WebcamPaperPen: A Low-Cost Graphics Tablet
|
|
|
- Mariah Briana Gordon
- 6 years ago
- Views:
Transcription



1 WebcamPaperPen: A Low-Cost Graphics Tablet Gustavo T. Pfeiffer, Ricardo G. Marroquim, Antonio A. F. Oliveira LCG-COPPE-UFRJ
 Graphics Tablet Device used to draw and handwrite Also controls the mouse cursor WebcamPaperPen improvisable vision-based HCI alternative low-cost practical easy to set")
2 WebcamPaperPen: A Low-Cost Graphics Tablet Goal: Replace the graphics tablet by webcam, paper and pen? ( Bamboo_Capture_tablet_and_pen.jpg) Graphics Tablet Device used to draw and handwrite Also controls the mouse cursor WebcamPaperPen improvisable vision-based HCI alternative low-cost practical easy to set up
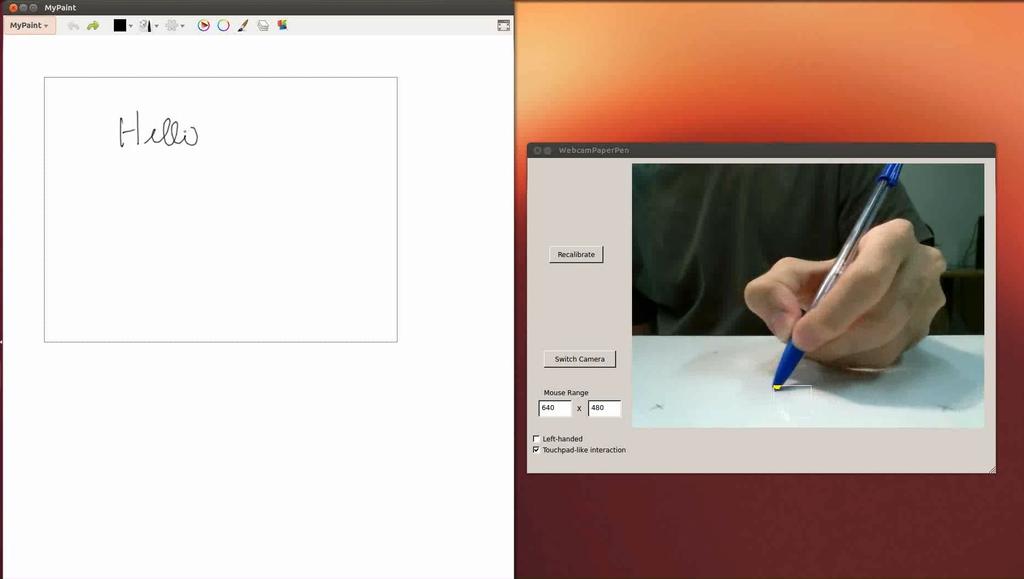
3 WebcamPaperPen in Action
4 Motivation Project Libera Akademio Video lectures to the masses collaborative extremely low-cost similar to Khan Academy in style Khan Academy video ( Libera Akademio Editor

 But requires the graphics tablet Wouldn't webcam, paper")
5 Motivation Project Libera Akademio Video lectures to the masses collaborative extremely low-cost similar to Khan Academy in style Khan Academy video ( But requires the graphics tablet Wouldn't webcam, paper and pen be much better? Libera Akademio Editor
6 Related Work
7 Related Work Body Parts Tracking HAO and LEI, 2008 MANCHANDA and BING, 2010
8 Related Work Body Parts Tracking Light Tracking PIAZZA and FIELD, 2007 HAO and LEI, MANCHANDA and BING,


9 Related Work Body Parts Tracking Light Tracking Pen Tip Tracking PIAZZA and FIELD, 2007 MUNICH and PERONA, 2002 HAO and LEI, MANCHANDA and BING, YASUDA et al., 2010
 hitting point")
10 Fundamentals of WebcamPaperPen pen cap tip tracking shadow tip tracking projection (hitting point prediction) hitting point rectification


11 Calibration Calibration Step Drawing Step
12 Method Calibration 1. Search the paper, get mean intensity
13 Method Calibration outliers inliers p(x,y) = Ax² + Bxy + Cy² +Dx + Ey + F 1. Search the paper, get mean intensity 2. fit intensity to a quadratic function
14 Method Calibration outliers inliers p(x,y) = Ax² + Bxy + Cy² +Dx + Ey + F 1. Search the paper, get mean intensity 2. fit intensity to a quadratic function 3. Compare pixelwise to fitted function
15 Method Calibration outliers inliers p(x,y) = Ax² + Bxy + Cy² +Dx + Ey + F 1. Search the paper, get mean intensity 2. fit intensity to a quadratic function 3. Compare pixelwise 4. Classify connected to fitted function components
16 Method Calibration outliers inliers p(x,y) = Ax² + Bxy + Cy² +Dx + Ey + F 1. Search the paper, get mean intensity 2. fit intensity to a quadratic function minimum 5. minimum intensity after blur 3. Compare pixelwise 4. Classify connected to fitted function components
17 Method Calibration outliers inliers p(x,y) = Ax² + Bxy + Cy² +Dx + Ey + F 1. Search the paper, get mean intensity 2. fit intensity to a quadratic function 3. Compare pixelwise 4. Classify connected to fitted function components minimum 5. minimum intensity after blur 6. update using quadratic fit
18 Method Calibration outliers inliers p(x,y) = Ax² + Bxy + Cy² +Dx + Ey + F 1. Search the paper, get mean intensity 2. fit intensity to a quadratic function 3. Compare pixelwise 4. Classify connected to fitted function components minimum 5. minimum intensity after blur 6. update using quadratic fit 7. Classify crosses
19 Pen Cap Tip Tracking
20 Method Pen Cap Tip Tracking 1. Apply blue filter and maximize 2y+x
21 Method Pen Cap Tip Tracking 1. Apply blue filter and maximize 2y+x 2. Minimize sum (hor.) Maximize Sobel (ver.)
22 Method Pen Cap Tip Tracking 1. Apply blue filter and maximize 2y+x 3. Search pixel that maximizes objective function 2. Minimize sum (hor.) Maximize Sobel (ver.)
 Maximize Sobel (ver.) 3. Search pixel that maximizes objective function 4.")
23 Method Pen Cap Tip Tracking 1. Apply blue filter and maximize 2y+x 2. Minimize sum (hor.) Maximize Sobel (ver.) 3. Search pixel that maximizes objective function 4. Subpixel estimation using quadratic fit
24 Hitting Point Prediction projection
25 Theory - Hitting Point Prediction h=(z d) (l s) Assumption: l=(1,0,0) d=(0,1,0)
26 Shadow Tip Tracking
27 Method Shadow Tracking #paper Occurrences per line 70%of the line y Threshold: 75% of paper intensity
28 Method Shadow Tracking #paper Occurrences per line 70%of the line y Use linear interpolation? Threshold: 75% of paper intensity Linear interpolation Actual (?) curve
29 Method Shadow Tracking #paper Occurrences per line 70%of the line y Threshold: 75% of paper intensity y y+1
30 Method Shadow Tracking #paper Occurrences per line 70%of the line y Threshold: 75% of paper intensity y y+1 Linear interpolation after gamma correction p(x,y) paper intensity p(x,y+1) y? y+1
31 Method Shadow Tracking #paper Occurrences per line 70%of the line y Threshold: 75% of paper intensity y y+1 Linear interpolation after gamma correction p(x,y) paper intensity p(x,y+1) y? y+1
32 Method Shadow Tracking #paper Occurrences per line 70%of the line y Interpolation by sorting Threshold: 75% of paper intensity y y+1 Linear interpolation after gamma correction p(x,y) paper intensity p(x,y+1) y? y+1
33 Method Mouse Motion Rectification (homography) four crosses' convex hull mouse range window Rounded off using hysteresis technique
34 Method - Conditions for Mouse Click h 1. Pen and shadow must be near each other
35 Method - Conditions for Mouse Click h ignore pen area 1. Pen and shadow must be near each other high variance (σ/µ = H) low variance (σ/µ = L) 2. Variance must be high
36 Method - Conditions for Mouse Click h ignore pen area 1. Pen and shadow must be near each other high variance (σ/µ = H) low variance (σ/µ = L) 2. Variance must be high H σ/µ threshold L Adaptive Threshold and Hysteresis

37 Results: Comparisons with Graphics Tablet Pencil and Paper Graphics Tablet Our Method
38 Precision Detail Graphics Tablet Our Method
39 Limitations Restrictions in illumination, webcam, way of holding the pen, etc.
40 Limitations Restrictions in illumination, webcam, way of holding the pen, etc. Serif effect:


41 More Results
42 Supplementary Video
43 Conclusions Our system is low-cost practical easy to set up modestly precise Good for handwriting and simple drawings But not enough for more artistic purposes
44 Future Work Increase flexibility and stability Less setup restrictions Try something with the 3D position of the pen can be easily calculated using the shadow
45 Thank you for your attention! Downloads, source code, etc.: Questions? Comments?
46 Survey Familiarity with graphics tablets Control Quality Ease of setup Would you use it? Most reported problems: undesired click (47%), serif effect (40%)
47 Quantitative Precision Measurement Asked a user to hold the pen still in some positions and poses Estimated σ using f(t) f(t-1) ( Discarded values above 0.5, corresponding to 12.0% of the values for hor. pen tip 9.8% of the values for ver. pen tip 2.1% of the values for shadow tip Obtained σ=0.116 for hor. pen tip σ=0.103 for ver. pen tip σ=0.095 for shadow tip
48 Why use the cap shut? Easier to track Users won't look at the paper, but at the monitor More applications If you can look at the paper, you need no online processing Less paper is consumed
49 References M. R. Salomão, Libera Akademio: An authoring tool for low-cost educational video creation, edition and translation. Rio de Janeiro. Escola Politécnica / UFRJ, Z. Hao and Q. Lei, Vision-based interface: Using face and eye blinking tracking with camera, in Intelligent Information Technology Application, IITA 08. Second International Symposium on, vol. 1, Dec. 2008, pp K. Manchanda and B. Bing, Advanced mouse pointer control using trajectory-based gesture recognition, in IEEE SoutheastCon 2010 (SoutheastCon), Proceedings of the, Mar. 2010, pp T. Piazza and M. Fjeld, Ortholumen: Using light for direct tabletop input, in Horizontal Interactive Human-Computer Systems, TABLETOP 07. Second Annual IEEE International Workshop on, Oct. 2007, pp accessed in March accessed in March M. E. Munich and P. Perona, Visual input for pen-based computers, IEEE Trans. Pattern Anal. Mach. Intell., vol. 24, no. 3, pp , Mar K. Yasuda, D. Muramatsu, S. Shirato, and T. Matsumoto, Visual-based online signature verification using features extracted from video, J. Netw. Comput. Appl., vol. 33, no. 3, pp , May 2010.
WebcamPaperPen: A Low-Cost Graphics Tablet
 WebcamPaperPen: A Low-Cost Graphics Tablet Graduation Project Computer and Information Engineering Gustavo Thebit Pfeiffer Supervisor: Prof. Ricardo Guerra Marroquim, D.Sc. Examiners: Prof. Antonio Alberto
WebcamPaperPen: A Low-Cost Graphics Tablet Graduation Project Computer and Information Engineering Gustavo Thebit Pfeiffer Supervisor: Prof. Ricardo Guerra Marroquim, D.Sc. Examiners: Prof. Antonio Alberto
WebcamPaperPen: A Low-Cost Graphics Tablet
 WebcamPaperPen: A Low-Cost Graphics Tablet Gustavo Pfeiffer, Ricardo Marroquim, Antonio A. F. Oliveira Laboratório de Computação Gráfica (LCG) - COPPE - UFRJ Fig.. Drawing and handwriting examples using
WebcamPaperPen: A Low-Cost Graphics Tablet Gustavo Pfeiffer, Ricardo Marroquim, Antonio A. F. Oliveira Laboratório de Computação Gráfica (LCG) - COPPE - UFRJ Fig.. Drawing and handwriting examples using
Online Signature Verification Technique
 Volume 3, Issue 1 ISSN: 2320-5288 International Journal of Engineering Technology & Management Research Journal homepage: www.ijetmr.org Online Signature Verification Technique Ankit Soni M Tech Student,
Volume 3, Issue 1 ISSN: 2320-5288 International Journal of Engineering Technology & Management Research Journal homepage: www.ijetmr.org Online Signature Verification Technique Ankit Soni M Tech Student,
On-line handwriting recognition using Chain Code representation
 On-line handwriting recognition using Chain Code representation Final project by Michal Shemesh shemeshm at cs dot bgu dot ac dot il Introduction Background When one preparing a first draft, concentrating
On-line handwriting recognition using Chain Code representation Final project by Michal Shemesh shemeshm at cs dot bgu dot ac dot il Introduction Background When one preparing a first draft, concentrating
Fundamental Matrices from Moving Objects Using Line Motion Barcodes
 Fundamental Matrices from Moving Objects Using Line Motion Barcodes Yoni Kasten (B), Gil Ben-Artzi, Shmuel Peleg, and Michael Werman School of Computer Science and Engineering, The Hebrew University of
Fundamental Matrices from Moving Objects Using Line Motion Barcodes Yoni Kasten (B), Gil Ben-Artzi, Shmuel Peleg, and Michael Werman School of Computer Science and Engineering, The Hebrew University of
Scanner Parameter Estimation Using Bilevel Scans of Star Charts
 ICDAR, Seattle WA September Scanner Parameter Estimation Using Bilevel Scans of Star Charts Elisa H. Barney Smith Electrical and Computer Engineering Department Boise State University, Boise, Idaho 8375
ICDAR, Seattle WA September Scanner Parameter Estimation Using Bilevel Scans of Star Charts Elisa H. Barney Smith Electrical and Computer Engineering Department Boise State University, Boise, Idaho 8375
COMS W4735: Visual Interfaces To Computers. Final Project (Finger Mouse) Submitted by: Tarandeep Singh Uni: ts2379
 Submitted by: Tarandeep Singh Uni: ts2379") COMS W4735: Visual Interfaces To Computers Final Project (Finger Mouse) Submitted by: Tarandeep Singh Uni: ts2379 FINGER MOUSE (Fingertip tracking to control mouse pointer) Abstract. This report discusses
COMS W4735: Visual Interfaces To Computers Final Project (Finger Mouse) Submitted by: Tarandeep Singh Uni: ts2379 FINGER MOUSE (Fingertip tracking to control mouse pointer) Abstract. This report discusses
Texture Sensitive Image Inpainting after Object Morphing
 Texture Sensitive Image Inpainting after Object Morphing Yin Chieh Liu and Yi-Leh Wu Department of Computer Science and Information Engineering National Taiwan University of Science and Technology, Taiwan
Texture Sensitive Image Inpainting after Object Morphing Yin Chieh Liu and Yi-Leh Wu Department of Computer Science and Information Engineering National Taiwan University of Science and Technology, Taiwan
Eye-blink Detection Using Gradient Orientations
 Eye-blink Detection Using Gradient Orientations Tomáš DRUTAROVSKÝ Slovak University of Technology in Bratislava Faculty of Informatics and Information Technologies Ilkovičova 2, 842 16 Bratislava, Slovakia
Eye-blink Detection Using Gradient Orientations Tomáš DRUTAROVSKÝ Slovak University of Technology in Bratislava Faculty of Informatics and Information Technologies Ilkovičova 2, 842 16 Bratislava, Slovakia
Optimization and least squares. Prof. Noah Snavely CS1114
 Optimization and least squares Prof. Noah Snavely CS1114 http://cs1114.cs.cornell.edu Administrivia A5 Part 1 due tomorrow by 5pm (please sign up for a demo slot) Part 2 will be due in two weeks (4/17)
Optimization and least squares Prof. Noah Snavely CS1114 http://cs1114.cs.cornell.edu Administrivia A5 Part 1 due tomorrow by 5pm (please sign up for a demo slot) Part 2 will be due in two weeks (4/17)
Production of Video Images by Computer Controlled Cameras and Its Application to TV Conference System
 Proc. of IEEE Conference on Computer Vision and Pattern Recognition, vol.2, II-131 II-137, Dec. 2001. Production of Video Images by Computer Controlled Cameras and Its Application to TV Conference System
Proc. of IEEE Conference on Computer Vision and Pattern Recognition, vol.2, II-131 II-137, Dec. 2001. Production of Video Images by Computer Controlled Cameras and Its Application to TV Conference System
Edge detection. Goal: Identify sudden. an image. Ideal: artist s line drawing. object-level knowledge)
") Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Dynamic Stroke Information Analysis for Video-Based Handwritten Chinese Character Recognition
 Dynamic Stroke Information Analysis for Video-Based Handwritten Chinese Character Recognition Feng Lin and Xiaoou Tang Department of Information Engineering The Chinese University of Hong Kong Shatin,
Dynamic Stroke Information Analysis for Video-Based Handwritten Chinese Character Recognition Feng Lin and Xiaoou Tang Department of Information Engineering The Chinese University of Hong Kong Shatin,
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Face Tracking in Video
 Face Tracking in Video Hamidreza Khazaei and Pegah Tootoonchi Afshar Stanford University 350 Serra Mall Stanford, CA 94305, USA I. INTRODUCTION Object tracking is a hot area of research, and has many practical
Face Tracking in Video Hamidreza Khazaei and Pegah Tootoonchi Afshar Stanford University 350 Serra Mall Stanford, CA 94305, USA I. INTRODUCTION Object tracking is a hot area of research, and has many practical
차세대지능형자동차를위한신호처리기술 정호기
 차세대지능형자동차를위한신호처리기술 008.08. 정호기 E-mail: hgjung@mando.com hgjung@yonsei.ac.kr 0 . 지능형자동차의미래 ) 단위 system functions 운전자상황인식 얼굴방향인식 시선방향인식 졸음운전인식 운전능력상실인식 차선인식, 전방장애물검출및분류 Lane Keeping System + Adaptive Cruise
차세대지능형자동차를위한신호처리기술 008.08. 정호기 E-mail: hgjung@mando.com hgjung@yonsei.ac.kr 0 . 지능형자동차의미래 ) 단위 system functions 운전자상황인식 얼굴방향인식 시선방향인식 졸음운전인식 운전능력상실인식 차선인식, 전방장애물검출및분류 Lane Keeping System + Adaptive Cruise
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Available online at ScienceDirect. Procedia Computer Science 59 (2015 )
") Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 59 (2015 ) 550 558 International Conference on Computer Science and Computational Intelligence (ICCSCI 2015) The Implementation
Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 59 (2015 ) 550 558 International Conference on Computer Science and Computational Intelligence (ICCSCI 2015) The Implementation
Gesture Recognition using Neural Networks
 Gesture Recognition using Neural Networks Jeremy Smith Department of Computer Science George Mason University Fairfax, VA Email: jsmitq@masonlive.gmu.edu ABSTRACT A gesture recognition method for body
Gesture Recognition using Neural Networks Jeremy Smith Department of Computer Science George Mason University Fairfax, VA Email: jsmitq@masonlive.gmu.edu ABSTRACT A gesture recognition method for body
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Digital Image Forgery Detection Based on GLCM and HOG Features
 Digital Image Forgery Detection Based on GLCM and HOG Features Liya Baby 1, Ann Jose 2 Department of Electronics and Communication, Ilahia College of Engineering and Technology, Muvattupuzha, Ernakulam,
Digital Image Forgery Detection Based on GLCM and HOG Features Liya Baby 1, Ann Jose 2 Department of Electronics and Communication, Ilahia College of Engineering and Technology, Muvattupuzha, Ernakulam,
Computer Graphics and Image Processing
 Computer Graphics and Image Processing Lecture B2 Point Processing Joseph Niepce, 1826. The view from my window 1 Context How much input is used to compute an output value? Point Transforms Region Transforms
Computer Graphics and Image Processing Lecture B2 Point Processing Joseph Niepce, 1826. The view from my window 1 Context How much input is used to compute an output value? Point Transforms Region Transforms
Rendering. Converting a 3D scene to a 2D image. Camera. Light. Rendering. View Plane
 Rendering Pipeline Rendering Converting a 3D scene to a 2D image Rendering Light Camera 3D Model View Plane Rendering Converting a 3D scene to a 2D image Basic rendering tasks: Modeling: creating the world
Rendering Pipeline Rendering Converting a 3D scene to a 2D image Rendering Light Camera 3D Model View Plane Rendering Converting a 3D scene to a 2D image Basic rendering tasks: Modeling: creating the world
A Background Subtraction Based Video Object Detecting and Tracking Method
 A Background Subtraction Based Video Object Detecting and Tracking Method horng@kmit.edu.tw Abstract A new method for detecting and tracking mo tion objects in video image sequences based on the background
A Background Subtraction Based Video Object Detecting and Tracking Method horng@kmit.edu.tw Abstract A new method for detecting and tracking mo tion objects in video image sequences based on the background
AN EFFICIENT APPROACH FOR IMPROVING CANNY EDGE DETECTION ALGORITHM
 AN EFFICIENT APPROACH FOR IMPROVING CANNY EDGE DETECTION ALGORITHM Shokhan M. H. Department of Computer Science, Al-Anbar University, Iraq ABSTRACT Edge detection is one of the most important stages in
AN EFFICIENT APPROACH FOR IMPROVING CANNY EDGE DETECTION ALGORITHM Shokhan M. H. Department of Computer Science, Al-Anbar University, Iraq ABSTRACT Edge detection is one of the most important stages in
A Review on Virtual Mouse Using Hand Gesture and Color Detection
 A Review on Virtual Mouse Using Hand Gesture and Color Detection Nalini jungare ABSTRACT Now a day s intelligent machine which can be used along with the computer are being developed, which helps in friendly
A Review on Virtual Mouse Using Hand Gesture and Color Detection Nalini jungare ABSTRACT Now a day s intelligent machine which can be used along with the computer are being developed, which helps in friendly
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
CSE152 Introduction to Computer Vision Assignment 3 (SP15) Instructor: Ben Ochoa Maximum Points : 85 Deadline : 11:59 p.m., Friday, 29-May-2015
 Instructor: Ben Ochoa Maximum Points : 85 Deadline : 11:59 p.m., Friday, 29-May-2015") Instructions: CSE15 Introduction to Computer Vision Assignment 3 (SP15) Instructor: Ben Ochoa Maximum Points : 85 Deadline : 11:59 p.m., Friday, 9-May-015 This assignment should be solved, and written
Instructions: CSE15 Introduction to Computer Vision Assignment 3 (SP15) Instructor: Ben Ochoa Maximum Points : 85 Deadline : 11:59 p.m., Friday, 9-May-015 This assignment should be solved, and written
A Robust Method for Circle / Ellipse Extraction Based Canny Edge Detection
 International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 5, May 2015, PP 49-57 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) A Robust Method for Circle / Ellipse
International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 5, May 2015, PP 49-57 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) A Robust Method for Circle / Ellipse
Computational Optical Imaging - Optique Numerique. -- Multiple View Geometry and Stereo --
 Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Edge detection. Winter in Kraków photographed by Marcin Ryczek
 Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image
Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image
Comparison of Some Motion Detection Methods in cases of Single and Multiple Moving Objects
 Comparison of Some Motion Detection Methods in cases of Single and Multiple Moving Objects Shamir Alavi Electrical Engineering National Institute of Technology Silchar Silchar 788010 (Assam), India alavi1223@hotmail.com
Comparison of Some Motion Detection Methods in cases of Single and Multiple Moving Objects Shamir Alavi Electrical Engineering National Institute of Technology Silchar Silchar 788010 (Assam), India alavi1223@hotmail.com
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
9.913 Pattern Recognition for Vision. Class I - Overview. Instructors: B. Heisele, Y. Ivanov, T. Poggio
 9.913 Class I - Overview Instructors: B. Heisele, Y. Ivanov, T. Poggio TOC Administrivia Problems of Computer Vision and Pattern Recognition Overview of classes Quick review of Matlab Administrivia Instructors:
9.913 Class I - Overview Instructors: B. Heisele, Y. Ivanov, T. Poggio TOC Administrivia Problems of Computer Vision and Pattern Recognition Overview of classes Quick review of Matlab Administrivia Instructors:
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Photometric Stereo with Auto-Radiometric Calibration
 Photometric Stereo with Auto-Radiometric Calibration Wiennat Mongkulmann Takahiro Okabe Yoichi Sato Institute of Industrial Science, The University of Tokyo {wiennat,takahiro,ysato} @iis.u-tokyo.ac.jp
Photometric Stereo with Auto-Radiometric Calibration Wiennat Mongkulmann Takahiro Okabe Yoichi Sato Institute of Industrial Science, The University of Tokyo {wiennat,takahiro,ysato} @iis.u-tokyo.ac.jp
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
CS260. UI Toolkits. Björn Hartmann University of California, Berkeley EECS, Computer Science Division Fall 2010
 CS260 UI Toolkits Björn Hartmann University of California, Berkeley EECS, Computer Science Division Fall 2010 In the beginning cryptonomicon.com/beginning.html The Xerox Alto (1973) Event-Driven UIs Old
CS260 UI Toolkits Björn Hartmann University of California, Berkeley EECS, Computer Science Division Fall 2010 In the beginning cryptonomicon.com/beginning.html The Xerox Alto (1973) Event-Driven UIs Old
Mouse Pointer Tracking with Eyes
 Mouse Pointer Tracking with Eyes H. Mhamdi, N. Hamrouni, A. Temimi, and M. Bouhlel Abstract In this article, we expose our research work in Human-machine Interaction. The research consists in manipulating
Mouse Pointer Tracking with Eyes H. Mhamdi, N. Hamrouni, A. Temimi, and M. Bouhlel Abstract In this article, we expose our research work in Human-machine Interaction. The research consists in manipulating
Automatic Fatigue Detection System
 Automatic Fatigue Detection System T. Tinoco De Rubira, Stanford University December 11, 2009 1 Introduction Fatigue is the cause of a large number of car accidents in the United States. Studies done by
Automatic Fatigue Detection System T. Tinoco De Rubira, Stanford University December 11, 2009 1 Introduction Fatigue is the cause of a large number of car accidents in the United States. Studies done by
Learning based face hallucination techniques: A survey
 Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Color Space Invariance for Various Edge Types in Simple Images. Geoffrey Hollinger and Dr. Bruce Maxwell Swarthmore College Summer 2003
 Color Space Invariance for Various Edge Types in Simple Images Geoffrey Hollinger and Dr. Bruce Maxwell Swarthmore College Summer 2003 Abstract This paper describes a study done to determine the color
Color Space Invariance for Various Edge Types in Simple Images Geoffrey Hollinger and Dr. Bruce Maxwell Swarthmore College Summer 2003 Abstract This paper describes a study done to determine the color
PERFORMANCE ANALYSIS OF CANNY AND OTHER COMMONLY USED EDGE DETECTORS Sandeep Dhawan Director of Technology, OTTE, NEW YORK
 International Journal of Science, Environment and Technology, Vol. 3, No 5, 2014, 1759 1766 ISSN 2278-3687 (O) PERFORMANCE ANALYSIS OF CANNY AND OTHER COMMONLY USED EDGE DETECTORS Sandeep Dhawan Director
International Journal of Science, Environment and Technology, Vol. 3, No 5, 2014, 1759 1766 ISSN 2278-3687 (O) PERFORMANCE ANALYSIS OF CANNY AND OTHER COMMONLY USED EDGE DETECTORS Sandeep Dhawan Director
PA2 Introduction to Tracking. Connected Components. Moving Object Detection. Pixel Grouping. After Pixel Grouping 2/19/17. Any questions?
 /19/17 PA Introduction to Tracking Any questions? Yes, its due Monday. CS 510 Lecture 1 February 15, 017 Moving Object Detection Assuming a still camera Two algorithms: Mixture of Gaussians (Stauffer Grimson)
/19/17 PA Introduction to Tracking Any questions? Yes, its due Monday. CS 510 Lecture 1 February 15, 017 Moving Object Detection Assuming a still camera Two algorithms: Mixture of Gaussians (Stauffer Grimson)
Edge detection. Winter in Kraków photographed by Marcin Ryczek
 Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, edges carry most of the semantic and shape information
Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, edges carry most of the semantic and shape information
PROJECTILE MOTION PURPOSE
 PURPOSE The purpose of this experiment is to study the motion of an object in two dimensions. The motion of the projectile is analyzed using Newton's laws of motion. During the motion of the projectile,
PURPOSE The purpose of this experiment is to study the motion of an object in two dimensions. The motion of the projectile is analyzed using Newton's laws of motion. During the motion of the projectile,
Edge and Texture. CS 554 Computer Vision Pinar Duygulu Bilkent University
 Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Comparison between Various Edge Detection Methods on Satellite Image
 Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION
 CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
Tracking. Hao Guan( 管皓 ) School of Computer Science Fudan University
 School of Computer Science Fudan University") Tracking Hao Guan( 管皓 ) School of Computer Science Fudan University 2014-09-29 Multimedia Video Audio Use your eyes Video Tracking Use your ears Audio Tracking Tracking Video Tracking Definition Given
Tracking Hao Guan( 管皓 ) School of Computer Science Fudan University 2014-09-29 Multimedia Video Audio Use your eyes Video Tracking Use your ears Audio Tracking Tracking Video Tracking Definition Given
Lecture 9: Epipolar Geometry
 Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
I. INTRODUCTION. Figure-1 Basic block of text analysis
 ISSN: 2349-7637 (Online) (RHIMRJ) Research Paper Available online at: www.rhimrj.com Detection and Localization of Texts from Natural Scene Images: A Hybrid Approach Priyanka Muchhadiya Post Graduate Fellow,
ISSN: 2349-7637 (Online) (RHIMRJ) Research Paper Available online at: www.rhimrj.com Detection and Localization of Texts from Natural Scene Images: A Hybrid Approach Priyanka Muchhadiya Post Graduate Fellow,
Indian Institute of Technology Kanpur District : Kanpur Team number: 2. Prof. A. K. Chaturvedi SANKET
 CSIDC 2003 Interim Report Country : India University : Indian Institute of Technology Kanpur District : Kanpur 208016 Team number: 2 Mentor: Prof. A. K. Chaturvedi akc@iitk.ac.in +91-512-2597613 SANKET:
CSIDC 2003 Interim Report Country : India University : Indian Institute of Technology Kanpur District : Kanpur 208016 Team number: 2 Mentor: Prof. A. K. Chaturvedi akc@iitk.ac.in +91-512-2597613 SANKET:
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
A Cheap Portable Eye-Tracker Solution for Common Setups
 A Cheap Portable Eye-Tracker Solution for Common Setups Onur Ferhat and Fernando Vilariño Computer Vision Center and Computer Science Dpt., Univ. Autònoma de Barcelona, Bellaterra, Barcelona, Spain We
A Cheap Portable Eye-Tracker Solution for Common Setups Onur Ferhat and Fernando Vilariño Computer Vision Center and Computer Science Dpt., Univ. Autònoma de Barcelona, Bellaterra, Barcelona, Spain We
A Study on Similarity Computations in Template Matching Technique for Identity Verification
 A Study on Similarity Computations in Template Matching Technique for Identity Verification Lam, S. K., Yeong, C. Y., Yew, C. T., Chai, W. S., Suandi, S. A. Intelligent Biometric Group, School of Electrical
A Study on Similarity Computations in Template Matching Technique for Identity Verification Lam, S. K., Yeong, C. Y., Yew, C. T., Chai, W. S., Suandi, S. A. Intelligent Biometric Group, School of Electrical
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 (Hybrid Images) is now on the course webpage (see Projects link) Due Wednesday, Feb 15, by 11:59pm
CS5670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 (Hybrid Images) is now on the course webpage (see Projects link) Due Wednesday, Feb 15, by 11:59pm
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Adaptive Zoom Distance Measuring System of Camera Based on the Ranging of Binocular Vision
 Adaptive Zoom Distance Measuring System of Camera Based on the Ranging of Binocular Vision Zhiyan Zhang 1, Wei Qian 1, Lei Pan 1 & Yanjun Li 1 1 University of Shanghai for Science and Technology, China
Adaptive Zoom Distance Measuring System of Camera Based on the Ranging of Binocular Vision Zhiyan Zhang 1, Wei Qian 1, Lei Pan 1 & Yanjun Li 1 1 University of Shanghai for Science and Technology, China
Scanner Parameter Estimation Using Bilevel Scans of Star Charts
 Boise State University ScholarWorks Electrical and Computer Engineering Faculty Publications and Presentations Department of Electrical and Computer Engineering 1-1-2001 Scanner Parameter Estimation Using
Boise State University ScholarWorks Electrical and Computer Engineering Faculty Publications and Presentations Department of Electrical and Computer Engineering 1-1-2001 Scanner Parameter Estimation Using
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Writer Recognizer for Offline Text Based on SIFT
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 4, Issue. 5, May 2015, pg.1057
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 4, Issue. 5, May 2015, pg.1057
Evaluation of Moving Object Tracking Techniques for Video Surveillance Applications
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
EECS 442 Computer vision. Fitting methods
 EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
AUTOMATED THRESHOLD DETECTION FOR OBJECT SEGMENTATION IN COLOUR IMAGE
 AUTOMATED THRESHOLD DETECTION FOR OBJECT SEGMENTATION IN COLOUR IMAGE Md. Akhtaruzzaman, Amir A. Shafie and Md. Raisuddin Khan Department of Mechatronics Engineering, Kulliyyah of Engineering, International
AUTOMATED THRESHOLD DETECTION FOR OBJECT SEGMENTATION IN COLOUR IMAGE Md. Akhtaruzzaman, Amir A. Shafie and Md. Raisuddin Khan Department of Mechatronics Engineering, Kulliyyah of Engineering, International
Color Content Based Image Classification
 Color Content Based Image Classification Szabolcs Sergyán Budapest Tech sergyan.szabolcs@nik.bmf.hu Abstract: In content based image retrieval systems the most efficient and simple searches are the color
Color Content Based Image Classification Szabolcs Sergyán Budapest Tech sergyan.szabolcs@nik.bmf.hu Abstract: In content based image retrieval systems the most efficient and simple searches are the color
Requirements for region detection
 Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
Real time eye detection using edge detection and euclidean distance
 Vol. 6(20), Apr. 206, PP. 2849-2855 Real time eye detection using edge detection and euclidean distance Alireza Rahmani Azar and Farhad Khalilzadeh (BİDEB) 2 Department of Computer Engineering, Faculty
Vol. 6(20), Apr. 206, PP. 2849-2855 Real time eye detection using edge detection and euclidean distance Alireza Rahmani Azar and Farhad Khalilzadeh (BİDEB) 2 Department of Computer Engineering, Faculty
CS1114: Study Guide 2
 CS4: Study Guide 2 This document covers the topics we ve covered in the second part of the course. Please refer to the class slides for more details. Polygons and convex hulls A polygon is a set of 2D
CS4: Study Guide 2 This document covers the topics we ve covered in the second part of the course. Please refer to the class slides for more details. Polygons and convex hulls A polygon is a set of 2D
Computer Vision
 15-780 Computer Vision J. Zico Kolter April 2, 2014 1 Outline Basics of computer images Image processing Image features Object recognition 2 Outline Basics of computer images Image processing Image features
15-780 Computer Vision J. Zico Kolter April 2, 2014 1 Outline Basics of computer images Image processing Image features Object recognition 2 Outline Basics of computer images Image processing Image features
CPSC 425: Computer Vision
 1 / 45 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 45 Menu March 3, 2016 Topics: Hough
1 / 45 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 45 Menu March 3, 2016 Topics: Hough
Automated Digital Conversion of Hand-Drawn Plots
 Automated Digital Conversion of Hand-Drawn Plots Ruo Yu Gu Department of Electrical Engineering Stanford University Palo Alto, U.S.A. ruoyugu@stanford.edu Abstract An algorithm has been developed using
Automated Digital Conversion of Hand-Drawn Plots Ruo Yu Gu Department of Electrical Engineering Stanford University Palo Alto, U.S.A. ruoyugu@stanford.edu Abstract An algorithm has been developed using
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Multiview Pedestrian Detection Based on Online Support Vector Machine Using Convex Hull
 Multiview Pedestrian Detection Based on Online Support Vector Machine Using Convex Hull Revathi M K 1, Ramya K P 2, Sona G 3 1, 2, 3 Information Technology, Anna University, Dr.Sivanthi Aditanar College
Multiview Pedestrian Detection Based on Online Support Vector Machine Using Convex Hull Revathi M K 1, Ramya K P 2, Sona G 3 1, 2, 3 Information Technology, Anna University, Dr.Sivanthi Aditanar College
HeadMouse. Robotic Research Team. University of Lleida
 HeadMouse Robotic Research Team University of Lleida User Manual and Frequently Asked Questions What is HeadMouse? HeadMouse is a free program designed to replace the computer mouse. The user can control
HeadMouse Robotic Research Team University of Lleida User Manual and Frequently Asked Questions What is HeadMouse? HeadMouse is a free program designed to replace the computer mouse. The user can control
A Robust and Efficient Motion Segmentation Based on Orthogonal Projection Matrix of Shape Space
 A Robust and Efficient Motion Segmentation Based on Orthogonal Projection Matrix of Shape Space Naoyuki ICHIMURA Electrotechnical Laboratory 1-1-4, Umezono, Tsukuba Ibaraki, 35-8568 Japan ichimura@etl.go.jp
A Robust and Efficient Motion Segmentation Based on Orthogonal Projection Matrix of Shape Space Naoyuki ICHIMURA Electrotechnical Laboratory 1-1-4, Umezono, Tsukuba Ibaraki, 35-8568 Japan ichimura@etl.go.jp
Fingertips Tracking based on Gradient Vector
 Int. J. Advance Soft Compu. Appl, Vol. 7, No. 3, November 2015 ISSN 2074-8523 Fingertips Tracking based on Gradient Vector Ahmad Yahya Dawod 1, Md Jan Nordin 1, and Junaidi Abdullah 2 1 Pattern Recognition
Int. J. Advance Soft Compu. Appl, Vol. 7, No. 3, November 2015 ISSN 2074-8523 Fingertips Tracking based on Gradient Vector Ahmad Yahya Dawod 1, Md Jan Nordin 1, and Junaidi Abdullah 2 1 Pattern Recognition
Face Detection and Recognition in an Image Sequence using Eigenedginess
 Face Detection and Recognition in an Image Sequence using Eigenedginess B S Venkatesh, S Palanivel and B Yegnanarayana Department of Computer Science and Engineering. Indian Institute of Technology, Madras
Face Detection and Recognition in an Image Sequence using Eigenedginess B S Venkatesh, S Palanivel and B Yegnanarayana Department of Computer Science and Engineering. Indian Institute of Technology, Madras
Mouse Simulation Using Two Coloured Tapes
 Mouse Simulation Using Two Coloured Tapes Kamran Niyazi 1, Vikram Kumar 2, Swapnil Mahe 3 and Swapnil Vyawahare 4 Department of Computer Engineering, AISSMS COE, University of Pune, India kamran.niyazi@gmail.com
Mouse Simulation Using Two Coloured Tapes Kamran Niyazi 1, Vikram Kumar 2, Swapnil Mahe 3 and Swapnil Vyawahare 4 Department of Computer Engineering, AISSMS COE, University of Pune, India kamran.niyazi@gmail.com
IMAGE PROCESSING >FILTERS AND EDGE DETECTION FOR COLOR IMAGES UTRECHT UNIVERSITY RONALD POPPE
 IMAGE PROCESSING >FILTERS AND EDGE DETECTION FOR COLOR IMAGES UTRECHT UNIVERSITY RONALD POPPE OUTLINE Filters for color images Edge detection for color images Canny edge detection FILTERS FOR COLOR IMAGES
IMAGE PROCESSING >FILTERS AND EDGE DETECTION FOR COLOR IMAGES UTRECHT UNIVERSITY RONALD POPPE OUTLINE Filters for color images Edge detection for color images Canny edge detection FILTERS FOR COLOR IMAGES
Writer Authentication Based on the Analysis of Strokes
 Writer Authentication Based on the Analysis of Strokes Kun Yu, Yunhong Wang, Tieniu Tan * NLPR, Institute of Automation, Chinese Academy of Sciences, Beijing, 00080 P.R.China ABSTRACT This paper presents
Writer Authentication Based on the Analysis of Strokes Kun Yu, Yunhong Wang, Tieniu Tan * NLPR, Institute of Automation, Chinese Academy of Sciences, Beijing, 00080 P.R.China ABSTRACT This paper presents
Motion Detection Algorithm
 Volume 1, No. 12, February 2013 ISSN 2278-1080 The International Journal of Computer Science & Applications (TIJCSA) RESEARCH PAPER Available Online at http://www.journalofcomputerscience.com/ Motion Detection
Volume 1, No. 12, February 2013 ISSN 2278-1080 The International Journal of Computer Science & Applications (TIJCSA) RESEARCH PAPER Available Online at http://www.journalofcomputerscience.com/ Motion Detection
COMP371 COMPUTER GRAPHICS
 COMP371 COMPUTER GRAPHICS LECTURE 14 RASTERIZATION 1 Lecture Overview Review of last class Line Scan conversion Polygon Scan conversion Antialiasing 2 Rasterization The raster display is a matrix of picture
COMP371 COMPUTER GRAPHICS LECTURE 14 RASTERIZATION 1 Lecture Overview Review of last class Line Scan conversion Polygon Scan conversion Antialiasing 2 Rasterization The raster display is a matrix of picture
3D from Photographs: Automatic Matching of Images. Dr Francesco Banterle
 3D from Photographs: Automatic Matching of Images Dr Francesco Banterle francesco.banterle@isti.cnr.it 3D from Photographs Automatic Matching of Images Camera Calibration Photographs Surface Reconstruction
3D from Photographs: Automatic Matching of Images Dr Francesco Banterle francesco.banterle@isti.cnr.it 3D from Photographs Automatic Matching of Images Camera Calibration Photographs Surface Reconstruction
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
IMPACT OF SUBPIXEL PARADIGM ON DETERMINATION OF 3D POSITION FROM 2D IMAGE PAIR Lukas Sroba, Rudolf Ravas
 162 International Journal "Information Content and Processing", Volume 1, Number 2, 2014 IMPACT OF SUBPIXEL PARADIGM ON DETERMINATION OF 3D POSITION FROM 2D IMAGE PAIR Lukas Sroba, Rudolf Ravas Abstract:
162 International Journal "Information Content and Processing", Volume 1, Number 2, 2014 IMPACT OF SUBPIXEL PARADIGM ON DETERMINATION OF 3D POSITION FROM 2D IMAGE PAIR Lukas Sroba, Rudolf Ravas Abstract:
Image retrieval based on bag of images
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2009 Image retrieval based on bag of images Jun Zhang University of Wollongong
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2009 Image retrieval based on bag of images Jun Zhang University of Wollongong
Interface for Digital Notes Using Stylus Motions Made in the Air
 Interface for Digital Notes Using Stylus Motions Made in the Air Yu Suzuki Kazuo Misue Jiro Tanaka Department of Computer Science, University of Tsukuba {suzuki, misue, jiro}@iplab.cs.tsukuba.ac.jp Abstract
Interface for Digital Notes Using Stylus Motions Made in the Air Yu Suzuki Kazuo Misue Jiro Tanaka Department of Computer Science, University of Tsukuba {suzuki, misue, jiro}@iplab.cs.tsukuba.ac.jp Abstract
Object and Class Recognition I:
 Object and Class Recognition I: Object Recognition Lectures 10 Sources ICCV 2005 short courses Li Fei-Fei (UIUC), Rob Fergus (Oxford-MIT), Antonio Torralba (MIT) http://people.csail.mit.edu/torralba/iccv2005
Object and Class Recognition I: Object Recognition Lectures 10 Sources ICCV 2005 short courses Li Fei-Fei (UIUC), Rob Fergus (Oxford-MIT), Antonio Torralba (MIT) http://people.csail.mit.edu/torralba/iccv2005
University of Minnesota Nano Fabrication Center Standard Operating Procedure
 Equipment Name: University of Minnesota Nano Fabrication Center Coral Name: hs-scope Revision Number: 1.5 Model: HS200A Revisionist: M. Fisher Location: Bay 1 Date: 9/12/2013 1 Description The Hyphenated
Equipment Name: University of Minnesota Nano Fabrication Center Coral Name: hs-scope Revision Number: 1.5 Model: HS200A Revisionist: M. Fisher Location: Bay 1 Date: 9/12/2013 1 Description The Hyphenated
Image Comparison on the Base of a Combinatorial Matching Algorithm
 Image Comparison on the Base of a Combinatorial Matching Algorithm Benjamin Drayer Department of Computer Science, University of Freiburg Abstract. In this paper we compare images based on the constellation
Image Comparison on the Base of a Combinatorial Matching Algorithm Benjamin Drayer Department of Computer Science, University of Freiburg Abstract. In this paper we compare images based on the constellation
A Real-Time Hand Gesture Recognition for Dynamic Applications
 e-issn 2455 1392 Volume 2 Issue 2, February 2016 pp. 41-45 Scientific Journal Impact Factor : 3.468 http://www.ijcter.com A Real-Time Hand Gesture Recognition for Dynamic Applications Aishwarya Mandlik
e-issn 2455 1392 Volume 2 Issue 2, February 2016 pp. 41-45 Scientific Journal Impact Factor : 3.468 http://www.ijcter.com A Real-Time Hand Gesture Recognition for Dynamic Applications Aishwarya Mandlik