C. Premsai 1, Prof. A. Kavya 2 School of Computer Science, School of Computer Science Engineering, Engineering VIT Chennai, VIT Chennai
|
|
|
- Ashlyn Robbins
- 6 years ago
- Views:
Transcription
1 Traffic Sign Detection Via Graph-Based Ranking and Segmentation Algorithm C. Premsai 1, Prof. A. Kavya 2 School of Computer Science, School of Computer Science Engineering, Engineering VIT Chennai, VIT Chennai Abstract: The majority of the existing traffic sign detection systems to utilize color or shape information, but the methods of remain limited in regard to detecting and segmenting traffic signs from a complex background. In this paper, we propose a novel graph-based traffic sign detection for an approach that consists of a saliency measure stage, a graph-based ranking stage, a multithreshold segmentation stage. Because the graph-based ranking algorithm with their specified color and saliency combines the information of color, saliency, spatial, and contextual relationship of the nodes, and more discriminative and robust than the other systems in terms of their handling various illumination conditions, and shape rotations, and scale changes from traffic sign images. Index Terms: Classification, detection, road sign, support vector machine (SVMs). I. INTRODUCTION Currently, more and more intelligent transportation systems are developed for assisting drivers. Traffic sign recognition (TSR) is extremely important for safe and careful driving, as not only can this system inform the driver of the conditions of the road, but can also support the driver during the tedious task of remembering each of the many types of traffic signs. Some of the traffic sign information may sometimes be extracted from the GPS navigation data, but it is always neither complete nor up-to-date. Moreover, temporary speed limits for road works, as well as variable speed limits, are by registration not included in predefined digital cartographic data. Therefore, a visual real time TSR system is a mandatory complement to GPS systems for designing advanced driving assistance systems. Traffic signs are designed using specific shapes and colors, which are highly salient and visible from the background against which they are set, enhancing their visibility to drivers. In-depth study of traffic sign datasets allows us to observe some common characteristics of traffic signs. Traffic signs are designed using specific shapes and colors, are highly salient and visible from the background which they are set, enhancing their visibility to drivers. In-depth study of traffic sign datasets allows us to observe Some common characteristics of traffic signs. Traffic signs are designed with specified colors (i.e., red, Blue, yellow, or white). Traffic signs are highly salient. The image intensities in traffic sign regions present appearance coherence. In this paper, we propose a novel graph-based ranking and segmentation approach to detect salient regions, with specified colors, as traffic sign candidate regions. The proposed approach combines information pertaining to the color, saliency, spatial, and contextual relationship of nodes for traffic sign detection, making it more discriminative and robust than other methods in addressing various illumination conditions, shape rotations, and scale changes of traffic sign images. A. Scope of The Project In this paper, we propose a novel graph-based ranking and segmentation approach to detect salient regions, with specified colors, as traffic sign candidate regions. The proposed approach combines information pertaining to the color, saliency, spatial, and contextual relationship of nodes for traffic sign detection, making it more discriminative and robust than other methods in addressing various illumination conditions, shape rotations, and scale changes of traffic sign images. These can be indicating to the driver for the presence of a sign in advance, so that some incorrect human decisions are could be avoided. B. Problem Statement The existing system have several problems: The performance of color-based traffic sign detection approach is often reduced in setting with adverse weather conditions, such as strong illumination or poor lighting.when the traffic signs have been rotated or IJRASET: All Rights are Reserved 897

.")
2 occluded, or have undergone affine transformations, the performance of shape-based traffic sign detection method is often reduced.local features and the sliding window paradigm-based traffic sign detection and recognition method score a large number of windows in a test image using a classifier. Thus, computational complexity and the number of false alarms increase. C. Existing System This paper can a presents an automatic road-sign detection for a recognition system based on their support vector machines (SVMs). In automatic traffic-sign they maintenance a visual driver through a assistance system, and road-sign detection and an recognition for two of the most important functions. Our system is capable to detect and recognize a circular, rectangular, triangular, and octagonal signs, and then hence covers all the existing Spanish traffic-sign shapes. The road signs are provide drivers for important information and help them to drive for more safely and more easily by guiding to warning them and regulating their actions. Then proposed recognition system is based on their generalization properties of support vector machine. Then system consists of three stages: 1) Segmentation according to their colour of pixel; 2) Traffic-sign detection may be shape classification using linear SVM; 3) Content recognition is based on Gaussian-kernel SVs. Because of their used segmentation stage by red, blue, yellow, white, or combinations of these colours, and all traffic signs can be detected through, and some of them can be detected by their colours. Results are show a high success rate for an very low amount of false positives and final recognition stage. These results, we can conclude that the proposed algorithm is an invariant to their translation, rotation, scale, and, many situations, even in partial occlusions. Nevertheless, there are some works where thresholding is not applied directly using a specific color space. The thresholding by looking for chromatic and achromatic colors is applied by a simple vector filter (SVF). The SVF has characteristics that can extract the specific color and eliminate all the outlines at the same time. Normalized error between the luminance component and RGB components is obtained, computing an energy function in order to identify the inner area of the sign. We learned the sign similarity function from the pairs of images cropped from the individual frames of real-life video sequences. These sequences were captured from a moving vehicle in cluttered Japanese street scenes. The quality of the input images varied from very good (short distance) from the camera, good illumination, bright colors, and good contrast) to very poor (adverse illumination, pale colors, and motion blur). D. Over All Diagrams IJRASET: All Rights are Reserved 898


3 E. Proposed System The majority of an existing traffic sign detection systems can utilize a color or shape information, but we have methods remain limited in a regard to detecting and to segmenting a traffic signs from a complex background. In this paper, we have proposed a novel graph-based traffic sign detection approach through consists of a saliency measure stage, then graph-based ranking stage, and multithreshold segmentation stage. The different color spaces have been used to segment the traffic signs in outdoor images. The difficulties that we encounter in this image segmentation are related to illumination changes and possible deterioration of the signs. We have to believe that the saturation components are HIS space are sufficient to their isolate traffic signs in a scene working with fixed thresholds. The graph-based ranking algorithm with a specified color and saliency for combines the information of color and saliency, spatial and contextual relationship of their nodes; it is more discriminative and the robust of other systems in terms of their handling various illumination weather conditions, shape rotations, then scale changes from traffic sign images. can only provide a result of either 0 or 1 for each pixel to describe whether or not it is in the traffic sign region. In this paper, we aim at solving the problems of the color-based traffic sign detection method, and propose an algorithm to combine the information of the color, saliency, spatial, and contextual Fig.2. Flow of proposed traffic sign detection system. (a)input image. (b) Graph design. (c) Ranking results with specified colors. (d) Segmentation results. (e) Final results of traffic sign detection system. IJRASET: All Rights are Reserved 899
 The performance of color-based traffic sign detection approach is often reduced in weather conditions.")
4 F. Limitations of the related traffic sign 1) Detection some limitations of the related studies are presented as follow. a) The performance of color-based traffic sign detection approach is often reduced in weather conditions. b) When the traffic signs have been rotated or occluded, or have undergone affine transformations, the performance of shape-based traffic sign detection method is often reduced. c) Local features and the sliding window paradigm-based traffic sign detection and recognition method score a large number of windows in a test image using a classifier. Thus, computational complexity and the number of false alarms increase. II. CONTRIBUTION In the detection stage, the majority of the systems utilize color information as a method for segmenting images. However, fixing thresholds for a traffic sign detection system in outdoor environments is the problem of the color thresholding method. As shown in Fig. 1, if the range of thresholds is large, the number of false alarms increase, otherwise, the number of misses increase. Furthermore, the color thresholding method relationship of nodes for traffic sign detection. Even if we set a wide range of thresholds, false alarms can also be reduced by combining the information of saliency, spatial, or contextual information. Furthermore, a score between 0 and 1can be given for each node to describe how likely it is to be a part of a traffic sign. In this paper, graph-based ranking and segmentation algorithms are proposed, which consist of a saliency measure stage, a graph-based ranking stage, and a multithreshold segmentation stage. First, we design a graph to represent an image. We then propose a ranking algorithm to exploit the intrinsic manifold structure of the nodes of the graph, and give each node a ranking score according to its saliency, coherence, and similarity with the specified colors. Finally, we propose a multithreshold segmentation approach to segment traffic sign candidate regions. The key contributions of our algorithm areas follow. A novel graph-based saliency measure algorithm for traffic sign detection is proposed. We provide a novel framework that combines the information of the color, saliency, spatial, and contextual relationship of their nodes. It is more and more discriminative and a robust color for other systems in terms of handling various illumination conditions, shape rotations, and scale changes from traffic sign images. The multithreshold segmentation algorithm focuses on all the nodes with a nonzero ranking score, which can effectively solve problems such as complex background, occlusion, various illumination conditions, and so on. There are some works where thresholding is not applied directly using a specific color space. Thresholding by looking for chromatic and achromatic colors is applied by a simple vector filter (SVF). The SVF has characteristics that can extract the specific color and eliminate all the outlines at the same time. Normalized error between the luminance component and RGB components is obtained. A. Graph-Based Ranking and Segmentation Algorithm for Traffic Sign Detection Super pixels are generated by the simple linear iterative clustering (SLIC) algorithm, which clusters pixels in the combined fivedimensional color and image plane space to efficiently generate compact, nearly uniform super pixels. The flow of our proposed traffic sign detection system is illustrated IJRASET: All Rights are Reserved 900
 (c) is the examples of 4000, 3000, and 2000 super pixels generated, respectively.")
5 Fig. 3. Examples of super pixels generated with different numbers. Example of (a) 4000, (b) 3000, and(c) 2000 super pixels. Fig. 3, where Fig. 3(a) (c) is the examples of 4000, 3000, and 2000 super pixels generated, respectively. Indicated that a traffic sign is the sum of a color border, a color or achromatic background, and an inner component. To detect small traffic signs, the system must guarantee that the color border of the traffic signs is segmented into independent super pixels. Therefore, in this paper we select 4000 super pixels. B. Traffic Sign Candidate Regions Segmentation Based on the ranking algorithm, the system gives a ranking score for each node, which indicates how likely it is to be a part of a traffic sign. To segment the traffic sign regions from the results of the ranking algorithm, we propose a multithreshold segmentation algorithm. Each image of ranking result is binarized at a number of different threshold levels, and the connected components at each level are found. Fig. 8 shows the different threshold levels for an example image with the connected components colored. Each connected component Fig.4. Process of multithreshold segmentation algorithm can be described as Lzi, which is the ith connected component at level z. Here, i [1, 2,...,Nz] and t [1, 2,..., Z].To increase the speed, we threshold only at an appropriate range of values rather than at every possible value, the thresholds are set to 0.6, 0.4, 0.2, and Furthermore, we remove the segments with areas that are either too large or small, and cut some segments whose heights are twice as longer as the width. IJRASET: All Rights are Reserved 901

6 C. Traffic Sign Classification Based On SVMS SVM and the library LibLinear in our system. The classification stage input is a vector of the HOG descriptor, which Dalal and Triggs proposed for pedestrian detection. On the basis of the gradients of the images, we calculate the different weighted and normalized histograms, overlapping cells with the size of pixels, a block size of 4 4 cells, and an orientation resolution of 8. To classify the decision region, all feature vectors of a specific class are grouped together against all vectors corresponding to the remainder of the classes (including noisy objects), according to the one-versus-all classification algorithm. SVM multiclass classification constructs SVM models. The ith SVM is trained with an all the examples of ith class with a positive labels, and all the other examples of negative labels. In this paper, the cost of a regularization parameter in C is set of 1.2 by the producing through highest cross-correlation accuracy. III. EXPERIMENTAL RESULTS A. Graph Design Each node is a super pixel generated by the simple linear iterative clustering (SLIC) algorithm. To exploit the spatial relationship, we adopted a k-regular graph, which is a graph with vertices of degree k. By extending the scope of node connection with the same degree of k, we effectively utilize the local smoothness cue. Each node is not only connected to its neighbouring nodes, but also connected to the nodes sharing common boundaries with these neighbouring nodes. Fig. Examples of super pixels belongings to traffic sign The nodes on the image boundary as background seeds, then constructed its neighboring nodes, but also connected to the nodes sharing common boundaries with these neighboring nodes. B. Saliency Our goal is to learn a ranking function, which defines the relevance between the nodes of the graph and ranges of the traffic sign colors. The core idea of manifold ranking is to rank the nodes with respect to the intrinsic structure collectively. By taking the relevance between the nodes of the graph and ranges of the traffic sign colors, manifold ranking assigns each node a relative ranking score, instead of an absolute pair wise similarity as traditional ways. C. Segmentation Based on the ranking algorithm, the system gives a ranking score for each node, which indicates how likely it is to be a part of a traffic sign. To segment the traffic sign regions from the results of the ranking algorithm, we propose a multithreshold segmentation algorithm. Each image of ranking result is binarized at a number of different threshold levels, and the connected components at each level are found. IJRASET: All Rights are Reserved 902

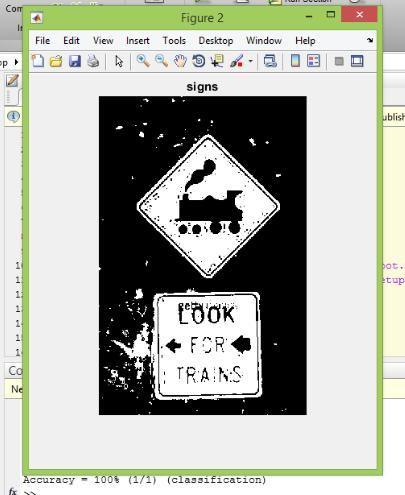
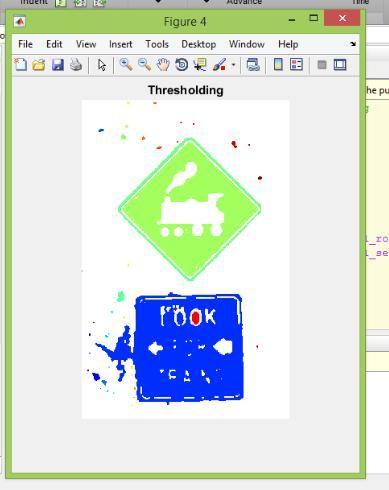
7 Fig;-Graph design Fig:-Signs Fig:-Thresholding IJRASET: All Rights are Reserved 903

8 Fig:-support vector machine detected output IV. CONCLUSION In this paper, we described a novel graph-based traffic sign detection approach, which consisted of a saliency measure stage, a graph-based ranking stage, and a multithreshold segmentation stage. We presented a graph with superpixels as nodes for an image, and gave the nodes ranking scores, according to their spatial structures, saliency, contextual relationship of nodes and similarities with the specified colours. We could then segment traffic sign candidate regions with the specified colours from a complex background, on the basis of the multithreshold segmentation algorithm. REFERENCES [1] X. W. Gao, L. Podladchikova, D. Shaposhnikov, K. Hong, andn. Shevtsov, Recognition of traffic signs based on their colour andshape features extracted using human vision models, J. Vis. Commun.Image Represent., vol. 17, no. 4, pp , [2] S. Maldonado-Bascón, S. Lafuente-Arroyo, P. Gil-Jiménez,H. Gómez-Moreno, and F. López-Ferreras, Road-sign detectionand recognition based on the SVMs, IEEE Trans Intell Transp. Syst., vol. 8 no. 2, pp , Jun [3] S. Maldonado-Bascón, J. Acevedo-Rodríguez, S. Lafuente-Arroyo,A. Fernndez-Caballero, and F. López-Ferreras, An optimization on pictogramidentification for the [4] road-sign recognition task using SVMs, Comput. Vis. Image Understand., vol. 114, no. 3, pp , 2010.M. S. Prieto and A. R. Allen, Using selforganising maps in the detectionand recognition of road signs, Image Vis. Comput., vol. 27, no. 6,pp , 2009 [5] G. Loy, Fast shape-based on the road sign detection for a driver assistance system, in Proc. IEEE. Conf Robots Syst., vol. 1. Sendai, Japan, 2004, pp [6] S. Houben, A single target voting scheme for traffic sign detection, in Proc. IEEE Intell. Veh. Symp. (IV), Baden-Baden, Germany, 2011, pp IJRASET: All Rights are Reserved 904
TRAFFIC SIGN RECOGNITION USING MSER AND RANDOM FORESTS. Jack Greenhalgh and Majid Mirmehdi
 20th European Signal Processing Conference (EUSIPCO 2012) Bucharest, Romania, August 27-31, 2012 TRAFFIC SIGN RECOGNITION USING MSER AND RANDOM FORESTS Jack Greenhalgh and Majid Mirmehdi Visual Information
20th European Signal Processing Conference (EUSIPCO 2012) Bucharest, Romania, August 27-31, 2012 TRAFFIC SIGN RECOGNITION USING MSER AND RANDOM FORESTS Jack Greenhalgh and Majid Mirmehdi Visual Information
Road-Sign Detection and Recognition Based on Support Vector Machines. Maldonado-Bascon et al. et al. Presented by Dara Nyknahad ECG 789
 Road-Sign Detection and Recognition Based on Support Vector Machines Maldonado-Bascon et al. et al. Presented by Dara Nyknahad ECG 789 Outline Introduction Support Vector Machine (SVM) Algorithm Results
Road-Sign Detection and Recognition Based on Support Vector Machines Maldonado-Bascon et al. et al. Presented by Dara Nyknahad ECG 789 Outline Introduction Support Vector Machine (SVM) Algorithm Results
Two Algorithms for Detection of Mutually Occluding Traffic Signs
 Two Algorithms for Detection of Mutually Occluding Traffic Signs Thanh Bui-Minh, Ovidiu Ghita, Paul F. Whelan, Senior Member, IEEE, Trang Hoang, Vinh Quang Truong Abstract The robust identification of
Two Algorithms for Detection of Mutually Occluding Traffic Signs Thanh Bui-Minh, Ovidiu Ghita, Paul F. Whelan, Senior Member, IEEE, Trang Hoang, Vinh Quang Truong Abstract The robust identification of
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation
 Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Traffic sign shape classification evaluation II: FFT applied to the signature of Blobs
 Traffic sign shape classification evaluation II: FFT applied to the signature of Blobs P. Gil-Jiménez, S. Lafuente-Arroyo, H. Gómez-Moreno, F. López-Ferreras and S. Maldonado-Bascón Dpto. de Teoría de
Traffic sign shape classification evaluation II: FFT applied to the signature of Blobs P. Gil-Jiménez, S. Lafuente-Arroyo, H. Gómez-Moreno, F. López-Ferreras and S. Maldonado-Bascón Dpto. de Teoría de
THE SPEED-LIMIT SIGN DETECTION AND RECOGNITION SYSTEM
 THE SPEED-LIMIT SIGN DETECTION AND RECOGNITION SYSTEM Kuo-Hsin Tu ( 塗國星 ), Chiou-Shann Fuh ( 傅楸善 ) Dept. of Computer Science and Information Engineering, National Taiwan University, Taiwan E-mail: p04922004@csie.ntu.edu.tw,
THE SPEED-LIMIT SIGN DETECTION AND RECOGNITION SYSTEM Kuo-Hsin Tu ( 塗國星 ), Chiou-Shann Fuh ( 傅楸善 ) Dept. of Computer Science and Information Engineering, National Taiwan University, Taiwan E-mail: p04922004@csie.ntu.edu.tw,
A Robust Algorithm for Detection and Classification of Traffic Signs in Video Data
 A Robust Algorithm for Detection and Classification of Traffic Signs in Video Data Thanh Bui-Minh, Ovidiu Ghita, Paul F. Whelan, Senior Member, IEEE, and Trang Hoang Abstract The accurate identification
A Robust Algorithm for Detection and Classification of Traffic Signs in Video Data Thanh Bui-Minh, Ovidiu Ghita, Paul F. Whelan, Senior Member, IEEE, and Trang Hoang Abstract The accurate identification
AUGMENTING GPS SPEED LIMIT MONITORING WITH ROAD SIDE VISUAL INFORMATION. M.L. Eichner*, T.P. Breckon
 AUGMENTING GPS SPEED LIMIT MONITORING WITH ROAD SIDE VISUAL INFORMATION M.L. Eichner*, T.P. Breckon * Cranfield University, UK, marcin.eichner@cranfield.ac.uk Cranfield University, UK, toby.breckon@cranfield.ac.uk
AUGMENTING GPS SPEED LIMIT MONITORING WITH ROAD SIDE VISUAL INFORMATION M.L. Eichner*, T.P. Breckon * Cranfield University, UK, marcin.eichner@cranfield.ac.uk Cranfield University, UK, toby.breckon@cranfield.ac.uk
Traffic Signs Recognition using HP and HOG Descriptors Combined to MLP and SVM Classifiers
 Traffic Signs Recognition using HP and HOG Descriptors Combined to MLP and SVM Classifiers A. Salhi, B. Minaoui, M. Fakir, H. Chakib, H. Grimech Faculty of science and Technology Sultan Moulay Slimane
Traffic Signs Recognition using HP and HOG Descriptors Combined to MLP and SVM Classifiers A. Salhi, B. Minaoui, M. Fakir, H. Chakib, H. Grimech Faculty of science and Technology Sultan Moulay Slimane
TRAFFIC SIGN DETECTION AND RECOGNITION IN DRIVER SUPPORT SYSTEM FOR SAFETY PRECAUTION
 VOL. 10, NO. 5, MARCH 015 ISSN 1819-6608 006-015 Asian Research Publishing Network (ARPN). All rights reserved. TRAFFIC SIGN DETECTION AND RECOGNITION IN DRIVER SUPPORT SYSTEM FOR SAFETY PRECAUTION Y.
VOL. 10, NO. 5, MARCH 015 ISSN 1819-6608 006-015 Asian Research Publishing Network (ARPN). All rights reserved. TRAFFIC SIGN DETECTION AND RECOGNITION IN DRIVER SUPPORT SYSTEM FOR SAFETY PRECAUTION Y.
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
Bus Detection and recognition for visually impaired people
 Bus Detection and recognition for visually impaired people Hangrong Pan, Chucai Yi, and Yingli Tian The City College of New York The Graduate Center The City University of New York MAP4VIP Outline Motivation
Bus Detection and recognition for visually impaired people Hangrong Pan, Chucai Yi, and Yingli Tian The City College of New York The Graduate Center The City University of New York MAP4VIP Outline Motivation
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
REAL-TIME ROAD SIGNS RECOGNITION USING MOBILE GPU
 High-Performance Сomputing REAL-TIME ROAD SIGNS RECOGNITION USING MOBILE GPU P.Y. Yakimov Samara National Research University, Samara, Russia Abstract. This article shows an effective implementation of
High-Performance Сomputing REAL-TIME ROAD SIGNS RECOGNITION USING MOBILE GPU P.Y. Yakimov Samara National Research University, Samara, Russia Abstract. This article shows an effective implementation of
Traffic Sign Classification using K-d trees and Random Forests
 Traffic Sign Classification using K-d trees and Random Forests Fatin Zaklouta and Bogdan Stanciulescu and Omar Hamdoun Abstract In this paper, we evaluate the performance of K-d trees and Random Forests
Traffic Sign Classification using K-d trees and Random Forests Fatin Zaklouta and Bogdan Stanciulescu and Omar Hamdoun Abstract In this paper, we evaluate the performance of K-d trees and Random Forests
Study on road sign recognition in LabVIEW
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Study on road sign recognition in LabVIEW To cite this article: M Panoiu et al 2016 IOP Conf. Ser.: Mater. Sci. Eng. 106 012009
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Study on road sign recognition in LabVIEW To cite this article: M Panoiu et al 2016 IOP Conf. Ser.: Mater. Sci. Eng. 106 012009
Published by: PIONEER RESEARCH & DEVELOPMENT GROUP(
 Image Based Detection and Recognition of Road Signs Mrs.S.Sathiya 1, Dr.M.Balasubramanian 2, R.Sivaranjini 3 1 Department of Computer Science, Annamalai university Chidambaram, Tamilnadu, India Abstract
Image Based Detection and Recognition of Road Signs Mrs.S.Sathiya 1, Dr.M.Balasubramanian 2, R.Sivaranjini 3 1 Department of Computer Science, Annamalai university Chidambaram, Tamilnadu, India Abstract
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
MULTI ORIENTATION PERFORMANCE OF FEATURE EXTRACTION FOR HUMAN HEAD RECOGNITION
 MULTI ORIENTATION PERFORMANCE OF FEATURE EXTRACTION FOR HUMAN HEAD RECOGNITION Panca Mudjirahardjo, Rahmadwati, Nanang Sulistiyanto and R. Arief Setyawan Department of Electrical Engineering, Faculty of
MULTI ORIENTATION PERFORMANCE OF FEATURE EXTRACTION FOR HUMAN HEAD RECOGNITION Panca Mudjirahardjo, Rahmadwati, Nanang Sulistiyanto and R. Arief Setyawan Department of Electrical Engineering, Faculty of
Human Motion Detection and Tracking for Video Surveillance
 Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Object detection using non-redundant local Binary Patterns
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
Visibility Estimation of Road Signs Considering Detect-ability Factors for Driver Assistance Systems
 WSEAS TRANSACTIONS on SIGNA PROCESSING Visibility Estimation of Road Signs Considering Detect-ability Factors for Driver Assistance Systems JAFAR J. AUKHAIT Communications, Electronics and Computer Engineering
WSEAS TRANSACTIONS on SIGNA PROCESSING Visibility Estimation of Road Signs Considering Detect-ability Factors for Driver Assistance Systems JAFAR J. AUKHAIT Communications, Electronics and Computer Engineering
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
TRAFFIC SIGN RECOGNITION USING A MULTI-TASK CONVOLUTIONAL NEURAL NETWORK
 TRAFFIC SIGN RECOGNITION USING A MULTI-TASK CONVOLUTIONAL NEURAL NETWORK Dr. S.V. Shinde Arshiya Sayyad Uzma Shaikh Department of IT Department of IT Department of IT Pimpri Chinchwad college of Engineering
TRAFFIC SIGN RECOGNITION USING A MULTI-TASK CONVOLUTIONAL NEURAL NETWORK Dr. S.V. Shinde Arshiya Sayyad Uzma Shaikh Department of IT Department of IT Department of IT Pimpri Chinchwad college of Engineering
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Human detection using histogram of oriented gradients. Srikumar Ramalingam School of Computing University of Utah
 Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Object Tracking using HOG and SVM
 Object Tracking using HOG and SVM Siji Joseph #1, Arun Pradeep #2 Electronics and Communication Engineering Axis College of Engineering and Technology, Ambanoly, Thrissur, India Abstract Object detection
Object Tracking using HOG and SVM Siji Joseph #1, Arun Pradeep #2 Electronics and Communication Engineering Axis College of Engineering and Technology, Ambanoly, Thrissur, India Abstract Object detection
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach
 Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Classification and Detection in Images. D.A. Forsyth
 Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Change detection using joint intensity histogram
 Change detection using joint intensity histogram Yasuyo Kita National Institute of Advanced Industrial Science and Technology (AIST) Information Technology Research Institute AIST Tsukuba Central 2, 1-1-1
Change detection using joint intensity histogram Yasuyo Kita National Institute of Advanced Industrial Science and Technology (AIST) Information Technology Research Institute AIST Tsukuba Central 2, 1-1-1
Road signs shapes detection based on Sobel phase analysis
 Road signs shapes detection based on Sobel phase analysis Elena Cardarelli, Paolo Medici, Pier Paolo Porta, and VisLab Dipartimento di Ingegneria dell Informazione Università degli Studi di Parma, ITALY
Road signs shapes detection based on Sobel phase analysis Elena Cardarelli, Paolo Medici, Pier Paolo Porta, and VisLab Dipartimento di Ingegneria dell Informazione Università degli Studi di Parma, ITALY
CORRELATION BASED CAR NUMBER PLATE EXTRACTION SYSTEM
 CORRELATION BASED CAR NUMBER PLATE EXTRACTION SYSTEM 1 PHYO THET KHIN, 2 LAI LAI WIN KYI 1,2 Department of Information Technology, Mandalay Technological University The Republic of the Union of Myanmar
CORRELATION BASED CAR NUMBER PLATE EXTRACTION SYSTEM 1 PHYO THET KHIN, 2 LAI LAI WIN KYI 1,2 Department of Information Technology, Mandalay Technological University The Republic of the Union of Myanmar
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Implementation of Optical Flow, Sliding Window and SVM for Vehicle Detection and Tracking
 Implementation of Optical Flow, Sliding Window and SVM for Vehicle Detection and Tracking Mohammad Baji, Dr. I. SantiPrabha 2 M. Tech scholar, Department of E.C.E,U.C.E.K,Jawaharlal Nehru Technological
Implementation of Optical Flow, Sliding Window and SVM for Vehicle Detection and Tracking Mohammad Baji, Dr. I. SantiPrabha 2 M. Tech scholar, Department of E.C.E,U.C.E.K,Jawaharlal Nehru Technological
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Region-based Segmentation and Object Detection
 Region-based Segmentation and Object Detection Stephen Gould Tianshi Gao Daphne Koller Presented at NIPS 2009 Discussion and Slides by Eric Wang April 23, 2010 Outline Introduction Model Overview Model
Region-based Segmentation and Object Detection Stephen Gould Tianshi Gao Daphne Koller Presented at NIPS 2009 Discussion and Slides by Eric Wang April 23, 2010 Outline Introduction Model Overview Model
Car Detecting Method using high Resolution images
 Car Detecting Method using high Resolution images Swapnil R. Dhawad Department of Electronics and Telecommunication Engineering JSPM s Rajarshi Shahu College of Engineering, Savitribai Phule Pune University,
Car Detecting Method using high Resolution images Swapnil R. Dhawad Department of Electronics and Telecommunication Engineering JSPM s Rajarshi Shahu College of Engineering, Savitribai Phule Pune University,
FAST HUMAN DETECTION USING TEMPLATE MATCHING FOR GRADIENT IMAGES AND ASC DESCRIPTORS BASED ON SUBTRACTION STEREO
 FAST HUMAN DETECTION USING TEMPLATE MATCHING FOR GRADIENT IMAGES AND ASC DESCRIPTORS BASED ON SUBTRACTION STEREO Makoto Arie, Masatoshi Shibata, Kenji Terabayashi, Alessandro Moro and Kazunori Umeda Course
FAST HUMAN DETECTION USING TEMPLATE MATCHING FOR GRADIENT IMAGES AND ASC DESCRIPTORS BASED ON SUBTRACTION STEREO Makoto Arie, Masatoshi Shibata, Kenji Terabayashi, Alessandro Moro and Kazunori Umeda Course
Computer Science Faculty, Bandar Lampung University, Bandar Lampung, Indonesia
 Application Object Detection Using Histogram of Oriented Gradient For Artificial Intelegence System Module of Nao Robot (Control System Laboratory (LSKK) Bandung Institute of Technology) A K Saputra 1.,
Application Object Detection Using Histogram of Oriented Gradient For Artificial Intelegence System Module of Nao Robot (Control System Laboratory (LSKK) Bandung Institute of Technology) A K Saputra 1.,
An Implementation on Histogram of Oriented Gradients for Human Detection
 An Implementation on Histogram of Oriented Gradients for Human Detection Cansın Yıldız Dept. of Computer Engineering Bilkent University Ankara,Turkey cansin@cs.bilkent.edu.tr Abstract I implemented a Histogram
An Implementation on Histogram of Oriented Gradients for Human Detection Cansın Yıldız Dept. of Computer Engineering Bilkent University Ankara,Turkey cansin@cs.bilkent.edu.tr Abstract I implemented a Histogram
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Real-Time Human Detection using Relational Depth Similarity Features
 Real-Time Human Detection using Relational Depth Similarity Features Sho Ikemura, Hironobu Fujiyoshi Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai, Aichi, 487-8501 Japan. si@vision.cs.chubu.ac.jp,
Real-Time Human Detection using Relational Depth Similarity Features Sho Ikemura, Hironobu Fujiyoshi Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai, Aichi, 487-8501 Japan. si@vision.cs.chubu.ac.jp,
An Approach for Reduction of Rain Streaks from a Single Image
 An Approach for Reduction of Rain Streaks from a Single Image Vijayakumar Majjagi 1, Netravati U M 2 1 4 th Semester, M. Tech, Digital Electronics, Department of Electronics and Communication G M Institute
An Approach for Reduction of Rain Streaks from a Single Image Vijayakumar Majjagi 1, Netravati U M 2 1 4 th Semester, M. Tech, Digital Electronics, Department of Electronics and Communication G M Institute
Detecting Printed and Handwritten Partial Copies of Line Drawings Embedded in Complex Backgrounds
 9 1th International Conference on Document Analysis and Recognition Detecting Printed and Handwritten Partial Copies of Line Drawings Embedded in Complex Backgrounds Weihan Sun, Koichi Kise Graduate School
9 1th International Conference on Document Analysis and Recognition Detecting Printed and Handwritten Partial Copies of Line Drawings Embedded in Complex Backgrounds Weihan Sun, Koichi Kise Graduate School
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Designing Applications that See Lecture 7: Object Recognition
 stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
TEXTURE CLASSIFICATION METHODS: A REVIEW
 TEXTURE CLASSIFICATION METHODS: A REVIEW Ms. Sonal B. Bhandare Prof. Dr. S. M. Kamalapur M.E. Student Associate Professor Deparment of Computer Engineering, Deparment of Computer Engineering, K. K. Wagh
TEXTURE CLASSIFICATION METHODS: A REVIEW Ms. Sonal B. Bhandare Prof. Dr. S. M. Kamalapur M.E. Student Associate Professor Deparment of Computer Engineering, Deparment of Computer Engineering, K. K. Wagh
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
AUTONOMOUS IMAGE EXTRACTION AND SEGMENTATION OF IMAGE USING UAV S
 AUTONOMOUS IMAGE EXTRACTION AND SEGMENTATION OF IMAGE USING UAV S Radha Krishna Rambola, Associate Professor, NMIMS University, India Akash Agrawal, Student at NMIMS University, India ABSTRACT Due to the
AUTONOMOUS IMAGE EXTRACTION AND SEGMENTATION OF IMAGE USING UAV S Radha Krishna Rambola, Associate Professor, NMIMS University, India Akash Agrawal, Student at NMIMS University, India ABSTRACT Due to the
Robot localization method based on visual features and their geometric relationship
 , pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
, pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
Human Detection. A state-of-the-art survey. Mohammad Dorgham. University of Hamburg
 Human Detection A state-of-the-art survey Mohammad Dorgham University of Hamburg Presentation outline Motivation Applications Overview of approaches (categorized) Approaches details References Motivation
Human Detection A state-of-the-art survey Mohammad Dorgham University of Hamburg Presentation outline Motivation Applications Overview of approaches (categorized) Approaches details References Motivation
Multiple-Person Tracking by Detection
 http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
Moving Object Segmentation Method Based on Motion Information Classification by X-means and Spatial Region Segmentation
 IJCSNS International Journal of Computer Science and Network Security, VOL.13 No.11, November 2013 1 Moving Object Segmentation Method Based on Motion Information Classification by X-means and Spatial
IJCSNS International Journal of Computer Science and Network Security, VOL.13 No.11, November 2013 1 Moving Object Segmentation Method Based on Motion Information Classification by X-means and Spatial
Saliency Detection in Aerial Imagery
 Saliency Detection in Aerial Imagery using Multi-scale SLIC Segmentation Samir Sahli 1, Daniel A. Lavigne 2 and Yunlong Sheng 1 1- COPL, Image Science group, Laval University, Quebec, Canada 2- Defence
Saliency Detection in Aerial Imagery using Multi-scale SLIC Segmentation Samir Sahli 1, Daniel A. Lavigne 2 and Yunlong Sheng 1 1- COPL, Image Science group, Laval University, Quebec, Canada 2- Defence
A Fast and Robust Traffic Sign Recognition
 International Journal of Innovation and Applied Studies ISSN 2028-9324 Vol. 5 No. 2 Feb. 2014, pp. 139-149 2014 Innovative Space of Scientific Research Journals http://www.issr-journals.org/ijias/ A Fast
International Journal of Innovation and Applied Studies ISSN 2028-9324 Vol. 5 No. 2 Feb. 2014, pp. 139-149 2014 Innovative Space of Scientific Research Journals http://www.issr-journals.org/ijias/ A Fast
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
DYNAMIC BACKGROUND SUBTRACTION BASED ON SPATIAL EXTENDED CENTER-SYMMETRIC LOCAL BINARY PATTERN. Gengjian Xue, Jun Sun, Li Song
 DYNAMIC BACKGROUND SUBTRACTION BASED ON SPATIAL EXTENDED CENTER-SYMMETRIC LOCAL BINARY PATTERN Gengjian Xue, Jun Sun, Li Song Institute of Image Communication and Information Processing, Shanghai Jiao
DYNAMIC BACKGROUND SUBTRACTION BASED ON SPATIAL EXTENDED CENTER-SYMMETRIC LOCAL BINARY PATTERN Gengjian Xue, Jun Sun, Li Song Institute of Image Communication and Information Processing, Shanghai Jiao
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Seminar Heidelberg University
 Seminar Heidelberg University Mobile Human Detection Systems Pedestrian Detection by Stereo Vision on Mobile Robots Philip Mayer Matrikelnummer: 3300646 Motivation Fig.1: Pedestrians Within Bounding Box
Seminar Heidelberg University Mobile Human Detection Systems Pedestrian Detection by Stereo Vision on Mobile Robots Philip Mayer Matrikelnummer: 3300646 Motivation Fig.1: Pedestrians Within Bounding Box
Object Detection Design challenges
 Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE
 PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE Hongyu Liang, Jinchen Wu, and Kaiqi Huang National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Science
PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE Hongyu Liang, Jinchen Wu, and Kaiqi Huang National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Science
Detecting motion by means of 2D and 3D information
 Detecting motion by means of 2D and 3D information Federico Tombari Stefano Mattoccia Luigi Di Stefano Fabio Tonelli Department of Electronics Computer Science and Systems (DEIS) Viale Risorgimento 2,
Detecting motion by means of 2D and 3D information Federico Tombari Stefano Mattoccia Luigi Di Stefano Fabio Tonelli Department of Electronics Computer Science and Systems (DEIS) Viale Risorgimento 2,
DPM Score Regressor for Detecting Occluded Humans from Depth Images
 DPM Score Regressor for Detecting Occluded Humans from Depth Images Tsuyoshi Usami, Hiroshi Fukui, Yuji Yamauchi, Takayoshi Yamashita and Hironobu Fujiyoshi Email: usami915@vision.cs.chubu.ac.jp Email:
DPM Score Regressor for Detecting Occluded Humans from Depth Images Tsuyoshi Usami, Hiroshi Fukui, Yuji Yamauchi, Takayoshi Yamashita and Hironobu Fujiyoshi Email: usami915@vision.cs.chubu.ac.jp Email:
Object Extraction Using Image Segmentation and Adaptive Constraint Propagation
 Object Extraction Using Image Segmentation and Adaptive Constraint Propagation 1 Rajeshwary Patel, 2 Swarndeep Saket 1 Student, 2 Assistant Professor 1 2 Department of Computer Engineering, 1 2 L. J. Institutes
Object Extraction Using Image Segmentation and Adaptive Constraint Propagation 1 Rajeshwary Patel, 2 Swarndeep Saket 1 Student, 2 Assistant Professor 1 2 Department of Computer Engineering, 1 2 L. J. Institutes
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Self Lane Assignment Using Smart Mobile Camera For Intelligent GPS Navigation and Traffic Interpretation
 For Intelligent GPS Navigation and Traffic Interpretation Tianshi Gao Stanford University tianshig@stanford.edu 1. Introduction Imagine that you are driving on the highway at 70 mph and trying to figure
For Intelligent GPS Navigation and Traffic Interpretation Tianshi Gao Stanford University tianshig@stanford.edu 1. Introduction Imagine that you are driving on the highway at 70 mph and trying to figure
Image Analysis Lecture Segmentation. Idar Dyrdal
 Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Oriented Filters for Object Recognition: an empirical study
 Oriented Filters for Object Recognition: an empirical study Jerry Jun Yokono Tomaso Poggio Center for Biological and Computational Learning, M.I.T. E5-0, 45 Carleton St., Cambridge, MA 04, USA Sony Corporation,
Oriented Filters for Object Recognition: an empirical study Jerry Jun Yokono Tomaso Poggio Center for Biological and Computational Learning, M.I.T. E5-0, 45 Carleton St., Cambridge, MA 04, USA Sony Corporation,
Traffic Signs Recognition Experiments with Transform based Traffic Sign Recognition System
 Sept. 8-10, 010, Kosice, Slovakia Traffic Signs Recognition Experiments with Transform based Traffic Sign Recognition System Martin FIFIK 1, Ján TURÁN 1, Ľuboš OVSENÍK 1 1 Department of Electronics and
Sept. 8-10, 010, Kosice, Slovakia Traffic Signs Recognition Experiments with Transform based Traffic Sign Recognition System Martin FIFIK 1, Ján TURÁN 1, Ľuboš OVSENÍK 1 1 Department of Electronics and
Supervised Sementation: Pixel Classification
 Supervised Sementation: Pixel Classification Example: A Classification Problem Categorize images of fish say, Atlantic salmon vs. Pacific salmon Use features such as length, width, lightness, fin shape
Supervised Sementation: Pixel Classification Example: A Classification Problem Categorize images of fish say, Atlantic salmon vs. Pacific salmon Use features such as length, width, lightness, fin shape
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction
 Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction Chieh-Chih Wang and Ko-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction Chieh-Chih Wang and Ko-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
COS Lecture 10 Autonomous Robot Navigation
 COS 495 - Lecture 10 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 10 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
HOG-based Pedestriant Detector Training
 HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
Fast Pedestrian Detection using Smart ROI separation and Integral image based Feature Extraction
 Fast Pedestrian Detection using Smart ROI separation and Integral image based Feature Extraction Bineesh T.R and Philomina Simon Department of Computer Science, University of Kerala Thiruvananthapuram,
Fast Pedestrian Detection using Smart ROI separation and Integral image based Feature Extraction Bineesh T.R and Philomina Simon Department of Computer Science, University of Kerala Thiruvananthapuram,
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Histograms of Oriented Gradients for Human Detection p. 1/1
 Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Fast and Stable Human Detection Using Multiple Classifiers Based on Subtraction Stereo with HOG Features
 2011 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-13, 2011, Shanghai, China Fast and Stable Human Detection Using Multiple Classifiers Based on
2011 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-13, 2011, Shanghai, China Fast and Stable Human Detection Using Multiple Classifiers Based on
Binarization of Color Character Strings in Scene Images Using K-means Clustering and Support Vector Machines
 2011 International Conference on Document Analysis and Recognition Binarization of Color Character Strings in Scene Images Using K-means Clustering and Support Vector Machines Toru Wakahara Kohei Kita
2011 International Conference on Document Analysis and Recognition Binarization of Color Character Strings in Scene Images Using K-means Clustering and Support Vector Machines Toru Wakahara Kohei Kita
Unique Journal of Engineering and Advanced Sciences Available online: Research Article
 ISSN 2348-375X Unique Journal of Engineering and Advanced Sciences Available online: www.ujconline.net Research Article DETECTION AND RECOGNITION OF THE TEXT THROUGH CONNECTED COMPONENT CLUSTERING AND
ISSN 2348-375X Unique Journal of Engineering and Advanced Sciences Available online: www.ujconline.net Research Article DETECTION AND RECOGNITION OF THE TEXT THROUGH CONNECTED COMPONENT CLUSTERING AND
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Accelerating Pattern Matching or HowMuchCanYouSlide?
 Accelerating Pattern Matching or HowMuchCanYouSlide? Ofir Pele and Michael Werman School of Computer Science and Engineering The Hebrew University of Jerusalem {ofirpele,werman}@cs.huji.ac.il Abstract.
Accelerating Pattern Matching or HowMuchCanYouSlide? Ofir Pele and Michael Werman School of Computer Science and Engineering The Hebrew University of Jerusalem {ofirpele,werman}@cs.huji.ac.il Abstract.
2 Proposed Methodology
 3rd International Conference on Multimedia Technology(ICMT 2013) Object Detection in Image with Complex Background Dong Li, Yali Li, Fei He, Shengjin Wang 1 State Key Laboratory of Intelligent Technology
3rd International Conference on Multimedia Technology(ICMT 2013) Object Detection in Image with Complex Background Dong Li, Yali Li, Fei He, Shengjin Wang 1 State Key Laboratory of Intelligent Technology
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC
 COS 429: COMPUTER VISON Segmentation human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC Reading: Chapters 14, 15 Some of the slides are credited to:
COS 429: COMPUTER VISON Segmentation human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC Reading: Chapters 14, 15 Some of the slides are credited to:
A Novel Extreme Point Selection Algorithm in SIFT
 A Novel Extreme Point Selection Algorithm in SIFT Ding Zuchun School of Electronic and Communication, South China University of Technolog Guangzhou, China zucding@gmail.com Abstract. This paper proposes
A Novel Extreme Point Selection Algorithm in SIFT Ding Zuchun School of Electronic and Communication, South China University of Technolog Guangzhou, China zucding@gmail.com Abstract. This paper proposes
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Scene Text Detection Using Machine Learning Classifiers
 601 Scene Text Detection Using Machine Learning Classifiers Nafla C.N. 1, Sneha K. 2, Divya K.P. 3 1 (Department of CSE, RCET, Akkikkvu, Thrissur) 2 (Department of CSE, RCET, Akkikkvu, Thrissur) 3 (Department
601 Scene Text Detection Using Machine Learning Classifiers Nafla C.N. 1, Sneha K. 2, Divya K.P. 3 1 (Department of CSE, RCET, Akkikkvu, Thrissur) 2 (Department of CSE, RCET, Akkikkvu, Thrissur) 3 (Department
Histogram of Oriented Gradients for Human Detection
 Histogram of Oriented Gradients for Human Detection Article by Navneet Dalal and Bill Triggs All images in presentation is taken from article Presentation by Inge Edward Halsaunet Introduction What: Detect
Histogram of Oriented Gradients for Human Detection Article by Navneet Dalal and Bill Triggs All images in presentation is taken from article Presentation by Inge Edward Halsaunet Introduction What: Detect
Vehicle Detection Using Gabor Filter
 Vehicle Detection Using Gabor Filter B.Sahayapriya 1, S.Sivakumar 2 Electronics and Communication engineering, SSIET, Coimbatore, Tamilnadu, India 1, 2 ABSTACT -On road vehicle detection is the main problem
Vehicle Detection Using Gabor Filter B.Sahayapriya 1, S.Sivakumar 2 Electronics and Communication engineering, SSIET, Coimbatore, Tamilnadu, India 1, 2 ABSTACT -On road vehicle detection is the main problem