An Introduction to Computational Geometry: Arrangements and Duality
|
|
|
- Stephanie Weaver
- 6 years ago
- Views:
Transcription

1 An Introduction to Computational Geometry: Arrangements and Duality Joseph S. B. Mitchell Stony Brook University Some images from [O Rourke, Computational Geometry in C, 2 nd Edition, Chapter 6]
2 Arrangement of Lines A partition of the plane into vertices, edges, cells, by a finite set of lines. 2
3 [O Rourke, Chapter 6] 3
4 Sign Vectors 2 1 (+,+,+,+,+) 3 (0,-,-,+,+) (+,0,-,0,0) (+,+,-,-,-) 4 (-,-,-,-,-) 5 A partition of the plane into vertices, edges, cells, by a finite set of lines. 4
/2, E=n 2, F=n(n- 1)/2+n+1.")
5 Combinatorics of Arrangements of Lines Arrangement is simple if No 2 lines are parallel; and No 3 lines pass through a common point Theorem 6.2.1: In a simple arrangement of n lines, V=n(n-1)/2, E=n 2, F=n(n- 1)/2+n+1. These are upper bounds in a nonsimple arrangement. 5
6 Proof Consider a simple arrangement; nonsimple arrangements only have fewer vertices, edges and faces 6
7 Proof (cont) Vertices: Every pair of lines defines a unique vertex: {n choose 2} = n(n-1)/2 Edges: Each line is crossed at n-1 distinct points by the other n-1 lines: This yields n edges per line, so n 2 total Faces: Assume: The n lines form a simple arrangement Use Euler (include a vertex at infinity, where all unbounded edges are incident): f- e+v=f-n 2 +(1+n(n-1)/2)=2, so f=1+n+n(n-1)/2 Use sweep argument (as done in class) 7
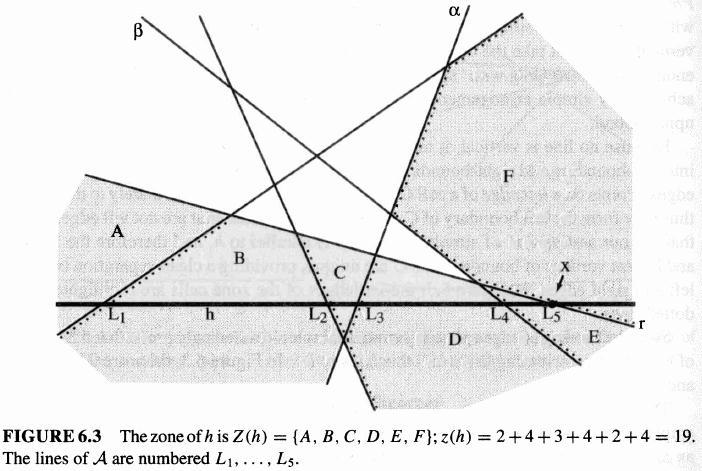
8 Zone of a Line in an Arrangement of Lines The zone, Z(L), of line L in an arrangement of lines is the set of all cells intersected by L. The complexity of the zone, Z(L), is the total number of edges of the cells of the zone. (Some edges may be counted twice.) The zone of the blue line (x-axis) is highlighted in red: It has complexity 15 8
9 Zone Theorem Theorem 6.2.2: The total number of edges in all the cells that intersect any one line L in an arrangement of n lines is O(n). Specifically, Z(L) 6n. 9
10 Zone Theorem: Proof Proof: By induction on n. WLOG: L is horizontal We show that the number of left contributions is at most 3n. Clearly true for n=1. Induction Hypothesis (IH): true for n k. 10
11 Zone Theorem: Proof Consider a set of k+1 lines; remove the one, L k+1, with rightmost crossing along L. When we add L k+1 back, we get at most one new left contribution along it, and potentially split 2 other left contributions. Thus, going from k lines to k+1 lines increases number of left contributions by at most 3: total is at most 3(k+1) for k+1 lines. By induction, we have proved that the number of left contributions is at most 3n, for any n Thus, total zone has at most 6n complexity 11
12 12
13 13
14 Constructing an Arrangement of Lines Corollary to Zone Thm: The arrangement of n lines can be constructed (e.g., in a winged-edge data structure) in time O(n 2 ) Algorithm: Incremental 14
15 Inserting a Line in the Arrangement 15
16 Point-Line Duality Lines dual to the 4 points L : y = 2ax b p : (a,b) Applet: (uses L : y = ax b p : (a,b) ) 16
17 Relationship to Parabola y=x 2 17
18 Example 18
19 Example 19
 passes through the two points D(L 1 ) and D(L 2 ) 5.")
20 Duality Properties 1. D(D(x)) = x 2. D is one-to-one correspondence between all nonvertical lines and all points in the plane 3. Point p lies on line L iff point D(L) lies on line D(p) 4. Lines L 1 and L 2 intersect at point p iff the line D(p) passes through the two points D(L 1 ) and D(L 2 ) 5. If point p lies above line L, then line D(p) lies below point D(L); if p lies below L, then D(p) 20 lies above D(L)
21 Duality Properties 1. D(D(x)) = x 2. D is one-to-one correspondence between all nonvertical lines and all points in the plane 21
")
22 Duality Properties 3. Point p lies on line L iff point D(L) lies on line D(p) 22
23 Duality Properties 4. Lines L 1 and L 2 intersect at point p iff the line D(p) passes through the two points D(L 1 ) and D(L 2 ) 23
 lies below point D(L);")
24 Duality Properties 5. If point p lies above line L, then line D(p) lies below point D(L); if p lies below L, then D(p) lies above D(L) 24
25 Dual of a Triangle Applet 25
26 Dual of a Line Segment Applet D(q) D(r) q D(p) L p r D(L) 26

27 Applications of Duality Degeneracy testing Halfplane intersection/convex hull k-nearest Neighbors, higher order Voronoi diagrams Hidden surface removal Aspect graphs Smallest polytope shadow Ham sandwich cuts Red-blue matching Segment stabbing Radial sorting/visibility graphs Minimum area triangle 27
 of them are collinear Naïve: Check")
")
28 Degeneracy Testing Given n points in the plane: Decide if some 3 (or more) of them are collinear Naïve: Check all triples: O(n 3 ) Smarter: Sort points by angle around each point p i : n sorts, total O(n 2 log n) Applet 28
29 Degeneracy Testing Given n points in the plane: Decide if some 3 (or more) of them are collinear Use duality: Build arrangement of the n lines, D(p i ), in time O(n 2 ), and check if there is some vertex having degree 6 or more (where 3 or more lines pass through such is dual to a line passing through 3 or more points) Total time: O(n 2 ) O(n 2 ) space, but O(n) possible with topological sweep 29

30 Halfplane Intersection/Convex Hull Given n halfplanes, compute their intersection View in dual: lower envelope of n lines corresponds to upper convex hull of n points that are duals of the lines Applet 30
31 Segment Stabbing Given n line segments in the plane Decide if there exists a line L that stabs all of them (or find a line L that stabs as manhy as possible) View in dual: n double wedges (duals of segments) overlay to give an arr of 2n lines (build in O(n 2 )). Look for a point that lies in as many double wedges as possible (BFS/DFS in faces of arr) 31
32 Ham Sandwich Cut Bisector of a set S of points: A line L that has at most S /2 points strictly on each side of L Ham Sandwich Theorem: Given a set S=A B of red points (A) and blue points (B), there exists a line L that bisects both A and B 32
33 Ham Sandwich Cut L 33
34 Ham Sandwich Cut: Example 34
35 Ham Sandwich Cut: Example 35
36 Ham Sandwich Cut: Example 36
37 Ham Sandwich Cut: Example 37
38 Ham Sandwich Cuts Application: Noncrossing red-blue matching Higher dimensions: 38
39 Ham Sandwich Cut 39
40 Higher Dimensions In d dimensions: Arrangement of n hyperplanes has overall complexity O(n d ) Zone of a plane: Zone Theorem: O(n d-1 ) Algorithm to construct arr: O(n d ) Point-hyperplane duality 40
Line Arrangement. Chapter 6
 Line Arrangement Chapter 6 Line Arrangement Problem: Given a set L of n lines in the plane, compute their arrangement which is a planar subdivision. Line Arrangements Problem: Given a set L of n lines
Line Arrangement Chapter 6 Line Arrangement Problem: Given a set L of n lines in the plane, compute their arrangement which is a planar subdivision. Line Arrangements Problem: Given a set L of n lines
10. Line Arrangements Lecture on Monday 2 nd November, 2009 by Michael Homann
 10. Line Arrangements Lecture on Monday 2 nd November, 2009 by Michael Homann During the course of this lecture we encountered several situations where it was convenient to assume
10. Line Arrangements Lecture on Monday 2 nd November, 2009 by Michael Homann During the course of this lecture we encountered several situations where it was convenient to assume
Computational Geometry Lecture Duality of Points and Lines
 Computational Geometry Lecture Duality of Points and Lines INSTITUTE FOR THEORETICAL INFORMATICS FACULTY OF INFORMATICS 11.1.2016 Duality Transforms We have seen duality for planar graphs and duality of
Computational Geometry Lecture Duality of Points and Lines INSTITUTE FOR THEORETICAL INFORMATICS FACULTY OF INFORMATICS 11.1.2016 Duality Transforms We have seen duality for planar graphs and duality of
Line Arrangements. Applications
 Computational Geometry Chapter 9 Line Arrangements 1 Line Arrangements Applications On the Agenda 2 1 Complexity of a Line Arrangement Given a set L of n lines in the plane, their arrangement A(L) is the
Computational Geometry Chapter 9 Line Arrangements 1 Line Arrangements Applications On the Agenda 2 1 Complexity of a Line Arrangement Given a set L of n lines in the plane, their arrangement A(L) is the
Chapter 8. Voronoi Diagrams. 8.1 Post Oce Problem
 Chapter 8 Voronoi Diagrams 8.1 Post Oce Problem Suppose there are n post oces p 1,... p n in a city. Someone who is located at a position q within the city would like to know which post oce is closest
Chapter 8 Voronoi Diagrams 8.1 Post Oce Problem Suppose there are n post oces p 1,... p n in a city. Someone who is located at a position q within the city would like to know which post oce is closest
Chapter 11. Line Arrangements
 Chapter 11 Line Arrangements During the course of this lecture we encountered several situations where it was convenient to assume that a point set is \in general position". In the plane general position
Chapter 11 Line Arrangements During the course of this lecture we encountered several situations where it was convenient to assume that a point set is \in general position". In the plane general position
AMS 345/CSE 355 Computational Geometry
 AMS 345/CSE 355 Computational Geometry Lecture: Polygons, Guarding Joe Mitchell Do You Like Puzzles? Come to the new Stony Brook Puzzle Society Meets: Friday 1:05-2:30 pm at CSE 2120 Organizer: Pramod
AMS 345/CSE 355 Computational Geometry Lecture: Polygons, Guarding Joe Mitchell Do You Like Puzzles? Come to the new Stony Brook Puzzle Society Meets: Friday 1:05-2:30 pm at CSE 2120 Organizer: Pramod
Voronoi diagrams Delaunay Triangulations. Pierre Alliez Inria
 Voronoi diagrams Delaunay Triangulations Pierre Alliez Inria Voronoi Diagram Voronoi Diagram Voronoi Diagram The collection of the non-empty Voronoi regions and their faces, together with their incidence
Voronoi diagrams Delaunay Triangulations Pierre Alliez Inria Voronoi Diagram Voronoi Diagram Voronoi Diagram The collection of the non-empty Voronoi regions and their faces, together with their incidence
CMPS 3130/6130 Computational Geometry Spring Voronoi Diagrams. Carola Wenk. Based on: Computational Geometry: Algorithms and Applications
 CMPS 3130/6130 Computational Geometry Spring 2015 Voronoi Diagrams Carola Wenk Based on: Computational Geometry: Algorithms and Applications 2/19/15 CMPS 3130/6130 Computational Geometry 1 Voronoi Diagram
CMPS 3130/6130 Computational Geometry Spring 2015 Voronoi Diagrams Carola Wenk Based on: Computational Geometry: Algorithms and Applications 2/19/15 CMPS 3130/6130 Computational Geometry 1 Voronoi Diagram
Voronoi diagram and Delaunay triangulation
 Voronoi diagram and Delaunay triangulation Ioannis Emiris & Vissarion Fisikopoulos Dept. of Informatics & Telecommunications, University of Athens Computational Geometry, spring 2015 Outline 1 Voronoi
Voronoi diagram and Delaunay triangulation Ioannis Emiris & Vissarion Fisikopoulos Dept. of Informatics & Telecommunications, University of Athens Computational Geometry, spring 2015 Outline 1 Voronoi
Advanced Algorithms Computational Geometry Prof. Karen Daniels. Fall, 2012
 UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 Voronoi Diagrams & Delaunay Triangulations O Rourke: Chapter 5 de Berg et al.: Chapters 7,
UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 Voronoi Diagrams & Delaunay Triangulations O Rourke: Chapter 5 de Berg et al.: Chapters 7,
CS 532: 3D Computer Vision 14 th Set of Notes
 1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
Voronoi Diagram. Xiao-Ming Fu
 Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
Orthogonal Ham-Sandwich Theorem in R 3
 Orthogonal Ham-Sandwich Theorem in R 3 Downloaded 11/24/17 to 37.44.201.8. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php Abstract The ham-sandwich theorem
Orthogonal Ham-Sandwich Theorem in R 3 Downloaded 11/24/17 to 37.44.201.8. Redistribution subject to SIAM license or copyright; see http://www.siam.org/journals/ojsa.php Abstract The ham-sandwich theorem
VORONOI DIAGRAM PETR FELKEL. FEL CTU PRAGUE Based on [Berg] and [Mount]
![VORONOI DIAGRAM PETR FELKEL. FEL CTU PRAGUE Based on [Berg] and [Mount]](/thumbs/88/116547690.jpg "VORONOI DIAGRAM PETR FELKEL. FEL CTU PRAGUE Based on [Berg] and [Mount]") VORONOI DIAGRAM PETR FELKEL FEL CTU PRAGUE felkel@fel.cvut.cz https://cw.felk.cvut.cz/doku.php/courses/a4m39vg/start Based on [Berg] and [Mount] Version from 9.11.2017 Talk overview Definition and examples
VORONOI DIAGRAM PETR FELKEL FEL CTU PRAGUE felkel@fel.cvut.cz https://cw.felk.cvut.cz/doku.php/courses/a4m39vg/start Based on [Berg] and [Mount] Version from 9.11.2017 Talk overview Definition and examples
2D Geometry. Pierre Alliez Inria Sophia Antipolis
 2D Geometry Pierre Alliez Inria Sophia Antipolis Outline Sample problems Polygons Graphs Convex hull Voronoi diagram Delaunay triangulation Sample Problems Line Segment Intersection Theorem: Segments (p
2D Geometry Pierre Alliez Inria Sophia Antipolis Outline Sample problems Polygons Graphs Convex hull Voronoi diagram Delaunay triangulation Sample Problems Line Segment Intersection Theorem: Segments (p
be a polytope. has such a representation iff it contains the origin in its interior. For a generic, sort the inequalities so that
 ( Shelling (Bruggesser-Mani 1971) and Ranking Let be a polytope. has such a representation iff it contains the origin in its interior. For a generic, sort the inequalities so that. a ranking of vertices
( Shelling (Bruggesser-Mani 1971) and Ranking Let be a polytope. has such a representation iff it contains the origin in its interior. For a generic, sort the inequalities so that. a ranking of vertices
COMP331/557. Chapter 2: The Geometry of Linear Programming. (Bertsimas & Tsitsiklis, Chapter 2)
") COMP331/557 Chapter 2: The Geometry of Linear Programming (Bertsimas & Tsitsiklis, Chapter 2) 49 Polyhedra and Polytopes Definition 2.1. Let A 2 R m n and b 2 R m. a set {x 2 R n A x b} is called polyhedron
COMP331/557 Chapter 2: The Geometry of Linear Programming (Bertsimas & Tsitsiklis, Chapter 2) 49 Polyhedra and Polytopes Definition 2.1. Let A 2 R m n and b 2 R m. a set {x 2 R n A x b} is called polyhedron
Week 8 Voronoi Diagrams
 1 Week 8 Voronoi Diagrams 2 Voronoi Diagram Very important problem in Comp. Geo. Discussed back in 1850 by Dirichlet Published in a paper by Voronoi in 1908 3 Voronoi Diagram Fire observation towers: an
1 Week 8 Voronoi Diagrams 2 Voronoi Diagram Very important problem in Comp. Geo. Discussed back in 1850 by Dirichlet Published in a paper by Voronoi in 1908 3 Voronoi Diagram Fire observation towers: an
Lifting Transform, Voronoi, Delaunay, Convex Hulls
 Lifting Transform, Voronoi, Delaunay, Convex Hulls Subhash Suri Department of Computer Science University of California Santa Barbara, CA 93106 1 Lifting Transform (A combination of Pless notes and my
Lifting Transform, Voronoi, Delaunay, Convex Hulls Subhash Suri Department of Computer Science University of California Santa Barbara, CA 93106 1 Lifting Transform (A combination of Pless notes and my
Voronoi Diagrams and Delaunay Triangulation slides by Andy Mirzaian (a subset of the original slides are used here)
") Voronoi Diagrams and Delaunay Triangulation slides by Andy Mirzaian (a subset of the original slides are used here) Voronoi Diagram & Delaunay Triangualtion Algorithms Divide-&-Conquer Plane Sweep Lifting
Voronoi Diagrams and Delaunay Triangulation slides by Andy Mirzaian (a subset of the original slides are used here) Voronoi Diagram & Delaunay Triangualtion Algorithms Divide-&-Conquer Plane Sweep Lifting
Planar Graphs. 1 Graphs and maps. 1.1 Planarity and duality
 Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Art Gallery, Triangulation, and Voronoi Regions
 Art Gallery, Triangulation, and Voronoi Regions CS535 Fall 2016 Daniel G. Aliaga Department of Computer Science Purdue University [some slides based on Profs. Shmuel Wimer and Andy Mirzaian Topics Triangulation
Art Gallery, Triangulation, and Voronoi Regions CS535 Fall 2016 Daniel G. Aliaga Department of Computer Science Purdue University [some slides based on Profs. Shmuel Wimer and Andy Mirzaian Topics Triangulation
Chapter 9. Line Arrangements
 Chapter 9 Line Arrangements During the course of this lecture we encountered several situations where it was convenient to assume that a point set is in general position. In the plane, general position
Chapter 9 Line Arrangements During the course of this lecture we encountered several situations where it was convenient to assume that a point set is in general position. In the plane, general position
Lecture 16: Voronoi Diagrams and Fortune s Algorithm
 contains q changes as a result of the ith insertion. Let P i denote this probability (where the probability is taken over random insertion orders, irrespective of the choice of q). Since q could fall through
contains q changes as a result of the ith insertion. Let P i denote this probability (where the probability is taken over random insertion orders, irrespective of the choice of q). Since q could fall through
Stabbers of line segments in the plane
 Stabbers of line segments in the plane M. Claverol D. Garijo C. I. Grima A. Márquez C. Seara August 3, 2010 Abstract The problem of computing a representation of the stabbing lines of a set S of segments
Stabbers of line segments in the plane M. Claverol D. Garijo C. I. Grima A. Márquez C. Seara August 3, 2010 Abstract The problem of computing a representation of the stabbing lines of a set S of segments
In what follows, we will focus on Voronoi diagrams in Euclidean space. Later, we will generalize to other distance spaces.
 Voronoi Diagrams 4 A city builds a set of post offices, and now needs to determine which houses will be served by which office. It would be wasteful for a postman to go out of their way to make a delivery
Voronoi Diagrams 4 A city builds a set of post offices, and now needs to determine which houses will be served by which office. It would be wasteful for a postman to go out of their way to make a delivery
Lecture 1 Discrete Geometric Structures
 Lecture 1 Discrete Geometric Structures Jean-Daniel Boissonnat Winter School on Computational Geometry and Topology University of Nice Sophia Antipolis January 23-27, 2017 Computational Geometry and Topology
Lecture 1 Discrete Geometric Structures Jean-Daniel Boissonnat Winter School on Computational Geometry and Topology University of Nice Sophia Antipolis January 23-27, 2017 Computational Geometry and Topology
Planar graphs. Math Prof. Kindred - Lecture 16 Page 1
 Planar graphs Typically a drawing of a graph is simply a notational shorthand or a more visual way to capture the structure of the graph. Now we focus on the drawings themselves. Definition A drawing of
Planar graphs Typically a drawing of a graph is simply a notational shorthand or a more visual way to capture the structure of the graph. Now we focus on the drawings themselves. Definition A drawing of
Lecture 3 Randomized Algorithms
 Lecture 3 Randomized Algorithms Jean-Daniel Boissonnat Winter School on Computational Geometry and Topology University of Nice Sophia Antipolis January 23-27, 2017 Computational Geometry and Topology Randomized
Lecture 3 Randomized Algorithms Jean-Daniel Boissonnat Winter School on Computational Geometry and Topology University of Nice Sophia Antipolis January 23-27, 2017 Computational Geometry and Topology Randomized
Computational Geometry 2D Convex Hulls
 Computational Geometry 2D Convex Hulls Joseph S. B. Mitchell Stony Brook University Chapter 2: Devadoss-O Rourke Convexity p p Set X is convex if p,q X pq X q q convex non-convex Point p X is an extreme
Computational Geometry 2D Convex Hulls Joseph S. B. Mitchell Stony Brook University Chapter 2: Devadoss-O Rourke Convexity p p Set X is convex if p,q X pq X q q convex non-convex Point p X is an extreme
3. Voronoi Diagrams. 3.1 Definitions & Basic Properties. Examples :
 3. Voronoi Diagrams Examples : 1. Fire Observation Towers Imagine a vast forest containing a number of fire observation towers. Each ranger is responsible for extinguishing any fire closer to her tower
3. Voronoi Diagrams Examples : 1. Fire Observation Towers Imagine a vast forest containing a number of fire observation towers. Each ranger is responsible for extinguishing any fire closer to her tower
CS133 Computational Geometry
 CS133 Computational Geometry Voronoi Diagram Delaunay Triangulation 5/17/2018 1 Nearest Neighbor Problem Given a set of points P and a query point q, find the closest point p P to q p, r P, dist p, q dist(r,
CS133 Computational Geometry Voronoi Diagram Delaunay Triangulation 5/17/2018 1 Nearest Neighbor Problem Given a set of points P and a query point q, find the closest point p P to q p, r P, dist p, q dist(r,
Simplicial Cells in Arrangements of Hyperplanes
 Simplicial Cells in Arrangements of Hyperplanes Christoph Dätwyler 05.01.2013 This paper is a report written due to the authors presentation of a paper written by Shannon [1] in 1977. The presentation
Simplicial Cells in Arrangements of Hyperplanes Christoph Dätwyler 05.01.2013 This paper is a report written due to the authors presentation of a paper written by Shannon [1] in 1977. The presentation
Pebble Sets in Convex Polygons
 2 1 Pebble Sets in Convex Polygons Kevin Iga, Randall Maddox June 15, 2005 Abstract Lukács and András posed the problem of showing the existence of a set of n 2 points in the interior of a convex n-gon
2 1 Pebble Sets in Convex Polygons Kevin Iga, Randall Maddox June 15, 2005 Abstract Lukács and András posed the problem of showing the existence of a set of n 2 points in the interior of a convex n-gon
2 Geometry Solutions
 2 Geometry Solutions jacques@ucsd.edu Here is give problems and solutions in increasing order of difficulty. 2.1 Easier problems Problem 1. What is the minimum number of hyperplanar slices to make a d-dimensional
2 Geometry Solutions jacques@ucsd.edu Here is give problems and solutions in increasing order of difficulty. 2.1 Easier problems Problem 1. What is the minimum number of hyperplanar slices to make a d-dimensional
BMO Round 1 Problem 6 Solutions
 BMO 2005 2006 Round 1 Problem 6 Solutions Joseph Myers November 2005 Introduction Problem 6 is: 6. Let T be a set of 2005 coplanar points with no three collinear. Show that, for any of the 2005 points,
BMO 2005 2006 Round 1 Problem 6 Solutions Joseph Myers November 2005 Introduction Problem 6 is: 6. Let T be a set of 2005 coplanar points with no three collinear. Show that, for any of the 2005 points,
The Farthest Point Delaunay Triangulation Minimizes Angles
 The Farthest Point Delaunay Triangulation Minimizes Angles David Eppstein Department of Information and Computer Science UC Irvine, CA 92717 November 20, 1990 Abstract We show that the planar dual to the
The Farthest Point Delaunay Triangulation Minimizes Angles David Eppstein Department of Information and Computer Science UC Irvine, CA 92717 November 20, 1990 Abstract We show that the planar dual to the
HW Graph Theory SOLUTIONS (hbovik) - Q
 - Q") 1, Diestel 9.3: An arithmetic progression is an increasing sequence of numbers of the form a, a+d, a+ d, a + 3d.... Van der Waerden s theorem says that no matter how we partition the natural numbers into
1, Diestel 9.3: An arithmetic progression is an increasing sequence of numbers of the form a, a+d, a+ d, a + 3d.... Van der Waerden s theorem says that no matter how we partition the natural numbers into
Voronoi Diagrams. A Voronoi diagram records everything one would ever want to know about proximity to a set of points
 Voronoi Diagrams Voronoi Diagrams A Voronoi diagram records everything one would ever want to know about proximity to a set of points Who is closest to whom? Who is furthest? We will start with a series
Voronoi Diagrams Voronoi Diagrams A Voronoi diagram records everything one would ever want to know about proximity to a set of points Who is closest to whom? Who is furthest? We will start with a series
Computational Geometry Exercise Duality
 Computational Geometry Exercise Duality LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Guido Brückner 20.07.2018 1 Duality Transforms We have seen duality for
Computational Geometry Exercise Duality LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Guido Brückner 20.07.2018 1 Duality Transforms We have seen duality for
CS S Lecture February 13, 2017
 CS 6301.008.18S Lecture February 13, 2017 Main topics are #Voronoi-diagrams, #Fortune. Quick Note about Planar Point Location Last week, I started giving a difficult analysis of the planar point location
CS 6301.008.18S Lecture February 13, 2017 Main topics are #Voronoi-diagrams, #Fortune. Quick Note about Planar Point Location Last week, I started giving a difficult analysis of the planar point location
Computational Geometry
 Motivation Motivation Polygons and visibility Visibility in polygons Triangulation Proof of the Art gallery theorem Two points in a simple polygon can see each other if their connecting line segment is
Motivation Motivation Polygons and visibility Visibility in polygons Triangulation Proof of the Art gallery theorem Two points in a simple polygon can see each other if their connecting line segment is
Computational Geometry
 Computational Geometry Range queries Convex hulls Lower bounds Planar subdivision search Line segment intersection Convex polygons Voronoi diagrams Minimum spanning trees Nearest neighbors Triangulations
Computational Geometry Range queries Convex hulls Lower bounds Planar subdivision search Line segment intersection Convex polygons Voronoi diagrams Minimum spanning trees Nearest neighbors Triangulations
Course 16 Geometric Data Structures for Computer Graphics. Voronoi Diagrams
 Course 16 Geometric Data Structures for Computer Graphics Voronoi Diagrams Dr. Elmar Langetepe Institut für Informatik I Universität Bonn Geometric Data Structures for CG July 27 th Voronoi Diagrams San
Course 16 Geometric Data Structures for Computer Graphics Voronoi Diagrams Dr. Elmar Langetepe Institut für Informatik I Universität Bonn Geometric Data Structures for CG July 27 th Voronoi Diagrams San
Computational Geometry Overview from Cormen, et al.
 UMass Lowell Computer Science 91.503 Graduate Algorithms Prof. Karen Daniels Spring, 2014 Computational Geometry Overview from Cormen, et al. Chapter 33 (with additional material from other sources) 1
UMass Lowell Computer Science 91.503 Graduate Algorithms Prof. Karen Daniels Spring, 2014 Computational Geometry Overview from Cormen, et al. Chapter 33 (with additional material from other sources) 1
Voronoi Diagrams and Delaunay Triangulations. O Rourke, Chapter 5
 Voronoi Diagrams and Delaunay Triangulations O Rourke, Chapter 5 Outline Preliminaries Properties and Applications Computing the Delaunay Triangulation Preliminaries Given a function f: R 2 R, the tangent
Voronoi Diagrams and Delaunay Triangulations O Rourke, Chapter 5 Outline Preliminaries Properties and Applications Computing the Delaunay Triangulation Preliminaries Given a function f: R 2 R, the tangent
For a set S of line segments, a separator can be found using duality. Under duality, the segments transform to double wedges, and a separator line tra
 Separating and Shattering Long Line Segments? Alon Efrat School of Mathematical Sciences, Tel Aviv University, Tel-Aviv 69982, Israel. Email: alone@cs.tau.ac.il Otfried Schwarzkopf Dept of Computer Science,
Separating and Shattering Long Line Segments? Alon Efrat School of Mathematical Sciences, Tel Aviv University, Tel-Aviv 69982, Israel. Email: alone@cs.tau.ac.il Otfried Schwarzkopf Dept of Computer Science,
6.854J / J Advanced Algorithms Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 6.854J / 18.415J Advanced Algorithms Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 18.415/6.854 Advanced
MIT OpenCourseWare http://ocw.mit.edu 6.854J / 18.415J Advanced Algorithms Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 18.415/6.854 Advanced
Computational Geometry 2D Convex Hulls. Joseph S. B. Mitchell Stony Brook University
 Computational Geometry 2D Convex Hulls Joseph S. B. Mitchell Stony Brook University Comparing O(n), O(n log n), O(n 2 ) n n log n n² 2 10 10³ 10 2 10 10 4 2 20 10 6 2 20 10 6 20 2 20 2 10 7 2 40 10 12
Computational Geometry 2D Convex Hulls Joseph S. B. Mitchell Stony Brook University Comparing O(n), O(n log n), O(n 2 ) n n log n n² 2 10 10³ 10 2 10 10 4 2 20 10 6 2 20 10 6 20 2 20 2 10 7 2 40 10 12
Polygon Triangulation
 Polygon Triangulation Definition Simple Polygons 1. A polygon is the region of a plane bounded by a finite collection of line segments forming a simple closed curve. 2. Simple closed curve means a certain
Polygon Triangulation Definition Simple Polygons 1. A polygon is the region of a plane bounded by a finite collection of line segments forming a simple closed curve. 2. Simple closed curve means a certain
The Visibility Problem and Binary Space Partition. (slides by Nati Srebro)
") The Visibility Problem and Binary Space Partition (slides by Nati Srebro) The Visibility Problem b a c d e Algorithms Z-buffer: Draw objects in arbitrary order For each pixel, maintain distance to the
The Visibility Problem and Binary Space Partition (slides by Nati Srebro) The Visibility Problem b a c d e Algorithms Z-buffer: Draw objects in arbitrary order For each pixel, maintain distance to the
Computational Geometry. Geometry Cross Product Convex Hull Problem Sweep Line Algorithm
 GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
Partitioning Orthogonal Polygons by Extension of All Edges Incident to Reflex Vertices: lower and upper bounds on the number of pieces
 Partitioning Orthogonal Polygons by Extension of All Edges Incident to Reflex Vertices: lower and upper bounds on the number of pieces António Leslie Bajuelos 1, Ana Paula Tomás and Fábio Marques 3 1 Dept.
Partitioning Orthogonal Polygons by Extension of All Edges Incident to Reflex Vertices: lower and upper bounds on the number of pieces António Leslie Bajuelos 1, Ana Paula Tomás and Fábio Marques 3 1 Dept.
8 Colouring Planar Graphs
 8 Colouring Planar Graphs The Four Colour Theorem Lemma 8.1 If G is a simple planar graph, then (i) 12 v V (G)(6 deg(v)) with equality for triangulations. (ii) G has a vertex of degree 5. Proof: For (i),
8 Colouring Planar Graphs The Four Colour Theorem Lemma 8.1 If G is a simple planar graph, then (i) 12 v V (G)(6 deg(v)) with equality for triangulations. (ii) G has a vertex of degree 5. Proof: For (i),
Voronoi Diagrams in the Plane. Chapter 5 of O Rourke text Chapter 7 and 9 of course text
 Voronoi Diagrams in the Plane Chapter 5 of O Rourke text Chapter 7 and 9 of course text Voronoi Diagrams As important as convex hulls Captures the neighborhood (proximity) information of geometric objects
Voronoi Diagrams in the Plane Chapter 5 of O Rourke text Chapter 7 and 9 of course text Voronoi Diagrams As important as convex hulls Captures the neighborhood (proximity) information of geometric objects
Field: We have been doing geometry eg linear programming. But in computational geometry, key difference in focus: low dimension d
 1 Geometry Field: We have been doing geometry eg linear programming But in computational geometry, key difference in focus: low dimension d Lots of algorithms that are great for d small, but exponential
1 Geometry Field: We have been doing geometry eg linear programming But in computational geometry, key difference in focus: low dimension d Lots of algorithms that are great for d small, but exponential
Math 414 Lecture 2 Everyone have a laptop?
 Math 44 Lecture 2 Everyone have a laptop? THEOREM. Let v,...,v k be k vectors in an n-dimensional space and A = [v ;...; v k ] v,..., v k independent v,..., v k span the space v,..., v k a basis v,...,
Math 44 Lecture 2 Everyone have a laptop? THEOREM. Let v,...,v k be k vectors in an n-dimensional space and A = [v ;...; v k ] v,..., v k independent v,..., v k span the space v,..., v k a basis v,...,
G 6i try. On the Number of Minimal 1-Steiner Trees* Discrete Comput Geom 12:29-34 (1994)
") Discrete Comput Geom 12:29-34 (1994) G 6i try 9 1994 Springer-Verlag New York Inc. On the Number of Minimal 1-Steiner Trees* B. Aronov, 1 M. Bern, 2 and D. Eppstein 3 Computer Science Department, Polytechnic
Discrete Comput Geom 12:29-34 (1994) G 6i try 9 1994 Springer-Verlag New York Inc. On the Number of Minimal 1-Steiner Trees* B. Aronov, 1 M. Bern, 2 and D. Eppstein 3 Computer Science Department, Polytechnic
CAD & Computational Geometry Course plan
 Course plan Introduction Segment-Segment intersections Polygon Triangulation Intro to Voronoï Diagrams & Geometric Search Sweeping algorithm for Voronoï Diagrams 1 Voronoi Diagrams Voronoi Diagrams or
Course plan Introduction Segment-Segment intersections Polygon Triangulation Intro to Voronoï Diagrams & Geometric Search Sweeping algorithm for Voronoï Diagrams 1 Voronoi Diagrams Voronoi Diagrams or
Other Voronoi/Delaunay Structures
 Other Voronoi/Delaunay Structures Overview Alpha hulls (a subset of Delaunay graph) Extension of Voronoi Diagrams Convex Hull What is it good for? The bounding region of a point set Not so good for describing
Other Voronoi/Delaunay Structures Overview Alpha hulls (a subset of Delaunay graph) Extension of Voronoi Diagrams Convex Hull What is it good for? The bounding region of a point set Not so good for describing
Week 7 Convex Hulls in 3D
 1 Week 7 Convex Hulls in 3D 2 Polyhedra A polyhedron is the natural generalization of a 2D polygon to 3D 3 Closed Polyhedral Surface A closed polyhedral surface is a finite set of interior disjoint polygons
1 Week 7 Convex Hulls in 3D 2 Polyhedra A polyhedron is the natural generalization of a 2D polygon to 3D 3 Closed Polyhedral Surface A closed polyhedral surface is a finite set of interior disjoint polygons
Crossing Families. Abstract
 Crossing Families Boris Aronov 1, Paul Erdős 2, Wayne Goddard 3, Daniel J. Kleitman 3, Michael Klugerman 3, János Pach 2,4, Leonard J. Schulman 3 Abstract Given a set of points in the plane, a crossing
Crossing Families Boris Aronov 1, Paul Erdős 2, Wayne Goddard 3, Daniel J. Kleitman 3, Michael Klugerman 3, János Pach 2,4, Leonard J. Schulman 3 Abstract Given a set of points in the plane, a crossing
On the number of distinct directions of planes determined by n points in R 3
 On the number of distinct directions of planes determined by n points in R 3 Rom Pinchasi August 27, 2007 Abstract We show that any set of n points in R 3, that is not contained in a plane, determines
On the number of distinct directions of planes determined by n points in R 3 Rom Pinchasi August 27, 2007 Abstract We show that any set of n points in R 3, that is not contained in a plane, determines
Binary Space Partitions for Orthogonal Segments and Hyperrectangles Adrian Dumitrescu Joe Mitchell Micha Sharir
 Binary Space Partitions for Orthogonal Segments and Hyperrectangles Adrian Dumitrescu Joe Mitchell Micha Sharir State University of New York Stony Brook, NY 11794 3600 Binary Space Partitions (BSP): l5
Binary Space Partitions for Orthogonal Segments and Hyperrectangles Adrian Dumitrescu Joe Mitchell Micha Sharir State University of New York Stony Brook, NY 11794 3600 Binary Space Partitions (BSP): l5
Computational Geometry: Lecture 5
 Computational Geometry: Lecture 5 Don Sheehy January 29, 2010 1 Degeneracy In many of the algorithms that we have discussed so far, we have run into problems when that input is somehow troublesome. For
Computational Geometry: Lecture 5 Don Sheehy January 29, 2010 1 Degeneracy In many of the algorithms that we have discussed so far, we have run into problems when that input is somehow troublesome. For
High-Dimensional Computational Geometry. Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018
 High-Dimensional Computational Geometry Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018 Outline 3-D vector geometry High-D hyperplane intersections Convex hull & its extension to 3
High-Dimensional Computational Geometry Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018 Outline 3-D vector geometry High-D hyperplane intersections Convex hull & its extension to 3
Computational Geometry. Algorithm Design (10) Computational Geometry. Convex Hull. Areas in Computational Geometry
 Computational Geometry. Convex Hull. Areas in Computational Geometry") Computational Geometry Algorithm Design (10) Computational Geometry Graduate School of Engineering Takashi Chikayama Algorithms formulated as geometry problems Broad application areas Computer Graphics,
Computational Geometry Algorithm Design (10) Computational Geometry Graduate School of Engineering Takashi Chikayama Algorithms formulated as geometry problems Broad application areas Computer Graphics,
Planar Point Location
 C.S. 252 Prof. Roberto Tamassia Computational Geometry Sem. II, 1992 1993 Lecture 04 Date: February 15, 1993 Scribe: John Bazik Planar Point Location 1 Introduction In range searching, a set of values,
C.S. 252 Prof. Roberto Tamassia Computational Geometry Sem. II, 1992 1993 Lecture 04 Date: February 15, 1993 Scribe: John Bazik Planar Point Location 1 Introduction In range searching, a set of values,
Basic Combinatorics. Math 40210, Section 01 Fall Homework 4 Solutions
 Basic Combinatorics Math 40210, Section 01 Fall 2012 Homework 4 Solutions 1.4.2 2: One possible implementation: Start with abcgfjiea From edge cd build, using previously unmarked edges: cdhlponminjkghc
Basic Combinatorics Math 40210, Section 01 Fall 2012 Homework 4 Solutions 1.4.2 2: One possible implementation: Start with abcgfjiea From edge cd build, using previously unmarked edges: cdhlponminjkghc
Voronoi Diagrams, Delaunay Triangulations and Polytopes
 Voronoi Diagrams, Delaunay Triangulations and Polytopes Jean-Daniel Boissonnat MPRI, Lecture 2 Computational Geometry Learning Voronoi, Delaunay & Polytopes MPRI, Lecture 2 1 / 43 Voronoi diagrams in nature
Voronoi Diagrams, Delaunay Triangulations and Polytopes Jean-Daniel Boissonnat MPRI, Lecture 2 Computational Geometry Learning Voronoi, Delaunay & Polytopes MPRI, Lecture 2 1 / 43 Voronoi diagrams in nature
Geometric Computation: Introduction
 : Introduction Piotr Indyk Welcome to 6.838! Overview and goals Course Information Syllabus 2D Convex hull Signup sheet Geometric computation occurs everywhere: Geographic Information Systems (GIS): nearest
: Introduction Piotr Indyk Welcome to 6.838! Overview and goals Course Information Syllabus 2D Convex hull Signup sheet Geometric computation occurs everywhere: Geographic Information Systems (GIS): nearest
Lectures 19: The Gauss-Bonnet Theorem I. Table of contents
 Math 348 Fall 07 Lectures 9: The Gauss-Bonnet Theorem I Disclaimer. As we have a textbook, this lecture note is for guidance and supplement only. It should not be relied on when preparing for exams. In
Math 348 Fall 07 Lectures 9: The Gauss-Bonnet Theorem I Disclaimer. As we have a textbook, this lecture note is for guidance and supplement only. It should not be relied on when preparing for exams. In
Line segment intersection. Family of intersection problems
 CG Lecture 2 Line segment intersection Intersecting two line segments Line sweep algorithm Convex polygon intersection Boolean operations on polygons Subdivision overlay algorithm 1 Family of intersection
CG Lecture 2 Line segment intersection Intersecting two line segments Line sweep algorithm Convex polygon intersection Boolean operations on polygons Subdivision overlay algorithm 1 Family of intersection
Fortune s Algorithm. Notes from the book by de Berg, Van Krevald, Overmars, and Schwarzkpf
 Notes from the book by de Berg, Van Krevald, Overmars, and Schwarzkpf Based on sweeping the plane with a horizontal line and computing the Voronoi diagram as the line sweeps Straight forward approach won
Notes from the book by de Berg, Van Krevald, Overmars, and Schwarzkpf Based on sweeping the plane with a horizontal line and computing the Voronoi diagram as the line sweeps Straight forward approach won
Planar graphs. Chapter 8
 Chapter 8 Planar graphs Definition 8.1. A graph is called planar if it can be drawn in the plane so that edges intersect only at vertices to which they are incident. Example 8.2. Different representations
Chapter 8 Planar graphs Definition 8.1. A graph is called planar if it can be drawn in the plane so that edges intersect only at vertices to which they are incident. Example 8.2. Different representations
Partitions and Packings of Complete Geometric Graphs with Plane Spanning Double Stars and Paths
 Partitions and Packings of Complete Geometric Graphs with Plane Spanning Double Stars and Paths Master Thesis Patrick Schnider July 25, 2015 Advisors: Prof. Dr. Emo Welzl, Manuel Wettstein Department of
Partitions and Packings of Complete Geometric Graphs with Plane Spanning Double Stars and Paths Master Thesis Patrick Schnider July 25, 2015 Advisors: Prof. Dr. Emo Welzl, Manuel Wettstein Department of
1 The range query problem
 CS268: Geometric Algorithms Handout #12 Design and Analysis Original Handout #12 Stanford University Thursday, 19 May 1994 Original Lecture #12: Thursday, May 19, 1994 Topics: Range Searching with Partition
CS268: Geometric Algorithms Handout #12 Design and Analysis Original Handout #12 Stanford University Thursday, 19 May 1994 Original Lecture #12: Thursday, May 19, 1994 Topics: Range Searching with Partition
Connected Components of Underlying Graphs of Halving Lines
 arxiv:1304.5658v1 [math.co] 20 Apr 2013 Connected Components of Underlying Graphs of Halving Lines Tanya Khovanova MIT November 5, 2018 Abstract Dai Yang MIT In this paper we discuss the connected components
arxiv:1304.5658v1 [math.co] 20 Apr 2013 Connected Components of Underlying Graphs of Halving Lines Tanya Khovanova MIT November 5, 2018 Abstract Dai Yang MIT In this paper we discuss the connected components
Lecture 3: Art Gallery Problems and Polygon Triangulation
 EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College
![3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College](/thumbs/75/72944672.jpg "3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College") 3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hull in 3D The problem: Given a set P of points in 3D, compute their convex hull convex polyhedron 2D 3D polygon
3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hull in 3D The problem: Given a set P of points in 3D, compute their convex hull convex polyhedron 2D 3D polygon
MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces
 MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces David L. Finn Today, we continue our discussion of subdivision surfaces, by first looking in more detail at the midpoint method and
MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces David L. Finn Today, we continue our discussion of subdivision surfaces, by first looking in more detail at the midpoint method and
Polygon Triangulation. (slides partially by Daniel Vlasic )
") Polygon Triangulation (slides partially by Daniel Vlasic ) Triangulation: Definition Triangulation of a simple polygon P: decomposition of P into triangles by a maximal set of non-intersecting diagonals
Polygon Triangulation (slides partially by Daniel Vlasic ) Triangulation: Definition Triangulation of a simple polygon P: decomposition of P into triangles by a maximal set of non-intersecting diagonals
Ma/CS 6b Class 11: Kuratowski and Coloring
 Ma/CS 6b Class 11: Kuratowski and Coloring By Adam Sheffer Kuratowski's Theorem Theorem. A graph is planar if and only if it does not have K 5 and K 3,3 as topological minors. We know that if a graph contains
Ma/CS 6b Class 11: Kuratowski and Coloring By Adam Sheffer Kuratowski's Theorem Theorem. A graph is planar if and only if it does not have K 5 and K 3,3 as topological minors. We know that if a graph contains
Jordan Curves. A curve is a subset of IR 2 of the form
 Jordan Curves A curve is a subset of IR 2 of the form α = {γ(x) : x [0, 1]}, where γ : [0, 1] IR 2 is a continuous mapping from the closed interval [0, 1] to the plane. γ(0) and γ(1) are called the endpoints
Jordan Curves A curve is a subset of IR 2 of the form α = {γ(x) : x [0, 1]}, where γ : [0, 1] IR 2 is a continuous mapping from the closed interval [0, 1] to the plane. γ(0) and γ(1) are called the endpoints
HW Graph Theory Name (andrewid) - X. 1: Draw K 7 on a torus with no edge crossings.
 - X. 1: Draw K 7 on a torus with no edge crossings.") 1: Draw K 7 on a torus with no edge crossings. A quick calculation reveals that an embedding of K 7 on the torus is a -cell embedding. At that point, it is hard to go wrong if you start drawing C 3 faces,
1: Draw K 7 on a torus with no edge crossings. A quick calculation reveals that an embedding of K 7 on the torus is a -cell embedding. At that point, it is hard to go wrong if you start drawing C 3 faces,
COMPUTATIONAL GEOMETRY
 Thursday, September 20, 2007 (Ming C. Lin) Review on Computational Geometry & Collision Detection for Convex Polytopes COMPUTATIONAL GEOMETRY (Refer to O'Rourke's and Dutch textbook ) 1. Extreme Points
Thursday, September 20, 2007 (Ming C. Lin) Review on Computational Geometry & Collision Detection for Convex Polytopes COMPUTATIONAL GEOMETRY (Refer to O'Rourke's and Dutch textbook ) 1. Extreme Points
PACKING DIGRAPHS WITH DIRECTED CLOSED TRAILS
 PACKING DIGRAPHS WITH DIRECTED CLOSED TRAILS PAUL BALISTER Abstract It has been shown [Balister, 2001] that if n is odd and m 1,, m t are integers with m i 3 and t i=1 m i = E(K n) then K n can be decomposed
PACKING DIGRAPHS WITH DIRECTED CLOSED TRAILS PAUL BALISTER Abstract It has been shown [Balister, 2001] that if n is odd and m 1,, m t are integers with m i 3 and t i=1 m i = E(K n) then K n can be decomposed
2 Delaunay Triangulations
 and the closed half-space H(b, a) containingb and with boundary the bisector hyperplane is the locus of all points such that (b 1 a 1 )x 1 + +(b m a m )x m (b 2 1 + + b 2 m)/2 (a 2 1 + + a 2 m)/2. The
and the closed half-space H(b, a) containingb and with boundary the bisector hyperplane is the locus of all points such that (b 1 a 1 )x 1 + +(b m a m )x m (b 2 1 + + b 2 m)/2 (a 2 1 + + a 2 m)/2. The
Generalizing Ham Sandwich Cuts to Equitable Subdivisions
 Discrete Comput Geom 24:605 622 (2000) DOI: 10.1007/s004540010065 Discrete & Computational Geometry 2000 Springer-Verlag New York Inc. Generalizing Ham Sandwich Cuts to Equitable Subdivisions S. Bespamyatnikh,
Discrete Comput Geom 24:605 622 (2000) DOI: 10.1007/s004540010065 Discrete & Computational Geometry 2000 Springer-Verlag New York Inc. Generalizing Ham Sandwich Cuts to Equitable Subdivisions S. Bespamyatnikh,
Tangencies between disjoint regions in the plane
 June 16, 20 Problem Definition Two nonoverlapping Jordan regions in the plane are said to touch each other or to be tangent to each other if their boundaries have precisely one point in common and their
June 16, 20 Problem Definition Two nonoverlapping Jordan regions in the plane are said to touch each other or to be tangent to each other if their boundaries have precisely one point in common and their
Scheduling, Map Coloring, and Graph Coloring
 Scheduling, Map Coloring, and Graph Coloring Scheduling via Graph Coloring: Final Exam Example Suppose want to schedule some ;inal exams for CS courses with following course numbers: 1007, 3137, 3157,
Scheduling, Map Coloring, and Graph Coloring Scheduling via Graph Coloring: Final Exam Example Suppose want to schedule some ;inal exams for CS courses with following course numbers: 1007, 3137, 3157,
Search and Intersection. O Rourke, Chapter 7 de Berg et al., Chapter 11
 Search and Intersection O Rourke, Chapter 7 de Berg et al., Chapter 11 Announcements Assignment 3 web-page has been updated: Additional extra credit Hints for managing a dynamic half-edge representation
Search and Intersection O Rourke, Chapter 7 de Berg et al., Chapter 11 Announcements Assignment 3 web-page has been updated: Additional extra credit Hints for managing a dynamic half-edge representation
Robust Statistics and Arrangements David Eppstein
 Robust Statistics and Arrangements David Eppstein Univ. of California, Irvine School of Information and Computer Science Two Worlds Robust Statistics Fit data points to model of data generation + errors
Robust Statistics and Arrangements David Eppstein Univ. of California, Irvine School of Information and Computer Science Two Worlds Robust Statistics Fit data points to model of data generation + errors
Approximate Nearest Neighbor Problem: Improving Query Time CS468, 10/9/2006
 Approximate Nearest Neighbor Problem: Improving Query Time CS468, 10/9/2006 Outline Reducing the constant from O ( ɛ d) to O ( ɛ (d 1)/2) in uery time Need to know ɛ ahead of time Preprocessing time and
Approximate Nearest Neighbor Problem: Improving Query Time CS468, 10/9/2006 Outline Reducing the constant from O ( ɛ d) to O ( ɛ (d 1)/2) in uery time Need to know ɛ ahead of time Preprocessing time and
Synthetic Geometry. 1.1 Foundations 1.2 The axioms of projective geometry
 Synthetic Geometry 1.1 Foundations 1.2 The axioms of projective geometry Foundations Def: A geometry is a pair G = (Ω, I), where Ω is a set and I a relation on Ω that is symmetric and reflexive, i.e. 1.
Synthetic Geometry 1.1 Foundations 1.2 The axioms of projective geometry Foundations Def: A geometry is a pair G = (Ω, I), where Ω is a set and I a relation on Ω that is symmetric and reflexive, i.e. 1.
Flavor of Computational Geometry. Voronoi Diagrams. Shireen Y. Elhabian Aly A. Farag University of Louisville
 Flavor of Computational Geometry Voronoi Diagrams Shireen Y. Elhabian Aly A. Farag University of Louisville March 2010 Pepperoni Sparse Pizzas Olive Sparse Pizzas Just Two Pepperonis A person gets the
Flavor of Computational Geometry Voronoi Diagrams Shireen Y. Elhabian Aly A. Farag University of Louisville March 2010 Pepperoni Sparse Pizzas Olive Sparse Pizzas Just Two Pepperonis A person gets the
! Linear programming"! Duality "! Smallest enclosing disk"
 ! Linear programming"! Duality "! Smallest enclosing disk" 14. 24.! Define:" " i types of foods (1!i!d).! " j types of vitamins (1!j!n)." " x i the amount of food of type i." " a ji the amount of vitamin
! Linear programming"! Duality "! Smallest enclosing disk" 14. 24.! Define:" " i types of foods (1!i!d).! " j types of vitamins (1!j!n)." " x i the amount of food of type i." " a ji the amount of vitamin
Chapter 12 and 11.1 Planar graphs, regular polyhedra, and graph colorings
 Chapter 12 and 11.1 Planar graphs, regular polyhedra, and graph colorings Prof. Tesler Math 184A Fall 2017 Prof. Tesler Ch. 12: Planar Graphs Math 184A / Fall 2017 1 / 45 12.1 12.2. Planar graphs Definition
Chapter 12 and 11.1 Planar graphs, regular polyhedra, and graph colorings Prof. Tesler Math 184A Fall 2017 Prof. Tesler Ch. 12: Planar Graphs Math 184A / Fall 2017 1 / 45 12.1 12.2. Planar graphs Definition
Polygon Partitioning. Lecture03
 1 Polygon Partitioning Lecture03 2 History of Triangulation Algorithms 3 Outline Monotone polygon Triangulation of monotone polygon Trapezoidal decomposition Decomposition in monotone mountain Convex decomposition
1 Polygon Partitioning Lecture03 2 History of Triangulation Algorithms 3 Outline Monotone polygon Triangulation of monotone polygon Trapezoidal decomposition Decomposition in monotone mountain Convex decomposition