HISTOGRAMS OF ORIENTATIO N GRADIENTS
|
|
|
- Chad McCarthy
- 6 years ago
- Views:
Transcription
1 HISTOGRAMS OF ORIENTATIO N GRADIENTS

2 Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients or edge directions even without precise information about the location of the edges themselves.
3 Algorithm Overview Divide image into small sub-images: cells Cells can be rectangular (R-HOG) or circular (C-HOG) Accumulate a histogram of edge orientations within that cell The combined histogram entries are used as the feature vector describing the object To provide better illumination invariance (lighting, shadows, etc.) normalize the cells across larger regions incorporating multiple cells: blocks
4 Why HOG? Capture edge or gradient structure that is very characteristic of local shape Relatively invariant to local geometric and photometric transformations Within cell rotations and translations do not affect the HOG values Illumination invariance achieved through normalization The spatial and orientation sampling densities can be tuned for different applications For human detection (Dalal and Triggs) coarse spatial sampling and fine orientation sampling works best For hand gesture recognition (Fernandez-Llorca and Lacey) finer spatial sampling and orientation sampling is required

5 A worked example: Dalal and Triggs CVPR 05
6 Colour Normalisation RGB and LAB colour spaces equivalent Gamma correction (gain) no major affect on results Greyscale only small negative effect (-1.5%) on results
7 Computing the Gradient Several gradient detectors tried [1,-1], [1,0,-1], [1,-8,0,8,-1], Sobel Unfiltered and Pre-filtered with Gaussian smoothing Simplest [1,0,-1] proved best Gaussian smoothing affected results negatively For colour images Compute each channel separately Choose the largest value as the gradient for that pixel
8 Orientation Binning Each pixel votes for an orientation according to the closest bin in the range 0 to 180 (ignore negative edge directions) 0 to 360 Bilinear smoothing to reduce aliasing effects The vote is weighted by the gradient magnitude Magnitude, Magnitude^2, edge presence absence, etc
9 Normalization Gradient is affected by illumination changes normalization needed Normalization takes the maximum range of a signal and stretches it to take up the maximum possible range E.g.:- A simple normalization scheme: if the range of pixel values is out of a total of then min=50 and max =180, normalization > (old_pix - min)*((max-min)/255)= new_pix Other normalization schemes can be used Group cells into larger blocks Normalize within the blocks This ensures that low contrast regions are stretched Overlapping blocks This ensures consistency

10 Dalal and Triggs results (demo)

11
12 SIFT: Introduction Matching features across different images in a common problem in computer vision. When all images are similar in nature (same scale, orientation, etc) simple corner detectors can work. But when you have images of different scales and rotations, you need to use the Scale Invariant Feature Transform. Why care about SIFT? SIFT isn't just scale invariant. You can change the following, and still get good results: Scale (duh) Rotation Illumination Viewpoint
13
14

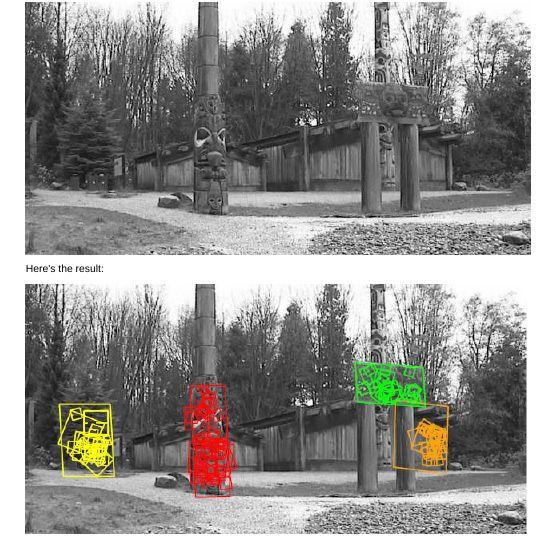
15 Locate maxima/minima in DoG images (demo) The first step is to coarsely locate the maxima and minima. You iterate through each pixel and check all it's neighbours. The check is done within the current image, and also the one above and below it. X marks the current pixel. The green circles mark the neighbours. This way, a total of 26 checks are made. X is marked as a "key point" if it is the greatest or least of all 26 neighbours.
 in that region. And we assign this orientation(s) to the keypoint.")
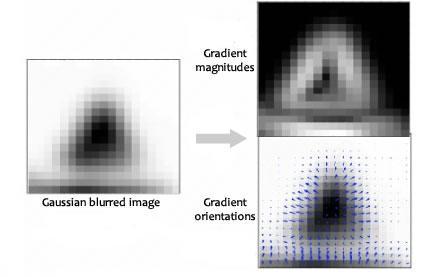
16 SIFT: Keypoint orientations The idea The idea is to collect gradient directions and magnitudes around each keypoint. Then we figure out the most prominent orientation(s) in that region. And we assign this orientation(s) to the keypoint. Any later calculations are done relative to this orientation. This ensures rotation invariance.
17
18 The magnitude and orientation is calculated for all pixels around the keypoint. Then, A histogram is created for this. In this histogram, the 360 degrees of orientation are broken into 36 bins (each 10 degrees). Lets say the gradient direction at a certain point (in the "orientation collection region") is degrees, then it will go into the degree bin. And the "amount" that is added to the bin is proportional to the magnitude of gradient at that point. Once you've done this for all pixels around the keypoint, the histogram will have a peak at some point. Above, you see the histogram peaks at degrees. So, the keypoint is assigned orientation 3 (the third bin) Also, any peaks above 80% of the highest peak are converted into a new keypoint. This new keypoint has the same location and scale as the original. But it's orientation is equal to the other peak. So, orientation can split up one keypoint into multiple keypoints.

19 SIFT: Generating a feature We want to generate a very unique fingerprint for the keypoint. It should be easy to calculate. We also want it to be relatively lenient when it is being compared against other keypoints. Things are never EXACTLY same when comparing two different images. To do this, a 16x16 window around the keypoint. This 16x16 window is broken into sixteen 4x4 windows.

20 Gaussian Blur!

21 A Space Carving Approach to Surface Reconstruction Basic Idea: Volume Intersection Back-project each silhouettes Intersect back-projected volumes

22 Given N calibrated views/images, recover the 3D scene Problem posed as a constraint satisfaction task Photo-consistent shape recovery Practical Algorithm to perform Space Carving
 it Stop if no photo-consistent voxel")
23 Algorithm Initialize a volume V containing the true Scene For each voxel on current surface Project it to all visible input images if not photo-consistent, carve (remove) it Stop if no photo-consistent voxel found

24 Visibility Ordering Basic Idea: Visit Occluders first More Generally, Plane Sweep Algo:- Sweep Plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Lecture 10 Detectors and descriptors
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Human detection using histogram of oriented gradients. Srikumar Ramalingam School of Computing University of Utah
 Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 231A Computer Vision (Winter 2018) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Histograms of Oriented Gradients for Human Detection p. 1/1
 Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Obtaining Feature Correspondences
 Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Scale Invariant Feature Transform by David Lowe
 Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
TA Section 7 Problem Set 3. SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)
 Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)") TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Histograms of Oriented Gradients
 Histograms of Oriented Gradients Carlo Tomasi September 18, 2017 A useful question to ask of an image is whether it contains one or more instances of a certain object: a person, a face, a car, and so forth.
Histograms of Oriented Gradients Carlo Tomasi September 18, 2017 A useful question to ask of an image is whether it contains one or more instances of a certain object: a person, a face, a car, and so forth.
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Eppur si muove ( And yet it moves )
") Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Object Detection Design challenges
 Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
PS3 Review Session. Kuan Fang CS231A 02/16/2018
 PS3 Review Session Kuan Fang CS231A 02/16/2018 Overview Space carving Single Object Recognition via SIFT Histogram of Oriented Gradients (HOG) Space Carving Objective: Implement the process of space carving.
PS3 Review Session Kuan Fang CS231A 02/16/2018 Overview Space carving Single Object Recognition via SIFT Histogram of Oriented Gradients (HOG) Space Carving Objective: Implement the process of space carving.
Designing Applications that See Lecture 7: Object Recognition
 stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Histogram of Oriented Gradients for Human Detection
 Histogram of Oriented Gradients for Human Detection Article by Navneet Dalal and Bill Triggs All images in presentation is taken from article Presentation by Inge Edward Halsaunet Introduction What: Detect
Histogram of Oriented Gradients for Human Detection Article by Navneet Dalal and Bill Triggs All images in presentation is taken from article Presentation by Inge Edward Halsaunet Introduction What: Detect
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
A Novel Algorithm for Color Image matching using Wavelet-SIFT
 International Journal of Scientific and Research Publications, Volume 5, Issue 1, January 2015 1 A Novel Algorithm for Color Image matching using Wavelet-SIFT Mupuri Prasanth Babu *, P. Ravi Shankar **
International Journal of Scientific and Research Publications, Volume 5, Issue 1, January 2015 1 A Novel Algorithm for Color Image matching using Wavelet-SIFT Mupuri Prasanth Babu *, P. Ravi Shankar **
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Car Detecting Method using high Resolution images
 Car Detecting Method using high Resolution images Swapnil R. Dhawad Department of Electronics and Telecommunication Engineering JSPM s Rajarshi Shahu College of Engineering, Savitribai Phule Pune University,
Car Detecting Method using high Resolution images Swapnil R. Dhawad Department of Electronics and Telecommunication Engineering JSPM s Rajarshi Shahu College of Engineering, Savitribai Phule Pune University,
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
Coarse-to-fine image registration
 Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
Types of image feature and segmentation
 COMP3204/COMP6223: Computer Vision Types of image feature and segmentation Jonathon Hare jsh2@ecs.soton.ac.uk Image Feature Morphology Recap: Feature Extractors image goes in Feature Extractor featurevector(s)
COMP3204/COMP6223: Computer Vision Types of image feature and segmentation Jonathon Hare jsh2@ecs.soton.ac.uk Image Feature Morphology Recap: Feature Extractors image goes in Feature Extractor featurevector(s)
Selective Search for Object Recognition
 Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
3D Reconstruction From Multiple Views Based on Scale-Invariant Feature Transform. Wenqi Zhu
 3D Reconstruction From Multiple Views Based on Scale-Invariant Feature Transform Wenqi Zhu wenqizhu@buffalo.edu Problem Statement! 3D reconstruction 3D reconstruction is a problem of recovering depth information
3D Reconstruction From Multiple Views Based on Scale-Invariant Feature Transform Wenqi Zhu wenqizhu@buffalo.edu Problem Statement! 3D reconstruction 3D reconstruction is a problem of recovering depth information
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Multi-modal Registration of Visual Data. Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy
 Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
An Exploration of the SIFT Operator. Module number: P00999 Supervisor: Prof. Philip H. S. Torr Course code: CM79
 An Exploration of the SIFT Operator Module number: P00999 Supervisor: Prof. Philip H. S. Torr Course code: CM79 Jonathan Rihan Student number: 04073838 September 1, 2005 Dissertation Plan: An Exploration
An Exploration of the SIFT Operator Module number: P00999 Supervisor: Prof. Philip H. S. Torr Course code: CM79 Jonathan Rihan Student number: 04073838 September 1, 2005 Dissertation Plan: An Exploration
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
Matlab Tutorial. Session 2. SIFT. Gonzalo Vaca-Castano
 Matlab Tutorial. Session 2. SIFT Gonzalo Vaca-Castano Sift purpose Find and describe interest points invariants to: Scale Rotation Illumination Viewpoint Do it Yourself Constructing a scale space LoG Approximation
Matlab Tutorial. Session 2. SIFT Gonzalo Vaca-Castano Sift purpose Find and describe interest points invariants to: Scale Rotation Illumination Viewpoint Do it Yourself Constructing a scale space LoG Approximation
A Statistical Consistency Check for the Space Carving Algorithm.
 A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
Image Features: Detection, Description, and Matching and their Applications
 Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
VK Multimedia Information Systems
 VK Multimedia Information Systems Mathias Lux, mlux@itec.uni-klu.ac.at Dienstags, 16.oo Uhr This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Agenda Evaluations
VK Multimedia Information Systems Mathias Lux, mlux@itec.uni-klu.ac.at Dienstags, 16.oo Uhr This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Agenda Evaluations
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
 https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4
, Module 4") Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
Fast Image Matching Using Multi-level Texture Descriptor
 Fast Image Matching Using Multi-level Texture Descriptor Hui-Fuang Ng *, Chih-Yang Lin #, and Tatenda Muindisi * Department of Computer Science, Universiti Tunku Abdul Rahman, Malaysia. E-mail: nghf@utar.edu.my
Fast Image Matching Using Multi-level Texture Descriptor Hui-Fuang Ng *, Chih-Yang Lin #, and Tatenda Muindisi * Department of Computer Science, Universiti Tunku Abdul Rahman, Malaysia. E-mail: nghf@utar.edu.my
Key properties of local features
 Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Local Image preprocessing (cont d)
") Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Human Motion Detection and Tracking for Video Surveillance
 Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Click to edit title style
 Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Using Geometric Blur for Point Correspondence
 1 Using Geometric Blur for Point Correspondence Nisarg Vyas Electrical and Computer Engineering Department, Carnegie Mellon University, Pittsburgh, PA Abstract In computer vision applications, point correspondence
1 Using Geometric Blur for Point Correspondence Nisarg Vyas Electrical and Computer Engineering Department, Carnegie Mellon University, Pittsburgh, PA Abstract In computer vision applications, point correspondence
Computer Science Faculty, Bandar Lampung University, Bandar Lampung, Indonesia
 Application Object Detection Using Histogram of Oriented Gradient For Artificial Intelegence System Module of Nao Robot (Control System Laboratory (LSKK) Bandung Institute of Technology) A K Saputra 1.,
Application Object Detection Using Histogram of Oriented Gradient For Artificial Intelegence System Module of Nao Robot (Control System Laboratory (LSKK) Bandung Institute of Technology) A K Saputra 1.,
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
EN1610 Image Understanding Lab # 4: Corners, Interest Points, Hough Transform
 EN1610 Image Understanding Lab # 4: Corners, Interest Points, Hough Transform The goal of this fourth lab is to ˆ Learn how to detect corners, and use them in a tracking application ˆ Learn how to describe
EN1610 Image Understanding Lab # 4: Corners, Interest Points, Hough Transform The goal of this fourth lab is to ˆ Learn how to detect corners, and use them in a tracking application ˆ Learn how to describe
Corner Detection. GV12/3072 Image Processing.
 Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Person Detection in Images using HoG + Gentleboost. Rahul Rajan June 1st July 15th CMU Q Robotics Lab
 Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
IMAGE-GUIDED TOURS: FAST-APPROXIMATED SIFT WITH U-SURF FEATURES
 IMAGE-GUIDED TOURS: FAST-APPROXIMATED SIFT WITH U-SURF FEATURES Eric Chu, Erin Hsu, Sandy Yu Department of Electrical Engineering Stanford University {echu508, erinhsu, snowy}@stanford.edu Abstract In
IMAGE-GUIDED TOURS: FAST-APPROXIMATED SIFT WITH U-SURF FEATURES Eric Chu, Erin Hsu, Sandy Yu Department of Electrical Engineering Stanford University {echu508, erinhsu, snowy}@stanford.edu Abstract In