EE795: Computer Vision and Intelligent Systems
|
|
|
- Walter Carpenter
- 5 years ago
- Views:
Transcription
1 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture
2 2 Outline Basics Image Formation Image Processing
3 3 Intelligent Systems Intelligence The capacity to acquire knowledge The faculty of thought and reason System A group of interacting, interrelated or interdependent elements forming a complex whole This class uses computer vision to give a system intelligence The systems should perceive, reason, learn, and act intelligently
4 4 Vision Signal to symbol transformation Input: Signals Vision Output: Symbols
5 5 Image Processing Manipulation of images Input: Image Image Processing Output: Image Examples: Photoshopping Image enhancement Noise filtering Image compression



6 IP Examples 6
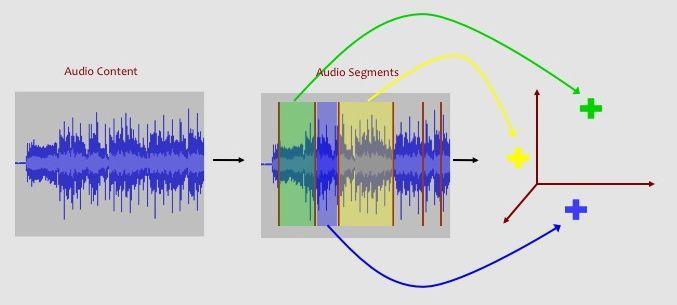
7 7 Pattern Recognition Assignment of a label to input value Input: Measurement vector Pattern Recognition Output: Label ( Classification ) Examples: Classification (1/0) Regression (real valued) Labeling (multi label)

8 PR Examples 8
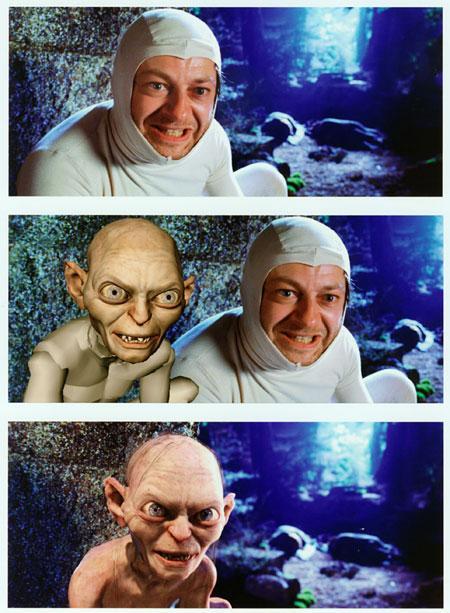
9 9 Computer Graphics Create realistic images ( forward problem ) Input: Mathematical model of objects and events Computer Graphics Output: Images ( synthesized ) Examples: Simulation (flight, driving) Virtual tours Video games Movies



10 CG Examples 10
11 11 Computer Vision Interpretation and understanding of images Input: 1. Image derived measurements 2. Models (prior knowledge) Computer Vision Examples: Object recognition Face recognition Lane detection Activity analysis Output: Recognition of objects and events embedded in images and video ( Semantic level classification)
12 12 Geometric Primitives Building blocks for description of 3D shapes Points Lines Planes Curves Surfaces Volumes
13 13 Points 2D pixel coordinates in an image x = x y 3D point in real world X X = Y Z Homogenous coordinates Concatenate an extra term (usually 1) to point x x = y 1 for 2D
14 14 2D Lines and 3D Planes 2D lines l = a, b, c Normalized line l = n x, n y, d = n, d, n = 1 n - normal vector to line d distance to origin Line equation x l = ax + by + c = 0 3D plane is extension of 2D line m = a, b, c, d
15 15 2D Transformations Translation x = I t x I identity matrix Rotation + translation x = R t x cos (θ) sin (θ) sin (θ) cos (θ)
16 16 Image Formation Incoming light energy is focused and collected onto an image plane
17 17 Pinhole Camera Model Simple idealized model for image formation Gives mathematical relationship between 3D world coordinates and 2D image plane coordinates
18 18 Image as Function Think of an image as a function, f, that maps from R 2 to R 0 < f x, y < is the intensity at a point (x, y) In reality, an image is defined over a rectangle with a finite range of values f: a, b c, d [0,1] Computationally, [0,1] range is convenient but usually we have an 8-bit quantized representation 0 < f x, y < 255 Color image is just three separate functions pasted together f x, y = [r x, y ; g x, y ; b x, y ]


19 19 Image as Function Multiple equivalent representations Surface Image Matrix
20 20 Matrix Notation Mathematical Notation starts with f(0,0) Matlab Notation starts with I(1,1) No zero indexing 0 0 N 1 y 1 1 N x M 1 x M y (3,4) I(4,3)

21 21 Sampling and Quantization Sampling gives fixed grid of image Quantization gives the number of output levels L
22 22 Quantization L = number of output levels k = number of bits per pixel Output range of image 0, L 1 = [0, 2 k ] Image storage size b = M N k Number of bits to store image with dimensions M N


23 23 Resolution Spatial resolution is the smallest discernible detail in an image This is controlled by the sampling factor (the size M N of the CMOS sensor) Gray-level resolution is the smallest discernible change in gray level Based on number of bits for representation
24 24 Pixel Neighborhood The pixel neighborhood corresponds to nearby pixels 4-neighbors Horizontal and vertical neighbors 8-neighbors Include 4-neighbors and the diagonal pixels
25 25 Connectivity Path exists between pixels 4-connected 8-connected
26 26 Image Processing Usually the first stage of computer vision applications Pre-process an image to ensure it is in a suitable form for further analysis Typical operations include: Exposure correction, color balancing, reduction in image noise, increasing sharpness, rotation of an image to straighten Digital Image Processing by Gonzalez and Woods is a great book to learn more
27 27 2D Signal Processing Image processing is an extension of signal processing to two independent variables Input signal, output signal General system x f y Image processing f(x, y) w g(x, y)
28 28 Point Operators/Processes Output pixel value only depends on the corresponding input pixel value Often times we will see operations like dividing one image by another Matrix division is not defined The operation is carried out between corresponding pixels in the two image Element-by-element dot operation in Matlab >> I3 = I1./I2 Where I1 and I2 are the same size
29 29 Pixel Transforms Gain and bias (Multiplication and addition of constant) g x, y = a(x, y)f x, y + b(x, y) a (gain) controls contrast b (bias) controls brightness Notice parameters can vary spatially (think gradients) Linear blend g x = 1 α f 0 x + αf 1 (x) We will see this used later for motion detection in video processing
30 30 Color Transforms Usually we think of a color image as three images concatenated together Have a red, green, blue slice corresponding to the notion of primary colors Manipulations of these color channels may not correspond directly with desired perceptual response Adding bias to all channels may actually change the apparent color instead of increasing brightness Need other representations of color for mathematical manipulation We will see more about color later


31 31 Compositing and Matting Techniques to remove an object and place it in a new scene E.g. blue screen Matting extracting an object from an original image Compositing inserting object into another image (without visible artifacts) A fourth alpha channel is added to an RGB image α describes the opacity (opposite of transparency) of a pixel Over operator C = 1 α B + αf
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Lecture 01 Introduction http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Computer Vision
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Lecture 01 Introduction http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Computer Vision
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Lecture 2 Image Processing and Filtering
 Lecture 2 Image Processing and Filtering UW CSE vision faculty What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations
Lecture 2 Image Processing and Filtering UW CSE vision faculty What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Motivation. Gray Levels
 Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
1/12/2009. Image Elements (Pixels) Image Elements (Pixels) Digital Image. Digital Image =...
 Image Elements (Pixels) Digital Image. Digital Image =...") PAM3012 Digital Image Processing for Radiographers Image Sampling & Quantization In this lecture Definitions of Spatial l & Gray-level l resolution Perceived Image Quality & Resolution Aliasing & Moire
PAM3012 Digital Image Processing for Radiographers Image Sampling & Quantization In this lecture Definitions of Spatial l & Gray-level l resolution Perceived Image Quality & Resolution Aliasing & Moire
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Computer Vision I - Basics of Image Processing Part 1
 Computer Vision I - Basics of Image Processing Part 1 Carsten Rother 28/10/2014 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing 28/10/2014 2
Computer Vision I - Basics of Image Processing Part 1 Carsten Rother 28/10/2014 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing 28/10/2014 2
Introduction to Homogeneous coordinates
 Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Ulrik Söderström 17 Jan Image Processing. Introduction
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 17 Jan 2017 Image Processing Introduction Image Processsing Typical goals: Improve images for human interpretation Image processing Processing of images for
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 17 Jan 2017 Image Processing Introduction Image Processsing Typical goals: Improve images for human interpretation Image processing Processing of images for
Motivation. Intensity Levels
 Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Digital Image Processing. Introduction
 Digital Image Processing Introduction Digital Image Definition An image can be defined as a twodimensional function f(x,y) x,y: Spatial coordinate F: the amplitude of any pair of coordinate x,y, which
Digital Image Processing Introduction Digital Image Definition An image can be defined as a twodimensional function f(x,y) x,y: Spatial coordinate F: the amplitude of any pair of coordinate x,y, which
3D graphics, raster and colors CS312 Fall 2010
 Computer Graphics 3D graphics, raster and colors CS312 Fall 2010 Shift in CG Application Markets 1989-2000 2000 1989 3D Graphics Object description 3D graphics model Visualization 2D projection that simulates
Computer Graphics 3D graphics, raster and colors CS312 Fall 2010 Shift in CG Application Markets 1989-2000 2000 1989 3D Graphics Object description 3D graphics model Visualization 2D projection that simulates
Computer Vision. The image formation process
 Computer Vision The image formation process Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 The image
Computer Vision The image formation process Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 The image
Digital Image Fundamentals II
 Digital Image Fundamentals II 1. Image modeling and representations 2. Pixels and Pixel relations 3. Arithmetic operations of images 4. Image geometry operation 5. Image processing with Matlab - Image
Digital Image Fundamentals II 1. Image modeling and representations 2. Pixels and Pixel relations 3. Arithmetic operations of images 4. Image geometry operation 5. Image processing with Matlab - Image
Homework #1. Displays, Alpha Compositing, Image Processing, Affine Transformations, Hierarchical Modeling
 Computer Graphics Instructor: Brian Curless CSE 457 Spring 2014 Homework #1 Displays, Alpha Compositing, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Saturday, April th Due:
Computer Graphics Instructor: Brian Curless CSE 457 Spring 2014 Homework #1 Displays, Alpha Compositing, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Saturday, April th Due:
(Refer Slide Time 00:17) Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)
 Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)") Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Project report Augmented reality with ARToolKit
 Project report Augmented reality with ARToolKit FMA175 Image Analysis, Project Mathematical Sciences, Lund Institute of Technology Supervisor: Petter Strandmark Fredrik Larsson (dt07fl2@student.lth.se)
Project report Augmented reality with ARToolKit FMA175 Image Analysis, Project Mathematical Sciences, Lund Institute of Technology Supervisor: Petter Strandmark Fredrik Larsson (dt07fl2@student.lth.se)
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations I
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations I For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations I For students of HI 5323
Image Processing. CSCI 420 Computer Graphics Lecture 22
 CSCI 42 Computer Graphics Lecture 22 Image Processing Blending Display Color Models Filters Dithering [Ch 7.13, 8.11-8.12] Jernej Barbic University of Southern California 1 Alpha Channel Frame buffer Simple
CSCI 42 Computer Graphics Lecture 22 Image Processing Blending Display Color Models Filters Dithering [Ch 7.13, 8.11-8.12] Jernej Barbic University of Southern California 1 Alpha Channel Frame buffer Simple
Image Processing. Alpha Channel. Blending. Image Compositing. Blending Errors. Blending in OpenGL
 CSCI 42 Computer Graphics Lecture 22 Image Processing Blending Display Color Models Filters Dithering [Ch 6, 7] Jernej Barbic University of Southern California Alpha Channel Frame buffer Simple color model:
CSCI 42 Computer Graphics Lecture 22 Image Processing Blending Display Color Models Filters Dithering [Ch 6, 7] Jernej Barbic University of Southern California Alpha Channel Frame buffer Simple color model:
Filtering and Enhancing Images
 KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
Histograms. h(r k ) = n k. p(r k )= n k /NM. Histogram: number of times intensity level rk appears in the image
 = n k. p(r k )= n k /NM. Histogram: number of times intensity level rk appears in the image") Histograms h(r k ) = n k Histogram: number of times intensity level rk appears in the image p(r k )= n k /NM normalized histogram also a probability of occurence 1 Histogram of Image Intensities Create
Histograms h(r k ) = n k Histogram: number of times intensity level rk appears in the image p(r k )= n k /NM normalized histogram also a probability of occurence 1 Histogram of Image Intensities Create
Computer Graphics. Instructor: Oren Kapah. Office Hours: T.B.A.
 Computer Graphics Instructor: Oren Kapah (orenkapahbiu@gmail.com) Office Hours: T.B.A. The CG-IDC slides for this course were created by Toky & Hagit Hel-Or 1 CG-IDC 2 Exercise and Homework The exercise
Computer Graphics Instructor: Oren Kapah (orenkapahbiu@gmail.com) Office Hours: T.B.A. The CG-IDC slides for this course were created by Toky & Hagit Hel-Or 1 CG-IDC 2 Exercise and Homework The exercise
Chapter 18. Geometric Operations
 Chapter 18 Geometric Operations To this point, the image processing operations have computed the gray value (digital count) of the output image pixel based on the gray values of one or more input pixels;
Chapter 18 Geometric Operations To this point, the image processing operations have computed the gray value (digital count) of the output image pixel based on the gray values of one or more input pixels;
Lecture 4: Spatial Domain Transformations
 # Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
# Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Motion. 1 Introduction. 2 Optical Flow. Sohaib A Khan. 2.1 Brightness Constancy Equation
 Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Binocular Stereo Vision. System 6 Introduction Is there a Wedge in this 3D scene?
 System 6 Introduction Is there a Wedge in this 3D scene? Binocular Stereo Vision Data a stereo pair of images! Given two 2D images of an object, how can we reconstruct 3D awareness of it? AV: 3D recognition
System 6 Introduction Is there a Wedge in this 3D scene? Binocular Stereo Vision Data a stereo pair of images! Given two 2D images of an object, how can we reconstruct 3D awareness of it? AV: 3D recognition
Image Processing. Bilkent University. CS554 Computer Vision Pinar Duygulu
 Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
Analysis of Image and Video Using Color, Texture and Shape Features for Object Identification
 IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727, Volume 16, Issue 6, Ver. VI (Nov Dec. 2014), PP 29-33 Analysis of Image and Video Using Color, Texture and Shape Features
IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727, Volume 16, Issue 6, Ver. VI (Nov Dec. 2014), PP 29-33 Analysis of Image and Video Using Color, Texture and Shape Features
Dense Image-based Motion Estimation Algorithms & Optical Flow
 Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Lecture #13. Point (pixel) transformations. Neighborhood processing. Color segmentation
 transformations. Neighborhood processing. Color segmentation") Lecture #13 Point (pixel) transformations Color modification Color slicing Device independent color Color balancing Neighborhood processing Smoothing Sharpening Color segmentation Color Transformations
Lecture #13 Point (pixel) transformations Color modification Color slicing Device independent color Color balancing Neighborhood processing Smoothing Sharpening Color segmentation Color Transformations
Topics to be Covered in the Rest of the Semester. CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester
 Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
CS 231A Computer Vision (Autumn 2012) Problem Set 1
 Problem Set 1") CS 231A Computer Vision (Autumn 2012) Problem Set 1 Due: Oct. 9 th, 2012 (2:15 pm) 1 Finding an Approximate Image asis EigenFaces (25 points) In this problem you will implement a solution to a facial recognition
CS 231A Computer Vision (Autumn 2012) Problem Set 1 Due: Oct. 9 th, 2012 (2:15 pm) 1 Finding an Approximate Image asis EigenFaces (25 points) In this problem you will implement a solution to a facial recognition
Babu Madhav Institute of Information Technology Years Integrated M.Sc.(IT)(Semester - 7)
(Semester - 7)") 5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
3. (a) Prove any four properties of 2D Fourier Transform. (b) Determine the kernel coefficients of 2D Hadamard transforms for N=8.
 Prove any four properties of 2D Fourier Transform. (b) Determine the kernel coefficients of 2D Hadamard transforms for N=8.") Set No.1 1. (a) What are the applications of Digital Image Processing? Explain how a digital image is formed? (b) Explain with a block diagram about various steps in Digital Image Processing. [6+10] 2.
Set No.1 1. (a) What are the applications of Digital Image Processing? Explain how a digital image is formed? (b) Explain with a block diagram about various steps in Digital Image Processing. [6+10] 2.
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Homework #1. Displays, Image Processing, Affine Transformations, Hierarchical Modeling
 Computer Graphics Instructor: Brian Curless CSE 457 Spring 215 Homework #1 Displays, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Thursday, April 9 th Due: Thursday, April
Computer Graphics Instructor: Brian Curless CSE 457 Spring 215 Homework #1 Displays, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Thursday, April 9 th Due: Thursday, April
Homework #1. Displays, Image Processing, Affine Transformations, Hierarchical Modeling
 Computer Graphics Instructor: Brian Curless CSE 457 Spring 217 Homework #1 Displays, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Friday, April 7 th Due: Thursday, April 2
Computer Graphics Instructor: Brian Curless CSE 457 Spring 217 Homework #1 Displays, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Friday, April 7 th Due: Thursday, April 2
Image warping , , Computational Photography Fall 2017, Lecture 10
 Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
COMPUTER VISION > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE
 COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
INTRODUCTION TO IMAGE PROCESSING (COMPUTER VISION)
") INTRODUCTION TO IMAGE PROCESSING (COMPUTER VISION) Revision: 1.4, dated: November 10, 2005 Tomáš Svoboda Czech Technical University, Faculty of Electrical Engineering Center for Machine Perception, Prague,
INTRODUCTION TO IMAGE PROCESSING (COMPUTER VISION) Revision: 1.4, dated: November 10, 2005 Tomáš Svoboda Czech Technical University, Faculty of Electrical Engineering Center for Machine Perception, Prague,
ECE 470: Homework 5. Due Tuesday, October 27 in Seth Hutchinson. Luke A. Wendt
 ECE 47: Homework 5 Due Tuesday, October 7 in class @:3pm Seth Hutchinson Luke A Wendt ECE 47 : Homework 5 Consider a camera with focal length λ = Suppose the optical axis of the camera is aligned with
ECE 47: Homework 5 Due Tuesday, October 7 in class @:3pm Seth Hutchinson Luke A Wendt ECE 47 : Homework 5 Consider a camera with focal length λ = Suppose the optical axis of the camera is aligned with
Statistical image models
 Chapter 4 Statistical image models 4. Introduction 4.. Visual worlds Figure 4. shows images that belong to different visual worlds. The first world (fig. 4..a) is the world of white noise. It is the world
Chapter 4 Statistical image models 4. Introduction 4.. Visual worlds Figure 4. shows images that belong to different visual worlds. The first world (fig. 4..a) is the world of white noise. It is the world
Color and Shading. Color. Shapiro and Stockman, Chapter 6. Color and Machine Vision. Color and Perception
 Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
UNIT-2 IMAGE REPRESENTATION IMAGE REPRESENTATION IMAGE SENSORS IMAGE SENSORS- FLEX CIRCUIT ASSEMBLY
 18-08-2016 UNIT-2 In the following slides we will consider what is involved in capturing a digital image of a real-world scene Image sensing and representation Image Acquisition Sampling and quantisation
18-08-2016 UNIT-2 In the following slides we will consider what is involved in capturing a digital image of a real-world scene Image sensing and representation Image Acquisition Sampling and quantisation
Homework #1. Displays, Image Processing, Affine Transformations, Hierarchical modeling, Projections
 Computer Graphics Instructor: rian Curless CSEP 557 Winter 213 Homework #1 Displays, Image Processing, Affine Transformations, Hierarchical modeling, Projections Assigned: Tuesday, January 22 nd Due: Tuesday,
Computer Graphics Instructor: rian Curless CSEP 557 Winter 213 Homework #1 Displays, Image Processing, Affine Transformations, Hierarchical modeling, Projections Assigned: Tuesday, January 22 nd Due: Tuesday,
Experiments with Edge Detection using One-dimensional Surface Fitting
 Experiments with Edge Detection using One-dimensional Surface Fitting Gabor Terei, Jorge Luis Nunes e Silva Brito The Ohio State University, Department of Geodetic Science and Surveying 1958 Neil Avenue,
Experiments with Edge Detection using One-dimensional Surface Fitting Gabor Terei, Jorge Luis Nunes e Silva Brito The Ohio State University, Department of Geodetic Science and Surveying 1958 Neil Avenue,
Display. Introduction page 67 2D Images page 68. All Orientations page 69 Single Image page 70 3D Images page 71
 Display Introduction page 67 2D Images page 68 All Orientations page 69 Single Image page 70 3D Images page 71 Intersecting Sections page 71 Cube Sections page 72 Render page 73 1. Tissue Maps page 77
Display Introduction page 67 2D Images page 68 All Orientations page 69 Single Image page 70 3D Images page 71 Intersecting Sections page 71 Cube Sections page 72 Render page 73 1. Tissue Maps page 77
VC 16/17 TP5 Single Pixel Manipulation
 VC 16/17 TP5 Single Pixel Manipulation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Dynamic Range Manipulation
VC 16/17 TP5 Single Pixel Manipulation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Dynamic Range Manipulation
Digital Image Fundamentals. Prof. George Wolberg Dept. of Computer Science City College of New York
 Digital Image Fundamentals Prof. George Wolberg Dept. of Computer Science City College of New York Objectives In this lecture we discuss: - Image acquisition - Sampling and quantization - Spatial and graylevel
Digital Image Fundamentals Prof. George Wolberg Dept. of Computer Science City College of New York Objectives In this lecture we discuss: - Image acquisition - Sampling and quantization - Spatial and graylevel
Programming Fundamentals
 Programming Fundamentals Lecture 03 Introduction to Löve 2D Edirlei Soares de Lima Computer Graphics Concepts What is a pixel? In digital imaging, a pixel is a single
Programming Fundamentals Lecture 03 Introduction to Löve 2D Edirlei Soares de Lima Computer Graphics Concepts What is a pixel? In digital imaging, a pixel is a single
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
CP467 Image Processing and Pattern Recognition
 CP467 Image Processing and Pattern Recognition Instructor: Hongbing Fan Introduction About DIP & PR About this course Lecture 1: an overview of DIP DIP&PR show What is Digital Image? We use digital image
CP467 Image Processing and Pattern Recognition Instructor: Hongbing Fan Introduction About DIP & PR About this course Lecture 1: an overview of DIP DIP&PR show What is Digital Image? We use digital image
An Automated Image-based Method for Multi-Leaf Collimator Positioning Verification in Intensity Modulated Radiation Therapy
 An Automated Image-based Method for Multi-Leaf Collimator Positioning Verification in Intensity Modulated Radiation Therapy Chenyang Xu 1, Siemens Corporate Research, Inc., Princeton, NJ, USA Xiaolei Huang,
An Automated Image-based Method for Multi-Leaf Collimator Positioning Verification in Intensity Modulated Radiation Therapy Chenyang Xu 1, Siemens Corporate Research, Inc., Princeton, NJ, USA Xiaolei Huang,
Sampling and Reconstruction
 Sampling and Reconstruction Sampling and Reconstruction Sampling and Spatial Resolution Spatial Aliasing Problem: Spatial aliasing is insufficient sampling of data along the space axis, which occurs because
Sampling and Reconstruction Sampling and Reconstruction Sampling and Spatial Resolution Spatial Aliasing Problem: Spatial aliasing is insufficient sampling of data along the space axis, which occurs because
Visualizing Images. Lecture 2: Intensity Surfaces and Gradients. Images as Surfaces. Bridging the Gap. Examples. Examples
 Visualizing Images Recall two ways of visualizing an image Lecture : Intensity Surfaces and Gradients Intensity pattern d array of numbers We see it at this level Computer works at this level Bridging
Visualizing Images Recall two ways of visualizing an image Lecture : Intensity Surfaces and Gradients Intensity pattern d array of numbers We see it at this level Computer works at this level Bridging
COMPUTER VISION. Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai
 COMPUTER VISION Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai 600036. Email: sdas@iitm.ac.in URL: //www.cs.iitm.ernet.in/~sdas 1 INTRODUCTION 2 Human Vision System (HVS) Vs.
COMPUTER VISION Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai 600036. Email: sdas@iitm.ac.in URL: //www.cs.iitm.ernet.in/~sdas 1 INTRODUCTION 2 Human Vision System (HVS) Vs.
3D Rendering Pipeline
 3D Rendering Pipeline Reference: Real-Time Rendering 3 rd Edition Chapters 2 4 OpenGL SuperBible 6 th Edition Overview Rendering Pipeline Modern CG Inside a Desktop Architecture Shaders Tool Stage Asset
3D Rendering Pipeline Reference: Real-Time Rendering 3 rd Edition Chapters 2 4 OpenGL SuperBible 6 th Edition Overview Rendering Pipeline Modern CG Inside a Desktop Architecture Shaders Tool Stage Asset
Local Image preprocessing (cont d)
") Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
Noise Model. Important Noise Probability Density Functions (Cont.) Important Noise Probability Density Functions
 Important Noise Probability Density Functions") Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
Introduction to Computer Vision. Week 3, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective
Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective
Digital Image Processing
 Digital Image Processing Lecture # 4 Digital Image Fundamentals - II ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Presentation Outline
Digital Image Processing Lecture # 4 Digital Image Fundamentals - II ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Presentation Outline
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
3D GRAPHICS. design. animate. render
 3D GRAPHICS design animate render 3D animation movies Computer Graphics Special effects Computer Graphics Advertising Computer Graphics Games Computer Graphics Simulations & serious games Computer Graphics
3D GRAPHICS design animate render 3D animation movies Computer Graphics Special effects Computer Graphics Advertising Computer Graphics Games Computer Graphics Simulations & serious games Computer Graphics
Computer Graphics: Viewing in 3-D. Course Website:
 Computer Graphics: Viewing in 3-D Course Website: http://www.comp.dit.ie/bmacnamee 2 Contents Transformations in 3-D How do transformations in 3-D work? 3-D homogeneous coordinates and matrix based transformations
Computer Graphics: Viewing in 3-D Course Website: http://www.comp.dit.ie/bmacnamee 2 Contents Transformations in 3-D How do transformations in 3-D work? 3-D homogeneous coordinates and matrix based transformations
The. Handbook ijthbdition. John C. Russ. North Carolina State University Materials Science and Engineering Department Raleigh, North Carolina
 The IMAGE PROCESSING Handbook ijthbdition John C. Russ North Carolina State University Materials Science and Engineering Department Raleigh, North Carolina (cp ) Taylor &. Francis \V J Taylor SiFrancis
The IMAGE PROCESSING Handbook ijthbdition John C. Russ North Carolina State University Materials Science and Engineering Department Raleigh, North Carolina (cp ) Taylor &. Francis \V J Taylor SiFrancis
Digital Images. Kyungim Baek. Department of Information and Computer Sciences. ICS 101 (November 1, 2016) Digital Images 1
 Digital Images 1") Digital Images Kyungim Baek Department of Information and Computer Sciences ICS 101 (November 1, 2016) Digital Images 1 iclicker Question I know a lot about how digital images are represented, stored,
Digital Images Kyungim Baek Department of Information and Computer Sciences ICS 101 (November 1, 2016) Digital Images 1 iclicker Question I know a lot about how digital images are represented, stored,
Types of Edges. Why Edge Detection? Types of Edges. Edge Detection. Gradient. Edge Detection
 Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Robert Collins CSE486, Penn State. Lecture 2: Intensity Surfaces and Gradients
 Lecture 2: Intensity Surfaces and Gradients Visualizing Images Recall two ways of visualizing an image Intensity pattern 2d array of numbers We see it at this level Computer works at this level Bridging
Lecture 2: Intensity Surfaces and Gradients Visualizing Images Recall two ways of visualizing an image Intensity pattern 2d array of numbers We see it at this level Computer works at this level Bridging
Graphics Pipeline 2D Geometric Transformations
 Graphics Pipeline 2D Geometric Transformations CS 4620 Lecture 8 1 Plane projection in drawing Albrecht Dürer 2 Plane projection in drawing source unknown 3 Rasterizing triangles Summary 1 evaluation of
Graphics Pipeline 2D Geometric Transformations CS 4620 Lecture 8 1 Plane projection in drawing Albrecht Dürer 2 Plane projection in drawing source unknown 3 Rasterizing triangles Summary 1 evaluation of
PSD2B Digital Image Processing. Unit I -V
 PSD2B Digital Image Processing Unit I -V Syllabus- Unit 1 Introduction Steps in Image Processing Image Acquisition Representation Sampling & Quantization Relationship between pixels Color Models Basics
PSD2B Digital Image Processing Unit I -V Syllabus- Unit 1 Introduction Steps in Image Processing Image Acquisition Representation Sampling & Quantization Relationship between pixels Color Models Basics
Laser sensors. Transmitter. Receiver. Basilio Bona ROBOTICA 03CFIOR
 Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Computer Science 426 Midterm 3/11/04, 1:30PM-2:50PM
 NAME: Login name: Computer Science 46 Midterm 3//4, :3PM-:5PM This test is 5 questions, of equal weight. Do all of your work on these pages (use the back for scratch space), giving the answer in the space
NAME: Login name: Computer Science 46 Midterm 3//4, :3PM-:5PM This test is 5 questions, of equal weight. Do all of your work on these pages (use the back for scratch space), giving the answer in the space
Sculpting 3D Models. Glossary
 A Array An array clones copies of an object in a pattern, such as in rows and columns, or in a circle. Each object in an array can be transformed individually. Array Flyout Array flyout is available in
A Array An array clones copies of an object in a pattern, such as in rows and columns, or in a circle. Each object in an array can be transformed individually. Array Flyout Array flyout is available in
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Constructing System Matrices for SPECT Simulations and Reconstructions
 Constructing System Matrices for SPECT Simulations and Reconstructions Nirantha Balagopal April 28th, 2017 M.S. Report The University of Arizona College of Optical Sciences 1 Acknowledgement I would like
Constructing System Matrices for SPECT Simulations and Reconstructions Nirantha Balagopal April 28th, 2017 M.S. Report The University of Arizona College of Optical Sciences 1 Acknowledgement I would like
Assignment #2. (Due date: 11/6/2012)
") Computer Vision I CSE 252a, Fall 2012 David Kriegman Assignment #2 (Due date: 11/6/2012) Name: Student ID: Email: Problem 1 [1 pts] Calculate the number of steradians contained in a spherical wedge with
Computer Vision I CSE 252a, Fall 2012 David Kriegman Assignment #2 (Due date: 11/6/2012) Name: Student ID: Email: Problem 1 [1 pts] Calculate the number of steradians contained in a spherical wedge with
Ray Tracer Due date: April 27, 2011
 Computer graphics Assignment 4 1 Overview Ray Tracer Due date: April 27, 2011 In this assignment you will implement the camera and several primitive objects for a ray tracer, and a basic ray tracing algorithm.
Computer graphics Assignment 4 1 Overview Ray Tracer Due date: April 27, 2011 In this assignment you will implement the camera and several primitive objects for a ray tracer, and a basic ray tracing algorithm.
Hand-Eye Calibration from Image Derivatives
 Hand-Eye Calibration from Image Derivatives Abstract In this paper it is shown how to perform hand-eye calibration using only the normal flow field and knowledge about the motion of the hand. The proposed
Hand-Eye Calibration from Image Derivatives Abstract In this paper it is shown how to perform hand-eye calibration using only the normal flow field and knowledge about the motion of the hand. The proposed
Robert Collins CSE598G. Intro to Template Matching and the Lucas-Kanade Method
 Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Image Processing using LabVIEW. By, Sandip Nair sandipnair.hpage.com
 Image Processing using LabVIEW By, Sandip Nair sandipnair06@yahoomail.com sandipnair.hpage.com What is image? An image is two dimensional function, f(x,y), where x and y are spatial coordinates, and the
Image Processing using LabVIEW By, Sandip Nair sandipnair06@yahoomail.com sandipnair.hpage.com What is image? An image is two dimensional function, f(x,y), where x and y are spatial coordinates, and the
Computer Vision. Coordinates. Prof. Flávio Cardeal DECOM / CEFET- MG.
 Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
An introduction to 3D image reconstruction and understanding concepts and ideas
 Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Digital Image Processing. Lecture # 3 Image Enhancement
 Digital Image Processing Lecture # 3 Image Enhancement 1 Image Enhancement Image Enhancement 3 Image Enhancement 4 Image Enhancement Process an image so that the result is more suitable than the original
Digital Image Processing Lecture # 3 Image Enhancement 1 Image Enhancement Image Enhancement 3 Image Enhancement 4 Image Enhancement Process an image so that the result is more suitable than the original
Motion in 2D image sequences
 Motion in 2D image sequences Definitely used in human vision Object detection and tracking Navigation and obstacle avoidance Analysis of actions or activities Segmentation and understanding of video sequences
Motion in 2D image sequences Definitely used in human vision Object detection and tracking Navigation and obstacle avoidance Analysis of actions or activities Segmentation and understanding of video sequences
Complex Sensors: Cameras, Visual Sensing. The Robotics Primer (Ch. 9) ECE 497: Introduction to Mobile Robotics -Visual Sensors
 ECE 497: Introduction to Mobile Robotics -Visual Sensors") Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual