Sports Field Localization
|
|
|
- Maurice Atkinson
- 5 years ago
- Views:
Transcription
1 Sports Field Localization Namdar Homayounfar February 5, / 1

2 Motivation Sports Field Localization: Have to figure out where the field and players are in 3d space in order to make measurements and generate statistics. 2 / 1

3 Motivation a.espncdn.com 3 / 1

4 How is this done in practice? There are various tracking and analytics companies Their solutions for field localization is based mostly on hardware 4 / 1

5 How is this done in practice? 5 / 1
6 How is this done in practice? 6 / 1

7 How is this done in practice? 7 / 1

8 How is this done in practice? There are various tracking and analytics companies Their solutions for field localization is based mostly on hardware 8 / 1

9 How is this done in practice? There are various tracking and analytics companies Their solutions for field localization is based mostly on hardware 9 / 1
10 Drawbacks Very expensive: e.g. Sportvue costs > $ per season for a team Only rich teams can afford them Have to maintain all the hardware Still not bulletproof. Require workers to fix mistakes 10 / 1

11 Simpler Solution? Can we get rid of all these cameras/gps systems and just figure out where the players are by looking at a broadcast image of the field? 11 / 1
12 Simpler Solution? YES! Goal: Given a single broadcast image of a sport game, such as soccer, can we localize it? H is a 3 3 invertible matrix with 8 d.f. Called a projective transformation/homography 12 / 1
13 Homography Matrix The matrix H captures all the following transformations: Multiple View Geometry by Hartley and Zisserman 13 / 1

14 How to find H? Require 4 point correspondences Difficulty arises in finding the 4 corresponding points 14 / 1
15 Related Work: Academia Hess et al., Improved Video Registration using Non-Distinctive Local Image Features, 2007 Gupta et al. Using Line and Ellipse Features for Rectification of Broadcast Hockey Video, 2011 Gupta et al / 1

16 Related Work: Academia Based on Keyframes and old school computer vision transforms (eg. SIFT) Gupta et al Limitation: Depends on fixed features and also requires manual annotation of keyframes for each game and 16 / 1

17 Can we do better? Can we automatically localize the field from a broadcast image? Lets come up with a learning approach Based on joint work with Sanja Fidler and Raquel Urtasun submitted to CVPR 17 / 1


18 In case of Soccer Large dimensions and exposed to the elements Different grass textures and patterns 18 / 1
19 This Work Introduce a parametrization of the field Incorporate prior knowledge about the soccer field as potentials in an CRF Find the mapping H implicitly by doing inference in the CRF Single Camera, No key-frame, Fast Inference 19 / 1
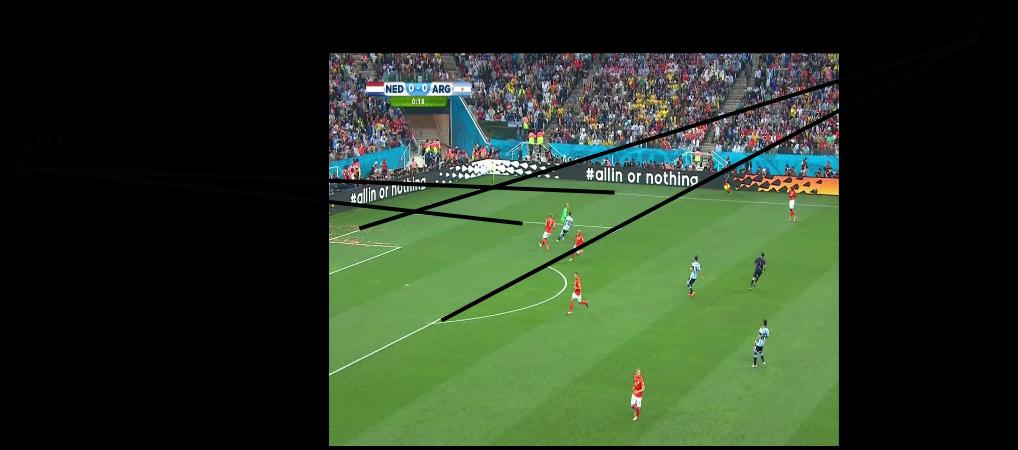
20 Methodology Let x X be random variable corresponding to a broadcast image of a soccer field. A soccer field is restricted by two long sides referred to as touchlines and two shorter sides referred to as goallines We aim to infer the position of the touchlines and the goallines in the image x. (Not all visible at the same time) 20 / 1

21 Methodology 21 / 1
22 Methodology: Parametrization It s very important how we parametrize this problem What are we trying to find? Vanishing Points: Where parallel lines meet in the image Manhattan World Assumption: Existence of three dominant orthogonal vanishing points in human-made scenes. In a soccer field we usually have clues for the two orthogonal vanishing point 22 / 1
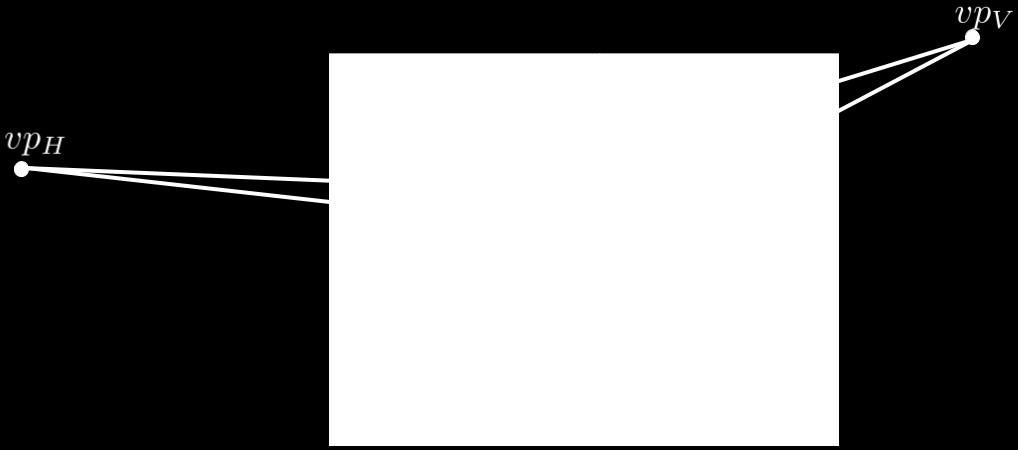
23 Methodology: Parametrization 23 / 1
24 Methodology: Parametrization Create a grid by emanating rays from the vanishing points 24 / 1
25 Methodology: Parametrization 25 / 1
26 Methodology: Parametrization 26 / 1
 on the grid State space: Y = { } 4 i=1 [yi,min init, y i,max init ] N 4 27 /")
27 Methodology: Parametrization We parametrize the soccer field by four rays y = (y 1, y 2, y 3, y 4 ) on the grid State space: Y = { } 4 i=1 [yi,min init, y i,max init ] N 4 27 / 1
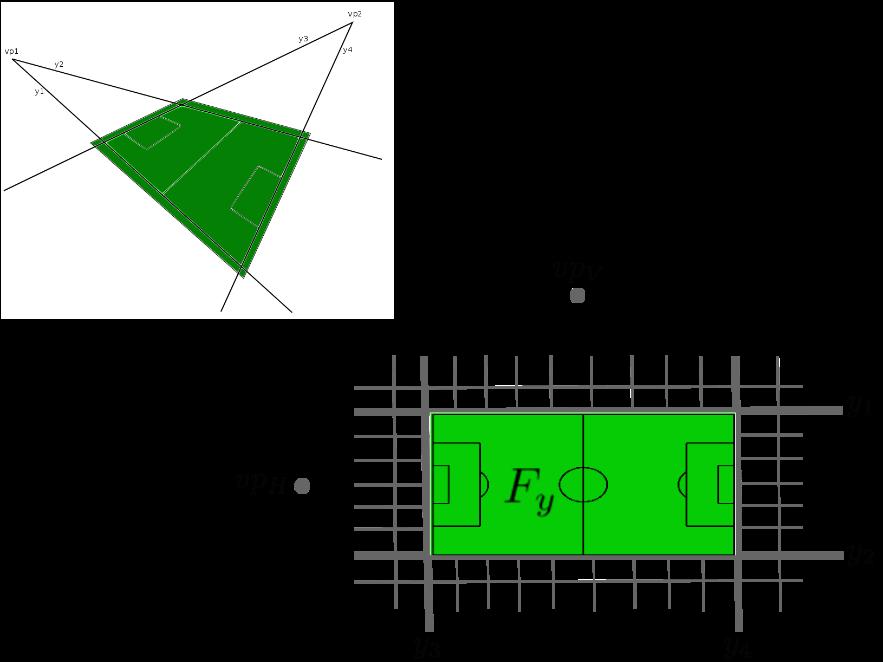

28 Methodology: Parametrization 28 / 1
29 Inference Task Given an image x of the field, obtain the best prediction of the touchlines and the goallines by solving the following inference task: φ(x, y): feature vector ŷ = arg max y Y w T φ(x, y) w: weights to be learned from training data Note: Y (#rays from vp H ) 2 (#rays from vp V ) 2 We find an exact solution by using branch and bound for inference. More on that later 29 / 1
30 Model: Features A soccer field is made up of grass and there are white marking corresponding to lines and circles with fixed dimensions We incorporate these as features. 30 / 1
31 Model: Features We need good features in the presence of noise Different weather and lighting conditions and shadows Methods based on heuristics are very fragile 31 / 1
32 Model: Features - Semantic Segmentaition Train a semantic segmentation network to classify image pixels to either belonging to: 1. Vertical Lines 2. Horizontal Lines 3. Middle Circle 4. Side Circles 5. Grass 6. Outside 32 / 1

33 Model: Features - Some Examples 33 / 1

34 Model: Features - Some Examples 34 / 1

35 Model: Features - Some Examples 35 / 1

36 Model: Features Grass 36 / 1
37 Model: Features Lines 7 vertical line segments corresponding to vp V and 10 horizontal line segments corresponding to vp H 37 / 1
38 Model: Features Lines Given y, need to construct a potential function that is large when the projection of each line segment in the image x is close to its ground truth. But given y, where does each line segment fall in the image x? Use Cross Ratios: Given 4 points A, B, C, D on a line, their cross ratio is given by: CR(A, B, C, D) = A C B D B C A D Cross ratios invariant under any projective transformation. 38 / 1
39 Model: Features Lines Use cross ratios to find the position of each line on the grid 39 / 1
40 Model: Features Lines For example for line l 3 : 40 / 1

41 Model: Features Circles A cemicircle on each side of the field C 2, C 3 and a circle in the middle: 41 / 1

42 Model: Features Circles Transformed to ellipses C k in x 42 / 1
43 Model: Features Circles Similar to line potentials, want potential functions that count the fraction of supporting pixels in the image x for each circular shape C i given a hypothesis field y Unlike lines, the ellipses don t fall on the grid. Ellipse detection: slow and unreliable 43 / 1
44 Model: Features Circles For each circle there are unique inscribing and circumscribing rectangles aligned with the vanishing points. Similar to lines, we can find the quadrilaterals associated with these rectangles on the grid Y. 44 / 1
45 Model: Features Efficient Computation We have positive features. Can use 3d accumulators to compute the potentials efficiently. Schwing et al / 1
46 Branch and Bound Inference Inference task ŷ = arg max y Y w T φ(x, y) Aim to do it efficiently and exactly Exactness comes from using branch and bound Efficiency comes from using integral images and tight upper bounds in branch and bound 46 / 1
47 Branch and Bound Inference 3 Ingredients Suppose Y Y = { } 4 i=1 [yi,min init, y i,max init ] is a subset of parametrized fields. Branch and bound needs A branching mechanism that divides the set Y into two disjoint subsets Y 1 and Y 2 of parametrized fields. A set function f such that f (Y ) max y Y w t φ(x, y). A priority queue PQ which orders sets of parametrized fields Y according to f. 47 / 1
48 Branch and Bound Inference Optimality In order to guarantee the optimality of the converged solution: 1. f (Y ) max y Y w t φ(x, y) for any arbitrary Y Y 2. f (Y ) = w t φ(x, y) when Y = {y} 48 / 1

49 Branch and Bound Inference Branching How to branch a set Y = 4 i=1 {[y i,min, y i,max ]} Y into two disjoint sets Y 1 and Y 2 49 / 1

50 Branch and Bound Inference Branching 50 / 1

51 Branch and Bound Inference Branching 51 / 1
52 Branch and Bound Inference Bounding Decompose φ(x, y) into potential with strictly positive weights and those with weights that are either zero or negative: w T φ(x, y) = w T neg φ neg (x, y) + w T posφ pos (x, y) Construct a lower bound set function φ i,neg and an upper bound set function φ j,pos such that φ i,neg (x, Y ) φ i,neg (x, y) φ j,pos (x, Y ) φ j,pos (x, y) y Y y Y 52 / 1
53 Branch and Bound Inference Bounding Grass Grass Potential: φ G (x, y) = ( # of grass pixels in Fy total # of grass pixels, # of non-grass pixels in F y c ) total # of non-grass pixels 53 / 1

54 Branch and Bound Inference Bounding Grass 54 / 1
55 Branch and Bound Inference Bounding Grass Note that for any field y Y, we have The above relation implies that F y F y F y # of grass pixels inside F y # of grass pixels inside F y # of grass pixels inside F y 55 / 1
56 Branch and Bound Inference Bounding Grass Hence, we can define the upper bound for the grass potential as: φ G,pos (x, Y ) = φ G (x, y ) Similarly, a lower bound can be defined as: φ G,neg (x, Y ) = φ G (x, y ) 56 / 1
57 Branch and Bound Inference Bounding Lines 57 / 1
58 Branch and Bound Inference Bounding Ellipses 58 / 1
59 Learning Structural SVM min w The outputs y = (y 1,..., y 4 ) of equation (1) are discrete random variable with complex dependencies, Use SSVM Given a dataset of ground truth training pairs { x (i), y (i)} N i=1 we learn the parameters w by solving the following optimization problem 1 2 w 2 + C N N n=1 where : Y Y R + {0} ( max (y (n), ŷ) + w T φ(x (n), ŷ) w T φ(x (n), y (n) ) ) ŷ Y 59 / 1
60 Learning Structural SVM A hypothesis field ŷ Tŷ be the collection of cells in the grid Y corresponding to the region inside the quadrilateral defined by ŷ T c ŷ be the complement of T ŷ in the grid Y (y, ŷ) = 1 # of GT cells in T ŷ + # of cells NGT in T c ŷ Total number of cells in Y 60 / 1
61 Experiments: Datasets: 395 images from 20 games from World Cup train/val from 10 games 186 test from the 10 other games 4000 images from 10 NHL games 2000 train/val 2000 test 61 / 1
arxiv: v1 [cs.cv] 10 Apr 2016
![arxiv: v1 [cs.cv] 10 Apr 2016](/thumbs/82/84795733.jpg "arxiv: v1 [cs.cv] 10 Apr 2016") arxiv:1604.02715v1 [cs.cv] 10 Apr 2016 Soccer Field Localization from a Single Image Namdar Homayounfar,, Sanja Fidler, Raquel Urtasun Department of Computer Science, University of Toronto Department of
arxiv:1604.02715v1 [cs.cv] 10 Apr 2016 Soccer Field Localization from a Single Image Namdar Homayounfar,, Sanja Fidler, Raquel Urtasun Department of Computer Science, University of Toronto Department of
Sports Field Localization via Deep Structured Models
 Sports Field Localization via Deep Structured Models Namdar Homayounfar Sanja Fidler Department of Computer Science University of Toronto {namdar, fidler, urtasun}@cs.toronto.edu Raquel Urtasun Abstract
Sports Field Localization via Deep Structured Models Namdar Homayounfar Sanja Fidler Department of Computer Science University of Toronto {namdar, fidler, urtasun}@cs.toronto.edu Raquel Urtasun Abstract
ATIP A Tool for 3D Navigation inside a Single Image with Automatic Camera Calibration
 ATIP A Tool for 3D Navigation inside a Single Image with Automatic Camera Calibration Kévin Boulanger, Kadi Bouatouch, Sumanta Pattanaik IRISA, Université de Rennes I, France University of Central Florida,
ATIP A Tool for 3D Navigation inside a Single Image with Automatic Camera Calibration Kévin Boulanger, Kadi Bouatouch, Sumanta Pattanaik IRISA, Université de Rennes I, France University of Central Florida,
Visual Recognition: Examples of Graphical Models
 Visual Recognition: Examples of Graphical Models Raquel Urtasun TTI Chicago March 6, 2012 Raquel Urtasun (TTI-C) Visual Recognition March 6, 2012 1 / 64 Graphical models Applications Representation Inference
Visual Recognition: Examples of Graphical Models Raquel Urtasun TTI Chicago March 6, 2012 Raquel Urtasun (TTI-C) Visual Recognition March 6, 2012 1 / 64 Graphical models Applications Representation Inference
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS
 METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
3D Reconstruction from Scene Knowledge
 Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Decomposing a Scene into Geometric and Semantically Consistent Regions
 Decomposing a Scene into Geometric and Semantically Consistent Regions Stephen Gould sgould@stanford.edu Richard Fulton rafulton@cs.stanford.edu Daphne Koller koller@cs.stanford.edu IEEE International
Decomposing a Scene into Geometric and Semantically Consistent Regions Stephen Gould sgould@stanford.edu Richard Fulton rafulton@cs.stanford.edu Daphne Koller koller@cs.stanford.edu IEEE International
Mysteries of Parameterizing Camera Motion - Part 1
 Mysteries of Parameterizing Camera Motion - Part 1 Instructor - Simon Lucey 16-623 - Advanced Computer Vision Apps Today Motivation SO(3) Convex? Exponential Maps SL(3) Group. Adapted from: Computer vision:
Mysteries of Parameterizing Camera Motion - Part 1 Instructor - Simon Lucey 16-623 - Advanced Computer Vision Apps Today Motivation SO(3) Convex? Exponential Maps SL(3) Group. Adapted from: Computer vision:
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
Stereo Epipolar Geometry for General Cameras. Sanja Fidler CSC420: Intro to Image Understanding 1 / 33
 Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Compositing a bird's eye view mosaic
 Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
Geometry I Can Statements I can describe the undefined terms: point, line, and distance along a line in a plane I can describe the undefined terms:
 Geometry I Can Statements I can describe the undefined terms: point, line, and distance along a line in a plane I can describe the undefined terms: point, line, and distance along a line in a plane I can
Geometry I Can Statements I can describe the undefined terms: point, line, and distance along a line in a plane I can describe the undefined terms: point, line, and distance along a line in a plane I can
CS4758: Rovio Augmented Vision Mapping Project
 CS4758: Rovio Augmented Vision Mapping Project Sam Fladung, James Mwaura Abstract The goal of this project is to use the Rovio to create a 2D map of its environment using a camera and a fixed laser pointer
CS4758: Rovio Augmented Vision Mapping Project Sam Fladung, James Mwaura Abstract The goal of this project is to use the Rovio to create a 2D map of its environment using a camera and a fixed laser pointer
URBAN STRUCTURE ESTIMATION USING PARALLEL AND ORTHOGONAL LINES
 URBAN STRUCTURE ESTIMATION USING PARALLEL AND ORTHOGONAL LINES An Undergraduate Research Scholars Thesis by RUI LIU Submitted to Honors and Undergraduate Research Texas A&M University in partial fulfillment
URBAN STRUCTURE ESTIMATION USING PARALLEL AND ORTHOGONAL LINES An Undergraduate Research Scholars Thesis by RUI LIU Submitted to Honors and Undergraduate Research Texas A&M University in partial fulfillment
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Latent Variable Models for Structured Prediction and Content-Based Retrieval
 Latent Variable Models for Structured Prediction and Content-Based Retrieval Ariadna Quattoni Universitat Politècnica de Catalunya Joint work with Borja Balle, Xavier Carreras, Adrià Recasens, Antonio
Latent Variable Models for Structured Prediction and Content-Based Retrieval Ariadna Quattoni Universitat Politècnica de Catalunya Joint work with Borja Balle, Xavier Carreras, Adrià Recasens, Antonio
HOUGH TRANSFORM CS 6350 C V
 HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Object Detection. Sanja Fidler CSC420: Intro to Image Understanding 1/ 1
 Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
ECE 470: Homework 5. Due Tuesday, October 27 in Seth Hutchinson. Luke A. Wendt
 ECE 47: Homework 5 Due Tuesday, October 7 in class @:3pm Seth Hutchinson Luke A Wendt ECE 47 : Homework 5 Consider a camera with focal length λ = Suppose the optical axis of the camera is aligned with
ECE 47: Homework 5 Due Tuesday, October 7 in class @:3pm Seth Hutchinson Luke A Wendt ECE 47 : Homework 5 Consider a camera with focal length λ = Suppose the optical axis of the camera is aligned with
Understanding Tracking and StroMotion of Soccer Ball
 Understanding Tracking and StroMotion of Soccer Ball Nhat H. Nguyen Master Student 205 Witherspoon Hall Charlotte, NC 28223 704 656 2021 rich.uncc@gmail.com ABSTRACT Soccer requires rapid ball movements.
Understanding Tracking and StroMotion of Soccer Ball Nhat H. Nguyen Master Student 205 Witherspoon Hall Charlotte, NC 28223 704 656 2021 rich.uncc@gmail.com ABSTRACT Soccer requires rapid ball movements.
The feature set you are required to implement in your ray tracer is as follows (by order from easy to hard):
:") Ray Tracing exercise TAU, Computer Graphics, 0368.3014, semester B Go to the Updates and FAQ Page Overview The objective of this exercise is to implement a ray casting/tracing engine. Ray tracing is a
Ray Tracing exercise TAU, Computer Graphics, 0368.3014, semester B Go to the Updates and FAQ Page Overview The objective of this exercise is to implement a ray casting/tracing engine. Ray tracing is a
Ohio Tutorials are designed specifically for the Ohio Learning Standards to prepare students for the Ohio State Tests and end-ofcourse
 Tutorial Outline Ohio Tutorials are designed specifically for the Ohio Learning Standards to prepare students for the Ohio State Tests and end-ofcourse exams. Math Tutorials offer targeted instruction,
Tutorial Outline Ohio Tutorials are designed specifically for the Ohio Learning Standards to prepare students for the Ohio State Tests and end-ofcourse exams. Math Tutorials offer targeted instruction,
Ohio s Learning Standards Mathematics Scope and Sequence YEC Geometry
 Youngstown City School District English Language Arts Scope and Sequence Grade K Ohio s Learning Standards Mathematics Scope and Sequence YEC Geometry Mathematics Standards Scope and Sequence, YEC Geometry
Youngstown City School District English Language Arts Scope and Sequence Grade K Ohio s Learning Standards Mathematics Scope and Sequence YEC Geometry Mathematics Standards Scope and Sequence, YEC Geometry
Feature Extractors. CS 188: Artificial Intelligence Fall Some (Vague) Biology. The Binary Perceptron. Binary Decision Rule.
 Biology. The Binary Perceptron. Binary Decision Rule.") CS 188: Artificial Intelligence Fall 2008 Lecture 24: Perceptrons II 11/24/2008 Dan Klein UC Berkeley Feature Extractors A feature extractor maps inputs to feature vectors Dear Sir. First, I must solicit
CS 188: Artificial Intelligence Fall 2008 Lecture 24: Perceptrons II 11/24/2008 Dan Klein UC Berkeley Feature Extractors A feature extractor maps inputs to feature vectors Dear Sir. First, I must solicit
Markov Networks in Computer Vision. Sargur Srihari
 Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Video Google: A Text Retrieval Approach to Object Matching in Videos
 Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Fitting D.A. Forsyth, CS 543
 Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
AUTOMATIC RECTIFICATION OF LONG IMAGE SEQUENCES. Kenji Okuma, James J. Little, David G. Lowe
 AUTOMATIC RECTIFICATION OF LONG IMAGE SEQUENCES Kenji Okuma, James J. Little, David G. Lowe The Laboratory of Computational Intelligence The University of British Columbia Vancouver, British Columbia,
AUTOMATIC RECTIFICATION OF LONG IMAGE SEQUENCES Kenji Okuma, James J. Little, David G. Lowe The Laboratory of Computational Intelligence The University of British Columbia Vancouver, British Columbia,
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
To earn the extra credit, one of the following has to hold true. Please circle and sign.
 CS 188 Spring 2011 Introduction to Artificial Intelligence Practice Final Exam To earn the extra credit, one of the following has to hold true. Please circle and sign. A I spent 3 or more hours on the
CS 188 Spring 2011 Introduction to Artificial Intelligence Practice Final Exam To earn the extra credit, one of the following has to hold true. Please circle and sign. A I spent 3 or more hours on the
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Assignment 2 : Projection and Homography
 TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
Improving Recognition through Object Sub-categorization
 Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
TorontoCity: Seeing the World with a Million Eyes
 TorontoCity: Seeing the World with a Million Eyes Authors Shenlong Wang, Min Bai, Gellert Mattyus, Hang Chu, Wenjie Luo, Bin Yang Justin Liang, Joel Cheverie, Sanja Fidler, Raquel Urtasun * Project Completed
TorontoCity: Seeing the World with a Million Eyes Authors Shenlong Wang, Min Bai, Gellert Mattyus, Hang Chu, Wenjie Luo, Bin Yang Justin Liang, Joel Cheverie, Sanja Fidler, Raquel Urtasun * Project Completed
CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves
 CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation
CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
3D Shape Analysis with Multi-view Convolutional Networks. Evangelos Kalogerakis
 3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
Translation Symmetry Detection: A Repetitive Pattern Analysis Approach
 2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
Imagining the Unseen: Stability-based Cuboid Arrangements for Scene Understanding
 : Stability-based Cuboid Arrangements for Scene Understanding Tianjia Shao* Aron Monszpart Youyi Zheng Bongjin Koo Weiwei Xu Kun Zhou * Niloy J. Mitra * Background A fundamental problem for single view
: Stability-based Cuboid Arrangements for Scene Understanding Tianjia Shao* Aron Monszpart Youyi Zheng Bongjin Koo Weiwei Xu Kun Zhou * Niloy J. Mitra * Background A fundamental problem for single view
CSE 573: Artificial Intelligence Autumn 2010
 CSE 573: Artificial Intelligence Autumn 2010 Lecture 16: Machine Learning Topics 12/7/2010 Luke Zettlemoyer Most slides over the course adapted from Dan Klein. 1 Announcements Syllabus revised Machine
CSE 573: Artificial Intelligence Autumn 2010 Lecture 16: Machine Learning Topics 12/7/2010 Luke Zettlemoyer Most slides over the course adapted from Dan Klein. 1 Announcements Syllabus revised Machine
Today. Anti-aliasing Surface Parametrization Soft Shadows Global Illumination. Exercise 2. Path Tracing Radiosity
 Today Anti-aliasing Surface Parametrization Soft Shadows Global Illumination Path Tracing Radiosity Exercise 2 Sampling Ray Casting is a form of discrete sampling. Rendered Image: Sampling of the ground
Today Anti-aliasing Surface Parametrization Soft Shadows Global Illumination Path Tracing Radiosity Exercise 2 Sampling Ray Casting is a form of discrete sampling. Rendered Image: Sampling of the ground
Ground Plane Rectification by Tracking Moving Objects
 Ground Plane Rectification by Tracking Moving Objects Biswajit Bose and Eric Grimson Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology Cambridge, MA 2139, USA
Ground Plane Rectification by Tracking Moving Objects Biswajit Bose and Eric Grimson Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology Cambridge, MA 2139, USA
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: :59AM
 CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
TD2 : Stereoscopy and Tracking: solutions
 TD2 : Stereoscopy and Tracking: solutions Preliminary: λ = P 0 with and λ > 0. If camera undergoes the rigid transform: (R,T), then with, so that is the intrinsic parameter matrix. C(Cx,Cy,Cz) is the point
TD2 : Stereoscopy and Tracking: solutions Preliminary: λ = P 0 with and λ > 0. If camera undergoes the rigid transform: (R,T), then with, so that is the intrinsic parameter matrix. C(Cx,Cy,Cz) is the point
Plane rectification in real time on an Android device Final report
 Plane rectification in real time on an Android device Final report Jean-Baptiste Boin Stanford University jbboin@stanford.edu 1. Introduction The development of reliable keypoint detectors, like the Harris
Plane rectification in real time on an Android device Final report Jean-Baptiste Boin Stanford University jbboin@stanford.edu 1. Introduction The development of reliable keypoint detectors, like the Harris
Augmenting Reality, Naturally:
 Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
GEOMETRY CCR MATH STANDARDS
 CONGRUENCE, PROOF, AND CONSTRUCTIONS M.GHS. M.GHS. M.GHS. GEOMETRY CCR MATH STANDARDS Mathematical Habits of Mind. Make sense of problems and persevere in solving them.. Use appropriate tools strategically..
CONGRUENCE, PROOF, AND CONSTRUCTIONS M.GHS. M.GHS. M.GHS. GEOMETRY CCR MATH STANDARDS Mathematical Habits of Mind. Make sense of problems and persevere in solving them.. Use appropriate tools strategically..
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION
 COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
Markov Networks in Computer Vision
 Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
CS 558: Computer Vision 13 th Set of Notes
 CS 558: Computer Vision 13 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Context and Spatial Layout
CS 558: Computer Vision 13 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Context and Spatial Layout
PanoContext: A Whole-room 3D Context Model for Panoramic Scene Understanding
 PanoContext: A Whole-room 3D Context Model for Panoramic Scene Understanding Yinda Zhang Shuran Song Ping Tan Jianxiong Xiao Princeton University Simon Fraser University Alicia Clark PanoContext October
PanoContext: A Whole-room 3D Context Model for Panoramic Scene Understanding Yinda Zhang Shuran Song Ping Tan Jianxiong Xiao Princeton University Simon Fraser University Alicia Clark PanoContext October
Final Review CMSC 733 Fall 2014
 Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
Classification: Feature Vectors
 Classification: Feature Vectors Hello, Do you want free printr cartriges? Why pay more when you can get them ABSOLUTELY FREE! Just # free YOUR_NAME MISSPELLED FROM_FRIEND... : : : : 2 0 2 0 PIXEL 7,12
Classification: Feature Vectors Hello, Do you want free printr cartriges? Why pay more when you can get them ABSOLUTELY FREE! Just # free YOUR_NAME MISSPELLED FROM_FRIEND... : : : : 2 0 2 0 PIXEL 7,12
Lecture on Modeling Tools for Clustering & Regression
 Lecture on Modeling Tools for Clustering & Regression CS 590.21 Analysis and Modeling of Brain Networks Department of Computer Science University of Crete Data Clustering Overview Organizing data into
Lecture on Modeling Tools for Clustering & Regression CS 590.21 Analysis and Modeling of Brain Networks Department of Computer Science University of Crete Data Clustering Overview Organizing data into
Computer Vision I Name : CSE 252A, Fall 2012 Student ID : David Kriegman Assignment #1. (Due date: 10/23/2012) x P. = z
 x P. = z") Computer Vision I Name : CSE 252A, Fall 202 Student ID : David Kriegman E-Mail : Assignment (Due date: 0/23/202). Perspective Projection [2pts] Consider a perspective projection where a point = z y x P
Computer Vision I Name : CSE 252A, Fall 202 Student ID : David Kriegman E-Mail : Assignment (Due date: 0/23/202). Perspective Projection [2pts] Consider a perspective projection where a point = z y x P
Common Core State Standards for Mathematics High School
 Using the Program for Success Common Core State Standards for Mathematics High School The following shows the High School Standards for Mathematical Content that are taught in Pearson Common Core Edition
Using the Program for Success Common Core State Standards for Mathematics High School The following shows the High School Standards for Mathematical Content that are taught in Pearson Common Core Edition
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
Viewpoint Invariant Features from Single Images Using 3D Geometry
 Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
FAST-MATCH: FAST AFFINE TEMPLATE MATCHING
 Seminar on Sublinear Time Algorithms FAST-MATCH: FAST AFFINE TEMPLATE MATCHING KORMAN, S., REICHMAN, D., TSUR, G., & AVIDAN, S., 2013 Given by: Shira Faigenbaum-Golovin Tel-Aviv University 27.12.2015 Problem
Seminar on Sublinear Time Algorithms FAST-MATCH: FAST AFFINE TEMPLATE MATCHING KORMAN, S., REICHMAN, D., TSUR, G., & AVIDAN, S., 2013 Given by: Shira Faigenbaum-Golovin Tel-Aviv University 27.12.2015 Problem
Figure 1: Workflow of object-based classification
 Technical Specifications Object Analyst Object Analyst is an add-on package for Geomatica that provides tools for segmentation, classification, and feature extraction. Object Analyst includes an all-in-one
Technical Specifications Object Analyst Object Analyst is an add-on package for Geomatica that provides tools for segmentation, classification, and feature extraction. Object Analyst includes an all-in-one
Canny Edge Based Self-localization of a RoboCup Middle-sized League Robot
 Canny Edge Based Self-localization of a RoboCup Middle-sized League Robot Yoichi Nakaguro Sirindhorn International Institute of Technology, Thammasat University P.O. Box 22, Thammasat-Rangsit Post Office,
Canny Edge Based Self-localization of a RoboCup Middle-sized League Robot Yoichi Nakaguro Sirindhorn International Institute of Technology, Thammasat University P.O. Box 22, Thammasat-Rangsit Post Office,
Learning to Grasp Objects: A Novel Approach for Localizing Objects Using Depth Based Segmentation
 Learning to Grasp Objects: A Novel Approach for Localizing Objects Using Depth Based Segmentation Deepak Rao, Arda Kara, Serena Yeung (Under the guidance of Quoc V. Le) Stanford University Abstract We
Learning to Grasp Objects: A Novel Approach for Localizing Objects Using Depth Based Segmentation Deepak Rao, Arda Kara, Serena Yeung (Under the guidance of Quoc V. Le) Stanford University Abstract We
Detecting Multiple Symmetries with Extended SIFT
 1 Detecting Multiple Symmetries with Extended SIFT 2 3 Anonymous ACCV submission Paper ID 388 4 5 6 7 8 9 10 11 12 13 14 15 16 Abstract. This paper describes an effective method for detecting multiple
1 Detecting Multiple Symmetries with Extended SIFT 2 3 Anonymous ACCV submission Paper ID 388 4 5 6 7 8 9 10 11 12 13 14 15 16 Abstract. This paper describes an effective method for detecting multiple
3D Polygon Rendering. Many applications use rendering of 3D polygons with direct illumination
 Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
Lecture 3 February 9, 2010
 6.851: Advanced Data Structures Spring 2010 Dr. André Schulz Lecture 3 February 9, 2010 Scribe: Jacob Steinhardt and Greg Brockman 1 Overview In the last lecture we continued to study binary search trees
6.851: Advanced Data Structures Spring 2010 Dr. André Schulz Lecture 3 February 9, 2010 Scribe: Jacob Steinhardt and Greg Brockman 1 Overview In the last lecture we continued to study binary search trees
3D graphics, raster and colors CS312 Fall 2010
 Computer Graphics 3D graphics, raster and colors CS312 Fall 2010 Shift in CG Application Markets 1989-2000 2000 1989 3D Graphics Object description 3D graphics model Visualization 2D projection that simulates
Computer Graphics 3D graphics, raster and colors CS312 Fall 2010 Shift in CG Application Markets 1989-2000 2000 1989 3D Graphics Object description 3D graphics model Visualization 2D projection that simulates
Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material
 Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material Peak memory usage, GB 10 1 0.1 0.01 OGN Quadratic Dense Cubic Iteration time, s 10
Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material Peak memory usage, GB 10 1 0.1 0.01 OGN Quadratic Dense Cubic Iteration time, s 10
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Title: Vanishing Hull: A Geometric Concept for Vanishing Points Detection and Analysis
 Pattern Recognition Manuscript Draft Manuscript Number: Title: Vanishing Hull: A Geometric Concept for Vanishing Points Detection and Analysis Article Type: Full Length Article Section/Category: Keywords:
Pattern Recognition Manuscript Draft Manuscript Number: Title: Vanishing Hull: A Geometric Concept for Vanishing Points Detection and Analysis Article Type: Full Length Article Section/Category: Keywords:
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Graphics 2009/2010, period 1. Lecture 8: ray tracing
 Graphics 2009/2010, period 1 Lecture 8 Ray tracing Original plan Finish the basic stuff (book ch 1-9) today: We will not look into signal processing (chapter 4) We will look at triangle rasterization (cf.
Graphics 2009/2010, period 1 Lecture 8 Ray tracing Original plan Finish the basic stuff (book ch 1-9) today: We will not look into signal processing (chapter 4) We will look at triangle rasterization (cf.
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Crowdsourcing Annotations for Visual Object Detection
 Crowdsourcing Annotations for Visual Object Detection Hao Su, Jia Deng, Li Fei-Fei Computer Science Department, Stanford University Abstract A large number of images with ground truth object bounding boxes
Crowdsourcing Annotations for Visual Object Detection Hao Su, Jia Deng, Li Fei-Fei Computer Science Department, Stanford University Abstract A large number of images with ground truth object bounding boxes
Announcements. CS 188: Artificial Intelligence Spring Classification: Feature Vectors. Classification: Weights. Learning: Binary Perceptron
 CS 188: Artificial Intelligence Spring 2010 Lecture 24: Perceptrons and More! 4/20/2010 Announcements W7 due Thursday [that s your last written for the semester!] Project 5 out Thursday Contest running
CS 188: Artificial Intelligence Spring 2010 Lecture 24: Perceptrons and More! 4/20/2010 Announcements W7 due Thursday [that s your last written for the semester!] Project 5 out Thursday Contest running
Stereo and structured light
 Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Textureless Layers CMU-RI-TR Qifa Ke, Simon Baker, and Takeo Kanade
 Textureless Layers CMU-RI-TR-04-17 Qifa Ke, Simon Baker, and Takeo Kanade The Robotics Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA 15213 Abstract Layers are one of the most well
Textureless Layers CMU-RI-TR-04-17 Qifa Ke, Simon Baker, and Takeo Kanade The Robotics Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA 15213 Abstract Layers are one of the most well
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
GENERALIZING THE HOUGH TRANSFORM TO DETECT ARBITRARY SHAPES. D. H. Ballard Pattern Recognition Vol. 13 No
 GENERALIZING THE HOUGH TRANSFORM TO DETECT ARBITRARY SHAPES D. H. Ballard Pattern Recognition Vol. 13 No. 2 1981 What is the generalized Hough (Huff) transform used for? Hough transform is a way of encoding
GENERALIZING THE HOUGH TRANSFORM TO DETECT ARBITRARY SHAPES D. H. Ballard Pattern Recognition Vol. 13 No. 2 1981 What is the generalized Hough (Huff) transform used for? Hough transform is a way of encoding
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
YEC Geometry Scope and Sequence Pacing Guide
 YEC Scope and Sequence Pacing Guide Quarter 1st 2nd 3rd 4th Units 1 2 3 4 5 6 7 8 G.CO.1 G.CO.2 G.CO.6 G.CO.9 G.CO.3 G.CO.7 G.CO.10 G.CO.4 G.CO.8 G.CO.11 Congruence G.CO.5 G.CO.12 G.CO.13 Similarity, Right
YEC Scope and Sequence Pacing Guide Quarter 1st 2nd 3rd 4th Units 1 2 3 4 5 6 7 8 G.CO.1 G.CO.2 G.CO.6 G.CO.9 G.CO.3 G.CO.7 G.CO.10 G.CO.4 G.CO.8 G.CO.11 Congruence G.CO.5 G.CO.12 G.CO.13 Similarity, Right