IMA Preprint Series # 2171
|
|
|
- Constance Small
- 6 years ago
- Views:
Transcription

1 A GEODESIC FRAMEWORK FOR FAST INTERACTIVE IMAGE AND VIDEO SEGMENTATION AND MATTING By Xue Bai and Guillermo Sapiro IMA Preprint Series # 2171 ( August 2007 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS UNIVERSITY OF MINNESOTA 400 Lind Hall 207 Church Street S.E. Minneapolis, Minnesota Phone: Fax: URL:
2 A Geodesic Framework for Fast Interactive Image and Video Segmentation and Matting Xue Bai and Guillermo Sapiro University of Minnesota, Minneapolis, MN 55455, Abstract An interactive framework for soft segmentation and matting of natural images and videos is presented in this paper. The proposed technique is based on the optimal, linear time, computation of weighted geodesic distances to the user-provided scribbles, from which the whole data is automatically segmented. The weights are based on spatial and/or temporal gradients, without explicit optical flow or any advanced and often computationally expensive feature detectors. These could be naturally added to the proposed framework as well if desired, in the form of weights in the geodesic distances. A localized refinement step follows this fast segmentation in order to accurately compute the corresponding matte function. Additional constraints into the distance definition permit to efficiently handle occlusions such as people or objects crossing each other in a video sequence. The presentation of the framework is complemented with numerous and diverse examples, including extraction of moving foreground from dynamic background, and comparisons with the recent literature. 1. Introduction The segmentation of natural images and videos is one of the most fundamental and challenging problems in image processing. One of its applications is to extract the foreground object (or object of interest) out of the cluttered background, and, for example composite it onto a new background without visual artifacts (see also [4] for additional applications in video). For complex images, as well as subjective applications, there can be more than one interpretation of the foreground or objects of interest (in absence of higher level knowledge), thus making the task ill-posed and ambiguous. It is often imperative then to incorporate some user intervention, which encodes prior information, into the process. Specifically, the user can draw rough scribbles labeling the regions of interest and then the image/video is automatically segmented. The user is allowed to add more Work supported by ONR, NGA, NSF, DARPA, and ARO. scribbles to achieve the ideal result, although of course, the goal is to minimize as much as possible the user effort. Closely connected to the segmentation of objects of interest, image and video matting refers to the process of reconstructing the foreground/background components and the alpha value (transparency) of each pixel. This is important for applications such as extracting hair strands or blurry edges, as well as for compositing. Being inherently under-constrained (solving for three components, F (foreground), B (background), and α transparency, with only the observed color), the matting problem also requires priors, such as user interactions, which could be in the form of scribbles as in the segmentation task, or a complete trimap. In this paper, we propose a fast weighted-distance-based technique for image and video segmentation and matting from very few and roughly placed user scribbles (often just one scribble for the foreground and one for the background). The distance (geodesic) computation is linear in time, and thereby optimal (with minimal memory requirements as well). The weights are based on simple properties such as spatial and temporal gradients, while more sophisticated features can be naturally included as well. The proposed framework can handle diverse data, including dynamic background, moving cameras, and objects crossing each other in the video. Following a brief literature review, Section 2, we describe the framework for segmenting and matting still images, Section 3. Examples and comparison with the literature are presented in this section as well. Then, we extend it to video applications, where a long video can be processed with little user interaction, Section 4. We explain how to add constraints to the distance computation to handle moving objects occluding each other, e.g., people/objects crossing each other. We illustrate our method with additional video examples in Section 5, and conclude and discuss future research in Section 6. Before proceeding, let us explicitly present the key attributes of the proposed framework: 1. It is based on weighted distance functions (geodesics), thereby solving a first order geometric Hamilton-Jacobi equation in computationally optimal linear time. This makes the proposed framework natural for user-interactive 1
3 processing of images and videos. 2. It produces very good, state-of-the-art results, with very few user provide scribbles and very simple attributes defining the weights in the distance computation. We often use just a couple of rough scribbles for still images (one for the foreground and one for the background) and scribble one frame every 70 or so for videos. 3. It applies to a large class of natural data, and since it avoids off-line learning, it is not limited to pre-observed and classified classes and to the availability of ground-truth and hand segmented data. 4. It can handle dynamic background in video as well as crossing objects of interest. 5. The framework is general so that additional attributes can be naturally included in the weights for the geodesic distances if so required for a particular type of data. 2. Related work One important class of related works is based on energy formulations which are minimized via discrete optimization techniques. The pioneering graph cuts technique, [5], addresses the foreground/background interactive segmentation in still images via max-flow/min-cut energy minimization. The energy balances between the probability of pixels belonging to the foreground (likelihood) and the edge contrast, imposing regularization. The user-provided scribbles collect statistical information on pixels and also serve as hard constraints. The Grabcut algorithm, [14], further simplifies the user interaction. Scribbles can be interactively added to improve the initial segmentation. Full color statistics are used, modeled as mixtures of Gaussians (here, in contrast, we use fast kernel density estimation), and these are updated as the segmentation progresses. This can help but also hurt by propagating segmentation errors. Very good and fast results were demonstrated with this technique. A number of methods have been proposed extending this framework, aiming at devising more sophisticated energy formulations and at extending it to higher dimensions (video). The Bilayer approach, [8], segments videos with basically static background. It incorporates an additional second order temporal transition prior term and a motion likelihood term. Each frame is segmented via graph cuts, conditionally dependent on the previous two frames. Although excellent results are reported for a particular type of videos, this method makes assumptions about the different behaviors of foreground and background pixels and deals with videos with mostly static backgrounds (they do permit a moving object in the background as long as it is different enough from the foreground). Moreover, it needs to learn the motion statistics, which is very useful as they have cleverly incorporated in their system, but requires the availability of pre-segmented ground-truth training data and of video classes (to train and apply with videos having the same type of motion). Interactive video cutout, [18], presents a system where the user draws scribbles in 3D space. A hierarchical meanshift preprocess is employed to cluster pixels into supernodes, which greatly reduces the computation of the mincut problem. In [9], the author uses random walks for soft image segmentation. Each pixel is assigned the label with maximal probability that a random walker reaches it when starting from the corresponding scribbles. The authors of [20] propose an MRF framework to solve segmentation and matting simultaneously. The basic idea is to minimize the fitting error of the matte while maintaining its smoothness. The uncertainties (0 for the scribbles and 1 for all unknown pixels) are propagated to the rest of the image using belief propagation. Once the alpha values are found, the F and B components are estimated. In [12], a local linear relation between the alpha values and image intensities is assumed, that is, the pixel s alpha value can be immediately determined in a local region if its intensity is known. The matting problem is solved by minimizing a cost function combining the prediction error, the regularization of alpha values, and the user-supplied scribbles which indicate constraints to the optimization problem. Poisson matting, [15], and Bayesian matting, [7], are two important matting techniques that use trimaps as inputs. Poisson matting computes the alpha matte by solving the second order Poisson equation with Dirichlet boundary conditions. 1 An assumption is made by neglecting the gradients of F and B, considering the matte gradient proportional to the image gradient. Additional operations are performed to adjust to local regions. Bayesian matting simultaneously estimates F, B, and α by maximizing a posterior probability. For each pixel in the trimaps region, it models the known F and B colors around as mixture of oriented Gaussians in color space (again, we use fast kernel densities instead). An (F, B, α) triplet is computed as the one that most probably generates the observed color of that pixel. This technique is applied to videos in [6], where the trimap is temporally propagated using optical flow and the matte is pulled out individually in each frame by the Bayesian matting algorithm. Explicit optical flow is not used in our method, although it could be incorporated as part of the weights in the geodesic computation. After this paper was submitted for publication, a few additional matting techniques have been published. The spectral matting technique, [10], automatically computes a set of soft matting components via a linear transformation of the smallest eigenvectors of the matting Laplacian matrix [12]. These components are then selected and grouped into semantically reasonable mattes either in an unsupervised or supervised fashion. The main drawback of this algorithm 1 Note that in contrast with this, we solve a first order Hamilton-Jacobi equation, which is computationally more efficient.

![The authors in [17] implemented an interface for interactive realtime matting. The user roughly tracks the boundary with a self-adjustable brush.](/docs-images/80/81438095/images/4-1.jpg "Like in [19], the matte is pulled out in local regions, solving a soft graph-labeling problem.")
![Flash cut, [16], extracts the foreground layers of flash/no-flash image pairs, using the prior information that only the foreground is significantly brightened.](/docs-images/80/81438095/images/4-2.jpg "This information is incorporated in an graph cut energy framework. The segmentation algorithm is shown to tolerate some amount of foreground motion and camera shake.")
![Our work is inspired by [23], where the authors, following [11], show how to use distance functions for image colorization.](/docs-images/80/81438095/images/4-3.jpg "As here, these distances are optimally computed in linear time [22]. This was then extended in [13] for segmentation.")
. (a) (b) (c) (d) (e) (f) Figure 2.")
 Automatically generated trimap, a narrow band around the white curve, and new automatically generated local scribbles (borders of the band).")
 DB (x). Blue indicates low distances and red high distances. classify the pixels, labeling them F or B.")


 where 1 W C s1,s2 (p) dp, d(s1, s2 ) := min Figure 1. Figures (a)-(d) show the user inputs and results from [13].")
 0 where Cs1,s2 (p) is a path connecting the pixels s1, s2 (for p = 0 and p = 1 respectively).")
4 is its high computational cost it takes several minutes to compute the matting components for small sized images. In addition, it is not intuitive where to place the constraints. The authors of [19] proposed an improved color sampling method for natural image matting, and demonstrated very good performance. The authors in [17] implemented an interface for interactive realtime matting. The user roughly tracks the boundary with a self-adjustable brush. Like in [19], the matte is pulled out in local regions, solving a soft graph-labeling problem. Flash cut, [16], extracts the foreground layers of flash/no-flash image pairs, using the prior information that only the foreground is significantly brightened. This information is incorporated in an graph cut energy framework. The segmentation algorithm is shown to tolerate some amount of foreground motion and camera shake. Our work is inspired by [23], where the authors, following [11], show how to use distance functions for image colorization. As here, these distances are optimally computed in linear time [22]. This was then extended in [13] for segmentation. In contrast with this work, we use significantly less scribbles per image (thanks in part to a more efficient modeling of the corresponding probability distribution functions), see Figure 1, extend the work to video, and also produce explicit mattes (F, B, and α). (a) (b) (c) (d) (e) (f) Figure 2. (a) A hard segmentation (white curve) is quickly found by a few scribbles. (b) Automatically generated trimap, a narrow band around the white curve, and new automatically generated local scribbles (borders of the band). (c) Obtained segmentation and alpha matting. (d) PF (x). Dark indicates low probabilities and white high probabilities. (Note that this is not the final alpha matte.) (e) DF (x). (f) DB (x). Blue indicates low distances and red high distances. classify the pixels, labeling them F or B. The geodesic distance d(x) is simply the smallest integral of a weight function over all paths from the scribbles to x. Specifically, let ΩF be the set of pixels with label/scribble F and ΩB those corresponding to the background scribble B. The weighted distance (geodesic) from each of the two scribbles for every pixel x is then computed as Dl (x) = min d(s, x), s Ωl (a) (b) (c) (d) Z Cs1,s2 (e) (f) (g) (h) 3. General framework: Still images As discussed in the introduction, our algorithm starts from two types of user-provided scribbles, F for foreground and B for background, roughly placed across the main regions of interest. Now the problem is how to learn from them and propagate this prior information/labeling to the entire image. We use the geodesic distance from these scribbles to (1) where 1 W C s1,s2 (p) dp, d(s1, s2 ) := min Figure 1. Figures (a)-(d) show the user inputs and results from [13]. Figures (e)-(h) correspond to the new inputs and results for the same images, leading to better results with less scribbles. l {F, B}, (2) 0 where Cs1,s2 (p) is a path connecting the pixels s1, s2 (for p = 0 and p = 1 respectively). The weights W are set to the gradient of the likelihood that a pixel belongs to the foreground (resp. background), i.e., W = PF (x). This likelihood is obtained from the samples on the provided scribbles P r(x F ) in Luv color space, i.e., PF (x) = P r(x F )+P r(x B), where P r(x F) is the color PDF of ΩF, obtained via the fast kernel density estimation ([21]) (same process for the background PDF). A pixel is close in this metric to a scribble in the sense that there exists a path along which the likelihood function does not change much, Figure 2(d). Following [22], we can efficiently compute the distances, in optimal linear time, and assign each pixel to the label with the shorter distance. The user can progressively add new scribbles to achieve the desired result, although often a single scribble for the foreground and one for the background (regardless of how cluttered it is), is sufficient. If a refinement step is needed, a narrow band is spanned across the

 is locally recomputed using the feature vector (L, u, v, τ ), τ [0, 1] parameterizes the band along the boundary (leading to local PDF estimations), and is periodic with period 1")
 and the probability based on the fast kernel density estimation (measuring how")

![After the matte α is computed, we follow the method in [20] to estimate the Fx and Bx components (in Luv space) for each pixel x inside the band.](/docs-images/80/81438095/images/5-4.jpg "We randomly sample the foreground and background colors in the neighborhood of x and use the pair that gives the minimal fitting error: (Fx, Bx ) = arg min kfi αx + Bj (1 αx ) Ix k,")



![[10] (note how our proposed approach needs significantly less scribbles). Figure 3. Left column: original images with user-provided scribbles.](/docs-images/80/81438095/images/5-8.jpg "Blue for foreground and green for background. Middle column: Computed alpha matte.")
. 4.")
. The scribbles, drawn on one or several frames, propagate throughout the whole video by weighted distances in spatio-temporal space.")
5 current boundaries (see Figure 2(b)), and its borders serve as new F and B scribbles, thereby reducing the computational cost just to a few pixels in the band, while at the same time refining the likelihood functions and locally adapting them to the region of interest. Once this distance has been obtained, the alpha channel inside the band is explicitly computed as ωl (x) = Dl (x) r Pl (x), α(x) = l {F, B}, ωf (x), ωf (x) + ωb (x) (3) (4) where Pl (x) is locally recomputed using the feature vector (L, u, v, τ ), τ [0, 1] parameterizes the band along the boundary (leading to local PDF estimations), and is periodic with period 1 if the curve is closed (see Figure 2(b)). r controls the smoothness of the edges. When r = 0, α(x) = PF (x); when r, α(x) becomes hard segmentation (typically 0 r 2 in our examples). This alpha matte combines the weighted distance (measuring how close the pixel is to the scribble) and the probability based on the fast kernel density estimation (measuring how probable is its color). Note that regularization, e,g, anisotropic diffusion of α, can be applied inside the band as well if needed. Since this is done locally, virtually no computational cost is added. After the matte α is computed, we follow the method in [20] to estimate the Fx and Bx components (in Luv space) for each pixel x inside the band. We randomly sample the foreground and background colors in the neighborhood of x and use the pair that gives the minimal fitting error: (Fx, Bx ) = arg min kfi αx + Bj (1 αx ) Ix k, Fi,Bj (5) where i N (x) ΩF, j N (x) ΩB, Fi, Bj are foreground and background colors sampled on the (band boundary) scribbles within the window N (x) centered at x, and Ix is the observed color. With these components, we can now paste the object onto a new background if desired, with no noticeable visual artifacts by the simple matting equation Cx = Fx αx + Bx (1 αx ), where the composite color Cx is a linear combination of foreground color Fx and the new background color Bx for every pixel x in the image. Figure 3 shows our results for still images. Note how simple scribbles can handle cluttered and diverse images. Figure 4 presents comparisons with the work in [20], Photoshop Extract Filter [1], Photoshop CS3 Quick Selection & Refine Edge tools [3], Corel Knockout2 [2], and Spectral Matting [10] (note how our proposed approach needs significantly less scribbles). Figure 3. Left column: original images with user-provided scribbles. Blue for foreground and green for background. Middle column: Computed alpha matte. Right column: Foregrounds pasted on blue backgrounds (blue (constant) backgrounds are selected since they often permit much more careful inspection of the results than pasting on cluttered backgrounds). 4. Interactive video segmentation and matting The above described framework is now extended to videos, modeled as 3D images, in which every pixel has six neighbors, four spatial and two temporal (except the ones on the frame borders). The scribbles, drawn on one or several frames, propagate throughout the whole video by weighted distances in spatio-temporal space. In particular, spatial and temporal gradients of the likelihood function are used to define the weight W in the geodesic computation in Equation (2). Note that there is no explicit use of optical flow in the framework (or motion models as in the works described in Section 2), thereby not only simplifying the computations but also permitting to deal with dynamic background and not limiting the work to pre-specified motion classes. As we will see in the experimental section, this simple model is already very useful for numerous scenarios. We now introduce some additional extensions to make it more general Constrained spatio-temporal distance In still images, a single F scribble and a single B scribble always return two connected components. This can be easily proved by the triangle inequality property of the distance function (this also helps to prove the robustness of the
 with [20] (first two rows, second column), Photoshop Extract Filter [1] (first two rows, third column), Photoshop CS3 Quick Selection & Refine")
![Edge tools [3] (last two rows, first column), Corel Knockout2 [2] (last two rows, second column), and Spectral Matting [10] (last two rows, last column). The first and third rows are the user inputs.](/docs-images/80/81438095/images/6-1.jpg "The second and last rows are the corresponding results on blue background. ([1] and [2] require complete trimaps.) method with respect to the exact placement of the scribbles, see [23]).")

.")
. This phenomenon happens when undesired objects in the background touch the foreground in a certain frame, and the error spreads temporally throughout all frames.")
 is replaced by: Z 1 d(s1, s2 ) := min W")
![dp, s.t. t1 t2 if p1 p2, Cs1,s2 0 (6) where p1, p2 [0, 1] indicate any two positions on Cs1,s2 (p) and t1, t2 are their corresponding time coordinates.](/docs-images/80/81438095/images/6-7.jpg "In other words, d(s1, s2 ) is minimized among the paths that temporally go forwards. Of course we can also constrain the distance function in the opposite direction.")

6 Figure 4. Comparison of our results (first two rows, first column) with [20] (first two rows, second column), Photoshop Extract Filter [1] (first two rows, third column), Photoshop CS3 Quick Selection & Refine Edge tools [3] (last two rows, first column), Corel Knockout2 [2] (last two rows, second column), and Spectral Matting [10] (last two rows, last column). The first and third rows are the user inputs. The second and last rows are the corresponding results on blue background. ([1] and [2] require complete trimaps.) method with respect to the exact placement of the scribbles, see [23]). If the user marks a circle of B scribble around the object, all the exterior region will be classified as background. However, this is no longer guaranteed in the 3D spatio-temporal case. Consider the simple scenario in Figure 5. Two objects with similar color/feature distributions move towards each other, cross, and split apart. The inside of the tube has low distances to the F scribble (shown in red). The F scribble in object A propagates to the frames with occlusions, and then backwards to object B (B refers now to the second object in Figure 5 and not to the background value). Although the user might intend to separate object A as foreground in the initial frame, object B is mistakenly cut out because of the connectivity in 3D space (such connectivity doesn t occur in still images). This phenomenon happens when undesired objects in the background touch the foreground in a certain frame, and the error spreads temporally throughout all frames. We address this problem with very limited extra computation. To eliminate the branch formed by the undesired object before occlusion, we simply constrain the propagation to be temporally non-decreasing, and Equation (2) is replaced by: Z 1 d(s1, s2 ) := min W dp, s.t. t1 t2 if p1 p2, Cs1,s2 0 (6) where p1, p2 [0, 1] indicate any two positions on Cs1,s2 (p) and t1, t2 are their corresponding time coordinates. In other words, d(s1, s2 ) is minimized among the paths that temporally go forwards. Of course we can also constrain the distance function in the opposite direction. However, it becomes the same definition if we let the video play reversely. In the discrete scenario, the temporal links (the links that connect temporal neighbors) are replaced by directed links, i.e., the weight of going backwards in time is set to be infinity. This simple modification leads to the correct segmentation before the occlusion, but confusion might still exists after the occlusion (Figure 5(c)). We can further remove the wrong branch using the same approach, but now in the opposite direction. This can be done by specifying a point in the desired tube at a latter time, letting it propagate backwards within the tubes, constrained to move only backwards. Figure 5 illustrates the process. As a result, the ambiguity is removed in frames where the objects are disconnected within the frame. Figure 6 shows the example of two people walking. The user desired to segment the person initially on the right. The two people are merged as a single object when they cross each other (since they share the features that are used to compute the weighted distance). The second column shows the results using the distance function without the constraint. The wrong segment appears in every frame (again, see Figure 5(a)). The third column shows the result by the constrained distance function. We can see that the error is removed before and after the intersection. Adding scribbles in the intersection frames will manage to separate them also there, see below, but this is left without in this figure to illustrate the power of the tubing effect just described Interactive refinement For individual frames where occlusion actually happens and can not be fixed by the tubing approach described above, the user simply provides extra scribbles to segment the object. Since the color distribution might be inadequate to differentiate the objects (this is what led to their merge in the first case), we switch to another contrast sensitive weight to be used for the geodesic distance computation in Equation (2). This shows the power of the framework, features can be adapted to the problem at hand. For discrete images, the new feature is defined as Wpq :=k Ip Iq k, where p and q are two adjacent pixels and I is the color vector in Luv space. Figure 7 shows how the user separates the two persons using the new weights. 5. Additional video experimental results We test our algorithm on three videos of 71, 79 and 78 frames respectively. We mark scribbles on two frames for
 Although the scribbles in the first frame intend to separate A, the F scribble (red) reaches the object B by a path in 3D space where both objects A and B")
 Result with the proper separation of the object A. (d) the video in Figure 8 and just a single frame for videos in figures 9 and 10.")
. The columns correspond to the original frames, alpha matte, composites on a white background, and composites on a new movie.")
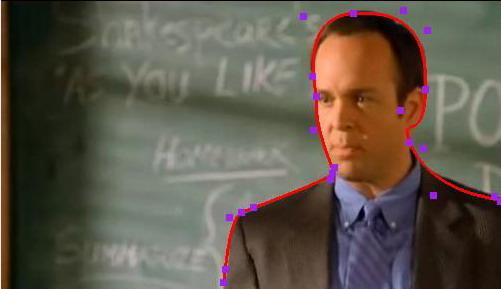
![Finally, we compare our approach with the rotoscoping algorithm in [4] for the video in Figure 8 (we only refer to the segmentation/tracking part, which is the contribution of our paper, and not the](/docs-images/80/81438095/images/7-5.jpg "very nice special effects they show after the segmentation is obtained). Our approach has a number of advantages over this work: (a) We need significantly less user interaction.")
![In [4] the user basically needs to draw the boundaries for all keyframes by hand (about every 10 frames for this video), while our method only requires very few rough scribbles, see Figure 8.](/docs-images/80/81438095/images/7-6.jpg "(b) We explicitly compute the alpha matte, while [4] gives spline approximations of the detected boundaries (explicit computation of the matte was not in the original goals of [4] for their")
![applications). (c) Our method can adapt to a wide variety of motions while the algorithm in [4] easily loses track of the object, especially when part of the object moves out of the Figure 6.](/docs-images/80/81438095/images/7-7.jpg "A video example of two people crossing. Left column: original video. Scribbles drawn on the first frame. Middle column: Segmented results using unconstrained distance function.")
7 (a) (b) (c) Figure 5. Tubes in 3D space, where t 1 < t 2 < t 3 (a) Although the scribbles in the first frame intend to separate A, the F scribble (red) reaches the object B by a path in 3D space where both objects A and B overlap. (b) The scribble propagation is constrained to move forward and the branch between t 1 and t 2 is eliminated. (c) The user specifies a pixel in A at t 3 and lets it propagate backwards. The branch of B between t 2 and t 3 is removed. (d) Result with the proper separation of the object A. (d) the video in Figure 8 and just a single frame for videos in figures 9 and 10. The results are shown in figures 8, 9 and 10 as image sequences sampled every few frames (please see the videos uploaded with the supplementary material to appreciate the moving camera and dynamic background). The columns correspond to the original frames, alpha matte, composites on a white background, and composites on a new movie. Finally, we compare our approach with the rotoscoping algorithm in [4] for the video in Figure 8 (we only refer to the segmentation/tracking part, which is the contribution of our paper, and not the very nice special effects they show after the segmentation is obtained). Our approach has a number of advantages over this work: (a) We need significantly less user interaction. In [4] the user basically needs to draw the boundaries for all keyframes by hand (about every 10 frames for this video), while our method only requires very few rough scribbles, see Figure 8. (b) We explicitly compute the alpha matte, while [4] gives spline approximations of the detected boundaries (explicit computation of the matte was not in the original goals of [4] for their applications). (c) Our method can adapt to a wide variety of motions while the algorithm in [4] easily loses track of the object, especially when part of the object moves out of the Figure 6. A video example of two people crossing. Left column: original video. Scribbles drawn on the first frame. Middle column: Segmented results using unconstrained distance function. Right column: Segmented results using constrained distance function. See text for details. (a) (b) (c) Figure 7. (a) Original segmentation obtained by gradients of the PDF. (b) The user adds new scribbles. (c) Segmentation results obtained with the new geodesic distance. frame, requiring further user intervention. To better illustrate the comparison, we generate the boundaries by thresholding and dilating the alpha matte obtained by our method. A few frames are shown in Figure 11.

 Figure 10.")





![in [4], obtained by](/docs-images/80/81438095/images/8-7.jpg "their provided")





.")

 6.")


")

































8 Figure 8. Video example 1. (a total of 71 frames) Figure 10. Video example 3. (a total of 78 frames) Figure 11. Comparison with the rotoscoping algorithm in [4]. The curves indicate the boundaries. Top row: A few frames for the work in [4], obtained by their provided interface. The small squares are the control points of the splines. Bottom row: Results from our approach, obtaining similar segmentation with significantly less user intervention (see Figure 8). Figure 9. Video example 2. (a total of 79 frames) 6. Conclusions and future work We presented a geodesics-based algorithm for (interactive) natural image and video segmentation and matting. We introduced the framework for still images and extended it to video segmentation and matting. We added constraints to the distance function in order to handle objects that cross each other in the video temporal domain. We showed examples illustrating the application of this framework to very different images and videos, including videos with dynamic background and moving cameras. Another application of our approach is to speed up available image matting algorithms (e.g. [20]). A narrow band trimap is quickly generated from a few scribbles, and then a different matting algorithm is applied. Figure 12 shows our method working in conjunction with [20]. Although the proposed framework is general, we mainly exploited weights in the geodesic computation that depend on the pixel value distributions. As such, in this form the algorithm works best when these distributions do not significantly overlap. In principle, this can be solved with enough user interactions, but could be tedious, and would be better to solve this by enhancing the features used in deriving the weights. Our current efforts are concentrated on enhancing the features we currently use for weighting the geodesic. Also, we are investigating how to naturally add a regularization term into the model, without having to perform this as a post-processing step as currently done. Results in these directions will be reported elsewhere. References [1] Adobe Photoshop User Guide. ADOBE SYSTEMS
![(a) (b) (c) (d) Figure 12. Our approach for speeding up [20]. (a) User inputs. (b) Boundary quickly found by our algorithm with the very few scribbles. (c) Trimap as input of [20].](/docs-images/80/81438095/images/9-0.jpg "(d) Foreground extracted by [20]. INCORP, 2002. 4, 5 [2] Knockout User Guide. COREL CORPORATION, 2002. 4, 5 [3] Adobe Photoshop CS3 New Features. http: //www.adobe.")
![com/products/photoshop/ photoshop, 2007. 4, 5 [4] A. Agarwala, A. Hertzmann, D. Salesin, and S. Seitz. Keyframe-based tracking for rotoscoping and animation. Proceedings of SIGGRAPH 04, 2004.](/docs-images/80/81438095/images/9-1.jpg "1, 6, 7 [5] Y. Y. Boykov and M.-P. Jolly. Interactive graph cuts for optimal boundary and region segmentation of objects in n-d images. IEEE ICCV 2001, 01:105, 2001. 2 [6] Y.-Y. Chuang, A.")
![Agarwala, B. Curless, D. H. Salesin, and R. Szeliski. Video matting of complex scenes. In SIGGRAPH 02, pages 243 248, 2002. 2 [7] Y.-Y. Chuang, B. Curless, D. H. Salesin, and R. Szeliski. A bayesian approach to digital matting.](/docs-images/80/81438095/images/9-2.jpg "In Proceedings of IEEE CVPR 2001, volume 2, pages 264 271, December 2001. 2 [8] A. Criminisi, G. Cross, A. Blake, and V. Kolmogorov. Bilayer segmentation of live video.")
9 (a) (b) (c) (d) Figure 12. Our approach for speeding up [20]. (a) User inputs. (b) Boundary quickly found by our algorithm with the very few scribbles. (c) Trimap as input of [20]. (d) Foreground extracted by [20]. INCORP, , 5 [2] Knockout User Guide. COREL CORPORATION, , 5 [3] Adobe Photoshop CS3 New Features. http: // photoshop, , 5 [4] A. Agarwala, A. Hertzmann, D. Salesin, and S. Seitz. Keyframe-based tracking for rotoscoping and animation. Proceedings of SIGGRAPH 04, , 6, 7 [5] Y. Y. Boykov and M.-P. Jolly. Interactive graph cuts for optimal boundary and region segmentation of objects in n-d images. IEEE ICCV 2001, 01:105, [6] Y.-Y. Chuang, A. Agarwala, B. Curless, D. H. Salesin, and R. Szeliski. Video matting of complex scenes. In SIGGRAPH 02, pages , [7] Y.-Y. Chuang, B. Curless, D. H. Salesin, and R. Szeliski. A bayesian approach to digital matting. In Proceedings of IEEE CVPR 2001, volume 2, pages , December [8] A. Criminisi, G. Cross, A. Blake, and V. Kolmogorov. Bilayer segmentation of live video. In Proceedings of IEEE CVPR 2006, pages 53 60, [9] L. Grady. Random walks for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell., 28(11): , [10] A. Levin, A. R. Acha, and D. Lischinski. Spectral matting. In Proceedings of IEEE CVPR 2007, June , 4, 5 [11] A. Levin, D. Lischinski, and Y. Weiss. Colorization using optimization. SIGGRAPH 04, 23(3): , [12] A. Levin, D. Lischinski, and Y. Weiss. A closed form solution to natural image matting. In Proceedings of IEEE CVPR 2006, pages 61 68, [13] A. Protiere and G. Sapiro. Interactive image segmentation via adaptive weighted distances. IEEE Trans. Image Processing, 16: , [14] C. Rother, V. Kolmogorov, and A. Blake. Grabcut: Interactive foreground extraction using iterated graph cuts. SIGGRAPH 04, [15] J. Sun, J. Jia, C.-K. Tang, and H.-Y. Shum. Poisson matting. In SIGGRAPH 04, pages , [16] J. Sun, J. Sun, S. Kang, Z. Xu, X. Tang, and H.-Y. Shum. Flash cut: Foreground extraction with flash and no-flash image pairs. In Proceedings of IEEE CVPR 2007, June [17] J. Wang, M. Agrawala, and M. F. Cohen. Soft scissors: An interactive tool for realtime high quality matting. In SIGGRAPH 07, [18] J. Wang, P. Bhat, R. A. Colburn, M. Agrawala, and M. F. Cohen. Interactive video cutout. SIG- GRAPH 05, 24(3): , [19] J. Wang and M. Cohen. Optimized color sampling for robust matting. In Proceedings of IEEE CVPR 2007, June [20] J. Wang and M. F. Cohen. An iterative optimization approach for unified image segmentation and matting. In Proceedings of IEEE ICCV 2005, pages , , 4, 5, 7, 8 [21] C. Yang, R. Duraiswami, N. Gumerov, and L. Davis. Improved fast gauss transform and efficient kernel density estimation. In Proceedings IEEE ICCV 2003, Nice, France, pages , [22] L. Yatziv, A. Bartesaghi, and G. Sapiro. O(n) implementation of the fast marching algorithm. Journal of Computational Physics, 212: , [23] L. Yatziv and G. Sapiro. Fast image and video colorization using chrominance blending. IEEE Trans. on Image Processing, 15:5: , , 5
IMA Preprint Series # 2153
 DISTANCECUT: INTERACTIVE REAL-TIME SEGMENTATION AND MATTING OF IMAGES AND VIDEOS By Xue Bai and Guillermo Sapiro IMA Preprint Series # 2153 ( January 2007 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS
DISTANCECUT: INTERACTIVE REAL-TIME SEGMENTATION AND MATTING OF IMAGES AND VIDEOS By Xue Bai and Guillermo Sapiro IMA Preprint Series # 2153 ( January 2007 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS
Soft Scissors : An Interactive Tool for Realtime High Quality Matting
 Soft Scissors : An Interactive Tool for Realtime High Quality Matting Jue Wang University of Washington Maneesh Agrawala University of California, Berkeley Michael F. Cohen Microsoft Research Figure 1:
Soft Scissors : An Interactive Tool for Realtime High Quality Matting Jue Wang University of Washington Maneesh Agrawala University of California, Berkeley Michael F. Cohen Microsoft Research Figure 1:
Dynamic Color Flow: A Motion-Adaptive Color Model for Object Segmentation in Video
 Dynamic Color Flow: A Motion-Adaptive Color Model for Object Segmentation in Video Xue Bai 1, Jue Wang 2, and Guillermo Sapiro 1 1 University of Minnesota, Minneapolis, MN 55455, USA 2 Adobe Systems, Seattle,
Dynamic Color Flow: A Motion-Adaptive Color Model for Object Segmentation in Video Xue Bai 1, Jue Wang 2, and Guillermo Sapiro 1 1 University of Minnesota, Minneapolis, MN 55455, USA 2 Adobe Systems, Seattle,
IMA Preprint Series # 2016
 VIDEO INPAINTING OF OCCLUDING AND OCCLUDED OBJECTS By Kedar A. Patwardhan Guillermo Sapiro and Marcelo Bertalmio IMA Preprint Series # 2016 ( January 2005 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS
VIDEO INPAINTING OF OCCLUDING AND OCCLUDED OBJECTS By Kedar A. Patwardhan Guillermo Sapiro and Marcelo Bertalmio IMA Preprint Series # 2016 ( January 2005 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS
Color Me Right Seamless Image Compositing
 Color Me Right Seamless Image Compositing Dong Guo and Terence Sim School of Computing National University of Singapore Singapore, 117417 Abstract. This paper introduces an approach of creating an image
Color Me Right Seamless Image Compositing Dong Guo and Terence Sim School of Computing National University of Singapore Singapore, 117417 Abstract. This paper introduces an approach of creating an image
Simultaneous Foreground, Background, and Alpha Estimation for Image Matting
 Brigham Young University BYU ScholarsArchive All Faculty Publications 2010-06-01 Simultaneous Foreground, Background, and Alpha Estimation for Image Matting Bryan S. Morse morse@byu.edu Brian L. Price
Brigham Young University BYU ScholarsArchive All Faculty Publications 2010-06-01 Simultaneous Foreground, Background, and Alpha Estimation for Image Matting Bryan S. Morse morse@byu.edu Brian L. Price
Graph-Based Superpixel Labeling for Enhancement of Online Video Segmentation
 Graph-Based Superpixel Labeling for Enhancement of Online Video Segmentation Alaa E. Abdel-Hakim Electrical Engineering Department Assiut University Assiut, Egypt alaa.aly@eng.au.edu.eg Mostafa Izz Cairo
Graph-Based Superpixel Labeling for Enhancement of Online Video Segmentation Alaa E. Abdel-Hakim Electrical Engineering Department Assiut University Assiut, Egypt alaa.aly@eng.au.edu.eg Mostafa Izz Cairo
Video Object Cut and Paste
 Video Object Cut and Paste Yin Li Jian Sun Heung-Yeung Shum Microsoft Research Asia (a) Figure 1: Given a video (a) containing an opaque video object on a complicated background, our system can generate
Video Object Cut and Paste Yin Li Jian Sun Heung-Yeung Shum Microsoft Research Asia (a) Figure 1: Given a video (a) containing an opaque video object on a complicated background, our system can generate
Stereo Matching on Objects with Fractional Boundary
 Stereo Matching on Objects with Fractional Boundary Wei Xiong and iaya ia Department of Computer Science and Engineering The Chinese University of Hong Kong {wxiong, leojia}@cse.cuhk.edu.hk Abstract Conventional
Stereo Matching on Objects with Fractional Boundary Wei Xiong and iaya ia Department of Computer Science and Engineering The Chinese University of Hong Kong {wxiong, leojia}@cse.cuhk.edu.hk Abstract Conventional
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Segmentation Based Stereo. Michael Bleyer LVA Stereo Vision
 Segmentation Based Stereo Michael Bleyer LVA Stereo Vision What happened last time? Once again, we have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > We have investigated the matching
Segmentation Based Stereo Michael Bleyer LVA Stereo Vision What happened last time? Once again, we have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > We have investigated the matching
A New Technique for Adding Scribbles in Video Matting
 www.ijcsi.org 116 A New Technique for Adding Scribbles in Video Matting Neven Galal El Gamal 1, F. E.Z. Abou-Chadi 2 and Hossam El-Din Moustafa 3 1,2,3 Department of Electronics & Communications Engineering
www.ijcsi.org 116 A New Technique for Adding Scribbles in Video Matting Neven Galal El Gamal 1, F. E.Z. Abou-Chadi 2 and Hossam El-Din Moustafa 3 1,2,3 Department of Electronics & Communications Engineering
Dynamic Shape Tracking via Region Matching
 Dynamic Shape Tracking via Region Matching Ganesh Sundaramoorthi Asst. Professor of EE and AMCS KAUST (Joint work with Yanchao Yang) The Problem: Shape Tracking Given: exact object segmentation in frame1
Dynamic Shape Tracking via Region Matching Ganesh Sundaramoorthi Asst. Professor of EE and AMCS KAUST (Joint work with Yanchao Yang) The Problem: Shape Tracking Given: exact object segmentation in frame1
Automatic Trimap Generation for Digital Image Matting
 Automatic Trimap Generation for Digital Image Matting Chang-Lin Hsieh and Ming-Sui Lee Department of Computer Science and Information Engineering, National Taiwan University, Taipei, Taiwan, R.O.C. E-mail:
Automatic Trimap Generation for Digital Image Matting Chang-Lin Hsieh and Ming-Sui Lee Department of Computer Science and Information Engineering, National Taiwan University, Taipei, Taiwan, R.O.C. E-mail:
Extracting Smooth and Transparent Layers from a Single Image
 Extracting Smooth and Transparent Layers from a Single Image Sai-Kit Yeung Tai-Pang Wu Chi-Keung Tang saikit@ust.hk pang@ust.hk cktang@cse.ust.hk Vision and Graphics Group The Hong Kong University of Science
Extracting Smooth and Transparent Layers from a Single Image Sai-Kit Yeung Tai-Pang Wu Chi-Keung Tang saikit@ust.hk pang@ust.hk cktang@cse.ust.hk Vision and Graphics Group The Hong Kong University of Science
Spectral Video Matting
 Spectral Video Matting Martin Eisemann, Julia Wolf and Marcus Magnor Computer Graphics Lab, TU Braunschweig, Germany Email: eisemann@cg.tu-bs.de, wolf@tu-bs.de, magnor@cg.tu-bs.de Abstract We present a
Spectral Video Matting Martin Eisemann, Julia Wolf and Marcus Magnor Computer Graphics Lab, TU Braunschweig, Germany Email: eisemann@cg.tu-bs.de, wolf@tu-bs.de, magnor@cg.tu-bs.de Abstract We present a
A Benchmark for Interactive Image Segmentation Algorithms
 A Benchmark for Interactive Image Segmentation Algorithms Yibiao Zhao 1,3, Xiaohan Nie 2,3, Yanbiao Duan 2,3, Yaping Huang 1, Siwei Luo 1 1 Beijing Jiaotong University, 2 Beijing Institute of Technology,
A Benchmark for Interactive Image Segmentation Algorithms Yibiao Zhao 1,3, Xiaohan Nie 2,3, Yanbiao Duan 2,3, Yaping Huang 1, Siwei Luo 1 1 Beijing Jiaotong University, 2 Beijing Institute of Technology,
Pattern Recognition Letters
 Pattern Recognition Letters 33 (2012) 920 933 Contents lists available at ScienceDirect Pattern Recognition Letters journal homepage: www.elsevier.com/locate/patrec Dynamic curve color model for image
Pattern Recognition Letters 33 (2012) 920 933 Contents lists available at ScienceDirect Pattern Recognition Letters journal homepage: www.elsevier.com/locate/patrec Dynamic curve color model for image
Experts-Shift: Learning Active Spatial Classification Experts for Keyframe-based Video Segmentation
 Experts-Shift: Learning Active Spatial Classification Experts for Keyframe-based Video Segmentation Yibiao Zhao 1,3, Yanbiao Duan 2,3, Xiaohan Nie 2,3, Yaping Huang 1, Siwei Luo 1 1 Beijing Jiaotong University,
Experts-Shift: Learning Active Spatial Classification Experts for Keyframe-based Video Segmentation Yibiao Zhao 1,3, Yanbiao Duan 2,3, Xiaohan Nie 2,3, Yaping Huang 1, Siwei Luo 1 1 Beijing Jiaotong University,
arxiv: v2 [cs.cv] 4 Jul 2017
![arxiv: v2 [cs.cv] 4 Jul 2017](/thumbs/93/113912594.jpg "arxiv: v2 [cs.cv] 4 Jul 2017") Automatic Trimap Generation for Image Matting Vikas Gupta, Shanmuganathan Raman gupta.vikas@iitgn.ac.in, shanmuga@iitgn.ac.in arxiv:1707.00333v2 [cs.cv] 4 Jul 2017 Electrical Engineering Indian Institute
Automatic Trimap Generation for Image Matting Vikas Gupta, Shanmuganathan Raman gupta.vikas@iitgn.ac.in, shanmuga@iitgn.ac.in arxiv:1707.00333v2 [cs.cv] 4 Jul 2017 Electrical Engineering Indian Institute
IMA Preprint Series # 1979
 INPAINTING THE COLORS By Guillermo Sapiro IMA Preprint Series # 1979 ( May 2004 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS UNIVERSITY OF MINNESOTA 514 Vincent Hall 206 Church Street S.E. Minneapolis,
INPAINTING THE COLORS By Guillermo Sapiro IMA Preprint Series # 1979 ( May 2004 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS UNIVERSITY OF MINNESOTA 514 Vincent Hall 206 Church Street S.E. Minneapolis,
Video Operations in the Gradient Domain. Abstract. these operations on video in the gradient domain. Our approach consists of 3D graph cut computation
 Video Operations in the Gradient Domain 1 Abstract Fusion of image sequences is a fundamental operation in numerous video applications and usually consists of segmentation, matting and compositing. We
Video Operations in the Gradient Domain 1 Abstract Fusion of image sequences is a fundamental operation in numerous video applications and usually consists of segmentation, matting and compositing. We
Divide and Conquer: A Self-Adaptive Approach for High-Resolution Image Matting
 Divide and Conquer: A Self-Adaptive Approach for High-Resolution Image Matting Guangying Cao,Jianwei Li, Xiaowu Chen State Key Laboratory of Virtual Reality Technology and Systems School of Computer Science
Divide and Conquer: A Self-Adaptive Approach for High-Resolution Image Matting Guangying Cao,Jianwei Li, Xiaowu Chen State Key Laboratory of Virtual Reality Technology and Systems School of Computer Science
Panoramic Video Texture
 Aseem Agarwala, Colin Zheng, Chris Pal, Maneesh Agrawala, Michael Cohen, Brian Curless, David Salesin, Richard Szeliski A paper accepted for SIGGRAPH 05 presented by 1 Outline Introduction & Motivation
Aseem Agarwala, Colin Zheng, Chris Pal, Maneesh Agrawala, Michael Cohen, Brian Curless, David Salesin, Richard Szeliski A paper accepted for SIGGRAPH 05 presented by 1 Outline Introduction & Motivation
Stereo Matching: An Outlier Confidence Approach
 Stereo Matching: An Outlier Confidence Approach Li Xu and Jiaya Jia Department of Computer Science and Engineering The Chinese University of Hong Kong {xuli,leojia}@cse.cuhk.edu.hk Abstract. One of the
Stereo Matching: An Outlier Confidence Approach Li Xu and Jiaya Jia Department of Computer Science and Engineering The Chinese University of Hong Kong {xuli,leojia}@cse.cuhk.edu.hk Abstract. One of the
Prof. Feng Liu. Spring /17/2017. With slides by F. Durand, Y.Y. Chuang, R. Raskar, and C.
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 05/17/2017 With slides by F. Durand, Y.Y. Chuang, R. Raskar, and C. Rother Last Time Image segmentation Normalized cut and segmentation
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 05/17/2017 With slides by F. Durand, Y.Y. Chuang, R. Raskar, and C. Rother Last Time Image segmentation Normalized cut and segmentation
Specular Reflection Separation using Dark Channel Prior
 2013 IEEE Conference on Computer Vision and Pattern Recognition Specular Reflection Separation using Dark Channel Prior Hyeongwoo Kim KAIST hyeongwoo.kim@kaist.ac.kr Hailin Jin Adobe Research hljin@adobe.com
2013 IEEE Conference on Computer Vision and Pattern Recognition Specular Reflection Separation using Dark Channel Prior Hyeongwoo Kim KAIST hyeongwoo.kim@kaist.ac.kr Hailin Jin Adobe Research hljin@adobe.com
A Closed-Form Solution to Natural Image Matting
 1 A Closed-Form Solution to Natural Image Matting Anat Levin Dani Lischinski Yair Weiss School of Computer Science and Engineering The Hebrew University of Jerusalem Abstract Interactive digital matting,
1 A Closed-Form Solution to Natural Image Matting Anat Levin Dani Lischinski Yair Weiss School of Computer Science and Engineering The Hebrew University of Jerusalem Abstract Interactive digital matting,
A Feature Point Matching Based Approach for Video Objects Segmentation
 A Feature Point Matching Based Approach for Video Objects Segmentation Yan Zhang, Zhong Zhou, Wei Wu State Key Laboratory of Virtual Reality Technology and Systems, Beijing, P.R. China School of Computer
A Feature Point Matching Based Approach for Video Objects Segmentation Yan Zhang, Zhong Zhou, Wei Wu State Key Laboratory of Virtual Reality Technology and Systems, Beijing, P.R. China School of Computer
Interactive Image Matting for Multiple Layers
 Interactive Image Matting for Multiple Layers Dheeraj Singaraju René Vidal Center for Imaging Science, Johns Hopkins University, Baltimore, MD 118, USA Abstract Image matting deals with finding the probability
Interactive Image Matting for Multiple Layers Dheeraj Singaraju René Vidal Center for Imaging Science, Johns Hopkins University, Baltimore, MD 118, USA Abstract Image matting deals with finding the probability
PAPER Video Segmentation with Motion Smoothness
 IEICE TRANS. INF. & SYST., VOL.E93 D, NO.4 APRIL 2010 873 PAPER Video Segmentation with Motion Smoothness Chung-Lin WEN a), Nonmember, Bing-Yu CHEN b), and Yoichi SATO c), Members SUMMARY In this paper,
IEICE TRANS. INF. & SYST., VOL.E93 D, NO.4 APRIL 2010 873 PAPER Video Segmentation with Motion Smoothness Chung-Lin WEN a), Nonmember, Bing-Yu CHEN b), and Yoichi SATO c), Members SUMMARY In this paper,
Photoshop Quickselect & Interactive Digital Photomontage
 Photoshop Quickselect & Interactive Digital Photomontage By Joseph Tighe 1 Photoshop Quickselect Based on the graph cut technology discussed Boykov-Kolmogorov What might happen when we use a color model?
Photoshop Quickselect & Interactive Digital Photomontage By Joseph Tighe 1 Photoshop Quickselect Based on the graph cut technology discussed Boykov-Kolmogorov What might happen when we use a color model?
Targil 10 : Why Mosaic? Why is this a challenge? Exposure differences Scene illumination Miss-registration Moving objects
 Why Mosaic? Are you getting the whole picture? Compact Camera FOV = 5 x 35 Targil : Panoramas - Stitching and Blending Some slides from Alexei Efros 2 Slide from Brown & Lowe Why Mosaic? Are you getting
Why Mosaic? Are you getting the whole picture? Compact Camera FOV = 5 x 35 Targil : Panoramas - Stitching and Blending Some slides from Alexei Efros 2 Slide from Brown & Lowe Why Mosaic? Are you getting
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Adding a Transparent Object on Image
 Adding a Transparent Object on Image Liliana, Meliana Luwuk, Djoni Haryadi Setiabudi Informatics Department, Petra Christian University, Surabaya, Indonesia lilian@petra.ac.id, m26409027@john.petra.ac.id,
Adding a Transparent Object on Image Liliana, Meliana Luwuk, Djoni Haryadi Setiabudi Informatics Department, Petra Christian University, Surabaya, Indonesia lilian@petra.ac.id, m26409027@john.petra.ac.id,
Capturing Skeleton-based Animation Data from a Video
 Capturing Skeleton-based Animation Data from a Video Liang-Yu Shih, Bing-Yu Chen National Taiwan University E-mail: xdd@cmlab.csie.ntu.edu.tw, robin@ntu.edu.tw ABSTRACT This paper presents a semi-automatic
Capturing Skeleton-based Animation Data from a Video Liang-Yu Shih, Bing-Yu Chen National Taiwan University E-mail: xdd@cmlab.csie.ntu.edu.tw, robin@ntu.edu.tw ABSTRACT This paper presents a semi-automatic
Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing
 Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200,
Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200,
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
Fast Image Stitching and Editing for Panorama Painting on Mobile Phones
 in IEEE Workshop on Mobile Vision, in Conjunction with CVPR 2010 (IWMV2010), San Francisco, 2010, IEEE Computer Society Fast Image Stitching and Editing for Panorama Painting on Mobile Phones Yingen Xiong
in IEEE Workshop on Mobile Vision, in Conjunction with CVPR 2010 (IWMV2010), San Francisco, 2010, IEEE Computer Society Fast Image Stitching and Editing for Panorama Painting on Mobile Phones Yingen Xiong
Markov Random Fields and Segmentation with Graph Cuts
 Markov Random Fields and Segmentation with Graph Cuts Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project Proposal due Oct 27 (Thursday) HW 4 is out
Markov Random Fields and Segmentation with Graph Cuts Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project Proposal due Oct 27 (Thursday) HW 4 is out
Color Source Separation for Enhanced Pixel Manipulations MSR-TR
 Color Source Separation for Enhanced Pixel Manipulations MSR-TR-2-98 C. Lawrence Zitnick Microsoft Research larryz@microsoft.com Devi Parikh Toyota Technological Institute, Chicago (TTIC) dparikh@ttic.edu
Color Source Separation for Enhanced Pixel Manipulations MSR-TR-2-98 C. Lawrence Zitnick Microsoft Research larryz@microsoft.com Devi Parikh Toyota Technological Institute, Chicago (TTIC) dparikh@ttic.edu
Topics to be Covered in the Rest of the Semester. CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester
 Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
TVSeg - Interactive Total Variation Based Image Segmentation
 TVSeg - Interactive Total Variation Based Image Segmentation Markus Unger 1, Thomas Pock 1,2, Werner Trobin 1, Daniel Cremers 2, Horst Bischof 1 1 Inst. for Computer Graphics & Vision, Graz University
TVSeg - Interactive Total Variation Based Image Segmentation Markus Unger 1, Thomas Pock 1,2, Werner Trobin 1, Daniel Cremers 2, Horst Bischof 1 1 Inst. for Computer Graphics & Vision, Graz University
Fast Image Stitching and Editing for Panorama Painting on Mobile Phones
 Fast Image Stitching and Editing for Panorama Painting on Mobile Phones Yingen Xiong and Kari Pulli Nokia Research Center 955 Page Mill Road, Palo Alto, CA 94304, USA {yingen.xiong, kari.pulli}@nokia.com
Fast Image Stitching and Editing for Panorama Painting on Mobile Phones Yingen Xiong and Kari Pulli Nokia Research Center 955 Page Mill Road, Palo Alto, CA 94304, USA {yingen.xiong, kari.pulli}@nokia.com
AUTOMATIC OBJECT EXTRACTION IN SINGLE-CONCEPT VIDEOS. Kuo-Chin Lien and Yu-Chiang Frank Wang
 AUTOMATIC OBJECT EXTRACTION IN SINGLE-CONCEPT VIDEOS Kuo-Chin Lien and Yu-Chiang Frank Wang Research Center for Information Technology Innovation, Academia Sinica, Taipei, Taiwan {iker, ycwang}@citi.sinica.edu.tw
AUTOMATIC OBJECT EXTRACTION IN SINGLE-CONCEPT VIDEOS Kuo-Chin Lien and Yu-Chiang Frank Wang Research Center for Information Technology Innovation, Academia Sinica, Taipei, Taiwan {iker, ycwang}@citi.sinica.edu.tw
Image Stitching using Watersheds and Graph Cuts
 Image Stitching using Watersheds and Graph Cuts Patrik Nyman Centre for Mathematical Sciences, Lund University, Sweden patnym@maths.lth.se 1. Introduction Image stitching is commonly used in many different
Image Stitching using Watersheds and Graph Cuts Patrik Nyman Centre for Mathematical Sciences, Lund University, Sweden patnym@maths.lth.se 1. Introduction Image stitching is commonly used in many different
Applied Bayesian Nonparametrics 5. Spatial Models via Gaussian Processes, not MRFs Tutorial at CVPR 2012 Erik Sudderth Brown University
 Applied Bayesian Nonparametrics 5. Spatial Models via Gaussian Processes, not MRFs Tutorial at CVPR 2012 Erik Sudderth Brown University NIPS 2008: E. Sudderth & M. Jordan, Shared Segmentation of Natural
Applied Bayesian Nonparametrics 5. Spatial Models via Gaussian Processes, not MRFs Tutorial at CVPR 2012 Erik Sudderth Brown University NIPS 2008: E. Sudderth & M. Jordan, Shared Segmentation of Natural
Image Segmentation Via Iterative Geodesic Averaging
 Image Segmentation Via Iterative Geodesic Averaging Asmaa Hosni, Michael Bleyer and Margrit Gelautz Institute for Software Technology and Interactive Systems, Vienna University of Technology Favoritenstr.
Image Segmentation Via Iterative Geodesic Averaging Asmaa Hosni, Michael Bleyer and Margrit Gelautz Institute for Software Technology and Interactive Systems, Vienna University of Technology Favoritenstr.
Drag and Drop Pasting
 Drag and Drop Pasting Jiaya Jia, Jian Sun, Chi-Keung Tang, Heung-Yeung Shum The Chinese University of Hong Kong Microsoft Research Asia The Hong Kong University of Science and Technology Presented By Bhaskar
Drag and Drop Pasting Jiaya Jia, Jian Sun, Chi-Keung Tang, Heung-Yeung Shum The Chinese University of Hong Kong Microsoft Research Asia The Hong Kong University of Science and Technology Presented By Bhaskar
IMA Preprint Series # 2154
 A GRAPH-BASED FOREGROUND REPRESENTATION AND ITS APPLICATION IN EXAMPLE BASED PEOPLE MATCHING IN VIDEO By Kedar A. Patwardhan Guillermo Sapiro and Vassilios Morellas IMA Preprint Series # 2154 ( January
A GRAPH-BASED FOREGROUND REPRESENTATION AND ITS APPLICATION IN EXAMPLE BASED PEOPLE MATCHING IN VIDEO By Kedar A. Patwardhan Guillermo Sapiro and Vassilios Morellas IMA Preprint Series # 2154 ( January
Free Appearance-Editing with Improved Poisson Image Cloning
 Bie XH, Huang HD, Wang WC. Free appearance-editing with improved Poisson image cloning. JOURNAL OF COMPUTER SCIENCE AND TECHNOLOGY 26(6): 1011 1016 Nov. 2011. DOI 10.1007/s11390-011-1197-5 Free Appearance-Editing
Bie XH, Huang HD, Wang WC. Free appearance-editing with improved Poisson image cloning. JOURNAL OF COMPUTER SCIENCE AND TECHNOLOGY 26(6): 1011 1016 Nov. 2011. DOI 10.1007/s11390-011-1197-5 Free Appearance-Editing
Announcements. Image Segmentation. From images to objects. Extracting objects. Status reports next Thursday ~5min presentations in class
 Image Segmentation Announcements Status reports next Thursday ~5min presentations in class Project voting From Sandlot Science Today s Readings Forsyth & Ponce, Chapter 1 (plus lots of optional references
Image Segmentation Announcements Status reports next Thursday ~5min presentations in class Project voting From Sandlot Science Today s Readings Forsyth & Ponce, Chapter 1 (plus lots of optional references
High Resolution Matting via Interactive Trimap Segmentation
 High Resolution Matting via Interactive Trimap Segmentation Technical report corresponding to the CVPR 08 paper TR-188-2-2008-04 Christoph Rhemann 1, Carsten Rother 2, Alex Rav-Acha 3, Toby Sharp 2 1 Institute
High Resolution Matting via Interactive Trimap Segmentation Technical report corresponding to the CVPR 08 paper TR-188-2-2008-04 Christoph Rhemann 1, Carsten Rother 2, Alex Rav-Acha 3, Toby Sharp 2 1 Institute
Single Image Motion Deblurring Using Transparency
 Single Image Motion Deblurring Using Transparency Jiaya Jia Department of Computer Science and Engineering The Chinese University of Hong Kong leojia@cse.cuhk.edu.hk Abstract One of the key problems of
Single Image Motion Deblurring Using Transparency Jiaya Jia Department of Computer Science and Engineering The Chinese University of Hong Kong leojia@cse.cuhk.edu.hk Abstract One of the key problems of
Browsing: Query Refinement and Video Synopsis
 April 23, 2009 CuZero: Frontier of Interactive Visual Search Goals Finding interesting content in video and images Solution Better video and image search Video synopsis to quickly scan long video Current
April 23, 2009 CuZero: Frontier of Interactive Visual Search Goals Finding interesting content in video and images Solution Better video and image search Video synopsis to quickly scan long video Current
Motion Regularization for Matting Motion Blurred Objects
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 33, NO. 11, NOVEMBER 2011 2329 Motion Regularization for Matting Motion Blurred Objects Hai Ting Lin, Yu-Wing Tai, and Michael S. Brown
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 33, NO. 11, NOVEMBER 2011 2329 Motion Regularization for Matting Motion Blurred Objects Hai Ting Lin, Yu-Wing Tai, and Michael S. Brown
Transductive Object Cutout
 Transductive Object Cutout Jingyu Cui 1, Qiong Yang 3, Fang Wen 2, Qiying Wu 4, Changshui Zhang 1, Luc Van Gool 3, and Xiaoou Tang 2 1 Tsinghua University, Beijing, China cui-jy@mails.thu.edu.cn, zcs@mail.thu.edu.cn
Transductive Object Cutout Jingyu Cui 1, Qiong Yang 3, Fang Wen 2, Qiying Wu 4, Changshui Zhang 1, Luc Van Gool 3, and Xiaoou Tang 2 1 Tsinghua University, Beijing, China cui-jy@mails.thu.edu.cn, zcs@mail.thu.edu.cn
IMA Preprint Series # 1979
 INPAINTING THE COLORS By Guillermo Sapiro IMA Preprint Series # 1979 ( May 2004 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS UNIVERSITY OF MINNESOTA 514 Vincent Hall 206 Church Street S.E. Minneapolis,
INPAINTING THE COLORS By Guillermo Sapiro IMA Preprint Series # 1979 ( May 2004 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS UNIVERSITY OF MINNESOTA 514 Vincent Hall 206 Church Street S.E. Minneapolis,
Fast Image Labeling for Creating High-Resolution Panoramic Images on Mobile Devices
 Multimedia, IEEE International Symposium on, vol. 0, pp. 369 376, 2009. Fast Image Labeling for Creating High-Resolution Panoramic Images on Mobile Devices Yingen Xiong and Kari Pulli Nokia Research Center
Multimedia, IEEE International Symposium on, vol. 0, pp. 369 376, 2009. Fast Image Labeling for Creating High-Resolution Panoramic Images on Mobile Devices Yingen Xiong and Kari Pulli Nokia Research Center
People Tracking and Segmentation Using Efficient Shape Sequences Matching
 People Tracking and Segmentation Using Efficient Shape Sequences Matching Junqiu Wang, Yasushi Yagi, and Yasushi Makihara The Institute of Scientific and Industrial Research, Osaka University 8-1 Mihogaoka,
People Tracking and Segmentation Using Efficient Shape Sequences Matching Junqiu Wang, Yasushi Yagi, and Yasushi Makihara The Institute of Scientific and Industrial Research, Osaka University 8-1 Mihogaoka,
Paint Selection. Jian Sun Microsoft Research Asia
 Paint Selection Jiangyu Liu University of Science and Technology of China Jian Sun Microsoft Research Asia Heung-Yeung Shum Microsoft Corporation Figure 1: Left three: the user makes a selection by painting
Paint Selection Jiangyu Liu University of Science and Technology of China Jian Sun Microsoft Research Asia Heung-Yeung Shum Microsoft Corporation Figure 1: Left three: the user makes a selection by painting
IMA Preprint Series # 2052
 FAST IMAGE AND VIDEO DENOISING VIA NON-LOCAL MEANS OF SIMILAR NEIGHBORHOODS By Mona Mahmoudi and Guillermo Sapiro IMA Preprint Series # 2052 ( June 2005 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS
FAST IMAGE AND VIDEO DENOISING VIA NON-LOCAL MEANS OF SIMILAR NEIGHBORHOODS By Mona Mahmoudi and Guillermo Sapiro IMA Preprint Series # 2052 ( June 2005 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS
Animating Characters in Pictures
 Animating Characters in Pictures Shih-Chiang Dai jeffrey@cmlab.csie.ntu.edu.tw Chun-Tse Hsiao hsiaochm@cmlab.csie.ntu.edu.tw Bing-Yu Chen robin@ntu.edu.tw ABSTRACT Animating pictures is an interesting
Animating Characters in Pictures Shih-Chiang Dai jeffrey@cmlab.csie.ntu.edu.tw Chun-Tse Hsiao hsiaochm@cmlab.csie.ntu.edu.tw Bing-Yu Chen robin@ntu.edu.tw ABSTRACT Animating pictures is an interesting
Image Blending and Compositing NASA
 Image Blending and Compositing NASA CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016 Image Compositing Compositing Procedure 1. Extract Sprites (e.g using Intelligent
Image Blending and Compositing NASA CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016 Image Compositing Compositing Procedure 1. Extract Sprites (e.g using Intelligent
IMA Preprint Series # 2080
 PIXEL LAYERING AND LAYER PROPAGATION FOR VIDEO MODELLING AND FOREGROUND DETECTION By Kedar A. Patwardhan Guillermo Sapiro and Vassilios Morellas IMA Preprint Series # 2080 ( November 2005 ) INSTITUTE FOR
PIXEL LAYERING AND LAYER PROPAGATION FOR VIDEO MODELLING AND FOREGROUND DETECTION By Kedar A. Patwardhan Guillermo Sapiro and Vassilios Morellas IMA Preprint Series # 2080 ( November 2005 ) INSTITUTE FOR
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
FOREGROUND SEGMENTATION BASED ON MULTI-RESOLUTION AND MATTING
 FOREGROUND SEGMENTATION BASED ON MULTI-RESOLUTION AND MATTING Xintong Yu 1,2, Xiaohan Liu 1,2, Yisong Chen 1 1 Graphics Laboratory, EECS Department, Peking University 2 Beijing University of Posts and
FOREGROUND SEGMENTATION BASED ON MULTI-RESOLUTION AND MATTING Xintong Yu 1,2, Xiaohan Liu 1,2, Yisong Chen 1 1 Graphics Laboratory, EECS Department, Peking University 2 Beijing University of Posts and
Overview. Video. Overview 4/7/2008. Optical flow. Why estimate motion? Motion estimation: Optical flow. Motion Magnification Colorization.
 Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Lazy Snapping. A paper from Siggraph04 by Yin Li, Jian Sun, Chi-KeungTang, Heung-Yeung Shum, Microsoft Research Asia. Presented by Gerhard Röthlin
 A paper from Siggraph04 by Yin Li, Jian Sun, Chi-KeungTang, Heung-Yeung Shum, Microsoft Research Asia Presented by Gerhard Röthlin 1 Image Cutout Composing a foreground object with an alternative background
A paper from Siggraph04 by Yin Li, Jian Sun, Chi-KeungTang, Heung-Yeung Shum, Microsoft Research Asia Presented by Gerhard Röthlin 1 Image Cutout Composing a foreground object with an alternative background
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Object Extraction Using Image Segmentation and Adaptive Constraint Propagation
 Object Extraction Using Image Segmentation and Adaptive Constraint Propagation 1 Rajeshwary Patel, 2 Swarndeep Saket 1 Student, 2 Assistant Professor 1 2 Department of Computer Engineering, 1 2 L. J. Institutes
Object Extraction Using Image Segmentation and Adaptive Constraint Propagation 1 Rajeshwary Patel, 2 Swarndeep Saket 1 Student, 2 Assistant Professor 1 2 Department of Computer Engineering, 1 2 L. J. Institutes
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Segmentation with non-linear constraints on appearance, complexity, and geometry
 IPAM February 2013 Western Univesity Segmentation with non-linear constraints on appearance, complexity, and geometry Yuri Boykov Andrew Delong Lena Gorelick Hossam Isack Anton Osokin Frank Schmidt Olga
IPAM February 2013 Western Univesity Segmentation with non-linear constraints on appearance, complexity, and geometry Yuri Boykov Andrew Delong Lena Gorelick Hossam Isack Anton Osokin Frank Schmidt Olga
Computer Vision I - Filtering and Feature detection
 Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
CS4670 / 5670: Computer Vision Noah Snavely
 { { 11/26/2013 CS4670 / 5670: Computer Vision Noah Snavely Graph-Based Image Segmentation Stereo as a minimization problem match cost Want each pixel to find a good match in the other image smoothness
{ { 11/26/2013 CS4670 / 5670: Computer Vision Noah Snavely Graph-Based Image Segmentation Stereo as a minimization problem match cost Want each pixel to find a good match in the other image smoothness
CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS
 CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS This chapter presents a computational model for perceptual organization. A figure-ground segregation network is proposed based on a novel boundary
CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS This chapter presents a computational model for perceptual organization. A figure-ground segregation network is proposed based on a novel boundary
Action recognition in videos
 Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
CAP5415-Computer Vision Lecture 13-Image/Video Segmentation Part II. Dr. Ulas Bagci
 CAP-Computer Vision Lecture -Image/Video Segmentation Part II Dr. Ulas Bagci bagci@ucf.edu Labeling & Segmentation Labeling is a common way for modeling various computer vision problems (e.g. optical flow,
CAP-Computer Vision Lecture -Image/Video Segmentation Part II Dr. Ulas Bagci bagci@ucf.edu Labeling & Segmentation Labeling is a common way for modeling various computer vision problems (e.g. optical flow,
Applications. Foreground / background segmentation Finding skin-colored regions. Finding the moving objects. Intelligent scissors
 Segmentation I Goal Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Applications Intelligent
Segmentation I Goal Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Applications Intelligent
Image Segmentation Using Iterated Graph Cuts BasedonMulti-scaleSmoothing
 Image Segmentation Using Iterated Graph Cuts BasedonMulti-scaleSmoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai,
Image Segmentation Using Iterated Graph Cuts BasedonMulti-scaleSmoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai,
VIDEO MATTING USING MOTION EXTENDED GRABCUT
 VIDEO MATTING USING MOTION EXTENDED GRABCUT David Corrigan 1, Simon Robinson 2 and Anil Kokaram 1 1 Sigmedia Group, Trinity College Dublin, Ireland. Email: {corrigad, akokaram}@tcd.ie 2 The Foundry, London,
VIDEO MATTING USING MOTION EXTENDED GRABCUT David Corrigan 1, Simon Robinson 2 and Anil Kokaram 1 1 Sigmedia Group, Trinity College Dublin, Ireland. Email: {corrigad, akokaram}@tcd.ie 2 The Foundry, London,
IMA Preprint Series # 2281
 DICTIONARY LEARNING AND SPARSE CODING FOR UNSUPERVISED CLUSTERING By Pablo Sprechmann and Guillermo Sapiro IMA Preprint Series # 2281 ( September 2009 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS UNIVERSITY
DICTIONARY LEARNING AND SPARSE CODING FOR UNSUPERVISED CLUSTERING By Pablo Sprechmann and Guillermo Sapiro IMA Preprint Series # 2281 ( September 2009 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS UNIVERSITY
Robust Model-Free Tracking of Non-Rigid Shape. Abstract
 Robust Model-Free Tracking of Non-Rigid Shape Lorenzo Torresani Stanford University ltorresa@cs.stanford.edu Christoph Bregler New York University chris.bregler@nyu.edu New York University CS TR2003-840
Robust Model-Free Tracking of Non-Rigid Shape Lorenzo Torresani Stanford University ltorresa@cs.stanford.edu Christoph Bregler New York University chris.bregler@nyu.edu New York University CS TR2003-840
Detecting and Identifying Moving Objects in Real-Time
 Chapter 9 Detecting and Identifying Moving Objects in Real-Time For surveillance applications or for human-computer interaction, the automated real-time tracking of moving objects in images from a stationary
Chapter 9 Detecting and Identifying Moving Objects in Real-Time For surveillance applications or for human-computer interaction, the automated real-time tracking of moving objects in images from a stationary
MRFs and Segmentation with Graph Cuts
 02/24/10 MRFs and Segmentation with Graph Cuts Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class Finish up EM MRFs w ij i Segmentation with Graph Cuts j EM Algorithm: Recap
02/24/10 MRFs and Segmentation with Graph Cuts Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class Finish up EM MRFs w ij i Segmentation with Graph Cuts j EM Algorithm: Recap
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Mixture Models and EM
 Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Full text available at: Image and Video Matting: A Survey
 Image and Video Matting: A Survey Image and Video Matting: A Survey Jue Wang Adobe Systems Incorporated 801 North 34th Street Seattle, WA 98103 USA juewang@adobe.com Michael F. Cohen Microsoft Research
Image and Video Matting: A Survey Image and Video Matting: A Survey Jue Wang Adobe Systems Incorporated 801 North 34th Street Seattle, WA 98103 USA juewang@adobe.com Michael F. Cohen Microsoft Research
Seam-Carving. Michael Rubinstein MIT. and Content-driven Retargeting of Images (and Video) Some slides borrowed from Ariel Shamir and Shai Avidan
 Some slides borrowed from Ariel Shamir and Shai Avidan") Seam-Carving and Content-driven Retargeting of Images (and Video) Michael Rubinstein MIT Some slides borrowed from Ariel Shamir and Shai Avidan Display Devices Content Retargeting PC iphone Page Layout
Seam-Carving and Content-driven Retargeting of Images (and Video) Michael Rubinstein MIT Some slides borrowed from Ariel Shamir and Shai Avidan Display Devices Content Retargeting PC iphone Page Layout
A Diffusion Approach to Seeded Image Segmentation
 A Diffusion Approach to Seeded Image Segmentation Juyong Zhang Jianmin Zheng Jianfei Cai Nanyang Technological University, Singapore S070051, asjmzheng, asjfcai@ntu.edu.sg Abstract Seeded image segmentation
A Diffusion Approach to Seeded Image Segmentation Juyong Zhang Jianmin Zheng Jianfei Cai Nanyang Technological University, Singapore S070051, asjmzheng, asjfcai@ntu.edu.sg Abstract Seeded image segmentation
Overview: motion estimation. Differential motion estimation
 Overview: motion estimation Differential methods Fast algorithms for Sub-pel accuracy Rate-constrained motion estimation Bernd Girod: EE368b Image Video Compression Motion Estimation no. 1 Differential
Overview: motion estimation Differential methods Fast algorithms for Sub-pel accuracy Rate-constrained motion estimation Bernd Girod: EE368b Image Video Compression Motion Estimation no. 1 Differential
Det De e t cting abnormal event n s Jaechul Kim
 Detecting abnormal events Jaechul Kim Purpose Introduce general methodologies used in abnormality detection Deal with technical details of selected papers Abnormal events Easy to verify, but hard to describe
Detecting abnormal events Jaechul Kim Purpose Introduce general methodologies used in abnormality detection Deal with technical details of selected papers Abnormal events Easy to verify, but hard to describe
Lab 9. Julia Janicki. Introduction
 Lab 9 Julia Janicki Introduction My goal for this project is to map a general land cover in the area of Alexandria in Egypt using supervised classification, specifically the Maximum Likelihood and Support
Lab 9 Julia Janicki Introduction My goal for this project is to map a general land cover in the area of Alexandria in Egypt using supervised classification, specifically the Maximum Likelihood and Support
Energy Minimization for Segmentation in Computer Vision
 S * = arg S min E(S) Energy Minimization for Segmentation in Computer Vision Meng Tang, Dmitrii Marin, Ismail Ben Ayed, Yuri Boykov Outline Clustering/segmentation methods K-means, GrabCut, Normalized
S * = arg S min E(S) Energy Minimization for Segmentation in Computer Vision Meng Tang, Dmitrii Marin, Ismail Ben Ayed, Yuri Boykov Outline Clustering/segmentation methods K-means, GrabCut, Normalized
Perceptual Grouping from Motion Cues Using Tensor Voting
 Perceptual Grouping from Motion Cues Using Tensor Voting 1. Research Team Project Leader: Graduate Students: Prof. Gérard Medioni, Computer Science Mircea Nicolescu, Changki Min 2. Statement of Project
Perceptual Grouping from Motion Cues Using Tensor Voting 1. Research Team Project Leader: Graduate Students: Prof. Gérard Medioni, Computer Science Mircea Nicolescu, Changki Min 2. Statement of Project
Segmentation. Separate image into coherent regions
 Segmentation II Segmentation Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Interactive
Segmentation II Segmentation Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Interactive
Computer Vision : Exercise 4 Labelling Problems
 Computer Vision Exercise 4 Labelling Problems 13/01/2014 Computer Vision : Exercise 4 Labelling Problems Outline 1. Energy Minimization (example segmentation) 2. Iterated Conditional Modes 3. Dynamic Programming
Computer Vision Exercise 4 Labelling Problems 13/01/2014 Computer Vision : Exercise 4 Labelling Problems Outline 1. Energy Minimization (example segmentation) 2. Iterated Conditional Modes 3. Dynamic Programming
Introduction to Medical Imaging (5XSA0) Module 5
 Module 5") Introduction to Medical Imaging (5XSA0) Module 5 Segmentation Jungong Han, Dirk Farin, Sveta Zinger ( s.zinger@tue.nl ) 1 Outline Introduction Color Segmentation region-growing region-merging watershed
Introduction to Medical Imaging (5XSA0) Module 5 Segmentation Jungong Han, Dirk Farin, Sveta Zinger ( s.zinger@tue.nl ) 1 Outline Introduction Color Segmentation region-growing region-merging watershed