Scene Grammars, Factor Graphs, and Belief Propagation
|
|
|
- Merilyn Palmer
- 5 years ago
- Views:
Transcription
1 Scene Grammars, Factor Graphs, and Belief Propagation Pedro Felzenszwalb Brown University Joint work with Jeroen Chua
2 Probabilistic Scene Grammars General purpose framework for image understanding and machine perception. What are the objects in the scene, and how are they related? Objects have parts that are (recursively) objects. Relationships provide context for recognition. Relationships are captured by compositional rules.
3 Example: Image Restoration Clean image x Measured image y = x + n. Ambiguous problem. Impossible to restore a pixel by itself. Context is of key importance. Requires modeling relationships between pixels.

4 Example: Object Recognition

5 Example: Object Recognition Context is of key importance. Requires modeling relationships between objects.
6 Vision as Bayesian Inference The goal is to recover information about the world from an image. Hidden variables X (the world/scene). Observations Y (the image). Consider the posterior distribution and Bayes Rule p(x Y ) = p(y X )p(x ) p(y ) The approach involves an imaging model p(y X ) And a prior distribution p(x )
7 Modeling scenes p(x ) Scenes are complex high-dimensional structures. The number of possible scenes is very large (infinite), yet scenes have regularities. Faces have eyes. Boundaries of objects are piecewise smooth. The set of regular scenes forms a Language. Scenes can be generate using stochastic grammars.
8 The Framework Representation: Probabilistic scene grammar. Transformation: Grammar model to factor graph. Inference: Loopy belief propagation. Learning: Maximum likelihood (EM).
9 Scene Grammar Scenes are structures generated by a stochastic grammar. Scenes are composed of objects of several types. Objects are composed of parts that are (recursively) objects. Parts tend to be in certain relative locations. The parts that make up an object can vary.
10 Scene Grammar Finite set of symbols (object types) Σ. Finite pose space Ω for each symbol. Finite set of productions R. A 0 {A 1,..., A K } A i Σ Rule selection probabilities p(r). Conditional pose distributions associated with each rule. p i (ω i ω 0 ) Self-rooting probabilities ɛ A.
11 Generating a scene Set of building blocks, or bricks, (A, ω) Σ Ω. Brick (A, ω) is on if the scene has an object of type A in pose ω. Stochastic process: Initially all bricks are off. Independently turn each brick (A, ω) on with probability ɛ A. The first time a brick is turned on, expand it. Expanding (A, ω): Select a rule A {A 1,..., A K }. Select K poses (ω 1,...,ω K ) conditional on ω. Turn on bricks (A 1, ω 1 ),..., (A K, ω K ).
12 A grammar for scenes with faces Symbols Σ = {FACE, EYE, NOSE, MOUTH}. Poses space Ω = {(x, y, size)}. Rules: (1) FACE {EYE, EYE, NOSE, MOUTH} (2) EYE {} (3) NOSE {} (4) MOUTH {} Conditional pose distributions for (1) specify typical locations of face parts within a face. Each symbol has a small self rooting probability.
13 Random scenes with face model
14 A grammar for images with curves Symbols Σ = {C, P}. Pose of C specifies position and orientation. Pose of P specifies position. Rules: (1) C(x, y, θ) {P(x, y)} (2) C(x, y, θ) {P(x, y), C(x + x θ, y + y θ, θ)} (3) C(x, y, θ) {C(x, y, θ + 1)} (4) C(x, y, θ) {C(x, y, θ 1)} (5) P {}
15 Random images
16 Computation Grammar defines a distribution over scenes. A key problem is computing conditional probabilities. What is the probability that there is a nose near location (20, 32) given that there is an eye at location (15, 29)? What is the probability that each pixel in the clean image is on, given the noisy observations?
17 Factor Graphs A factor graph represents a factored distribution. p(x 1, X 2, X 3, X 4 ) = f 1 (X 1, X 2 )f 2 (X 2, X 3, X 4 )f 3 (X 3, X 4 ) Variable nodes (circles) Factor nodes (squares)
18 Factor Graph Representation for Scenes Gadget represents a brick Binary random variables X brick on/off R i rule selection C i child selection Factors f 1 Leaky-or f 2 Selection f 3 Selection f D Data model
19 Σ = {A, B}. Ω = {1, 2}. A(x) B(y) B(x) {}. A(1) Ψ L X Ψ S R Ψ S C C B(1) Ψ L X Ψ S R Ψ S A(2) Ψ L X Ψ S R Ψ S C C B(2) Ψ L X Ψ S R Ψ S
20 Loopy belief propagation Inference by message passing. µ f v (x v ) = Ψ(x N(f ) ) x N(f )\v u N(f ) µ u f (x u ) In general message computation is exponential in degree of factors. For our factors, message computation is linear in degree.
21 Conditional inference with LBP Σ = {FACE, EYE, NOSE, MOUTH} FACE {EYE, EYE, NOSE, MOUTH} Marginal probabilities conditional on one eye. Face Eye Nose Mouth Marginal probabilities conditional on two eyes. Face Eye Nose Mouth
22 Conditional inference with LBP Evidence for an object provides context for other objects. LBP combines bottom-up and top-down influence. LBP captures chains of contextual evidence. LBP naturally combines multiple contextual cues. Face Eye Nose Mouth

23 Conditional inference with LBP Contour completion with curve grammar.
24 Face detection p(x Y ) p(y X )p(x ) p(y X ) defined by templates for each symbol. Defines local evidence for each brick in the factor graph. Belief Propagation combines weak local evidence from all bricks.



25 Face detection results Ground Truth HOG Filters Face Grammar



26 Scenes with several faces HOG filters Grammar
 defined by a")
 defined by")

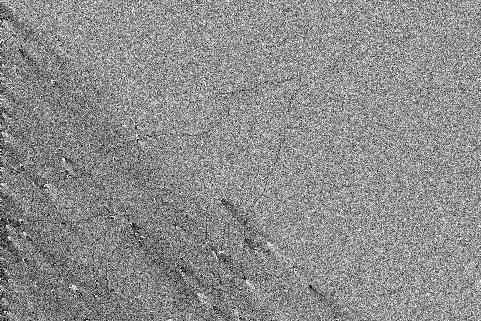
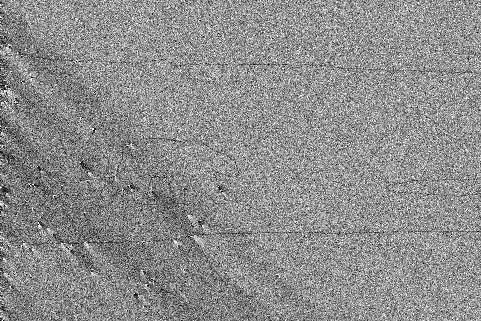
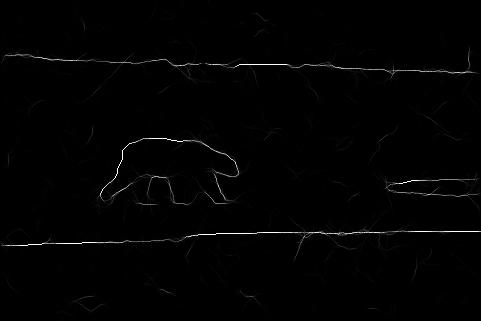
27 Curve detection p(x ) defined by a grammar for curves. p(y X ) defined by noisy observations at each pixel X Y

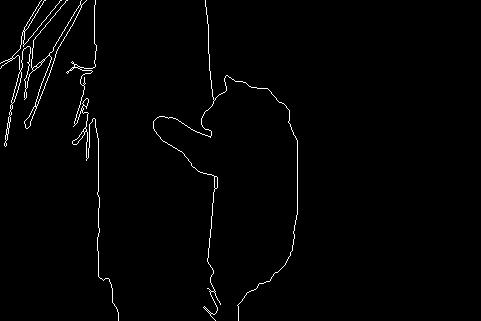
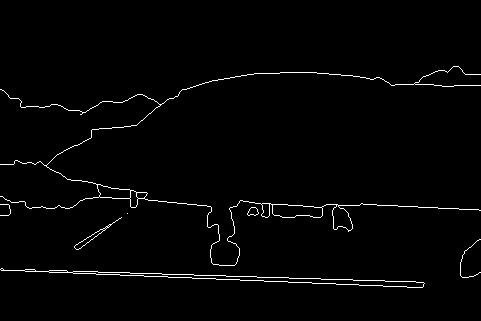
28 Curve detection dataset Ground-truth: human-drawn object boundaries from BSDS.


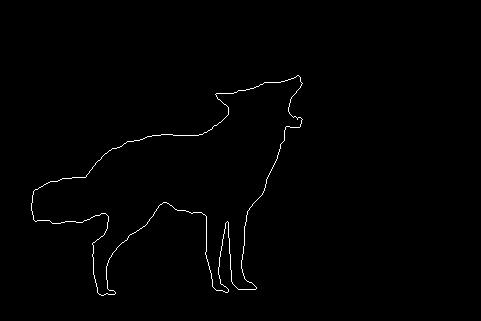

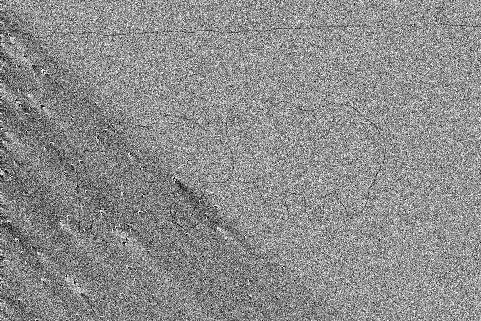
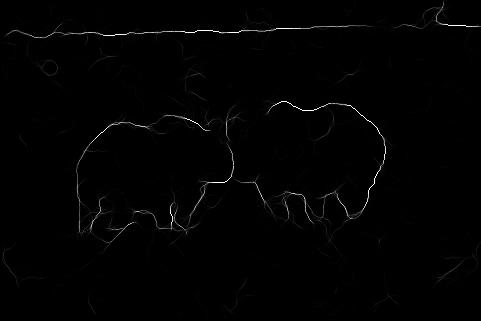
29 Curve detection results
30
31
32 Summary Perceptual inference requires models of the world. Stochastic grammars can model complex scenes. Part-based representation. Scenes and objects have variable structure. Belief propagation provides a general computational engine. The same framework applies to many different tasks.
33 Future work Data model p(y X ). Grammar learning. Scaling inference to larger grammars.

34 PERSON {FACE, ARMS, LOWER} FACE {EYES, NOSE, MOUTH} FACE {HAT, EYES, NOSE, MOUTH} EYES {EYE, EYE} EYES {SUNGLASSES} HAT {BASEBALL} HAT {SOMBRERO} LOWER {SHOE, SHOE, LEGS} LEGS {PANTS} LEGS {SKIRT}
Scene Grammars, Factor Graphs, and Belief Propagation
 Scene Grammars, Factor Graphs, and Belief Propagation Pedro Felzenszwalb Brown University Joint work with Jeroen Chua Probabilistic Scene Grammars General purpose framework for image understanding and
Scene Grammars, Factor Graphs, and Belief Propagation Pedro Felzenszwalb Brown University Joint work with Jeroen Chua Probabilistic Scene Grammars General purpose framework for image understanding and
arxiv: v2 [cs.cv] 30 Jul 2018
![arxiv: v2 [cs.cv] 30 Jul 2018](/thumbs/94/119465872.jpg "arxiv: v2 [cs.cv] 30 Jul 2018") Scene Grammars, Factor Graphs, and Belief Propagation Jeroen Chua Brown University Providence, RI, USA jeroen chua@alumni.brown.edu Pedro F. Felzenszwalb Brown University Providence, RI, USA pff@brown.edu
Scene Grammars, Factor Graphs, and Belief Propagation Jeroen Chua Brown University Providence, RI, USA jeroen chua@alumni.brown.edu Pedro F. Felzenszwalb Brown University Providence, RI, USA pff@brown.edu
arxiv: v1 [cs.cv] 3 Jun 2016
![arxiv: v1 [cs.cv] 3 Jun 2016](/thumbs/77/76643421.jpg "arxiv: v1 [cs.cv] 3 Jun 2016") Scene Grammars, Factor Graphs, and Belief Propagation arxiv:1606.01307v1 [cs.cv] 3 Jun 2016 Jeroen Chua Department of Computer Science Brown University jeroen_chua@brown.edu, Pedro F. Felzenszwalb School
Scene Grammars, Factor Graphs, and Belief Propagation arxiv:1606.01307v1 [cs.cv] 3 Jun 2016 Jeroen Chua Department of Computer Science Brown University jeroen_chua@brown.edu, Pedro F. Felzenszwalb School
Graphical Models for Computer Vision
 Graphical Models for Computer Vision Pedro F Felzenszwalb Brown University Joint work with Dan Huttenlocher, Joshua Schwartz, Ross Girshick, David McAllester, Deva Ramanan, Allie Shapiro, John Oberlin
Graphical Models for Computer Vision Pedro F Felzenszwalb Brown University Joint work with Dan Huttenlocher, Joshua Schwartz, Ross Girshick, David McAllester, Deva Ramanan, Allie Shapiro, John Oberlin
Machine Learning. Sourangshu Bhattacharya
 Machine Learning Sourangshu Bhattacharya Bayesian Networks Directed Acyclic Graph (DAG) Bayesian Networks General Factorization Curve Fitting Re-visited Maximum Likelihood Determine by minimizing sum-of-squares
Machine Learning Sourangshu Bhattacharya Bayesian Networks Directed Acyclic Graph (DAG) Bayesian Networks General Factorization Curve Fitting Re-visited Maximum Likelihood Determine by minimizing sum-of-squares
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
Segmentation. Bottom up Segmentation Semantic Segmentation
 Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Structured Models in. Dan Huttenlocher. June 2010
 Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
ELL 788 Computational Perception & Cognition July November 2015
 ELL 788 Computational Perception & Cognition July November 2015 Module 6 Role of context in object detection Objects and cognition Ambiguous objects Unfavorable viewing condition Context helps in object
ELL 788 Computational Perception & Cognition July November 2015 Module 6 Role of context in object detection Objects and cognition Ambiguous objects Unfavorable viewing condition Context helps in object
Learning and Recognizing Visual Object Categories Without First Detecting Features
 Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Algorithms for Markov Random Fields in Computer Vision
 Algorithms for Markov Random Fields in Computer Vision Dan Huttenlocher November, 2003 (Joint work with Pedro Felzenszwalb) Random Field Broadly applicable stochastic model Collection of n sites S Hidden
Algorithms for Markov Random Fields in Computer Vision Dan Huttenlocher November, 2003 (Joint work with Pedro Felzenszwalb) Random Field Broadly applicable stochastic model Collection of n sites S Hidden
Learning the Structure of Sum-Product Networks. Robert Gens Pedro Domingos
 Learning the Structure of Sum-Product Networks Robert Gens Pedro Domingos w 20 10x O(n) X Y LL PLL CLL CMLL Motivation SPN Structure Experiments Review Learning Graphical Models Representation Inference
Learning the Structure of Sum-Product Networks Robert Gens Pedro Domingos w 20 10x O(n) X Y LL PLL CLL CMLL Motivation SPN Structure Experiments Review Learning Graphical Models Representation Inference
CS242: Probabilistic Graphical Models Lecture 3: Factor Graphs & Variable Elimination
 CS242: Probabilistic Graphical Models Lecture 3: Factor Graphs & Variable Elimination Instructor: Erik Sudderth Brown University Computer Science September 11, 2014 Some figures and materials courtesy
CS242: Probabilistic Graphical Models Lecture 3: Factor Graphs & Variable Elimination Instructor: Erik Sudderth Brown University Computer Science September 11, 2014 Some figures and materials courtesy
Part II. C. M. Bishop PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 8: GRAPHICAL MODELS
 Part II C. M. Bishop PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 8: GRAPHICAL MODELS Converting Directed to Undirected Graphs (1) Converting Directed to Undirected Graphs (2) Add extra links between
Part II C. M. Bishop PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 8: GRAPHICAL MODELS Converting Directed to Undirected Graphs (1) Converting Directed to Undirected Graphs (2) Add extra links between
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Located Hidden Random Fields: Learning Discriminative Parts for Object Detection
 Located Hidden Random Fields: Learning Discriminative Parts for Object Detection Ashish Kapoor 1 and John Winn 2 1 MIT Media Laboratory, Cambridge, MA 02139, USA kapoor@media.mit.edu 2 Microsoft Research,
Located Hidden Random Fields: Learning Discriminative Parts for Object Detection Ashish Kapoor 1 and John Winn 2 1 MIT Media Laboratory, Cambridge, MA 02139, USA kapoor@media.mit.edu 2 Microsoft Research,
Image analysis. Computer Vision and Classification Image Segmentation. 7 Image analysis
 7 Computer Vision and Classification 413 / 458 Computer Vision and Classification The k-nearest-neighbor method The k-nearest-neighbor (knn) procedure has been used in data analysis and machine learning
7 Computer Vision and Classification 413 / 458 Computer Vision and Classification The k-nearest-neighbor method The k-nearest-neighbor (knn) procedure has been used in data analysis and machine learning
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
18 October, 2013 MVA ENS Cachan. Lecture 6: Introduction to graphical models Iasonas Kokkinos
 Machine Learning for Computer Vision 1 18 October, 2013 MVA ENS Cachan Lecture 6: Introduction to graphical models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Machine Learning for Computer Vision 1 18 October, 2013 MVA ENS Cachan Lecture 6: Introduction to graphical models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Deep Generative Models Variational Autoencoders
 Deep Generative Models Variational Autoencoders Sudeshna Sarkar 5 April 2017 Generative Nets Generative models that represent probability distributions over multiple variables in some way. Directed Generative
Deep Generative Models Variational Autoencoders Sudeshna Sarkar 5 April 2017 Generative Nets Generative models that represent probability distributions over multiple variables in some way. Directed Generative
Object Recognition Using Pictorial Structures. Daniel Huttenlocher Computer Science Department. In This Talk. Object recognition in computer vision
 Object Recognition Using Pictorial Structures Daniel Huttenlocher Computer Science Department Joint work with Pedro Felzenszwalb, MIT AI Lab In This Talk Object recognition in computer vision Brief definition
Object Recognition Using Pictorial Structures Daniel Huttenlocher Computer Science Department Joint work with Pedro Felzenszwalb, MIT AI Lab In This Talk Object recognition in computer vision Brief definition
22 October, 2012 MVA ENS Cachan. Lecture 5: Introduction to generative models Iasonas Kokkinos
 Machine Learning for Computer Vision 1 22 October, 2012 MVA ENS Cachan Lecture 5: Introduction to generative models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Machine Learning for Computer Vision 1 22 October, 2012 MVA ENS Cachan Lecture 5: Introduction to generative models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Regularization and Markov Random Fields (MRF) CS 664 Spring 2008
 CS 664 Spring 2008") Regularization and Markov Random Fields (MRF) CS 664 Spring 2008 Regularization in Low Level Vision Low level vision problems concerned with estimating some quantity at each pixel Visual motion (u(x,y),v(x,y))
Regularization and Markov Random Fields (MRF) CS 664 Spring 2008 Regularization in Low Level Vision Low level vision problems concerned with estimating some quantity at each pixel Visual motion (u(x,y),v(x,y))
Markov Random Fields and Gibbs Sampling for Image Denoising
 Markov Random Fields and Gibbs Sampling for Image Denoising Chang Yue Electrical Engineering Stanford University changyue@stanfoed.edu Abstract This project applies Gibbs Sampling based on different Markov
Markov Random Fields and Gibbs Sampling for Image Denoising Chang Yue Electrical Engineering Stanford University changyue@stanfoed.edu Abstract This project applies Gibbs Sampling based on different Markov
Human Upper Body Pose Estimation in Static Images
 1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 8: GRAPHICAL MODELS
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 8: GRAPHICAL MODELS Bayesian Networks Directed Acyclic Graph (DAG) Bayesian Networks General Factorization Bayesian Curve Fitting (1) Polynomial Bayesian
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 8: GRAPHICAL MODELS Bayesian Networks Directed Acyclic Graph (DAG) Bayesian Networks General Factorization Bayesian Curve Fitting (1) Polynomial Bayesian
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 5 Inference
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 5 Inference
CS 664 Flexible Templates. Daniel Huttenlocher
 CS 664 Flexible Templates Daniel Huttenlocher Flexible Template Matching Pictorial structures Parts connected by springs and appearance models for each part Used for human bodies, faces Fischler&Elschlager,
CS 664 Flexible Templates Daniel Huttenlocher Flexible Template Matching Pictorial structures Parts connected by springs and appearance models for each part Used for human bodies, faces Fischler&Elschlager,
A New Approach to Early Sketch Processing
 A New Approach to Early Sketch Processing Sonya Cates and Randall Davis MIT Computer Science and Artificial Intelligence Laboratory 32 Vassar Street Cambridge, MA 02139 {sjcates, davis}@csail.mit.edu Abstract
A New Approach to Early Sketch Processing Sonya Cates and Randall Davis MIT Computer Science and Artificial Intelligence Laboratory 32 Vassar Street Cambridge, MA 02139 {sjcates, davis}@csail.mit.edu Abstract
Computer Vision Group Prof. Daniel Cremers. 4a. Inference in Graphical Models
 Group Prof. Daniel Cremers 4a. Inference in Graphical Models Inference on a Chain (Rep.) The first values of µ α and µ β are: The partition function can be computed at any node: Overall, we have O(NK 2
Group Prof. Daniel Cremers 4a. Inference in Graphical Models Inference on a Chain (Rep.) The first values of µ α and µ β are: The partition function can be computed at any node: Overall, we have O(NK 2
Visual Motion Analysis and Tracking Part II
 Visual Motion Analysis and Tracking Part II David J Fleet and Allan D Jepson CIAR NCAP Summer School July 12-16, 16, 2005 Outline Optical Flow and Tracking: Optical flow estimation (robust, iterative refinement,
Visual Motion Analysis and Tracking Part II David J Fleet and Allan D Jepson CIAR NCAP Summer School July 12-16, 16, 2005 Outline Optical Flow and Tracking: Optical flow estimation (robust, iterative refinement,
A Sample of Monte Carlo Methods in Robotics and Vision. Credits. Outline. Structure from Motion. without Correspondences
 A Sample of Monte Carlo Methods in Robotics and Vision Frank Dellaert College of Computing Georgia Institute of Technology Credits Zia Khan Tucker Balch Michael Kaess Rafal Zboinski Ananth Ranganathan
A Sample of Monte Carlo Methods in Robotics and Vision Frank Dellaert College of Computing Georgia Institute of Technology Credits Zia Khan Tucker Balch Michael Kaess Rafal Zboinski Ananth Ranganathan
Chapter 21 A Stochastic Grammar for Natural Shapes
 Chapter 21 A Stochastic Grammar for Natural Shapes Pedro F. Felzenszwalb 21.1 Introduction In this chapter, we consider the problem of detecting objects using a generic model for natural shapes. A common
Chapter 21 A Stochastic Grammar for Natural Shapes Pedro F. Felzenszwalb 21.1 Introduction In this chapter, we consider the problem of detecting objects using a generic model for natural shapes. A common
A Hierarchical Compositional System for Rapid Object Detection
 A Hierarchical Compositional System for Rapid Object Detection Long Zhu and Alan Yuille Department of Statistics University of California at Los Angeles Los Angeles, CA 90095 {lzhu,yuille}@stat.ucla.edu
A Hierarchical Compositional System for Rapid Object Detection Long Zhu and Alan Yuille Department of Statistics University of California at Los Angeles Los Angeles, CA 90095 {lzhu,yuille}@stat.ucla.edu
Part I: HumanEva-I dataset and evaluation metrics
 Part I: HumanEva-I dataset and evaluation metrics Leonid Sigal Michael J. Black Department of Computer Science Brown University http://www.cs.brown.edu/people/ls/ http://vision.cs.brown.edu/humaneva/ Motivation
Part I: HumanEva-I dataset and evaluation metrics Leonid Sigal Michael J. Black Department of Computer Science Brown University http://www.cs.brown.edu/people/ls/ http://vision.cs.brown.edu/humaneva/ Motivation
COMP90051 Statistical Machine Learning
 COMP90051 Statistical Machine Learning Semester 2, 2016 Lecturer: Trevor Cohn 20. PGM Representation Next Lectures Representation of joint distributions Conditional/marginal independence * Directed vs
COMP90051 Statistical Machine Learning Semester 2, 2016 Lecturer: Trevor Cohn 20. PGM Representation Next Lectures Representation of joint distributions Conditional/marginal independence * Directed vs
CRFs for Image Classification
 CRFs for Image Classification Devi Parikh and Dhruv Batra Carnegie Mellon University Pittsburgh, PA 15213 {dparikh,dbatra}@ece.cmu.edu Abstract We use Conditional Random Fields (CRFs) to classify regions
CRFs for Image Classification Devi Parikh and Dhruv Batra Carnegie Mellon University Pittsburgh, PA 15213 {dparikh,dbatra}@ece.cmu.edu Abstract We use Conditional Random Fields (CRFs) to classify regions
Learning Deep Structured Models for Semantic Segmentation. Guosheng Lin
 Learning Deep Structured Models for Semantic Segmentation Guosheng Lin Semantic Segmentation Outline Exploring Context with Deep Structured Models Guosheng Lin, Chunhua Shen, Ian Reid, Anton van dan Hengel;
Learning Deep Structured Models for Semantic Segmentation Guosheng Lin Semantic Segmentation Outline Exploring Context with Deep Structured Models Guosheng Lin, Chunhua Shen, Ian Reid, Anton van dan Hengel;
STAT 598L Probabilistic Graphical Models. Instructor: Sergey Kirshner. Exact Inference
 STAT 598L Probabilistic Graphical Models Instructor: Sergey Kirshner Exact Inference What To Do With Bayesian/Markov Network? Compact representation of a complex model, but Goal: efficient extraction of
STAT 598L Probabilistic Graphical Models Instructor: Sergey Kirshner Exact Inference What To Do With Bayesian/Markov Network? Compact representation of a complex model, but Goal: efficient extraction of
A SYNTAX FOR IMAGE UNDERSTANDING
 A SYNTAX FOR IMAGE UNDERSTANDING Narendra Ahuja University of Illinois at Urbana-Champaign May 21, 2009 Work Done with. Sinisa Todorovic, Mark Tabb, Himanshu Arora, Varsha. Hedau, Bernard Ghanem, Tim Cheng.
A SYNTAX FOR IMAGE UNDERSTANDING Narendra Ahuja University of Illinois at Urbana-Champaign May 21, 2009 Work Done with. Sinisa Todorovic, Mark Tabb, Himanshu Arora, Varsha. Hedau, Bernard Ghanem, Tim Cheng.
Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing
 Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200,
Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200,
Generative and discriminative classification techniques
 Generative and discriminative classification techniques Machine Learning and Category Representation 2014-2015 Jakob Verbeek, November 28, 2014 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.14.15
Generative and discriminative classification techniques Machine Learning and Category Representation 2014-2015 Jakob Verbeek, November 28, 2014 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.14.15
Pattern Recognition. Kjell Elenius. Speech, Music and Hearing KTH. March 29, 2007 Speech recognition
 Pattern Recognition Kjell Elenius Speech, Music and Hearing KTH March 29, 2007 Speech recognition 2007 1 Ch 4. Pattern Recognition 1(3) Bayes Decision Theory Minimum-Error-Rate Decision Rules Discriminant
Pattern Recognition Kjell Elenius Speech, Music and Hearing KTH March 29, 2007 Speech recognition 2007 1 Ch 4. Pattern Recognition 1(3) Bayes Decision Theory Minimum-Error-Rate Decision Rules Discriminant
CS839: Probabilistic Graphical Models. Lecture 10: Learning with Partially Observed Data. Theo Rekatsinas
 CS839: Probabilistic Graphical Models Lecture 10: Learning with Partially Observed Data Theo Rekatsinas 1 Partially Observed GMs Speech recognition 2 Partially Observed GMs Evolution 3 Partially Observed
CS839: Probabilistic Graphical Models Lecture 10: Learning with Partially Observed Data Theo Rekatsinas 1 Partially Observed GMs Speech recognition 2 Partially Observed GMs Evolution 3 Partially Observed
Introduction to Machine Learning
 Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 2: Probability: Discrete Random Variables Classification: Validation & Model Selection Many figures
Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 2: Probability: Discrete Random Variables Classification: Validation & Model Selection Many figures
Age Invariant Face Recognition Aman Jain & Nikhil Rasiwasia Under the Guidance of Prof R M K Sinha EE372 - Computer Vision and Document Processing
 Age Invariant Face Recognition Aman Jain & Nikhil Rasiwasia Under the Guidance of Prof R M K Sinha EE372 - Computer Vision and Document Processing A. Final Block Diagram of the system B. Detecting Facial
Age Invariant Face Recognition Aman Jain & Nikhil Rasiwasia Under the Guidance of Prof R M K Sinha EE372 - Computer Vision and Document Processing A. Final Block Diagram of the system B. Detecting Facial
Probabilistic Robotics
 Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Switching Hypothesized Measurements: A Dynamic Model with Applications to Occlusion Adaptive Joint Tracking
 Switching Hypothesized Measurements: A Dynamic Model with Applications to Occlusion Adaptive Joint Tracking Yang Wang Tele Tan Institute for Infocomm Research, Singapore {ywang, telctan}@i2r.a-star.edu.sg
Switching Hypothesized Measurements: A Dynamic Model with Applications to Occlusion Adaptive Joint Tracking Yang Wang Tele Tan Institute for Infocomm Research, Singapore {ywang, telctan}@i2r.a-star.edu.sg
D-Separation. b) the arrows meet head-to-head at the node, and neither the node, nor any of its descendants, are in the set C.
 the arrows meet head-to-head at the node, and neither the node, nor any of its descendants, are in the set C.") D-Separation Say: A, B, and C are non-intersecting subsets of nodes in a directed graph. A path from A to B is blocked by C if it contains a node such that either a) the arrows on the path meet either
D-Separation Say: A, B, and C are non-intersecting subsets of nodes in a directed graph. A path from A to B is blocked by C if it contains a node such that either a) the arrows on the path meet either
Contextual Recognition of Hand-drawn Diagrams with Conditional Random Fields
 Contextual Recognition of Hand-drawn Diagrams with Conditional Random Fields Martin Szummer, Yuan Qi Microsoft Research, 7 J J Thomson Avenue, Cambridge CB3 0FB, UK szummer@microsoft.com, yuanqi@media.mit.edu
Contextual Recognition of Hand-drawn Diagrams with Conditional Random Fields Martin Szummer, Yuan Qi Microsoft Research, 7 J J Thomson Avenue, Cambridge CB3 0FB, UK szummer@microsoft.com, yuanqi@media.mit.edu
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Expectation Maximization. Machine Learning 10701/15781 Carlos Guestrin Carnegie Mellon University
 Expectation Maximization Machine Learning 10701/15781 Carlos Guestrin Carnegie Mellon University April 10 th, 2006 1 Announcements Reminder: Project milestone due Wednesday beginning of class 2 Coordinate
Expectation Maximization Machine Learning 10701/15781 Carlos Guestrin Carnegie Mellon University April 10 th, 2006 1 Announcements Reminder: Project milestone due Wednesday beginning of class 2 Coordinate
Cue Integration for Figure/Ground Labeling
 Cue Integration for Figure/Ground Labeling Xiaofeng Ren, Charless C. Fowlkes and Jitendra Malik Computer Science Division, University of California, Berkeley, CA 94720 {xren,fowlkes,malik}@cs.berkeley.edu
Cue Integration for Figure/Ground Labeling Xiaofeng Ren, Charless C. Fowlkes and Jitendra Malik Computer Science Division, University of California, Berkeley, CA 94720 {xren,fowlkes,malik}@cs.berkeley.edu
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences
 Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
Computer Vision Group Prof. Daniel Cremers. 4. Probabilistic Graphical Models Directed Models
 Prof. Daniel Cremers 4. Probabilistic Graphical Models Directed Models The Bayes Filter (Rep.) (Bayes) (Markov) (Tot. prob.) (Markov) (Markov) 2 Graphical Representation (Rep.) We can describe the overall
Prof. Daniel Cremers 4. Probabilistic Graphical Models Directed Models The Bayes Filter (Rep.) (Bayes) (Markov) (Tot. prob.) (Markov) (Markov) 2 Graphical Representation (Rep.) We can describe the overall
Learning to parse images of articulated bodies
 Learning to parse images of articulated bodies Deva Ramanan Toyota Technological Institute at Chicago Chicago, IL 60637 ramanan@tti-c.org Abstract We consider the machine vision task of pose estimation
Learning to parse images of articulated bodies Deva Ramanan Toyota Technological Institute at Chicago Chicago, IL 60637 ramanan@tti-c.org Abstract We consider the machine vision task of pose estimation
Problem Set 4. Assigned: March 23, 2006 Due: April 17, (6.882) Belief Propagation for Segmentation
 Belief Propagation for Segmentation") 6.098/6.882 Computational Photography 1 Problem Set 4 Assigned: March 23, 2006 Due: April 17, 2006 Problem 1 (6.882) Belief Propagation for Segmentation In this problem you will set-up a Markov Random
6.098/6.882 Computational Photography 1 Problem Set 4 Assigned: March 23, 2006 Due: April 17, 2006 Problem 1 (6.882) Belief Propagation for Segmentation In this problem you will set-up a Markov Random
2/15/2009. Part-Based Models. Andrew Harp. Part Based Models. Detect object from physical arrangement of individual features
 Part-Based Models Andrew Harp Part Based Models Detect object from physical arrangement of individual features 1 Implementation Based on the Simple Parts and Structure Object Detector by R. Fergus Allows
Part-Based Models Andrew Harp Part Based Models Detect object from physical arrangement of individual features 1 Implementation Based on the Simple Parts and Structure Object Detector by R. Fergus Allows
Scale-Invariant Contour Completion using Conditional Random Fields
 Scale-Invariant Contour Completion using Conditional Random Fields Xiaofeng Ren, Charless C. Fowlkes, Jitendra Malik Computer Science Division University of California, Berkeley, CA 9472 {xren,fowlkes,malik}@cs.berkeley.edu
Scale-Invariant Contour Completion using Conditional Random Fields Xiaofeng Ren, Charless C. Fowlkes, Jitendra Malik Computer Science Division University of California, Berkeley, CA 9472 {xren,fowlkes,malik}@cs.berkeley.edu
Translation Symmetry Detection: A Repetitive Pattern Analysis Approach
 2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
Particle Filtering. CS6240 Multimedia Analysis. Leow Wee Kheng. Department of Computer Science School of Computing National University of Singapore
 Particle Filtering CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS6240) Particle Filtering 1 / 28 Introduction Introduction
Particle Filtering CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS6240) Particle Filtering 1 / 28 Introduction Introduction
Lecture 3: Conditional Independence - Undirected
 CS598: Graphical Models, Fall 2016 Lecture 3: Conditional Independence - Undirected Lecturer: Sanmi Koyejo Scribe: Nate Bowman and Erin Carrier, Aug. 30, 2016 1 Review for the Bayes-Ball Algorithm Recall
CS598: Graphical Models, Fall 2016 Lecture 3: Conditional Independence - Undirected Lecturer: Sanmi Koyejo Scribe: Nate Bowman and Erin Carrier, Aug. 30, 2016 1 Review for the Bayes-Ball Algorithm Recall
Graphical Models & HMMs
 Graphical Models & HMMs Henrik I. Christensen Robotics & Intelligent Machines @ GT Georgia Institute of Technology, Atlanta, GA 30332-0280 hic@cc.gatech.edu Henrik I. Christensen (RIM@GT) Graphical Models
Graphical Models & HMMs Henrik I. Christensen Robotics & Intelligent Machines @ GT Georgia Institute of Technology, Atlanta, GA 30332-0280 hic@cc.gatech.edu Henrik I. Christensen (RIM@GT) Graphical Models
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM
 CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
9.913 Pattern Recognition for Vision. Class I - Overview. Instructors: B. Heisele, Y. Ivanov, T. Poggio
 9.913 Class I - Overview Instructors: B. Heisele, Y. Ivanov, T. Poggio TOC Administrivia Problems of Computer Vision and Pattern Recognition Overview of classes Quick review of Matlab Administrivia Instructors:
9.913 Class I - Overview Instructors: B. Heisele, Y. Ivanov, T. Poggio TOC Administrivia Problems of Computer Vision and Pattern Recognition Overview of classes Quick review of Matlab Administrivia Instructors:
Probabilistic Graphical Models
 Overview of Part Two Probabilistic Graphical Models Part Two: Inference and Learning Christopher M. Bishop Exact inference and the junction tree MCMC Variational methods and EM Example General variational
Overview of Part Two Probabilistic Graphical Models Part Two: Inference and Learning Christopher M. Bishop Exact inference and the junction tree MCMC Variational methods and EM Example General variational
Measure Locally, Reason Globally: Occlusion-sensitive Articulated Pose Estimation
 Measure Locally, Reason Globally: Occlusion-sensitive Articulated Pose Estimation Leonid Sigal Michael J. Black Department of Computer Science, Brown University, Providence, RI 02912 {ls,black}@cs.brown.edu
Measure Locally, Reason Globally: Occlusion-sensitive Articulated Pose Estimation Leonid Sigal Michael J. Black Department of Computer Science, Brown University, Providence, RI 02912 {ls,black}@cs.brown.edu
Introduction to Pattern Recognition Part II. Selim Aksoy Bilkent University Department of Computer Engineering
 Introduction to Pattern Recognition Part II Selim Aksoy Bilkent University Department of Computer Engineering saksoy@cs.bilkent.edu.tr RETINA Pattern Recognition Tutorial, Summer 2005 Overview Statistical
Introduction to Pattern Recognition Part II Selim Aksoy Bilkent University Department of Computer Engineering saksoy@cs.bilkent.edu.tr RETINA Pattern Recognition Tutorial, Summer 2005 Overview Statistical
Lecture 9: Undirected Graphical Models Machine Learning
 Lecture 9: Undirected Graphical Models Machine Learning Andrew Rosenberg March 5, 2010 1/1 Today Graphical Models Probabilities in Undirected Graphs 2/1 Undirected Graphs What if we allow undirected graphs?
Lecture 9: Undirected Graphical Models Machine Learning Andrew Rosenberg March 5, 2010 1/1 Today Graphical Models Probabilities in Undirected Graphs 2/1 Undirected Graphs What if we allow undirected graphs?
Bayesian Networks Inference (continued) Learning
 Learning") Learning BN tutorial: ftp://ftp.research.microsoft.com/pub/tr/tr-95-06.pdf TAN paper: http://www.cs.huji.ac.il/~nir/abstracts/frgg1.html Bayesian Networks Inference (continued) Learning Machine Learning
Learning BN tutorial: ftp://ftp.research.microsoft.com/pub/tr/tr-95-06.pdf TAN paper: http://www.cs.huji.ac.il/~nir/abstracts/frgg1.html Bayesian Networks Inference (continued) Learning Machine Learning
Statistical and Learning Techniques in Computer Vision Lecture 1: Markov Random Fields Jens Rittscher and Chuck Stewart
 Statistical and Learning Techniques in Computer Vision Lecture 1: Markov Random Fields Jens Rittscher and Chuck Stewart 1 Motivation Up to now we have considered distributions of a single random variable
Statistical and Learning Techniques in Computer Vision Lecture 1: Markov Random Fields Jens Rittscher and Chuck Stewart 1 Motivation Up to now we have considered distributions of a single random variable
Applied Bayesian Nonparametrics 5. Spatial Models via Gaussian Processes, not MRFs Tutorial at CVPR 2012 Erik Sudderth Brown University
 Applied Bayesian Nonparametrics 5. Spatial Models via Gaussian Processes, not MRFs Tutorial at CVPR 2012 Erik Sudderth Brown University NIPS 2008: E. Sudderth & M. Jordan, Shared Segmentation of Natural
Applied Bayesian Nonparametrics 5. Spatial Models via Gaussian Processes, not MRFs Tutorial at CVPR 2012 Erik Sudderth Brown University NIPS 2008: E. Sudderth & M. Jordan, Shared Segmentation of Natural
Evaluation of Moving Object Tracking Techniques for Video Surveillance Applications
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
Tracking in Action Space
 Tracking in Action Space Dennis L. Herzog, and Volker Krüger Copenhagen Institute of Technology, Aalborg University, Lautrupvang 2, 2750 Ballerup, Denmark {deh,vok}@cvmi.aau.dk Abstract. The recognition
Tracking in Action Space Dennis L. Herzog, and Volker Krüger Copenhagen Institute of Technology, Aalborg University, Lautrupvang 2, 2750 Ballerup, Denmark {deh,vok}@cvmi.aau.dk Abstract. The recognition
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Detection of Man-made Structures in Natural Images
 Detection of Man-made Structures in Natural Images Tim Rees December 17, 2004 Abstract Object detection in images is a very active research topic in many disciplines. Probabilistic methods have been applied
Detection of Man-made Structures in Natural Images Tim Rees December 17, 2004 Abstract Object detection in images is a very active research topic in many disciplines. Probabilistic methods have been applied
Day 3 Lecture 1. Unsupervised Learning
 Day 3 Lecture 1 Unsupervised Learning Semi-supervised and transfer learning Myth: you can t do deep learning unless you have a million labelled examples for your problem. Reality You can learn useful representations
Day 3 Lecture 1 Unsupervised Learning Semi-supervised and transfer learning Myth: you can t do deep learning unless you have a million labelled examples for your problem. Reality You can learn useful representations
Optimal Denoising of Natural Images and their Multiscale Geometry and Density
 Optimal Denoising of Natural Images and their Multiscale Geometry and Density Department of Computer Science and Applied Mathematics Weizmann Institute of Science, Israel. Joint work with Anat Levin (WIS),
Optimal Denoising of Natural Images and their Multiscale Geometry and Density Department of Computer Science and Applied Mathematics Weizmann Institute of Science, Israel. Joint work with Anat Levin (WIS),
Cambridge Interview Technical Talk
 Cambridge Interview Technical Talk February 2, 2010 Table of contents Causal Learning 1 Causal Learning Conclusion 2 3 Motivation Recursive Segmentation Learning Causal Learning Conclusion Causal learning
Cambridge Interview Technical Talk February 2, 2010 Table of contents Causal Learning 1 Causal Learning Conclusion 2 3 Motivation Recursive Segmentation Learning Causal Learning Conclusion Causal learning
Machine Learning. B. Unsupervised Learning B.1 Cluster Analysis. Lars Schmidt-Thieme, Nicolas Schilling
 Machine Learning B. Unsupervised Learning B.1 Cluster Analysis Lars Schmidt-Thieme, Nicolas Schilling Information Systems and Machine Learning Lab (ISMLL) Institute for Computer Science University of Hildesheim,
Machine Learning B. Unsupervised Learning B.1 Cluster Analysis Lars Schmidt-Thieme, Nicolas Schilling Information Systems and Machine Learning Lab (ISMLL) Institute for Computer Science University of Hildesheim,
Conditional Random Fields for Object Recognition
 Conditional Random Fields for Object Recognition Ariadna Quattoni Michael Collins Trevor Darrell MIT Computer Science and Artificial Intelligence Laboratory Cambridge, MA 02139 {ariadna, mcollins, trevor}@csail.mit.edu
Conditional Random Fields for Object Recognition Ariadna Quattoni Michael Collins Trevor Darrell MIT Computer Science and Artificial Intelligence Laboratory Cambridge, MA 02139 {ariadna, mcollins, trevor}@csail.mit.edu
What is machine learning?
 Machine learning, pattern recognition and statistical data modelling Lecture 12. The last lecture Coryn Bailer-Jones 1 What is machine learning? Data description and interpretation finding simpler relationship
Machine learning, pattern recognition and statistical data modelling Lecture 12. The last lecture Coryn Bailer-Jones 1 What is machine learning? Data description and interpretation finding simpler relationship
Context Based Object Categorization: A Critical Survey
 Context Based Object Categorization: A Critical Survey Carolina Galleguillos 1 Serge Belongie 1,2 1 Computer Science and Engineering, University of California, San Diego 2 Electrical Engineering, California
Context Based Object Categorization: A Critical Survey Carolina Galleguillos 1 Serge Belongie 1,2 1 Computer Science and Engineering, University of California, San Diego 2 Electrical Engineering, California
10-701/15-781, Fall 2006, Final
 -7/-78, Fall 6, Final Dec, :pm-8:pm There are 9 questions in this exam ( pages including this cover sheet). If you need more room to work out your answer to a question, use the back of the page and clearly
-7/-78, Fall 6, Final Dec, :pm-8:pm There are 9 questions in this exam ( pages including this cover sheet). If you need more room to work out your answer to a question, use the back of the page and clearly
Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization
 Statistical Techniques in Robotics (16-831, F11) Lecture#20 (November 21, 2011) Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization Lecturer: Drew Bagnell Scribes: Junier Oliva 1 1 Comments on
Statistical Techniques in Robotics (16-831, F11) Lecture#20 (November 21, 2011) Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization Lecturer: Drew Bagnell Scribes: Junier Oliva 1 1 Comments on
Nested Sampling: Introduction and Implementation
 UNIVERSITY OF TEXAS AT SAN ANTONIO Nested Sampling: Introduction and Implementation Liang Jing May 2009 1 1 ABSTRACT Nested Sampling is a new technique to calculate the evidence, Z = P(D M) = p(d θ, M)p(θ
UNIVERSITY OF TEXAS AT SAN ANTONIO Nested Sampling: Introduction and Implementation Liang Jing May 2009 1 1 ABSTRACT Nested Sampling is a new technique to calculate the evidence, Z = P(D M) = p(d θ, M)p(θ
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
CS 1674: Intro to Computer Vision. Attributes. Prof. Adriana Kovashka University of Pittsburgh November 2, 2016
 CS 1674: Intro to Computer Vision Attributes Prof. Adriana Kovashka University of Pittsburgh November 2, 2016 Plan for today What are attributes and why are they useful? (paper 1) Attributes for zero-shot
CS 1674: Intro to Computer Vision Attributes Prof. Adriana Kovashka University of Pittsburgh November 2, 2016 Plan for today What are attributes and why are they useful? (paper 1) Attributes for zero-shot
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization. Wolfram Burgard
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
OCCLUSION BOUNDARIES ESTIMATION FROM A HIGH-RESOLUTION SAR IMAGE
 OCCLUSION BOUNDARIES ESTIMATION FROM A HIGH-RESOLUTION SAR IMAGE Wenju He, Marc Jäger, and Olaf Hellwich Berlin University of Technology FR3-1, Franklinstr. 28, 10587 Berlin, Germany {wenjuhe, jaeger,
OCCLUSION BOUNDARIES ESTIMATION FROM A HIGH-RESOLUTION SAR IMAGE Wenju He, Marc Jäger, and Olaf Hellwich Berlin University of Technology FR3-1, Franklinstr. 28, 10587 Berlin, Germany {wenjuhe, jaeger,
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Clustering Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann Clustering (1) Common technique for statistical data analysis (machine learning,
Introduction to Mobile Robotics Clustering Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann Clustering (1) Common technique for statistical data analysis (machine learning,
Content-based image and video analysis. Machine learning
 Content-based image and video analysis Machine learning for multimedia retrieval 04.05.2009 What is machine learning? Some problems are very hard to solve by writing a computer program by hand Almost all
Content-based image and video analysis Machine learning for multimedia retrieval 04.05.2009 What is machine learning? Some problems are very hard to solve by writing a computer program by hand Almost all
Motion and Tracking. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Max-Product Particle Belief Propagation
 Max-Product Particle Belief Propagation Rajkumar Kothapa Department of Computer Science Brown University Providence, RI 95 rjkumar@cs.brown.edu Jason Pacheco Department of Computer Science Brown University
Max-Product Particle Belief Propagation Rajkumar Kothapa Department of Computer Science Brown University Providence, RI 95 rjkumar@cs.brown.edu Jason Pacheco Department of Computer Science Brown University
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
A novel template matching method for human detection
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2009 A novel template matching method for human detection Duc Thanh Nguyen
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2009 A novel template matching method for human detection Duc Thanh Nguyen
Postprint.
 http://www.diva-portal.org Postprint This is the accepted version of a paper presented at 14th International Conference of the Biometrics Special Interest Group, BIOSIG, Darmstadt, Germany, 9-11 September,
http://www.diva-portal.org Postprint This is the accepted version of a paper presented at 14th International Conference of the Biometrics Special Interest Group, BIOSIG, Darmstadt, Germany, 9-11 September,
Body Parts Dependent Joint Regressors for Human Pose Estimation in Still Images
 Research Collection Journal Article Body Parts Dependent Joint Regressors for Human Pose Estimation in Still Images Author(s): Dantone, Matthias; Gall, Juergen; Leistner, Christian; Van Gool, Luc Publication
Research Collection Journal Article Body Parts Dependent Joint Regressors for Human Pose Estimation in Still Images Author(s): Dantone, Matthias; Gall, Juergen; Leistner, Christian; Van Gool, Luc Publication
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer