Performance Measures and the DukeMTMC Benchmark for Multi-Target Multi-Camera Tracking. Ergys Ristani
|
|
|
- Justina Burke
- 6 years ago
- Views:
Transcription


1 Performance Measures and the DukeMTMC Benchmark for Multi-Target Multi-Camera Tracking Ergys Ristani



2 In collaboration with: Francesco Solera Roger Zou Rita Cucchiara Carlo Tomasi
3 Outline Problem Definition Performance Measures DukeMTMCT Benchmark Summary
4 Problem Definition DukeMTMCT Benchmark Multi-Target Multi-Camera Tracking Given n camera streams, determine who/what is where at all times
5 Problem Definition DukeMTMCT Benchmark Multi-Target Multi-Camera Tracking Given n camera streams, determine who/what is where at all times
6 Problem Definition Multi-Target Multi-Camera Tracking Given n camera streams, determine who/what is where at all times MTMCT Evaluation DukeMTMCT Benchmark How well does a tracker determine who/what is where at all times?
7 Evaluation Paradigms Suspect
8 Evaluation Paradigms Computed IDs ID1 Tracker (a) Suspect
9 Evaluation Paradigms Computed IDs ID1 ID2 Tracker (a) Suspect
10 Evaluation Paradigms Computed IDs ID1 ID2 Tracker (a) Suspect 1 switch
11 Evaluation Paradigms Computed IDs ID1 ID2 Tracker (a) Suspect 1 switch 67% identification
12 Evaluation Paradigms Computed IDs ID1 ID2 Tracker (a) Suspect 1 switch 67% identification Tracker (b) Suspect
13 Evaluation Paradigms Computed IDs ID1 ID2 Tracker (a) Suspect 1 switch 67% identification Tracker (b) Suspect 7 switches 67% identification
14 Evaluation Paradigms Computed IDs ID1 ID2 Tracker (a) Suspect 1 switch 67% identification Tracker (b) Suspect 7 switches 67% identification Tracker (c) Suspect 7 switches 83% identification
15 Evaluation Paradigms Computed IDs ID1 ID2 Tracker (a) Suspect 1 switch 67% identification Tracker (b) Suspect 7 switches 67% identification Tracker (c) Suspect Researcher: How often does the tracker switch identities? 7 switches 83% identification
16 Evaluation Paradigms Computed IDs ID1 ID2 Tracker (a) Suspect 1 switch 67% identification Tracker (b) Suspect 7 switches 67% identification Tracker (c) Suspect 7 switches 83% identification
 Suspect End-user: How well does the tracker explain identity?")
17 Evaluation Paradigms Computed IDs ID1 ID2 Tracker (a) Suspect 1 switch 67% identification Tracker (b) Suspect 7 switches 67% identification Tracker (c) Suspect End-user: How well does the tracker explain identity? 7 switches 83% identification
18 Evaluation Paradigms Computed IDs ID1 ID2 Tracker (a) Suspect 1 switch 67% identification Tracker (b) Suspect 7 switches 67% identification Tracker (c) Suspect 7 switches 83% identification
19 Outline Problem Definition Performance Measures Existing Measures Issues Identity Measures DukeMTMCT Benchmark Summary
20 Performance Measures MTMC Tracker Performance
21 Performance Measures Interaction model Object detection Optimization Appearance model Parameter tuning Training data Motion model
22 Performance Measures MTMC Tracker Performance
23 Performance Measures MOTA IDS MTMC Tracker Performance MT ML FRG [1] Evaluating Multiple Object Tracking Performance: The CLEAR MOT Metrics. Image Video Proc [2] Learning to Associate: HybridBoosted Multi-Target Tracker for Crowded Scene. CVPR 2009
24 Performance Measures MOTA IDS MT ML FRG MTMC Tracker Performance MCTA Handover (X, FRG) [3] An Equalized Global Graph Model-Based Approach for Multi-Camera Object Tracking. IEEE TCAS 2016 [4] Inter-camera Association of Multi-target Tracks by On-Line Learned Appearance Affinity Models. ECCV 2010
25 Performance Measures MOTA IDS MT ML FRG MTMC Tracker Performance MCTA Handover (X, FRG)
26 [5] Framework for Performance Evaluation of Face, Text, and Vehicle Detection and Tracking in Video: Data, Metrics, and Protocol. TPAMI 2008 [6] A New Benchmark and Protocol for Multi-Object Detection and Tracking. arxiv CoRR 2015 [7] Evaluating Multi-Object Tracking. CVPRWS 2005 Performance Measures PR-MOTA MOTA IDS MCTA FIO FIT STDA-D ATA MT ML FRG MTMC Tracker Performance Handover (X, FRG) TP OP
27 Errors in Tracking Mismatches Fragmentations T 1 True Computed C 1 C 2 Merges T 1 T 2 C 1 False Positives/Negatives T 1 C 2
28 Key Evaluation Steps T 1 C 1 C 3 True Computed C 2 T 2
29 Key Evaluation Steps Truth-to-Result Matching T 1 C 1 C 3 True Computed C 2 T 2
30 Key Evaluation Steps Truth-to-Result Matching T 1 C 1 C 3 True Computed C 2 Scoring Function T 2
31 Key Evaluation Steps Truth-to-Result Matching T 1 C 1 C 3 True Computed C 2 Scoring Function T 2 PR-MOTA STDA-D ATA MOTA IDS MT ML MTMC Tracker Performance FRG MCTA Handover (X, FRG) FIO FIT OP TP
32 Key Evaluation Steps Truth-to-Result Matching T 1 C 1 C 3 True Computed C 2 Scoring Function T 2 PR-MOTA STDA-D ATA MOTA IDS MT ML MTMC Tracker Performance FRG MCTA Handover (X, FRG) FIO FIT OP TP
33 CLEAR MOT Mapping At each frame t Preserve mapping of detections from frame t-1 if still valid Solve bipartite matching at frame t for unmapped detections T 1 C 1 C 3 True Computed C 2 T 2 time
34 CLEAR MOT Mapping At each frame t Preserve mapping of detections from frame t-1 if still valid Solve bipartite matching at frame t for unmapped detections T 1 C 1 C 3 True Computed C 2 T time
35 CLEAR MOT Mapping At each frame t Preserve mapping of detections from frame t-1 if still valid Solve bipartite matching at frame t for unmapped detections T 1 C 1 C 3 True Computed C 2 T time
36 CLEAR MOT Mapping At each frame t Preserve mapping of detections from frame t-1 if still valid Solve bipartite matching at frame t for unmapped detections T 1 C 1 C 3 True Computed C 2 T time
37 CLEAR MOT Mapping At each frame t Preserve mapping of detections from frame t-1 if still valid Solve bipartite matching at frame t for unmapped detections T 1 C 1 C 3 True Computed C 2 T time
38 CLEAR MOT Mapping At each frame t Preserve mapping of detections from frame t-1 if still valid Solve bipartite matching at frame t for unmapped detections T 1 C 1 C 3 True Computed C 2 T time
39 CLEAR MOT Mapping At each frame t Preserve mapping of detections from frame t-1 if still valid Solve bipartite matching at frame t for unmapped detections T 1 C 1 C 3 True Computed C 2 T time
40 CLEAR MOT Mapping At each frame t Preserve mapping of detections from frame t-1 if still valid Solve bipartite matching at frame t for unmapped detections T 1 C 1 C 3 True Computed C 2 T time
41 CLEAR MOT Mapping At each frame t Preserve mapping of detections from frame t-1 if still valid Solve bipartite matching at frame t for unmapped detections T 1 C 1 C 3 True Computed C 2 T time
42 Key Evaluation Steps Truth-to-Result Matching T 1 C 1 C 3 True Computed C 2 Scoring Function T 2 PR-MOTA STDA-D ATA MOTA IDS MT ML MTMC Tracker Performance FRG MCTA Handover (X, FRG) FIO FIT OP TP
43 Key Evaluation Steps Truth-to-Result Matching T 1 C 1 C 3 True Computed C 2 Scoring Function T 2 PR-MOTA STDA-D ATA MOTA IDS MT ML MTMC Tracker Performance FRG MCTA Handover (X, FRG) FIO FIT OP TP
44 Key Evaluation Steps Truth-to-Result Matching T 1 C 1 C 3 True Computed C 2 Scoring Function T 2 PR-MOTA STDA-D ATA MOTA IDS MT ML MTMC Tracker Performance FRG MCTA Handover (X, FRG) FIO FIT OP TP
45 Common Scoring Functions Multiple Object Tracking Accuracy (MOTA) Multiple Camera Tracking Accuracy (MCTA) Trajectory Scores MT, PT, ML Handover Errors
46 Outline Problem Definition Performance Measures Existing Measures Issues Identity Measures DukeMTMCT Benchmark Summary
47 Issues Truth-to-Result Matching T 1 C 1 C 3 True Computed C 2 Scoring Function T 2 PR-MOTA STDA-D ATA MOTA IDS MT ML MTMC Tracker Performance FRG MCTA Handover (X, FRG) FIO FIT OP TP
48 Issues Truth-to-Result Matching T 1 C 1 C 3 True Computed C 2 Scoring Function T 2 PR-MOTA STDA-D ATA MOTA IDS MT ML MTMC Tracker Performance FRG MCTA Handover (X, FRG) FIO FIT OP TP
49 CLEAR MOT Mapping Identity mapping bijective at each frame Not bijective overall T 1 C 1 T 2 C 2 T 1 C 1 C 3 True Computed C 2 T 2 time
50 Issues Truth-to-Result Matching T 1 C 1 C 3 True Computed C 2 Scoring Function T 2 PR-MOTA STDA-D ATA MOTA IDS MT ML MTMC Tracker Performance FRG MCTA Handover (X, FRG) FIO FIT OP TP
51 Scoring Functions Multiple Object Tracking Accuracy (MOTA) Multiple Camera Tracking Accuracy (MCTA) Trajectory Scores MT, PT, ML Handover Errors
52 Scoring Functions Multiple Object Tracking Accuracy (MOTA) Multiple Camera Tracking Accuracy (MCTA) Trajectory Scores MT, PT, ML Handover Errors Brittle due to mapping
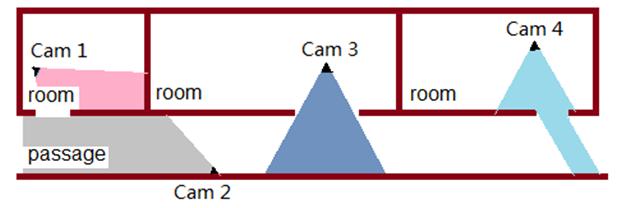
53 Handover Errors Camera 1 Camera 2 Truth A A A A A A A A A A A A A A A A
54 Handover Errors Camera 1 Camera 2 Truth A A A A A A A A A A A A A A A A Tracker 1 b b b b b b b c b b b b b b b b time
55 Handover Errors Camera 1 Camera 2 Truth A A A A A A A A A A A A A A A A Tracker 1 b b b b b b b c b b b b b b b b time
56 Handover Errors Camera 1 Camera 2 Truth A A A A A A A A A A A A A A A A Tracker 1 b b b b b b b c b b b b b b b b Tracker 2 b b b b b b b b b b b b b b b time
57 Handover Errors Camera 1 Camera 2 Truth A A A A A A A A A A A A A A A A Tracker 1 b b b b b b b c b b b b b b b b Tracker 2 b b b b b b b b b b b b b b b time
58 Scoring Functions Multiple Object Tracking Accuracy (MOTA) Multiple Camera Tracking Accuracy (MCTA) Trajectory Scores MT, PT, ML Ignore identity Handover Errors
59 Trajectory Scores Truth A A A A A A A A A A time
60 Trajectory Scores Truth A A A A A A A A A A time Mostly Tracked: GT trajectories which are covered by tracker output for more than 80% in length
61 Trajectory Scores Truth A A A A A A A A A A Tracker 1 b b c c e e g g f f time Mostly Tracked: GT trajectories which are covered by tracker output for more than 80% in length
62 Trajectory Scores Truth A A A A A A A A A A Tracker 1 b b c c e e g g f f MT = 1 time Mostly Tracked: GT trajectories which are covered by tracker output for more than 80% in length
63 Trajectory Scores Truth A A A A A A A A A A Tracker b b c c b g g g b b MT = 1 FRG = 4 time Mostly Tracked: Percentage of GT trajectories which are covered by tracker output for more than 80% in length Fragments: The number of times that a GT trajectory is interrupted in tracking result
64 Trajectory Scores Truth A A A A A A A A A A Tracker b b c c e e g g f f MT = 1 FRG = 4 time
65 Trajectory Scores Truth A A A A A A A A A A Tracker b b c c e e g g f f MT = 1 FRG = 4 Tracker++ b b c b b g b g b b time
66 Trajectory Scores Truth A A A A A A A A A A Tracker b b c c e e g g f f MT = 1 FRG = 4 Tracker++ b b c b b g b g b b MT = 1 FRG = 4 time
67 Scoring Functions Multiple Object Tracking Accuracy (MOTA) Multiple Camera Tracking Accuracy (MCTA) Bizarre combination Trajectory Scores MT, PT, ML Handover Errors
68 MCTA Camera 1 Camera 2 Truth A A A A A A A A A A A A A A A A Tracker 1 b b b b b b b c b b b b b b b b Tracker 2 b b b b b b c b b b b b b b b b time
69 MCTA Camera 1 Camera 2 Truth A A A A A A A A A A A A A A A A Tracker 1 b b b b b b b c b b b b b b b b Tracker 2 b b b b b b c b b b b b b b b b time Tracker 1 Fragmentations Handover Within camera Tracker 2

70 MCTA Camera 1 Camera 2 Truth A A A A A A A A A A A A A A A A Tracker 1 b b b b b b b c b b b b b b b b Tracker 2 b b b b b b c b b b b b b b b b time Tracker 1 Fragmentations Handover Within camera Tracker 2
 Mapping not one-to-one Trajectory Scores MT, PT, ML Handover Errors")
71 Scoring Functions Multiple Object Tracking Accuracy (MOTA) Multiple Camera Tracking Accuracy (MCTA) Mapping not one-to-one Trajectory Scores MT, PT, ML Handover Errors
72 MOTA True Computed A A A A A A A A b b b b c c c c time True A A A A A A A A Computed b b b b b b b c time
73 MOTA True Computed A A A A A A A A b b b b c c c c Half explanation time True A A A A A A A A Computed b b b b b b b c Nearly full explanation time
74 Outline Problem Definition Performance Measures Existing Measures Issues Identity Measures DukeMTMCT Benchmark Summary
75 Identity Measures Truth-to-Result Matching T 1 C 1 C 3 True Computed C 2 Scoring Function T 2 PR-MOTA STDA-D ATA MOTA IDS MT ML MTMC Tracker Performance FRG MCTA Handover (X, FRG) FIO FIT OP TP
76 Identity Measures Proposed Truth-to-Result Matching Camera 1 Camera 2 True A A A A A A A A A A A A A A A A Computed b b b b b b c c b b b b b b time
77 Identity Measures Proposed Truth-to-Result Matching Camera 1 Camera 2 True A A A A A A A A A A A A A A A A Computed b b b b b b c c b b b b b b time A b c
78 Identity Measures Proposed Truth-to-Result Matching Camera 1 Camera 2 True A A A A A A A A A A A A A A A A Computed b b b b b b c c b b b b b b time A b c Cost on each edge is number of mis-assigned frames between two trajectories
79 Identity Measures Proposed Truth-to-Result Matching Camera 1 Camera 2 True A A A A A A A A A A A A A A A A Computed b b b b b b b b b b b b time A 4 b Cost on each edge is number of mis-assigned frames between two trajectories
80 Identity Measures Proposed Truth-to-Result Matching Camera 1 Camera 2 True A A A A A A A A A A A A A A A A Computed b b b b b b c c b b b b b b time A b c Cost on each edge is number of mis-assigned frames between two trajectories
81 Identity Measures Proposed Truth-to-Result Matching Camera 1 Camera 2 True Computed A A A A A A A A A A A A A A A A c c time A 14 c Cost on each edge is number of mis-assigned frames between two trajectories
82 Identity Measures Proposed Truth-to-Result Matching Camera 1 Camera 2 True A A A A A A A A A A A A A A A A Computed b b b b b b c c b b b b b b time A b c Cost on each edge is number of mis-assigned frames between two trajectories
83 Identity Measures Proposed Truth-to-Result Matching Camera 1 Camera 2 True Computed A A A A A A A A A A A A A A A A time A 16 Cost on each edge is number of mis-assigned frames between two trajectories
84 Identity Measures Proposed Truth-to-Result Matching Camera 1 Camera 2 True A A A A A A A A A A A A A A A A Computed b b b b b b c c b b b b b b time A b c Cost on each edge is number of mis-assigned frames between two trajectories
85 Identity Measures Proposed Truth-to-Result Matching True Camera 1 Camera 2 Computed b b b b b b b b b b b b time b 12 Cost on each edge is number of mis-assigned frames between two trajectories
86 Identity Measures Proposed Truth-to-Result Matching Camera 1 Camera 2 True A A A A A A A A A A A A A A A A Computed b b b b b b c c b b b b b b time A b c Cost on each edge is number of mis-assigned frames between two trajectories
87 Identity Measures Truth-to-Result Matching T 1 C 1 C 3 True Computed C 2 Scoring Function T 2 PR-MOTA STDA-D ATA MOTA IDS MT ML MTMC Tracker Performance FRG MCTA Handover (X, FRG) FIO FIT OP TP
88 Identity Measures Truth-to-Result Matching T 1 C 1 C 3 True Computed C 2 Scoring Function T 2 PR-MOTA STDA-D ATA MOTA IDS MT ML MTMC Tracker Performance FRG MCTA Handover (X, FRG) FIO FIT OP TP
89 Identity Measures Truth-to-Result Matching T 1 C 1 C 3 True Computed C 2 Scoring Function T 2 PR-MOTA STDA-D ATA MOTA IDS MT ML MTMC Tracker Performance FRG MCTA Handover (X, FRG) FIO FIT OP TP
90 Identity Measures Proposed Scores ID Precision ID Recall F 1 -score False Negatives True Positives False Positives True Detections Computed Detections
91 Identity Measures Proposed Scores IDP: Precision Fraction of computed detections that are correctly identified. ID Recall F 1 -score False Negatives True Positives False Positives True Detections Computed Detections
92 Identity Measures Proposed Scores IDP: Precision Fraction of computed detections that are correctly identified. IDR: Recall Fraction of ground-truth detections that are correctly identified. F 1 -score False Negatives True Positives False Positives True Detections Computed Detections
93 Identity Measures Proposed Scores IDP: Precision Fraction of computed detections that are correctly identified. IDR: Recall Fraction of ground-truth detections that are correctly identified. FIDF1: 1 -score Ratio of correctly identified detections over the average number of ground-truth and computed detections False Negatives True Positives False Positives True Detections Computed Detections
94 Identity Measures Properties True and computed identities are mapped 1-1 Notion of identity switch is not present in ID measures The truth-to-result matching is the most favorable to the algorithm Applicable to single- and multi-camera tracking
95 Identity Measures Properties True and computed identities are mapped 1-1 Notion of identity switch is not present in ID measures The truth-to-result matching is the most favorable to the algorithm Applicable to single- and multi-camera tracking A b c
96 Identity Measures Properties True and computed identities are mapped 1-1 Notion of identity switch is not present in ID measures The truth-to-result matching is the most favorable to the algorithm Applicable to single- and multi-camera tracking A b A b c c
97 Identity Measures Properties True and computed identities are mapped 1-1 Notion of identity switch is not present in ID measures The truth-to-result matching is the most favorable to the algorithm Applicable to single- and multi-camera tracking A b c A b c Min Cost Matching
98 Identity Measures Properties True and computed identities are mapped 1-1 Notion of identity switch is not present in ID measures The truth-to-result matching is the most favorable to the algorithm Applicable to single- and multi-camera tracking T 1 C 1 C 3 C 2 T 2
99 Identity Measures Properties True and computed identities are mapped 1-1 Notion of identity switch is not present in ID measures The truth-to-result matching is the most favorable to the algorithm Applicable to single- and multi-camera tracking T 1 C 1 C 3 C 2 T 2




100 Scope and Limitations ID measures are useful in: Surveillance Sport MTT for autonomous driving Not necessary when: Tracking indistinguishable targets (ants, sheep) Not applicable to: Tracking targets that merge/split (cells)
101 Practical Implications MOT 16 Challenge Tracker MOTA HCC LMP FWT NLLMPa MDPNN NOMT_ JMC QuadMOT oicf_ MHT_DAM_ LINF1_ EAMTT_pub OVBT LTTSC-CRF LP2D_ TBD_ CEM_ DP_NMS_ GMPHD_HDA SMOT_ JPDA_m_
102 Practical Implications MOT 16 Challenge Tracker MOTA HCC LMP FWT NLLMPa MDPNN NOMT_ JMC QuadMOT oicf_ MHT_DAM_ LINF1_ EAMTT_pub OVBT LTTSC-CRF LP2D_ TBD_ CEM_ DP_NMS_ GMPHD_HDA SMOT_ JPDA_m_ Tracker IDF1 NOMT_ LMP HCC oicf_ NLLMPa JMC MDPNN MHT_DAM_ LINF1_ FWT EAMTT_pub LTTSC-CRF QuadMOT OVBT CEM_ LP2D_ GMPHD_HDA JPDA_m_ DP_NMS_ TBD_ SMOT_

103 Practical Implications MOT 16 Challenge Tracker MOTA HCC LMP FWT NLLMPa MDPNN NOMT_ JMC QuadMOT oicf_ MHT_DAM_ LINF1_ EAMTT_pub OVBT LTTSC-CRF LP2D_ TBD_ CEM_ DP_NMS_ GMPHD_HDA SMOT_ JPDA_m_ Tracker IDF1 NOMT_ LMP HCC oicf_ NLLMPa JMC MDPNN MHT_DAM_ LINF1_ FWT EAMTT_pub LTTSC-CRF QuadMOT OVBT CEM_ LP2D_ GMPHD_HDA JPDA_m_ DP_NMS_ TBD_ SMOT_ Rank Improvement


104 IDP/IDR Curves Public detections Private detections KDNT DeepSORT POI NOMTwSDP FWT LMP HCC NLLMPa JMC NOMT oicf CEM JPDA
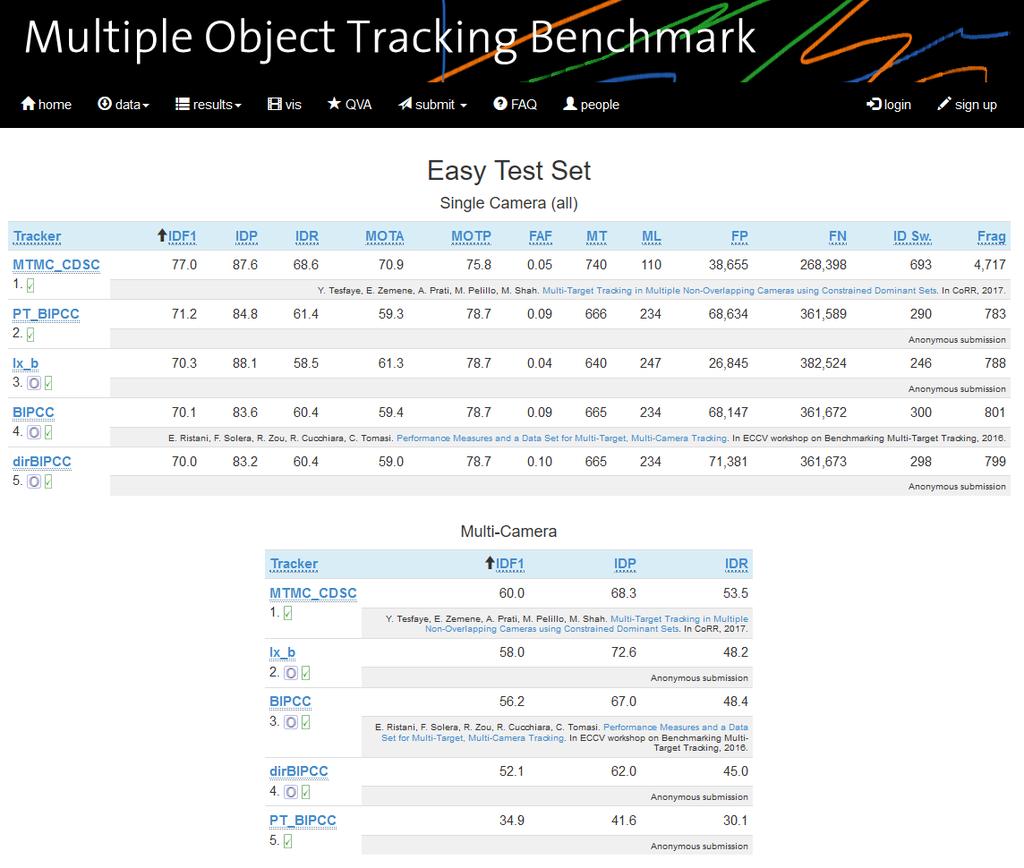
105 Performance Measures IDF1 IDP IDR PR-MOTA MOTA IDS MCTA FIO FIT STDA-D ATA MT ML FRG MTMC Tracker Performance Handover (X, FRG) TP OP [8] Performance Measures and a Data Set for Multi-Target, Multi-Camera Tracking. ECCV 2016 BMTT Workshop
106 Outline Problem Definition Performance Measures Existing Measures Issues Identity Measures DukeMTMCT Benchmark Summary















107 Previous MTMC Data Sets NLPR 1, 2 EPFL NLPR 3 APIDIS ISSIA PETS2009

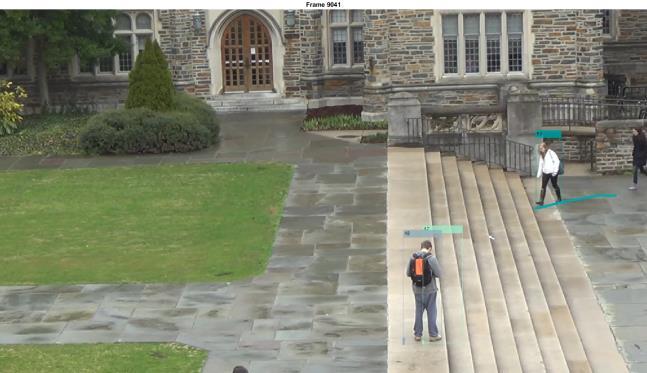
108 DukeMTMC 8 static cameras x 85 minutes of 1080p 60 fps video More than 2,000,000 manually annotated frames More than 2,000 identities Annotation by 5 people over 1 year More identities than all existing datasets combined Unconstrained paths, diverse appearance
109
110 Evaluation Single Camera Multi-Camera Ranking IDF1 score

111 Trainval 0-50 min Test-hard min Test-easy min
112 Baseline

113 Baseline: BIPCC Camera i Person detection Multi-Camera Identities MTMC Tracking as Correlation Clustering Tracking Multiple People Online and in Real Time, E. Ristani and C. Tomasi, ACCV 2014







114 Baseline

115 Baseline Incorrect Matches

116 Baseline Correct Matches
117 DukeMTMCT Fragmentations Merges IDR IDP

118 DukeMTMCT Fragmentations Merges IDR IDP ID switches in CLEAR MOT don t correlate with ID measures
119 Outline Problem Definition Performance Measures DukeMTMCT Benchmark Summary
120 Summary MTMC trackers are complex - multiple uncorrelated measures are required to understand tracker performance PR-MOTA STDA-D MOTA IDS IDF1 IDP IDR Interaction model Optimization Object detection Appearance model MTMC Tracker Performance MCTA FIO FIT TP ATA MT ML Parameter tuning FRG Motion model Training data Handover (X, FRG) OP

121 Summary Large-scale realistic benchmarks make comparisons meaningful
122 Summary Different applications require different measures ID measures show bottom line performance: They are useful for end users of MTMC tracking systems Tracker (a) Suspect 1 switch 67% identification Tracker (b) Suspect 7 switches 67% identification Tracker (c) Suspect 83% identification

123 Thank you! Code/Data: vision.cs.duke.edu/dukemtmc/ [1] Performance Measures and Dataset for Multi-Target, Multi-Camera Tracking Ergys Ristani, Francesco Solera, Roger Zou, Rita Cucchiara, Carlo Tomasi ECCV 2016 Workshop on Benchmarking Multi-Target Tracking [2] Tracking Social Groups Within and Across Cameras Francesco Solera, Simone Calderara, Ergys Ristani, Carlo Tomasi, Rita Cucchiara IEEE Transactions on Circuits and Systems 2016 [3] Tracking Multiple People Online and in Real Time Ergys Ristani and Carlo Tomasi ACCV 2014
Person Re-identification for Improved Multi-person Multi-camera Tracking by Continuous Entity Association
 Person Re-identification for Improved Multi-person Multi-camera Tracking by Continuous Entity Association Neeti Narayan, Nishant Sankaran, Devansh Arpit, Karthik Dantu, Srirangaraj Setlur, Venu Govindaraju
Person Re-identification for Improved Multi-person Multi-camera Tracking by Continuous Entity Association Neeti Narayan, Nishant Sankaran, Devansh Arpit, Karthik Dantu, Srirangaraj Setlur, Venu Govindaraju
Learning to Track: Online Multi- Object Tracking by Decision Making
 Learning to Track: Online Multi- Object Tracking by Decision Making Yu Xiang 1,2, Alexandre Alahi 1, and Silvio Savarese 1 1 Stanford University, 2 University of Michigan ICCV 2015 1 Multi-Object Tracking
Learning to Track: Online Multi- Object Tracking by Decision Making Yu Xiang 1,2, Alexandre Alahi 1, and Silvio Savarese 1 1 Stanford University, 2 University of Michigan ICCV 2015 1 Multi-Object Tracking
arxiv: v1 [cs.cv] 20 Sep 2017
![arxiv: v1 [cs.cv] 20 Sep 2017](/thumbs/76/73638624.jpg "arxiv: v1 [cs.cv] 20 Sep 2017") Multi-camera Multi-object Tracking Wenqian Liu Northeastern University liu.wenqi@husky.neu.edu Octavia Camps Northeastern University camps@coe.neu.edu Mario Sznaier Northeastern University msznaier@coe.neu.edu
Multi-camera Multi-object Tracking Wenqian Liu Northeastern University liu.wenqi@husky.neu.edu Octavia Camps Northeastern University camps@coe.neu.edu Mario Sznaier Northeastern University msznaier@coe.neu.edu
Pairwise Threshold for Gaussian Mixture Classification and its Application on Human Tracking Enhancement
 Pairwise Threshold for Gaussian Mixture Classification and its Application on Human Tracking Enhancement Daegeon Kim Sung Chun Lee Institute for Robotics and Intelligent Systems University of Southern
Pairwise Threshold for Gaussian Mixture Classification and its Application on Human Tracking Enhancement Daegeon Kim Sung Chun Lee Institute for Robotics and Intelligent Systems University of Southern
Performance Measures and a Data Set for Multi-Target, Multi-Camera Tracking
 Performance Measures and a Data Set for Multi-Target, Multi-Camera Tracking Ergys Ristani, Francesco Solera 2, Roger S. Zou, Rita Cucchiara 2, and Carlo Tomasi Computer Science Department, Duke University,
Performance Measures and a Data Set for Multi-Target, Multi-Camera Tracking Ergys Ristani, Francesco Solera 2, Roger S. Zou, Rita Cucchiara 2, and Carlo Tomasi Computer Science Department, Duke University,
Towards the evaluation of reproducible robustness in tracking-by-detection
 Towards the evaluation of reproducible robustness in tracking-by-detection Francesco Solera Simone Calderara Rita Cucchiara Department of Engineering Enzo Ferrari University of Modena and Reggio Emilia
Towards the evaluation of reproducible robustness in tracking-by-detection Francesco Solera Simone Calderara Rita Cucchiara Department of Engineering Enzo Ferrari University of Modena and Reggio Emilia
Track-clustering Error Evaluation for Track-based Multi-Camera Tracking System Employing Human Re-identification
 Track-clustering Error Evaluation for Track-based Multi-Camera Tracking System Employing Human Re-identification Chih-Wei Wu, Meng-Ting Zhong, Yu Tsao, Shao-Wen Yang 3, Yen-Kuang Chen 3, and Shao-Yi Chien
Track-clustering Error Evaluation for Track-based Multi-Camera Tracking System Employing Human Re-identification Chih-Wei Wu, Meng-Ting Zhong, Yu Tsao, Shao-Wen Yang 3, Yen-Kuang Chen 3, and Shao-Yi Chien
Automatic Parameter Adaptation for Multi-Object Tracking
 Automatic Parameter Adaptation for Multi-Object Tracking Duc Phu CHAU, Monique THONNAT, and François BREMOND {Duc-Phu.Chau, Monique.Thonnat, Francois.Bremond}@inria.fr STARS team, INRIA Sophia Antipolis,
Automatic Parameter Adaptation for Multi-Object Tracking Duc Phu CHAU, Monique THONNAT, and François BREMOND {Duc-Phu.Chau, Monique.Thonnat, Francois.Bremond}@inria.fr STARS team, INRIA Sophia Antipolis,
Online Tracking Parameter Adaptation based on Evaluation
 2013 10th IEEE International Conference on Advanced Video and Signal Based Surveillance Online Tracking Parameter Adaptation based on Evaluation Duc Phu Chau Julien Badie François Brémond Monique Thonnat
2013 10th IEEE International Conference on Advanced Video and Signal Based Surveillance Online Tracking Parameter Adaptation based on Evaluation Duc Phu Chau Julien Badie François Brémond Monique Thonnat
Non-Markovian Globally Consistent Multi-Object Tracking
 Non-Markovian Globally onsistent Multi-Object Tracking Supplementary Material Andrii Maksai 1, Xinchao Wang 2, François Fleuret 3, and Pascal Fua 1 1 omputer Vision Laboratory, EPFL, Lausanne, Switzerland,
Non-Markovian Globally onsistent Multi-Object Tracking Supplementary Material Andrii Maksai 1, Xinchao Wang 2, François Fleuret 3, and Pascal Fua 1 1 omputer Vision Laboratory, EPFL, Lausanne, Switzerland,
Trademark Matching and Retrieval in Sport Video Databases
 Trademark Matching and Retrieval in Sport Video Databases Andrew D. Bagdanov, Lamberto Ballan, Marco Bertini and Alberto Del Bimbo {bagdanov, ballan, bertini, delbimbo}@dsi.unifi.it 9th ACM SIGMM International
Trademark Matching and Retrieval in Sport Video Databases Andrew D. Bagdanov, Lamberto Ballan, Marco Bertini and Alberto Del Bimbo {bagdanov, ballan, bertini, delbimbo}@dsi.unifi.it 9th ACM SIGMM International
PETS2009 and Winter-PETS 2009 Results: A Combined Evaluation
 PETS2009 and Winter-PETS 2009 Results: A Combined Evaluation A.Ellis, A.Shahrokni and J.M.Ferryman Computational Vision Group School of Systems Engineering University of Reading Whiteknights, Reading,
PETS2009 and Winter-PETS 2009 Results: A Combined Evaluation A.Ellis, A.Shahrokni and J.M.Ferryman Computational Vision Group School of Systems Engineering University of Reading Whiteknights, Reading,
SIMPLE ONLINE AND REALTIME TRACKING. Queensland University of Technology, University of Sydney
 SIMPLE ONLINE AND REALTIME TRACKING Alex Bewley, Zongyuan Ge, Lionel Ott, Fabio Ramos, Ben Upcroft Queensland University of Technology, University of Sydney ABSTRACT This paper explores a pragmatic approach
SIMPLE ONLINE AND REALTIME TRACKING Alex Bewley, Zongyuan Ge, Lionel Ott, Fabio Ramos, Ben Upcroft Queensland University of Technology, University of Sydney ABSTRACT This paper explores a pragmatic approach
Rewind to Track: Parallelized Apprenticeship Learning with Backward Tracklets
 Rewind to Track: Parallelized Apprenticeship Learning with Backward Tracklets Jiang Liu 1,2, Jia Chen 2, De Cheng 2, Chenqiang Gao 1, Alexander G. Hauptmann 2 1 Chongqing University of Posts and Telecommunications
Rewind to Track: Parallelized Apprenticeship Learning with Backward Tracklets Jiang Liu 1,2, Jia Chen 2, De Cheng 2, Chenqiang Gao 1, Alexander G. Hauptmann 2 1 Chongqing University of Posts and Telecommunications
ETISEO, performance evaluation for video surveillance systems
 ETISEO, performance evaluation for video surveillance systems A. T. Nghiem, F. Bremond, M. Thonnat, V. Valentin Project Orion, INRIA - Sophia Antipolis France Abstract This paper presents the results of
ETISEO, performance evaluation for video surveillance systems A. T. Nghiem, F. Bremond, M. Thonnat, V. Valentin Project Orion, INRIA - Sophia Antipolis France Abstract This paper presents the results of
Robust Global Tracker based on an Online Estimation of Tracklet Descriptor Reliability
 Robust Global Tracker based on an Online Estimation of Tracklet Descriptor Reliability Nguyen Thi Lan Anh Chau Duc Phu Francois Bremond INRIA Sophia Antipolis 2004 Route des Lucioles -BP93 06902 Sophia
Robust Global Tracker based on an Online Estimation of Tracklet Descriptor Reliability Nguyen Thi Lan Anh Chau Duc Phu Francois Bremond INRIA Sophia Antipolis 2004 Route des Lucioles -BP93 06902 Sophia
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Multi-Object Tracking in Airborne Video Imagery based on Compressive Tracking Detection Responses Chen, Ting; Sahli, Hichem; Zhang, Yanning; Yang, Tao
 Vrije Universiteit Brussel Multi-Object Tracking in Airborne Video Imagery based on Compressive Tracking Detection Responses Chen, Ting; Sahli, Hichem; Zhang, Yanning; Yang, Tao Published in: International
Vrije Universiteit Brussel Multi-Object Tracking in Airborne Video Imagery based on Compressive Tracking Detection Responses Chen, Ting; Sahli, Hichem; Zhang, Yanning; Yang, Tao Published in: International
arxiv: v1 [cs.cv] 10 Apr 2017 Abstract
![arxiv: v1 [cs.cv] 10 Apr 2017 Abstract](/thumbs/92/108799522.jpg "arxiv: v1 [cs.cv] 10 Apr 2017 Abstract") Tracking the Trackers: An Analysis of the State of the Art in Multiple Object Tracking Laura Leal-Taixé 1, Anton Milan 2, Konrad Schindler 3 Daniel Cremers 1 Ian Reid 2 Stefan Roth 4 1 Technical University
Tracking the Trackers: An Analysis of the State of the Art in Multiple Object Tracking Laura Leal-Taixé 1, Anton Milan 2, Konrad Schindler 3 Daniel Cremers 1 Ian Reid 2 Stefan Roth 4 1 Technical University
ICDAR 2013 Robust Reading Competition
 ICDAR 2013 Robust Reading Competition D. Karatzas, F. Shafait, S. Uchida, M. Iwamura, L. Gomez, S. Robles, J. Mas, D. Fernandez, J. Almazán, L.P. de las Heras http://dag.cvc.uab.es/icdar2013competition/
ICDAR 2013 Robust Reading Competition D. Karatzas, F. Shafait, S. Uchida, M. Iwamura, L. Gomez, S. Robles, J. Mas, D. Fernandez, J. Almazán, L.P. de las Heras http://dag.cvc.uab.es/icdar2013competition/
MOTChallenge 2015: Towards a Benchmark for Multi-Target Tracking
 MOTChallenge 5: Towards a Benchmark for Multi-Target Tracking Laura Leal-Taixé, Anton Milan, Ian Reid, Stefan Roth, and Konrad Schindler arxiv:54.94v [cs.cv] 8 Apr 5 Abstract In the recent past, the computer
MOTChallenge 5: Towards a Benchmark for Multi-Target Tracking Laura Leal-Taixé, Anton Milan, Ian Reid, Stefan Roth, and Konrad Schindler arxiv:54.94v [cs.cv] 8 Apr 5 Abstract In the recent past, the computer
CCRMA MIR Workshop 2014 Evaluating Information Retrieval Systems. Leigh M. Smith Humtap Inc.
 CCRMA MIR Workshop 2014 Evaluating Information Retrieval Systems Leigh M. Smith Humtap Inc. leigh@humtap.com Basic system overview Segmentation (Frames, Onsets, Beats, Bars, Chord Changes, etc) Feature
CCRMA MIR Workshop 2014 Evaluating Information Retrieval Systems Leigh M. Smith Humtap Inc. leigh@humtap.com Basic system overview Segmentation (Frames, Onsets, Beats, Bars, Chord Changes, etc) Feature
QMUL-ACTIVA: Person Runs detection for the TRECVID Surveillance Event Detection task
 QMUL-ACTIVA: Person Runs detection for the TRECVID Surveillance Event Detection task Fahad Daniyal and Andrea Cavallaro Queen Mary University of London Mile End Road, London E1 4NS (United Kingdom) {fahad.daniyal,andrea.cavallaro}@eecs.qmul.ac.uk
QMUL-ACTIVA: Person Runs detection for the TRECVID Surveillance Event Detection task Fahad Daniyal and Andrea Cavallaro Queen Mary University of London Mile End Road, London E1 4NS (United Kingdom) {fahad.daniyal,andrea.cavallaro}@eecs.qmul.ac.uk
Features for Multi-Target Multi-Camera Tracking and Re-Identification
 Features for Multi-Target Multi-Camera Tracking and Re-Identification Ergys Ristani Carlo Tomasi Duke University Durham, NC, USA {ristani, tomasi}@cs.duke.edu Abstract Multi-Target Multi-Camera Tracking
Features for Multi-Target Multi-Camera Tracking and Re-Identification Ergys Ristani Carlo Tomasi Duke University Durham, NC, USA {ristani, tomasi}@cs.duke.edu Abstract Multi-Target Multi-Camera Tracking
Extracting Rankings for Spatial Keyword Queries from GPS Data
 Extracting Rankings for Spatial Keyword Queries from GPS Data Ilkcan Keles Christian S. Jensen Simonas Saltenis Aalborg University Outline Introduction Motivation Problem Definition Proposed Method Overview
Extracting Rankings for Spatial Keyword Queries from GPS Data Ilkcan Keles Christian S. Jensen Simonas Saltenis Aalborg University Outline Introduction Motivation Problem Definition Proposed Method Overview
MCMOT: Multi-Class Multi-Object Tracking using Changing Point Detection
 MCMOT: Multi-Class Multi-Object Tracking using Changing Point Detection ILSVRC 2016 Object Detection from Video Byungjae Lee¹, Songguo Jin¹, Enkhbayar Erdenee¹, Mi Young Nam², Young Gui Jung², Phill Kyu
MCMOT: Multi-Class Multi-Object Tracking using Changing Point Detection ILSVRC 2016 Object Detection from Video Byungjae Lee¹, Songguo Jin¹, Enkhbayar Erdenee¹, Mi Young Nam², Young Gui Jung², Phill Kyu
Multi-Target Tracking in Multiple Non-Overlapping Cameras using Constrained Dominant Sets
 Multi-Target Tracking in Multiple Non-Overlapping Cameras using Constrained Dominant Sets Yonatan Tariku Tesfaye*, Student Member, IEEE, Eyasu Zemene*, Student Member, IEEE, Andrea Prati, Senior member,
Multi-Target Tracking in Multiple Non-Overlapping Cameras using Constrained Dominant Sets Yonatan Tariku Tesfaye*, Student Member, IEEE, Eyasu Zemene*, Student Member, IEEE, Andrea Prati, Senior member,
Supplementary Material The Best of Both Worlds: Combining CNNs and Geometric Constraints for Hierarchical Motion Segmentation
 Supplementary Material The Best of Both Worlds: Combining CNNs and Geometric Constraints for Hierarchical Motion Segmentation Pia Bideau Aruni RoyChowdhury Rakesh R Menon Erik Learned-Miller University
Supplementary Material The Best of Both Worlds: Combining CNNs and Geometric Constraints for Hierarchical Motion Segmentation Pia Bideau Aruni RoyChowdhury Rakesh R Menon Erik Learned-Miller University
Multi-Object Tracking of Pedestrian Driven by Context
 Multi-Object Tracking of Pedestrian Driven by Context Nguyen Thi Lan Anh Francois Bremond INRIA Sophia Antipolis 2004 Route des Lucioles -BP93 Sophia Antipolis Cedex, 06902 - France {thi-lan-anh.nguyen
Multi-Object Tracking of Pedestrian Driven by Context Nguyen Thi Lan Anh Francois Bremond INRIA Sophia Antipolis 2004 Route des Lucioles -BP93 Sophia Antipolis Cedex, 06902 - France {thi-lan-anh.nguyen
A System for Real-time Detection and Tracking of Vehicles from a Single Car-mounted Camera
 A System for Real-time Detection and Tracking of Vehicles from a Single Car-mounted Camera Claudio Caraffi, Tomas Vojir, Jiri Trefny, Jan Sochman, Jiri Matas Toyota Motor Europe Center for Machine Perception,
A System for Real-time Detection and Tracking of Vehicles from a Single Car-mounted Camera Claudio Caraffi, Tomas Vojir, Jiri Trefny, Jan Sochman, Jiri Matas Toyota Motor Europe Center for Machine Perception,
Joint Vanishing Point Extraction and Tracking (Supplementary Material)
") Joint Vanishing Point Extraction and Tracking (Supplementary Material) Till Kroeger1 1 Dengxin Dai1 Luc Van Gool1,2 Computer Vision Laboratory, D-ITET, ETH Zurich 2 VISICS, ESAT/PSI, KU Leuven {kroegert,
Joint Vanishing Point Extraction and Tracking (Supplementary Material) Till Kroeger1 1 Dengxin Dai1 Luc Van Gool1,2 Computer Vision Laboratory, D-ITET, ETH Zurich 2 VISICS, ESAT/PSI, KU Leuven {kroegert,
Automatic Adaptation of a Generic Pedestrian Detector to a Specific Traffic Scene
 Automatic Adaptation of a Generic Pedestrian Detector to a Specific Traffic Scene Meng Wang and Xiaogang Wang {mwang,xgwang}@ee.cuhk.edu.hk Department of Electronic Engineering, The Chinese University
Automatic Adaptation of a Generic Pedestrian Detector to a Specific Traffic Scene Meng Wang and Xiaogang Wang {mwang,xgwang}@ee.cuhk.edu.hk Department of Electronic Engineering, The Chinese University
Tracking Multiple People Online and in Real Time
 Tracking Multiple People Online and in Real Time Ergys Ristani, Carlo Tomasi Duke University Abstract. We cast the problem of tracking several people as a graph partitioning problem that takes the form
Tracking Multiple People Online and in Real Time Ergys Ristani, Carlo Tomasi Duke University Abstract. We cast the problem of tracking several people as a graph partitioning problem that takes the form
Multi-Person Tracking-by-Detection based on Calibrated Multi-Camera Systems
 Multi-Person Tracking-by-Detection based on Calibrated Multi-Camera Systems Xiaoyan Jiang, Erik Rodner, and Joachim Denzler Computer Vision Group Jena Friedrich Schiller University of Jena {xiaoyan.jiang,erik.rodner,joachim.denzler}@uni-jena.de
Multi-Person Tracking-by-Detection based on Calibrated Multi-Camera Systems Xiaoyan Jiang, Erik Rodner, and Joachim Denzler Computer Vision Group Jena Friedrich Schiller University of Jena {xiaoyan.jiang,erik.rodner,joachim.denzler}@uni-jena.de
Class 3: Advanced Moving Object Detection and Alert Detection Feb. 18, 2008
 Class 3: Advanced Moving Object Detection and Alert Detection Feb. 18, 2008 Instructor: YingLi Tian Video Surveillance E6998-007 Senior/Feris/Tian 1 Outlines Moving Object Detection with Distraction Motions
Class 3: Advanced Moving Object Detection and Alert Detection Feb. 18, 2008 Instructor: YingLi Tian Video Surveillance E6998-007 Senior/Feris/Tian 1 Outlines Moving Object Detection with Distraction Motions
Symmetry Detection Competition
 Symmetry Detection Competition Evaluation Details PART II: Translation Symmetries Ingmar Rauschert 1 Translation Symmetry 2 Translation Symmetry Translation symmetries considered 1D: Frieze Pattern 2D:
Symmetry Detection Competition Evaluation Details PART II: Translation Symmetries Ingmar Rauschert 1 Translation Symmetry 2 Translation Symmetry Translation symmetries considered 1D: Frieze Pattern 2D:
Exploiting scene constraints to improve object detection algorithms for industrial applications
 Exploiting scene constraints to improve object detection algorithms for industrial applications PhD Public Defense Steven Puttemans Promotor: Toon Goedemé 2 A general introduction Object detection? Help
Exploiting scene constraints to improve object detection algorithms for industrial applications PhD Public Defense Steven Puttemans Promotor: Toon Goedemé 2 A general introduction Object detection? Help
Pattern recognition (4)
") Pattern recognition (4) 1 Things we have discussed until now Statistical pattern recognition Building simple classifiers Supervised classification Minimum distance classifier Bayesian classifier (1D and
Pattern recognition (4) 1 Things we have discussed until now Statistical pattern recognition Building simple classifiers Supervised classification Minimum distance classifier Bayesian classifier (1D and
1 Review of RJMCMC. α(o, o ) = min(1, π(o ) Q(o ; o ) ), (1)
 = min(1, π(o ) Q(o ; o ) ), (1)") Review of RJMCMC Starting with an initial state, RJMCMC proposes a new state o from a proposal distribution Q(o ; o) that depends on the current state o. The proposed state is probabilistically accepted
Review of RJMCMC Starting with an initial state, RJMCMC proposes a new state o from a proposal distribution Q(o ; o) that depends on the current state o. The proposed state is probabilistically accepted
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
WP1: Video Data Analysis
 Leading : UNICT Participant: UEDIN Fish4Knowledge Final Review Meeting - November 29, 2013 - Luxembourg Workpackage 1 Objectives Fish Detection: Background/foreground modeling algorithms able to deal with
Leading : UNICT Participant: UEDIN Fish4Knowledge Final Review Meeting - November 29, 2013 - Luxembourg Workpackage 1 Objectives Fish Detection: Background/foreground modeling algorithms able to deal with
Multi-person Tracking by Multicut and Deep Matching
 Multi-person Tracking by Multicut and Deep Matching Siyu Tang (B), Bjoern Andres, Mykhaylo Andriluka, and Bernt Schiele Max Planck Institute for Informatics, Saarbrücken Informatics Campus, Saarbrücken,
Multi-person Tracking by Multicut and Deep Matching Siyu Tang (B), Bjoern Andres, Mykhaylo Andriluka, and Bernt Schiele Max Planck Institute for Informatics, Saarbrücken Informatics Campus, Saarbrücken,
Tracking The Untrackable: Learning to Track Multiple Cues with Long-Term Dependencies
 Tracking The Untrackable: Learning to Track Multiple Cues with Long-Term Dependencies Amir Sadeghian 1, Alexandre Alahi 2, Silvio Savarese 1 1 Stanford University 2 Ecole Polytechnique Federale de Lausanne
Tracking The Untrackable: Learning to Track Multiple Cues with Long-Term Dependencies Amir Sadeghian 1, Alexandre Alahi 2, Silvio Savarese 1 1 Stanford University 2 Ecole Polytechnique Federale de Lausanne
Multimedia Information Retrieval
 Multimedia Information Retrieval Prof Stefan Rüger Multimedia and Information Systems Knowledge Media Institute The Open University http://kmi.open.ac.uk/mmis Multimedia Information Retrieval 1. What are
Multimedia Information Retrieval Prof Stefan Rüger Multimedia and Information Systems Knowledge Media Institute The Open University http://kmi.open.ac.uk/mmis Multimedia Information Retrieval 1. What are
Real-Time* Multiple Object Tracking (MOT) for Autonomous Navigation
 for Autonomous Navigation") Real-Time* Multiple Object Tracking (MOT) for Autonomous Navigation Ankush Agarwal,1 Saurabh Suryavanshi,2 ankushag@stanford.edu saurabhv@stanford.edu Authors contributed equally for this project. 1 Google
Real-Time* Multiple Object Tracking (MOT) for Autonomous Navigation Ankush Agarwal,1 Saurabh Suryavanshi,2 ankushag@stanford.edu saurabhv@stanford.edu Authors contributed equally for this project. 1 Google
Robust and accurate change detection under sudden illumination variations
 Robust and accurate change detection under sudden illumination variations Luigi Di Stefano Federico Tombari Stefano Mattoccia Errico De Lisi Department of Electronics Computer Science and Systems (DEIS)
Robust and accurate change detection under sudden illumination variations Luigi Di Stefano Federico Tombari Stefano Mattoccia Errico De Lisi Department of Electronics Computer Science and Systems (DEIS)
Clustering will not be satisfactory if:
 Clustering will not be satisfactory if: -- in the input space the clusters are not linearly separable; -- the distance measure is not adequate; -- the assumptions limit the shape or the number of the clusters.
Clustering will not be satisfactory if: -- in the input space the clusters are not linearly separable; -- the distance measure is not adequate; -- the assumptions limit the shape or the number of the clusters.
Multi-Perspective Vehicle Detection and Tracking: Challenges, Dataset, and Metrics
 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC) Windsor Oceanico Hotel, Rio de Janeiro, Brazil, November 1-, Multi-Perspective Vehicle Detection and Tracking: Challenges,
IEEE 19th International Conference on Intelligent Transportation Systems (ITSC) Windsor Oceanico Hotel, Rio de Janeiro, Brazil, November 1-, Multi-Perspective Vehicle Detection and Tracking: Challenges,
BOP: Benchmark for 6D Object Pose Estimation
 BOP: Benchmark for 6D Object Pose Estimation Hodan, Michel, Brachmann, Kehl, Buch, Kraft, Drost, Vidal, Ihrke, Zabulis, Sahin, Manhardt, Tombari, Kim, Matas, Rother 4th International Workshop on Recovering
BOP: Benchmark for 6D Object Pose Estimation Hodan, Michel, Brachmann, Kehl, Buch, Kraft, Drost, Vidal, Ihrke, Zabulis, Sahin, Manhardt, Tombari, Kim, Matas, Rother 4th International Workshop on Recovering
The Unmanned Aerial Vehicle Benchmark: Object Detection and Tracking
 The Unmanned Aerial Vehicle Benchmark: Object Detection and Tracking Dawei Du 1[0000 0001 9404 524X], Yuankai Qi 2[0000 0003 4312 5682], Hongyang Yu 2[0000 0003 0036 531X], Yifan Yang 1[0000 0003 1455
The Unmanned Aerial Vehicle Benchmark: Object Detection and Tracking Dawei Du 1[0000 0001 9404 524X], Yuankai Qi 2[0000 0003 4312 5682], Hongyang Yu 2[0000 0003 0036 531X], Yifan Yang 1[0000 0003 1455
Customized Multi-Person Tracker
 Customized Multi-Person Tracker Liqian Ma 1 Siyu Tang 2,3 Michael J. Black 2 Luc Van Gool 1,4 1 KU-Leuven/PSI, TRACE (Toyota Res in Europe) {liqian.ma, luc.vangool}@esat.kuleuven.be 2 Max Planck Institute
Customized Multi-Person Tracker Liqian Ma 1 Siyu Tang 2,3 Michael J. Black 2 Luc Van Gool 1,4 1 KU-Leuven/PSI, TRACE (Toyota Res in Europe) {liqian.ma, luc.vangool}@esat.kuleuven.be 2 Max Planck Institute
Definition, Detection, and Evaluation of Meeting Events in Airport Surveillance Videos
 Definition, Detection, and Evaluation of Meeting Events in Airport Surveillance Videos Sung Chun Lee, Chang Huang, and Ram Nevatia University of Southern California, Los Angeles, CA 90089, USA sungchun@usc.edu,
Definition, Detection, and Evaluation of Meeting Events in Airport Surveillance Videos Sung Chun Lee, Chang Huang, and Ram Nevatia University of Southern California, Los Angeles, CA 90089, USA sungchun@usc.edu,
Chapter 9 Object Tracking an Overview
 Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Event-Based Tracking Evaluation Metric
 Event-Based Tracking Evaluation Metric D. Roth 1, E. Koller-Meier 1, D. Rowe 2, T.B. Moeslund 3, L. Van Gool 1 1 Computer Vision Laboratory, ETH Zurich, Switzerland {droth,ebmeier,vangool}@vision.ee.ethz.ch
Event-Based Tracking Evaluation Metric D. Roth 1, E. Koller-Meier 1, D. Rowe 2, T.B. Moeslund 3, L. Van Gool 1 1 Computer Vision Laboratory, ETH Zurich, Switzerland {droth,ebmeier,vangool}@vision.ee.ethz.ch
Improving Multiple Object Tracking with Optical Flow and Edge Preprocessing
 Improving Multiple Object Tracking with Optical Flow and Edge Preprocessing David-Alexandre Beaupré, Guillaume-Alexandre Bilodeau LITIV lab., Dept. of Computer & Software Eng. Polytechnique Montréal Montréal,
Improving Multiple Object Tracking with Optical Flow and Edge Preprocessing David-Alexandre Beaupré, Guillaume-Alexandre Bilodeau LITIV lab., Dept. of Computer & Software Eng. Polytechnique Montréal Montréal,
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach
 Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Visual Tracking: an Experimental Survey
 *****For Peer Review Only***** Visual Tracking: an Experimental Survey Journal: Transactions on Pattern Analysis and Machine Intelligence Manuscript ID: TPAMI---.R Manuscript Type: Survey Keywords: Object
*****For Peer Review Only***** Visual Tracking: an Experimental Survey Journal: Transactions on Pattern Analysis and Machine Intelligence Manuscript ID: TPAMI---.R Manuscript Type: Survey Keywords: Object
Re-identification for Online Person Tracking by Modeling Space-Time Continuum
 Re-identification for Online Person Tracking by Modeling Space-Time Continuum Neeti Narayan, Nishant Sankaran, Srirangaraj Setlur and Venu Govindaraju University at Buffalo, SUNY {neetinar, n6, setlur,
Re-identification for Online Person Tracking by Modeling Space-Time Continuum Neeti Narayan, Nishant Sankaran, Srirangaraj Setlur and Venu Govindaraju University at Buffalo, SUNY {neetinar, n6, setlur,
arxiv: v2 [cs.cv] 14 Aug 2017
![arxiv: v2 [cs.cv] 14 Aug 2017](/thumbs/76/73881767.jpg "arxiv: v2 [cs.cv] 14 Aug 2017") Online Multi-Object Tracking Using CNN-based Single Object Tracker with Spatial-Temporal Attention Mechanism Qi Chu 1,3, Wanli Ouyang 2,3, Hongsheng Li 3, Xiaogang Wang 3, Bin Liu 1, Nenghai Yu 1, 1 University
Online Multi-Object Tracking Using CNN-based Single Object Tracker with Spatial-Temporal Attention Mechanism Qi Chu 1,3, Wanli Ouyang 2,3, Hongsheng Li 3, Xiaogang Wang 3, Bin Liu 1, Nenghai Yu 1, 1 University
Evaluation of Probabilistic Occupancy Map for Player Tracking in Team Sports
 POSTER 2014, PRAGUE MAY 15 1 Evaluation of Probabilistic Occupancy Map for Player Tracking in Team Sports Matej ŠMÍD, Jan POKORNÝ Dept. of Cybernetics, Czech Technical University, Technická 2, 166 27 Praha,
POSTER 2014, PRAGUE MAY 15 1 Evaluation of Probabilistic Occupancy Map for Player Tracking in Team Sports Matej ŠMÍD, Jan POKORNÝ Dept. of Cybernetics, Czech Technical University, Technická 2, 166 27 Praha,
MULTI-OBJECT tracking in real scenes is an important. Joint Learning of Siamese CNNs and Temporally Constrained Metrics for Tracklet Association
 1 Joint Learning of Siamese CNNs and Temporally Constrained Metrics for Tracklet Association Bing Wang, Student Member, IEEE, Li Wang, Member, IEEE, Bing Shuai, Student Member, IEEE, Zhen Zuo, Student
1 Joint Learning of Siamese CNNs and Temporally Constrained Metrics for Tracklet Association Bing Wang, Student Member, IEEE, Li Wang, Member, IEEE, Bing Shuai, Student Member, IEEE, Zhen Zuo, Student
Joint Vanishing Point Extraction and Tracking. 9. June 2015 CVPR 2015 Till Kroeger, Dengxin Dai, Luc Van Gool, Computer Vision ETH Zürich
 Joint Vanishing Point Extraction and Tracking 9. June 2015 CVPR 2015 Till Kroeger, Dengxin Dai, Luc Van Gool, Computer Vision Lab @ ETH Zürich Definition: Vanishing Point = Intersection of 2D line segments,
Joint Vanishing Point Extraction and Tracking 9. June 2015 CVPR 2015 Till Kroeger, Dengxin Dai, Luc Van Gool, Computer Vision Lab @ ETH Zürich Definition: Vanishing Point = Intersection of 2D line segments,
Crowd Event Recognition Using HOG Tracker
 Crowd Event Recognition Using HOG Tracker Carolina Gárate Piotr Bilinski Francois Bremond Pulsar Pulsar Pulsar INRIA INRIA INRIA Sophia Antipolis, France Sophia Antipolis, France Sophia Antipolis, France
Crowd Event Recognition Using HOG Tracker Carolina Gárate Piotr Bilinski Francois Bremond Pulsar Pulsar Pulsar INRIA INRIA INRIA Sophia Antipolis, France Sophia Antipolis, France Sophia Antipolis, France
Fundamental Matrices from Moving Objects Using Line Motion Barcodes
 Fundamental Matrices from Moving Objects Using Line Motion Barcodes Yoni Kasten (B), Gil Ben-Artzi, Shmuel Peleg, and Michael Werman School of Computer Science and Engineering, The Hebrew University of
Fundamental Matrices from Moving Objects Using Line Motion Barcodes Yoni Kasten (B), Gil Ben-Artzi, Shmuel Peleg, and Michael Werman School of Computer Science and Engineering, The Hebrew University of
Online Multi-Object Tracking with Dual Matching Attention Networks
 Online Multi-Object Tracking with Dual Matching Attention Networks Ji Zhu 1,2, Hua Yang 1, Nian Liu 3, Minyoung Kim 4, Wenjun Zhang 1, and Ming-Hsuan Yang 5,6 1 Shanghai Jiao Tong University 2 Visbody
Online Multi-Object Tracking with Dual Matching Attention Networks Ji Zhu 1,2, Hua Yang 1, Nian Liu 3, Minyoung Kim 4, Wenjun Zhang 1, and Ming-Hsuan Yang 5,6 1 Shanghai Jiao Tong University 2 Visbody
Performance Evaluation
 Chapter 4 Performance Evaluation For testing and comparing the effectiveness of retrieval and classification methods, ways of evaluating the performance are required. This chapter discusses several of
Chapter 4 Performance Evaluation For testing and comparing the effectiveness of retrieval and classification methods, ways of evaluating the performance are required. This chapter discusses several of
Tracking Groups in Mobile Network Traces
 Tracking Groups in Mobile Network Traces Kun Tu*, Bruno Ribeiro**, Ananthram Swami***, Don Towsley* *University of Massachusetts, Amherst **Purdue University ***Army Research Lab Presented by Gayane Vardoyan
Tracking Groups in Mobile Network Traces Kun Tu*, Bruno Ribeiro**, Ananthram Swami***, Don Towsley* *University of Massachusetts, Amherst **Purdue University ***Army Research Lab Presented by Gayane Vardoyan
Egocentric Meets Top-view
 1 Egocentric Meets Top-view arxiv:1608.08334v2 [cs.cv] 14 Sep 2016 Shervin Ardeshir, and Ali Borji, Member, IEEE, Abstract Thanks to the availability and increasing popularity of wearable devices such
1 Egocentric Meets Top-view arxiv:1608.08334v2 [cs.cv] 14 Sep 2016 Shervin Ardeshir, and Ali Borji, Member, IEEE, Abstract Thanks to the availability and increasing popularity of wearable devices such
Online Object Tracking with Proposal Selection. Yang Hua Karteek Alahari Cordelia Schmid Inria Grenoble Rhône-Alpes, France
 Online Object Tracking with Proposal Selection Yang Hua Karteek Alahari Cordelia Schmid Inria Grenoble Rhône-Alpes, France Outline 2 Background Our approach Experimental results Summary Background 3 Tracking-by-detection
Online Object Tracking with Proposal Selection Yang Hua Karteek Alahari Cordelia Schmid Inria Grenoble Rhône-Alpes, France Outline 2 Background Our approach Experimental results Summary Background 3 Tracking-by-detection
Performance Evaluation Metrics and Statistics for Positional Tracker Evaluation
 Performance Evaluation Metrics and Statistics for Positional Tracker Evaluation Chris J. Needham and Roger D. Boyle School of Computing, The University of Leeds, Leeds, LS2 9JT, UK {chrisn,roger}@comp.leeds.ac.uk
Performance Evaluation Metrics and Statistics for Positional Tracker Evaluation Chris J. Needham and Roger D. Boyle School of Computing, The University of Leeds, Leeds, LS2 9JT, UK {chrisn,roger}@comp.leeds.ac.uk
Online Motion Agreement Tracking
 WU,ZHANG,BETKE: ONLINE MOTION AGREEMENT TRACKING 1 Online Motion Agreement Tracking Zheng Wu wuzheng@bu.edu Jianming Zhang jmzhang@bu.edu Margrit Betke betke@bu.edu Computer Science Department Boston University
WU,ZHANG,BETKE: ONLINE MOTION AGREEMENT TRACKING 1 Online Motion Agreement Tracking Zheng Wu wuzheng@bu.edu Jianming Zhang jmzhang@bu.edu Margrit Betke betke@bu.edu Computer Science Department Boston University
arxiv: v1 [cs.cv] 25 Jan 2019
![arxiv: v1 [cs.cv] 25 Jan 2019](/thumbs/95/126104124.jpg "arxiv: v1 [cs.cv] 25 Jan 2019") Multiple Hypothesis Tracking Algorithm for Multi-Target Multi-Camera Tracking with Disoint Views Multiple Hypothesis Tracking Algorithm for Multi-Target Multi-Camera Tracking with Disoint Views Kwangin
Multiple Hypothesis Tracking Algorithm for Multi-Target Multi-Camera Tracking with Disoint Views Multiple Hypothesis Tracking Algorithm for Multi-Target Multi-Camera Tracking with Disoint Views Kwangin
arxiv: v1 [cs.cv] 15 May 2016
![arxiv: v1 [cs.cv] 15 May 2016](/thumbs/86/93309893.jpg "arxiv: v1 [cs.cv] 15 May 2016") Joint Learning of Convolutional Neural Networks and Temporally Constrained Metrics for Tracklet Association Based on Large-Scale Datasets arxiv:1605.04502v1 [cs.cv] 15 May 2016 Bing Wang, Kap Luk Chan,
Joint Learning of Convolutional Neural Networks and Temporally Constrained Metrics for Tracklet Association Based on Large-Scale Datasets arxiv:1605.04502v1 [cs.cv] 15 May 2016 Bing Wang, Kap Luk Chan,
Evaluation Measures. Sebastian Pölsterl. April 28, Computer Aided Medical Procedures Technische Universität München
 Evaluation Measures Sebastian Pölsterl Computer Aided Medical Procedures Technische Universität München April 28, 2015 Outline 1 Classification 1. Confusion Matrix 2. Receiver operating characteristics
Evaluation Measures Sebastian Pölsterl Computer Aided Medical Procedures Technische Universität München April 28, 2015 Outline 1 Classification 1. Confusion Matrix 2. Receiver operating characteristics
Total Recall: Automatic Query Expansion with a Generative Feature Model for Object Retrieval O. Chum, et al.
 Total Recall: Automatic Query Expansion with a Generative Feature Model for Object Retrieval O. Chum, et al. Presented by Brandon Smith Computer Vision Fall 2007 Objective Given a query image of an object,
Total Recall: Automatic Query Expansion with a Generative Feature Model for Object Retrieval O. Chum, et al. Presented by Brandon Smith Computer Vision Fall 2007 Objective Given a query image of an object,
Visual Object Tracking. Jianan Wu Megvii (Face++) Researcher Dec 2017
 Researcher Dec 2017") Visual Object Tracking Jianan Wu Megvii (Face++) Researcher wjn@megvii.com Dec 2017 Applications From image to video: Augmented Reality Motion Capture Surveillance Sports Analysis Wait. What is visual
Visual Object Tracking Jianan Wu Megvii (Face++) Researcher wjn@megvii.com Dec 2017 Applications From image to video: Augmented Reality Motion Capture Surveillance Sports Analysis Wait. What is visual
arxiv: v1 [cs.cv] 19 Oct 2016
![arxiv: v1 [cs.cv] 19 Oct 2016](/thumbs/76/73604965.jpg "arxiv: v1 [cs.cv] 19 Oct 2016") arxiv:1610.06136v1 [cs.cv] 19 Oct 2016 POI: Multiple Object Tracking with High Performance Detection and Appearance Feature Fengwei Yu 1,3 Wenbo Li 2,3 Quanquan Li 3 Yu Liu 3 Xiaohua Shi 1 Junjie Yan 3
arxiv:1610.06136v1 [cs.cv] 19 Oct 2016 POI: Multiple Object Tracking with High Performance Detection and Appearance Feature Fengwei Yu 1,3 Wenbo Li 2,3 Quanquan Li 3 Yu Liu 3 Xiaohua Shi 1 Junjie Yan 3
arxiv: v2 [cs.cv] 3 Apr 2017
![arxiv: v2 [cs.cv] 3 Apr 2017](/thumbs/79/79000801.jpg "arxiv: v2 [cs.cv] 3 Apr 2017") Tracking The Untrackable: Learning to Track Multiple Cues with Long-Term Dependencies mir Sadeghian, lexandre lahi, Silvio Savarese Stanford University {amirabs,alahi,ssilvio}@cs.stanford.edu arxiv:1701.01909v2
Tracking The Untrackable: Learning to Track Multiple Cues with Long-Term Dependencies mir Sadeghian, lexandre lahi, Silvio Savarese Stanford University {amirabs,alahi,ssilvio}@cs.stanford.edu arxiv:1701.01909v2
Learning an image-based motion context for multiple people tracking
 Learning an image-based motion context for multiple people tracking Laura Leal-Taix e1,2, Michele Fenzi2, Alina Kuznetsova2, Bodo Rosenhahn2, and Silvio Savarese3 1 2 Photogrammetry and Remote Sensing,
Learning an image-based motion context for multiple people tracking Laura Leal-Taix e1,2, Michele Fenzi2, Alina Kuznetsova2, Bodo Rosenhahn2, and Silvio Savarese3 1 2 Photogrammetry and Remote Sensing,
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Automated Video Analysis of Crowd Behavior
 Automated Video Analysis of Crowd Behavior Robert Collins CSE Department Mar 30, 2009 Computational Science Seminar Series, Spring 2009. We Are... Lab for Perception, Action and Cognition Research Interest:
Automated Video Analysis of Crowd Behavior Robert Collins CSE Department Mar 30, 2009 Computational Science Seminar Series, Spring 2009. We Are... Lab for Perception, Action and Cognition Research Interest:
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Automatic summarization of video data
 Automatic summarization of video data Presented by Danila Potapov Joint work with: Matthijs Douze Zaid Harchaoui Cordelia Schmid LEAR team, nria Grenoble Khronos-Persyvact Spring School 1.04.2015 Definition
Automatic summarization of video data Presented by Danila Potapov Joint work with: Matthijs Douze Zaid Harchaoui Cordelia Schmid LEAR team, nria Grenoble Khronos-Persyvact Spring School 1.04.2015 Definition
A data set for evaluating the performance of multi-class multi-object video tracking
 A data set for evaluating the performance of multi-class multi-object video tracking Avishek Chakraborty a, Victor Stamatescu a, Sebastien C. Wong b, Grant Wigley a, David Kearney a a Computational Learning
A data set for evaluating the performance of multi-class multi-object video tracking Avishek Chakraborty a, Victor Stamatescu a, Sebastien C. Wong b, Grant Wigley a, David Kearney a a Computational Learning
3D reconstruction how accurate can it be?
 Performance Metrics for Correspondence Problems 3D reconstruction how accurate can it be? Pierre Moulon, Foxel CVPR 2015 Workshop Boston, USA (June 11, 2015) We can capture large environments. But for
Performance Metrics for Correspondence Problems 3D reconstruction how accurate can it be? Pierre Moulon, Foxel CVPR 2015 Workshop Boston, USA (June 11, 2015) We can capture large environments. But for
iqmulus/terramobilita benchmark on Urban Analysis
 iqmulus/terramobilita benchmark on Urban Analysis Bruno Vallet, Mathieu Brédif, Béatriz Marcotegui, Andres Serna, Nicolas Paparoditis 1 / 50 Introduction 2 / 50 Introduction Mobile laser scanning (MLS)
iqmulus/terramobilita benchmark on Urban Analysis Bruno Vallet, Mathieu Brédif, Béatriz Marcotegui, Andres Serna, Nicolas Paparoditis 1 / 50 Introduction 2 / 50 Introduction Mobile laser scanning (MLS)
Sports Field Localization
 Sports Field Localization Namdar Homayounfar February 5, 2017 1 / 1 Motivation Sports Field Localization: Have to figure out where the field and players are in 3d space in order to make measurements and
Sports Field Localization Namdar Homayounfar February 5, 2017 1 / 1 Motivation Sports Field Localization: Have to figure out where the field and players are in 3d space in order to make measurements and
MOANA: An Online Learned Adaptive Appearance Model for Robust Multiple Object Tracking in 3D
 MOANA: An Online Learned Adaptive Appearance Model for Robust Multiple Object Tracking in 3D Zheng Tang 1, Student Member, and Jenq-Neng Hwang 1, Fellow, IEEE 1 Department of Electrical and Computer Engineering,
MOANA: An Online Learned Adaptive Appearance Model for Robust Multiple Object Tracking in 3D Zheng Tang 1, Student Member, and Jenq-Neng Hwang 1, Fellow, IEEE 1 Department of Electrical and Computer Engineering,
Project 3 Q&A. Jonathan Krause
 Project 3 Q&A Jonathan Krause 1 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations 2 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations
Project 3 Q&A Jonathan Krause 1 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations 2 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations
Robust False Positive Detection for Real-Time Multi-Target Tracking
 Robust False Positive Detection for Real-Time Multi-Target Tracking Henrik Brauer, Christos Grecos, and Kai von Luck University of the West of Scotland University of Applied Sciences Hamburg Henrik.Brauer@HAW-Hamburg.de
Robust False Positive Detection for Real-Time Multi-Target Tracking Henrik Brauer, Christos Grecos, and Kai von Luck University of the West of Scotland University of Applied Sciences Hamburg Henrik.Brauer@HAW-Hamburg.de
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Using temporal seeding to constrain the disparity search range in stereo matching
 Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
IN this paper, we address the problem of tracking multiple
 ACCEPTED TO IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, SEPTEMBER 2013 1 Multi-Commodity Network Flow for Tracking Multiple People Horesh Ben Shitrit, Jérôme Berclaz, François Fleuret,
ACCEPTED TO IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, SEPTEMBER 2013 1 Multi-Commodity Network Flow for Tracking Multiple People Horesh Ben Shitrit, Jérôme Berclaz, François Fleuret,
Outline of this Talk
 Outline of this Talk Data Association associate common detections across frames matching up who is who Two frames: linear assignment problem Generalize to three or more frames increasing solution quality
Outline of this Talk Data Association associate common detections across frames matching up who is who Two frames: linear assignment problem Generalize to three or more frames increasing solution quality
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Multiple-Person Tracking by Detection
 http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
arxiv: v1 [cs.cv] 8 Jan 2017
![arxiv: v1 [cs.cv] 8 Jan 2017](/thumbs/74/70523948.jpg "arxiv: v1 [cs.cv] 8 Jan 2017") Tracking The Untrackable: Learning To Track Multiple Cues with Long-Term Dependencies Amir Sadeghian, Alexandre Alahi, Silvio Savarese Stanford University {amirabs,alahi,ssilvio}@cs.stanford.edu arxiv:1701.01909v1
Tracking The Untrackable: Learning To Track Multiple Cues with Long-Term Dependencies Amir Sadeghian, Alexandre Alahi, Silvio Savarese Stanford University {amirabs,alahi,ssilvio}@cs.stanford.edu arxiv:1701.01909v1
Effective Vehicle Tracking Algorithm for Smart Traffic Networks
 Effective Vehicle Tracking Algorithm for Smart Traffic Networks Shuai Hua Computer Engineering San José State University San José, CA, USA shuai.hua@sjsu.edu David C. Anastasiu Computer Engineering San
Effective Vehicle Tracking Algorithm for Smart Traffic Networks Shuai Hua Computer Engineering San José State University San José, CA, USA shuai.hua@sjsu.edu David C. Anastasiu Computer Engineering San
Internet of things that video
 Video recognition from a sentence Cees Snoek Intelligent Sensory Information Systems Lab University of Amsterdam The Netherlands Internet of things that video 45 billion cameras by 2022 [LDV Capital] 2
Video recognition from a sentence Cees Snoek Intelligent Sensory Information Systems Lab University of Amsterdam The Netherlands Internet of things that video 45 billion cameras by 2022 [LDV Capital] 2
Learning the Three Factors of a Non-overlapping Multi-camera Network Topology
 Learning the Three Factors of a Non-overlapping Multi-camera Network Topology Xiaotang Chen, Kaiqi Huang, and Tieniu Tan National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy
Learning the Three Factors of a Non-overlapping Multi-camera Network Topology Xiaotang Chen, Kaiqi Huang, and Tieniu Tan National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy