Iterative MAP and ML Estimations for Image Segmentation
|
|
|
- Marilynn Brook Walters
- 6 years ago
- Views:
Transcription
1 Iterative MAP and ML Estimations for Image Segmentation Shifeng Chen 1, Liangliang Cao 2, Jianzhuang Liu 1, and Xiaoou Tang 1,3 1 Dept. of IE, The Chinese University of Hong Kong {sfchen5, jzliu}@ie.cuhk.edu.hk 2 Dept. of ECE, University of Illinois at Urbana-Champaign cao4@uiuc.edu 3 Microsoft Research Asia, Beijing, China xitang@microsoft.com Abstract Image segmentation plays an important role in computer vision and image analysis. In this paper, the segmentation problem is formulated as a labeling problem under a probability maximization framework. To estimate the label configuration, an iterative optimization scheme is proposed to alternately carry out the maximum a posteriori (MAP) estimation and the maximum-likelihood (ML) estimation. The MAP estimation problem is modeled with Markov random fields (MRFs). A graph-cut algorithm is used to find the solution to the MAP-MRF estimation. The ML estimation is achieved by finding the means of region features. Our algorithm can automatically segment an image into regions with relevant textures or colors without the need to know the number of regions in advance. In addition, under the same framework, it can be extended to another algorithm that extracts objects of a particular class from a group of images. Extensive experiments have shown the effectiveness of our approach. 1. Introduction Image segmentation has received extensive attention since the early years of computer vision research. Due to the limitation of computational ability, the early segmentation methods [12], [15] flaw in efficiency and/or performance. Recently, Shi and Malik proposed to apply normalized cuts to image segmentation [13], [16], which is able to capture intuitively salient parts in an image. The normalized cuts has an important advantage in spectral clustering. However, it is not perfectly fit for the nature of image segmentation because ad hoc approximations must be introduced to relax the NP-hard computational problem. These approximations are not well understood and often lead to unsatisfactory results. Expectation-maximization (EM) [4] is another interesting segmentation method. One shortcoming of EM is that the number of regions is kept unchanged during the segmentation, which often causes wrong results because different images usually have different numbers of regions. Theoretically, people can use the minimum description length (MDL) principle [4] to alleviate this problem, but the segmentation has to be carried out many times with different region numbers to find the best result. This takes a large amount of computation, and the theoretically best result may not accord with our perception. Tu and Zhu [14] presented an generative segmentation method under the framework of MAP estimation of MRFs, with the Markov Chain Monte Carlo (MCMC) used to solve the MAP-MRF estimation. This method suffers much from the computation burden. In addition, the generative approach explicitly models regions in images with many constraints, resulting in the difficulty of choosing parameters to express objects in images. Another popular segmentation approach based on MRFs is graph cut algorithms. The algorithms in [2] and [8] rely on human interaction, and solve the two-class segmentation problem. In [17], Zabih and Kolmogorov used graph cuts to obtain the segmentation of multiple regions in an image, but the number of clusters is given in the beginning and cannot be adjusted during the segmentation. Besides, the segmentation result is sensitive to this number, as pointed out by the authors. Recently, some researchers start to pay attention to learning-based segmentation of objects of a particular class from images [9], [1], [10], [11]. Different from common segmentation methods, this work requires to learn the parameters of a model expressing the same objects (say, horse) from a set of images. This paper proposed a new image segmentation algorithm based on a probability maximization model. An iterative optimization scheme alternately making the MAP and ML estimations is the key to the segmentation. We model the MAP estimation with MRFs and solve the MAP-MRF estimation problem using graph cuts. The ML estimation is obtained by finding the means of region features /07/$ IEEE
2 The contributions of this work include: 1) a novel probabilistic model and an iterative optimization scheme for image segmentation; 2) using graph cuts to solve the multiple region segmentation problem with the number of regions automatically adjusted according to the properties of the regions; and 3) extracting objects from a group of images containing the objects of the same class. 2. A New Probabilistic Model For a given image P, the features of every pixel p are expressed by a four-dimensional vector I(p) =(I L (p),i a (p),i b (p),i t (p)) T, (1) where I L (p), I a (p) and I b (p) are the components of p in the L*a*b* color space and I t (p) denotes the texture feature of p. Several classical texture descriptors have been developed in [4], [6], and, [7]. In this paper, the texture contrast defined in [4] (scaled from [0, 1] to [0, 255]) is chosen as the texture descriptor. The task of image segmentation is to group the pixels of the image into relevant regions. If we formulate it as a labeling problem, the objective is then to find a label configuration f = {f p p} where f p is the label of pixel p denoting which region this pixel is grouped into. Suppose that we have k possible region labels. A four-dimensional vector φ(i) =(I L (i), I a (i), I b (i), I t (i)) T (2) is used to describe the properties of label (region) i, where the four components of φ(i) have the similar meanings to those of the corresponding four components of I(p). Let Φ={φ(i)} be the union of the region features. If P and Φ are known, the segmentation is to find an optimal label configuration f, which maximizes the posterior possibility of the label configuration: f =argmaxpr(f Φ,P), (3) f where Φ can be obtained by either a learning process or an initialized estimation. However, due to the existence of noise and diverse objects in different images, it is difficult to obtain Φ that is precise enough. Our strategy here is to refine Φ according to the current label configuration found by (3). Thus, we propose to use an iterative method to solve the segmentation problem. Suppose that Φ n and f n are the estimation results in the nth iteration. Then the iterative formulas for optimization are f n+1 =argmaxpr(f Φ n,p), (4) f Φ n+1 =argmaxpr(f n+1 Φ,P). (5) Φ This iterative optimization is preferred because (4) can be solved by the MAP estimation, and (5) by the ML estimation MAP Estimation of f from Φ Given an image P and the potential region features Φ, Pr(f Φ,P) can be obtained by the Bayesian law: Pr(f Φ,P) Pr(Φ,P f)pr(f), (6) which is a MAP estimation problem and can be modelled using MRFs. Assuming that the observation of the image follows an independent identical distribution (i.i.d.), we define Pr(Φ,P f) exp ( D(p, f p, Φ)), (7) where D(p, f p, Φ) is the data penalty function which imposes the penalty of a pixel p with a label f p for given Φ. The data penalty function is defined as: D(p, f p, Φ) = I(p) φ(f p ) 2. (8) We restrict our attention to MRFs whose clique potentials involve pairs of neighboring pixels. Thus Pr(f) exp ( V p,q (f p,f q )), (9) where N (p) is the neighborhood of pixel p. V p,q (f p,f q ), called the smoothness penalty function, describes the prior probability of a particular label configuration with the elements of the clique (p, q). It is defined using a generalized Potts model [3]: Δ(p, q) V p,q (f p,f q )=c exp ( ) T (f p f q ), (10) σ where Δ(p, q) = I L (p) I L (q) denotes how different the brightnesses of p and q are, c>0is a smoothness factor, σ>0is used to control the contribution of Δ(p, q) to the penalty, and T ( ) is 1 if its argument is true and 0 otherwise. V p,q (f p,f q ) depicts two kinds of constraints. The first enforces the spatial smoothness; if two neighboring pixels are labelled differently, a penalty is imposed. The second considers a possible edge between p and q; if two neighboring pixels cause a larger Δ, then they have greater likelihood to be partitioned into two regions. From (6), (7), and (9), we have Pr(f Φ,P) ( exp ( D(p, f p, Φ))) exp ( V p,q (f p,f q )). (11) Taking the logarithm of (11), we have the energy function: E(f,Φ) = (D(p, f p, Φ) + V p,q (f p,f q )). (12)
3 It includes two parts: the data term E data = D(p, f p, Φ) (13) and the smoothness term E smooth = V p,q (f p,f q ). (14) From (12), we see that maximizing Pr(f Φ,P) is equivalent to minimizing the Markov energy E(f,Φ) for given Φ. In this paper, we use a graph cut algorithm to solve this minimization problem, which is described in Section ML Estimation of Φ from f If the label configuration f is given, the optimal Φ should maximize Pr(f Φ,P), or minimize E(f,Φ) equivalently. Thus we have Φ log Pr(f Φ,P)=0, or Φ E(f,Φ) = 0, (15) where Φ denotes the gradient operator. Since V p,q (f p,f q ) is independent of Φ, we obtain Φ D(p, f p, Φ) = 0, (16) where different formulations of D(p, f p, Φ) lead to different estimations of Φ. For our formulation in (8), it follows that I(p) φ(i) 2. (17) D(p, f p, Φ) = i f p=i From (16) and (17), we obtain the ML estimation Φ=φ(i), where φ(i) = 1 I(p), (18) num i f p=i with num i being the number of pixels within region i. Here (18) is exactly the equation to obtain I L (i), I a (i), I b (i), and I t (i) in (2). Note that when the label configuration f = {f p p} is unknown, finding the solution of (16) is carried out by clustering the pixels into groups. In the case, the ML estimation is achieved by the K-means algorithm [5], which serves as the initialization in the algorithm described in Section The Proposed Algorithm With E(f,Φ) defined in (12), the estimation of f and Φ in (4) and (5) are now transformed to f n+1 =argmine(f,φ n ), (19) f Φ n+1 =argmine(f n+1, Φ). (20) Φ The two equations correspond to the MAP estimation and the ML estimation, respectively. The algorithm to obtain f and Φ is described as Algorithm (a) Figure 1. Relabeling of the regions. (a) The result before the relabeling. (b) The result after the relabeling. Algorithm 1: Our segmentation algorithm. Input: an RGB color image. Step 1: Convert the image into L*a*b* space and calculate the texture contrast. Step 2: Use the K-means algorithm to initialize Φ. Step 3: Iterative optimization. 3.1: MAP estimation Estimate the label configuration f based on current Φ using the graph cut algorithm [3]. 3.2: Relabeling Set a unique label to each connecting region to form a new cluster, obtaining anewf. 3.3: ML estimation Refine Φ based on current f with (18). Step 4: If Φ and f do not change between two successive iterations or the maximum number of iterations is reached, go to the output step; otherwise, go to step 3. Output: Multiple segmented regions. We explain step 3.2 in more details here. After step 3.1, it is possible that two non-adjacent regions are given the same label (see Fig. 1(a)). After step 3.2, each of the connected regions has a unique label (see Fig. 1(b)). One remarkable feature of our algorithm is the ability to adjust the region number automatically during the iterative optimization by the relabeling step. Fig. 2 gives an example to show how the iterations improve the segmentation results. Comparing Figs. 2(b), (c), and (d), we can see that the final result is the best. 4. Object Extraction from a Group of Images The framework proposed in Section 2 can be extended from single image segmentation to object extraction from a group of images. These images contain objects of the same class with similar colors and textures. The purpose of the specific algorithm developed next is not to segment an image into multiple regions, but to extract interested objects from a group of images containing these similar objects. Unlike the learning-based segmentation of a particular class of objects [9], [1], [10], [11], our algorithm does not need to learn a deformable shape model representing the objects. Instead, we assume that one pixel is known which is inside an interested object in one (only one) image of the group. In our current experiments, this pixel is provided by the user 3 (b) 4
 The converged result after 4 iterations with K changed to 6. clicking once at the object.")

4 (a) (c) Figure 2. A segmentation example. (a) An original image. (b) The result of initial K-means clustering with K =10. (c) The result of the first iteration with K adjusted to 8. (d) The converged result after 4 iterations with K changed to 6. clicking once at the object. Given a group of N images containing a class of objects and the known pixels position, our algorithm estimates the features of the interested objects in the group and combines the estimated features into the same framework of the ML and MAP estimations to extract the objects from the images. To estimate the features of the interested objects, we model them as a Gaussian distribution with a mean vector φ and a variance matrix Σ. Using Algorithm 1, we can segment each image into n k regions, 1 k N. Inevery image, the features of each region are represented by φ k (i), 1 i n k. Now we need to estimate φ and Σ from the images. We use an iterative ML estimation to find the Gaussian model of the objects (φ, Σ). At first, we initialize φ as the features of the region R containing the known pixel in the image, and set Σ as an identity matrix. Then the algorithm selects one region that is most similar to R from each image. These selected regions are used to perform the ML estimation of φ and Σ. The two iterative steps for the estimation are described as follows: Step 1: For each image k, φ k =argmaxpr(φ k (i) φ, Σ), (21) φ k (i) where Pr(φ k (i) φ, Σ) 1 Σ exp ( 1 1/2 2 (φ k (i) φ ) T Σ 1 (φ k (i) φ )). Step 2: (φ, Σ) = arg max Pr(φ k φ, Σ). (22) φ,σ k After φ is found, we set the object feature vector φ O = φ. On the other hand, for each image, m B regions feature vectors (called the background feature vectors) which are farthest from φ areusedtoformasetφ B. Extracting an (b) (d) object out of an image k is to set a binary value f p =0or 1 to each pixel p in image k, where f p =0 (or 1) denotes pixel p belongs to the background (or object). This task may be thought of as a two-class segmentation problem that can be solved using the MAP-ML estimation presented in Section 3. Here, we define a new data penalty function D(p, f p =1)= I(p) φ O 2, (23) D(p, f p =0)=argmin I(p) φ B 2. (24) φ B φ B When φ O is known, we can obtain f by the MAP estimation via graph cuts to minimize E(f,φ O )= D(p, f p )+ V p,q (f p,f q ), (25) where D(p, f p ) is defined in (23) and (24). Since the initialized φ O is generally a rough estimation, it is necessary to update it with the ML estimation, as described in Section 3. Then this MAP-ML estimation is repeated again until it converges. The summary of the algorithm for object extraction from one group of images is described in Algorithm 2. Algorithm 2: Object extraction from a group of images. Input: N images containing the same class of objects. Step 1: Click the object in one arbitrary image, and record the clicked pixel as p 0. Step 2: Segment each image into n k regions using Algorithm 1, 1 k N. Step 3: Learn the object features φ and Σ using (21) and (22) with a general ML estimation algorithm with the initial φ from the region containing p 0 and the identity matrix Σ. Step 4: Extract the objects from each image: 4.1: Initialization Set φ O to φ. 4.2: MAP estimation Perform the MAP estimation of the label configuration f via graph cuts. 4.3: ML estimation Refine φ O based on current f with (18). Step 5: Perform Steps 4.2 and 4.3 iteratively until E converges or the maximum iteration number is reached. Output: The extracted objects from the images. 5. Experimental Results We test the proposed Algorithm 1 with a large set of natural images and compare the results with those obtained by the normalized cuts [13] and the blobworld [4]. The normalized cuts is a popular segmentation algorithm, and the blobworld is recently published using the EM framework. In our algorithm, we set the initial cluster number in the K- means algorithm to 10. The region number in the normalized cuts is set to 10. The cluster number in the blobworld



![choose the best one, which is suggested in [4].](/docs-images/74/71074775/images/5-3.jpg "Some of the experimental results are shown in Fig.")

















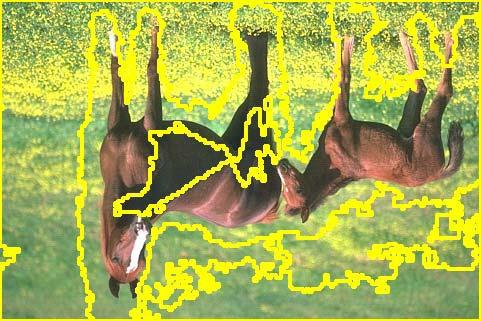



5 Our Algorithm Normalized Cut Blobworld Figure 3. Results obtained by the three algorithms for single image segmentation. The boundaries of the segmentation results are marked using yellow curves. is initialized as 3, 4, and 5, and then the MDL is used to choose the best one, which is suggested in [4]. Some of the experimental results are shown in Fig. 3, from which we can see that our algorithm outperforms the other two. First, the found edges in our results match the real edges much better. The normalized cut algorithm tends to partition an image into large regions, making the boundaries apart from the real edges. On the other hand, since the blobworld integrates no edge information, the boundaries of its results are far from satisfactory with too many rough and trivial edges. Second, our algorithm can adapt the region number to different images automatically although all the initial region numbers set for the K-means algorithm are 10. To test our Algorithm 2, we try three groups of images, bulls, horses, and zebras, in the experiment. The results are given in Fig. 4. Each group has 8 images. The size and posture of these animals vary significantly, and their legs in some images are occluded by the grasses. Our algorithm is able to extract them under these nontrivial conditions. Note that we need neither a large set of images for training nor predefined templates in order to extract the objects. 6. Conclusions In this paper, we have developed two novel algorithms under the same framework. Algorithm 1 is for single image segmentation and Algorithm 2 for object extraction from a group of images. Our algorithms are formulated as a labeling problem using a probability maximization model. An iterative optimization technique combining the MAP-MRFs and ML estimations is employed in our framework. The MAP-MRFs problem is solved using graph cuts and the ML estimation is obtained by finding the means of the region features. We have compared our Algorithm 1 with the normalized cuts and the blobworld. The experimental results show that our algorithm outperforms the other two. One of our future works aims to generalize the extraction of objects with homogeneous region features to the extraction of objects composed of two or more regions with different features, such as humans and cars. One possible way is to design complex models to describe the region features of the objects, and consider the image context for the object extraction. Acknowledgement This work was supported by the Research Grants Council of the Hong Kong SAR (Project No. CUHK ) and the CUHK Direct Grant. References [1] E. Borenstein and S. Ullman. Learning to segment. In ECCV, , 3 [2] Y. Boykov and M. Jolly. Interactive graph cuts for optimal boundary and region segmentation of objects in N-D images. In ICCV, [3] Y. Boykov, O. Veksler, and R. Zabih. Fast approximate energy minimization via graph cuts. IEEE Trans. PAMI, 23(11): , , 3 [4] C. Carson, S. Belongie, H. Greenspan, and J. Malik. Blobworld: Image segmentation using expectation-maximization








:1026")




![3 [6] W. Förstner.](/docs-images/74/71074775/images/6-15.jpg "A framework for low")




























6 Figure 4. Results of our algorithm for the extraction of objects from two groups of images. The first, third, and fifth column include 8 bull images, horse images and zebra images respectively. The second, fourth, and sixth column are the extracted animals. and its application to image querying. IEEE Trans. PAMI, 24(8): , , 2, 4, 5 [5] R. Duda, P. Hart, and D. Stork. Pattern Classification. Wiley- Interscience, 2 edition, [6] W. Förstner. A framework for low level feature extraction. In ECCV, [7] J. Gårding and T. Lindeberg. Direct computation of shape cues using scale-adapted spatial derivative operators. IJCV, 17(2): , [8] V. Kolmogorov and R. Zabih. What energy functions can be minimized via graph cuts? IEEE Trans. PAMI, 26(2): , [9] M. P. Kumar, P. H. S. Torr, and A. Zisserman. Obj cut. CVPR, , 3 [10] A. Opelt, A. Pinz, and A. Zisserman. A boundary-fragmentmodel for object detection. In ECCV, , 3 [11] A. Opelt, A. Pinz, and A. Zisserman. Incremental learning of object detectors using a visual shape alphabet. In ICCV, , 3 [12] T. Pappas. An adaptive clustering algorithm for image segmentation. IEEE Trans. Signal Processing, 40(4): , [13] J. Shi and J. Malik. Normalized cuts and image segmentation. IEEE Trans. PAMI, 22(8): , , 4 [14] Z. Tu and S.-C. Zhu. Image segmentation by data-driven markov chain monte carlo. IEEE Trans. PAMI, 24(5): , [15] L. Vincent and P. Soille. Watersheds in digital spaces: An efficient algorithm based on immersion simulations. IEEE Trans. PAMI, 13(6): , [16] S. X. Yu and J. Shi. Multiclass spectral clustering. In ICCV, [17] R. Zabih and V. Kolmogorov. Spatially coherent clustering using graph cuts. In CVPR,
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing
 Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200,
Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200,
Image Segmentation Using Iterated Graph Cuts BasedonMulti-scaleSmoothing
 Image Segmentation Using Iterated Graph Cuts BasedonMulti-scaleSmoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai,
Image Segmentation Using Iterated Graph Cuts BasedonMulti-scaleSmoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai,
Graph Based Image Segmentation
 AUTOMATYKA 2011 Tom 15 Zeszyt 3 Anna Fabijañska* Graph Based Image Segmentation 1. Introduction Image segmentation is one of the fundamental problems in machine vision. In general it aims at extracting
AUTOMATYKA 2011 Tom 15 Zeszyt 3 Anna Fabijañska* Graph Based Image Segmentation 1. Introduction Image segmentation is one of the fundamental problems in machine vision. In general it aims at extracting
Energy Minimization for Segmentation in Computer Vision
 S * = arg S min E(S) Energy Minimization for Segmentation in Computer Vision Meng Tang, Dmitrii Marin, Ismail Ben Ayed, Yuri Boykov Outline Clustering/segmentation methods K-means, GrabCut, Normalized
S * = arg S min E(S) Energy Minimization for Segmentation in Computer Vision Meng Tang, Dmitrii Marin, Ismail Ben Ayed, Yuri Boykov Outline Clustering/segmentation methods K-means, GrabCut, Normalized
The goals of segmentation
 Image segmentation The goals of segmentation Group together similar-looking pixels for efficiency of further processing Bottom-up process Unsupervised superpixels X. Ren and J. Malik. Learning a classification
Image segmentation The goals of segmentation Group together similar-looking pixels for efficiency of further processing Bottom-up process Unsupervised superpixels X. Ren and J. Malik. Learning a classification
Smooth Image Segmentation by Nonparametric Bayesian Inference
 Smooth Image Segmentation by Nonparametric Bayesian Inference Peter Orbanz and Joachim M. Buhmann Institute of Computational Science, ETH Zurich European Conference on Computer Vision (ECCV), 2006 The
Smooth Image Segmentation by Nonparametric Bayesian Inference Peter Orbanz and Joachim M. Buhmann Institute of Computational Science, ETH Zurich European Conference on Computer Vision (ECCV), 2006 The
Saliency Cut in Stereo Images
 2013 IEEE International Conference on Computer Vision Workshops Saliency Cut in Stereo Images Jianteng Peng, Jianbing Shen, Yunde Jia Beijing Laboratory of Intelligent Information Technology, School of
2013 IEEE International Conference on Computer Vision Workshops Saliency Cut in Stereo Images Jianteng Peng, Jianbing Shen, Yunde Jia Beijing Laboratory of Intelligent Information Technology, School of
Combining Local and Global Features for Image Segmentation Using Iterative Classification and Region Merging
 Combining Local and Global Features for Image Segmentation Using Iterative Classification and Region Merging Qiyao Yu, David A. Clausi Systems Design Engineering, University of Waterloo Waterloo, ON, Canada
Combining Local and Global Features for Image Segmentation Using Iterative Classification and Region Merging Qiyao Yu, David A. Clausi Systems Design Engineering, University of Waterloo Waterloo, ON, Canada
Markov/Conditional Random Fields, Graph Cut, and applications in Computer Vision
 Markov/Conditional Random Fields, Graph Cut, and applications in Computer Vision Fuxin Li Slides and materials from Le Song, Tucker Hermans, Pawan Kumar, Carsten Rother, Peter Orchard, and others Recap:
Markov/Conditional Random Fields, Graph Cut, and applications in Computer Vision Fuxin Li Slides and materials from Le Song, Tucker Hermans, Pawan Kumar, Carsten Rother, Peter Orchard, and others Recap:
UNSUPERVISED CO-SEGMENTATION BASED ON A NEW GLOBAL GMM CONSTRAINT IN MRF. Hongkai Yu, Min Xian, and Xiaojun Qi
 UNSUPERVISED CO-SEGMENTATION BASED ON A NEW GLOBAL GMM CONSTRAINT IN MRF Hongkai Yu, Min Xian, and Xiaojun Qi Department of Computer Science, Utah State University, Logan, UT 84322-4205 hongkai.yu@aggiemail.usu.edu,
UNSUPERVISED CO-SEGMENTATION BASED ON A NEW GLOBAL GMM CONSTRAINT IN MRF Hongkai Yu, Min Xian, and Xiaojun Qi Department of Computer Science, Utah State University, Logan, UT 84322-4205 hongkai.yu@aggiemail.usu.edu,
Image Restoration using Markov Random Fields
 Image Restoration using Markov Random Fields Based on the paper Stochastic Relaxation, Gibbs Distributions and Bayesian Restoration of Images, PAMI, 1984, Geman and Geman. and the book Markov Random Field
Image Restoration using Markov Random Fields Based on the paper Stochastic Relaxation, Gibbs Distributions and Bayesian Restoration of Images, PAMI, 1984, Geman and Geman. and the book Markov Random Field
Robust Shape Retrieval Using Maximum Likelihood Theory
 Robust Shape Retrieval Using Maximum Likelihood Theory Naif Alajlan 1, Paul Fieguth 2, and Mohamed Kamel 1 1 PAMI Lab, E & CE Dept., UW, Waterloo, ON, N2L 3G1, Canada. naif, mkamel@pami.uwaterloo.ca 2
Robust Shape Retrieval Using Maximum Likelihood Theory Naif Alajlan 1, Paul Fieguth 2, and Mohamed Kamel 1 1 PAMI Lab, E & CE Dept., UW, Waterloo, ON, N2L 3G1, Canada. naif, mkamel@pami.uwaterloo.ca 2
Human Head-Shoulder Segmentation
 Human Head-Shoulder Segmentation Hai Xin, Haizhou Ai Computer Science and Technology Tsinghua University Beijing, China ahz@mail.tsinghua.edu.cn Hui Chao, Daniel Tretter Hewlett-Packard Labs 1501 Page
Human Head-Shoulder Segmentation Hai Xin, Haizhou Ai Computer Science and Technology Tsinghua University Beijing, China ahz@mail.tsinghua.edu.cn Hui Chao, Daniel Tretter Hewlett-Packard Labs 1501 Page
Texture. Texture is a description of the spatial arrangement of color or intensities in an image or a selected region of an image.
 Texture Texture is a description of the spatial arrangement of color or intensities in an image or a selected region of an image. Structural approach: a set of texels in some regular or repeated pattern
Texture Texture is a description of the spatial arrangement of color or intensities in an image or a selected region of an image. Structural approach: a set of texels in some regular or repeated pattern
Image Segmentation using Gaussian Mixture Models
 Image Segmentation using Gaussian Mixture Models Rahman Farnoosh, Gholamhossein Yari and Behnam Zarpak Department of Applied Mathematics, University of Science and Technology, 16844, Narmak,Tehran, Iran
Image Segmentation using Gaussian Mixture Models Rahman Farnoosh, Gholamhossein Yari and Behnam Zarpak Department of Applied Mathematics, University of Science and Technology, 16844, Narmak,Tehran, Iran
CRFs for Image Classification
 CRFs for Image Classification Devi Parikh and Dhruv Batra Carnegie Mellon University Pittsburgh, PA 15213 {dparikh,dbatra}@ece.cmu.edu Abstract We use Conditional Random Fields (CRFs) to classify regions
CRFs for Image Classification Devi Parikh and Dhruv Batra Carnegie Mellon University Pittsburgh, PA 15213 {dparikh,dbatra}@ece.cmu.edu Abstract We use Conditional Random Fields (CRFs) to classify regions
A Feature Point Matching Based Approach for Video Objects Segmentation
 A Feature Point Matching Based Approach for Video Objects Segmentation Yan Zhang, Zhong Zhou, Wei Wu State Key Laboratory of Virtual Reality Technology and Systems, Beijing, P.R. China School of Computer
A Feature Point Matching Based Approach for Video Objects Segmentation Yan Zhang, Zhong Zhou, Wei Wu State Key Laboratory of Virtual Reality Technology and Systems, Beijing, P.R. China School of Computer
MRFs and Segmentation with Graph Cuts
 02/24/10 MRFs and Segmentation with Graph Cuts Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class Finish up EM MRFs w ij i Segmentation with Graph Cuts j EM Algorithm: Recap
02/24/10 MRFs and Segmentation with Graph Cuts Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class Finish up EM MRFs w ij i Segmentation with Graph Cuts j EM Algorithm: Recap
Outline. Segmentation & Grouping. Examples of grouping in vision. Grouping in vision. Grouping in vision 2/9/2011. CS 376 Lecture 7 Segmentation 1
 Outline What are grouping problems in vision? Segmentation & Grouping Wed, Feb 9 Prof. UT-Austin Inspiration from human perception Gestalt properties Bottom-up segmentation via clustering Algorithms: Mode
Outline What are grouping problems in vision? Segmentation & Grouping Wed, Feb 9 Prof. UT-Austin Inspiration from human perception Gestalt properties Bottom-up segmentation via clustering Algorithms: Mode
Integrating Intensity and Texture in Markov Random Fields Segmentation. Amer Dawoud and Anton Netchaev. {amer.dawoud*,
 Integrating Intensity and Texture in Markov Random Fields Segmentation Amer Dawoud and Anton Netchaev {amer.dawoud*, anton.netchaev}@usm.edu School of Computing, University of Southern Mississippi 118
Integrating Intensity and Texture in Markov Random Fields Segmentation Amer Dawoud and Anton Netchaev {amer.dawoud*, anton.netchaev}@usm.edu School of Computing, University of Southern Mississippi 118
Markov Random Fields and Segmentation with Graph Cuts
 Markov Random Fields and Segmentation with Graph Cuts Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project Proposal due Oct 27 (Thursday) HW 4 is out
Markov Random Fields and Segmentation with Graph Cuts Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project Proposal due Oct 27 (Thursday) HW 4 is out
IMPROVED FINE STRUCTURE MODELING VIA GUIDED STOCHASTIC CLIQUE FORMATION IN FULLY CONNECTED CONDITIONAL RANDOM FIELDS
 IMPROVED FINE STRUCTURE MODELING VIA GUIDED STOCHASTIC CLIQUE FORMATION IN FULLY CONNECTED CONDITIONAL RANDOM FIELDS M. J. Shafiee, A. G. Chung, A. Wong, and P. Fieguth Vision & Image Processing Lab, Systems
IMPROVED FINE STRUCTURE MODELING VIA GUIDED STOCHASTIC CLIQUE FORMATION IN FULLY CONNECTED CONDITIONAL RANDOM FIELDS M. J. Shafiee, A. G. Chung, A. Wong, and P. Fieguth Vision & Image Processing Lab, Systems
Norbert Schuff VA Medical Center and UCSF
 Norbert Schuff Medical Center and UCSF Norbert.schuff@ucsf.edu Medical Imaging Informatics N.Schuff Course # 170.03 Slide 1/67 Objective Learn the principle segmentation techniques Understand the role
Norbert Schuff Medical Center and UCSF Norbert.schuff@ucsf.edu Medical Imaging Informatics N.Schuff Course # 170.03 Slide 1/67 Objective Learn the principle segmentation techniques Understand the role
intro, applications MRF, labeling... how it can be computed at all? Applications in segmentation: GraphCut, GrabCut, demos
 Image as Markov Random Field and Applications 1 Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Talk Outline Last update:
Image as Markov Random Field and Applications 1 Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Talk Outline Last update:
Transductive Object Cutout
 Transductive Object Cutout Jingyu Cui 1, Qiong Yang 3, Fang Wen 2, Qiying Wu 4, Changshui Zhang 1, Luc Van Gool 3, and Xiaoou Tang 2 1 Tsinghua University, Beijing, China cui-jy@mails.thu.edu.cn, zcs@mail.thu.edu.cn
Transductive Object Cutout Jingyu Cui 1, Qiong Yang 3, Fang Wen 2, Qiying Wu 4, Changshui Zhang 1, Luc Van Gool 3, and Xiaoou Tang 2 1 Tsinghua University, Beijing, China cui-jy@mails.thu.edu.cn, zcs@mail.thu.edu.cn
Super Resolution Using Graph-cut
 Super Resolution Using Graph-cut Uma Mudenagudi, Ram Singla, Prem Kalra, and Subhashis Banerjee Department of Computer Science and Engineering Indian Institute of Technology Delhi Hauz Khas, New Delhi,
Super Resolution Using Graph-cut Uma Mudenagudi, Ram Singla, Prem Kalra, and Subhashis Banerjee Department of Computer Science and Engineering Indian Institute of Technology Delhi Hauz Khas, New Delhi,
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CAP5415-Computer Vision Lecture 13-Image/Video Segmentation Part II. Dr. Ulas Bagci
 CAP-Computer Vision Lecture -Image/Video Segmentation Part II Dr. Ulas Bagci bagci@ucf.edu Labeling & Segmentation Labeling is a common way for modeling various computer vision problems (e.g. optical flow,
CAP-Computer Vision Lecture -Image/Video Segmentation Part II Dr. Ulas Bagci bagci@ucf.edu Labeling & Segmentation Labeling is a common way for modeling various computer vision problems (e.g. optical flow,
Segmentation with non-linear constraints on appearance, complexity, and geometry
 IPAM February 2013 Western Univesity Segmentation with non-linear constraints on appearance, complexity, and geometry Yuri Boykov Andrew Delong Lena Gorelick Hossam Isack Anton Osokin Frank Schmidt Olga
IPAM February 2013 Western Univesity Segmentation with non-linear constraints on appearance, complexity, and geometry Yuri Boykov Andrew Delong Lena Gorelick Hossam Isack Anton Osokin Frank Schmidt Olga
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu. Lectures 21 & 22 Segmentation and clustering
 Ifeoma Nwogu. Lectures 21 & 22 Segmentation and clustering") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu Lectures 21 & 22 Segmentation and clustering 1 Schedule Last class We started on segmentation Today Segmentation continued Readings
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu Lectures 21 & 22 Segmentation and clustering 1 Schedule Last class We started on segmentation Today Segmentation continued Readings
Color Image Segmentation
 Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
Segmentation and Grouping April 19 th, 2018
 Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
GRAPH BASED SEGMENTATION WITH MINIMAL USER INTERACTION. Huaizhong Zhang, Ehab Essa, and Xianghua Xie
 GRAPH BASED SEGMENTATION WITH MINIMAL USER INTERACTION Huaizhong Zhang, Ehab Essa, and Xianghua Xie Computer Science Department, Swansea University, Swansea SA2 8PP, United Kingdom *http://csvision.swan.ac.uk/
GRAPH BASED SEGMENTATION WITH MINIMAL USER INTERACTION Huaizhong Zhang, Ehab Essa, and Xianghua Xie Computer Science Department, Swansea University, Swansea SA2 8PP, United Kingdom *http://csvision.swan.ac.uk/
Mesh segmentation. Florent Lafarge Inria Sophia Antipolis - Mediterranee
 Mesh segmentation Florent Lafarge Inria Sophia Antipolis - Mediterranee Outline What is mesh segmentation? M = {V,E,F} is a mesh S is either V, E or F (usually F) A Segmentation is a set of sub-meshes
Mesh segmentation Florent Lafarge Inria Sophia Antipolis - Mediterranee Outline What is mesh segmentation? M = {V,E,F} is a mesh S is either V, E or F (usually F) A Segmentation is a set of sub-meshes
Beyond Mere Pixels: How Can Computers Interpret and Compare Digital Images? Nicholas R. Howe Cornell University
 Beyond Mere Pixels: How Can Computers Interpret and Compare Digital Images? Nicholas R. Howe Cornell University Why Image Retrieval? World Wide Web: Millions of hosts Billions of images Growth of video
Beyond Mere Pixels: How Can Computers Interpret and Compare Digital Images? Nicholas R. Howe Cornell University Why Image Retrieval? World Wide Web: Millions of hosts Billions of images Growth of video
Multi-Label Moves for Multi-Label Energies
 Multi-Label Moves for Multi-Label Energies Olga Veksler University of Western Ontario some work is joint with Olivier Juan, Xiaoqing Liu, Yu Liu Outline Review multi-label optimization with graph cuts
Multi-Label Moves for Multi-Label Energies Olga Veksler University of Western Ontario some work is joint with Olivier Juan, Xiaoqing Liu, Yu Liu Outline Review multi-label optimization with graph cuts
Image Segmentation continued Graph Based Methods. Some slides: courtesy of O. Capms, Penn State, J.Ponce and D. Fortsyth, Computer Vision Book
 Image Segmentation continued Graph Based Methods Some slides: courtesy of O. Capms, Penn State, J.Ponce and D. Fortsyth, Computer Vision Book Previously Binary segmentation Segmentation by thresholding
Image Segmentation continued Graph Based Methods Some slides: courtesy of O. Capms, Penn State, J.Ponce and D. Fortsyth, Computer Vision Book Previously Binary segmentation Segmentation by thresholding
Content-based Image and Video Retrieval. Image Segmentation
 Content-based Image and Video Retrieval Vorlesung, SS 2011 Image Segmentation 2.5.2011 / 9.5.2011 Image Segmentation One of the key problem in computer vision Identification of homogenous region in the
Content-based Image and Video Retrieval Vorlesung, SS 2011 Image Segmentation 2.5.2011 / 9.5.2011 Image Segmentation One of the key problem in computer vision Identification of homogenous region in the
A Hierarchical Compositional System for Rapid Object Detection
 A Hierarchical Compositional System for Rapid Object Detection Long Zhu and Alan Yuille Department of Statistics University of California at Los Angeles Los Angeles, CA 90095 {lzhu,yuille}@stat.ucla.edu
A Hierarchical Compositional System for Rapid Object Detection Long Zhu and Alan Yuille Department of Statistics University of California at Los Angeles Los Angeles, CA 90095 {lzhu,yuille}@stat.ucla.edu
Grouping and Segmentation
 Grouping and Segmentation CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Kristen Grauman ) Goals: Grouping in vision Gather features that belong together Obtain an intermediate representation
Grouping and Segmentation CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Kristen Grauman ) Goals: Grouping in vision Gather features that belong together Obtain an intermediate representation
Discrete Optimization Methods in Computer Vision CSE 6389 Slides by: Boykov Modified and Presented by: Mostafa Parchami Basic overview of graph cuts
 Discrete Optimization Methods in Computer Vision CSE 6389 Slides by: Boykov Modified and Presented by: Mostafa Parchami Basic overview of graph cuts [Yuri Boykov, Olga Veksler, Ramin Zabih, Fast Approximation
Discrete Optimization Methods in Computer Vision CSE 6389 Slides by: Boykov Modified and Presented by: Mostafa Parchami Basic overview of graph cuts [Yuri Boykov, Olga Veksler, Ramin Zabih, Fast Approximation
People Tracking and Segmentation Using Efficient Shape Sequences Matching
 People Tracking and Segmentation Using Efficient Shape Sequences Matching Junqiu Wang, Yasushi Yagi, and Yasushi Makihara The Institute of Scientific and Industrial Research, Osaka University 8-1 Mihogaoka,
People Tracking and Segmentation Using Efficient Shape Sequences Matching Junqiu Wang, Yasushi Yagi, and Yasushi Makihara The Institute of Scientific and Industrial Research, Osaka University 8-1 Mihogaoka,
Semantic Segmentation. Zhongang Qi
 Semantic Segmentation Zhongang Qi qiz@oregonstate.edu Semantic Segmentation "Two men riding on a bike in front of a building on the road. And there is a car." Idea: recognizing, understanding what's in
Semantic Segmentation Zhongang Qi qiz@oregonstate.edu Semantic Segmentation "Two men riding on a bike in front of a building on the road. And there is a car." Idea: recognizing, understanding what's in
Learning CRFs using Graph Cuts
 Appears in European Conference on Computer Vision (ECCV) 2008 Learning CRFs using Graph Cuts Martin Szummer 1, Pushmeet Kohli 1, and Derek Hoiem 2 1 Microsoft Research, Cambridge CB3 0FB, United Kingdom
Appears in European Conference on Computer Vision (ECCV) 2008 Learning CRFs using Graph Cuts Martin Szummer 1, Pushmeet Kohli 1, and Derek Hoiem 2 1 Microsoft Research, Cambridge CB3 0FB, United Kingdom
A Combined Method with automatic parameter optimization for Multi-class Image Semantic Segmentation
 A Combined Method with automatic parameter optimization for Multi-class Image Semantic Segmentation S.Suganya J.Nivedha S.Pavithra R.K.Ramiya Asst.prof/IT, Dept of IT, Dept of IT, Dept of IT, SREC,Coimbatore,
A Combined Method with automatic parameter optimization for Multi-class Image Semantic Segmentation S.Suganya J.Nivedha S.Pavithra R.K.Ramiya Asst.prof/IT, Dept of IT, Dept of IT, Dept of IT, SREC,Coimbatore,
Norbert Schuff Professor of Radiology VA Medical Center and UCSF
 Norbert Schuff Professor of Radiology Medical Center and UCSF Norbert.schuff@ucsf.edu 2010, N.Schuff Slide 1/67 Overview Definitions Role of Segmentation Segmentation methods Intensity based Shape based
Norbert Schuff Professor of Radiology Medical Center and UCSF Norbert.schuff@ucsf.edu 2010, N.Schuff Slide 1/67 Overview Definitions Role of Segmentation Segmentation methods Intensity based Shape based
Color Image Segmentation Using a Spatial K-Means Clustering Algorithm
 Color Image Segmentation Using a Spatial K-Means Clustering Algorithm Dana Elena Ilea and Paul F. Whelan Vision Systems Group School of Electronic Engineering Dublin City University Dublin 9, Ireland danailea@eeng.dcu.ie
Color Image Segmentation Using a Spatial K-Means Clustering Algorithm Dana Elena Ilea and Paul F. Whelan Vision Systems Group School of Electronic Engineering Dublin City University Dublin 9, Ireland danailea@eeng.dcu.ie
Markov Networks in Computer Vision
 Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Convexization in Markov Chain Monte Carlo
 in Markov Chain Monte Carlo 1 IBM T. J. Watson Yorktown Heights, NY 2 Department of Aerospace Engineering Technion, Israel August 23, 2011 Problem Statement MCMC processes in general are governed by non
in Markov Chain Monte Carlo 1 IBM T. J. Watson Yorktown Heights, NY 2 Department of Aerospace Engineering Technion, Israel August 23, 2011 Problem Statement MCMC processes in general are governed by non
Segmentation and Grouping
 CS 1699: Intro to Computer Vision Segmentation and Grouping Prof. Adriana Kovashka University of Pittsburgh September 24, 2015 Goals: Grouping in vision Gather features that belong together Obtain an intermediate
CS 1699: Intro to Computer Vision Segmentation and Grouping Prof. Adriana Kovashka University of Pittsburgh September 24, 2015 Goals: Grouping in vision Gather features that belong together Obtain an intermediate
Image Segmentation continued Graph Based Methods
 Image Segmentation continued Graph Based Methods Previously Images as graphs Fully-connected graph node (vertex) for every pixel link between every pair of pixels, p,q affinity weight w pq for each link
Image Segmentation continued Graph Based Methods Previously Images as graphs Fully-connected graph node (vertex) for every pixel link between every pair of pixels, p,q affinity weight w pq for each link
Markov Networks in Computer Vision. Sargur Srihari
 Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Segmentation and Grouping April 21 st, 2015
 Segmentation and Grouping April 21 st, 2015 Yong Jae Lee UC Davis Announcements PS0 grades are up on SmartSite Please put name on answer sheet 2 Features and filters Transforming and describing images;
Segmentation and Grouping April 21 st, 2015 Yong Jae Lee UC Davis Announcements PS0 grades are up on SmartSite Please put name on answer sheet 2 Features and filters Transforming and describing images;
Supplementary Material: Adaptive and Move Making Auxiliary Cuts for Binary Pairwise Energies
 Supplementary Material: Adaptive and Move Making Auxiliary Cuts for Binary Pairwise Energies Lena Gorelick Yuri Boykov Olga Veksler Computer Science Department University of Western Ontario Abstract Below
Supplementary Material: Adaptive and Move Making Auxiliary Cuts for Binary Pairwise Energies Lena Gorelick Yuri Boykov Olga Veksler Computer Science Department University of Western Ontario Abstract Below
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
Translation Symmetry Detection: A Repetitive Pattern Analysis Approach
 2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
Computer Vision : Exercise 4 Labelling Problems
 Computer Vision Exercise 4 Labelling Problems 13/01/2014 Computer Vision : Exercise 4 Labelling Problems Outline 1. Energy Minimization (example segmentation) 2. Iterated Conditional Modes 3. Dynamic Programming
Computer Vision Exercise 4 Labelling Problems 13/01/2014 Computer Vision : Exercise 4 Labelling Problems Outline 1. Energy Minimization (example segmentation) 2. Iterated Conditional Modes 3. Dynamic Programming
Segmentation. Bottom up Segmentation Semantic Segmentation
 Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Bipartite Graph Partitioning and Content-based Image Clustering
 Bipartite Graph Partitioning and Content-based Image Clustering Guoping Qiu School of Computer Science The University of Nottingham qiu @ cs.nott.ac.uk Abstract This paper presents a method to model the
Bipartite Graph Partitioning and Content-based Image Clustering Guoping Qiu School of Computer Science The University of Nottingham qiu @ cs.nott.ac.uk Abstract This paper presents a method to model the
Multiscale Random Fields with Application to Contour Grouping
 Multiscale Random Fields with Application to Contour Grouping Longin Jan Latecki Dept. of Computer and Info. Sciences Temple University, Philadelphia, USA latecki@temple.edu Marc Sobel Statistics Dept.
Multiscale Random Fields with Application to Contour Grouping Longin Jan Latecki Dept. of Computer and Info. Sciences Temple University, Philadelphia, USA latecki@temple.edu Marc Sobel Statistics Dept.
Regularization and Markov Random Fields (MRF) CS 664 Spring 2008
 CS 664 Spring 2008") Regularization and Markov Random Fields (MRF) CS 664 Spring 2008 Regularization in Low Level Vision Low level vision problems concerned with estimating some quantity at each pixel Visual motion (u(x,y),v(x,y))
Regularization and Markov Random Fields (MRF) CS 664 Spring 2008 Regularization in Low Level Vision Low level vision problems concerned with estimating some quantity at each pixel Visual motion (u(x,y),v(x,y))
Object of interest discovery in video sequences
 Object of interest discovery in video sequences A Design Project Report Presented to Engineering Division of the Graduate School Of Cornell University In Partial Fulfillment of the Requirements for the
Object of interest discovery in video sequences A Design Project Report Presented to Engineering Division of the Graduate School Of Cornell University In Partial Fulfillment of the Requirements for the
Markov Random Fields for Recognizing Textures modeled by Feature Vectors
 Markov Random Fields for Recognizing Textures modeled by Feature Vectors Juliette Blanchet, Florence Forbes, and Cordelia Schmid Inria Rhône-Alpes, 655 avenue de l Europe, Montbonnot, 38334 Saint Ismier
Markov Random Fields for Recognizing Textures modeled by Feature Vectors Juliette Blanchet, Florence Forbes, and Cordelia Schmid Inria Rhône-Alpes, 655 avenue de l Europe, Montbonnot, 38334 Saint Ismier
Moving Object Segmentation Method Based on Motion Information Classification by X-means and Spatial Region Segmentation
 IJCSNS International Journal of Computer Science and Network Security, VOL.13 No.11, November 2013 1 Moving Object Segmentation Method Based on Motion Information Classification by X-means and Spatial
IJCSNS International Journal of Computer Science and Network Security, VOL.13 No.11, November 2013 1 Moving Object Segmentation Method Based on Motion Information Classification by X-means and Spatial
Object Recognition Using Pictorial Structures. Daniel Huttenlocher Computer Science Department. In This Talk. Object recognition in computer vision
 Object Recognition Using Pictorial Structures Daniel Huttenlocher Computer Science Department Joint work with Pedro Felzenszwalb, MIT AI Lab In This Talk Object recognition in computer vision Brief definition
Object Recognition Using Pictorial Structures Daniel Huttenlocher Computer Science Department Joint work with Pedro Felzenszwalb, MIT AI Lab In This Talk Object recognition in computer vision Brief definition
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Visual Motion Analysis and Tracking Part II
 Visual Motion Analysis and Tracking Part II David J Fleet and Allan D Jepson CIAR NCAP Summer School July 12-16, 16, 2005 Outline Optical Flow and Tracking: Optical flow estimation (robust, iterative refinement,
Visual Motion Analysis and Tracking Part II David J Fleet and Allan D Jepson CIAR NCAP Summer School July 12-16, 16, 2005 Outline Optical Flow and Tracking: Optical flow estimation (robust, iterative refinement,
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 19: Graph Cuts source S sink T Readings Szeliski, Chapter 11.2 11.5 Stereo results with window search problems in areas of uniform texture Window-based matching
CS6670: Computer Vision Noah Snavely Lecture 19: Graph Cuts source S sink T Readings Szeliski, Chapter 11.2 11.5 Stereo results with window search problems in areas of uniform texture Window-based matching
Lecture 16 Segmentation and Scene understanding
 Lecture 16 Segmentation and Scene understanding Introduction! Mean-shift! Graph-based segmentation! Top-down segmentation! Silvio Savarese Lecture 15 -! 3-Mar-14 Segmentation Silvio Savarese Lecture 15
Lecture 16 Segmentation and Scene understanding Introduction! Mean-shift! Graph-based segmentation! Top-down segmentation! Silvio Savarese Lecture 15 -! 3-Mar-14 Segmentation Silvio Savarese Lecture 15
USING ONE GRAPH-CUT TO FUSE MULTIPLE CANDIDATE MAPS IN DEPTH ESTIMATION
 USING ONE GRAPH-CUT TO FUSE MULTIPLE CANDIDATE MAPS IN DEPTH ESTIMATION F. Pitié Sigmedia Group, Trinity College Dublin, fpitie@mee.tcd.ie Abstract Graph-cut techniques for depth and disparity estimations
USING ONE GRAPH-CUT TO FUSE MULTIPLE CANDIDATE MAPS IN DEPTH ESTIMATION F. Pitié Sigmedia Group, Trinity College Dublin, fpitie@mee.tcd.ie Abstract Graph-cut techniques for depth and disparity estimations
AUTOMATIC OBJECT EXTRACTION IN SINGLE-CONCEPT VIDEOS. Kuo-Chin Lien and Yu-Chiang Frank Wang
 AUTOMATIC OBJECT EXTRACTION IN SINGLE-CONCEPT VIDEOS Kuo-Chin Lien and Yu-Chiang Frank Wang Research Center for Information Technology Innovation, Academia Sinica, Taipei, Taiwan {iker, ycwang}@citi.sinica.edu.tw
AUTOMATIC OBJECT EXTRACTION IN SINGLE-CONCEPT VIDEOS Kuo-Chin Lien and Yu-Chiang Frank Wang Research Center for Information Technology Innovation, Academia Sinica, Taipei, Taiwan {iker, ycwang}@citi.sinica.edu.tw
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Statistical and Learning Techniques in Computer Vision Lecture 1: Markov Random Fields Jens Rittscher and Chuck Stewart
 Statistical and Learning Techniques in Computer Vision Lecture 1: Markov Random Fields Jens Rittscher and Chuck Stewart 1 Motivation Up to now we have considered distributions of a single random variable
Statistical and Learning Techniques in Computer Vision Lecture 1: Markov Random Fields Jens Rittscher and Chuck Stewart 1 Motivation Up to now we have considered distributions of a single random variable
Measuring Uncertainty in Graph Cut Solutions - Efficiently Computing Min-marginal Energies using Dynamic Graph Cuts
 Measuring Uncertainty in Graph Cut Solutions - Efficiently Computing Min-marginal Energies using Dynamic Graph Cuts Pushmeet Kohli Philip H.S. Torr Department of Computing, Oxford Brookes University, Oxford.
Measuring Uncertainty in Graph Cut Solutions - Efficiently Computing Min-marginal Energies using Dynamic Graph Cuts Pushmeet Kohli Philip H.S. Torr Department of Computing, Oxford Brookes University, Oxford.
Shape Prior Segmentation of Multiple Objects with Graph Cuts
 Shape Prior Segmentation of Multiple Objects with Graph Cuts Nhat Vu and B.S. Manjunath Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 {nhat,manj}@ece.ucsb.edu
Shape Prior Segmentation of Multiple Objects with Graph Cuts Nhat Vu and B.S. Manjunath Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 {nhat,manj}@ece.ucsb.edu
Computer vision: models, learning and inference. Chapter 10 Graphical Models
 Computer vision: models, learning and inference Chapter 10 Graphical Models Independence Two variables x 1 and x 2 are independent if their joint probability distribution factorizes as Pr(x 1, x 2 )=Pr(x
Computer vision: models, learning and inference Chapter 10 Graphical Models Independence Two variables x 1 and x 2 are independent if their joint probability distribution factorizes as Pr(x 1, x 2 )=Pr(x
A Graph Theoretic Approach to Image Database Retrieval
 A Graph Theoretic Approach to Image Database Retrieval Selim Aksoy and Robert M. Haralick Intelligent Systems Laboratory Department of Electrical Engineering University of Washington, Seattle, WA 98195-2500
A Graph Theoretic Approach to Image Database Retrieval Selim Aksoy and Robert M. Haralick Intelligent Systems Laboratory Department of Electrical Engineering University of Washington, Seattle, WA 98195-2500
Learning Layered Motion Segmentations of Video
 Learning Layered Motion Segmentations of Video M. Pawan Kumar P.H.S. Torr A. Zisserman Dept. of Computing Dept. of Engineering Science Oxford Brookes University University of Oxford {pkmudigonda,philiptorr}@brookes.ac.uk
Learning Layered Motion Segmentations of Video M. Pawan Kumar P.H.S. Torr A. Zisserman Dept. of Computing Dept. of Engineering Science Oxford Brookes University University of Oxford {pkmudigonda,philiptorr}@brookes.ac.uk
Human Upper Body Pose Estimation in Static Images
 1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
Learning Class-specific Edges for Object Detection and Segmentation
 Learning Class-specific Edges for Object Detection and Segmentation Mukta Prasad 1, Andrew Zisserman 1, Andrew Fitzgibbon 2, M. Pawan Kumar 3 and P. H. S. Torr 3 http://www.robots.ox.ac.uk/ {mukta,vgg}
Learning Class-specific Edges for Object Detection and Segmentation Mukta Prasad 1, Andrew Zisserman 1, Andrew Fitzgibbon 2, M. Pawan Kumar 3 and P. H. S. Torr 3 http://www.robots.ox.ac.uk/ {mukta,vgg}
Algorithms for Markov Random Fields in Computer Vision
 Algorithms for Markov Random Fields in Computer Vision Dan Huttenlocher November, 2003 (Joint work with Pedro Felzenszwalb) Random Field Broadly applicable stochastic model Collection of n sites S Hidden
Algorithms for Markov Random Fields in Computer Vision Dan Huttenlocher November, 2003 (Joint work with Pedro Felzenszwalb) Random Field Broadly applicable stochastic model Collection of n sites S Hidden
Mine Boundary Detection Using Markov Random Field Models
 Mine Boundary Detection Using Markov Random Field Models Xia Hua and Jennifer Davidson Department of Electrical & Computer Engineering Iowa State University Noel Cressie Department of Statistics Iowa State
Mine Boundary Detection Using Markov Random Field Models Xia Hua and Jennifer Davidson Department of Electrical & Computer Engineering Iowa State University Noel Cressie Department of Statistics Iowa State
Principal-channels for One-sided Object Cutout
 Principal-channels for One-sided Object Cutout Lior Gavish, Lior Wolf, Lior Shapira, and Daniel Cohen-Or Tel-Aviv University, Tel-Aviv, Israel Abstract We introduce principal-channels for cutting out objects
Principal-channels for One-sided Object Cutout Lior Gavish, Lior Wolf, Lior Shapira, and Daniel Cohen-Or Tel-Aviv University, Tel-Aviv, Israel Abstract We introduce principal-channels for cutting out objects
CLASSIFICATION WITH RADIAL BASIS AND PROBABILISTIC NEURAL NETWORKS
 CLASSIFICATION WITH RADIAL BASIS AND PROBABILISTIC NEURAL NETWORKS CHAPTER 4 CLASSIFICATION WITH RADIAL BASIS AND PROBABILISTIC NEURAL NETWORKS 4.1 Introduction Optical character recognition is one of
CLASSIFICATION WITH RADIAL BASIS AND PROBABILISTIC NEURAL NETWORKS CHAPTER 4 CLASSIFICATION WITH RADIAL BASIS AND PROBABILISTIC NEURAL NETWORKS 4.1 Introduction Optical character recognition is one of
Water-Filling: A Novel Way for Image Structural Feature Extraction
 Water-Filling: A Novel Way for Image Structural Feature Extraction Xiang Sean Zhou Yong Rui Thomas S. Huang Beckman Institute for Advanced Science and Technology University of Illinois at Urbana Champaign,
Water-Filling: A Novel Way for Image Structural Feature Extraction Xiang Sean Zhou Yong Rui Thomas S. Huang Beckman Institute for Advanced Science and Technology University of Illinois at Urbana Champaign,
Unsupervised Learning
 Networks for Pattern Recognition, 2014 Networks for Single Linkage K-Means Soft DBSCAN PCA Networks for Kohonen Maps Linear Vector Quantization Networks for Problems/Approaches in Machine Learning Supervised
Networks for Pattern Recognition, 2014 Networks for Single Linkage K-Means Soft DBSCAN PCA Networks for Kohonen Maps Linear Vector Quantization Networks for Problems/Approaches in Machine Learning Supervised
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Complex 3D General Object Reconstruction from Line Drawings
 2013 IEEE International Conference on Computer Vision Complex 3D General Object Reconstruction from Line Drawings Linjie Yang 1, Jianzhuang Liu 2,1,3, and Xiaoou Tang 1,2 1 Department of Information Engineering,
2013 IEEE International Conference on Computer Vision Complex 3D General Object Reconstruction from Line Drawings Linjie Yang 1, Jianzhuang Liu 2,1,3, and Xiaoou Tang 1,2 1 Department of Information Engineering,
Two-Level Image Segmentation Based on Region andedgeintegration
 Two-Level Image Segmentation Based on Region andedgeintegration Qing Wu and Yizhou Yu Department of Computer Science University of Illinois at Urbana-Champaign Urbana, IL 61801, USA {qingwu1,yyz}@uiuc.edu
Two-Level Image Segmentation Based on Region andedgeintegration Qing Wu and Yizhou Yu Department of Computer Science University of Illinois at Urbana-Champaign Urbana, IL 61801, USA {qingwu1,yyz}@uiuc.edu
Multi-label image segmentation via max-sum solver
 Multi-label image segmentation via max-sum solver Banislav Mičušík Pattern Recognition and Image Processing Group, Inst. of Computer Aided Automation, Vienna University of Technology, Austria micusik@prip.tuwien.ac.at
Multi-label image segmentation via max-sum solver Banislav Mičušík Pattern Recognition and Image Processing Group, Inst. of Computer Aided Automation, Vienna University of Technology, Austria micusik@prip.tuwien.ac.at
Markov Random Fields and Gibbs Sampling for Image Denoising
 Markov Random Fields and Gibbs Sampling for Image Denoising Chang Yue Electrical Engineering Stanford University changyue@stanfoed.edu Abstract This project applies Gibbs Sampling based on different Markov
Markov Random Fields and Gibbs Sampling for Image Denoising Chang Yue Electrical Engineering Stanford University changyue@stanfoed.edu Abstract This project applies Gibbs Sampling based on different Markov
Extracting Smooth and Transparent Layers from a Single Image
 Extracting Smooth and Transparent Layers from a Single Image Sai-Kit Yeung Tai-Pang Wu Chi-Keung Tang saikit@ust.hk pang@ust.hk cktang@cse.ust.hk Vision and Graphics Group The Hong Kong University of Science
Extracting Smooth and Transparent Layers from a Single Image Sai-Kit Yeung Tai-Pang Wu Chi-Keung Tang saikit@ust.hk pang@ust.hk cktang@cse.ust.hk Vision and Graphics Group The Hong Kong University of Science
Simultaneous Appearance Modeling and Segmentation for Matching People under Occlusion
 Simultaneous Appearance Modeling and Segmentation for Matching People under Occlusion Zhe Lin, Larry S. Davis, David Doermann, and Daniel DeMenthon Institute for Advanced Computer Studies University of
Simultaneous Appearance Modeling and Segmentation for Matching People under Occlusion Zhe Lin, Larry S. Davis, David Doermann, and Daniel DeMenthon Institute for Advanced Computer Studies University of
Contrast adjustment via Bayesian sequential partitioning
 Contrast adjustment via Bayesian sequential partitioning Zhiyu Wang, Shuo Xie, Bai Jiang Abstract Photographs taken in dim light have low color contrast. However, traditional methods for adjusting contrast
Contrast adjustment via Bayesian sequential partitioning Zhiyu Wang, Shuo Xie, Bai Jiang Abstract Photographs taken in dim light have low color contrast. However, traditional methods for adjusting contrast
Object Segmentation Using Graph Cuts Based Active Contours
 Object Segmentation Using Graph Cuts Based Active Contours Ning Xu Beckman Institute & ECE Dept. University of Illinois Urbana, IL, USA ningxu@vision.ai.uiuc.edu Ravi Bansal Department of Psychiatry Columbia
Object Segmentation Using Graph Cuts Based Active Contours Ning Xu Beckman Institute & ECE Dept. University of Illinois Urbana, IL, USA ningxu@vision.ai.uiuc.edu Ravi Bansal Department of Psychiatry Columbia
Detecting Object Boundaries Using Low-, Mid-, and High-level Information
 Detecting Object Boundaries Using Low-, Mid-, and High-level Information Songfeng Zheng Dept. of Statistics, UCLA sfzheng@stat.ucla.edu Zhuowen Tu Lab of Neuro Imaging, UCLA zhuowen.tu@loni.ucla.edu Alan
Detecting Object Boundaries Using Low-, Mid-, and High-level Information Songfeng Zheng Dept. of Statistics, UCLA sfzheng@stat.ucla.edu Zhuowen Tu Lab of Neuro Imaging, UCLA zhuowen.tu@loni.ucla.edu Alan
Cellular Learning Automata-Based Color Image Segmentation using Adaptive Chains
 Cellular Learning Automata-Based Color Image Segmentation using Adaptive Chains Ahmad Ali Abin, Mehran Fotouhi, Shohreh Kasaei, Senior Member, IEEE Sharif University of Technology, Tehran, Iran abin@ce.sharif.edu,
Cellular Learning Automata-Based Color Image Segmentation using Adaptive Chains Ahmad Ali Abin, Mehran Fotouhi, Shohreh Kasaei, Senior Member, IEEE Sharif University of Technology, Tehran, Iran abin@ce.sharif.edu,
Hough Regions for Joining Instance Localization and Segmentation
 Hough Regions for Joining Instance Localization and Segmentation Hayko Riemenschneider 1,2, Sabine Sternig 1, Michael Donoser 1, Peter M. Roth 1, and Horst Bischof 1 1 Institute for Computer Graphics and
Hough Regions for Joining Instance Localization and Segmentation Hayko Riemenschneider 1,2, Sabine Sternig 1, Michael Donoser 1, Peter M. Roth 1, and Horst Bischof 1 1 Institute for Computer Graphics and