Local Image Features
|
|
|
- Elizabeth Griffin
- 6 years ago
- Views:
Transcription
1 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial


2 Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3 2. Define a region around each keypoint f A d( f A, f B ) < T B 1 B 2 f B K. Grauman, B. Leibe 3. Extract and normalize the region content 4. Compute a local descriptor from the normalized region 5. Match local descriptors
 local descriptor Local: robust to")
3 Why local features? LocalFeature=Interest Point =Keypoint=F eature Point = Distinguished Region = Covariant Region ( ) local descriptor Local: robust to occlusion/clutter Invariant: to scale/view/illumination changes Local feature can be discriminant 3 Slide credit: Liangliang Cao




4 4 Slide credit: B. Freeman and A. Torralba

5 Image/patch representations Templates Intensity, gradients, etc. Histograms Color, texture, SIFT descriptors, etc.
6 6 Slide credit: Liangliang Cao Development of Low-Level Image Features 1999 Classical features Raw pixel Histogram feature - Color histogram - Edge histogram Frequency analysis Image filters Texture features - LBP Scene features - GIST Shape descriptors Edge detection Corner detection Local Descriptors SIFT HOG SURF DAISY BRIEF DoG Hessian detector Laplacian of Harris FAST ORB
7 7 Slide credit: Liangliang Cao Concatenating Raw Pixels As 1D Vector Credit: The Face Research Lab
8 Pictures courtesy to Sam Roweis 8 Slide credit: Liangliang Cao Concatenated Raw Pixels Famous applications (widely used in ML field) Face recognition e recognition Hand-written digits nd written digits
9 Slide credit: K. Grauman Raw patches as local descriptors The simplest way to describe the neighborhood around an interest point is to write down the list of intensities to form a feature vector. But this is very sensitive to even small shifts, rotations.

10 Tiny Images Antonio Torralba et al. proposed to resize images to 32x32 color thumbnails, which are called ages tiny images Related applications - Scene recognition - Object recognition Fast speed with limited accuracy Torralba et al, MIT CSAIL report, 2007 Slide credit: Liangliang Cao 10

11 11 Slide credit: Liangliang Cao Problem of raw-pixel based representation -Rely heavily on good alignment -Assume the images are of similar scale -Suffer from occlusion -Recognition from different view point will be difficult We want more powerful features for realworld problems like the following

12 Image Representations: Histograms Images from Dave Kauchak Global histogram Represent distribution of features Space Shuttle Color, texture, depth, Cargo Bay


13 Image Representations: Histograms Histogram: Probability or count of data in each bin Images from Dave Kauchak Joint histogram Requires lots of data Loss of resolution to avoid empty bins Marginal histogram Requires independent features More data/bin than joint histogram
![[Swain and Ballard 91] 14 Slide credit: Liangliang Cao Color Histogram Each](/docs-images/78/77110840/images/14-2.jpg "pixel is described by a vector of pixel values Distribution of color vectors is")

14 [Swain and Ballard 91] 14 Slide credit: Liangliang Cao Color Histogram Each pixel is described by a vector of pixel values Distribution of color vectors is described by a histogram r g b Note: There are different choices for color space: RGB, HSV, Lab, etc. For gray images, we usually use 256 or fewer bins for histogram.


15 What kind of things do we compute histograms of? Color L*a*b* color space HSV color space Texture (filter banks or HOG over regions)


16 16 Slide credit: Liangliang Cao Benefits of Histogram Representations No longer sensitive to alignment, scale transform, or even global rotation Similar color histograms Similar color histograms (after normalization) ( ).




17 Limitation of Global Histogram Global histogram has no location information at all All of these images have the same color histogram 17 Slide credit: Ali Farhadi
18 Spatial pyramid representation Extension of a bag of features Locally orderless representation at several levels of resolution level 0 Lazebnik, Schmid & Ponce (CVPR 2006) Slide credit: Ali Farhadi

 Slide credit:")
19 Spatial pyramid representation Extension of a bag of features Locally orderless representation at several levels of resolution level 0 level 1 Lazebnik, Schmid & Ponce (CVPR 2006) Slide credit: Ali Farhadi
20 Spatial pyramid representation Extension of a bag of features Locally orderless representation at several levels of resolution level 0 level 1 level 2 Lazebnik, Schmid & Ponce (CVPR 2006) Slide credit: Ali Farhadi
21 General Histogram Representation Color histogram patch patch patch Extract color descriptor General histogram histogram accumulation patch patch patch Extract other descriptors edge histogram shape context histogram local binary patterns histogram accumulation 21 Slide credit: Liangliang Cao
22 Local Binary Pattern (LBP) For each pixel p, create an 8-bit number b1 b2 b3 b4 b5 b6 b7 b8, where bi = 0 if neighbor i has value less than or equal to p s value and 1 otherwise. Represent the texture in the image (or a region) by the histogram of these numbers Ojala et al, PR 96, PAMI 02 Ojala et al, PR 96, PAMI Slide credit: Liangliang Cao

23 LBP Histogram Divide the examined window to cells (e.g. 16x16 pixels for each cell). Compute the histogram, over the cell, of the frequency of each "number" occurring. Optionally normalize the histogram. Concatenate normalized histograms of all cells. 23 Slide credit: Liangliang Cao
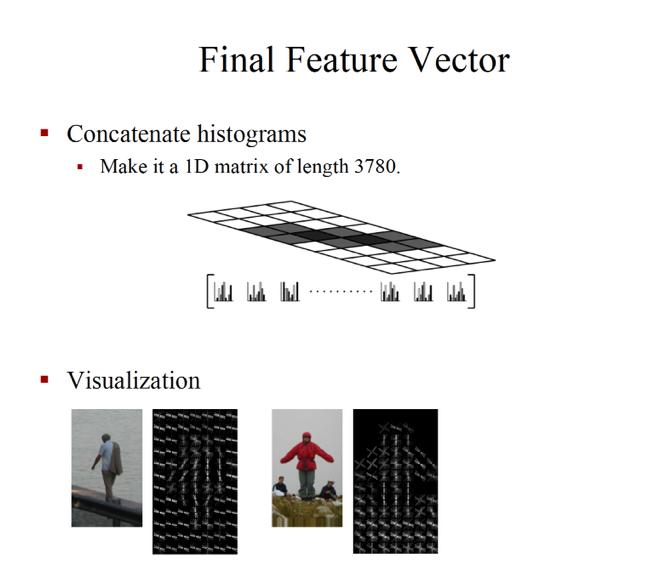
24 Steps Histogram of Oriented (HOG) descriptor Histograms of Oriented Gradients for Human Detection [N. Dalal and B. Triggs CVPR 2005] 24
25 25
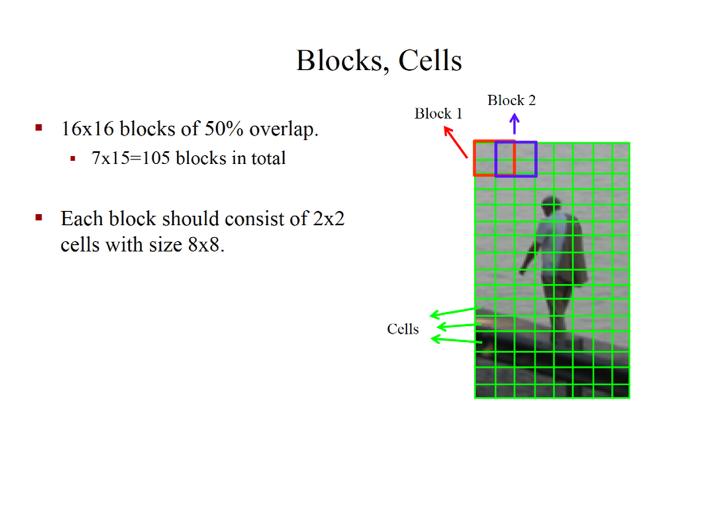
26 26
27 27
28 28


29 Slide credit: K. Grauman SIFT descriptor [Lowe 2004] Full version Divide the 16x16 window into a 4x4 grid of cells Compute an orientation histogram for each cell 16 cells * 8 orientations = 128 dimensional descriptor 0 2p Why subpatches? Why does SIFT have some illumination invariance?
30 SIFT descriptor Full version Divide the 16x16 window into a 4x4 grid of cells (2x2 case shown below) Compute an orientation histogram for each cell 16 cells * 8 orientations = 128 dimensional descriptor Threshold normalize the descriptor: such that: 0.2 Adapted from slide by David Lowe


31 Making descriptor rotation invariant CSE 576: Computer Vision Rotate patch according to its dominant gradient orientation This puts the patches into a canonical orientation. Image from Matthew Brown Slide credit: K. Grauman

 Fast and efficient can run in real time Lots of code available http://people.")
32 Slide credit: K. Grauman, S. Seitz SIFT properties Extraordinarily robust matching technique Can handle changes in viewpoint Up to about 60 degree out of plane rotation Can handle significant changes in illumination Sometimes even day vs. night (below) Fast and efficient can run in real time Lots of code available Known_implementations_of_SIFT
33 Slide credit: K. Grauman Example NASA Mars Rover images


34 Example NASA Mars Rover images with SIFT feature matches Figure by Noah Snavely Slide credit: K. Grauman

35 Example: Object Recognition SIFT is extremely powerful for object instance recognition, especially for well-textured objects Lowe, IJCV04

36 Example: Google Goggle
37 Slide credit: K. Grauman SIFT properties Invariant to Scale Rotation Partially invariant to Illumination changes Camera viewpoint Occlusion, clutter

38 38 Slide credit: R. Urtasun
39 SIFT Repeatability Lowe IJCV 2004
40 SIFT Repeatability



41 Recognition of specific objects, scenes Schmid and Mohr 1997 Sivic and Zisserman, 2003 Kristen Grauman Rothganger et al Lowe 2002


42 When does SIFT fail? Patches SIFT thought were the same but aren t:
43 Other methods: Daisy Circular gradient binning SIFT Daisy Picking the best DAISY, S. Winder, G. Hua, M. Brown, CVPR 09
 http://www.vision.ee.ethz.ch/~surf [Bay, ECCV 06], [Cornelis, CVGPU 08] K. Grauman, B.")
44 Local Descriptors: SURF (Speeded Up Robust Features) Fast approximation of SIFT idea Efficient computation by 2D box filters & integral images 6 times faster than SIFT Equivalent quality for object identification GPU implementation available Feature 200Hz (detector + descriptor, img) [Bay, ECCV 06], [Cornelis, CVGPU 08] K. Grauman, B. Leibe

45 Other methods: SURF For computational efficiency only compute gradient histogram with 4 bins: SURF: Speeded Up Robust Features Herbert Bay, Tinne Tuytelaars, and Luc Van Gool, ECCV 2006

46 Other methods: BRIEF Randomly sample pair of pixels a and b. 1 if a > b, else 0. Store binary vector. Daisy BRIEF: binary robust independent elementary features, Calonder, V Lepetit, C Strecha, ECCV 2010

47 Local Descriptors: Shape Context Count the number of points inside each bin, e.g.: Count = 4... Count = 10 Log-polar binning: more precision for nearby points, more flexibility for farther points. Belongie & Malik, ICCV 2001 K. Grauman, B. Leibe

48 Shape Context Descriptor
49 Shape Context Descriptor Now in order for a feature descriptor to be useful, it needs to have certain invariances. In particular it needs to be invariant to translation, scale, small perturbations, and depending on application rotation. Translational invariance come naturally to shape context. Scale invariance is obtained by normalizing all radial distances by the mean distance \alpha between all the point pairs in the shape [2][3] although the median distance can also be used.[1] [4] Shape contexts are empirically demonstrated to be robust to deformations, noise, and outliers[4] using synthetic point set matching experiments.[5] One can provide complete rotation invariance in shape contexts. One way is to measure angles at each point relative to the direction of the tangent at that point (since the points are chosen on edges). This results in a completely rotationally invariant descriptor. But of course this is not always desired since some local features lose their discriminative power if not measured relative to the same frame. Many applications in fact forbid rotation invariance e.g. distinguishing a "6" from a 9". [from WIKIPEDIA] 49

 Apply spatially varying blur and sub-sample")
50 Local Descriptors: Geometric Blur Compute edges at four orientations Extract a patch in each channel Example descriptor ~ (Idealized signal) Apply spatially varying blur and sub-sample Berg & Malik, CVPR 2001 K. Grauman, B. Leibe

51 Self-similarity Descriptor Matching Local Self-Similarities across Images and Videos, Shechtman and Irani, 2007

52 Self-similarity Descriptor Matching Local Self-Similarities across Images and Videos, Shechtman and Irani, 2007

53 Self-similarity Descriptor Matching Local Self-Similarities across Images and Videos, Shechtman and Irani, 2007
54 Learning Local Image Descriptors, Winder and Brown, 2007
55 Choosing a detector What do you want it for? Precise localization in x-y: Harris Good localization in scale: Difference of Gaussian Flexible region shape: MSER Best choice often application dependent Harris-/Hessian-Laplace/DoG work well for many natural categories MSER works well for buildings and printed things Why choose? Get more points with more detectors There have been extensive evaluations/comparisons [Mikolajczyk et al., IJCV 05, PAMI 05] All detectors/descriptors shown here work well
56 Comparison of Keypoint Detectors Tuytelaars Mikolajczyk 2008
57 Local Descriptors Most features can be thought of as templates, histograms (counts), or combinations The ideal descriptor should be Robust Distinctive Compact Efficient Most available descriptors focus on edge/ gradient information Capture texture information Color rarely used K. Grauman, B. Leibe


58 Things to remember Keypoint detection: repeatable and distinctive Corners, blobs, stable regions Harris, DoG Descriptors: robust and selective spatial histograms of orientation SIFT
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Click to edit title style
 Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local Patch Descriptors
 Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
Click to edit title style
 Class 3: Low-level Representation Liangliang Cao, Feb 6, 2014 EECS 6890 Topics in Information Processing Spring 2014, Columbia University http://rogerioferis.com/visualrecognitionandsearch2014 Visual Recognition
Class 3: Low-level Representation Liangliang Cao, Feb 6, 2014 EECS 6890 Topics in Information Processing Spring 2014, Columbia University http://rogerioferis.com/visualrecognitionandsearch2014 Visual Recognition
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Lecture 10 Detectors and descriptors
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications
 Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
Lecture 4.1 Feature descriptors. Trym Vegard Haavardsholm
 Lecture 4.1 Feature descriptors Trym Vegard Haavardsholm Feature descriptors Histogram of Gradients (HoG) descriptors Binary descriptors 2 Histogram of Gradients (HOG) descriptors Scale Invariant Feature
Lecture 4.1 Feature descriptors Trym Vegard Haavardsholm Feature descriptors Histogram of Gradients (HoG) descriptors Binary descriptors 2 Histogram of Gradients (HOG) descriptors Scale Invariant Feature
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Bias-Variance Trade-off (cont d) + Image Representations
 + Image Representations") CS 275: Machine Learning Bias-Variance Trade-off (cont d) + Image Representations Prof. Adriana Kovashka University of Pittsburgh January 2, 26 Announcement Homework now due Feb. Generalization Training
CS 275: Machine Learning Bias-Variance Trade-off (cont d) + Image Representations Prof. Adriana Kovashka University of Pittsburgh January 2, 26 Announcement Homework now due Feb. Generalization Training
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
ECE Digital Image Processing and Introduction to Computer Vision
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Recap, SIFT Motion Tracking Change Detection Feature
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Recap, SIFT Motion Tracking Change Detection Feature
Image matching. Announcements. Harder case. Even harder case. Project 1 Out today Help session at the end of class. by Diva Sian.
 Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Image Features: Detection, Description, and Matching and their Applications
 Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Image Features. Work on project 1. All is Vanity, by C. Allan Gilbert,
 Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Visual Object Recognition
 Visual Object Recognition Lecture 3: Descriptors Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University 2015 2014 Per-Erik Forssén Lecture 3: Descriptors
Visual Object Recognition Lecture 3: Descriptors Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University 2015 2014 Per-Erik Forssén Lecture 3: Descriptors
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
Today. Main questions 10/30/2008. Bag of words models. Last time: Local invariant features. Harris corner detector: rotation invariant detection
 Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Prof. Feng Liu. Spring /26/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
VK Multimedia Information Systems
 VK Multimedia Information Systems Mathias Lux, mlux@itec.uni-klu.ac.at Dienstags, 16.oo Uhr This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Agenda Evaluations
VK Multimedia Information Systems Mathias Lux, mlux@itec.uni-klu.ac.at Dienstags, 16.oo Uhr This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Agenda Evaluations
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Previous Lecture - Coded aperture photography
 Previous Lecture - Coded aperture photography Depth from a single image based on the amount of blur Estimate the amount of blur using and recover a sharp image by deconvolution with a sparse gradient prior.
Previous Lecture - Coded aperture photography Depth from a single image based on the amount of blur Estimate the amount of blur using and recover a sharp image by deconvolution with a sparse gradient prior.
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES
 IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
State-of-the-Art: Transformation Invariant Descriptors. Asha S, Sreeraj M
 International Journal of Scientific & Engineering Research, Volume 4, Issue ş, 2013 1994 State-of-the-Art: Transformation Invariant Descriptors Asha S, Sreeraj M Abstract As the popularity of digital videos
International Journal of Scientific & Engineering Research, Volume 4, Issue ş, 2013 1994 State-of-the-Art: Transformation Invariant Descriptors Asha S, Sreeraj M Abstract As the popularity of digital videos
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Wikipedia - Mysid
 Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Lecture: RANSAC and feature detectors
 Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
TA Section 7 Problem Set 3. SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)
 Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)") TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
By Suren Manvelyan,
 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Implementation and Comparison of Feature Detection Methods in Image Mosaicing
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
Multi-modal Registration of Visual Data. Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy
 Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Lecture 6: Finding Features (part 1/2)
") Lecture 6: Finding Features (part 1/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Stanford Vision Lab 1 What we will learn today? Local invariant features MoOvaOon Requirements, invariances Keypoint
Lecture 6: Finding Features (part 1/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Stanford Vision Lab 1 What we will learn today? Local invariant features MoOvaOon Requirements, invariances Keypoint
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
Comparing Local Feature Descriptors in plsa-based Image Models
 Comparing Local Feature Descriptors in plsa-based Image Models Eva Hörster 1,ThomasGreif 1, Rainer Lienhart 1, and Malcolm Slaney 2 1 Multimedia Computing Lab, University of Augsburg, Germany {hoerster,lienhart}@informatik.uni-augsburg.de
Comparing Local Feature Descriptors in plsa-based Image Models Eva Hörster 1,ThomasGreif 1, Rainer Lienhart 1, and Malcolm Slaney 2 1 Multimedia Computing Lab, University of Augsburg, Germany {hoerster,lienhart}@informatik.uni-augsburg.de
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Image Matching Using SIFT, SURF, BRIEF and ORB: Performance Comparison for Distorted Images
 Image Matching Using SIFT, SURF, BRIEF and ORB: Performance Comparison for Distorted Images Ebrahim Karami, Siva Prasad, and Mohamed Shehata Faculty of Engineering and Applied Sciences, Memorial University,
Image Matching Using SIFT, SURF, BRIEF and ORB: Performance Comparison for Distorted Images Ebrahim Karami, Siva Prasad, and Mohamed Shehata Faculty of Engineering and Applied Sciences, Memorial University,
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
CS 1674: Intro to Computer Vision. Midterm Review. Prof. Adriana Kovashka University of Pittsburgh October 10, 2016
 CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS
 8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING - 19-21 April 2012, Tallinn, Estonia LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS Shvarts, D. & Tamre, M. Abstract: The
8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING - 19-21 April 2012, Tallinn, Estonia LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS Shvarts, D. & Tamre, M. Abstract: The
Fast Image Matching Using Multi-level Texture Descriptor
 Fast Image Matching Using Multi-level Texture Descriptor Hui-Fuang Ng *, Chih-Yang Lin #, and Tatenda Muindisi * Department of Computer Science, Universiti Tunku Abdul Rahman, Malaysia. E-mail: nghf@utar.edu.my
Fast Image Matching Using Multi-level Texture Descriptor Hui-Fuang Ng *, Chih-Yang Lin #, and Tatenda Muindisi * Department of Computer Science, Universiti Tunku Abdul Rahman, Malaysia. E-mail: nghf@utar.edu.my
Evaluation of GIST descriptors for web scale image search
 Evaluation of GIST descriptors for web scale image search Matthijs Douze Hervé Jégou, Harsimrat Sandhawalia, Laurent Amsaleg and Cordelia Schmid INRIA Grenoble, France July 9, 2009 Evaluation of GIST for
Evaluation of GIST descriptors for web scale image search Matthijs Douze Hervé Jégou, Harsimrat Sandhawalia, Laurent Amsaleg and Cordelia Schmid INRIA Grenoble, France July 9, 2009 Evaluation of GIST for
A Novel Extreme Point Selection Algorithm in SIFT
 A Novel Extreme Point Selection Algorithm in SIFT Ding Zuchun School of Electronic and Communication, South China University of Technolog Guangzhou, China zucding@gmail.com Abstract. This paper proposes
A Novel Extreme Point Selection Algorithm in SIFT Ding Zuchun School of Electronic and Communication, South China University of Technolog Guangzhou, China zucding@gmail.com Abstract. This paper proposes
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Visual words. Map high-dimensional descriptors to tokens/words by quantizing the feature space.
 Visual words Map high-dimensional descriptors to tokens/words by quantizing the feature space. Quantize via clustering; cluster centers are the visual words Word #2 Descriptor feature space Assign word
Visual words Map high-dimensional descriptors to tokens/words by quantizing the feature space. Quantize via clustering; cluster centers are the visual words Word #2 Descriptor feature space Assign word
Comparison of Feature Detection and Matching Approaches: SIFT and SURF
 GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
A Comparison of SIFT, PCA-SIFT and SURF
 A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Lecture 14: Indexing with local features. Thursday, Nov 1 Prof. Kristen Grauman. Outline
 Lecture 14: Indexing with local features Thursday, Nov 1 Prof. Kristen Grauman Outline Last time: local invariant features, scale invariant detection Applications, including stereo Indexing with invariant
Lecture 14: Indexing with local features Thursday, Nov 1 Prof. Kristen Grauman Outline Last time: local invariant features, scale invariant detection Applications, including stereo Indexing with invariant
Evaluation of image features using a photorealistic virtual world
 Evaluation of image features using a photorealistic virtual world The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published
Evaluation of image features using a photorealistic virtual world The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published
Local Intensity Order Pattern for Feature Description
 Local Intensity Order Pattern for Feature Description Zhenhua Wang Bin Fan Fuchao Wu National Laboratory of Pattern Recognition, Institute of Automation Chinese Academy of Sciences, 9, Beijing, China {wzh,bfan,fcwu}@nlpr.ia.ac.cn
Local Intensity Order Pattern for Feature Description Zhenhua Wang Bin Fan Fuchao Wu National Laboratory of Pattern Recognition, Institute of Automation Chinese Academy of Sciences, 9, Beijing, China {wzh,bfan,fcwu}@nlpr.ia.ac.cn
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Fuzzy based Multiple Dictionary Bag of Words for Image Classification
 Available online at www.sciencedirect.com Procedia Engineering 38 (2012 ) 2196 2206 International Conference on Modeling Optimisation and Computing Fuzzy based Multiple Dictionary Bag of Words for Image
Available online at www.sciencedirect.com Procedia Engineering 38 (2012 ) 2196 2206 International Conference on Modeling Optimisation and Computing Fuzzy based Multiple Dictionary Bag of Words for Image
Keypoint-based Recognition and Object Search
 03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so