Voronoi diagram and Delaunay triangulation
|
|
|
- Bryan Logan
- 5 years ago
- Views:
Transcription


1 Voronoi diagram and Delaunay triangulation Ioannis Emiris & Vissarion Fisikopoulos Dept. of Informatics & Telecommunications, University of Athens Computational Geometry, spring 2015
2 Outline 1 Voronoi diagram 2 Delaunay triangulation 3 Algorithms and complexity Voronoi algorithms 4 Generalizations and Representation
3 Outline 1 Voronoi diagram 2 Delaunay triangulation 3 Algorithms and complexity Voronoi algorithms 4 Generalizations and Representation
4 Example and definition Sites: P := {p 1,..., p n } R 2
5 Example and definition Sites: P := {p 1,..., p n } R 2 Voronoi cell: q V (p i ) dist(q, p i ) dist(q, p j ), p j P, j i
 dist(q, p i ) dist(q, p j ), p j P,")
6 Example and definition Sites: P := {p 1,..., p n } R 2 Voronoi cell: q V (p i ) dist(q, p i ) dist(q, p j ), p j P, j i Georgy F. Voronoy ( )
7 Faces of Voronoi diagram
8 Faces of Voronoi diagram
9 Faces of Voronoi diagram
10 Faces of Voronoi diagram
11 Faces of Voronoi diagram



12 Voronoi diagram
13 Formalization sites: points P = {p 1,..., p n } R 2. Voronoi cell/region V (p i ) of site p i : q V (p i ) dist(q, p i ) dist(q, p j ), p j P, j i. Voronoi edge is the common boundary of two adjacent cells. Voronoi vertex is the common boundary of 3 adjacent cells, or the intersection of 2 (hence 3) Voronoi edges. Generically, of exactly 3 Voronoi edges. Voronoi diagram of P = dual of Delaunay triangulation of P. Voronoi cell vertex of Delaunay triangles: site neighboring cells (Voronoi edge) Delaunay edge, defined by corresponding sites (line of Voronoi edge line of Delaunay edge) Voronoi vertex Delaunay triangle.
14 Outline 1 Voronoi diagram 2 Delaunay triangulation 3 Algorithms and complexity Voronoi algorithms 4 Generalizations and Representation
15 Triangulation A triangulation of a pointset (sites) P R 2 is a collection of triplets from P, namely triangles, s.t. The union of the triangles covers the convex hull of P. Every pair of triangles intersect at a (possibly empty) common face (, vertex, edge). Usually (CGAL): Set of triangle vertices = P. Example: P, incomplete, invalid, subdivision, triangulation.
16 Delaunay Triangulation: dual of Voronoi diagram
17 Delaunay Triangulation: dual of Voronoi diagram
18 Delaunay Triangulation: dual of Voronoi diagram

19 Delaunay Triangulation: dual of Voronoi diagram Boris N. Delaunay ( )
20 Delaunay triangulation: projection from parabola Definition/Construction of Delaunay triangulation: Lift sites p = (x) R to p = (x, x 2 ) R 2 Compute the convex hull of the lifted points Project the lower hull to R y = x 2 p 1 p 2 p 3 p 4
21 Delaunay triangulation: going a bit higher... Definition/Construction of Delaunay triangulation: Lift sites p = (x, y) R 2 to p = (x, y, x 2 +y 2 ) R 3 Compute the convex hull of the lifted points Project the lower hull to R 2 : arbitrarily triangulate lower facets that are polygons (not triangles)
22 Applications Nearest Neighbors Reconstruction Meshing
23 Main Delaunay property: empty sphere
24 Main Delaunay property: empty sphere
25 Main Delaunay property: empty sphere
26 Main Delaunay property: 1 picture proof Thm (in R): S(p 1, p 2 ) is a Delaunay segment its interior contains no p i. Proof. Delaunay segment ( p 1, p 2 ) edge of the Lower Hull no p i below ( p 1, p 2 ) on the parabola no p i inside the segment (p 1, p 2 ). y = x 2 p 1 p 2 p 3 p 4
27 Main Delaunay property: 1 picture proof Thm (in R 2 ): T (p 1, p 2, p 3 ) is a Delaunay triangle the interior of the circle through p 1, p 2, p 3 (enclosing circle) contains no p i. Proof. Circle(p 1, p 2, p 3 ) contains no p i in interior plane of lifted p 1, p 2, p 3 leaves all lifted p i on same halfspace CCW( p 1, p 2, p 3, p i ) of same sign for all i. Suffices to prove: p i lies on Circle(p 1, p 2, p 3 ) p i lies on plane of p 1, p 2, p 3 CCW( p 1, p 2, p 3, p i ) = 0.
28 Predicate InCircle Given points p, q, r, s R 2, point s = (s x, s y ) lies inside the circle through p, q, r det p x p y px 2 + py 2 1 q x q y qx 2 + qy 2 1 r x r y rx 2 + ry 2 1 s x s y sx 2 + sy 2 1 > 0, assuming p, q, r in clockwise order (otherwise det < 0). Lemma. InCircle(p, q, r, s) = 0 circle through p, q, r, s. Proof. InCircle(p, q, r, s) = 0 CCW ( p, q, r, ŝ) = 0
29 Delaunay faces Theorem. Let P be a set of sites R 2 : (i) Sites p i, p j, p k P are vertices of a Delaunay triangle the circle through p i, p j, p k contains no site of P in its interior. (ii) Sites p i, p j P form an edge of the Delaunay triangulation there is a closed disc C that contains p i, p j on its boundary and does not contain any other site of P.
30 Triangulations of planar pointsets Thm. Let P be set of n points in R 2, not all colinear, k = #points on boundary of CH(P). Any triangulation of P has 2n 2 k triangles and 3n 3 k edges. Proof. f: #facets (except ) e: #edges n: #vertices 1. Euler: n e + (f + 1) 1 = 1; for d-polytope: d i=0 ( 1)i f i = 1 2. Any planar triangulation: total degree = 3f + k = 2e.
31 Properties of Voronoi diagram Lemma. V 2n 5, E 3n 6, n = P, by Euler s theorem for planar graphs: V E + n 1 = 1. Max Empty Circle C P (q) centered at q: no interior site p i P. Lem: q R 2 is Voronoi vertex C(q) has 3 sites on perimeter Any perpendicular bisector of segment (p i, p j ) defines a Voronoi edge q on bisector s.t. C(q) has only p i, p j on perimeter
32 Delaunay maximizes the smallest angle Let T be a triangulation with m triangles. Sort the 3m angles: a 1 a 2 a 3m. T a := {a 1, a 2,..., a 3m }. Edge e = (p i, p j ) is illegal min 1 i 6 a i < min 1 i 6 a i. p l p l p j p j p i a a p i p k p k T obtained from T by flipping illegal e, then T a > lex T a. Flips yield triangulation without illegal edges. The algorithm terminates (angles decrease), but is O(n 2 ).
33 Insertion by flips 1 p r p j 2 3 p i p i pk 3 4 6
34 Outline 1 Voronoi diagram 2 Delaunay triangulation 3 Algorithms and complexity Voronoi algorithms 4 Generalizations and Representation
35 Lower bound Ω(n log n) by reduction from sorting (x i, x 2 i ) x i
36 Delaunay triangulation Theorem. Let P be a set of points R 2. A triangulation T of P has no illegal edge T is a Delaunay triangulation of P. Cor. Constructing the Delaunay triangulation is a fast (optimal) way of maximizing the min angle. Algorithms in R 2 : Lift, CH3, project the lower hull: O(n log n) Incremental algorithm: O(n log n) exp., O(n 2 ) worst Voronoi diagram (Fortune s sweep): O(n log n) Divide + Conquer: O(n log n) See Voronoi algo s below.
37 Incremental Delaunay
38 Incremental Delaunay
39 Incremental Delaunay Find triangles in conflict
40 Incremental Delaunay
41 Incremental Delaunay Delete triangles in conflict
42 Incremental Delaunay Triangulate hole
43 Voronoi by Lift & Project Lifting: Consider the paraboloid x 3 = x x x 2 3. For every site p, consider its lifted image p on the parabola. Given p, unique (hyper)plane tangent to the parabola at p. Project: For every (hyper)plane, consider the halfspace above. The intersection of halfspaces is a (unbounded) convex polytope Its Lower Hull projects bijectively to the Voronoi diagram. Proof: Let E : x x 2 2 x 3 = 0 be the paraboloid equation. E(a) = ( E x 1, E x 2, E x 3 )a = (2a 1, 2a 2, 1). Point x plane h(x) (x a) E(a) = 0 2a 1 (x 1 a 1 ) + 2a 2 (x 2 a 2 ) (x 3 a 3 ) = 0, which is h s equation.
44 Lift & Project in 1D y=x^2 h h y=0 p q p
45 Divide & Conquer
46 Fortune s sweep C pj pi v pk 2 events: L pi
47 Outline 1 Voronoi diagram 2 Delaunay triangulation 3 Algorithms and complexity Voronoi algorithms 4 Generalizations and Representation
48 General dimension polytopes Faces of a polytope are polytopes forming its extreme elements. A facet of a d-dimensional polytope is (d 1)-dimensional face: The facets of a segment are vertices (0-faces). The facets of a polygon are edges (1-faces) The facets of a 3-polyhedron are polygons. The facets of a 4d polytope are 3d polytopes.
49 General dimension triangulation A triangulation of a pointset (sites) P R d is a collection of (d + 1)-tuples from P, namely simplices, s.t. The union of the simplices covers the convex hull of P. Every pair of simplices intersect at a (possibly empty) common face. Usually: Set of simplex vertices = P. Delaunay: no site lies in the circum-hypersphere inscribing any simplex of the triangulation. In 3d, two simplices may intersect at:, vertex, edge, facet. The triangulation is unique for generic inputs, i.e. no d + 2 sites lie on same hypersphere, i.e. every d + 1 sites define unique simplex. A Delaunay facet belongs to: exactly one simplex iff it belongs to CH(P), otherwise belongs to exactly two (neighboring) simplices.
50 Complexity in general dimension Delaunay triangulation in R d convex hull in R d+1. Convex Hull of n points in R d is Θ(n log n + n d/2 ) Hence d-del = Θ(n log n + n d/2 ) Lower bound [McMullen] on space Complexity optimal deterministic [Chazelle], randomized [Seidel] algorithms Optimal algorithms by lift/project: R 2 : Θ(n log n), R 3 : Θ(n 2 ).
51 Generalized constructions In R 2 : Various geometric graphs defined on P are subgraphs of DT (P), e.g. Euclidean minimum spanning tree (EMST) of P. Delaunay triangulation DT (P) of pointset P R d : triangulation s.t. no site in P lies in the hypersphere inscribing any simplex of DT (P). DT (P) contains d-dimensional simplices. hypersphere = circum-hypersphere of simplex. DT (P) is unique for generic inputs, i.e. no d + 2 sites lie on the same hypersphere, i.e. every d + 1 sites define unique Delaunay triangle. R d : Delaunay facet belongs to exactly one simplex belongs to CH(P)
52 Plane Decomposition Representation Doubly Connected Edge List (DCEL) stores: vertices, edges and cells (faces); for every (undirected) edge: 2 twins (directed) half-edges. Space complexity: O( V + E + n), V = #vertices, E = #edges, n = #input sites. v: O(1): coordinates, pointer to half-edge where v is starting. half-e O(1): start v, right cell, pointer next/previous/twin half-e DCEL operations: Given cell c, edge e c, find (neighboring) cell c : e c : O(1) Given cell, print every edge of cell: O( E ). Given vertex v find all incident edges: O(#neighbors).
Voronoi diagrams Delaunay Triangulations. Pierre Alliez Inria
 Voronoi diagrams Delaunay Triangulations Pierre Alliez Inria Voronoi Diagram Voronoi Diagram Voronoi Diagram The collection of the non-empty Voronoi regions and their faces, together with their incidence
Voronoi diagrams Delaunay Triangulations Pierre Alliez Inria Voronoi Diagram Voronoi Diagram Voronoi Diagram The collection of the non-empty Voronoi regions and their faces, together with their incidence
Course 16 Geometric Data Structures for Computer Graphics. Voronoi Diagrams
 Course 16 Geometric Data Structures for Computer Graphics Voronoi Diagrams Dr. Elmar Langetepe Institut für Informatik I Universität Bonn Geometric Data Structures for CG July 27 th Voronoi Diagrams San
Course 16 Geometric Data Structures for Computer Graphics Voronoi Diagrams Dr. Elmar Langetepe Institut für Informatik I Universität Bonn Geometric Data Structures for CG July 27 th Voronoi Diagrams San
Chapter 8. Voronoi Diagrams. 8.1 Post Oce Problem
 Chapter 8 Voronoi Diagrams 8.1 Post Oce Problem Suppose there are n post oces p 1,... p n in a city. Someone who is located at a position q within the city would like to know which post oce is closest
Chapter 8 Voronoi Diagrams 8.1 Post Oce Problem Suppose there are n post oces p 1,... p n in a city. Someone who is located at a position q within the city would like to know which post oce is closest
CS 532: 3D Computer Vision 14 th Set of Notes
 1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
Lecture 3 Randomized Algorithms
 Lecture 3 Randomized Algorithms Jean-Daniel Boissonnat Winter School on Computational Geometry and Topology University of Nice Sophia Antipolis January 23-27, 2017 Computational Geometry and Topology Randomized
Lecture 3 Randomized Algorithms Jean-Daniel Boissonnat Winter School on Computational Geometry and Topology University of Nice Sophia Antipolis January 23-27, 2017 Computational Geometry and Topology Randomized
2D Geometry. Pierre Alliez Inria Sophia Antipolis
 2D Geometry Pierre Alliez Inria Sophia Antipolis Outline Sample problems Polygons Graphs Convex hull Voronoi diagram Delaunay triangulation Sample Problems Line Segment Intersection Theorem: Segments (p
2D Geometry Pierre Alliez Inria Sophia Antipolis Outline Sample problems Polygons Graphs Convex hull Voronoi diagram Delaunay triangulation Sample Problems Line Segment Intersection Theorem: Segments (p
CS133 Computational Geometry
 CS133 Computational Geometry Voronoi Diagram Delaunay Triangulation 5/17/2018 1 Nearest Neighbor Problem Given a set of points P and a query point q, find the closest point p P to q p, r P, dist p, q dist(r,
CS133 Computational Geometry Voronoi Diagram Delaunay Triangulation 5/17/2018 1 Nearest Neighbor Problem Given a set of points P and a query point q, find the closest point p P to q p, r P, dist p, q dist(r,
Computational Geometry
 Lecture 12: Lecture 12: Motivation: Terrains by interpolation To build a model of the terrain surface, we can start with a number of sample points where we know the height. Lecture 12: Motivation: Terrains
Lecture 12: Lecture 12: Motivation: Terrains by interpolation To build a model of the terrain surface, we can start with a number of sample points where we know the height. Lecture 12: Motivation: Terrains
Voronoi Diagrams, Delaunay Triangulations and Polytopes
 Voronoi Diagrams, Delaunay Triangulations and Polytopes Jean-Daniel Boissonnat MPRI, Lecture 2 Computational Geometry Learning Voronoi, Delaunay & Polytopes MPRI, Lecture 2 1 / 43 Voronoi diagrams in nature
Voronoi Diagrams, Delaunay Triangulations and Polytopes Jean-Daniel Boissonnat MPRI, Lecture 2 Computational Geometry Learning Voronoi, Delaunay & Polytopes MPRI, Lecture 2 1 / 43 Voronoi diagrams in nature
Voronoi Diagrams in the Plane. Chapter 5 of O Rourke text Chapter 7 and 9 of course text
 Voronoi Diagrams in the Plane Chapter 5 of O Rourke text Chapter 7 and 9 of course text Voronoi Diagrams As important as convex hulls Captures the neighborhood (proximity) information of geometric objects
Voronoi Diagrams in the Plane Chapter 5 of O Rourke text Chapter 7 and 9 of course text Voronoi Diagrams As important as convex hulls Captures the neighborhood (proximity) information of geometric objects
Voronoi Diagrams and Delaunay Triangulations. O Rourke, Chapter 5
 Voronoi Diagrams and Delaunay Triangulations O Rourke, Chapter 5 Outline Preliminaries Properties and Applications Computing the Delaunay Triangulation Preliminaries Given a function f: R 2 R, the tangent
Voronoi Diagrams and Delaunay Triangulations O Rourke, Chapter 5 Outline Preliminaries Properties and Applications Computing the Delaunay Triangulation Preliminaries Given a function f: R 2 R, the tangent
6.854J / J Advanced Algorithms Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 6.854J / 18.415J Advanced Algorithms Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 18.415/6.854 Advanced
MIT OpenCourseWare http://ocw.mit.edu 6.854J / 18.415J Advanced Algorithms Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 18.415/6.854 Advanced
Geometric Algorithms in Three Dimensions Tutorial. FSP Seminar, Strobl,
 Geometric Algorithms in Three Dimensions Tutorial FSP Seminar, Strobl, 22.06.2006 Why Algorithms in Three and Higher Dimensions Which algorithms (convex hulls, triangulations etc.) can be generalized to
Geometric Algorithms in Three Dimensions Tutorial FSP Seminar, Strobl, 22.06.2006 Why Algorithms in Three and Higher Dimensions Which algorithms (convex hulls, triangulations etc.) can be generalized to
Advanced Algorithms Computational Geometry Prof. Karen Daniels. Fall, 2012
 UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 Voronoi Diagrams & Delaunay Triangulations O Rourke: Chapter 5 de Berg et al.: Chapters 7,
UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 Voronoi Diagrams & Delaunay Triangulations O Rourke: Chapter 5 de Berg et al.: Chapters 7,
CMPS 3130/6130 Computational Geometry Spring Voronoi Diagrams. Carola Wenk. Based on: Computational Geometry: Algorithms and Applications
 CMPS 3130/6130 Computational Geometry Spring 2015 Voronoi Diagrams Carola Wenk Based on: Computational Geometry: Algorithms and Applications 2/19/15 CMPS 3130/6130 Computational Geometry 1 Voronoi Diagram
CMPS 3130/6130 Computational Geometry Spring 2015 Voronoi Diagrams Carola Wenk Based on: Computational Geometry: Algorithms and Applications 2/19/15 CMPS 3130/6130 Computational Geometry 1 Voronoi Diagram
COMPUTATIONAL GEOMETRY
 Thursday, September 20, 2007 (Ming C. Lin) Review on Computational Geometry & Collision Detection for Convex Polytopes COMPUTATIONAL GEOMETRY (Refer to O'Rourke's and Dutch textbook ) 1. Extreme Points
Thursday, September 20, 2007 (Ming C. Lin) Review on Computational Geometry & Collision Detection for Convex Polytopes COMPUTATIONAL GEOMETRY (Refer to O'Rourke's and Dutch textbook ) 1. Extreme Points
Computational Geometry
 Computational Geometry 600.658 Convexity A set S is convex if for any two points p, q S the line segment pq S. S p S q Not convex Convex? Convexity A set S is convex if it is the intersection of (possibly
Computational Geometry 600.658 Convexity A set S is convex if for any two points p, q S the line segment pq S. S p S q Not convex Convex? Convexity A set S is convex if it is the intersection of (possibly
be a polytope. has such a representation iff it contains the origin in its interior. For a generic, sort the inequalities so that
 ( Shelling (Bruggesser-Mani 1971) and Ranking Let be a polytope. has such a representation iff it contains the origin in its interior. For a generic, sort the inequalities so that. a ranking of vertices
( Shelling (Bruggesser-Mani 1971) and Ranking Let be a polytope. has such a representation iff it contains the origin in its interior. For a generic, sort the inequalities so that. a ranking of vertices
CAD & Computational Geometry Course plan
 Course plan Introduction Segment-Segment intersections Polygon Triangulation Intro to Voronoï Diagrams & Geometric Search Sweeping algorithm for Voronoï Diagrams 1 Voronoi Diagrams Voronoi Diagrams or
Course plan Introduction Segment-Segment intersections Polygon Triangulation Intro to Voronoï Diagrams & Geometric Search Sweeping algorithm for Voronoï Diagrams 1 Voronoi Diagrams Voronoi Diagrams or
Computational Geometry Lecture Duality of Points and Lines
 Computational Geometry Lecture Duality of Points and Lines INSTITUTE FOR THEORETICAL INFORMATICS FACULTY OF INFORMATICS 11.1.2016 Duality Transforms We have seen duality for planar graphs and duality of
Computational Geometry Lecture Duality of Points and Lines INSTITUTE FOR THEORETICAL INFORMATICS FACULTY OF INFORMATICS 11.1.2016 Duality Transforms We have seen duality for planar graphs and duality of
CS S Lecture February 13, 2017
 CS 6301.008.18S Lecture February 13, 2017 Main topics are #Voronoi-diagrams, #Fortune. Quick Note about Planar Point Location Last week, I started giving a difficult analysis of the planar point location
CS 6301.008.18S Lecture February 13, 2017 Main topics are #Voronoi-diagrams, #Fortune. Quick Note about Planar Point Location Last week, I started giving a difficult analysis of the planar point location
Computational Geometry. Algorithm Design (10) Computational Geometry. Convex Hull. Areas in Computational Geometry
 Computational Geometry. Convex Hull. Areas in Computational Geometry") Computational Geometry Algorithm Design (10) Computational Geometry Graduate School of Engineering Takashi Chikayama Algorithms formulated as geometry problems Broad application areas Computer Graphics,
Computational Geometry Algorithm Design (10) Computational Geometry Graduate School of Engineering Takashi Chikayama Algorithms formulated as geometry problems Broad application areas Computer Graphics,
Delaunay Triangulations
 Delaunay Triangulations (slides mostly by Glenn Eguchi) Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally approximate height of points not
Delaunay Triangulations (slides mostly by Glenn Eguchi) Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally approximate height of points not
Lecture 1 Discrete Geometric Structures
 Lecture 1 Discrete Geometric Structures Jean-Daniel Boissonnat Winter School on Computational Geometry and Topology University of Nice Sophia Antipolis January 23-27, 2017 Computational Geometry and Topology
Lecture 1 Discrete Geometric Structures Jean-Daniel Boissonnat Winter School on Computational Geometry and Topology University of Nice Sophia Antipolis January 23-27, 2017 Computational Geometry and Topology
High-Dimensional Computational Geometry. Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018
 High-Dimensional Computational Geometry Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018 Outline 3-D vector geometry High-D hyperplane intersections Convex hull & its extension to 3
High-Dimensional Computational Geometry Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018 Outline 3-D vector geometry High-D hyperplane intersections Convex hull & its extension to 3
Planar Graphs. 1 Graphs and maps. 1.1 Planarity and duality
 Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Voronoi Diagrams and Delaunay Triangulation slides by Andy Mirzaian (a subset of the original slides are used here)
") Voronoi Diagrams and Delaunay Triangulation slides by Andy Mirzaian (a subset of the original slides are used here) Voronoi Diagram & Delaunay Triangualtion Algorithms Divide-&-Conquer Plane Sweep Lifting
Voronoi Diagrams and Delaunay Triangulation slides by Andy Mirzaian (a subset of the original slides are used here) Voronoi Diagram & Delaunay Triangualtion Algorithms Divide-&-Conquer Plane Sweep Lifting
Computational Geometry
 Lecture 1: Introduction and convex hulls Geometry: points, lines,... Geometric objects Geometric relations Combinatorial complexity Computational geometry Plane (two-dimensional), R 2 Space (three-dimensional),
Lecture 1: Introduction and convex hulls Geometry: points, lines,... Geometric objects Geometric relations Combinatorial complexity Computational geometry Plane (two-dimensional), R 2 Space (three-dimensional),
Computational Geometry
 Computational Geometry Range queries Convex hulls Lower bounds Planar subdivision search Line segment intersection Convex polygons Voronoi diagrams Minimum spanning trees Nearest neighbors Triangulations
Computational Geometry Range queries Convex hulls Lower bounds Planar subdivision search Line segment intersection Convex polygons Voronoi diagrams Minimum spanning trees Nearest neighbors Triangulations
Computational Geometry Lecture Delaunay Triangulation
 Computational Geometry Lecture Delaunay Triangulation INSTITUTE FOR THEORETICAL INFORMATICS FACULTY OF INFORMATICS 7.12.2015 1 Modelling a Terrain Sample points p = (x p, y p, z p ) Projection π(p) = (p
Computational Geometry Lecture Delaunay Triangulation INSTITUTE FOR THEORETICAL INFORMATICS FACULTY OF INFORMATICS 7.12.2015 1 Modelling a Terrain Sample points p = (x p, y p, z p ) Projection π(p) = (p
CS 372: Computational Geometry Lecture 10 Linear Programming in Fixed Dimension
 CS 372: Computational Geometry Lecture 10 Linear Programming in Fixed Dimension Antoine Vigneron King Abdullah University of Science and Technology November 7, 2012 Antoine Vigneron (KAUST) CS 372 Lecture
CS 372: Computational Geometry Lecture 10 Linear Programming in Fixed Dimension Antoine Vigneron King Abdullah University of Science and Technology November 7, 2012 Antoine Vigneron (KAUST) CS 372 Lecture
Delaunay Triangulations. Presented by Glenn Eguchi Computational Geometry October 11, 2001
 Delaunay Triangulations Presented by Glenn Eguchi 6.838 Computational Geometry October 11, 2001 Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally
Delaunay Triangulations Presented by Glenn Eguchi 6.838 Computational Geometry October 11, 2001 Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally
Linear Programming in Small Dimensions
 Linear Programming in Small Dimensions Lekcija 7 sergio.cabello@fmf.uni-lj.si FMF Univerza v Ljubljani Edited from slides by Antoine Vigneron Outline linear programming, motivation and definition one dimensional
Linear Programming in Small Dimensions Lekcija 7 sergio.cabello@fmf.uni-lj.si FMF Univerza v Ljubljani Edited from slides by Antoine Vigneron Outline linear programming, motivation and definition one dimensional
Line segment intersection. Family of intersection problems
 CG Lecture 2 Line segment intersection Intersecting two line segments Line sweep algorithm Convex polygon intersection Boolean operations on polygons Subdivision overlay algorithm 1 Family of intersection
CG Lecture 2 Line segment intersection Intersecting two line segments Line sweep algorithm Convex polygon intersection Boolean operations on polygons Subdivision overlay algorithm 1 Family of intersection
Week 8 Voronoi Diagrams
 1 Week 8 Voronoi Diagrams 2 Voronoi Diagram Very important problem in Comp. Geo. Discussed back in 1850 by Dirichlet Published in a paper by Voronoi in 1908 3 Voronoi Diagram Fire observation towers: an
1 Week 8 Voronoi Diagrams 2 Voronoi Diagram Very important problem in Comp. Geo. Discussed back in 1850 by Dirichlet Published in a paper by Voronoi in 1908 3 Voronoi Diagram Fire observation towers: an
Notes in Computational Geometry Voronoi Diagrams
 Notes in Computational Geometry Voronoi Diagrams Prof. Sandeep Sen and Prof. Amit Kumar Indian Institute of Technology, Delhi Voronoi Diagrams In this lecture, we study Voronoi Diagrams, also known as
Notes in Computational Geometry Voronoi Diagrams Prof. Sandeep Sen and Prof. Amit Kumar Indian Institute of Technology, Delhi Voronoi Diagrams In this lecture, we study Voronoi Diagrams, also known as
3. Voronoi Diagrams. 3.1 Definitions & Basic Properties. Examples :
 3. Voronoi Diagrams Examples : 1. Fire Observation Towers Imagine a vast forest containing a number of fire observation towers. Each ranger is responsible for extinguishing any fire closer to her tower
3. Voronoi Diagrams Examples : 1. Fire Observation Towers Imagine a vast forest containing a number of fire observation towers. Each ranger is responsible for extinguishing any fire closer to her tower
CSE 5311 Notes 13: Computational Geometry
 CSE 5311 Notes 13: Computational Geometry (Last updated 4/17/17 4:39 PM) SMALLEST ENCLOSING DISK See section 4.7 of de Berg ( http://dx.doi.org.ezproxy.uta.edu/10.1007/978-3-540-77974-2 ) Algorithm MINIDISC(P)
CSE 5311 Notes 13: Computational Geometry (Last updated 4/17/17 4:39 PM) SMALLEST ENCLOSING DISK See section 4.7 of de Berg ( http://dx.doi.org.ezproxy.uta.edu/10.1007/978-3-540-77974-2 ) Algorithm MINIDISC(P)
In what follows, we will focus on Voronoi diagrams in Euclidean space. Later, we will generalize to other distance spaces.
 Voronoi Diagrams 4 A city builds a set of post offices, and now needs to determine which houses will be served by which office. It would be wasteful for a postman to go out of their way to make a delivery
Voronoi Diagrams 4 A city builds a set of post offices, and now needs to determine which houses will be served by which office. It would be wasteful for a postman to go out of their way to make a delivery
Computational Geometry: Lecture 5
 Computational Geometry: Lecture 5 Don Sheehy January 29, 2010 1 Degeneracy In many of the algorithms that we have discussed so far, we have run into problems when that input is somehow troublesome. For
Computational Geometry: Lecture 5 Don Sheehy January 29, 2010 1 Degeneracy In many of the algorithms that we have discussed so far, we have run into problems when that input is somehow troublesome. For
PS Computational Geometry Homework Assignment Sheet I (Due 16-March-2018)
") Homework Assignment Sheet I (Due 16-March-2018) Assignment 1 Let f, g : N R with f(n) := 8n + 4 and g(n) := 1 5 n log 2 n. Prove explicitly that f O(g) and f o(g). Assignment 2 How can you generalize the
Homework Assignment Sheet I (Due 16-March-2018) Assignment 1 Let f, g : N R with f(n) := 8n + 4 and g(n) := 1 5 n log 2 n. Prove explicitly that f O(g) and f o(g). Assignment 2 How can you generalize the
3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College
![3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College](/thumbs/75/72944672.jpg "3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College") 3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hull in 3D The problem: Given a set P of points in 3D, compute their convex hull convex polyhedron 2D 3D polygon
3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hull in 3D The problem: Given a set P of points in 3D, compute their convex hull convex polyhedron 2D 3D polygon
An Introduction to Computational Geometry: Arrangements and Duality
 An Introduction to Computational Geometry: Arrangements and Duality Joseph S. B. Mitchell Stony Brook University Some images from [O Rourke, Computational Geometry in C, 2 nd Edition, Chapter 6] Arrangement
An Introduction to Computational Geometry: Arrangements and Duality Joseph S. B. Mitchell Stony Brook University Some images from [O Rourke, Computational Geometry in C, 2 nd Edition, Chapter 6] Arrangement
Voronoi Diagram. Xiao-Ming Fu
 Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
Week 7 Convex Hulls in 3D
 1 Week 7 Convex Hulls in 3D 2 Polyhedra A polyhedron is the natural generalization of a 2D polygon to 3D 3 Closed Polyhedral Surface A closed polyhedral surface is a finite set of interior disjoint polygons
1 Week 7 Convex Hulls in 3D 2 Polyhedra A polyhedron is the natural generalization of a 2D polygon to 3D 3 Closed Polyhedral Surface A closed polyhedral surface is a finite set of interior disjoint polygons
Other Voronoi/Delaunay Structures
 Other Voronoi/Delaunay Structures Overview Alpha hulls (a subset of Delaunay graph) Extension of Voronoi Diagrams Convex Hull What is it good for? The bounding region of a point set Not so good for describing
Other Voronoi/Delaunay Structures Overview Alpha hulls (a subset of Delaunay graph) Extension of Voronoi Diagrams Convex Hull What is it good for? The bounding region of a point set Not so good for describing
Lecture 16: Voronoi Diagrams and Fortune s Algorithm
 contains q changes as a result of the ith insertion. Let P i denote this probability (where the probability is taken over random insertion orders, irrespective of the choice of q). Since q could fall through
contains q changes as a result of the ith insertion. Let P i denote this probability (where the probability is taken over random insertion orders, irrespective of the choice of q). Since q could fall through
Fortune s Algorithm. Notes from the book by de Berg, Van Krevald, Overmars, and Schwarzkpf
 Notes from the book by de Berg, Van Krevald, Overmars, and Schwarzkpf Based on sweeping the plane with a horizontal line and computing the Voronoi diagram as the line sweeps Straight forward approach won
Notes from the book by de Berg, Van Krevald, Overmars, and Schwarzkpf Based on sweeping the plane with a horizontal line and computing the Voronoi diagram as the line sweeps Straight forward approach won
Insertions and Deletions in Delaunay Triangulations using Guided Point Location. Kevin Buchin TU Eindhoven
 Insertions and Deletions in Delaunay Triangulations using Guided Point Location Kevin Buchin TU Eindhoven Heraklion, 21.1.2013 Guide - Example Construct Delaunay triangulation of convex polygon in linear
Insertions and Deletions in Delaunay Triangulations using Guided Point Location Kevin Buchin TU Eindhoven Heraklion, 21.1.2013 Guide - Example Construct Delaunay triangulation of convex polygon in linear
Delaunay Triangulation
 Delaunay Triangulation Steve Oudot slides courtesy of O. Devillers MST MST MST use Kruskal s algorithm with Del as input O(n log n) Last: lower bound for Delaunay Let x 1, x 2,..., x n R, to be sorted
Delaunay Triangulation Steve Oudot slides courtesy of O. Devillers MST MST MST use Kruskal s algorithm with Del as input O(n log n) Last: lower bound for Delaunay Let x 1, x 2,..., x n R, to be sorted
Midpoint Routing algorithms for Delaunay Triangulations
 Midpoint Routing algorithms for Delaunay Triangulations Weisheng Si and Albert Y. Zomaya Centre for Distributed and High Performance Computing School of Information Technologies Prologue The practical
Midpoint Routing algorithms for Delaunay Triangulations Weisheng Si and Albert Y. Zomaya Centre for Distributed and High Performance Computing School of Information Technologies Prologue The practical
2 Delaunay Triangulations
 and the closed half-space H(b, a) containingb and with boundary the bisector hyperplane is the locus of all points such that (b 1 a 1 )x 1 + +(b m a m )x m (b 2 1 + + b 2 m)/2 (a 2 1 + + a 2 m)/2. The
and the closed half-space H(b, a) containingb and with boundary the bisector hyperplane is the locus of all points such that (b 1 a 1 )x 1 + +(b m a m )x m (b 2 1 + + b 2 m)/2 (a 2 1 + + a 2 m)/2. The
Math 414 Lecture 2 Everyone have a laptop?
 Math 44 Lecture 2 Everyone have a laptop? THEOREM. Let v,...,v k be k vectors in an n-dimensional space and A = [v ;...; v k ] v,..., v k independent v,..., v k span the space v,..., v k a basis v,...,
Math 44 Lecture 2 Everyone have a laptop? THEOREM. Let v,...,v k be k vectors in an n-dimensional space and A = [v ;...; v k ] v,..., v k independent v,..., v k span the space v,..., v k a basis v,...,
Simplicial Cells in Arrangements of Hyperplanes
 Simplicial Cells in Arrangements of Hyperplanes Christoph Dätwyler 05.01.2013 This paper is a report written due to the authors presentation of a paper written by Shannon [1] in 1977. The presentation
Simplicial Cells in Arrangements of Hyperplanes Christoph Dätwyler 05.01.2013 This paper is a report written due to the authors presentation of a paper written by Shannon [1] in 1977. The presentation
Computational Geometry
 Motivation Motivation Polygons and visibility Visibility in polygons Triangulation Proof of the Art gallery theorem Two points in a simple polygon can see each other if their connecting line segment is
Motivation Motivation Polygons and visibility Visibility in polygons Triangulation Proof of the Art gallery theorem Two points in a simple polygon can see each other if their connecting line segment is
Outline. CGAL par l exemplel. Current Partners. The CGAL Project.
 CGAL par l exemplel Computational Geometry Algorithms Library Raphaëlle Chaine Journées Informatique et GéomG ométrie 1 er Juin 2006 - LIRIS Lyon Outline Overview Strengths Design Structure Kernel Convex
CGAL par l exemplel Computational Geometry Algorithms Library Raphaëlle Chaine Journées Informatique et GéomG ométrie 1 er Juin 2006 - LIRIS Lyon Outline Overview Strengths Design Structure Kernel Convex
Figure 2.1: An example of a convex set and a nonconvex one.
 Convex Hulls 2.1 Definitions 2 Convexity is the key to understanding and simplifying geometry, and the convex hull plays a role in geometry akin to the sorted order for a collection of numbers. So what
Convex Hulls 2.1 Definitions 2 Convexity is the key to understanding and simplifying geometry, and the convex hull plays a role in geometry akin to the sorted order for a collection of numbers. So what
7 Voronoi Diagrams. The Post Office Problem
 7 Voronoi Diagrams The Post Office Problem Suppose you are on the advisory board for the planning of a supermarket chain, and there are plans to open a new branch at a certain location. To predict whether
7 Voronoi Diagrams The Post Office Problem Suppose you are on the advisory board for the planning of a supermarket chain, and there are plans to open a new branch at a certain location. To predict whether
Flavor of Computational Geometry. Voronoi Diagrams. Shireen Y. Elhabian Aly A. Farag University of Louisville
 Flavor of Computational Geometry Voronoi Diagrams Shireen Y. Elhabian Aly A. Farag University of Louisville March 2010 Pepperoni Sparse Pizzas Olive Sparse Pizzas Just Two Pepperonis A person gets the
Flavor of Computational Geometry Voronoi Diagrams Shireen Y. Elhabian Aly A. Farag University of Louisville March 2010 Pepperoni Sparse Pizzas Olive Sparse Pizzas Just Two Pepperonis A person gets the
COMPUTING CONSTRAINED DELAUNAY
 COMPUTING CONSTRAINED DELAUNAY TRIANGULATIONS IN THE PLANE By Samuel Peterson, University of Minnesota Undergraduate The Goal The Problem The Algorithms The Implementation Applications Acknowledgments
COMPUTING CONSTRAINED DELAUNAY TRIANGULATIONS IN THE PLANE By Samuel Peterson, University of Minnesota Undergraduate The Goal The Problem The Algorithms The Implementation Applications Acknowledgments
G 6i try. On the Number of Minimal 1-Steiner Trees* Discrete Comput Geom 12:29-34 (1994)
") Discrete Comput Geom 12:29-34 (1994) G 6i try 9 1994 Springer-Verlag New York Inc. On the Number of Minimal 1-Steiner Trees* B. Aronov, 1 M. Bern, 2 and D. Eppstein 3 Computer Science Department, Polytechnic
Discrete Comput Geom 12:29-34 (1994) G 6i try 9 1994 Springer-Verlag New York Inc. On the Number of Minimal 1-Steiner Trees* B. Aronov, 1 M. Bern, 2 and D. Eppstein 3 Computer Science Department, Polytechnic
Lifting Transform, Voronoi, Delaunay, Convex Hulls
 Lifting Transform, Voronoi, Delaunay, Convex Hulls Subhash Suri Department of Computer Science University of California Santa Barbara, CA 93106 1 Lifting Transform (A combination of Pless notes and my
Lifting Transform, Voronoi, Delaunay, Convex Hulls Subhash Suri Department of Computer Science University of California Santa Barbara, CA 93106 1 Lifting Transform (A combination of Pless notes and my
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass
 Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Quadratic and cubic b-splines by generalizing higher-order voronoi diagrams
 Quadratic and cubic b-splines by generalizing higher-order voronoi diagrams Yuanxin Liu and Jack Snoeyink Joshua Levine April 18, 2007 Computer Science and Engineering, The Ohio State University 1 / 24
Quadratic and cubic b-splines by generalizing higher-order voronoi diagrams Yuanxin Liu and Jack Snoeyink Joshua Levine April 18, 2007 Computer Science and Engineering, The Ohio State University 1 / 24
Outline of the presentation
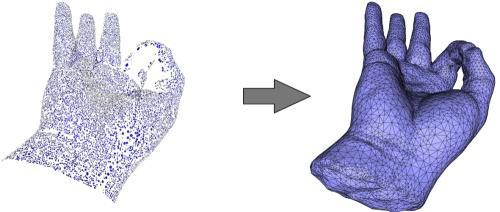
 Surface Reconstruction Petra Surynková Charles University in Prague Faculty of Mathematics and Physics petra.surynkova@mff.cuni.cz Outline of the presentation My work up to now Surfaces of Building Practice
Surface Reconstruction Petra Surynková Charles University in Prague Faculty of Mathematics and Physics petra.surynkova@mff.cuni.cz Outline of the presentation My work up to now Surfaces of Building Practice
VORONOI DIAGRAM PETR FELKEL. FEL CTU PRAGUE Based on [Berg] and [Mount]
![VORONOI DIAGRAM PETR FELKEL. FEL CTU PRAGUE Based on [Berg] and [Mount]](/thumbs/88/116547690.jpg "VORONOI DIAGRAM PETR FELKEL. FEL CTU PRAGUE Based on [Berg] and [Mount]") VORONOI DIAGRAM PETR FELKEL FEL CTU PRAGUE felkel@fel.cvut.cz https://cw.felk.cvut.cz/doku.php/courses/a4m39vg/start Based on [Berg] and [Mount] Version from 9.11.2017 Talk overview Definition and examples
VORONOI DIAGRAM PETR FELKEL FEL CTU PRAGUE felkel@fel.cvut.cz https://cw.felk.cvut.cz/doku.php/courses/a4m39vg/start Based on [Berg] and [Mount] Version from 9.11.2017 Talk overview Definition and examples
1/60. Geometric Algorithms. Lecture 1: Introduction. Convex Hulls
 1/60 Geometric Algorithms Lecture 1: Introduction Convex Hulls Geometric algorithms scope 2/60 Geometry algorithms (practice): Study of geometric problems that arise in various applications and how algorithms
1/60 Geometric Algorithms Lecture 1: Introduction Convex Hulls Geometric algorithms scope 2/60 Geometry algorithms (practice): Study of geometric problems that arise in various applications and how algorithms
Voronoi Diagrams. A Voronoi diagram records everything one would ever want to know about proximity to a set of points
 Voronoi Diagrams Voronoi Diagrams A Voronoi diagram records everything one would ever want to know about proximity to a set of points Who is closest to whom? Who is furthest? We will start with a series
Voronoi Diagrams Voronoi Diagrams A Voronoi diagram records everything one would ever want to know about proximity to a set of points Who is closest to whom? Who is furthest? We will start with a series
Convex Hulls in Three Dimensions. Polyhedra
 Convex Hulls in Three Dimensions Polyhedra Polyhedron 1.A polyhedron is the generalization of a 2- D polygon to 3-D A finite number of flat polygonal faces The boundary or surface of a polyhedron - Zero-dimensional
Convex Hulls in Three Dimensions Polyhedra Polyhedron 1.A polyhedron is the generalization of a 2- D polygon to 3-D A finite number of flat polygonal faces The boundary or surface of a polyhedron - Zero-dimensional
Convex hulls of spheres and convex hulls of convex polytopes lying on parallel hyperplanes
 Convex hulls of spheres and convex hulls of convex polytopes lying on parallel hyperplanes Menelaos I. Karavelas joint work with Eleni Tzanaki University of Crete & FO.R.T.H. OrbiCG/ Workshop on Computational
Convex hulls of spheres and convex hulls of convex polytopes lying on parallel hyperplanes Menelaos I. Karavelas joint work with Eleni Tzanaki University of Crete & FO.R.T.H. OrbiCG/ Workshop on Computational
Wolfgang Mulzer Institut für Informatik. Planar Delaunay Triangulations and Proximity Structures
 Wolfgang Mulzer Institut für Informatik Planar Delaunay Triangulations and Proximity Structures Proximity Structures Given: a set P of n points in the plane proximity structure: a structure that encodes
Wolfgang Mulzer Institut für Informatik Planar Delaunay Triangulations and Proximity Structures Proximity Structures Given: a set P of n points in the plane proximity structure: a structure that encodes
Problèmes de robustesse en géométrie algorithmique
 Problèmes de robustesse en géométrie algorithmique Monique Teillaud ENS - 12 mars 2008 Computational geometry Solving geometric problems algorithms complexity analysis worst case, average, randomized implementation
Problèmes de robustesse en géométrie algorithmique Monique Teillaud ENS - 12 mars 2008 Computational geometry Solving geometric problems algorithms complexity analysis worst case, average, randomized implementation
Dirichlet Voronoi Diagrams and Delaunay Triangulations
 Chapter 9 Dirichlet Voronoi Diagrams and Delaunay Triangulations 9.1 Dirichlet Voronoi Diagrams In this chapter we present very briefly the concepts of a Voronoi diagram and of a Delaunay triangulation.
Chapter 9 Dirichlet Voronoi Diagrams and Delaunay Triangulations 9.1 Dirichlet Voronoi Diagrams In this chapter we present very briefly the concepts of a Voronoi diagram and of a Delaunay triangulation.
Convex Hulls in 3D. Definitions. Size of a Convex Hull in 3D. Collision detection: The smallest volume polyhedral that contains a set of points in 3D.
 Convex Hulls in 3D SMD156 Lecture 11 Convex Hulls in Higher Dimensions Voronoi diagrams 3D Incremental Algorithm Collision detection: 1 2 Definitions The smallest volume polyhedral that contains a set
Convex Hulls in 3D SMD156 Lecture 11 Convex Hulls in Higher Dimensions Voronoi diagrams 3D Incremental Algorithm Collision detection: 1 2 Definitions The smallest volume polyhedral that contains a set
Average case analysis of dynamic geometric optimization
 Average case analysis of dynamic geometric optimization David Eppstein Department of Information and Computer Science University of California, Irvine, CA 92717 May 19, 1995 Abstract We maintain the maximum
Average case analysis of dynamic geometric optimization David Eppstein Department of Information and Computer Science University of California, Irvine, CA 92717 May 19, 1995 Abstract We maintain the maximum
Lecture 3 (CGAL) Panos Giannopoulos, Dror Atariah AG TI WS 2012/13
 Panos Giannopoulos, Dror Atariah AG TI WS 2012/13") Lecture 3 (CGAL) Panos Giannopoulos Dror Atariah AG TI WS 2012/13 Exercises? Outline Convex Hull in 3d Polyhedra and the Half Edge (or DCEL) data structure Exercise 3 3 stated above each λi is non-negative
Lecture 3 (CGAL) Panos Giannopoulos Dror Atariah AG TI WS 2012/13 Exercises? Outline Convex Hull in 3d Polyhedra and the Half Edge (or DCEL) data structure Exercise 3 3 stated above each λi is non-negative
Art Gallery, Triangulation, and Voronoi Regions
 Art Gallery, Triangulation, and Voronoi Regions CS535 Fall 2016 Daniel G. Aliaga Department of Computer Science Purdue University [some slides based on Profs. Shmuel Wimer and Andy Mirzaian Topics Triangulation
Art Gallery, Triangulation, and Voronoi Regions CS535 Fall 2016 Daniel G. Aliaga Department of Computer Science Purdue University [some slides based on Profs. Shmuel Wimer and Andy Mirzaian Topics Triangulation
Computational Geometry
 Casting a polyhedron CAD/CAM systems CAD/CAM systems allow you to design objects and test how they can be constructed Many objects are constructed used a mold Casting Casting A general question: Given
Casting a polyhedron CAD/CAM systems CAD/CAM systems allow you to design objects and test how they can be constructed Many objects are constructed used a mold Casting Casting A general question: Given
Optimal Compression of a Polyline with Segments and Arcs
 Optimal Compression of a Polyline with Segments and Arcs Alexander Gribov Esri 380 New York Street Redlands, CA 92373 Email: agribov@esri.com arxiv:1604.07476v5 [cs.cg] 10 Apr 2017 Abstract This paper
Optimal Compression of a Polyline with Segments and Arcs Alexander Gribov Esri 380 New York Street Redlands, CA 92373 Email: agribov@esri.com arxiv:1604.07476v5 [cs.cg] 10 Apr 2017 Abstract This paper
Computational Geometry. EDU - Tutorial on Computational Geometry (9201)
") Computational Geometry EDU - Tutorial on Computational Geometry (9201) Oswin Aichholzer / Thomas Hackl 20 th / 21 st June 2006, TU Graz Martin Peternell / Tibor Steiner 22 nd June 2006, TU Wien Thomas
Computational Geometry EDU - Tutorial on Computational Geometry (9201) Oswin Aichholzer / Thomas Hackl 20 th / 21 st June 2006, TU Graz Martin Peternell / Tibor Steiner 22 nd June 2006, TU Wien Thomas
Möbius Transformations in Scientific Computing. David Eppstein
 Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Linear Programming and its Applications
 Linear Programming and its Applications Outline for Today What is linear programming (LP)? Examples Formal definition Geometric intuition Why is LP useful? A first look at LP algorithms Duality Linear
Linear Programming and its Applications Outline for Today What is linear programming (LP)? Examples Formal definition Geometric intuition Why is LP useful? A first look at LP algorithms Duality Linear
Surface Mesh Generation
 Surface Mesh Generation J.-F. Remacle Université catholique de Louvain September 22, 2011 0 3D Model For the description of the mesh generation process, let us consider the CAD model of a propeller presented
Surface Mesh Generation J.-F. Remacle Université catholique de Louvain September 22, 2011 0 3D Model For the description of the mesh generation process, let us consider the CAD model of a propeller presented
MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces
 MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces David L. Finn Today, we continue our discussion of subdivision surfaces, by first looking in more detail at the midpoint method and
MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces David L. Finn Today, we continue our discussion of subdivision surfaces, by first looking in more detail at the midpoint method and
Simplicial Complexes: Second Lecture
 Simplicial Complexes: Second Lecture 4 Nov, 2010 1 Overview Today we have two main goals: Prove that every continuous map between triangulable spaces can be approximated by a simplicial map. To do this,
Simplicial Complexes: Second Lecture 4 Nov, 2010 1 Overview Today we have two main goals: Prove that every continuous map between triangulable spaces can be approximated by a simplicial map. To do this,
Search and Intersection. O Rourke, Chapter 7 de Berg et al., Chapter 11
 Search and Intersection O Rourke, Chapter 7 de Berg et al., Chapter 11 Announcements Assignment 3 web-page has been updated: Additional extra credit Hints for managing a dynamic half-edge representation
Search and Intersection O Rourke, Chapter 7 de Berg et al., Chapter 11 Announcements Assignment 3 web-page has been updated: Additional extra credit Hints for managing a dynamic half-edge representation
1. Meshes. D7013E Lecture 14
 D7013E Lecture 14 Quadtrees Mesh Generation 1. Meshes Input: Components in the form of disjoint polygonal objects Integer coordinates, 0, 45, 90, or 135 angles Output: A triangular mesh Conforming: A triangle
D7013E Lecture 14 Quadtrees Mesh Generation 1. Meshes Input: Components in the form of disjoint polygonal objects Integer coordinates, 0, 45, 90, or 135 angles Output: A triangular mesh Conforming: A triangle
MATH 890 HOMEWORK 2 DAVID MEREDITH
 MATH 890 HOMEWORK 2 DAVID MEREDITH (1) Suppose P and Q are polyhedra. Then P Q is a polyhedron. Moreover if P and Q are polytopes then P Q is a polytope. The facets of P Q are either F Q where F is a facet
MATH 890 HOMEWORK 2 DAVID MEREDITH (1) Suppose P and Q are polyhedra. Then P Q is a polyhedron. Moreover if P and Q are polytopes then P Q is a polytope. The facets of P Q are either F Q where F is a facet
Optimal detection of intersections between convex polyhedra
 1 2 Optimal detection of intersections between convex polyhedra Luis Barba Stefan Langerman 3 4 5 6 7 8 9 10 11 12 13 14 15 16 Abstract For a polyhedron P in R d, denote by P its combinatorial complexity,
1 2 Optimal detection of intersections between convex polyhedra Luis Barba Stefan Langerman 3 4 5 6 7 8 9 10 11 12 13 14 15 16 Abstract For a polyhedron P in R d, denote by P its combinatorial complexity,
Approximate Nearest Neighbor Problem: Improving Query Time CS468, 10/9/2006
 Approximate Nearest Neighbor Problem: Improving Query Time CS468, 10/9/2006 Outline Reducing the constant from O ( ɛ d) to O ( ɛ (d 1)/2) in uery time Need to know ɛ ahead of time Preprocessing time and
Approximate Nearest Neighbor Problem: Improving Query Time CS468, 10/9/2006 Outline Reducing the constant from O ( ɛ d) to O ( ɛ (d 1)/2) in uery time Need to know ɛ ahead of time Preprocessing time and
Mesh Basics: Definitions, Topology & Data Structures. Standard Graph Definitions
 Mesh : Definitions, Topology & Data Structures 1 Standard Graph Definitions G = V = vertices = {A,B,C,D,E,F,G,H,I,J,K,L} E = edges = {(A,B),(B,C),(C,D),(D,E),(E,F),(F,G), (G,H),(H,A),(A,J),(A,G),(B,J),(K,F),
Mesh : Definitions, Topology & Data Structures 1 Standard Graph Definitions G = V = vertices = {A,B,C,D,E,F,G,H,I,J,K,L} E = edges = {(A,B),(B,C),(C,D),(D,E),(E,F),(F,G), (G,H),(H,A),(A,J),(A,G),(B,J),(K,F),
Preferred directions for resolving the non-uniqueness of Delaunay triangulations
 Preferred directions for resolving the non-uniqueness of Delaunay triangulations Christopher Dyken and Michael S. Floater Abstract: This note proposes a simple rule to determine a unique triangulation
Preferred directions for resolving the non-uniqueness of Delaunay triangulations Christopher Dyken and Michael S. Floater Abstract: This note proposes a simple rule to determine a unique triangulation
Monotone Paths in Geometric Triangulations
 Monotone Paths in Geometric Triangulations Adrian Dumitrescu Ritankar Mandal Csaba D. Tóth November 19, 2017 Abstract (I) We prove that the (maximum) number of monotone paths in a geometric triangulation
Monotone Paths in Geometric Triangulations Adrian Dumitrescu Ritankar Mandal Csaba D. Tóth November 19, 2017 Abstract (I) We prove that the (maximum) number of monotone paths in a geometric triangulation
Lecture 3: Art Gallery Problems and Polygon Triangulation
 EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
10. Line Arrangements Lecture on Monday 2 nd November, 2009 by Michael Homann
 10. Line Arrangements Lecture on Monday 2 nd November, 2009 by Michael Homann During the course of this lecture we encountered several situations where it was convenient to assume
10. Line Arrangements Lecture on Monday 2 nd November, 2009 by Michael Homann During the course of this lecture we encountered several situations where it was convenient to assume
Tiling Three-Dimensional Space with Simplices. Shankar Krishnan AT&T Labs - Research
 Tiling Three-Dimensional Space with Simplices Shankar Krishnan AT&T Labs - Research What is a Tiling? Partition of an infinite space into pieces having a finite number of distinct shapes usually Euclidean
Tiling Three-Dimensional Space with Simplices Shankar Krishnan AT&T Labs - Research What is a Tiling? Partition of an infinite space into pieces having a finite number of distinct shapes usually Euclidean
Computational Geometry. Geometry Cross Product Convex Hull Problem Sweep Line Algorithm
 GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
Chapter 10 Similarity
 Chapter 10 Similarity Def: The ratio of the number a to the number b is the number. A proportion is an equality between ratios. a, b, c, and d are called the first, second, third, and fourth terms. The
Chapter 10 Similarity Def: The ratio of the number a to the number b is the number. A proportion is an equality between ratios. a, b, c, and d are called the first, second, third, and fourth terms. The
Rubber bands. Chapter Rubber band representation
 Chapter 1 Rubber bands In the previous chapter, we already used the idea of looking at the graph geometrically, by placing its nodes on the line and replacing the edges by rubber bands. Since, however,
Chapter 1 Rubber bands In the previous chapter, we already used the idea of looking at the graph geometrically, by placing its nodes on the line and replacing the edges by rubber bands. Since, however,
Detecting intersections between convex polyhedra
 Detecting intersections between convex polyhedra Luis Barba Stefan Langerman Abstract For a polyhedron P in R d, denote by P its combinatorial complexity, i.e., the number of faces, edges and vertices
Detecting intersections between convex polyhedra Luis Barba Stefan Langerman Abstract For a polyhedron P in R d, denote by P its combinatorial complexity, i.e., the number of faces, edges and vertices