Beyond Bags of features Spatial information & Shape models
|
|
|
- Spencer Jefferson
- 5 years ago
- Views:
Transcription
1 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba
2 Detection, recognition (so far )! Bags of features models, codebooks made based on appearance! No spatial relationships between local features! Incorporating spatial information! Edge based representations! Distance Transform, Chamfer matching! Generalized Hough Transform! Combinations of edge based and patch based! Color based representations! Holistic gist based representations 2
3 Adding spatial information Forming vocabularies from pairs of nearby features doublets or bigrams Computing bags of features on subwindows of the whole image Using codebooks to vote for object position Generative partbased models
4 Spatial pyramid representation! Extension of a bag of features! Locally orderless representation at several levels of resolution level 0 Lazebnik, Schmid & Ponce (CVPR 2006)
5 Spatial pyramid representation! Extension of a bag of features! Locally orderless representation at several levels of resolution level 0 level 1 Lazebnik, Schmid & Ponce (CVPR 2006)
6 Spatial pyramid representation! Extension of a bag of features! Locally orderless representation at several levels of resolution level 0 level 1 level 2 Lazebnik, Schmid & Ponce (CVPR 2006)

7 Scene category dataset Multiclass classification results (100 training images per class)











8 Caltech101 dataset Multiclass classification results (30 training images per class)

 is the distance")
9 Distance Transform! Given:! binary image, B, of edge and local feature locations! binary edge template, T, of shape we want to match! Let D be an array in registration with B such that D(i,j) is the distance to the nearest 1 in B.! this array is called the distance transform of B (binary image)
10 Distance Transform! Use of distance transform for template matching! Goal: Find placement of template T in D that minimizes the sum, M, of the distance transform multiplied by the pixel values in T! if T is an exact match to B at location (i,j) then M(i,j) = 0! i.e. all nonzero pixels of T will have distance 0! if the edges in B are slightly displaced from their ideal locations in T, we still get a good match using the distance transform technique
11 Computing the distance transform! Brute force, exact algorithm, is to scan B and find, for each 0, its closest 1 using the Euclidean distance.! expensive in time, and difficult to implement
12 Computing the distance transform! Two pass sequential algorithm! Initialize: set D(i,j) = 0 where B(i,j) = 1, else set D(i,j) =! Forward pass! D(i,j) = min[ D(i1,j1) 1, D(i1,j) 1, D(i1, j1) 1, D(i,j1) 1, D(i,j)]! Backward pass! D(i,j) = min[ D(i,j1) 1, D(i1,j1) 1, D(i1, j) 1, D(i 1,j1) 1, D(i,j)] f f f f b b b b f forward pass pixels b backward pass pixels
13 Computing the distance transform! Two pass sequential algorithm! Initialize: set D(i,j) = 0 where B(i,j) = 1, else set D(i,j) =! Forward pass! D(i,j) = min[ D(i1,j1) 1, D(i1,j) 1, D(i1, j1) 1, D(i,j1) 1, D(i,j)]! Backward pass! D(i,j) = min[ D(i,j1) 1, D(i1,j1) 1, D(i1, j) 1, D(i 1,j1) 1, D(i,j)]
14 Distance transform example D(i,j) = min[d(i,j), D(i,j1)1, D(i1, j1)1, D(i1,j)1, D(i1,j1)1] f f f f b b b b Extensions to nonbinary images (functions) P. Felzenswalb and D. Huttenlocher Distance Transform of Sampled Functions
15 Chamfer matching! Chamfer matching is convolution of a binary edge template with the distance transform! for any placement of the template over the image, it sums up the distance transform values for all pixels that are 1 s (edges) in the template! if, at some position in the image, all of the edges in the template coincide with edges in the image (which are the points at which the distance transform is zero), then we have a perfect match with a match score of 0.
16 Example Template n n T( i Match score is i= 1 j= 1, j) D( i k, j l)

17 Implicit shape models Combining the edge based Hough Transform style voting with appearance codebooks Visual codebook is used to index votes for object position training image annotated with object localization info visual codeword with displacement vectors B. Leibe, A. Leonardis, and B. Schiele, Combined Object Categorization and Segmentation with an Implicit Shape Model, ECCV Workshop on Statistical Learning in Computer Vision 2004

18 Implicit shape models Visual codebook is used to index votes for object position test image

19 Idea Implicit Shape Model! Faces rectangular templates detection windows! Does not generalize to more complex object with different shapes! How to combine patch based appearance based representations to incorporate notion of shape! Combined Object Categorization and Segmentation with an Implicit Shape Model. Bastian Leibe, Ales Leonardis, and Bernt Schiele. In ECCV'04. 30

20 Initial Recognition Approach! First Step: Generate hypotheses from local features! Training: Agglomerative Clustering How to decide when to merge two clusters Average NCC of patches NCC between two patches


21 Initial Recognition Approach! Codebook words spatial information is lost! For each codebook entry store all positions it was activated in relative to object center (positions parametrized by r and theta)! Parts vote for object center Lowe s DoG Detector 3σ x 3σ patches Resize to 25 x 25 Learn Spatial Distribution Find codebook patches

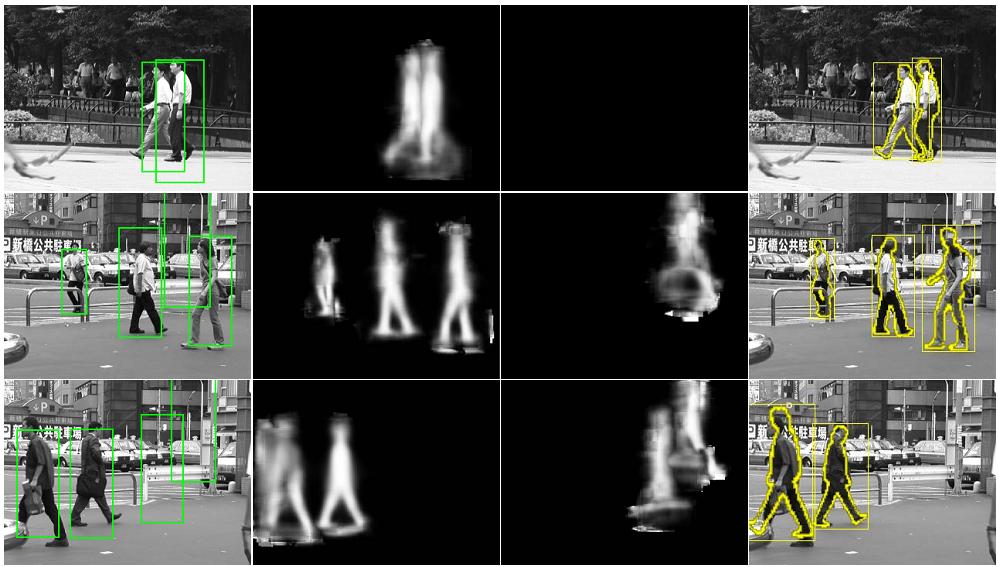
22 Pedestrian Detection in Crowded Scenes 1. Interleaved Object Categorization and Segmentation, BMVC Combined Object Categorization and Segmentation with an Implicit Shape Model. Bastian Leibe, Ales Leonardis, and Bernt Schiele. In ECCV'04 Workshop on Statistical Learning in Computer Vision, Prague, May



23 Pedestrian Detection! Many applications! Large variation in shape, appearance! Need to combine different representations! Basic Premise: [Such a] problem is too difficult for any type of feature or model alone! Probabilistic bottom up, top down segmentation




24 ! Open Question: How would you do pedestrian detection/segmentation? Original image Segmentation from local features! Solution: integrate as many cues as possible from many sources Support of Segmentation from local features Support of segmentation from global features (Chamfer Matching)

25 Theme of the Paper! Goal: Localize AND count pedestrians in a given image! Datasets Training Set: 35 people walking parallel to the image plane Testing Set (Much harder!): 209 images of 595 annotated pedestrians

26 Theme of the Paper

27 Initial Recognition Approach! First Step: Generate hypotheses from local features (Intrinsic Shape Models)! Testing:! Initial Hypothesis: Overall

28 Initial Recognition Approach! First Step: Generate hypotheses from local features (Intrinsic Shape Models)! Testing:! Initial Hypothesis: Overall

29 Initial Recognition Approach! Second Step: Segmentation based Verification (Minimum Description Length)! Caveat: it leads to another set of problems Or four legs and three arms ISM doesn t know a person doesn t have three legs! Global Cues are needed

30 Assimilation of Global Cues! Distance Transform, Chamfer Matching get Feature Image by an edge detector Chamfer Distance between template and DT image get DT image by computing distance to nearest feature point
!")




31 Assimilation of Global Cues (Attempt 1)! Distance Transform, Chamfer Matching Initial hypothesis generated by local features Use scale estimate to cut out surrounding region Yellow is highest Chamfer score Chamfer distance based matching Apply Canny detector and compute DT
32 Results
33 Generative Part Based Models Many slides adapted from FeiFei Li, Rob Fergus, and Antonio Torralba



34 Generative partbased models R. Fergus, P. Perona and A. Zisserman, Object Class Recognition by Unsupervised ScaleInvariant Learning, CVPR 2003
35 Probabilistic model P( image = max h object ) = P( appearance, shape object ) P( appearance h, object ) p( shape h, object ) p( h h: assignment Part of features to Part parts descriptors locations object ) Candidate parts
36 Probabilistic model P( image object ) = P( appearance, shape object ) = max h P( appearance h, object ) p( shape h, object ) p( h object ) h: assignment of features to parts Part 1 Part 3 Part 2
37 Probabilistic model P( image object ) = P( appearance, shape object ) = max h P( appearance h, object ) p( shape h, object ) p( h object ) h: assignment of features to parts Part 1 Part 3 Part 2
38 Probabilistic model P( image = max h object ) = P( appearance, shape object ) P( appearance h, object ) p( shape h, object ) p( h object ) Distribution over patch descriptors Highdimensional appearance space
39 Probabilistic model P( image = max h object ) = P( appearance, shape object ) P( appearance h, object ) p( shape h, object ) p( h object ) Distribution over joint part positions 2D image space
40 How to model location?! Explicit: Probability density functions! Implicit: Voting scheme! Invariance! Translation! Scaling! Similarity/affine! Viewpoint Translation and Scaling Affine transformation Translation Similarity transformation
41 Summary: Adding spatial information Doublet vocabularies! Pro: takes cooccurrences into account, some geometric invariance is preserved! Cons: too many doublet probabilities to estimate Spatial pyramids! Pro: simple extension of a bag of features, works very well! Cons: no geometric invariance, no object localization Implicit shape models! Pro: can localize object, maintain translation and possibly scale invariance! Cons: need supervised training data (known object positions and possibly segmentation masks) Generative partbased models! Pro: very nice conceptually, can be learned from unsegmented images! Cons: combinatorial hypothesis search problem
42 Slides from Sminchisescu

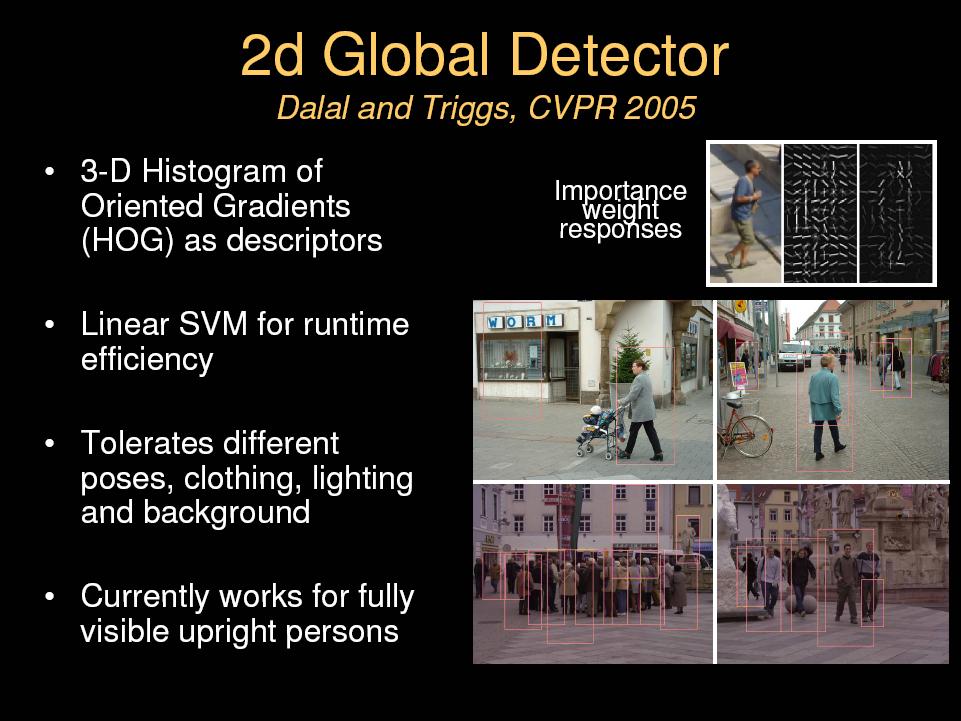
43 Slides by Pete Barnum Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection, CVPR05
44 ! Tested with! RGB! LAB! Grayscale! Gamma Normalization and Compression! Square root! Log

45 centered diagonal uncentered cubiccorrected Sobel Slides by Pete Barnum Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection, CVPR05
46 ! Histogram of gradient orientations Orientation Slides by Pete Barnum Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection, CVPR05
47
48
49
50 8 orientations X= 15x7 cells Slides by Pete Barnum Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection, CVPR05
51
52 pedestrian Slides by Pete Barnum Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection, CVPR05
53 Overfitting! A simple dataset.! Two models Linear Nonlinear
54 Overfitting! Let s get more data.! Simple model has better generalization.
55 Overfitting Loss! As complexity increases, the model overfits the data Real loss! Training loss decreases! Real loss increases Training loss! We need to penalize model complexity = to regularize Model complexity
56 Classification methods! K Nearest Neighbors! Decision Trees! Linear SVMs! Kernel SVMs! Boosted classifiers
57 K Nearest Neighbors o! Memorize all training data! Find K closest points to the query! The neighbors vote for the label: Vote()=2 Vote( )=1

58 KNearest Neighbors Nearest Neighbors (silhouettes) Kristen Grauman, Gregory Shakhnarovich, and Trevor Darrell, Virtual Visual Hulls: ExampleBased 3D Shape Inference from Silhouettes


59 KNearest Neighbors Silhouettes from other views 3D Visual hull Kristen Grauman, Gregory Shakhnarovich, and Trevor Darrell, Virtual Visual Hulls: ExampleBased 3D Shape Inference from Silhouettes
60 Decision tree V()=8 No X 1 >2 Yes V()=8 o V()=2 V()=8 No X 2 >1 Yes V()=4 V()=0 V()=4 V()=8 V()=2
61 Decision Tree Training V()=57% V()=64% V()=80% V()=80% V()=100%! Partition data into pure chunks! Find a good rule! Split the training data! Build left tree! Build right tree! Count the examples in the leaves to get the votes: V(), V()! Stop when! Purity is high! Data size is small! At fixed level


62 Histogram intersection 1 Assign to texture cluster Count S. Lazebnik, C. Schmid, and J. Ponce. Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories.

63 (Spatial) Pyramid Match S. Lazebnik, C. Schmid, and J. Ponce. Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories.
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Object recognition. Methods for classification and image representation
 Object recognition Methods for classification and image representation Credits Slides by Pete Barnum Slides by FeiFei Li Paul Viola, Michael Jones, Robust Realtime Object Detection, IJCV 04 Navneet Dalal
Object recognition Methods for classification and image representation Credits Slides by Pete Barnum Slides by FeiFei Li Paul Viola, Michael Jones, Robust Realtime Object Detection, IJCV 04 Navneet Dalal
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Modern Object Detection. Most slides from Ali Farhadi
 Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Bag of Words Models. CS4670 / 5670: Computer Vision Noah Snavely. Bag-of-words models 11/26/2013
 CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Introduction to object recognition. Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others
 Introduction to object recognition Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others Overview Basic recognition tasks A statistical learning approach Traditional or shallow recognition
Introduction to object recognition Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others Overview Basic recognition tasks A statistical learning approach Traditional or shallow recognition
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Object Detection Design challenges
 Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Object Classification Problem
 HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
 https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Object Detection. Sanja Fidler CSC420: Intro to Image Understanding 1/ 1
 Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Object detection. Announcements. Last time: Mid-level cues 2/23/2016. Wed Feb 24 Kristen Grauman UT Austin
 Object detection Wed Feb 24 Kristen Grauman UT Austin Announcements Reminder: Assignment 2 is due Mar 9 and Mar 10 Be ready to run your code again on a new test set on Mar 10 Vision talk next Tuesday 11
Object detection Wed Feb 24 Kristen Grauman UT Austin Announcements Reminder: Assignment 2 is due Mar 9 and Mar 10 Be ready to run your code again on a new test set on Mar 10 Vision talk next Tuesday 11
Recap Image Classification with Bags of Local Features
 Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
CS4495/6495 Introduction to Computer Vision. 8C-L1 Classification: Discriminative models
 CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Visual Object Recognition
 Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Loose Shape Model for Discriminative Learning of Object Categories
 Loose Shape Model for Discriminative Learning of Object Categories Margarita Osadchy and Elran Morash Computer Science Department University of Haifa Mount Carmel, Haifa 31905, Israel rita@cs.haifa.ac.il
Loose Shape Model for Discriminative Learning of Object Categories Margarita Osadchy and Elran Morash Computer Science Department University of Haifa Mount Carmel, Haifa 31905, Israel rita@cs.haifa.ac.il
Bag-of-features. Cordelia Schmid
 Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Incremental Learning of Object Detectors Using a Visual Shape Alphabet
 Incremental Learning of Object Detectors Using a Visual Shape Alphabet A. Opelt, A. Pinz & A. Zisserman CVPR 06 Presented by Medha Bhargava* * Several slides adapted from authors presentation, CVPR 06
Incremental Learning of Object Detectors Using a Visual Shape Alphabet A. Opelt, A. Pinz & A. Zisserman CVPR 06 Presented by Medha Bhargava* * Several slides adapted from authors presentation, CVPR 06
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
Part-based models. Lecture 10
 Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
String distance for automatic image classification
 String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
Object Recognition and Detection
 CS 2770: Computer Vision Object Recognition and Detection Prof. Adriana Kovashka University of Pittsburgh March 16, 21, 23, 2017 Plan for the next few lectures Recognizing the category in the image as
CS 2770: Computer Vision Object Recognition and Detection Prof. Adriana Kovashka University of Pittsburgh March 16, 21, 23, 2017 Plan for the next few lectures Recognizing the category in the image as
Previously. Window-based models for generic object detection 4/11/2011
 Previously for generic object detection Monday, April 11 UT-Austin Instance recognition Local features: detection and description Local feature matching, scalable indexing Spatial verification Intro to
Previously for generic object detection Monday, April 11 UT-Austin Instance recognition Local features: detection and description Local feature matching, scalable indexing Spatial verification Intro to
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering Department of Computer Science 3129D,
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering Department of Computer Science 3129D,
Lecture 12 Recognition. Davide Scaramuzza
 Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Methods for Representing and Recognizing 3D objects
 Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
Model Fitting: The Hough transform II
 Model Fitting: The Hough transform II Guido Gerig, CS6640 Image Processing, Utah Theory: See handwritten notes GG: HT-notes-GG-II.pdf Credits: S. Narasimhan, CMU, Spring 2006 15-385,-685, Link Svetlana
Model Fitting: The Hough transform II Guido Gerig, CS6640 Image Processing, Utah Theory: See handwritten notes GG: HT-notes-GG-II.pdf Credits: S. Narasimhan, CMU, Spring 2006 15-385,-685, Link Svetlana
By Suren Manvelyan,
 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
EECS 442 Computer vision. Object Recognition
 EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Challenges: intraclass variation
EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Challenges: intraclass variation
 5*4%),-
5*4%),- Recognize Complex Events from Static Images by Fusing Deep Channels Supplementary Materials
 Recognize Complex Events from Static Images by Fusing Deep Channels Supplementary Materials Yuanjun Xiong 1 Kai Zhu 1 Dahua Lin 1 Xiaoou Tang 1,2 1 Department of Information Engineering, The Chinese University
Recognize Complex Events from Static Images by Fusing Deep Channels Supplementary Materials Yuanjun Xiong 1 Kai Zhu 1 Dahua Lin 1 Xiaoou Tang 1,2 1 Department of Information Engineering, The Chinese University
Object Recognition Using Pictorial Structures. Daniel Huttenlocher Computer Science Department. In This Talk. Object recognition in computer vision
 Object Recognition Using Pictorial Structures Daniel Huttenlocher Computer Science Department Joint work with Pedro Felzenszwalb, MIT AI Lab In This Talk Object recognition in computer vision Brief definition
Object Recognition Using Pictorial Structures Daniel Huttenlocher Computer Science Department Joint work with Pedro Felzenszwalb, MIT AI Lab In This Talk Object recognition in computer vision Brief definition
High Level Computer Vision
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES
 IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
Templates and Background Subtraction. Prof. D. Stricker Doz. G. Bleser
 Templates and Background Subtraction Prof. D. Stricker Doz. G. Bleser 1 Surveillance Video: Example of multiple people tracking http://www.youtube.com/watch?v=inqv34bchem&feature=player_embedded As for
Templates and Background Subtraction Prof. D. Stricker Doz. G. Bleser 1 Surveillance Video: Example of multiple people tracking http://www.youtube.com/watch?v=inqv34bchem&feature=player_embedded As for
Generic Object-Face detection
 Generic Object-Face detection Jana Kosecka Many slides adapted from P. Viola, K. Grauman, S. Lazebnik and many others Today Window-based generic object detection basic pipeline boosting classifiers face
Generic Object-Face detection Jana Kosecka Many slides adapted from P. Viola, K. Grauman, S. Lazebnik and many others Today Window-based generic object detection basic pipeline boosting classifiers face
ImageCLEF 2011
 SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
Fitting: Voting and the Hough Transform April 23 rd, Yong Jae Lee UC Davis
 Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Image classification Computer Vision Spring 2018, Lecture 18
 Image classification http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 18 Course announcements Homework 5 has been posted and is due on April 6 th. - Dropbox link because course
Image classification http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 18 Course announcements Homework 5 has been posted and is due on April 6 th. - Dropbox link because course
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
CS 1674: Intro to Computer Vision. Object Recognition. Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018
 CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Category-level Localization
 Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb,
Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb,
Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections
 Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections Nima Razavi 1, Juergen Gall 1, and Luc Van Gool 1,2 1 Computer Vision Laboratory, ETH Zurich 2 ESAT-PSI/IBBT,
Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections Nima Razavi 1, Juergen Gall 1, and Luc Van Gool 1,2 1 Computer Vision Laboratory, ETH Zurich 2 ESAT-PSI/IBBT,
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Histograms of Oriented Gradients for Human Detection p. 1/1
 Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
An Exploration of Computer Vision Techniques for Bird Species Classification
 An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
Artistic ideation based on computer vision methods
 Journal of Theoretical and Applied Computer Science Vol. 6, No. 2, 2012, pp. 72 78 ISSN 2299-2634 http://www.jtacs.org Artistic ideation based on computer vision methods Ferran Reverter, Pilar Rosado,
Journal of Theoretical and Applied Computer Science Vol. 6, No. 2, 2012, pp. 72 78 ISSN 2299-2634 http://www.jtacs.org Artistic ideation based on computer vision methods Ferran Reverter, Pilar Rosado,
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
Object Recognition II
 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Part-Based Models for Object Class Recognition Part 3
 High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition
 Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition Bangpeng Yao 1, Juan Carlos Niebles 2,3, Li Fei-Fei 1 1 Department of Computer Science, Princeton University, NJ 08540, USA
Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition Bangpeng Yao 1, Juan Carlos Niebles 2,3, Li Fei-Fei 1 1 Department of Computer Science, Princeton University, NJ 08540, USA
Object Detection. Computer Vision Yuliang Zou, Virginia Tech. Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick
 Object Detection Computer Vision Yuliang Zou, Virginia Tech Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick Administrative stuffs HW 4 due 11:59pm on Wed, November 8 HW 3 grades are out Average:
Object Detection Computer Vision Yuliang Zou, Virginia Tech Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick Administrative stuffs HW 4 due 11:59pm on Wed, November 8 HW 3 grades are out Average:
OBJECT CATEGORIZATION
 OBJECT CATEGORIZATION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it Slides: Ing. Lamberto Ballan November 18th, 2009 What is an Object? Merriam-Webster Definition: Something material that may be
OBJECT CATEGORIZATION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it Slides: Ing. Lamberto Ballan November 18th, 2009 What is an Object? Merriam-Webster Definition: Something material that may be
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
EECS 442 Computer vision. Fitting methods
 EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
Keypoint-based Recognition and Object Search
 03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
Fusing shape and appearance information for object category detection
 1 Fusing shape and appearance information for object category detection Andreas Opelt, Axel Pinz Graz University of Technology, Austria Andrew Zisserman Dept. of Engineering Science, University of Oxford,
1 Fusing shape and appearance information for object category detection Andreas Opelt, Axel Pinz Graz University of Technology, Austria Andrew Zisserman Dept. of Engineering Science, University of Oxford,
Human detection using histogram of oriented gradients. Srikumar Ramalingam School of Computing University of Utah
 Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
ObjectDetectionusingaMax-MarginHoughTransform
 ObjectDetectionusingaMax-MarginHoughTransform Subhransu Maji, Jitendra Malik Computer Science Division, EECS University of California at Berkeley {smaji,malik}@cs.berkeley.edu Abstract We present a discriminative
ObjectDetectionusingaMax-MarginHoughTransform Subhransu Maji, Jitendra Malik Computer Science Division, EECS University of California at Berkeley {smaji,malik}@cs.berkeley.edu Abstract We present a discriminative
A novel template matching method for human detection
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2009 A novel template matching method for human detection Duc Thanh Nguyen
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2009 A novel template matching method for human detection Duc Thanh Nguyen
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Efficient Kernels for Identifying Unbounded-Order Spatial Features
 Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Descriptors for CV. Introduc)on:
on:") Descriptors for CV Content 2014 1.Introduction 2.Histograms 3.HOG 4.LBP 5.Haar Wavelets 6.Video based descriptor 7.How to compare descriptors 8.BoW paradigm 1 2 1 2 Color RGB histogram Introduc)on: Image
Descriptors for CV Content 2014 1.Introduction 2.Histograms 3.HOG 4.LBP 5.Haar Wavelets 6.Video based descriptor 7.How to compare descriptors 8.BoW paradigm 1 2 1 2 Color RGB histogram Introduc)on: Image
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Classification and Detection in Images. D.A. Forsyth
 Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
CV as making bank. Intel buys Mobileye! $15 billion. Mobileye:
 CV as making bank Intel buys Mobileye! $15 billion Mobileye: Spin-off from Hebrew University, Israel 450 engineers 15 million cars installed 313 car models June 2016 - Tesla left Mobileye Fatal crash car
CV as making bank Intel buys Mobileye! $15 billion Mobileye: Spin-off from Hebrew University, Israel 450 engineers 15 million cars installed 313 car models June 2016 - Tesla left Mobileye Fatal crash car
Image Analysis. Window-based face detection: The Viola-Jones algorithm. iphoto decides that this is a face. It can be trained to recognize pets!
 Image Analysis 2 Face detection and recognition Window-based face detection: The Viola-Jones algorithm Christophoros Nikou cnikou@cs.uoi.gr Images taken from: D. Forsyth and J. Ponce. Computer Vision:
Image Analysis 2 Face detection and recognition Window-based face detection: The Viola-Jones algorithm Christophoros Nikou cnikou@cs.uoi.gr Images taken from: D. Forsyth and J. Ponce. Computer Vision: