Computer Simulation And Modeling
|
|
|
- Gwendoline Campbell
- 6 years ago
- Views:
Transcription
1 Computer Simulation And Modeling The key to increased productivity in Scientific and Engineering analysis Professor Ralph C. Huntsinger California State University, Chico USA Bialystok Technical University POLAND
2 Computer Modeling and Simulation The use of simulation is as old as the practice of engineering itself, what has been very useful is the use of the computer to assist one in the analysis of large complex engineering and scientific problems. Lately the advent of special high level computer software packages has made the use of the computer even easier and has increased the productivity of the scientists and engineers that use these tools. Many of these software tools were very specialized and applied to a narrow subject field. They are quite useful, however, it is very difficult to apply them to another similar area.
3 Computer Modeling and Simulation The latest development is the appearance of several general purpose high level software packages that are able to be applied to any problem of mathematical modeling that contains non-linear, non-homogeneous, simultaneous, high order, ordinary and parabolic partial, differential equations with associated algebraic equations and discontinuities. This is a real productivity booster as these packages come with graphical user interfaces (GUI s) and statistical and engineering analysis tools to form an intelligent simulation environment.
4 Computer Simulation and Modeling of Dynamic Systems Computer Simulation can be used to represent in great detail the performance of real world systems which are often very complex (e.g. space craft, control systems, mechanical and electrical systems, etc.) Simulation may be used as an aid to design, to diagnose the cause of system malfunction, to evaluate performance under fault conditions, for operator training, as embedded systems for predictive control, or to gain a deeper understanding of the dynamics of an existing or proposed dynamic system.
5 Computer Modeling and Simulation Intelligent Simulation Environment This special environment includes specialized computer languages that make modeling and simulation of complex dynamic systems a straight forward and easy task. The time to analyze a complex system is reduced many times by a factor of ten or more. This leaves the scientist and engineer more time to think about the real problem instead of spending most of the time on the details of the solution.
6 Computer Simulation and Modeling High-level continuous systems simulation languages are application-oriented software systems designed to assist Engineers and Scientist to mathematically model and analyze the behavior of piecewise-continuous systems described by differential equations. For the system analyst, these languages provide a straight forward, easy to use analytical tool for the simulation of dynamic systems. Powerful systems-oriented functions coupled with extensive man-machine inter-active capabilities allow the user to concentrate on his/her simulation studies with minimal burden from the computer system.
7 ESL The European Space Agency Simulation Language. One of the great features of ESL is its ability to handle discontinuities accurately. This was one of the European Space Agencies original specifications as when a thruster on a satellite is fired it must happen at the specified time and not at the nearest integration interval. Examples of the use of ESL are the simulation of a six legged robot combined with 3D animated graphics with a human controller in the loop and the entire system running on multiple platforms in real time, as a training simulator for a process control filtering system in a large water treatment plant, and of course for satellite orbit analysis.
8 ESL program sample study model rocket( real: max_ht := real: FUELo); -- Output max height, input initial fuel. real: height,drag,thrust,velocity,fuel,mass; constant real: G/9.81/,Mrk/300.0/,burn/20.0/; logical: power, done/false/; initial --Initial conditions. height:= 0.0; height':= 0.0; FUEL:= FUELo; max_ht:= 0.0;
9 ESL program sample dynamic --Rocket dynamics. velocity:= height'; -- Drag is proportional to velocity squared. drag:= 0.5 * velocity * abs(velocity); -- Mass of rocket and its current fuel. Mass:= Mrk + FUEL; power:= FUEL > 0.0; -- Thrust is constant until fuel exhausted. thrust:= if power then else 0.0;
10 ESL program sample -- Flight equation. height'':= (thrust - drag)/mass - G; -- Fuel Mass equation, fuel burn constant. FUEL':= if power then -burn else 0.0; -- Detect maximum height. when height' < 0.0 then done:= true; max_ht:= height; -- record the max. end_when;
11 ESL program sample -- Save results for later analysis by DISP. prepare "rocket",t,height,velocity,thrust, FUEL,drag,Mass; terminate done; --when rocket starts decent. communication Tabulate t,height,velocity; end rocket;
12 ESL program sample -- Experiment real: FUELo, max_ht; -- Set integration parameters algo:= rk5; cint:= 15.0; tfin:= 120.0; -- Do simulation for varying initial fuel. for FUELo:= step loop -- Call the model to do a simulation run. rocket(max_ht := FUELo); print "With fuel ",FUELo:6.1," kg", " height achieved was ",max_ht:-10.1," m."; end_loop; end_study
13 The European Space Agency Simulation language (ESL) The European Space Agency Simulation language (ESL) was originally written to meet the simulation requirements of the European Space Agency. It started out as a general purpose Continuous Systems Simulation Language (CSSL) and can still be used for that purpose. It has a comprehensive supporting software environment and it can be used in any field where dynamic systems are studied and their simulations need to be used.
14 Continuous Systems Simulation Language Version Four CSSL-IV is a user-oriented software system designed to support analytical simulation. Availability, ease of use, and powerful support tools allow CSSL-IV to be applied effectively to a broad range of technical problems. Application areas range from aircraft flight dynamics, nuclear reactors, chemical processes, and physiological dynamics to a wide variety of control systems. CSSL-IV provides access to many powerful programming tools which speed simulation development and verification. Powerful systems-oriented functions coupled with extensive man-machine inter-active capabilities allow the user to concentrate on his/her simulation studies with minimal burden from the computer system. I
15 ACSL ACSL (pronounced "axle") is an Advanced Continuous Simulation Language. It was introduced 25 years ago, as a commercially available, modeling and simulation language designed for simulating continuous systems. Based on the CSSL (Continuous System Simulation Language) standard, established by the Technical Committee of the Society for Modeling and Computer Simulation International, [SCS].
16 Advanced Continuous Simulation Language ACSL ACSL Sim was designed to help the engineer or scientist, mathematically model and analyze the behavior of a continuous system described by time-dependent, nonlinear differential equations and/or transfer functions. Although continuous systems by their nature are time-dependent, ACSL Sim lets you designate the independent variable as something other than time, such as distance or angle. This gives the user the flexibility to model a multitude of dynamic systems.

17 ACSL screen picture
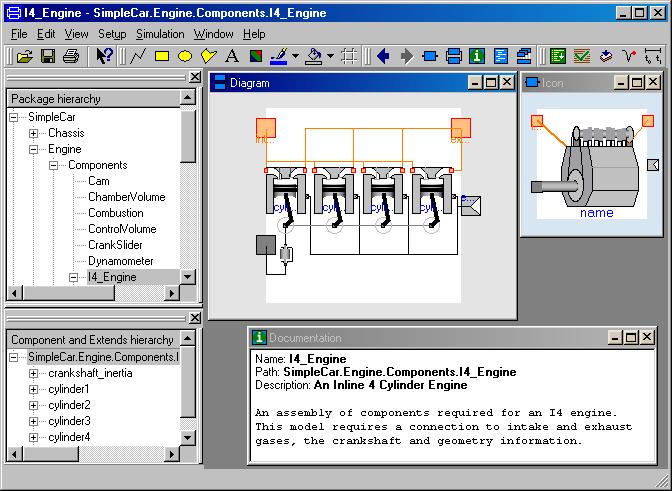
18 Modelica Dymola Modelica is a bit of a paradigm shift from the previous generation of Modeling languages. The language standard returns to the original concept of the "equation" where arbitrary expressions can appear on both sides of the equals sign. (e.g. r*i = v) The Modelica syntax was designed to support symbolic manipulation of model equations in order to generate the set of assignment statements used during the simulation.
19 Modelica Dymola When speaking of Dymola model definitions, one uses the terms component (not block), connectors (not ports) and connections (not wires). This is to differentiate Dymola from the previous generation of graphical modeling systems which are block diagrams. Blocks are characterized by directed flow (wires with arrows) while components are characterized by connections (wires without arrows) defining the coupling of connectors of components Components contain either graphical models in a hierarchical model structure or Modelica code.
")
20 Modelica (Simulink) Diagram
21 Modelica Dymola Connectors declare the set of component variables which can be connected to other components. It is here that the concept of efforts and flows becomes important. The "flow" keyword prefix to a declaration means that all connected flows must sum to zero. (e.g. Kirchoff's current law). Examples of flow variables include forces, torques, electric current and hydraulic fluid. Without the "flow" prefix, a connector variable is presumed to be an effort. Connected efforts must be set equal to each other. Examples of efforts include angular rates, voltage and pressure.
22 Dymola 5
23 Modelica Dymola Symbolic manipulation can also solve or simplify differential algebraic equations (DAE) of any order at translation time, rather than solving such problems numerically when running the simulation. The performance savings can be significant for systems modeled in terms of DAE's (multibodymechanical systems, mechatronic systems, hydraulics, electronics)
24 Computer Simulation and Modeling CSSL s are a useful productivity increasing mechanism for the busy engineer and scientist. They allow one to work smarter not harder in the solution of complex dynamic systems. Instead of writing lots of computer code and debugging long involved programs, one can describe the system with one of these software packages in a short time and the detailed code is generated automatically. More time can be spent thinking about the real problem instead of working on the details of the numerical analysis and the computer coding.
25 Computer Simulation and Modeling of Dynamic Systems Solving scientific and engineering problems should be fun and not a tedious chore. Modern high level computer simulation environments make this a reality. However, always remember, Computer Simulation is a hopeful fake when the real thing is just too much Quote: John McLeod, P.E. Founder of the Society for Modeling and Simulation International
Design optimisation of industrial robots using the Modelica multi-physics modeling language
 Design optimisation of industrial robots using the Modelica multi-physics modeling language A. Kazi, G. Merk, M. Otter, H. Fan, (ArifKazi, GuentherMerk)@kuka-roboter.de (Martin.Otter, Hui.Fan)@dlr.de KUKA
Design optimisation of industrial robots using the Modelica multi-physics modeling language A. Kazi, G. Merk, M. Otter, H. Fan, (ArifKazi, GuentherMerk)@kuka-roboter.de (Martin.Otter, Hui.Fan)@dlr.de KUKA
Using RecurDyn. Contents
 Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
DYNAMICS OF SPACE ROBOTIC ARM DURING INTERACTIONS WITH NON COOPERATIVE OBJECTS
 DYNAMICS OF SPACE ROBOTIC ARM DURING INTERACTIONS WITH NON COOPERATIVE OBJECTS Karol Seweryn 1, Marek Banaszkiewicz 1, Bernd Maediger 2, Tomasz Rybus 1, Josef Sommer 2 1 Space Research Centre of the Polish
DYNAMICS OF SPACE ROBOTIC ARM DURING INTERACTIONS WITH NON COOPERATIVE OBJECTS Karol Seweryn 1, Marek Banaszkiewicz 1, Bernd Maediger 2, Tomasz Rybus 1, Josef Sommer 2 1 Space Research Centre of the Polish
1. INTRODUCTION. Constrained Control Allocation for Systems with Redundant Control Effectors
 1. INTRODUCTION Control allocation algorithms determine how the controls of a system should be positioned so that they produce some desired effect. Constrained controls have limits on their maximum positions
1. INTRODUCTION Control allocation algorithms determine how the controls of a system should be positioned so that they produce some desired effect. Constrained controls have limits on their maximum positions
Design and Development of Unmanned Tilt T-Tri Rotor Aerial Vehicle
 Design and Development of Unmanned Tilt T-Tri Rotor Aerial Vehicle K. Senthil Kumar, Mohammad Rasheed, and T.Anand Abstract Helicopter offers the capability of hover, slow forward movement, vertical take-off
Design and Development of Unmanned Tilt T-Tri Rotor Aerial Vehicle K. Senthil Kumar, Mohammad Rasheed, and T.Anand Abstract Helicopter offers the capability of hover, slow forward movement, vertical take-off
Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic
 Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic Günther Zauner 1,2, Daniel Leitner 3, Felix Breitenecker 1 1 Vienna University of Technology, Wiedner Hauptstr.
Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic Günther Zauner 1,2, Daniel Leitner 3, Felix Breitenecker 1 1 Vienna University of Technology, Wiedner Hauptstr.
PRODAS Newsletter. Announcing the Release of PRODAS Version 3.6. MATLAB/Simulink Trajectory Module
 PRODAS Newsletter If You Can t Get a Bigger Target Fall 2011 Announcing the Release of PRODAS Version 3.6 As times change, so do the tools we use to do our work. As Arrow Tech gets deeper and deeper into
PRODAS Newsletter If You Can t Get a Bigger Target Fall 2011 Announcing the Release of PRODAS Version 3.6 As times change, so do the tools we use to do our work. As Arrow Tech gets deeper and deeper into
Introduction to Control Systems Design
 Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
AN INTEGRATED MODELICA ENVIRONMENT FOR MODELING, DOCUMENTATION AND SIMULATION
 Accepted for publication in Proceedings of The 1998 Summer Computer Simulation Conference (SCSC '98) July 19-22, 1998, Reno, Nevada AN INTEGRATED MODELICA ENVIRONMENT FOR MODELING, DOCUMENTATION AND SIMULATION
Accepted for publication in Proceedings of The 1998 Summer Computer Simulation Conference (SCSC '98) July 19-22, 1998, Reno, Nevada AN INTEGRATED MODELICA ENVIRONMENT FOR MODELING, DOCUMENTATION AND SIMULATION
Modelica. Language, Libraries, Tools, Workshop and EU-Project RealSim
 Modelica Language, Libraries, Tools, Workshop and EU-Project RealSim by Martin Otter 1, Hilding Elmqvist 2 German Aerospace Center, Oberpfaffenhofen, Germany and Dynasim AB, Lund, Sweden December 18, 2000
Modelica Language, Libraries, Tools, Workshop and EU-Project RealSim by Martin Otter 1, Hilding Elmqvist 2 German Aerospace Center, Oberpfaffenhofen, Germany and Dynasim AB, Lund, Sweden December 18, 2000
Multicomputer Research Desks for Simulation and Development of Control Systems
 Proceedings of the 17th World Congress The International Federation of Automatic Control Multicomputer Research Desks for Simulation and Development of Control Systems M.Kh. Dorri A.A. Roshchin Institute
Proceedings of the 17th World Congress The International Federation of Automatic Control Multicomputer Research Desks for Simulation and Development of Control Systems M.Kh. Dorri A.A. Roshchin Institute
Simulation-Based Design of Robotic Systems
 Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
THE STUDY OF SLIDER CRANK MECHANISM USING MATLAB AND SCILAB
 THE STUDY OF SLIDER CRANK MECHANISM USING MATLAB AND SCILAB 1 Ioan Sorin Șorlei, 2 Adriana Elena Cernat, 3 Ciprian Ion Rizescu, 4 Dana Rizescu 1,2,3,4 University of POLITEHNNICA Bucharest/ Department of
THE STUDY OF SLIDER CRANK MECHANISM USING MATLAB AND SCILAB 1 Ioan Sorin Șorlei, 2 Adriana Elena Cernat, 3 Ciprian Ion Rizescu, 4 Dana Rizescu 1,2,3,4 University of POLITEHNNICA Bucharest/ Department of
Lecture 1 GENERAL INTRODUCTION: HISTORICAL BACKGROUND AND SPECTRUM OF APPLICATIONS
 Lecture 1 GENERAL INTRODUCTION: HISTORICAL BACKGROUND AND SPECTRUM OF APPLICATIONS 1.1 INTRODUCTION Analysis of physical problems in any area of engineering and science involves a multipronged approach:
Lecture 1 GENERAL INTRODUCTION: HISTORICAL BACKGROUND AND SPECTRUM OF APPLICATIONS 1.1 INTRODUCTION Analysis of physical problems in any area of engineering and science involves a multipronged approach:
Modeling of the wet end part of a paper mill with Dymola
 Mathematics and Computers in Simulation 65 (2004) 31 38 Modeling of the wet end part of a paper mill with Dymola Gianantonio Bortolin a,, Stefan Borg b, Per Olof Gutman c a Optimization and Systems Theory,
Mathematics and Computers in Simulation 65 (2004) 31 38 Modeling of the wet end part of a paper mill with Dymola Gianantonio Bortolin a,, Stefan Borg b, Per Olof Gutman c a Optimization and Systems Theory,
Dynamic Analysis of Manipulator Arm for 6-legged Robot
 American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
MapleSim User's Guide
 MapleSim User's Guide Copyright Maplesoft, a division of Waterloo Maple Inc. 2001-2009 MapleSim User's Guide Copyright Maplesoft, MapleSim, and Maple are all trademarks of Waterloo Maple Inc. Maplesoft,
MapleSim User's Guide Copyright Maplesoft, a division of Waterloo Maple Inc. 2001-2009 MapleSim User's Guide Copyright Maplesoft, MapleSim, and Maple are all trademarks of Waterloo Maple Inc. Maplesoft,
PHY 351/651 LABORATORY 1 Introduction to LabVIEW
 PHY 351/651 LABORATORY 1 Introduction to LabVIEW Introduction Generally speaking, modern data acquisition systems include four basic stages 1 : o o A sensor (or transducer) circuit that transforms a physical
PHY 351/651 LABORATORY 1 Introduction to LabVIEW Introduction Generally speaking, modern data acquisition systems include four basic stages 1 : o o A sensor (or transducer) circuit that transforms a physical
Technical Electives in the Mechanical Engineering Curriculum
 Technical Electives in the Mechanical Engineering Curriculum AAE 25100 Introduction to Aerospace Design AAE 30100 Signal Analysis for Aerospace Engineering AAE 33400 Aerodynamics AAE 33800 Thermal Sciences
Technical Electives in the Mechanical Engineering Curriculum AAE 25100 Introduction to Aerospace Design AAE 30100 Signal Analysis for Aerospace Engineering AAE 33400 Aerodynamics AAE 33800 Thermal Sciences
Modeling and control of a demonstrative prototype for platform multi-launcher rocket system using Lagrange s equation and CATIA simulation
 Modeling and control of a demonstrative prototype for platform multi-launcher rocket system using Lagrange s equation and CATIA simulation Parkpoom Chokchairungroj 1, Narongkorn Dernlugkam 2 Defence Technology
Modeling and control of a demonstrative prototype for platform multi-launcher rocket system using Lagrange s equation and CATIA simulation Parkpoom Chokchairungroj 1, Narongkorn Dernlugkam 2 Defence Technology
Graphing on Excel. Open Excel (2013). The first screen you will see looks like this (it varies slightly, depending on the version):
. The first screen you will see looks like this (it varies slightly, depending on the version):") Graphing on Excel Open Excel (2013). The first screen you will see looks like this (it varies slightly, depending on the version): The first step is to organize your data in columns. Suppose you obtain
Graphing on Excel Open Excel (2013). The first screen you will see looks like this (it varies slightly, depending on the version): The first step is to organize your data in columns. Suppose you obtain
Eng Ship Structures 1 L E C T U R E 1 0 : F I N I T E E L E M E N T T E C H N I Q U E S I N S H I P S T R U C T U R A L D E S I G N
 Eng. 6002 Ship Structures 1 L E C T U R E 1 0 : F I N I T E E L E M E N T T E C H N I Q U E S I N S H I P S T R U C T U R A L D E S I G N Contents Introduction Linear Analysis Static Non-linear Analysis
Eng. 6002 Ship Structures 1 L E C T U R E 1 0 : F I N I T E E L E M E N T T E C H N I Q U E S I N S H I P S T R U C T U R A L D E S I G N Contents Introduction Linear Analysis Static Non-linear Analysis
Unit #19 : Functions of Many Variables, and Vectors in R 2 and R 3
 Unit #19 : Functions of Many Variables, and Vectors in R 2 and R 3 Goals: To introduce tangent planes for functions of two variables. To consider functions of more than two variables and their level surfaces.
Unit #19 : Functions of Many Variables, and Vectors in R 2 and R 3 Goals: To introduce tangent planes for functions of two variables. To consider functions of more than two variables and their level surfaces.
Unit 1 Lesson 4 Representing Data. Copyright Houghton Mifflin Harcourt Publishing Company
 Florida Benchmarks SC.6.N.1.1 Define a problem from the sixth grade curriculum, use appropriate reference materials to support scientific understanding, plan and carry out scientific investigation of various
Florida Benchmarks SC.6.N.1.1 Define a problem from the sixth grade curriculum, use appropriate reference materials to support scientific understanding, plan and carry out scientific investigation of various
Announcements: Quiz. Animation, Motion Capture, & Inverse Kinematics. Last Time? Today: How do we Animate? Keyframing. Procedural Animation
 Announcements: Quiz Animation, Motion Capture, & Inverse Kinematics On Friday (3/1), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Announcements: Quiz Animation, Motion Capture, & Inverse Kinematics On Friday (3/1), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Preview. Two-Dimensional Motion and Vectors Section 1. Section 1 Introduction to Vectors. Section 2 Vector Operations. Section 3 Projectile Motion
 Two-Dimensional Motion and Vectors Section 1 Preview Section 1 Introduction to Vectors Section 2 Vector Operations Section 3 Projectile Motion Section 4 Relative Motion Two-Dimensional Motion and Vectors
Two-Dimensional Motion and Vectors Section 1 Preview Section 1 Introduction to Vectors Section 2 Vector Operations Section 3 Projectile Motion Section 4 Relative Motion Two-Dimensional Motion and Vectors
Using Mathcad to Perform Mathematics Charles Nippert
 Using Mathcad to Perform Mathematics Charles Nippert These notes are designed to be an introduction to Mathcad. They all are a quick tour of the principal features of the Mathcad program. To prepare these
Using Mathcad to Perform Mathematics Charles Nippert These notes are designed to be an introduction to Mathcad. They all are a quick tour of the principal features of the Mathcad program. To prepare these
computational Fluid Dynamics - Prof. V. Esfahanian
 Three boards categories: Experimental Theoretical Computational Crucial to know all three: Each has their advantages and disadvantages. Require validation and verification. School of Mechanical Engineering
Three boards categories: Experimental Theoretical Computational Crucial to know all three: Each has their advantages and disadvantages. Require validation and verification. School of Mechanical Engineering
Define the problem and gather relevant data Formulate a mathematical model to represent the problem Develop a procedure for driving solutions to the
 Define the problem and gather relevant data Formulate a mathematical model to represent the problem Develop a procedure for driving solutions to the problem Test the model and refine it as needed Prepare
Define the problem and gather relevant data Formulate a mathematical model to represent the problem Develop a procedure for driving solutions to the problem Test the model and refine it as needed Prepare
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
The Efficient Modelling of Steam Utility Systems
 The Efficient Modelling of Steam Utility Systems Jonathan Currie & David I Wilson Auckland University of Technology Systems Of Interest 2 The Steam Utility System: Steam Boilers Back Pressure Turbines
The Efficient Modelling of Steam Utility Systems Jonathan Currie & David I Wilson Auckland University of Technology Systems Of Interest 2 The Steam Utility System: Steam Boilers Back Pressure Turbines
Local Linearity (Tangent Plane) Unit #19 : Functions of Many Variables, and Vectors in R 2 and R 3
 Unit #19 : Functions of Many Variables, and Vectors in R 2 and R 3") Local Linearity and the Tangent Plane - 1 Unit #19 : Functions of Many Variables, and Vectors in R 2 and R 3 Goals: To introduce tangent planes for functions of two variables. To consider functions of
Local Linearity and the Tangent Plane - 1 Unit #19 : Functions of Many Variables, and Vectors in R 2 and R 3 Goals: To introduce tangent planes for functions of two variables. To consider functions of
Lectures & Excercises
 TLTE.3120 Computer Simulation in Communication and Systems (5 ECTS) http://www.uva.fi/~timan/tlte3120 Lecture 1 9.9.2015 Timo Mantere Professor, Embedded systems University of Vaasa http://www.uva.fi/~timan
TLTE.3120 Computer Simulation in Communication and Systems (5 ECTS) http://www.uva.fi/~timan/tlte3120 Lecture 1 9.9.2015 Timo Mantere Professor, Embedded systems University of Vaasa http://www.uva.fi/~timan
The first thing we ll need is some numbers. I m going to use the set of times and drug concentration levels in a patient s bloodstream given below.
 Graphing in Excel featuring Excel 2007 1 A spreadsheet can be a powerful tool for analyzing and graphing data, but it works completely differently from the graphing calculator that you re used to. If you
Graphing in Excel featuring Excel 2007 1 A spreadsheet can be a powerful tool for analyzing and graphing data, but it works completely differently from the graphing calculator that you re used to. If you
Scientific Computing for Physical Systems. Spring semester, 2018
 Scientific Computing for Physical Systems Spring semester, 2018 Course Goals Learn a programming language (Python) Learn some numerical algorithms (e.g., for solving differential equations) Explore some
Scientific Computing for Physical Systems Spring semester, 2018 Course Goals Learn a programming language (Python) Learn some numerical algorithms (e.g., for solving differential equations) Explore some
Software Review: Ruby Tabulation Software
 Software Review: Ruby Tabulation Software Tags: Research Industry Software-Data Delivery Tools Software-Data Tabulation Data Processing Data Conversion Data Analysis Data Crosstabulation Data Collection
Software Review: Ruby Tabulation Software Tags: Research Industry Software-Data Delivery Tools Software-Data Tabulation Data Processing Data Conversion Data Analysis Data Crosstabulation Data Collection
HYBRID EXPERIMENTING SYSTEM AS AN EXTENSION OF SIMULATION LANGUAGE SIMCOS
 B. Zupančič, M. Jekl, R. Karba. Hybrid Experimenting System as an Extension of Simulation Language Simcos. SAMS, Vol. 20, pp. 161-171, 1995. HYBRID EXPERIMENTING SYSTEM AS AN EXTENSION OF SIMULATION LANGUAGE
B. Zupančič, M. Jekl, R. Karba. Hybrid Experimenting System as an Extension of Simulation Language Simcos. SAMS, Vol. 20, pp. 161-171, 1995. HYBRID EXPERIMENTING SYSTEM AS AN EXTENSION OF SIMULATION LANGUAGE
Quick Start Training Guide
 Quick Start Training Guide Table of Contents 1 INTRODUCTION TO MAPLESIM... 5 1.1 USER INTERFACE... 5 2 WORKING WITH A SAMPLE MODEL... 7 2.1 RUNNING A SIMULATION... 7 2.2 GRAPHICAL OUTPUT... 7 2.3 3D VISUALIZATION...
Quick Start Training Guide Table of Contents 1 INTRODUCTION TO MAPLESIM... 5 1.1 USER INTERFACE... 5 2 WORKING WITH A SAMPLE MODEL... 7 2.1 RUNNING A SIMULATION... 7 2.2 GRAPHICAL OUTPUT... 7 2.3 3D VISUALIZATION...
LEARNING TO PROGRAM WITH MATLAB. Building GUI Tools. Wiley. University of Notre Dame. Craig S. Lent Department of Electrical Engineering
 LEARNING TO PROGRAM WITH MATLAB Building GUI Tools Craig S. Lent Department of Electrical Engineering University of Notre Dame Wiley Contents Preface ix I MATLAB Programming 1 1 Getting Started 3 1.1 Running
LEARNING TO PROGRAM WITH MATLAB Building GUI Tools Craig S. Lent Department of Electrical Engineering University of Notre Dame Wiley Contents Preface ix I MATLAB Programming 1 1 Getting Started 3 1.1 Running
Great Inventions written by Bob Barton
 COMPUTER Great Inventions written by Bob Barton Computers Computers help society function in many vital ways, often without our being aware of them. Computers control traffic lights and factory operations.
COMPUTER Great Inventions written by Bob Barton Computers Computers help society function in many vital ways, often without our being aware of them. Computers control traffic lights and factory operations.
1.2 Numerical Solutions of Flow Problems
 1.2 Numerical Solutions of Flow Problems DIFFERENTIAL EQUATIONS OF MOTION FOR A SIMPLIFIED FLOW PROBLEM Continuity equation for incompressible flow: 0 Momentum (Navier-Stokes) equations for a Newtonian
1.2 Numerical Solutions of Flow Problems DIFFERENTIAL EQUATIONS OF MOTION FOR A SIMPLIFIED FLOW PROBLEM Continuity equation for incompressible flow: 0 Momentum (Navier-Stokes) equations for a Newtonian
Keyboard Velocity Curve Measurements and Implementation. Duane Strong, John Fertig, Si Moorehead.
 Keyboard Velocity Curve Measurements and Implementation Duane Strong, John Fertig, Si Moorehead duanes@strongenging.com 03/13/02 Introduction This document describes the method used to implement keyboard
Keyboard Velocity Curve Measurements and Implementation Duane Strong, John Fertig, Si Moorehead duanes@strongenging.com 03/13/02 Introduction This document describes the method used to implement keyboard
Sensor Accuracy in Vehicle Safety
 Sensor Accuracy in Vehicle Safety Sas Harrison Claytex Services Ltd. Leamington Spa UK Global Business: Software Support Consultancy Training Expertise: Modelica / C++ Software Simulation Libraries Systems
Sensor Accuracy in Vehicle Safety Sas Harrison Claytex Services Ltd. Leamington Spa UK Global Business: Software Support Consultancy Training Expertise: Modelica / C++ Software Simulation Libraries Systems
Automatically improving floating point code
 Automatically improving floating point code Scientists Write Code Every scientist needs to write code Analyze data Simulate models Control experiments Scientists Write Code Every scientist needs to write
Automatically improving floating point code Scientists Write Code Every scientist needs to write code Analyze data Simulate models Control experiments Scientists Write Code Every scientist needs to write
Design of Liquid Level Control System Based on Simulink and PLC
 2017 3rd International Symposium on Mechatronics and Industrial Informatics (ISMII 2017) ISBN: 978-1-60595-501-8 Design of Liquid Level Control System Based on Simulink and PLC Xiuwei FU 1,a, Ying QI 2,b
2017 3rd International Symposium on Mechatronics and Industrial Informatics (ISMII 2017) ISBN: 978-1-60595-501-8 Design of Liquid Level Control System Based on Simulink and PLC Xiuwei FU 1,a, Ying QI 2,b
Introduction to Flash - Creating a Motion Tween
 Introduction to Flash - Creating a Motion Tween This tutorial will show you how to create basic motion with Flash, referred to as a motion tween. Download the files to see working examples or start by
Introduction to Flash - Creating a Motion Tween This tutorial will show you how to create basic motion with Flash, referred to as a motion tween. Download the files to see working examples or start by
Animation, Motion Capture, & Inverse Kinematics. Announcements: Quiz
 Animation, Motion Capture, & Inverse Kinematics Announcements: Quiz On Tuesday (3/10), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Animation, Motion Capture, & Inverse Kinematics Announcements: Quiz On Tuesday (3/10), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Karen Liu associate professor at School of Interactive Computing. Murali Varma graduate student at School of Interactive Computing
 Computer Animation Karen Liu associate professor at School of Interactive Computing Murali Varma graduate student at School of Interactive Computing Administrations http://www.cc.gatech.edu/classes/ay2012/
Computer Animation Karen Liu associate professor at School of Interactive Computing Murali Varma graduate student at School of Interactive Computing Administrations http://www.cc.gatech.edu/classes/ay2012/
N. Gachadoit 1, A. El Hadri 2, A. Benallegue 2, A. Seba 3, B.Vidalie 1
 Advanced modeling with a Symbolic based approach Application to the modeling, control design and real-time control and HIL simulation of a quadrotor helicopter N. Gachadoit 1, A. El Hadri 2, A. Benallegue
Advanced modeling with a Symbolic based approach Application to the modeling, control design and real-time control and HIL simulation of a quadrotor helicopter N. Gachadoit 1, A. El Hadri 2, A. Benallegue
EEN118 LAB FOUR. h = v t ½ g t 2
 EEN118 LAB FOUR In this lab you will be performing a simulation of a physical system, shooting a projectile from a cannon and working out where it will land. Although this is not a very complicated physical
EEN118 LAB FOUR In this lab you will be performing a simulation of a physical system, shooting a projectile from a cannon and working out where it will land. Although this is not a very complicated physical
This is the published version of a paper presented at IEEE PES General Meeting 2013.
 http://www.diva-portal.org This is the published version of a paper presented at IEEE PES General Meeting 2013. Citation for the original published paper: Vanfretti, L., Li, W., Bogodorova, T., Panciatici,
http://www.diva-portal.org This is the published version of a paper presented at IEEE PES General Meeting 2013. Citation for the original published paper: Vanfretti, L., Li, W., Bogodorova, T., Panciatici,
Modeling and Simulation for Heterogeneous systems
 Modeling and Simulation for Heterogeneous systems Hosted Simulation for airvehicle subsystem design Henric Andersson Saab Aerosystems 2008-02-06 My background Control engineer from ISY Linköping University
Modeling and Simulation for Heterogeneous systems Hosted Simulation for airvehicle subsystem design Henric Andersson Saab Aerosystems 2008-02-06 My background Control engineer from ISY Linköping University
Effect of Uncertainties on UCAV Trajectory Optimisation Using Evolutionary Programming
 2007 Information, Decision and Control Effect of Uncertainties on UCAV Trajectory Optimisation Using Evolutionary Programming Istas F Nusyirwan 1, Cees Bil 2 The Sir Lawrence Wackett Centre for Aerospace
2007 Information, Decision and Control Effect of Uncertainties on UCAV Trajectory Optimisation Using Evolutionary Programming Istas F Nusyirwan 1, Cees Bil 2 The Sir Lawrence Wackett Centre for Aerospace
MITOCW ocw f99-lec12_300k
 MITOCW ocw-18.06-f99-lec12_300k This is lecture twelve. OK. We've reached twelve lectures. And this one is more than the others about applications of linear algebra. And I'll confess. When I'm giving you
MITOCW ocw-18.06-f99-lec12_300k This is lecture twelve. OK. We've reached twelve lectures. And this one is more than the others about applications of linear algebra. And I'll confess. When I'm giving you
Web- and System-code Based, Interactive, Nuclear Power Plant Simulators. S. Goodwin Ave, Urbana, IL 61801, USA,
 Web- and System-code Based, Interactive, Nuclear Power Plant Simulators Kyung-Doo Kim 1, Prashant Jain and Rizwan-Uddin 2 1 Korea Atomic Energy Research Institute, 150 Dukjin-dong, Yuseong, Taejeon, 305-353,
Web- and System-code Based, Interactive, Nuclear Power Plant Simulators Kyung-Doo Kim 1, Prashant Jain and Rizwan-Uddin 2 1 Korea Atomic Energy Research Institute, 150 Dukjin-dong, Yuseong, Taejeon, 305-353,
3.1 Quadratic Functions in Vertex Form
 3.1 Quadratic Functions in Vertex Form 1) Identify quadratic functions in vertex form. 2) Determine the effect of a, p, and q on the graph of a quadratic function in vertex form where y = a(x p)² + q 3)
3.1 Quadratic Functions in Vertex Form 1) Identify quadratic functions in vertex form. 2) Determine the effect of a, p, and q on the graph of a quadratic function in vertex form where y = a(x p)² + q 3)
Mathematics Second Practice Test 2 Levels 6-8 Calculator allowed
 Mathematics Second Practice Test 2 Levels 6-8 Calculator allowed Please read this page, but do not open your booklet until your teacher tells you to start. Write your name and the name of your school in
Mathematics Second Practice Test 2 Levels 6-8 Calculator allowed Please read this page, but do not open your booklet until your teacher tells you to start. Write your name and the name of your school in
: What is Finite Element Analysis (FEA)?
?") Q: What is Finite Element Analysis (FEA)? A1: It is a numerical technique for finding approximate solutions of partial differential equations (PDE) as well as of integral equations. The solution approach
Q: What is Finite Element Analysis (FEA)? A1: It is a numerical technique for finding approximate solutions of partial differential equations (PDE) as well as of integral equations. The solution approach
Lab 3: Acceleration of Gravity
 Lab 3: Acceleration of Gravity The objective of this lab exercise is to measure a value for g, the acceleration due to gravity for an object in freefall. For Lab 1 and Lab 2 we used data, from a fictional
Lab 3: Acceleration of Gravity The objective of this lab exercise is to measure a value for g, the acceleration due to gravity for an object in freefall. For Lab 1 and Lab 2 we used data, from a fictional
Partial Differential Equations
 Simulation in Computer Graphics Partial Differential Equations Matthias Teschner Computer Science Department University of Freiburg Motivation various dynamic effects and physical processes are described
Simulation in Computer Graphics Partial Differential Equations Matthias Teschner Computer Science Department University of Freiburg Motivation various dynamic effects and physical processes are described
Last Time? Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS
 MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS Finn CONRAD and Francesco ROLI Department of Mechanical Engineering, Technical University
MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS Finn CONRAD and Francesco ROLI Department of Mechanical Engineering, Technical University
Sample: Do Not Reproduce QUAD4 STUDENT PAGES. QUADRATIC FUNCTIONS AND EQUATIONS Student Pages for Packet 4: Quadratic Functions and Applications
 Name Period Date QUADRATIC FUNCTIONS AND EQUATIONS Student Pages for Packet 4: Quadratic Functions and Applications QUAD 4.1 Vertex Form of a Quadratic Function 1 Explore how changing the values of h and
Name Period Date QUADRATIC FUNCTIONS AND EQUATIONS Student Pages for Packet 4: Quadratic Functions and Applications QUAD 4.1 Vertex Form of a Quadratic Function 1 Explore how changing the values of h and
SIMULINK Tutorial. Select File-New-Model from the menu bar of this window. The following window should now appear.
 SIMULINK Tutorial Simulink is a block-orientated program that allows the simulation of dynamic systems in a block diagram format whether they are linear or nonlinear, in continuous or discrete forms. To
SIMULINK Tutorial Simulink is a block-orientated program that allows the simulation of dynamic systems in a block diagram format whether they are linear or nonlinear, in continuous or discrete forms. To
Solution for Euler Equations Lagrangian and Eulerian Descriptions
 Solution for Euler Equations Lagrangian and Eulerian Descriptions Valdir Monteiro dos Santos Godoi valdir.msgodoi@gmail.com Abstract We find an exact solution for the system of Euler equations, supposing
Solution for Euler Equations Lagrangian and Eulerian Descriptions Valdir Monteiro dos Santos Godoi valdir.msgodoi@gmail.com Abstract We find an exact solution for the system of Euler equations, supposing
Advanced Applications of STAR- CCM+ in Chemical Process Industry Ravindra Aglave Director, Chemical Process Industry
 Advanced Applications of STAR- CCM+ in Chemical Process Industry Ravindra Aglave Director, Chemical Process Industry Outline Notable features released in 2013 Gas Liquid Flows with STAR-CCM+ Packed Bed
Advanced Applications of STAR- CCM+ in Chemical Process Industry Ravindra Aglave Director, Chemical Process Industry Outline Notable features released in 2013 Gas Liquid Flows with STAR-CCM+ Packed Bed
Introduction to Spreadsheets
 Introduction to Spreadsheets Spreadsheets are computer programs that were designed for use in business. However, scientists quickly saw how useful they could be for analyzing data. As the programs have
Introduction to Spreadsheets Spreadsheets are computer programs that were designed for use in business. However, scientists quickly saw how useful they could be for analyzing data. As the programs have
car=1700 FS gear=13.5 Wind: cw=0.33 AutoGear ThrottlePos JMotorPump=0.28 TS Jturbine=0.034 TS 1 Engine converter ECU ControlBox
 Physical Modeling with Modelica and Dymola and Real-Time Simulation with Simulink and Real Time Workshop H. Elmqvist 1, M. Otter 2, and C. Schlegel 2 1 Dynasim AB, Research Park Ideon, S{223 70 Lund, Sweden,
Physical Modeling with Modelica and Dymola and Real-Time Simulation with Simulink and Real Time Workshop H. Elmqvist 1, M. Otter 2, and C. Schlegel 2 1 Dynasim AB, Research Park Ideon, S{223 70 Lund, Sweden,
JARA 2i A MODELICA LIBRARY FOR INTERACTIVE SIMULATION OF PHYSICAL-CHEMICAL PROCESSES
 JARA 2i A MODELICA LIBRARY FOR INTERACTIVE SIMULATION OF PHYSICAL-CHEMICAL PROCESSES Carla Martin, Alfonso Urquia and Sebastian Dormido Dept. Informática y Automática, E.T.S. Ingeniería Informática, U.N.E.D.
JARA 2i A MODELICA LIBRARY FOR INTERACTIVE SIMULATION OF PHYSICAL-CHEMICAL PROCESSES Carla Martin, Alfonso Urquia and Sebastian Dormido Dept. Informática y Automática, E.T.S. Ingeniería Informática, U.N.E.D.
STANDARDS OF LEARNING CONTENT REVIEW NOTES ALGEBRA I. 2 nd Nine Weeks,
 STANDARDS OF LEARNING CONTENT REVIEW NOTES ALGEBRA I 2 nd Nine Weeks, 2016-2017 1 OVERVIEW Algebra I Content Review Notes are designed by the High School Mathematics Steering Committee as a resource for
STANDARDS OF LEARNING CONTENT REVIEW NOTES ALGEBRA I 2 nd Nine Weeks, 2016-2017 1 OVERVIEW Algebra I Content Review Notes are designed by the High School Mathematics Steering Committee as a resource for
Swarm of Bees. See a preview animation of the effect to get an idea about what we are creating here:
 Swarm of Bees In this tutorial we are going to use particle flow to create a swarm of flight gifted insectoids swarming towards and around a target. Same as our Ants tutorial, we can use an instance of
Swarm of Bees In this tutorial we are going to use particle flow to create a swarm of flight gifted insectoids swarming towards and around a target. Same as our Ants tutorial, we can use an instance of
Modeling and Simulation in Scilab/Scicos with ScicosLab 4.4
 Modeling and Simulation in Scilab/Scicos with ScicosLab 4.4 Stephen L. Campbell, Jean-Philippe Chancelier and Ramine Nikoukhah Modeling and Simulation in Scilab/Scicos with ScicosLab 4.4 Second Edition
Modeling and Simulation in Scilab/Scicos with ScicosLab 4.4 Stephen L. Campbell, Jean-Philippe Chancelier and Ramine Nikoukhah Modeling and Simulation in Scilab/Scicos with ScicosLab 4.4 Second Edition
Stomp Rocket Lab Physics
 Stomp Rocket Lab Physics Stomp Rockets are plastic projectiles that are launched when a bladder of air is hit or stomped with a foot. Typically the launch angle can be changed, but should be left at 90
Stomp Rocket Lab Physics Stomp Rockets are plastic projectiles that are launched when a bladder of air is hit or stomped with a foot. Typically the launch angle can be changed, but should be left at 90
Dipartimento di Ingegneria Aerospaziale Politecnico di Milano
 Trajectory optimization and real-time simulation for robotics applications Michele Attolico Pierangelo Masarati Paolo Mantegazza Dipartimento di Ingegneria Aerospaziale Politecnico di Milano Multibody
Trajectory optimization and real-time simulation for robotics applications Michele Attolico Pierangelo Masarati Paolo Mantegazza Dipartimento di Ingegneria Aerospaziale Politecnico di Milano Multibody
Getting Started With Linux and Fortran Part 2
 Getting Started With Linux and Fortran Part 2 by Simon Campbell [The K Desktop Environment, one of the many desktops available for Linux] ASP 3012 (Stars) Computer Tutorial 2 1 Contents 1 Some Funky Linux
Getting Started With Linux and Fortran Part 2 by Simon Campbell [The K Desktop Environment, one of the many desktops available for Linux] ASP 3012 (Stars) Computer Tutorial 2 1 Contents 1 Some Funky Linux
Introduction to Simulink
 University College of Southeast Norway Introduction to Simulink Hans-Petter Halvorsen, 2016.11.01 http://home.hit.no/~hansha Preface Simulink, developed by The MathWorks, is a commercial tool for modeling,
University College of Southeast Norway Introduction to Simulink Hans-Petter Halvorsen, 2016.11.01 http://home.hit.no/~hansha Preface Simulink, developed by The MathWorks, is a commercial tool for modeling,
Period #10: Multi dimensional Fluid Flow in Soils (II)
") Period #10: Multi dimensional Fluid Flow in Soils (II) A. Review Our objective is to solve multi dimensional fluid flow problems in soils. Last time, mass conservation and Darcy s Law were used to derive
Period #10: Multi dimensional Fluid Flow in Soils (II) A. Review Our objective is to solve multi dimensional fluid flow problems in soils. Last time, mass conservation and Darcy s Law were used to derive
Cycling Loading Effect on a Solid Propellant Engine Performances Part 2 3D CFD Study and Validation of CFD Results
 Rhodes, Greece, August 0-, 008 Cycling Loading Effect on a Solid Propellant Engine Performances Part 3D CFD Study and Validation of CFD Results ADRIAN ARGHIROPOL, CONSTANTIN ROTARU, DORU SAFTA, FLORIN
Rhodes, Greece, August 0-, 008 Cycling Loading Effect on a Solid Propellant Engine Performances Part 3D CFD Study and Validation of CFD Results ADRIAN ARGHIROPOL, CONSTANTIN ROTARU, DORU SAFTA, FLORIN
EEN118 LAB FOUR. h = v t ½ g t 2
 EEN118 LAB FOUR In this lab you will be performing a simulation of a physical system, shooting a projectile from a cannon and working out where it will land. Although this is not a very complicated physical
EEN118 LAB FOUR In this lab you will be performing a simulation of a physical system, shooting a projectile from a cannon and working out where it will land. Although this is not a very complicated physical
COMP1730/COMP6730 Programming for Scientists. Control, part 2: Iteration
 COMP1730/COMP6730 Programming for Scientists Control, part 2: Iteration Outline * Iteration: The while statement * Simulations. * Common problems with loops. Iteration Program control flow Images from
COMP1730/COMP6730 Programming for Scientists Control, part 2: Iteration Outline * Iteration: The while statement * Simulations. * Common problems with loops. Iteration Program control flow Images from
Advanced Modelica Tutorial Exercises
 Advanced Modelica Tutorial Exercises Hilding Elmqvist, Dynasim Martin Otter, DLR Refine MultiBody/Engine Make Engine example model a reusable component 1. Manage parameters 2. Allow changing number of
Advanced Modelica Tutorial Exercises Hilding Elmqvist, Dynasim Martin Otter, DLR Refine MultiBody/Engine Make Engine example model a reusable component 1. Manage parameters 2. Allow changing number of
PHYSICALLY BASED ANIMATION
 PHYSICALLY BASED ANIMATION CS148 Introduction to Computer Graphics and Imaging David Hyde August 2 nd, 2016 WHAT IS PHYSICS? the study of everything? WHAT IS COMPUTATION? the study of everything? OUTLINE
PHYSICALLY BASED ANIMATION CS148 Introduction to Computer Graphics and Imaging David Hyde August 2 nd, 2016 WHAT IS PHYSICS? the study of everything? WHAT IS COMPUTATION? the study of everything? OUTLINE
Common Technical Issue On I&C
 Common Technical Issue On I&C Chashma Unit-1 and 2 Pakistan by M.Ramzan Tahir IAEA Technical Meeting on Instrumentation and Control in SMRs At VIC Vienna, Austria (21 ~ 24 May, 2013) Contents Plants Design
Common Technical Issue On I&C Chashma Unit-1 and 2 Pakistan by M.Ramzan Tahir IAEA Technical Meeting on Instrumentation and Control in SMRs At VIC Vienna, Austria (21 ~ 24 May, 2013) Contents Plants Design
6.871 Expert System: WDS Web Design Assistant System
 6.871 Expert System: WDS Web Design Assistant System Timur Tokmouline May 11, 2005 1 Introduction Today, despite the emergence of WYSIWYG software, web design is a difficult and a necessary component of
6.871 Expert System: WDS Web Design Assistant System Timur Tokmouline May 11, 2005 1 Introduction Today, despite the emergence of WYSIWYG software, web design is a difficult and a necessary component of
Topic C. Communicating the Precision of Measured Numbers
 Topic C. Communicating the Precision of Measured Numbers C. page 1 of 14 Topic C. Communicating the Precision of Measured Numbers This topic includes Section 1. Reporting measurements Section 2. Rounding
Topic C. Communicating the Precision of Measured Numbers C. page 1 of 14 Topic C. Communicating the Precision of Measured Numbers This topic includes Section 1. Reporting measurements Section 2. Rounding
Teaching Math thru Big Ideas Focusing on Differentiation. Marian Small April 2017 San Diego, CA
 Teaching Math thru Big Ideas Focusing on Differentiation Marian Small April 2017 San Diego, CA Our focus today Differentiation by focusing on big ideas Formative assessment/feedback Planning lessons/units
Teaching Math thru Big Ideas Focusing on Differentiation Marian Small April 2017 San Diego, CA Our focus today Differentiation by focusing on big ideas Formative assessment/feedback Planning lessons/units
Simulation of Articulated Robotic Manipulator & It s Application in Modern Industries
 IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 11, Issue 3 Ver. II (May- Jun. 2014), PP 01-07 Simulation of Articulated Robotic Manipulator & It
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 11, Issue 3 Ver. II (May- Jun. 2014), PP 01-07 Simulation of Articulated Robotic Manipulator & It
b) develop mathematical thinking and problem solving ability.
 develop mathematical thinking and problem solving ability.") Submission for Pre-Calculus MATH 20095 1. Course s instructional goals and objectives: The purpose of this course is to a) develop conceptual understanding and fluency with algebraic and transcendental
Submission for Pre-Calculus MATH 20095 1. Course s instructional goals and objectives: The purpose of this course is to a) develop conceptual understanding and fluency with algebraic and transcendental
Scientific Method and Graphing
 Scientific Method and Graphing Objectives - Students will be able to: 1.Explain what an independent and a dependent variable are. 2.Properly label a data table and graph 3.Create a graph from a data table
Scientific Method and Graphing Objectives - Students will be able to: 1.Explain what an independent and a dependent variable are. 2.Properly label a data table and graph 3.Create a graph from a data table
Lesson 76. Linear Regression, Scatterplots. Review: Shormann Algebra 2, Lessons 12, 24; Shormann Algebra 1, Lesson 94
 Lesson 76 Linear Regression, Scatterplots Review: Shormann Algebra 2, Lessons 12, 24; Shormann Algebra 1, Lesson 94 Tools required: A graphing calculator or some sort of spreadsheet program, like Excel
Lesson 76 Linear Regression, Scatterplots Review: Shormann Algebra 2, Lessons 12, 24; Shormann Algebra 1, Lesson 94 Tools required: A graphing calculator or some sort of spreadsheet program, like Excel
Workpackage 5 - Ordinary Differential Equations
 Mathematics for I Workpackage 5 - Ordinary Differential Equations Introduction During this laboratory you will be introduced to some of Matlab s facilities for solving ordinary differential equations (ode).
Mathematics for I Workpackage 5 - Ordinary Differential Equations Introduction During this laboratory you will be introduced to some of Matlab s facilities for solving ordinary differential equations (ode).
Using the Scaling Equations to Define Experimental Matrices for Software Validation
 Using the Scaling Equations to Define Experimental Matrices for Software Validation Richard R. Schultz, Edwin Harvego, Brian G. Woods, and Yassin Hassan V&V30 Standards Committee Presentation Content Description
Using the Scaling Equations to Define Experimental Matrices for Software Validation Richard R. Schultz, Edwin Harvego, Brian G. Woods, and Yassin Hassan V&V30 Standards Committee Presentation Content Description
Experimental Design and Graphical Analysis of Data
 Experimental Design and Graphical Analysis of Data A. Designing a controlled experiment When scientists set up experiments they often attempt to determine how a given variable affects another variable.
Experimental Design and Graphical Analysis of Data A. Designing a controlled experiment When scientists set up experiments they often attempt to determine how a given variable affects another variable.
Modeling Technical Systems [ ] Mag MA MA Schweiger Gerald TU Graz Spring 2017
![Modeling Technical Systems [ ] Mag MA MA Schweiger Gerald TU Graz Spring 2017](/thumbs/93/112845817.jpg "Modeling Technical Systems [ ] Mag MA MA Schweiger Gerald TU Graz Spring 2017") 1 Modeling Technical Systems [716.055] Mag MA MA Schweiger Gerald TU Graz Spring 2017 Outline Scope of the course Introduction Modelica Basics Introduction to Dymola Scope of the course Introduction to
1 Modeling Technical Systems [716.055] Mag MA MA Schweiger Gerald TU Graz Spring 2017 Outline Scope of the course Introduction Modelica Basics Introduction to Dymola Scope of the course Introduction to
NUMERICAL INTEGRATION - TRAPEZIUM RULE
 Mathematics Revision Guides Numerical Integration using the Trapezium Rule Page of M.K. HOME TUITION Mathematics Revision Guides Level: A-Level Year NUMERICAL INTEGRATION - TRAPEZIUM RULE Version :.4 Date:
Mathematics Revision Guides Numerical Integration using the Trapezium Rule Page of M.K. HOME TUITION Mathematics Revision Guides Level: A-Level Year NUMERICAL INTEGRATION - TRAPEZIUM RULE Version :.4 Date:
MATLAB Programming for Numerical Computation Dr. Niket Kaisare Department Of Chemical Engineering Indian Institute of Technology, Madras
 MATLAB Programming for Numerical Computation Dr. Niket Kaisare Department Of Chemical Engineering Indian Institute of Technology, Madras Module No. #01 Lecture No. #1.1 Introduction to MATLAB programming
MATLAB Programming for Numerical Computation Dr. Niket Kaisare Department Of Chemical Engineering Indian Institute of Technology, Madras Module No. #01 Lecture No. #1.1 Introduction to MATLAB programming
Rotational3D Efficient modelling of 3D effects in rotational mechanics
 Rotational3D - Efficient Modelling of 3D Effects in Rotational Mechanics Rotational3D Efficient modelling of 3D effects in rotational mechanics Johan Andreasson Magnus Gäfvert Modelon AB Ideon Science
Rotational3D - Efficient Modelling of 3D Effects in Rotational Mechanics Rotational3D Efficient modelling of 3D effects in rotational mechanics Johan Andreasson Magnus Gäfvert Modelon AB Ideon Science
Algebra 1 STAAR EOC Review #9 Reporting Category 5: Quadratic and Other Nonlinear Functions
 Name Class Date RC9 A.09B Algebra 1 STAAR EOC Review #9 Reporting Category 5: Quadratic and Other Nonlinear Functions 1. Which shows the functions correctly listed in order from widest to narrowest graph?
Name Class Date RC9 A.09B Algebra 1 STAAR EOC Review #9 Reporting Category 5: Quadratic and Other Nonlinear Functions 1. Which shows the functions correctly listed in order from widest to narrowest graph?