Beyond Mere Pixels: How Can Computers Interpret and Compare Digital Images? Nicholas R. Howe Cornell University
|
|
|
- Osborn Ford
- 6 years ago
- Views:
Transcription
1 Beyond Mere Pixels: How Can Computers Interpret and Compare Digital Images? Nicholas R. Howe Cornell University

2 Why Image Retrieval? World Wide Web: Millions of hosts Billions of images Growth of video libraries Photography: going digital Nicholas R. Howe Beyond Mere Pixels 2







3 Image Retrieval Framework Collection of diverse images User supplies a query image. System returns most similar images from collection. Nicholas R. Howe Beyond Mere Pixels 3

4 Image Similarity & Retrieval Measuring the similarity between two images is a difficult test of image understanding.? 60%?? 90%? Q. Given a bunch of images, which are most similar to one I m interested in? Nicholas R. Howe Beyond Mere Pixels 4
5 Q. What s This? Nicholas R. Howe Beyond Mere Pixels 5

6 Difficulties With Digital Images Digital photographs are Bit-mapped Low-resolution Restricted in color Nicholas R. Howe Beyond Mere Pixels 6




7 The Amazing Brain The brain sees more than just pixels. Aggregation into objects and larger regions is automatic & unconscious. Visual memory plays a role. Nicholas R. Howe Beyond Mere Pixels 7

 Nicholas R.")
8 The Amazing Brain (2) The brain synthesizes diverse sources of information: Shape Texture/Shading Multiple cues Seemingly effortless (?) Nicholas R. Howe Beyond Mere Pixels 8
9 Brain-Like Computers? What we need is computers that can work more like brains. Analysis of shapes, region, and texture Semantic labeling of image content Association with known models of objects, materials, and scenes Increasing Difficulty Nicholas R. Howe Beyond Mere Pixels 9
 Nicholas R.")
10 Dumb Stuff That Works Some simple (reliable) statistics work better than cognitively plausible (unreliable) ones. Classic example: color histograms for similarity (Swain & Ballard 1991) Nicholas R. Howe Beyond Mere Pixels 10



11 Color Histograms Work Comparisons on more than 20,000 images: Given this These images are the most similar: Color histograms form the core of most working systems today. Nicholas R. Howe Beyond Mere Pixels 11

12 But Not Always Some related images have very different histograms. Some unrelated images have nearly the same histogram. Nicholas R. Howe Beyond Mere Pixels 12
 have been particularly successful. Nicholas R.")
13 Variation: Color Correlograms Other statistical measures of image properties improve on color histograms. Table of Probabilities Correlograms (Huang et. al., 1997) have been particularly successful. Nicholas R. Howe Beyond Mere Pixels 13
14 Correlogram Details Correlograms consist of a table of probabilities. ( color( b) = x ( color( a = x) ( a b y)) C ( x, y) = P ) = Red Orange Yellow etc 1 pixel pixels pixels Given a pixel of color x, the probability that a pixel chosen distance y away is also color x Correlograms can be compared like vectors. Nicholas R. Howe Beyond Mere Pixels 14

15 We Can Do Better How can we do something smarter? Must incorporate spatial information & objects Must employ multiple cues Must adapt to lighting, etc. Nicholas R. Howe Beyond Mere Pixels 15
16 Approach 1. Segmentation Identifies spatial patterns and objects. 2. Vector Representation Includes color, texture, and location cues. 3. Vector Comparison Allows adaptation for varying conditions. 4. Focus on Objects? Nicholas R. Howe Beyond Mere Pixels 16

17 Segmentation Segmenting an image means dividing it into regions that belong together. Q. What s a sensible way to segment any given picture? Nicholas R. Howe Beyond Mere Pixels 17

18 Characterizing Regions When humans segment an image, they can explain why each region hangs together. Red flowers Bluish cloudy sky Green lawn Models motivate the grouping into regions. Nicholas R. Howe Beyond Mere Pixels 18

19 Mathematical Models of Regions Model regions as smooth functions + noise: = + 2D example: Smooth function: Noise profile: Nicholas R. Howe Beyond Mere Pixels 19


20 Models of Regions (2) Each model tries to predict the image. Successful models are rare. Correct here Incorrect here Bad model Good model Nicholas R. Howe Beyond Mere Pixels 20
 Goal: Nicholas R.")
21 Outline of Segmentation Process 1. Start with small local regions. (Felzenszwalb & Huttenlocher 1998) 2. Create a pool of potential models. 3. Measure fit between all models & local regions. 4. Select a small number of models that fit many local regions well. (Details on the next slide) Goal: Nicholas R. Howe Beyond Mere Pixels 21
22 Segmentation Details Best segmentation found via energy minimization: E ( R) = Fit( r, M ) + Δ( r, r r 1 2 r R r R r R 1 2 ) The energy of a segmentation into regions R is equal to the fit of each region with its model plus a penalty to discourage excess regions. Minimum energy is difficult to compute in general. Nicholas R. Howe Beyond Mere Pixels 22
23 Graph Formulation Minimum energy = minimum graph cut (compare with Boykov, et. al., 1998) Model Model Model Model Model nodes Region nodes Nicholas R. Howe Beyond Mere Pixels 23

24 Graph Formulation (2) Minimum graph cut = best segmentation Running time bound: quadratic in # of nodes Quality bound: Energy found is 2 optimal. Nicholas R. Howe Beyond Mere Pixels 24



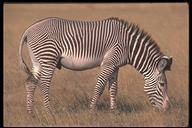
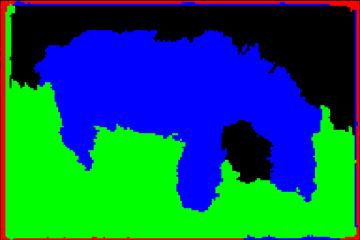


25 Examples Nicholas R. Howe Beyond Mere Pixels 25
26 Related Work Stereo Vision & Energy Minimization (Boykov, Vexler & Zabih, 1998) Normalized Cuts (Shi & Malik, 1997) JSEG (Deng, Manjunath, & Shin, 1999) Nicholas R. Howe Beyond Mere Pixels 26
 Describe each patch using multiple features. Color Texture Location Combine such that each piece is preserved.")
27 A Region-Based Representation Begin with segmentation. (Provides locality.) Describe each patch using multiple features. Color Texture Location Combine such that each piece is preserved. Nicholas R. Howe Beyond Mere Pixels 27
28 Describing an Image by its Parts Discretize the range of each feature. (Color, texture, and location) Count area in image described by each combination of features. Blue-Smooth-TopLeft: 5, Blue-Smooth-TopMiddle: 1, Green-Smooth-TopLeft: 0, etc. Location Texture Color Nicholas R. Howe Beyond Mere Pixels 28

29 Discretization Color: 28 bins Texture: 3 bins (smooth, textured, rough) Location: 25 bins Total: = 2100 combinations Nicholas R. Howe Beyond Mere Pixels 29
30 Vector Representation Final representation of image is a vector with 2100 dimensions. v = v c v,..., v, v,..., 1 t1l1 c1t1l 2 c1t1l 25 c1t 2l1, vc t l Each dimension records how much of a particular type of material is present. e.g., how much smooth blue in the top left corner? Nicholas R. Howe Beyond Mere Pixels 30
31 Comparison Vectors are points in space. Images with similar composition will have similar (normalized) vectors. Angle between similar vectors will be small. Similar a b c a Dissimilar Nicholas R. Howe Beyond Mere Pixels 31
32 Comparison (2) Compare two images using a cosine metric: D( v 1, v 2 ) = cos 1 ( v T 1 v T 1 Sv 1 Sv 2 )( v T 2 Sv 2 ) Note generalization using S matrix: S = I is standard cosine metric. Other values of S allow adjustments to metric. Nicholas R. Howe Beyond Mere Pixels 32
 Nicholas R.")
33 Comparison: Match Coefficients Discretization of features loses some similarity information. e.g., Blue is closer to Green than to Orange. Such partial matches may be encoded in off-diagonal terms of S. second value first value (lighter more similar) Nicholas R. Howe Beyond Mere Pixels 33

34 Evaluating the Vector Method Two sets of test images: 12 and 16 categories of ~100 images each Classification task Most similar known image is used to classify unknown images.? Closest image Classify unknown as tiger Nicholas R. Howe Beyond Mere Pixels 34












35 Sample Categories Airshows Caves Elephants Skiers Polar Bears Stained Glass Nicholas R. Howe Beyond Mere Pixels 35
36 Classification Results Comparison with histograms and correlograms: Percent Correct Set One Set Two Histograms Correlograms Vector Method (overall results) Outperforms baseline (histogram, green). Competitive with advanced image metric (correlogram, blue). Nicholas R. Howe Beyond Mere Pixels 36

 Rank 1 (of 19,000)")
37 Object Queries Something we ve wanted to do all along: Search for objects, not whole images. Rank 60 (of 19,000) Rank 1 (of 19,000) Nicholas R. Howe Beyond Mere Pixels 37
38 How Object Queries Work S(i,j) = S object (i,j) if i and j appear in the target object. S background (i,j) if neither i nor j appear in the target. 0 otherwise. 0 0 S object (strict match) S background (loose match) Nicholas R. Howe Beyond Mere Pixels 38





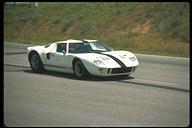


39 Testing Object Queries 200 images of cars Visual context is irrelevant. Classes are colors of car. Nicholas R. Howe Beyond Mere Pixels 39
40 Sample Result (Red Cars) Nicholas R. Howe Beyond Mere Pixels 40
41 Summary Vector representation preserves critical image features. Retrieval with vector representation is competitive with other techniques on full images. Flexible use of regions allows search for objects & arbitrary figures of interest. Nicholas R. Howe Beyond Mere Pixels 41
42 Related Work Vector Representation Howe & Huttenlocher, 2000; Howe, 2000; Howe 1998 Earth Mover s Distance Cohen, 1999 Blobworld (UC Berkeley) Carson et. al., 1999; Belongie et. al., 1997 Netra (UCSB) Deng & Manjunath 1999; Ma & Manjunath, 1997 Nicholas R. Howe Beyond Mere Pixels 42

43 The Future Moving away from absolutism OK, we can find red cars. Can we find cars? Relational encodings: White fur next to red velvet A piece of all the same color Interplay between segmentation, similarity, and compression/coding e.g., Color & texture from segment model Nicholas R. Howe Beyond Mere Pixels 43


44 Challenges Assumption: parts that belong together should look alike not always true! More sophisticated region models may help. Nicholas R. Howe Beyond Mere Pixels 44
 Nicholas R.")
45 Generating the S Matrix S assembled from matrices S j for each feature (Color) (Location) Smaller matrices are determined by the similarity of the feature values. Kronecker product e.g., Blue-Green vs. Blue -Orange. (Color and Location) Nicholas R. Howe Beyond Mere Pixels 45
46 Alternate View of S Matrix Cholesky factorization of S: S = T T T Cosine metric of modified vectors: T 1 ( Tv1) ( Tv 2) D( v ) = cos 1, v2 T ( Tv1) ( Tv1) ( Tv 2) ( )( T ( Tv )) 2 v 1 Tv 2 v 2 No Overlap Tv 1 Overlap Nicholas R. Howe Beyond Mere Pixels 46
47 Optimizations Similarity computation is linear in sparse vector v. Computed once per query D( v 1, v 2 ) = cos 1 ( v T 1 v T 1 Sv 1 Sv 2 )( v T 2 Sv 2 ) Precompute & cache Nicholas R. Howe Beyond Mere Pixels 47
48 Search Pruning Nearest neighbor search can be pruned by projection onto lower-dimensional spaces. α β β is lower bound on α. Images with β greater than some cutoff need not be considered. Nicholas R. Howe Beyond Mere Pixels 48
49 Dividing the Color Space Color seeds are dispersed evenly in HSV color cone. Divided into Voronoi regions. Ensures perceptual uniformity. Nicholas R. Howe Beyond Mere Pixels 49
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Integrating Color, Texture, and Geometry for Image Retrieval
 Integrating Color, Texture, and Geometry for Image Retrieval Nicholas R. Howe Daniel P. Huttenlocher Cornell University Department of Computer Science Ithaca, NY 14853 {nihowe,dph}@cs.cornell.edu Abstract
Integrating Color, Texture, and Geometry for Image Retrieval Nicholas R. Howe Daniel P. Huttenlocher Cornell University Department of Computer Science Ithaca, NY 14853 {nihowe,dph}@cs.cornell.edu Abstract
Textural Features for Image Database Retrieval
 Textural Features for Image Database Retrieval Selim Aksoy and Robert M. Haralick Intelligent Systems Laboratory Department of Electrical Engineering University of Washington Seattle, WA 98195-2500 {aksoy,haralick}@@isl.ee.washington.edu
Textural Features for Image Database Retrieval Selim Aksoy and Robert M. Haralick Intelligent Systems Laboratory Department of Electrical Engineering University of Washington Seattle, WA 98195-2500 {aksoy,haralick}@@isl.ee.washington.edu
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Task Description: Finding Similar Documents. Document Retrieval. Case Study 2: Document Retrieval
 Case Study 2: Document Retrieval Task Description: Finding Similar Documents Machine Learning for Big Data CSE547/STAT548, University of Washington Sham Kakade April 11, 2017 Sham Kakade 2017 1 Document
Case Study 2: Document Retrieval Task Description: Finding Similar Documents Machine Learning for Big Data CSE547/STAT548, University of Washington Sham Kakade April 11, 2017 Sham Kakade 2017 1 Document
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Texture. COS 429 Princeton University
 Texture COS 429 Princeton University Texture What is a texture? Antonio Torralba Texture What is a texture? Antonio Torralba Texture What is a texture? Antonio Torralba Texture Texture is stochastic and
Texture COS 429 Princeton University Texture What is a texture? Antonio Torralba Texture What is a texture? Antonio Torralba Texture What is a texture? Antonio Torralba Texture Texture is stochastic and
Problem 1: Complexity of Update Rules for Logistic Regression
 Case Study 1: Estimating Click Probabilities Tackling an Unknown Number of Features with Sketching Machine Learning for Big Data CSE547/STAT548, University of Washington Emily Fox January 16 th, 2014 1
Case Study 1: Estimating Click Probabilities Tackling an Unknown Number of Features with Sketching Machine Learning for Big Data CSE547/STAT548, University of Washington Emily Fox January 16 th, 2014 1
An Introduction to Content Based Image Retrieval
 CHAPTER -1 An Introduction to Content Based Image Retrieval 1.1 Introduction With the advancement in internet and multimedia technologies, a huge amount of multimedia data in the form of audio, video and
CHAPTER -1 An Introduction to Content Based Image Retrieval 1.1 Introduction With the advancement in internet and multimedia technologies, a huge amount of multimedia data in the form of audio, video and
Texture. Texture is a description of the spatial arrangement of color or intensities in an image or a selected region of an image.
 Texture Texture is a description of the spatial arrangement of color or intensities in an image or a selected region of an image. Structural approach: a set of texels in some regular or repeated pattern
Texture Texture is a description of the spatial arrangement of color or intensities in an image or a selected region of an image. Structural approach: a set of texels in some regular or repeated pattern
A Graph Theoretic Approach to Image Database Retrieval
 A Graph Theoretic Approach to Image Database Retrieval Selim Aksoy and Robert M. Haralick Intelligent Systems Laboratory Department of Electrical Engineering University of Washington, Seattle, WA 98195-2500
A Graph Theoretic Approach to Image Database Retrieval Selim Aksoy and Robert M. Haralick Intelligent Systems Laboratory Department of Electrical Engineering University of Washington, Seattle, WA 98195-2500
Selective Search for Object Recognition
 Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Multi-Class Segmentation with Relative Location Prior
 Multi-Class Segmentation with Relative Location Prior Stephen Gould, Jim Rodgers, David Cohen, Gal Elidan, Daphne Koller Department of Computer Science, Stanford University International Journal of Computer
Multi-Class Segmentation with Relative Location Prior Stephen Gould, Jim Rodgers, David Cohen, Gal Elidan, Daphne Koller Department of Computer Science, Stanford University International Journal of Computer
Tools for texture/color based search of images
 pp 496-507, SPIE Int. Conf. 3106, Human Vision and Electronic Imaging II, Feb. 1997. Tools for texture/color based search of images W. Y. Ma, Yining Deng, and B. S. Manjunath Department of Electrical and
pp 496-507, SPIE Int. Conf. 3106, Human Vision and Electronic Imaging II, Feb. 1997. Tools for texture/color based search of images W. Y. Ma, Yining Deng, and B. S. Manjunath Department of Electrical and
Markov Random Fields and Segmentation with Graph Cuts
 Markov Random Fields and Segmentation with Graph Cuts Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project Proposal due Oct 27 (Thursday) HW 4 is out
Markov Random Fields and Segmentation with Graph Cuts Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project Proposal due Oct 27 (Thursday) HW 4 is out
Pattern recognition. Classification/Clustering GW Chapter 12 (some concepts) Textures
 Textures") Pattern recognition Classification/Clustering GW Chapter 12 (some concepts) Textures Patterns and pattern classes Pattern: arrangement of descriptors Descriptors: features Patten class: family of patterns
Pattern recognition Classification/Clustering GW Chapter 12 (some concepts) Textures Patterns and pattern classes Pattern: arrangement of descriptors Descriptors: features Patten class: family of patterns
Learning Semantic Concepts from Visual Data Using Neural Networks
 Learning Semantic Concepts from Visual Data Using Neural Networks Xiaohang Ma and Dianhui Wang Department of Computer Science and Computer Engineering, La Trobe University, Melbourne, VIC 3083, Australia
Learning Semantic Concepts from Visual Data Using Neural Networks Xiaohang Ma and Dianhui Wang Department of Computer Science and Computer Engineering, La Trobe University, Melbourne, VIC 3083, Australia
Lecture 10: Semantic Segmentation and Clustering
 Lecture 10: Semantic Segmentation and Clustering Vineet Kosaraju, Davy Ragland, Adrien Truong, Effie Nehoran, Maneekwan Toyungyernsub Department of Computer Science Stanford University Stanford, CA 94305
Lecture 10: Semantic Segmentation and Clustering Vineet Kosaraju, Davy Ragland, Adrien Truong, Effie Nehoran, Maneekwan Toyungyernsub Department of Computer Science Stanford University Stanford, CA 94305
Color Image Segmentation
 Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
Identifying Layout Classes for Mathematical Symbols Using Layout Context
 Rochester Institute of Technology RIT Scholar Works Articles 2009 Identifying Layout Classes for Mathematical Symbols Using Layout Context Ling Ouyang Rochester Institute of Technology Richard Zanibbi
Rochester Institute of Technology RIT Scholar Works Articles 2009 Identifying Layout Classes for Mathematical Symbols Using Layout Context Ling Ouyang Rochester Institute of Technology Richard Zanibbi
Color. making some recognition problems easy. is 400nm (blue) to 700 nm (red) more; ex. X-rays, infrared, radio waves. n Used heavily in human vision
 to 700 nm (red) more; ex. X-rays, infrared, radio waves. n Used heavily in human vision") Color n Used heavily in human vision n Color is a pixel property, making some recognition problems easy n Visible spectrum for humans is 400nm (blue) to 700 nm (red) n Machines can see much more; ex. X-rays,
Color n Used heavily in human vision n Color is a pixel property, making some recognition problems easy n Visible spectrum for humans is 400nm (blue) to 700 nm (red) n Machines can see much more; ex. X-rays,
Distribution Distance Functions
 COMP 875 November 10, 2009 Matthew O Meara Question How similar are these? Outline Motivation Protein Score Function Object Retrieval Kernel Machines 1 Motivation Protein Score Function Object Retrieval
COMP 875 November 10, 2009 Matthew O Meara Question How similar are these? Outline Motivation Protein Score Function Object Retrieval Kernel Machines 1 Motivation Protein Score Function Object Retrieval
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
SVM-KNN : Discriminative Nearest Neighbor Classification for Visual Category Recognition
 SVM-KNN : Discriminative Nearest Neighbor Classification for Visual Category Recognition Hao Zhang, Alexander Berg, Michael Maire Jitendra Malik EECS, UC Berkeley Presented by Adam Bickett Objective Visual
SVM-KNN : Discriminative Nearest Neighbor Classification for Visual Category Recognition Hao Zhang, Alexander Berg, Michael Maire Jitendra Malik EECS, UC Berkeley Presented by Adam Bickett Objective Visual
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Image Processing. David Kauchak cs160 Fall Empirical Evaluation of Dissimilarity Measures for Color and Texture
 Image Processing Empirical Evaluation of Dissimilarity Measures for Color and Texture Jan Puzicha, Joachim M. Buhmann, Yossi Rubner & Carlo Tomasi David Kauchak cs160 Fall 2009 Administrative 11/4 class
Image Processing Empirical Evaluation of Dissimilarity Measures for Color and Texture Jan Puzicha, Joachim M. Buhmann, Yossi Rubner & Carlo Tomasi David Kauchak cs160 Fall 2009 Administrative 11/4 class
Object Detection Using Segmented Images
 Object Detection Using Segmented Images Naran Bayanbat Stanford University Palo Alto, CA naranb@stanford.edu Jason Chen Stanford University Palo Alto, CA jasonch@stanford.edu Abstract Object detection
Object Detection Using Segmented Images Naran Bayanbat Stanford University Palo Alto, CA naranb@stanford.edu Jason Chen Stanford University Palo Alto, CA jasonch@stanford.edu Abstract Object detection
Region-based Segmentation and Object Detection
 Region-based Segmentation and Object Detection Stephen Gould Tianshi Gao Daphne Koller Presented at NIPS 2009 Discussion and Slides by Eric Wang April 23, 2010 Outline Introduction Model Overview Model
Region-based Segmentation and Object Detection Stephen Gould Tianshi Gao Daphne Koller Presented at NIPS 2009 Discussion and Slides by Eric Wang April 23, 2010 Outline Introduction Model Overview Model
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Tracking Computer Vision Spring 2018, Lecture 24
 Tracking http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 24 Course announcements Homework 6 has been posted and is due on April 20 th. - Any questions about the homework? - How
Tracking http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 24 Course announcements Homework 6 has been posted and is due on April 20 th. - Any questions about the homework? - How
Short Run length Descriptor for Image Retrieval
 CHAPTER -6 Short Run length Descriptor for Image Retrieval 6.1 Introduction In the recent years, growth of multimedia information from various sources has increased many folds. This has created the demand
CHAPTER -6 Short Run length Descriptor for Image Retrieval 6.1 Introduction In the recent years, growth of multimedia information from various sources has increased many folds. This has created the demand
Computer Vision. Exercise Session 10 Image Categorization
 Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
Lecture 24: More on Reflectance CAP 5415
 Lecture 24: More on Reflectance CAP 5415 Recovering Shape We ve talked about photometric stereo, where we assumed that a surface was diffuse Could calculate surface normals and albedo What if the surface
Lecture 24: More on Reflectance CAP 5415 Recovering Shape We ve talked about photometric stereo, where we assumed that a surface was diffuse Could calculate surface normals and albedo What if the surface
A Qualitative Analysis of 3D Display Technology
 A Qualitative Analysis of 3D Display Technology Nicholas Blackhawk, Shane Nelson, and Mary Scaramuzza Computer Science St. Olaf College 1500 St. Olaf Ave Northfield, MN 55057 scaramum@stolaf.edu Abstract
A Qualitative Analysis of 3D Display Technology Nicholas Blackhawk, Shane Nelson, and Mary Scaramuzza Computer Science St. Olaf College 1500 St. Olaf Ave Northfield, MN 55057 scaramum@stolaf.edu Abstract
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu. Lectures 21 & 22 Segmentation and clustering
 Ifeoma Nwogu. Lectures 21 & 22 Segmentation and clustering") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu Lectures 21 & 22 Segmentation and clustering 1 Schedule Last class We started on segmentation Today Segmentation continued Readings
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu Lectures 21 & 22 Segmentation and clustering 1 Schedule Last class We started on segmentation Today Segmentation continued Readings
doc. RNDr. Tomáš Skopal, Ph.D. Department of Software Engineering, Faculty of Information Technology, Czech Technical University in Prague
 Praha & EU: Investujeme do vaší budoucnosti Evropský sociální fond course: Searching the Web and Multimedia Databases (BI-VWM) Tomáš Skopal, 2011 SS2010/11 doc. RNDr. Tomáš Skopal, Ph.D. Department of
Praha & EU: Investujeme do vaší budoucnosti Evropský sociální fond course: Searching the Web and Multimedia Databases (BI-VWM) Tomáš Skopal, 2011 SS2010/11 doc. RNDr. Tomáš Skopal, Ph.D. Department of
Content-Based Image Retrieval Readings: Chapter 8:
 Content-Based Image Retrieval Readings: Chapter 8: 8.1-8.4 Queries Commercial Systems Retrieval Features Indexing in the FIDS System Lead-in to Object Recognition 1 Content-based Image Retrieval (CBIR)
Content-Based Image Retrieval Readings: Chapter 8: 8.1-8.4 Queries Commercial Systems Retrieval Features Indexing in the FIDS System Lead-in to Object Recognition 1 Content-based Image Retrieval (CBIR)
Introduction to Similarity Search in Multimedia Databases
 Introduction to Similarity Search in Multimedia Databases Tomáš Skopal Charles University in Prague Faculty of Mathematics and Phycics SIRET research group http://siret.ms.mff.cuni.cz March 23 rd 2011,
Introduction to Similarity Search in Multimedia Databases Tomáš Skopal Charles University in Prague Faculty of Mathematics and Phycics SIRET research group http://siret.ms.mff.cuni.cz March 23 rd 2011,
Practice Exam Sample Solutions
 CS 675 Computer Vision Instructor: Marc Pomplun Practice Exam Sample Solutions Note that in the actual exam, no calculators, no books, and no notes allowed. Question 1: out of points Question 2: out of
CS 675 Computer Vision Instructor: Marc Pomplun Practice Exam Sample Solutions Note that in the actual exam, no calculators, no books, and no notes allowed. Question 1: out of points Question 2: out of
Combining Appearance and Topology for Wide
 Combining Appearance and Topology for Wide Baseline Matching Dennis Tell and Stefan Carlsson Presented by: Josh Wills Image Point Correspondences Critical foundation for many vision applications 3-D reconstruction,
Combining Appearance and Topology for Wide Baseline Matching Dennis Tell and Stefan Carlsson Presented by: Josh Wills Image Point Correspondences Critical foundation for many vision applications 3-D reconstruction,
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
EE 701 ROBOT VISION. Segmentation
 EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
Percentile Blobs for Image Similarity
 Percentile Blobs for Image Similarity Nicholas R. Howe Cornell University Department of Computer Science Ithaca, NY 14853 nihowe@cs.cornell.edu Abstract We present a new algorithm called PBSIM for computing
Percentile Blobs for Image Similarity Nicholas R. Howe Cornell University Department of Computer Science Ithaca, NY 14853 nihowe@cs.cornell.edu Abstract We present a new algorithm called PBSIM for computing
COS Lecture 10 Autonomous Robot Navigation
 COS 495 - Lecture 10 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 10 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
ADAPTIVE TEXTURE IMAGE RETRIEVAL IN TRANSFORM DOMAIN
 THE SEVENTH INTERNATIONAL CONFERENCE ON CONTROL, AUTOMATION, ROBOTICS AND VISION (ICARCV 2002), DEC. 2-5, 2002, SINGAPORE. ADAPTIVE TEXTURE IMAGE RETRIEVAL IN TRANSFORM DOMAIN Bin Zhang, Catalin I Tomai,
THE SEVENTH INTERNATIONAL CONFERENCE ON CONTROL, AUTOMATION, ROBOTICS AND VISION (ICARCV 2002), DEC. 2-5, 2002, SINGAPORE. ADAPTIVE TEXTURE IMAGE RETRIEVAL IN TRANSFORM DOMAIN Bin Zhang, Catalin I Tomai,
2. LITERATURE REVIEW
 2. LITERATURE REVIEW CBIR has come long way before 1990 and very little papers have been published at that time, however the number of papers published since 1997 is increasing. There are many CBIR algorithms
2. LITERATURE REVIEW CBIR has come long way before 1990 and very little papers have been published at that time, however the number of papers published since 1997 is increasing. There are many CBIR algorithms
Applications. Foreground / background segmentation Finding skin-colored regions. Finding the moving objects. Intelligent scissors
 Segmentation I Goal Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Applications Intelligent
Segmentation I Goal Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Applications Intelligent
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Markov Networks in Computer Vision
 Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
A Content Based Image Retrieval System Based on Color Features
 A Content Based Image Retrieval System Based on Features Irena Valova, University of Rousse Angel Kanchev, Department of Computer Systems and Technologies, Rousse, Bulgaria, Irena@ecs.ru.acad.bg Boris
A Content Based Image Retrieval System Based on Features Irena Valova, University of Rousse Angel Kanchev, Department of Computer Systems and Technologies, Rousse, Bulgaria, Irena@ecs.ru.acad.bg Boris
Image Processing Techniques and Smart Image Manipulation : Texture Synthesis
 CS294-13: Special Topics Lecture #15 Advanced Computer Graphics University of California, Berkeley Monday, 26 October 2009 Image Processing Techniques and Smart Image Manipulation : Texture Synthesis Lecture
CS294-13: Special Topics Lecture #15 Advanced Computer Graphics University of California, Berkeley Monday, 26 October 2009 Image Processing Techniques and Smart Image Manipulation : Texture Synthesis Lecture
Targil 12 : Image Segmentation. Image segmentation. Why do we need it? Image segmentation
 Targil : Image Segmentation Image segmentation Many slides from Steve Seitz Segment region of the image which: elongs to a single object. Looks uniform (gray levels, color ) Have the same attributes (texture
Targil : Image Segmentation Image segmentation Many slides from Steve Seitz Segment region of the image which: elongs to a single object. Looks uniform (gray levels, color ) Have the same attributes (texture
Grouping and Segmentation
 03/17/15 Grouping and Segmentation Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class Segmentation and grouping Gestalt cues By clustering (mean-shift) By boundaries (watershed)
03/17/15 Grouping and Segmentation Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class Segmentation and grouping Gestalt cues By clustering (mean-shift) By boundaries (watershed)
Automatic Colorization of Grayscale Images
 Automatic Colorization of Grayscale Images Austin Sousa Rasoul Kabirzadeh Patrick Blaes Department of Electrical Engineering, Stanford University 1 Introduction ere exists a wealth of photographic images,
Automatic Colorization of Grayscale Images Austin Sousa Rasoul Kabirzadeh Patrick Blaes Department of Electrical Engineering, Stanford University 1 Introduction ere exists a wealth of photographic images,
(Refer Slide Time 00:17) Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)
 Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)") Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Sequential Maximum Entropy Coding as Efficient Indexing for Rapid Navigation through Large Image Repositories
 Sequential Maximum Entropy Coding as Efficient Indexing for Rapid Navigation through Large Image Repositories Guoping Qiu, Jeremy Morris and Xunli Fan School of Computer Science, The University of Nottingham
Sequential Maximum Entropy Coding as Efficient Indexing for Rapid Navigation through Large Image Repositories Guoping Qiu, Jeremy Morris and Xunli Fan School of Computer Science, The University of Nottingham
Markov Networks in Computer Vision. Sargur Srihari
 Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Color and Shading. Color. Shapiro and Stockman, Chapter 6. Color and Machine Vision. Color and Perception
 Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
Edge Histogram Descriptor, Geometric Moment and Sobel Edge Detector Combined Features Based Object Recognition and Retrieval System
 Edge Histogram Descriptor, Geometric Moment and Sobel Edge Detector Combined Features Based Object Recognition and Retrieval System Neetesh Prajapati M. Tech Scholar VNS college,bhopal Amit Kumar Nandanwar
Edge Histogram Descriptor, Geometric Moment and Sobel Edge Detector Combined Features Based Object Recognition and Retrieval System Neetesh Prajapati M. Tech Scholar VNS college,bhopal Amit Kumar Nandanwar
Linear combinations of simple classifiers for the PASCAL challenge
 Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Texture April 17 th, 2018
 Texture April 17 th, 2018 Yong Jae Lee UC Davis Announcements PS1 out today Due 5/2 nd, 11:59 pm start early! 2 Review: last time Edge detection: Filter for gradient Threshold gradient magnitude, thin
Texture April 17 th, 2018 Yong Jae Lee UC Davis Announcements PS1 out today Due 5/2 nd, 11:59 pm start early! 2 Review: last time Edge detection: Filter for gradient Threshold gradient magnitude, thin
Nearest Neighbor with KD Trees
 Case Study 2: Document Retrieval Finding Similar Documents Using Nearest Neighbors Machine Learning/Statistics for Big Data CSE599C1/STAT592, University of Washington Emily Fox January 22 nd, 2013 1 Nearest
Case Study 2: Document Retrieval Finding Similar Documents Using Nearest Neighbors Machine Learning/Statistics for Big Data CSE599C1/STAT592, University of Washington Emily Fox January 22 nd, 2013 1 Nearest
Cluster Analysis. Mu-Chun Su. Department of Computer Science and Information Engineering National Central University 2003/3/11 1
 Cluster Analysis Mu-Chun Su Department of Computer Science and Information Engineering National Central University 2003/3/11 1 Introduction Cluster analysis is the formal study of algorithms and methods
Cluster Analysis Mu-Chun Su Department of Computer Science and Information Engineering National Central University 2003/3/11 1 Introduction Cluster analysis is the formal study of algorithms and methods
Generative and discriminative classification techniques
 Generative and discriminative classification techniques Machine Learning and Category Representation 2014-2015 Jakob Verbeek, November 28, 2014 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.14.15
Generative and discriminative classification techniques Machine Learning and Category Representation 2014-2015 Jakob Verbeek, November 28, 2014 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.14.15
Title: Adaptive Region Merging Segmentation of Airborne Imagery for Roof Condition Assessment. Abstract:
 Title: Adaptive Region Merging Segmentation of Airborne Imagery for Roof Condition Assessment Abstract: In order to perform residential roof condition assessment with very-high-resolution airborne imagery,
Title: Adaptive Region Merging Segmentation of Airborne Imagery for Roof Condition Assessment Abstract: In order to perform residential roof condition assessment with very-high-resolution airborne imagery,
intro, applications MRF, labeling... how it can be computed at all? Applications in segmentation: GraphCut, GrabCut, demos
 Image as Markov Random Field and Applications 1 Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Talk Outline Last update:
Image as Markov Random Field and Applications 1 Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Talk Outline Last update:
Segmentation and Grouping April 19 th, 2018
 Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Semantic Segmentation of Street-Side Images
 Semantic Segmentation of Street-Side Images Michal Recky 1, Franz Leberl 2 1 Institute for Computer Graphics and Vision Graz University of Technology recky@icg.tugraz.at 2 Institute for Computer Graphics
Semantic Segmentation of Street-Side Images Michal Recky 1, Franz Leberl 2 1 Institute for Computer Graphics and Vision Graz University of Technology recky@icg.tugraz.at 2 Institute for Computer Graphics
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
11. Image Data Analytics. Jacobs University Visualization and Computer Graphics Lab
 11. Image Data Analytics Motivation Images (and even videos) have become a popular data format for storing information digitally. Data Analytics 377 Motivation Traditionally, scientific and medical imaging
11. Image Data Analytics Motivation Images (and even videos) have become a popular data format for storing information digitally. Data Analytics 377 Motivation Traditionally, scientific and medical imaging
Wavelet Applications. Texture analysis&synthesis. Gloria Menegaz 1
 Wavelet Applications Texture analysis&synthesis Gloria Menegaz 1 Wavelet based IP Compression and Coding The good approximation properties of wavelets allow to represent reasonably smooth signals with
Wavelet Applications Texture analysis&synthesis Gloria Menegaz 1 Wavelet based IP Compression and Coding The good approximation properties of wavelets allow to represent reasonably smooth signals with
What is Computer Vision?
 Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
SkyFinder: Attribute-based Sky Image Search
 SkyFinder: Attribute-based Sky Image Search SIGGRAPH 2009 Litian Tao, Lu Yuan, Jian Sun Kim, Wook 2016. 1. 12 Abstract Interactive search system of over a half million sky images Automatically extracted
SkyFinder: Attribute-based Sky Image Search SIGGRAPH 2009 Litian Tao, Lu Yuan, Jian Sun Kim, Wook 2016. 1. 12 Abstract Interactive search system of over a half million sky images Automatically extracted
Seminar Heidelberg University
 Seminar Heidelberg University Mobile Human Detection Systems Pedestrian Detection by Stereo Vision on Mobile Robots Philip Mayer Matrikelnummer: 3300646 Motivation Fig.1: Pedestrians Within Bounding Box
Seminar Heidelberg University Mobile Human Detection Systems Pedestrian Detection by Stereo Vision on Mobile Robots Philip Mayer Matrikelnummer: 3300646 Motivation Fig.1: Pedestrians Within Bounding Box
Su et al. Shape Descriptors - III
 Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Using Machine Learning for Classification of Cancer Cells
 Using Machine Learning for Classification of Cancer Cells Camille Biscarrat University of California, Berkeley I Introduction Cell screening is a commonly used technique in the development of new drugs.
Using Machine Learning for Classification of Cancer Cells Camille Biscarrat University of California, Berkeley I Introduction Cell screening is a commonly used technique in the development of new drugs.
INTERNATIONAL JOURNAL OF PURE AND APPLIED RESEARCH IN ENGINEERING AND TECHNOLOGY
 INTERNATIONAL JOURNAL OF PURE AND APPLIED RESEARCH IN ENGINEERING AND TECHNOLOGY A PATH FOR HORIZING YOUR INNOVATIVE WORK REVIEW ON CONTENT BASED IMAGE RETRIEVAL BY USING VISUAL SEARCH RANKING MS. PRAGATI
INTERNATIONAL JOURNAL OF PURE AND APPLIED RESEARCH IN ENGINEERING AND TECHNOLOGY A PATH FOR HORIZING YOUR INNOVATIVE WORK REVIEW ON CONTENT BASED IMAGE RETRIEVAL BY USING VISUAL SEARCH RANKING MS. PRAGATI
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Recognizing hand-drawn images using shape context
 Recognizing hand-drawn images using shape context Gyozo Gidofalvi Department of Computer Science and Engineering University of California, San Diego La Jolla, CA 92037 gyozo@cs.ucsd.edu Abstract The objective
Recognizing hand-drawn images using shape context Gyozo Gidofalvi Department of Computer Science and Engineering University of California, San Diego La Jolla, CA 92037 gyozo@cs.ucsd.edu Abstract The objective
Last week. Multi-Frame Structure from Motion: Multi-View Stereo. Unknown camera viewpoints
 Last week Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints Last week PCA Today Recognition Today Recognition Recognition problems What is it? Object detection Who is it? Recognizing
Last week Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints Last week PCA Today Recognition Today Recognition Recognition problems What is it? Object detection Who is it? Recognizing
Using the Kolmogorov-Smirnov Test for Image Segmentation
 Using the Kolmogorov-Smirnov Test for Image Segmentation Yong Jae Lee CS395T Computational Statistics Final Project Report May 6th, 2009 I. INTRODUCTION Image segmentation is a fundamental task in computer
Using the Kolmogorov-Smirnov Test for Image Segmentation Yong Jae Lee CS395T Computational Statistics Final Project Report May 6th, 2009 I. INTRODUCTION Image segmentation is a fundamental task in computer
An Efficient Semantic Image Retrieval based on Color and Texture Features and Data Mining Techniques
 An Efficient Semantic Image Retrieval based on Color and Texture Features and Data Mining Techniques Doaa M. Alebiary Department of computer Science, Faculty of computers and informatics Benha University
An Efficient Semantic Image Retrieval based on Color and Texture Features and Data Mining Techniques Doaa M. Alebiary Department of computer Science, Faculty of computers and informatics Benha University
Does the Brain do Inverse Graphics?
 Does the Brain do Inverse Graphics? Geoffrey Hinton, Alex Krizhevsky, Navdeep Jaitly, Tijmen Tieleman & Yichuan Tang Department of Computer Science University of Toronto The representation used by the
Does the Brain do Inverse Graphics? Geoffrey Hinton, Alex Krizhevsky, Navdeep Jaitly, Tijmen Tieleman & Yichuan Tang Department of Computer Science University of Toronto The representation used by the
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Color, Texture and Segmentation. CSE 455 Linda Shapiro
 Color, Texture and Segmentation CSE 455 Linda Shapiro Color Spaces RGB HSI/HSV CIE L*a*b YIQ and more standard for cameras hue, saturation, intensity intensity plus 2 color channels color TVs, Y is intensity
Color, Texture and Segmentation CSE 455 Linda Shapiro Color Spaces RGB HSI/HSV CIE L*a*b YIQ and more standard for cameras hue, saturation, intensity intensity plus 2 color channels color TVs, Y is intensity
A Miniature-Based Image Retrieval System
 A Miniature-Based Image Retrieval System Md. Saiful Islam 1 and Md. Haider Ali 2 Institute of Information Technology 1, Dept. of Computer Science and Engineering 2, University of Dhaka 1, 2, Dhaka-1000,
A Miniature-Based Image Retrieval System Md. Saiful Islam 1 and Md. Haider Ali 2 Institute of Information Technology 1, Dept. of Computer Science and Engineering 2, University of Dhaka 1, 2, Dhaka-1000,
Machine learning Pattern recognition. Classification/Clustering GW Chapter 12 (some concepts) Textures
 Textures") Machine learning Pattern recognition Classification/Clustering GW Chapter 12 (some concepts) Textures Patterns and pattern classes Pattern: arrangement of descriptors Descriptors: features Patten class:
Machine learning Pattern recognition Classification/Clustering GW Chapter 12 (some concepts) Textures Patterns and pattern classes Pattern: arrangement of descriptors Descriptors: features Patten class:
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
VC 11/12 T14 Visual Feature Extraction
 VC 11/12 T14 Visual Feature Extraction Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Feature Vectors Colour Texture
VC 11/12 T14 Visual Feature Extraction Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Feature Vectors Colour Texture
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
CS 534: Computer Vision Texture
 CS 534: Computer Vision Texture Ahmed Elgammal Dept of Computer Science CS 534 Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrices for texture Spatial Filtering
CS 534: Computer Vision Texture Ahmed Elgammal Dept of Computer Science CS 534 Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrices for texture Spatial Filtering
Gene Clustering & Classification
 BINF, Introduction to Computational Biology Gene Clustering & Classification Young-Rae Cho Associate Professor Department of Computer Science Baylor University Overview Introduction to Gene Clustering
BINF, Introduction to Computational Biology Gene Clustering & Classification Young-Rae Cho Associate Professor Department of Computer Science Baylor University Overview Introduction to Gene Clustering
Video Texture. A.A. Efros
 Video Texture A.A. Efros 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Weather Forecasting for Dummies Let s predict weather: Given today s weather only, we want to know tomorrow s Suppose
Video Texture A.A. Efros 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Weather Forecasting for Dummies Let s predict weather: Given today s weather only, we want to know tomorrow s Suppose
Snakes, level sets and graphcuts. (Deformable models)
") INSTITUTE OF INFORMATION AND COMMUNICATION TECHNOLOGIES BULGARIAN ACADEMY OF SCIENCE Snakes, level sets and graphcuts (Deformable models) Centro de Visión por Computador, Departament de Matemàtica Aplicada
INSTITUTE OF INFORMATION AND COMMUNICATION TECHNOLOGIES BULGARIAN ACADEMY OF SCIENCE Snakes, level sets and graphcuts (Deformable models) Centro de Visión por Computador, Departament de Matemàtica Aplicada
Finding 2D Shapes and the Hough Transform
 CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the