CS 558: Computer Vision 4 th Set of Notes
|
|
|
- Angelina Sanders
- 6 years ago
- Views:
Transcription
1 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: Philippos.Mordohai@stevens.edu Office: Lieb 215
2 Overview Keypoint matching Hessian detector Blob detection Feature descriptors Fitting RANSAC Based on slides by S. Lazebnik and D. Hoiem 2


3 Overview of Keypoint Matching 1. Find a set of distinctive keypoints A 2 A 1 A3 2. Define a region around each keypoint f A d( f A, f B ) T K. Grauman, B. Leibe f B 3. Extract and normalize the region content 4. Compute a local descriptor from the normalized region 5. Match local descriptors



4 Goals for Keypoints Detect points that are repeatable and distinctive


5 Key trade-offs A 1 A 2 A 3 Detection More Repeatable Robust detection Precise localization More Points Robust to occlusion Works with less texture Description More Distinctive Minimize wrong matches More Flexible Robust to expected variations Maximize correct matches
6 Hessian Detector [Beaudet78] Hessian determinant I xx Hessian ( I) I I xx xy I I xy yy I yy I xy Intuition: Search for strong curvature in two orthogonal directions K. Grauman, B. Leibe

 I I xx xy ( x, ) ( x,")


 In Matlab: I xx.")
7 Hessian Detector [Beaudet78] Hessian determinant I xx Hessian ( x, ) I I xx xy ( x, ) ( x, ) I I xy yy ( x, ) ( x, ) I yy det M trace M I xy Find maxima of determinant det( Hessian( x)) I xx ( x) I yy ( x) I 2 xy ( x) In Matlab: I xx. I yy ( I xy )^2 K. Grauman, B. Leibe


8 Hessian Detector Responses [Beaudet78] Effect: Responses mainly on corners and strongly textured areas.

9 Hessian Detector Responses [Beaudet78]
10 So far: can localize in x-y, but not scale
11 Automatic Scale Selection f I (, )) ( (, i x f I x )) 1im i im ( 1 How to find corresponding patch sizes? K. Grauman, B. Leibe
12 Automatic Scale Selection Function responses for increasing scale (scale signature) ( x, )) f ( I i i m 1 ( x, )) m K. Grauman, B. Leibe i i f ( I 1
13 Automatic Scale Selection Function responses for increasing scale (scale signature) ( x, )) f ( I i i m 1 ( x, )) m K. Grauman, B. Leibe i i f ( I 1
14 Automatic Scale Selection Function responses for increasing scale (scale signature) ( x, )) f I (, )) i i m m K. Grauman, B. Leibe i i f ( I 1 ( 1 x
15 Blob detection

16 Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation
17 Blob detection: Basic idea To detect blobs, convolve the image with a blob filter at multiple scales and look for extrema of filter response in the resulting scale space


18 Blob detection: Basic idea minima * = maxima Find maxima and minima of blob filter response in space and scale Source: N. Snavely
19 Blob filter Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g 2 x g 2 2 y g 2
20 Recall: Edge detection f Edge d dx g Derivative of Gaussian f d dx g Edge = maximum of derivative Source: S. Seitz
21 Edge detection, Take 2 f Edge d dx 2 2 g Second derivative of Gaussian (Laplacian) d dx 2 f 2 g Edge = zero crossing of second derivative Source: S. Seitz
22 From edges to blobs Edge = ripple Blob = superposition of two ripples maximum Spatial selection: the magnitude of the Laplacian response will achieve a maximum at the center of the blob, provided the scale of the Laplacian is matched to the scale of the blob
23 Scale selection We want to find the characteristic scale of the blob by convolving it with Laplacians at several scales and looking for the maximum response However, Laplacian response decays as scale increases: original signal (radius=8) increasing σ

24 Scale normalization The response of a derivative of Gaussian filter to a perfect step edge decreases as σ increases 1 2
25 Scale normalization The response of a derivative of Gaussian filter to a perfect step edge decreases as σ increases To keep response the same (scaleinvariant), must multiply Gaussian derivative by σ Laplacian is the second Gaussian derivative, so it must be multiplied by σ 2
26 Effect of scale normalization Original signal Unnormalized Laplacian response Scale-normalized Laplacian response maximum

27 Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D Scale-normalized: g g 2 g 2 norm x 2 y 2 2 2
28 Scale selection At what scale does the Laplacian achieve a maximum response to a binary circle of radius r? To get maximum response, the zeros of the Laplacian have to be aligned with the circle The Laplacian is given by (up to scale): ( x 2 y ) ( x Therefore, the maximum response occurs at e 2 y 2 )/ 2 2 r / 2. circle r 0 Laplacian image
. \"Feature detection with automatic scale selection.")
29 Characteristic scale We define the characteristic scale of a blob as the scale that produces peak of Laplacian response in the blob center characteristic scale T. Lindeberg (1998). "Feature detection with automatic scale selection." International Journal of Computer Vision 30 (2): pp
30 Scale-space blob detector 1. Convolve image with scale-normalized Laplacian at several scales
31 Scale-space blob detector: Example


32 Scale-space blob detector: Example

33 Scale-space blob detector 1. Convolve image with scale-normalized Laplacian at several scales 2. Find maxima of squared Laplacian response in scale-space
34 Scale-space blob detector: Example
35 Approximating the Laplacian with a difference of Gaussians: 2 L Gxx x y Gyy x y (,, ) (,, ) (Laplacian) Efficient implementation DoG G( x, y, k ) G( x, y, ) (Difference of Gaussians)

36 Efficient implementation David G. Lowe. "Distinctive image features from scale-invariant keypoints. IJCV 60 (2), pp , 2004.
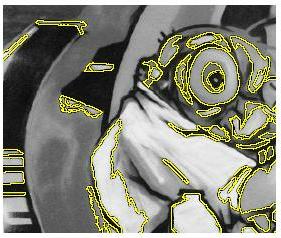
![Maximally Stable Extremal Regions [Matas 02] Based on Watershed segmentation](/docs-images/80/80999972/images/37-0.jpg "algorithm Select regions that stay stable over a large parameter range K.")
37 Maximally Stable Extremal Regions [Matas 02] Based on Watershed segmentation algorithm Select regions that stay stable over a large parameter range K. Grauman, B. Leibe


38 Example Results: MSER K. Grauman, B. Leibe
39 Local Descriptors The ideal descriptor should be Robust Distinctive Compact Efficient Most available descriptors focus on edge/gradient information Capture texture information Color rarely used K. Grauman, B. Leibe


40 From feature detection to feature description Scaled and rotated versions of the same neighborhood will give rise to blobs that are related by the same transformation What to do if we want to compare the appearance of these image regions? Normalization: transform these regions into same-size circles Problem: rotational ambiguity

41 Eliminating rotation ambiguity To assign a unique orientation to circular image windows: Create histogram of local gradient directions in the patch Assign canonical orientation at peak of smoothed histogram 0 2


42 SIFT features Detected features with characteristic scales and orientations: David G. Lowe. "Distinctive image features from scale-invariant keypoints. IJCV 60 (2), pp , 2004.
) Description is invariant: features(transform(image)) =")
43 From feature detection to feature description Detection is covariant: features(transform(image)) = transform(features(image)) Description is invariant: features(transform(image)) = features(image)



44 Properties of SIFT Extraordinarily robust detection and description technique Can handle changes in viewpoint Up to about 60 degree out-of-plane rotation Can handle significant changes in illumination Sometimes even day vs. night Fast and efficient can run in real time Lots of code available Source: N. Snavely


45 Local Descriptors: SIFT Descriptor [Lowe, ICCV 1999] K. Grauman, B. Leibe Histogram of oriented gradients Captures important texture information Robust to small translations / affine deformations
46 Details of Lowe s SIFT algorithm Run DoG detector Find maxima in location/scale space Remove edge points (bad localization) Find all major orientations Bin orientations into 36 bin histogram Weight by gradient magnitude Weight by distance to center (Gaussian-weighted mean) Return orientations within 0.8 of peak of histogram Use parabola for better orientation fit For each (x,y,scale,orientation), create descriptor: Sample 16x16 gradient mag. and rel. orientation Bin 4x4 samples into 4x4 histograms Threshold values to max of 0.2, divide by L2 norm Final descriptor: 4x4x8 normalized histograms r: eigenvalue ratio Lowe IJCV 2004
47 Matching SIFT Descriptors Nearest neighbor (Euclidean distance) Threshold ratio of nearest to 2 nd nearest descriptor Lowe IJCV 2004
48 SIFT Repeatability
49 SIFT Repeatability Lowe IJCV 2004


50 Local Descriptors: SURF Fast approximation of SIFT idea Efficient computation by 2D box filters & integral images 6 times faster than SIFT Equivalent quality for object identification [Bay, ECCV 06], [Cornelis, CVGPU 08] K. Grauman, B. Leibe

51 Local Descriptors: Shape Context Count the number of points inside each bin, e.g.: Count = 4... Count = 10 Log-polar binning: more precision for nearby points, more flexibility for farther points. Belongie & Malik, ICCV 2001 K. Grauman, B. Leibe
52 Choosing a detector What do you want it for? Precise localization in x-y: Harris Good localization in scale: Difference of Gaussian Flexible region shape: MSER Best choice often application dependent Harris-/Hessian-Laplace/DoG work well for many natural categories MSER works well for buildings and printed things Why choose? Get more points with more detectors There have been extensive evaluations/comparisons All detectors/descriptors shown here work well
53 Choosing a descriptor Again, need not stick to one For object instance recognition or stitching, SIFT or variant is a good choice

54 Things to remember Keypoint detection: repeatable and distinctive Corners, blobs, stable regions Harris, DoG Descriptors: robust and selective spatial histograms of orientation SIFT
55 Fitting


56 Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according to a simple model



57 Fitting Choose a parametric model to represent a set of features simple model: lines simple model: circles complicated model: car Source: K. Grauman
58 Fitting: Overview If we know which points belong to the line, how do we find the optimal line parameters? Least squares What if there are outliers? Robust fitting, RANSAC What if there are many lines? Voting methods: RANSAC, Hough transform What if we re not even sure it s a line? Model selection (not covered)
59 Least squares line fitting Data: (x 1, y 1 ),, (x n, y n ) Line equation: y i = m x i + b Find (m, b) to minimize Y X XB X db de T T b m B x x X y y Y XB Y E n n 1 1 where Pseudo-inverse solution n i i i b mx y E 1 2 ) ( (x i, y i ) y=mx+b Y X XB X T T ) ( ) ( ) 2( ) ( ) ( 2 XB XB Y XB Y Y XB Y XB Y XB Y E T T T T Y X X X B T T 1 ) (
60 Problem with vertical least squares Not rotation-invariant Fails completely for vertical lines
61 Total least squares Distance between point (x i, y i ) and line ax+by=d (a 2 +b 2 =1): ax i + by i d E n i 1 2 ( axi(x b i y, i y d i ) ax+by=d Unit normal: N=(a, b)
62 Total least squares Distance between point (x i, y i ) and line ax+by=d (a 2 +b 2 =1): ax i + by i d Find (a, b, d) to minimize the sum of squared perpendicular distances n E ax b y E n i 1 ( ax i b y i d 2 ) 2 ( i i(x i d 1 i, y i ) ax+by=d Unit normal: N=(a, b)
63 Total least squares Distance between point (x i, y i ) and line ax+by=d (a 2 +b 2 =1): ax i + by i d Find (a, b, d) to minimize the sum of squared perpendicular distances n i i i d b y ax E 1 2 ) ( (x i, y i ) ax+by=d n i i i d b y ax E 1 2 ) ( Unit normal: N=(a, b) 0 ) 2( 1 n i i i d b y ax d E b y ax y n b x n a d n i i n i i 1 1 ) ( ) ( )) ( ) ( ( UN UN b a y y x x y y x x y y b x x a E T n n n i i i 0 ) ( 2 N U U dn de T Solution to (U T U)N = 0, subject to N 2 = 1: eigenvector of U T U associated with the smallest eigenvalue (least squares solution to homogeneous linear system UN = 0)
64 Total least squares y y x x y y x x U n n 1 1 n i i n i i i n i i i n i i T y y y y x x y y x x x x U U ) ( ) )( ( ) )( ( ) ( ), ( y x N = (a, b) second moment matrix ), ( y y x x i i F&P (2 nd ed.) sec. 22.1
65 Least squares: Robustness to noise
66 Least squares: Robustness to noise Problem: squared error heavily penalizes outliers
67 RANSAC Random sample consensus (RANSAC): Very general framework for model fitting in the presence of outliers Outline Choose a small subset of points uniformly at random Fit a model to that subset Find all remaining points that are close to the model and reject the rest as outliers Do this many times and choose the best model M. A. Fischler, R. C. Bolles. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Comm. of the ACM, Vol 24, pp , 1981.
68 RANSAC for line fitting example Source: R. Raguram
69 RANSAC for line fitting example Least squares fit Source: R. Raguram
70 RANSAC for line fitting example 1. Randomly select minimal subset of points Source: R. Raguram
71 RANSAC for line fitting example 1. Randomly select minimal subset of points 2. Hypothesize a model Source: R. Raguram
72 RANSAC for line fitting example 1. Randomly select minimal subset of points 2. Hypothesize a model 3. Compute error function Source: R. Raguram
73 RANSAC for line fitting example 1. Randomly select minimal subset of points 2. Hypothesize a model 3. Compute error function 4. Select points consistent with model Source: R. Raguram
74 RANSAC for line fitting example 1. Randomly select minimal subset of points 2. Hypothesize a model 3. Compute error function 4. Select points consistent with model 5. Repeat hypothesize andverify loop Source: R. Raguram
75 RANSAC for line fitting example 1. Randomly select minimal subset of points 2. Hypothesize a model 3. Compute error function 4. Select points consistent with model 5. Repeat hypothesize andverify loop Source: R. Raguram
76 RANSAC for line fitting example Uncontaminated sample 1. Randomly select minimal subset of points 2. Hypothesize a model 3. Compute error function 4. Select points consistent with model 5. Repeat hypothesize andverify loop Source: R. Raguram
77 RANSAC for line fitting example 1. Randomly select minimal subset of points 2. Hypothesize a model 3. Compute error function 4. Select points consistent with model 5. Repeat hypothesize andverify loop Source: R. Raguram
78 RANSAC for line fitting Repeat N times: Draw s points uniformly at random Fit line to these s points Find inliers to this line among the remaining points (i.e., points whose distance from the line is less than t) If there are d or more inliers, accept the line and refit using all inliers
79 Choosing the parameters Initial number of points s Typically minimum number needed to fit the model Distance threshold t Choose t so probability for inlier is p (e.g. 0.95) Zero-mean Gaussian noise with std. dev. σ: t 2 =3.84σ 2 Number of samples N Choose N so that, with probability p, at least one random sample is free from outliers (e.g. p=0.99) (outlier ratio: e) Source: M. Pollefeys
80 Choosing the parameters Initial number of points s Typically minimum number needed to fit the model Number of samples N Choose N so that, with probability p, at least one random sample is free from outliers (e.g. p=0.99) (outlier ratio: e) s N 1 1 e 1 p N p/ log1 e log 1 1 s proportion of outliers e s 5% 10% 20% 25% 30% 40% 50% Source: M. Pollefeys
81 Choosing the parameters Initial number of points s Typically minimum number needed to fit the model Distance threshold t Choose t so probability for inlier is p (e.g. 0.95) Zero-mean Gaussian noise with std. dev. σ: t 2 =3.84σ 2 Number of samples N Choose N so that, with probability p, at least one random sample is free from outliers (e.g. p=0.99) (outlier ratio: e) Consensus set size d Should match expected inlier ratio Source: M. Pollefeys
82 Adaptively determining the number of samples Outlier ratio e is often unknown a priori, so pick worst case, e.g. 50%, and adapt if more inliers are found, e.g. 80% would yield e=0.2 Adaptive procedure: N=, sample_count =0 While N >sample_count Choose a sample and count the number of inliers If inlier ratio is highest of any found so far, set e = 1 (number of inliers)/(total number of points) Recompute N from e: N p/ log1 e log 1 1 Increment the sample_count by 1 s Source: M. Pollefeys
83 RANSAC pros and cons Pros Simple and general Applicable to many different problems Often works well in practice Cons Computational time grows quickly with fraction of outliers and number of parameters Not as good for getting multiple fits (though one solution is to remove inliers after each fit and repeat) Sensitivity to threshold t
84 Slide Credits This set of sides contains contributions kindly made available by the following authors Derek Hoiem Svetlana Lazebnik Kristen Grauman Bastian Leibe David Lowe Marc Pollefeys Rahul Raguram Steve Seitz Noah Snavely
Fitting. Fitting. Slides S. Lazebnik Harris Corners Pkwy, Charlotte, NC
 Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
Model Fitting, RANSAC. Jana Kosecka
 Model Fitting, RANSAC Jana Kosecka Fitting: Overview If we know which points belong to the line, how do we find the optimal line parameters? Least squares What if there are outliers? Robust fitting, RANSAC
Model Fitting, RANSAC Jana Kosecka Fitting: Overview If we know which points belong to the line, how do we find the optimal line parameters? Least squares What if there are outliers? Robust fitting, RANSAC
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
10/03/11. Model Fitting. Computer Vision CS 143, Brown. James Hays. Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem
 10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
ECE Digital Image Processing and Introduction to Computer Vision
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Recap, SIFT Motion Tracking Change Detection Feature
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Recap, SIFT Motion Tracking Change Detection Feature
Fi#ng & Matching Region Representa3on Image Alignment, Op3cal Flow
 Fi#ng & Matching Region Representa3on Image Alignment, Op3cal Flow Lectures 5 & 6 Prof. Fergus Slides from: S. Lazebnik, S. Seitz, M. Pollefeys, A. Effros. Facebook 360 photos Panoramas How do we build
Fi#ng & Matching Region Representa3on Image Alignment, Op3cal Flow Lectures 5 & 6 Prof. Fergus Slides from: S. Lazebnik, S. Seitz, M. Pollefeys, A. Effros. Facebook 360 photos Panoramas How do we build
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
Lecture: RANSAC and feature detectors
 Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
EECS 442 Computer vision. Fitting methods
 EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Lecture 10 Detectors and descriptors
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Hough Transform and RANSAC
 CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM INTRODUCTION
 A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Key properties of local features
 Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Multi-modal Registration of Visual Data. Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy
 Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Lecture 9 Fitting and Matching
 Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Fitting. Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! EECS Fall 2014! Foundations of Computer Vision!
! web.eecs.umich.edu/~jjcorso/t/598f14!! EECS Fall 2014! Foundations of Computer Vision!") Fitting EECS 598-08 Fall 2014! Foundations of Computer Vision!! Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! Readings: FP 10; SZ 4.3, 5.1! Date: 10/8/14!! Materials on these
Fitting EECS 598-08 Fall 2014! Foundations of Computer Vision!! Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! Readings: FP 10; SZ 4.3, 5.1! Date: 10/8/14!! Materials on these
SIFT: Scale Invariant Feature Transform
 1 / 25 SIFT: Scale Invariant Feature Transform Ahmed Othman Systems Design Department University of Waterloo, Canada October, 23, 2012 2 / 25 1 SIFT Introduction Scale-space extrema detection Keypoint
1 / 25 SIFT: Scale Invariant Feature Transform Ahmed Othman Systems Design Department University of Waterloo, Canada October, 23, 2012 2 / 25 1 SIFT Introduction Scale-space extrema detection Keypoint
CS 556: Computer Vision. Lecture 3
 CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu Interest Points Harris corners Hessian points SIFT Difference-of-Gaussians SURF 2 Properties of Interest Points Locality
CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu Interest Points Harris corners Hessian points SIFT Difference-of-Gaussians SURF 2 Properties of Interest Points Locality
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Object Detection by Point Feature Matching using Matlab
 Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Wikipedia - Mysid
 Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Model Fitting. Introduction to Computer Vision CSE 152 Lecture 11
 Model Fitting CSE 152 Lecture 11 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 10: Grouping and Model Fitting What to do with edges? Segment linked edge chains into curve features (e.g.,
Model Fitting CSE 152 Lecture 11 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 10: Grouping and Model Fitting What to do with edges? Segment linked edge chains into curve features (e.g.,
Lecture 8 Fitting and Matching
 Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Scale Invariant Feature Transform by David Lowe
 Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Implementing the Scale Invariant Feature Transform(SIFT) Method
 Method") Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Ulas Bagci
 CAP5415- Computer Vision Lecture 5 and 6- Finding Features, Affine Invariance, SIFT Ulas Bagci bagci@ucf.edu 1 Outline Concept of Scale Pyramids Scale- space approaches briefly Scale invariant region selecqon
CAP5415- Computer Vision Lecture 5 and 6- Finding Features, Affine Invariance, SIFT Ulas Bagci bagci@ucf.edu 1 Outline Concept of Scale Pyramids Scale- space approaches briefly Scale invariant region selecqon
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Local Patch Descriptors
 Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
CS 556: Computer Vision. Lecture 3
 CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Outline Matlab Image features -- Interest points Point descriptors Homework 1 2 Basic MATLAB Commands 3 Basic MATLAB
CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Outline Matlab Image features -- Interest points Point descriptors Homework 1 2 Basic MATLAB Commands 3 Basic MATLAB
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Corner Detection. GV12/3072 Image Processing.
 Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi
 Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Image Features. Work on project 1. All is Vanity, by C. Allan Gilbert,
 Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
Implementation and Comparison of Feature Detection Methods in Image Mosaicing
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
TA Section 7 Problem Set 3. SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)
 Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)") TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching
 Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching Akshay Bhatia, Robert Laganière School of Information Technology and Engineering University of Ottawa
Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching Akshay Bhatia, Robert Laganière School of Information Technology and Engineering University of Ottawa
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Feature Detection and Matching
 and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
Scott Smith Advanced Image Processing March 15, Speeded-Up Robust Features SURF
 Scott Smith Advanced Image Processing March 15, 2011 Speeded-Up Robust Features SURF Overview Why SURF? How SURF works Feature detection Scale Space Rotational invariance Feature vectors SURF vs Sift Assumptions
Scott Smith Advanced Image Processing March 15, 2011 Speeded-Up Robust Features SURF Overview Why SURF? How SURF works Feature detection Scale Space Rotational invariance Feature vectors SURF vs Sift Assumptions
CS 664 Image Matching and Robust Fitting. Daniel Huttenlocher
 CS 664 Image Matching and Robust Fitting Daniel Huttenlocher Matching and Fitting Recognition and matching are closely related to fitting problems Parametric fitting can serve as more restricted domain
CS 664 Image Matching and Robust Fitting Daniel Huttenlocher Matching and Fitting Recognition and matching are closely related to fitting problems Parametric fitting can serve as more restricted domain
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Photo by Carl Warner
 Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Lecture 9: Hough Transform and Thresholding base Segmentation
 #1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
#1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
Bias-Variance Trade-off (cont d) + Image Representations
 + Image Representations") CS 275: Machine Learning Bias-Variance Trade-off (cont d) + Image Representations Prof. Adriana Kovashka University of Pittsburgh January 2, 26 Announcement Homework now due Feb. Generalization Training
CS 275: Machine Learning Bias-Variance Trade-off (cont d) + Image Representations Prof. Adriana Kovashka University of Pittsburgh January 2, 26 Announcement Homework now due Feb. Generalization Training
Lecture 6: Finding Features (part 1/2)
") Lecture 6: Finding Features (part 1/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Stanford Vision Lab 1 What we will learn today? Local invariant features MoOvaOon Requirements, invariances Keypoint
Lecture 6: Finding Features (part 1/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Stanford Vision Lab 1 What we will learn today? Local invariant features MoOvaOon Requirements, invariances Keypoint
Vision par ordinateur
 Epipolar geometry π Vision par ordinateur Underlying structure in set of matches for rigid scenes l T 1 l 2 C1 m1 l1 e1 M L2 L1 e2 Géométrie épipolaire Fundamental matrix (x rank 2 matrix) m2 C2 l2 Frédéric
Epipolar geometry π Vision par ordinateur Underlying structure in set of matches for rigid scenes l T 1 l 2 C1 m1 l1 e1 M L2 L1 e2 Géométrie épipolaire Fundamental matrix (x rank 2 matrix) m2 C2 l2 Frédéric
Comparison of Feature Detection and Matching Approaches: SIFT and SURF
 GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4
, Module 4") Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and