algorithms for Structure Handout # 11 and Motion in Biology Stanford University Tuesday, 4 May 2003 Lecture #11: 4 May 2004 Topics: Proximity via Graph Spanners Geometric Models of Molecules, I
Grids Geometry Computational Geometry
 Grids Geometry Computational Geometry Grids You will encounter many problems whose solutions need grid representation map VLSI layout the most natural way to carve space into regions regular pattern rectangular
Grids Geometry Computational Geometry Grids You will encounter many problems whose solutions need grid representation map VLSI layout the most natural way to carve space into regions regular pattern rectangular
References. Additional lecture notes for 2/18/02.
 References Additional lecture notes for 2/18/02. I-COLLIDE: Interactive and Exact Collision Detection for Large-Scale Environments, by Cohen, Lin, Manocha & Ponamgi, Proc. of ACM Symposium on Interactive
References Additional lecture notes for 2/18/02. I-COLLIDE: Interactive and Exact Collision Detection for Large-Scale Environments, by Cohen, Lin, Manocha & Ponamgi, Proc. of ACM Symposium on Interactive
From Vertices To Fragments-1
 From Vertices To Fragments-1 1 Objectives Clipping Line-segment clipping polygon clipping 2 Overview At end of the geometric pipeline, vertices have been assembled into primitives Must clip out primitives
From Vertices To Fragments-1 1 Objectives Clipping Line-segment clipping polygon clipping 2 Overview At end of the geometric pipeline, vertices have been assembled into primitives Must clip out primitives
Scene Management. Video Game Technologies 11498: MSc in Computer Science and Engineering 11156: MSc in Game Design and Development
 Video Game Technologies 11498: MSc in Computer Science and Engineering 11156: MSc in Game Design and Development Chap. 5 Scene Management Overview Scene Management vs Rendering This chapter is about rendering
Video Game Technologies 11498: MSc in Computer Science and Engineering 11156: MSc in Game Design and Development Chap. 5 Scene Management Overview Scene Management vs Rendering This chapter is about rendering
Basic and Intermediate Math Vocabulary Spring 2017 Semester
 Digit A symbol for a number (1-9) Whole Number A number without fractions or decimals. Place Value The value of a digit that depends on the position in the number. Even number A natural number that is
Digit A symbol for a number (1-9) Whole Number A number without fractions or decimals. Place Value The value of a digit that depends on the position in the number. Even number A natural number that is
1.OA.1. 1.OA.2 MP: Make sense of problems and persevere in solving them MP: Model with mathematics. Common Core Institute
 Operations and Cluster: Represent and solve problems involving addition and subtraction. 1.OA.1: Use addition and subtraction within 20 to solve word problems involving situations of adding to, taking
Operations and Cluster: Represent and solve problems involving addition and subtraction. 1.OA.1: Use addition and subtraction within 20 to solve word problems involving situations of adding to, taking
Chapter 8. Voronoi Diagrams. 8.1 Post Oce Problem
 Chapter 8 Voronoi Diagrams 8.1 Post Oce Problem Suppose there are n post oces p 1,... p n in a city. Someone who is located at a position q within the city would like to know which post oce is closest
Chapter 8 Voronoi Diagrams 8.1 Post Oce Problem Suppose there are n post oces p 1,... p n in a city. Someone who is located at a position q within the city would like to know which post oce is closest
Polygon Triangulation
 Polygon Triangulation The problem: Triangulate a given polygon. (output a set of diagonals that partition the polygon into triangles). Computational Geometry [csci 3250] Polygon Triangulation Laura Toma
Polygon Triangulation The problem: Triangulate a given polygon. (output a set of diagonals that partition the polygon into triangles). Computational Geometry [csci 3250] Polygon Triangulation Laura Toma
Principles of Computer Game Design and Implementation. Revision Lecture
 Principles of Computer Game Design and Implementation Revision Lecture Introduction Brief history; game genres Game structure A series of interesting choices Series of convexities Variable difficulty increase
Principles of Computer Game Design and Implementation Revision Lecture Introduction Brief history; game genres Game structure A series of interesting choices Series of convexities Variable difficulty increase
Mathematics Curriculum
 6 G R A D E Mathematics Curriculum GRADE 6 5 Table of Contents 1... 1 Topic A: Area of Triangles, Quadrilaterals, and Polygons (6.G.A.1)... 11 Lesson 1: The Area of Parallelograms Through Rectangle Facts...
6 G R A D E Mathematics Curriculum GRADE 6 5 Table of Contents 1... 1 Topic A: Area of Triangles, Quadrilaterals, and Polygons (6.G.A.1)... 11 Lesson 1: The Area of Parallelograms Through Rectangle Facts...
Chapter 11 Arc Extraction and Segmentation
 Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
Mathematical Approaches for Collision Detection in Fundamental Game Objects
 Mathematical Approaches for Collision Detection in Fundamental Game Objects Weihu Hong 1, Junfeng Qu 2, Mingshen Wu 3 1 Department of Mathematics, Clayton State University, Morrow, GA, 30260 2 Department
Mathematical Approaches for Collision Detection in Fundamental Game Objects Weihu Hong 1, Junfeng Qu 2, Mingshen Wu 3 1 Department of Mathematics, Clayton State University, Morrow, GA, 30260 2 Department
3.7. Vertex and tangent
 3.7. Vertex and tangent Example 1. At the right we have drawn the graph of the cubic polynomial f(x) = x 2 (3 x). Notice how the structure of the graph matches the form of the algebraic expression. The
3.7. Vertex and tangent Example 1. At the right we have drawn the graph of the cubic polynomial f(x) = x 2 (3 x). Notice how the structure of the graph matches the form of the algebraic expression. The
Ray shooting from convex ranges
 Discrete Applied Mathematics 108 (2001) 259 267 Ray shooting from convex ranges Evangelos Kranakis a, Danny Krizanc b, Anil Maheshwari a;, Jorg-Rudiger Sack a, Jorge Urrutia c a School of Computer Science,
Discrete Applied Mathematics 108 (2001) 259 267 Ray shooting from convex ranges Evangelos Kranakis a, Danny Krizanc b, Anil Maheshwari a;, Jorg-Rudiger Sack a, Jorge Urrutia c a School of Computer Science,
Objects DO overlap. Objects DO NOT overlap. No calculations needed.
 Physically Based Modeling for Interactive Simulation and Games Scribe Notes for the lecture on February 23rd Collision Detection Spring 2011 Recep Doga Siyli Collision detection involves "computational
Physically Based Modeling for Interactive Simulation and Games Scribe Notes for the lecture on February 23rd Collision Detection Spring 2011 Recep Doga Siyli Collision detection involves "computational
Advanced Ray Tracing
 Advanced Ray Tracing Thanks to Fredo Durand and Barb Cutler The Ray Tree Ni surface normal Ri reflected ray Li shadow ray Ti transmitted (refracted) ray 51 MIT EECS 6.837, Cutler and Durand 1 Ray Tree
Advanced Ray Tracing Thanks to Fredo Durand and Barb Cutler The Ray Tree Ni surface normal Ri reflected ray Li shadow ray Ti transmitted (refracted) ray 51 MIT EECS 6.837, Cutler and Durand 1 Ray Tree
Today. Acceleration Data Structures for Ray Tracing. Cool results from Assignment 2. Last Week: Questions? Schedule
 Today Acceleration Data Structures for Ray Tracing Cool results from Assignment 2 Last Week: koi seantek Ray Tracing Shadows Reflection Refraction Local Illumination Bidirectional Reflectance Distribution
Today Acceleration Data Structures for Ray Tracing Cool results from Assignment 2 Last Week: koi seantek Ray Tracing Shadows Reflection Refraction Local Illumination Bidirectional Reflectance Distribution
Physically-Based Laser Simulation
 Physically-Based Laser Simulation Greg Reshko Carnegie Mellon University reshko@cs.cmu.edu Dave Mowatt Carnegie Mellon University dmowatt@andrew.cmu.edu Abstract In this paper, we describe our work on
Physically-Based Laser Simulation Greg Reshko Carnegie Mellon University reshko@cs.cmu.edu Dave Mowatt Carnegie Mellon University dmowatt@andrew.cmu.edu Abstract In this paper, we describe our work on